#help-with-linux-sbcs
1 messages · Page 24 of 1
because folders are supposed to represent submodules
So if you're writing code that lives in a folder and is imported by main code?
you would use from . import foo?
yeah
that makes sense
import only looks in the sys.path in python, with "" meaning the directory of the main file (or repl)
ahh neat thanks for the info
I have to go to my system which is away from wifi but I really appreciate your assistance
(whereas in PHP for example it always looks in the current file's directory too)
I'm having a problem with the 3.5 Inch touchscreen display that Adafruit has to offer. When ever I load Octoprint on my pi, the touchscreen doesn't register any input. How do I fix that?
Having a weird issue when I import my testing script into the repl
I have a method switch_to(pin) that turns off all pins except the one you pass in which gets turned high. When I run in the REPL:
import testing
testing.switch_to(2)
Gives me the runtime error "Please set pin numbering using GPIO.setmode(GPIO.BOARD) or GPIO.setmode(GPIO.BCM)"
However I do this at the top of my testing.py script, using GPIO.BCM.
@ruby night The slow clocking of the I2C for the pi 3&4 was a no-go as well on the MCP9600... even down to 1khz. I tried 1khz, 5khz, 10khz, 25khz, 50khz and 100khz... none of those worked.. I'd say this is just a device that does not work on the rpi. The feather works a charm though, so I'll use a lora radio and bop the readings over to a data manager. Thanks for the input here.. good group.
I agree. Glad you found a way forward. It’s always nice to find away to add a radio into a project .😉 Good luck with it!
Yoda speaks using MP3 files, PyGame & an Adafruit Crickit, but as you can see from video in the two tweets below, sound starts out clear, but by the next day sound is distorted. It's not getting worse with each play, time the code is running seems to be the factor. A reboot seems to fix the issue. Any ideas why this is happening?
Here is Yoda after reboot - he sounds clear: https://twitter.com/gallaugher/status/1484300117213597696?s=20
And here is Yoda the next morning - you can hear his distortion: https://twitter.com/gallaugher/status/1484535176625590275?s=20

Yoda has some advice for my coding students if you touch his right hand. He’ll be in Fulton 460c so you can try out all of his phrases. #iOSDev #CircuitPython https://t.co/fAxRnoqcYG

CircuitPython & @Raspberry_Pi peeps, any idea why sound gets gravelly after being on overnight? Reboot resets to distortion-free sound but unsure what’s up. Am using a Crickit & PyGame for audio on the Pi. You can hear this is distorted vs clear version posted last night. https://t.co/RHtijSpFs8
I have a question what is the different between this 2 pies ?


odd -- the bottom one has a BCM2837B0 which should be on a 3 B+ .... https://www.raspberrypi.com/documentation/computers/processors.html
so the bottom is beter
looks like it can be run a bit faster, but I have no idea if it really makes any difference in practice. Mine are all like the top one.
but it looks like Waveshare makes them differently https://www.waveshare.com/rpi3-b.htm
thx
Using Pi 0 and 16 channel bonnet: where do I wire 2 buttons for GPIO to operate servos? I have 9 servo's. I want Button 1 to operate 4 servos and Button 2 to operate 5 servos. Do I wire the button to the bonnet, or the Pi? I did the Adafruit tutorials: wired a button to Pi0 GPIO 5 to turn an LED on and off. Put the servo bonnet on and ran the program to move servo's around. ...but now, how do I wire and program 2 buttons to operate the servos?

Current set up. Soldered wires to PiZero GPIO 5 and 6 and ground.

The program I'm less familiar with, but those numbered holes correspond to the associated GPIO on the Pi. They are connected to each other, so you can use whichever is more convenient for you.
The software will have to detect the button change state, so you will have to wire them to an input and a GND or 3.3V, depending on pull direction.

A great starter hardware project using the Raspberry Pi is hooking up a simple tactile switch to the Raspberry GPIO and detecting button presses in Python. This guide will guide you through setting up the circuit with the Raspberry Pi and reading the state of the button in Python.
@mental flicker yep. use that row on the bonnet. that's what it's there for - general purpose tie in to PI GPIO.
the bonnet itself only uses SCL/SDA
Okay, I'll desolder GPIO 5 and 6 on the Pi Zero board, and the ground for the button can go to the ground above servo 3?

My current bonnet

No, don't desolder those. The buttons should just work if you connect them normally.
Already desoldered from Pi and resoldered to the bonnet

How are you connecting the 2x20 row of pins at the top of the two boards?

Oh, I see, you meant the wires. I thought you were desoldering the pins haha
With this picture, it is all a matter of programming now? green from #5 on the bonnet to the blue button on the bread board. yellow from the #6 bonnet to the yellow button on the bread board, and ground (black wire) from the ground above servo attach point 3 to the negative (picture shows black jumper going into the + (red line on bread board, I just changed it now).

move this to ground rail on breadboard so it connects to buttons?

then enable internal pull ups on the button GPIO pins
Thank You!! I appreciate you catching that! Right after I posted, I noticed it and moved it to ground. Reading about pull ups, just not understanding. I think I'm overthinking, except... my brain is dead.
Hi All - curious if anyone else here is using Oh My Zsh on their RPi. I have it installed, and it ALMOST works as expected. I get funny characters instead of the symbols I'm expecting.
I suspect it's probably a font issue of some kind, but I have tried a couple of things I found searching around, and it has not fixed the problem.
For example, here's a comparison between the prompt I get on my Mac vs. RPi. Running the same theme.

In this discussion, it says the first 8 GPIO's have pull ups set, the rest are pull down. Does this mean I don't have to make any programming changes to ensure GPIO 5 and 6 are pull up? https://forums.raspberrypi.com/viewtopic.php?t=202568
Also in the picture of my board I do not have any power going to the buttons. GPIO 5 (green wire) goes to the blue button, GPIO 6 (yellow wire) goes to the yellow button, the other side of the button they both go to ground. Nor do I have any resistors.
have you worked with buttons before, and the general concept of pull up/down resistors?
I wired buttons to run a sound board from Adafruit. I just assumed they complete a circuit to allow a program to run. No clue about pull up/down. Reading about it now. I see all kinds of examples showing power going to the buttons. https://raspberrypihq.com/use-a-push-button-with-raspberry-pi-gpio/

A great starter hardware project using the Raspberry Pi is hooking up a simple tactile switch to the Raspberry GPIO and detecting button presses in Python. This guide will guide you through setting up the circuit with the Raspberry Pi and reading the state of the button in Python.
see if this write up helps:
https://learn.adafruit.com/circuit-playground-digital-input/floating-inputs
and read the pull up/down sections also
it helps to understand what the general issue is (floating input) and how it can be fixed (pull up/down resistor)
enabling internal pull ups is a circuit python programming step, correct? Not a physical wiring /resistor, etc... matter?
first comes the capability of the hardware - in the BCM chip on the Raspberry Pi
not everything provides internal pull up/down resistors
some provide only one
i think pi is pull up only
then comes the software to use the hardware, which should include some way to specify enabling the internal pull up resistors
here's the general GPIO discussion specific to CircuitPython:
https://learn.adafruit.com/circuitpython-essentials/circuitpython-digital-in-out
switch.pull = Pull.UP
that's an example of code line that enable the internal pull up
Interesting. They give examples of using a 10k resistor. Since I want to pull it up (not sure why up instead of down) is it best to add power to the switch and use a 10k resistor, to physically make sure it is pulled up? If I understand correctly, if I put the 10k resistor to the ground, that will physically pull it down.
learn guide linked explains up vs. down
you only need external resistor if internal ones are not available
for the pi, internal pull ups are available
Ok, cool. Sorry just finished the floating pages and starting the learned guide
read next two sections also
Pull It Up and Pull It Down
oh, and Which Way?
although that last one doesn't really answer it fully..:)
lol, 'which to use... it depends!'
you only have pull ups available. so easy choice in your case.
also, perfectly fine option
Thank you, and I confirm it with making sure the circuit python code has: switch.pull = Pull.UP
having a weird issue where flashdrives don't mount on a pi (I have had this issue in the past but my workaround is now not working). The SD card with the OS was previously in a 3B+ but I moved it to a 3A+ for reasons. I'm trying to get a .py file off the desktop onto a flashdrive. However, the flashdrive doesn't appear as normal, it shows up in /media/pi but I can't eject it and can't copy stuff to it.
In the past I have copied stuff to \boot and then used windows to get the files onto my PC. But now I'm getting "permission denied" errors when I try to copy/paste my py file.
Anyone have any ideas what I should try next?
I thought Pi is configurable, and by default they're like half of them up other half down or something?
does it have pull downs? it's been long enough i really am not sure.
too many MCUs to keep track of 🙂
it totally might...
lemme check
I was having a problem finding .py files. I installed WinSCP and used it to log into Pi and then I could easily move things around from my computer to the SD card that is on the Pi
A GPIO pin designated as an input pin can be read as high (3V3) or low (0V). This is made easier with the use of internal pull-up or pull-down resistors. Pins GPIO2 and GPIO3 have fixed pull-up resistors, but for other pins this can be configured in software.
So two particular pins are missing pulldown because IIRC those would be the primary I2C pins.
I have over 20 windows open, trying to learn, and I've seen so many things. I did read the first 8 were default to pull up. The rest pull down.
Should not matter if it is pull up or pull down, because I will put in the code to pull it up, right?
@mental flicker ok, i think i was wrong saying only ups were available. but you'd wire differently depending on which you use (see same learn guide linked)
code logic would change also
In any case, for most cases, you shouldn't have to worry about using one over the other. The important part is to make sure whichever configuration you use, your software definitions matches your wiring.
@turbid rivet thanks for checking my rusty knowledge 🙂
And I assume based on my wiring, and your knowledge of pi, internal pull ups would be fine.
since you've already soldered a wire to the GND pad on the bonnet, i'd stick with using internal pull ups
I tossed in the digital pull ups! Mixing various project code I'm finding to try and make the button work.

Of course this isn't working. So I think I shall move this conversation over to circuit python.
so I can find my USB drive using dmesg, so the pi is aware of it, but it just is choosing not to mount it.
I'm following this guide https://www.sparkfun.com/news/2332 in here they say their device is mounted to /dev/ttyUSB0. I don't see anything like that in my log. Is that because it didn't mount?
silly question, I ran dmesg | less but I can't seem to exit out of the context that brought me to.
pressing random keys brought me to the man page lol
q
h gave me help, is that a common thing?
Enough that I should remember it?
Anyways it was suggested that I look into "udev rules" to solve why this USB drive isn't mounting but I am a little lost. Can you point me further in the right direction?
not really. it's a broad topic.
a board topic?
broad
ahh
OK
Hmm, so basically someone did something to this pi to get it into this state and now it's just borked. I wanted to do some learning about this
Hello, I'm trying to backup my original Xbox's EEPROM using this tool: https://github.com/MarioMasta64/PiPROM but after installing bcm2835 and building and running PiPROM successfully I get this error: bcm2835_init: gpio mmap failed: Cannot allocate memory Failed to initialize bcm!
What does this mean? I've even installed the latest bcm2835 version (1.71) and it still gives the same error.
GitHub
Read/Write an original Xbox EEPROM chip with a Raspberry Pi - GitHub - MarioMasta64/PiPROM: Read/Write an original Xbox EEPROM chip with a Raspberry Pi
seems like a text encoding issue, but thats all i know
What would cause this? On the left (as per Adafruit instructions) I had this screen. Something changed last night and I ended up with the screen on the right, and then lost connection, and had to flash the entire board and start new again. Could it be conflicting code? Like if I used Adafruit circuit python and then tried some GPIzero code?

After a few hours this morning (reflashing and reinstall everything) I have the 'normal (?)' screen on the left again. And all 12 servo ports (didn't solder in the last 4) operate the servo's fine from the PiZero and the 16ch bonnet, with the screen on the left still being what comes up when I check it. So I wonder if I put some crazy conflicting code in when trying to set up a button?
@halcyon relic if you run sudo i2cdetect -y 1 do you see two devices?
yes, theyre alive and at two addresses
0x76 and 0x77
All I need is the bits of code to display them
The screenshot of the code is working and I get values, but just of one
to display both*
then you should just be able to make two adafruit_bme280.Adafruit_BME280_I2C objects, but pass in different addresses. like:
bme1 = adafruit_bme280.Adafruit_BME280_I2C(i2c, address=0x76)
bme2 = adafruit_bme280.Adafruit_BME280_I2C(i2c, address=0x77)
``` and just use `bme1` or `bme2` when referring to them in codenice, it worked
Can anyone help me with NRF24l01 wireless module. I got the code and set up everything there is a little problem with communication. Please let me know if anyone can help me with that
this is from send.py

this is from receive.py
You may see a response from i2cdetect like the image on the right (where all addresses are listed) when there is a physical wiring problem with the I2C bus itself, such as a short circuit, a bad device or one whose power supply is wired incorrectly, SDA/SQL pins swapped, that kind of thing. When something like that happens to me I disconnect all my I2C devices and gradually plug them in (unpowered, not powered) until the culprit is revealed. If you've got a lot of servos hooked up I'd say it's very possibly related to power supply issues.
So in the end, was it that you had two contending devices on the bus?
I have no clue. Things went worse, PUTTY crashed, and I couldn't even log in. So I just took the SD card, flashed it, and started all over. Right now it shows the normal (left) image when I run my tests. Previously I had only added two servos. This morning I added all I have, 7 right now, and it worked fine. I wondered if it was incorrect code from different places (GPIzero, Python, CircuitPython, and who knows) as I tried dozens of things to get the servo to work with a button.
Next time that happens don't just immediately flash the card. Insert it into a laptop or workstation and locate the /var/log/messages or /var/log/syslog files to see what happened. Otherwise it remains a mystery and you haven't learned what went wrong, as you said, you still have no clue.
Oh! I didn't know you could do that!! Thank you!!
Yeah, the Raspberry Pi is a typical, normal, complete Linux computer. Linux computers store pretty much all activity in their logs, including warnings and errors. If your Pi got cut off before it was able to write the log, that'd be unusual. You'd at least see in the log what it was doing as it died.
I'm having a problem with the 3.5 Inch touchscreen display that Adafruit has to offer. When ever I load Octoprint on my pi, the touchscreen doesn't register any input. How do I fix that?
how do i set up my pi to send code to a microcontroller
You mean something like this? https://www.pedalpc.com/blog/program-pic-raspberry-pi/
What are you trying to do? I’m not sure I understand the question.
i want my pi to handle most of my programming and my microcontrollers to handle most of the perifial
Do you want the MCU to be in continuous communication with the Pi or just be able to transfer programs to it as needed?
Also what MCU and are you using Arduino or CIrcuitPython on it?
as needed i thnk. im making a pipboy
im thinking of having the micro switch on when the different sections ar selected to help conserve power
im using feathers, qt pys and metro m4s, so i think its all CP
On the Pi, do you have the full Desktop or are you just using the "lite" command line only version
im not sure, my instructor already installed it. i think he used noobs
it looks like a desk top though
OK - If you connect a USB cable from you Pi to the MCU -- it will mount as a disc drive name CIRCUITPY
You can write code on the Pi with any editor -- the copy the files (drag/drop) to the CIRCUITPY drive. The Mu editor is highly rrecommended. It should be on the Pi already
thing is, im not sure if ill have enough usb slots and id like to end up with a fully wired and soldered setup
This guide may help https://learn.adafruit.com/welcome-to-circuitpython/creating-and-editing-code
You want the MCU permanently wired to the Pi?
If you are short on USB ports -- add a powered USB hub,
I guess I'm still not seeing the "big picture"
im making a pipboy and will have the pi as the central hub controlling everything with break outs being controlled by the microcontrollers. the micros send the relevent info back to the pi so the pi can display it. to allow more to fit i may end up removing the usb all together
Ah -- OK I did not understand that you want them all communicating all the time. Much different problem.
currently i am programming on a feather, but am running out of room so im looking to upgrade. im not looking for them to communicate all the time but, for example, if i have the radio selected, the breakout and the mcu turn on and start running code/talking back to the pi while the mp3 player shuts down. the only things i plan on running constantly is the geiger counter, the screen, and have an option to lock the mp3/radio on
id like to do the lock with a button that is on the selector but i havent gotten to the shell design
I don't have a simple solution in mind...For one MCU you could use a UART connection.. For several, I'm not sure what the best approach might be. Can you just use GPIO pins to send a "signal" to control the MCUs. That is toggle a pin on the MCUs to make it do something. Do you really need to exchange information between them?
kinda. the radeo needs to tell what channel its on, the mp3 player needs to list song info, the map needs to display the map, ect
I hope others can jump in to help with suggestions.
I have connected several breakouts to a single pi. That is not problem, but connecting several MCUs is a different problem...
You may be able to use one of the "bus" protocols (I2C, SPI,Can) but it won't be a simple thing to do.
You would need to set up the Pi as the BUS controller and each MCU as a Peripheral. Usually the MCUs are the Controllers and I'm not sure how (or if) you can run them as Peripherals but it is something to look into.
if i can set it up to where each mcu contrlls just their breakout, then communicate that info to the pi, it should work fine, kinda like what our computers are doing now
i set the selector switch to the enable pin of the mcu and to a gpio on the pi and that tells the pi what is turned on without actually truely connecting. i then set the mcu to send info over data, essuntually using each mcu and breakout as a usb device that is hardlined in. at least thats what im attempting
You can use `pyserial' to set up communication with multiple USB devices.
i am wondering how big a breakout the qt py can handle, because i can fit alot of those in the pipboy, if there are enough pins on it that is
one thing ill need to do is dedicate a usb to outgoing info to another computer, but that should be easy yes?
"easy" is a very subjective term 😉 If I am understanding, I think the answer is yes, but your project sounds very complex to me so I I don't want to make promises...It should be fairly simple to get a Pi to communicate with another computer via USB.
ok, that last part simplifies what i was trying to say. ill be doing a custom connector for it, nut it will function like a usb and communicate with the device its plugged into
a simple usbc to custom port adaptor should make it fairly universal too
I am going to step back and hope other more knowledgable folks will step in to help. I know there are many others who can be far more helpful than I. Good luck!
@glacial gale if I understand correctly, there is a central control program running on the RPi (running Linux), and several microcontrollers?
yes
each microcontroller can use usb_cdc.data (https://learn.adafruit.com/customizing-usb-devices-in-circuitpython/circuitpy-midi-serial#usb-serial-console-repl-and-data-3096590-12) to talk to/from the RPi. Then the central program on the Pi can mediate all that. That is probably a simpler design than having the microcontrollers talk to each other individually.
Each micrcontroller would have its own /dev/ttyACMnn port
They were not going to talk to each other, just the pi, though it may not matter, still may be complecated
@humble marsh Thanks for stepping in. I knew I was forgetting something!
Here is an example of using usb_cdc.data to send data to a host computer. It's using json: you may not need that -- you could make up your own ad hoc serial protocol. This example only sends data up to the host: you'll want to receive data too https://learn.adafruit.com/diy-trinkey-no-solder-air-quality-monitor
Hi guys! I'm new the raspberry pi world. I have a raspberry pi zero w. I am planning on using this hat https://www.adafruit.com/product/2345 to control an rgb matrix. I also want to install a powerbutton I was planning on following this tutorial https://www.youtube.com/watch?v=wVnMZ4DXDNo&ab_channel=Howchoo Im not sure how to do that when the gpio pins will be taken up by the hat. I have extensive coding knowledge but when it comes to hardware I have no idea what I am doing. If anyone can help/point me to resources that will help me understand that would be very much appreciated

You can now create a dazzling display with your Raspberry Pi Model Zero/A+/B+/Pi 2/3/ or Pi 4 with the Adafruit RGB Matrix HAT. This HAT plugs into your Pi and makes it super easy to control ...

In this video, I'll teach you how to build your own Raspberry Pi power button, allowing you to shut your Pi down safely! I'll also show you how to install it in a FLIRC (or other Raspberry Pi) case. This will work with any Raspberry Pi model (Raspberry Pi 4, 3, Zero, etc.)
● View the full text/photo guide on howchoo:
https://howchoo.io/raspb...
@somber yacht There's a row of labeled holes below the header on that board, the labels being the GPIO numbers. GPIO3 isn't one of them, but I don't think there's anything magic about that pin, as long as you change the code to match. Ground and power holes are below that -- you should just need one of the ground holes.
So you can wire the button between say GPIO5 on that top row and one of the ground pins right below it
@olive haven Thanks, i probably should have done a little bit more research before posting this! I thought shorting those pins was something built into the operating system/board to power on and off. Kind of like the power pins on a desktop motherboard. I looked into how the program works and your right. I can just switch to a pin thats not being used!
I think 3's a popular choice for this kind of thing because it's right opposite a ground pin on the header.
It also has a special wake functionality
So a Mom-On switch used there will shutdown and wake the pi
Running into an issue with some test code I wrote that worked earlier but now is throwing errors when I swap the SD card to another pi.
Code is
def setup():
GPIO.setmode(GPIO.BCM)
for i in range(2,27):
GPIO.setup(i, GPIO.OUT)
Error is:
/home/pi/testing.py:8: RunTimeWarning This channel already in use....
GPIO.setup(i, GPIO.OUT)
I didn't think that when coming from a cold start that any gpio would be in use.
Get that error when I run
import testing as t
t.setup()
you can ignore it, its a warning. if you want to disable warnings use
GPIO.setwarnings(False)
I saw that but I don't like to ignore warnings unless I have a deep understanding as to what they mean
Hello, I need some help to get an output to an lcd with data coming from InfluxDB.
I have two sensors that feed a database. Grafana gets the data from there and I can watch it on my PC. I want to add a lcd so that I can also view the data without having to log into an PC.
I use a raspberry pi zero 2, two Adafruit BME280 and a Sparkfun SerLCd. Ask necessary drivers etc. are installed.
The code to read it the sensors works fine on it's own.
The sample code for the lcd works fine on it's own.
I can't code, my rough thinking was I can somehow merge these two codes, but that didn't work of course.
I'd appreciate it if anybody could guide me in the right direction on how and what code I need to embed into my sensor code to get it to display the data.
I uploaded the code here: https://gist.github.com/overcast7/bcb8bcff9e7e84f5dfaa6970c7ff7ed8

Gist
Adding code to feed an SerLCD with data from an influxDB - developer_sample_serlcd
The basic thing is that since you don't have to do it all in a single program. You can run the sensors_to_influx.py as is, and write another program say influx_to_lcd.py that reads data from the database and displays it.
You can run the sensors_to_influx.py (or any other raspi program) in the background from the command line
python3 sensors_to_influx.py &. It'll print out something like [1] 20614 and then give you a command prompt. The [1] indicates that you can foreground the program by typing %1 at the command line.
(the 20614 is the OS process number for the program.)
I'd be okay with that too, but my code-knowledge on how to grab the data from InfluxDB and put it on the lcd is too limited unfortunately
Divide and conquer: do you know how to get data from InfluxDB?
I don't know that a particular DB, but I would think that the InfluxDBClient class contains methods to read data as well as to write it (as your code does with client.write_points)
What version of InfluxDB are you using?
I'm not at the pi at the moment, I recall 1.6
But with your idea I found some good results online (keyword: querying) that I'll try in the evening
So, if i understand correctly, id set up buttons as shortcuts that would run code in a way similarly to repl
I was just showing that example to show how to send data back to the host. The buttons were not so much the point: it's the use of usb_cdc.data.
btw, we have fixed the "b" problem in open(): https://github.com/adafruit/circuitpython/pull/5896 https://github.com/adafruit/circuitpython/issues/5895
So it will report the issue now? Or does it not register as an error at all so the script continues as normal?
it will report it as an error (which is what regular Python does).
kk
Hey @humble marsh could you have a look at the code from two days ago for me? Im a bit proud that I now got three sensors working, but I have troubles figuring out the json_body fields
sure, upload it
I saw that I had a SHTC3 laying around that I could use because its on address 0x70.
I then also used the adafruit drivers (in the old script it was a unoffical driver)
Bare with me, its not pretty. I just tinkered and got it working....
Line 44 is to stop it from flooding my Thonny
And well, the name fields I just added to see if I get all sensors in the output (with only the raw values it was impossible for me to check) I used this because I couldnt use (data.id) like before, since I didnt know how to address data
And because date = referred to code from the github BMW280 driver (which I no longer use)
So what I uploaded works and I get to display it in Grafana, but only one sensor of course since I got stuck
Hello, good morning/evening, I wanted to know if there is any way to boot the raspberry pi pico as autorun, thanks
Good morning, I have found a new revision code c03115 which is causing me issues with trying to get neopixels to run. Could someone please open a PR for the relevant libraries? Thank you 😊
You can create a service which runs on boot. See https://www.raspberrypi.com/documentation/computers/using_linux.html#the-systemd-daemon. Or you can use cron to schedule a task on reboot: https://www.raspberrypi.com/documentation/computers/using_linux.html#running-a-task-on-reboot
Sorry, I see you asked about the Pico. Pico isn't a Raspberry Pi in the sense of a small computer that runs an operating system like Raspberry Pi OS. (This discussion group is about those computers and operating system.) The Pico is a microcontroller board that will run whatever software is loaded into its flash, like an Arduino sketch, or a Python interpreter like CircuitPython or MicroPython. Either of those Pythons have a way of specifying what Python code to run on boot.
I would ask in #help-with-arduino or #help-with-circuitpython wrt RP2040 boot automagic. ;)
Since it'd be hard to not autorun in Arduino sounds like a python question. I don't remember the deal on that.
@real cipher Earle Philhower's implementation for Arduino is usually a good choice for RP2040.
there's also an arduino.cc implementation, which is based partly on mbed ideas/code.
The cmake driven pico-sdk is another choice.
Plus at least two python implementations.
Like any other C/C++ program:
Hi! I'm not sure what is the best place to ask this, but I'm having issues with a LSM9DS1 module, specifically with mki159v1, which isn't adafruit's, but is pretty similar. I'm not able to get it communicating via I2C to a Jetson Nano. i2cdetect detects the module on bus 1, on adress 6a and 6b. But I'm getting the error No I2C device at address: 0x1e, and looking around in the adafruit_lsm9ds1 library, I'm guessing that I'm also supposed to get a device detection at locations: 0x1c and 0x1e(for the magnetometer, perhaps?), which I'm not. Have I missed something? Currently, there are 4 pins connected to the module: Power Supply and Ground, and SDA, SCK for I2C. Am I doing something wrong?
@soft sierra the i2c bus operates Open Drain.
That means you must use pullups or it won't work at all.
I don't see any pull-up on the schematic https://www.mouser.com/datasheet/2/389/steval-mki159v1-1848591.pdf
I didn't see any mentions of this in the documentations I've been reading, with either the breakout, or the IMU
Can you direct me to some article related to this?
I take your word on it that it's i2c. The i2c bus is as I've described it.
It's kind of a deep knowledge thing; I have no clear idea where you can validate my assertion.
Some computer boards (Raspberry Pi) have I2C pullups installed on the board, but most Microcontrollers do not so eitehr they are on the sensor board or have to be added.
I don't know if the Jetson has them.
it definitely is i2c, with which I have next to none experience, causing this confusion
thanks a ton!
If you add a second set of pullups (one set is hidden from your knowledge for any number of reasons) it'll probably still work okay.
it doesn't, I'll have toadd it externally
Once you add the pullups, and try it with and without them, you'll get a feel for it.
10K is usually a good value for an I2C pull-up
okay, thanks!
One thing that still confuses me though, is why am I getting some detection(accelerometer and gyroscope) on the right addresses(6a 6b)? If it shouldn't work, I shouldn't be getting any result, right?
First guess is your firmware isn't error-detecting as certainly as it could.
Since the pullup is required, and you dont have it, the first thing to do is to have it. ;)
There's no point in asking questions about forks that you will not be traveling through. ;)
true, alright, I'll get that done and let you know if it works out. Thanks for the help @faint sparrow @ruby night
;)
Good luck!
Getting a home-brew radio receiver working that first time is really hard; repairing it when it fails is comparatively easier. ;)
So get it working, then you are in the position to ask supplemental questions.
okay, there's progress! I'm now getting one of the two addresses that I wasn't getting(0x1c). Although the error is still the same. And it turns out, I wasn't reading the data sheet of the module as thoroughly as I thought I was. It did mention that I needed to pull out both the pins, which somehow went above my head.
@soft sierra The Wikipedia article https://en.wikipedia.org/wiki/I²C is a good reference.
can you read analog sensors with the proper HAT if so which ones?
and is it even a good idea with a mini-computer like the pi?
I can't recommend a specific one, but an "ADC hat" is probably what you're looking for. Whether it's a good idea depends on the scope of the problem you're trying to solve. If you are reading a sensor and lighting up a LED in response, it's probably overkill. If you're reading a sensor and using it to automatically adjust the weather in a Minecraft server running on the Pi, that's much more reasonable, heh heh.
I'm questionning wheter arduino and other microcontroller are obsolete now that most good sensors seems to be digital IC2
not sure why i'd even need analog anymore unless I'm using very cheap throwaway beginner sensors
when basically most chips will use analog inside and throw digital data
except for the real-time stuff I see the need for a microcontroller vs a pi less and less as time pass
and even for real-time good sensors have a readings history in them
it seems unless you are doing ham or audio you don't really need analog
It's all a sliding scale of features versus cost and power consumption. There's a whole spectrum of chips from 8-bit MCUs up to GHz MCUs and into embedded CPUs. Nothing's really going obsolete, just optimized for different purposes.
While many sensors have, in fact, come with more digital interfaces today, there are still a slew of applications where having an ADC onboard is far more cost-efficient than designing with the digital ICs.
I can also say from personal experience that using an ADC is far more robust of a system than relying on everything I2C/SPI...
If not for the efforts of manufacturers like Adafruit or Raspberry Foundation making these digital interfaces so much more accessible, we might still be restricted to analog sensors for a lot of personal development, even today.
Is this the wrong place to get help with RP2040?
Kind of. What language are you using it with?
I think we've been kinda loose about it, since it technically has Raspberry Pi in the name, but this channel is usually browsed by people more familiar with the single-board computer type of Pi.
This is more for Raspberry Pi single board computers.
You usually find better help with those in the software help channels or the project help channels, where Arduinos and other microcontroller projects are more common.
Well I tried with python because setup was so easy but really wanted to use C, and I'm wondering what people's thoughts are on using the unofficial Arduino support because I can't for the life of me get it to run C based on the official documentation, particularly on a Windows machine.
TY Hem. I'm new here. Can you suggest a specific channel based on my above statement?
Welcome! I would suggest #help-with-projects.
And we use the Philhower Pico Arduino core. It's pretty solid at this point.
I'm in the middle of adding usage to all of the RP2040 guides, as it happens.
Oh cool! Can you point me to any of the docs you are working on, or a preview of they are not yet live? Pretty new to all this but I've found the Arduino tooling surprisingly awesome and intuitive.
@stuck quarry What RP2040 board are you using?
Depending on which board, I can point you to a guide for a different board which obviously wouldn't be specific to your board, but it's easy enough to figure out what to do based on the info. However, if I've already done it for your board, even easier.
Feather RP2040 because it's a really cool board and I happened to get two of them free with Adafruit orders during the promotions.
OK, I haven't completed Feather yet. Let me get you a link to another guide.
Ok thank you so much!
It will be the same process, but pick Feather RP2040 instead from the menus.
I don't have a lot of Arduino experience, so you're lucky to have caught me in the middle of something I actually have an answer for 😄
I certainly do feel lucky!
@stuck quarry The ItsyBitsy is actually a good example, because the standard I2C pins are WIRE1 on the Feather as well, versus WIRE. The STEMMA QT connector on the Feather is WIRE. It's a bit of a gotcha compared to other Arduino boards. Anyway, good luck! Ask any further questions in #help-with-projects or #help-with-arduino.
And you only need to post in one channel. 🙂 Folks who are able to respond will see it.
As far as I know, all the RP2040 sdk ports leverage the pico-sdk so in that sense they're 'wrappers' to the factory supported SDK.
That means all the cool stuff is available.
Most follks will go Earle Philhower and call it a day, unless python is wanted.
Thank you so much!
bit of an RPi newbie here, which pin is board.D5?
And where can I find a list of all of the boards
*pins
My code:
import adafruit_max31855
from digitalio import DigitalInOut
import board
spi = board.SPI()
#this declares which of the pins are used to enable the chip
cs = DigitalInOut(board.D5)
sensor = adafruit_max31855.MAX31855(spi, cs)
print(sensor.temperature)
However I think that this is working because the Chip Select on my device is low/not connected. Which pin would board.D5 end up being?
The comprehensive add-on boards & GPIO Pinout guide for the Raspberry Pi
D5 refers to GPIO 5
there are lots of pin numbering conventions for the Pi so be careful
Okay so changing to D8 should use GPIO8?
yes
thanks!
You're welcome
Running into strange behavior. When I run my GPIO setup method:
def setup():
GPIO.setmode(GPIO.BCM)
for i in range(2,27):
GPIO.setup(i, GPIO.OUT)
And then run
for i in range(2,27):
print(i, GPIO.input(i))
I get all 0s as expected except for two pins: 7 and 8, those show as 1
anyone have any clues?
Here GPIO is RPi.GPIO
@civic rune floating input issue
What do you mean?
need to enable internal pull up/down resistors
depending on what is wired and how to the pins
also, you configured for output
I intended to configure for output. The second bit of code is the only way I know to get the state of a pin
I assumed when you configured the pins as outputs they would default low
Can anyone tell me where to find the physical dimensions on the Adafruit MacroPad RP2040? Sorry if wrong forum for this question.
Thanks. No idea why it didn't load the details on the product page when I went there before...
for height of the whole enclosure I'm not sure how to evaluate that
no worries, I'm considering using it as part of a guitar build, so the guitar is going to be the enclosure and it'll act like a midi controller.
again, thanks for the links.
oh interesting idea
Hi, I have a display that I just write code for to get it to display temperature and humidity readings. It works, but it shows way too much decimals. How can I tell it to only show one, like 40.1°C? Currently I have:
lcd.setCursor(0, 0)
lcd.print(f"T:{temperature_celsius} C RH:{humidity} %")
lcd.setCursor(0, 1)
lcd.print(f"P:{pressure_hpa} hPa ")
looks like you're using f-strings:
https://docs.python.org/3/tutorial/inputoutput.html#formatted-string-literals
add a : and then use format spec:
https://docs.python.org/3/library/string.html#formatspec
>>> import math
>>> math.pi
3.141592653589793
>>> print(math.pi)
3.141592653589793
>>> print(f"pi = {math.pi}")
pi = 3.141592653589793
>>> print(f"pi = {math.pi:5.3f}")
pi = 3.142
>>>
Thats what I googled too, but I figured it out by:
data.temperature = round(data.temperature, 1)
data.humidity = round(data.humidity, 1)
lcd.setCursor(0, 0)
lcd.print(f"T:{temperature_celsius} C RH:{humidity} %")
lcd.setCursor(0, 1)
lcd.print(f"P:{pressure_hpa} hPa ")
😃

What libeary do you use for that?
You mean language?
You need a "driver", something like this:
https://github.com/sparkfun/Qwiic_SerLCD_Py

GitHub
Python module for I2C control of the SparkFun Qwiic Serial LCDs - GitHub - sparkfun/Qwiic_SerLCD_Py: Python module for I2C control of the SparkFun Qwiic Serial LCDs
Then you can create a file "example.py" and open it with something like Thonny. There you can write the code and hit play
Low distortion, no fisheye, lenses that can do 90 degrees. Anyone have any ideas?
In a weird coincidence, I was at an optics trade show this week, and one booth had a flyer specifically about their low-distortion lenses: https://sunex.com/2019/11/22/tailored-distortion-distortion-correction-at-speed-of-light/
Well that’s convenient , thanks!
hello, ive been wanting to try out the pi pico with circuit python. but i never understood the pins
like do we just connect any jumper cable to any GPIO and it works the same
or is there like more detailed stuff
is there like a tutorial or a webpage that teaches the different pins
and their functions
thank you :)
You're welcome. For any microcontroller it's also good to locate a graphical version of its pinout, very handy...

The reason each pin has the different colored options is that most pins can be configured for different purposes, via software.
so lets say i have an led
can i plug that into any GPIO and GND pin?
sorry if im asking like really nooby questions
im just really new to the pico and a curious person by nature
Yes, you can connect an LED (in series with a suitably-sized resistor) between a GPIO pin and ground, noting that the maximum current of all the GPIO pins must be less than 50mA, as according to the FAQ: https://datasheets.raspberrypi.com/pico/raspberry-pi-pico-faq.pdf
I'm not sure what the maximum current is per pin, but on the Raspberry Pi it's 16mA, so you need to choose LEDs that don't consume more than around that limit. GPIO pins in output mode are generally meant as signal rather than power drivers, but LEDs are (generally) pretty low current devices.
Thanks - looks like that to me, as well. Not sure how to fix it. I just changed themes for now. Definitely not a show stopper.
Hey guys, i have a small class I created to control a furance. I am just turning a relay on and off that controls my furnace. I wrote the status method to check if it is currently on. However I feel like I should actually check the status of LED(17). Is that possible? Incase it somehow was left on from an old program or something of the sorts. Since it is a furnace I want to be sure.
class furnace:
def __init__(self):
self.relayOutput = LED(17)
self.relayOutput.off()
self.enabled = False
def enable(self):
self.relayOutput.on()
self.enabled = True
def disable(self):
self.relayOutput.off()
self.enabled = False
def status(self):
if self.enabled == True:
return True
else:
return False```I mean you set the status explicitly in init, no? Seems fine
I'm no expert. I've been writing Python for a few years but no expert. I think you're ok
btw you can rewrite you status func as so:
def status(self):
return self.enabled
because self.enabled is already a boolean
and if you want to make sure it's exactly True, not just truthy, use if self.enabled is True
I prefer explicit checks because of how soft typing is in Python.
But that's just me
Trying to make Python C
And rhyming by mistake
If you never assign to self.enabled anything but a boolean, you're fine, and for small projects it's probably never a concern.
in later versions of python (3.9 i'm pretty sure) you can add types to your functions:
def status(self) -> bool:
return self.enabled
and you can also add them to parameters as well
you can also do it to variables as well i'm pretty sure but then it gets ugly
like
self.enabled: bool = False
Interesting
Note that the type annotations are just "hints" that can be checked by separate tools, not enforced by Python at run-time.
Yeah that's what I thought
If you want strict typing, you should use a different language
But it's incredibly useful documentation, hints tool or no
True
You can do it in CP -- it seems like the parser implementation is that it allows, but ignores, the ": blah" and "-> blah" stuff
It seems the CP folks are gradually adding type hints all over the place
Looking for some wisdom and opinions. For a vehicle install of a power management/monitoring system, why would I use an RP2040 Pico or similar instead of a Raspberry Pi Zero 2 W? Power draw? Better sleep performance/power usage? Can someone explain?
The power draw would definitely be one angle. The Pico has ADC inputs, if you need those, and is generally going to be more adept with low-level digital interfaces, PWM timers, etc... anything more real-time focused.
So, it would be better at UART serial connections for RS485/232?
Or, is that still comparable to the Zero 2 W?
UARTs are common enough that the Zero would also be fine at that, but the Pico has a more flexible I/O system for more unusual things like, say, Neopixels.
All this guy would need to do is communicate with some modbus things, collect some stats from sensors, and run a display in the cab of my truck.
The main reason to use a Zero would be for the wireless, or for access to the more flexible software resources you get with a full Linux environment and a CPU with plenty of memory and processor power.
And turn on/off some FETs.
The display would also be a reason to go with the Zero, if it's something like a complex graphical interface on a HDMI screen, etc.
Yeah, that's what I was going for. I have this suuuuuper-wide TFT that I was going to build a cyberdeck out of my 400 with, but I am thinking, it's narrow enough to fit perfectly to be mounted on my dash.
That's going to be a better choice, then. The Pico is pretty RAM-limited, so the type of displays it can deal with comfortably is also limited.
That I'm not sure of offhand. It would certainly have some sleep modes, but precisely what can wake it from different levels is outside my expertise.
Totally cool, I will do some research on those bits! Thank you for being here and providing assistance. I truly appreciate all of you.
I came to this discussion a bit late, but I'm guessing you're both aware that you can do explicit type checks:
if isinstance(arg, MyClass):
self._arg = arg
else:
raise TypeError('expected MyClass, not {}'.format(type(arg)))
Whenever I'm not entirely sure the right argument might get passed I add a type check, or when I'm permitting different classes of arguments I'll handle them according to the check.
Hello, real VNC is not connecting even though i can ping the pi. i'm getting:
Timed out waiting for a response from the computer
anyone else had this problem? it's been a while since i used VNC, but i've never had a problem before.
yes
when connected via SSH and i enter:
vncserver :1
i get:
Error: A VNC or X Server is already running as :1 [DisplayInUse]
i'm using the recommended client on windows
one variant- my ethernet cable is plugged directly from my computer to the pi. my understanding is that there's really no problem with this- newer adapters manage crossover and IP address negotiation, and again, i can ping and SSH
I had that happen to two of my Pi's, and I had to delete them from the Windows VNC client and re-enter them. Worked fine after that.
weird... this is the first time using, and i don't realy know how i'd 'delete' them- it's just an IP address in the address bar- no address book or anything
realvnc troubleshooting page states:
"Check the remote computer is switched on. Ensure antivirus software lists VNC Server as an exception, and the firewall is configured to allow access on VNC Server’s listening port (5900 by default)."
i'm using "Raspbian GNU/Linux 11 (bullseye)" which i don't know if it automatically runs a firewall or antivirus
fyi got it- rebooting cleared the error, and then i got a message stating the ip address of the desktop, but specifying the port number, which was not 5900 as implied by the error note above, but i was able to simply add the port number to the IP address in the vnc viewer and it worked
I am working with the AHT20 temp and humidity sensor. The example code on adafruit site uses “board” library. When I run the example code , I get an error for I2C. So I went to REPL I imported board and did the dir(board) . The I2C wasn’t in the list.
You mean you get an error when you run
var = board.I2C()?
Yes
Hm
I mean you can always do the other way of setting up I2C
Let me see if I can find it
Was there a board.SCL and a board.SDA?
What is board.board_id?
SPDX-FileCopyrightText: 2021 ladyada for Adafruit Industries
SPDX-License-Identifier: MIT
"""
Basic AHTx0 example test
"""
import time
import board
import adafruit_ahtx0
Create sensor object, communicating over the board's default I2C bus
i2c = board.I2C() # uses board.SCL and board.SDA
sensor = adafruit_ahtx0.AHTx0(i2c)
while True:
print("\nTemperature: %0.1f C" % sensor.temperature)
print("Humidity: %0.1f %%" % sensor.relative_humidity)
time.sleep(2)
That is what I’m using on a PI zero
I’m not at my computer to answer questions right now
I will try this when I get home
I just set up Blinka on a Pi Zero W, following the instructions at https://learn.adafruit.com/circuitpython-on-raspberrypi-linux/installing-circuitpython-on-raspberry-pi. When I import board, dir(board) shows I2C in the list.
>>> import board
>>> dir(board)
['CE0', 'CE1', 'D0', 'D1', 'D10', 'D11', 'D12', 'D13', 'D14', 'D15', 'D16', 'D17', 'D18', 'D19', 'D2', 'D20', 'D21', 'D22', 'D23', 'D24', 'D25', 'D26', 'D27', 'D3', 'D4', 'D5', 'D6', 'D7', 'D8', 'D9', 'I2C', 'MISO', 'MISO_1', 'MOSI', 'MOSI_1', 'RX', 'RXD', 'SCK', 'SCK_1', 'SCL', 'SCLK', 'SCLK_1', 'SDA', 'SPI', 'TX', 'TXD', '__blinka__', '__builtins__', '__cached__', '__doc__', '__file__', '__loader__', '__name__', '__package__', '__repo__', '__spec__', '__version__', 'ap_board', 'board_id', 'detector', 'pin', 'sys']
>>> board.board_id
'RASPBERRY_PI_ZERO_W'
Hmm, I will double check and share what I find.
Python 3?
yes
Ok
It's best not to use Python 2 for anything unless you absolutely have to. It's "legacy code", as the euphemism has it.
Hey all. I am trying to get the https://www.adafruit.com/product/4741 working on my raspberry pi 4. I followed the tutorial at https://learn.adafruit.com/circuitpython-on-raspberrypi-linux/installing-circuitpython-on-raspberry-pi first then the tutorial on the display itself. When I run the sample code at https://learn.adafruit.com/adafruit-grayscale-1-5-128x128-oled-display/circuitpython-wiring-and-usage I get the following error message about displayio:
This OLED goes out to all the fans who want more pixels! Normally our 128x64 OLEDs are the biggest ones we've stocked that can use I2C. This one is a whopping 128x128 pixels and it even ...

Adafruit Learning System
Make hardware and interface with sensors super easy using CircuitPython

Adafruit Learning System
This cute little OLED is twice the size of out 128x64 OLED, plus it can do shades of grey.

I spent a while looking into it and from what i understand displayio is supported on the pi 4. Not sure what to do next. Thanks.
Python 3.7.3 (default, Jan 22 2021, 20:04:44)
[GCC 8.3.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
import board
dir(board)
['BaseDimension', 'Board', 'Dimension', 'Empty', 'Image', 'InfiniteDimension', 'Infinity', '_Empty', '_InfiniteDimension', '_Infinity', 'builtins', 'cached', 'doc', 'file', 'loader', 'name', 'package', 'spec', '_centred_coord', 'cornerposts', 'functools', 'imagefile_sprite', 'io', 'itertools', 'long', 'os', 'sys', 'text_sprite']
board.board_id
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
AttributeError: module 'board' has no attribute 'board_id'
I don't know what that's from -- before I installed the Blinka/CircuitPython stuff, 'import board' found no 'board' module -- but it's not anything that the Blinka installation would have set up.

How do install what I need?
Idk if you need to uninstall the board you installed first, I would
But one sec, let me get you the link
https://learn.adafruit.com/circuitpython-on-raspberrypi-linux/installing-circuitpython-on-raspberry-pi @static sparrow
Adafruit Learning System
Make hardware and interface with sensors super easy using CircuitPython
why do i always end up on the CIRCUITPY drive when i unplug my raspberry and plug it back in
Theoretically you can install it with pip. (See https://pypi.org/project/adafruit-blinka-displayio/.) I tried that, and though the install succeeded, I got an error trying to import it in Python:
>>> import displayio
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "/usr/local/lib/python3.9/dist-packages/displayio/__init__.py", line 23, in <module>
from ._bitmap import Bitmap
File "/usr/local/lib/python3.9/dist-packages/displayio/_bitmap.py", line 23, in <module>
from PIL import Image
File "/usr/local/lib/python3.9/dist-packages/PIL/Image.py", line 89, in <module>
from . import _imaging as core
ImportError: libopenjp2.so.7: cannot open shared object file: No such file or directory
I tried sudo apt install libopenjp2-7, which succeeded, but then I got a different error. FWIW the adafruit-blinka-displayio version is 0.8.0, so maybe not ready for prime time?
Has anyone run two scripts on a single raspberry PI with paho MQTT. When the second script starts. they seem to both have connection issues, but independently they can both run.
I have both scripts working independently but still having client issues
If some one help me with my raspberry pi problem I pay him :0
What do you need help with?
Hi, I'm stuck with the installation of .net 5 on my raspberry pi, it notes that it has been installed but whenever I ran 'dotnet' it said segmentation fault, anyone know what the issue could be?
hey guys, i used to have a small handheld fan. i have lost it's controlling board. now i have the fan itself which has 2 wires now coming out of it. can i use Pico to make it function?
Do you have a product number for the fan?
it just has a series number
it says input voltage should be 5 volts
Might be a PWM controlled fan, I don't think you can just use a pico
would anyone in this channel know what's going on here? link to post in #help-with-circuitpython #help-with-circuitpython message
Hey all so I recently updated one of my Raspberry Pi 4B's with the rpi-update and now it won't boot. I think it's the new firmware that was installed. I have reflashed the latest image and it still won't boot. What can I do?
May or may not help - had a pi 4 that worked..then one day didn't... reflashed the card a bunch of times and still didn't and gave up... a year later I tried a different card and it worked.
You probably can just try a new card without waiting a year 😉
I could try, but the card that made it not work works in my other RPi 4. Also, does anyone know if NetPi Plus works on the RPi4?
Hi there I'm making a rotary encoder to operate my commands on software but I need to use the keyboard hid coding.
I've been able to code it fine but when I turn the rotary encoder it sometimes goes back on the numbers.
For example 1,2,3,2,3,4,5,4,3.
Something like that. Any ideas
Could be mechanical bouncing on some edges, or turning the encoder faster than the edges are scanned?
I think it is mechanical as I'm going slow is there away to stop this in the coding
anyone else have any ideas
If it's switch bouncing, the usual approach is a "debouncing" algorithm in software, which is often as simple as waiting a few milliseconds for the value to stabilize before reporting it as real.
What are the modules of choice for using gpio/spi/i2c in python?
how do i get around it debouncing is not a part of coding im used to

had a look and it doesn't have an example for HID
i cant get my pi to connect to the internet and my instructor cant figure it out. can someone help?
Hey Guys, Im having a strange issue. I have always connected to a DB at the start, then querried as needed. However for some reason if I have my database connection outside my loop I am not reading in the latest data. If the connection is inside the main loop it works fine. However I dont feel like I should be creating a new connection every query.
import mariadb
import sys
from datetime import datetime, timedelta
Database Script
class furnaceDB:
def __init__(self, db):
self.conn = mariadb.connect(
user="pi",
password="Skylar2305!",
host="localhost",
port=3306,
database=db
)
self.cur=self.conn.cursor()
print("Sucessfully Connect To Database")
def readSensor(self,sensor, datetime):
sql = ("""SELECT * FROM garage WHERE sensor = %s AND time > %s""")
data = (sensor,datetime)
self.cur.execute(sql, data)
results = self.cur.fetchall()
return results
Control Script
while True:
currentTime = datetime.now()
windowTime = timedelta(minutes = 5)
checkTime = currentTime - windowTime
#Connect To Database
database = furnaceDB("furnace") #@@@ This is the spot that If I move outside the Loop I get old data
setpoint = database.readSetpoint()
results = database.readSensor("garage1", checkTime)
if len(results) == 5 or len(results) == 4: # Make sure we read 4 or 5 datapoints at least
tempBuffer = 0.0
for result in results:
tempBuffer = result[1] + tempBuffer
avgTemp = tempBuffer/len(results)
shutdownError = False
print(f"Setpoint: {setpoint} 5 Min Temp: {avgTemp}, Read Time {currentTime}")
else:
shutdownError = True
print(f"Incorrect Amount Of Datapoints Available. Setpoints Read: {len(results)}")
if shutdownError == False:
if avgTemp < setpoint:
print(f"Turning On Furnace")
client.publish("garage/furnace1/control", "True")
sleep(60)
You may need to connect directly to your router with an ethernet cable to set it up.
i fixed it. thanks 🙂
What was the solution?
Turn off my pc
Is there anything special about GPIO 7 such that it would be output-high on boot?
I believe GPIO 0-8 have pullups enabled by default, so I wouldn't be surprised if those pins all had output-high on boot.
Hmmm.

I'm unclear on the circuitry of this system, and I'm disinclined to sort it out since it's all being replaced, but I'm only seeing a "high" state on the circuit connected to GPIO 7
Hey can I connect my Xbox controller to my pi
Yes. you can.

Howchoo
This guide covers the process of connecting different Xbox controllers to a Pi. Wired and wireless Xbox 360 and Xbox One controllers work with the Raspberry Pi.
Kk thx
So snool problem
Hi There, I just bought the AIY Vision kit from Google on Adafruit and can't wait to start my project. I wonder if anyone has any ideas that could help me. I have never done any computer vision or AI before, but this goal seems achievable. I want to write a python program that will take a baseline picture of my kids' bedroom from above with a clean floor, the continuously watch it and calculate the % messy by presumably subtracting the original background image from the camera image and then calculating the % of the image that is left. I will have a button to "rebaseline" and will use a servo to create an oldschool analog dial to show % messy. Any ideas on the python vision code? similar example links?
Hello, I'm using PI4 with circuitpython bare metal port. I have connected an HDMI display but can't see any anything on display. Is the REPL visible on USB or HDMI?
The go-to for vision tasks like that would probably be the OpenCV library. It has Python bindings too.
Thank you. That is what I am finding online too. Others have also suggested Yolov5
My instinct would be to stick with more basic computer-vision operations rather than a full AI model for the problem as you've described it. The latter would generally require you to collect a big dataset to teach the AI what clean and messy rooms look like. "Okay, here's a photo of the kid's room at 13% messiness. Here's one at 28% messiness..."
anyone has experience with Pi 4 and bare metal python?
afaik you connect up to TX/RX pair on the RPi4 pin headers.
Just looked. It's only for debugging after modifying C source so not normal use.
Normal use on RPi4 is the USB-C cable connection.
Hi, I have a problem with my Raspberry Pi Pico. I downloaded CircuitPython for the first time and everything worked fine until I reconnected it. I only had one file there and the others don't show up. I tried to reinstall CircuitPython, but I still only have boot-out.txt and the lib folder and others do not appear. Does anyone know how to fix this? Thanks!
@solar phoenix it may not a problem, you can load a code.py . But safest is to nuke the flash, then reload Circuitpython and your other files.
bottom of this page: https://learn.adafruit.com/adafruit-feather-rp2040-pico/circuitpython
(CircuitPython questions will get more traction in #help-with-circuitpython )
are you using bare metal or with linux?
Without linux
I'm too using without linux but i cant see anything on my HDMI
did you edit boot.py?
I only downloaded the CircuitPython on it, put adafruit hid in the lib folder and putted payload on it. After that it was working fine and like 10 mins later this happend.
did you download .zip file from downloads page? or you used .img file?
i used the zip
i think there was a similar issue in its repo issues
Okay thanks, i manage to nuke it and its working now
Is it bad to nuke the raspberry pi pico often?
You won't be able to wear out the QSPI flashROM chip.
You'll lose it in a pile in the attic, damage it by overcurrent through Vcc/GND or something else way before you'll use the last cycle of the QSPI flashROM' s lifespan. ;)
Raspberry Pi Pico is not the same as Raspberry Pi SBC's (like Pi 4)
just fyi, seems like two different issues
That is exactly what I want to avoid
can i run the pico by connecting the usb to a power brick or a battery pack?
It wants up to 1.6 Amps during startup.
After that about 800 mA maybe.
Might spike up to about 1.3 A occasionally.
I believe this is the Pico, not a Zero.
Yes.
KD3005D from Korad
(https://www.sra-solder.com/korad-kd3005d-precision-variable-adjustable-30v-5a-dc-linear-power-supply-digital-regulated-lab-grade)
Setup to current-limit an RPi4. That was my thought. ;)
The RPi4 would boot reliably somewhere north of 1250 mA iirc.
Then settle down to 800 mA.
An RP2040 board would draw far less.
Some USB battery packs will turn off if not enough current is being drawn. There's a dongle for that. Or find one that doesn't.
Figure 35 mA for the average target board at quiescence (idling in a while(-1);).
Okay, thanks:)
I am trying to make a clock with my Raspberry Pi Pico and i2c display. Can anyone help me code it? (python or circuit python)
https://learn.adafruit.com/circuitpython-display-support-using-displayio/text might be a good place to start. What exactly are you stuck on?

Adafruit Learning System
User friendly guide to CircuitPython's native display library - displayio.
I really am just clueless with micropython and circuitpython. this project is due tommrow and Im freaking out
@turbid rivet
Step one would be to get some example code running on your hardware, just to make sure your wiring is sane and you understand the general flow to get code onto it. Then some example code specifically for your display, to make sure that part works. Then you can start to figure out what functions you need to create a clock, which could be simple ("12:00" text) or complex (animated analog clock face), etc.
I'd start by trying to draw lines and circles
can I see some sample code of writing text
You mean like the tutorial that @turbid rivet linked a couple of messages up? 😉
I have a feeling Im gonna need lots of help 😭
@umbral sable the pi pico does not have a onboard screen. So I purchased an i2c screen. So the example code wont work
Do you have some different example code targeting that screen model?
no I do not, heres the i2c I bought https://www.amazon.com/dp/B019K5X53O?ref=ppx_yo2_dt_b_product_details&th=1

Introduction As we all know, though LCD and some other displays greatly enrich the man-machine interaction, they share a common weakness. When they are connected to a controller, multiple IOs will be occupied of the controller which has no so many outer ports. Also it restricts other functions of...
Possibly a tutorial like this would be compatible with it. https://lastminuteengineers.com/i2c-lcd-arduino-tutorial/

Last Minute Engineers
Learn to control I2C LCD with Arduino along with pinout, wiring, finding I2C address, adjusting contrast, arduino code, create and display custom characters
I dont get it
Oh, sorry, you were working in CircuitPython, not Arduino. My bad...
yeah..
You may want to ask in #help-with-circuitpython , as I'm less familiar with the particular library you might need to use with that display. (You would probably have a friendlier situation if you bought an Adafruit display instead of a random Amazon part without an associated tutorial.)
which display do u reccomend
There are lots, so it just depends on your requirements for size, resolution, color, whether you need text or graphics, etc. I think Adafruit has a similar 16x2 character LCD, for example.
I just need it to be able to display time
@everyone how would I connect an 18 pin ribbon cable display to a 15 pin raspberry pi DVI display port ?
Don't @ everyone
So. You just jumped into every channel possible and ran an @ everyone? Let's contemplate. What did you think would happen?
Fortunately it's turned off but it's still not good practice
It's like running into a room and screaming at the top of your lungs
I'm not even going to say anything, because I would only incriminate myself.
Otherwise... I plead the fifth.
hi
i just instaled adafruit microphone sph0645
i was wondering if i can flash an sd card with that would run the instalation automatically without me interfacing graphicaly with it
You mean flash the SD for the pi? You could make an image of your pi's drive and save it and then flash that
Anyone here experienced with the pi pico and assembly for it? I'm considering getting one to experiment with the rp2040 but I'm unsure what I'll need and if it's possible to code only in assembly on it
This channel is meant more for RPi SBCs and Linux help. Try posting to #help-with-projects instead. We discourage cross-posting, but I'm telling you to do it this time so you might get better assistance.
Oop, alright. Sorry for the bother-
No bother at all! Simply wanted to make sure you posted where you might get the help you're looking for.
Just a quick opinion question. I could not find a Pi HAT for 4G cellular (US) from Adafruit. Anyone have experience or reccomentations for one?
Or for a dongle type modem if you found that more effective.
So, i aparently dont know how to download on the pi
download what?
are you trying with pip?
did you get errors?
Nvr mind. Didnt read the page. Doesnt work with pi. They have an alternate set of directions
oh yah, this one, via desktop
https://codewith.mu/en/howto/1.1/install_raspberry_pi
you've got the desktop version of pi os installed?
i think so.
it'll be obvious. desktop version will have the GUI.
like what is shown on that page
then yes
cool. yah. try that approach. looks like it's available through the desktop software package manager.
though my instructor is teaching us through the terminal, he is also teaching the gui
anyone have the terminal code for an onscreen keyboard
So more of a confirmation question as google isnt telling me. I am planning on using a pi 2w zero as a octopi web interface for 3d printing and I want to hook up a USB web camera to it for remote monitoring and time lapse vids. All the info I can find for a camera on the zero is turning it into a web camera itself rather than plugging one into it. I can't see why I couldn't but before spending money on that project is there any reason that wouldn't work?
I am trying to avoid the pi camera specific attachment because of both cost and distance.
That should work, yeah... the USB port is on-the-go, so it ought to be able to act as a master for a webcam.
I am trying to setup a voice assistant and I got the #Adafruit Voice Bonnet for Raspberry Pi and wondering what I need to do to install drivers if anything?
website says to use the installer script but doesnt tell me where to find it at all
@mystic hare Are you using this Learning Guide https://learn.adafruit.com/using-google-assistant-on-the-braincraft-hat

Adafruit Learning System
This project makes use of the BrainCraft HAT to easily get Google Assistant up and running
I wasnt using google but yes I did find that guide
I have a Bonnet but have not used it. I used the BrainCraft Hat. The Hat (at least) was designed to use the Google Setup and then the Device specific setup.
I was actually able to get it all setup and working now. Well I think at least. I am using Genie with home assistant
So I know the mic and speaker work
Good. I'm not familiar with Genie.
just figuring out how to link it and make it work properly with Home assistant now
Sadly there isnt a ton of info on it
but open source and doesnt send everything to google or amazon so hopefully i can make it work
@mystic hare i hope you get it worked out. Perhaps someday you'll build your own AI server.
Lol probably not but maybe.
Does anyone know if it’s possible to code an input program with circuit python but have it run specific to a program, that way I can have the raspberry pi plugged in and not have what’s needed in focus?
What kind of Pi, and what is plugged into what? Could you give us your desired use case, or an example of?
The pico
Im looking to run a script for a program I have but the only downside is, with the pico plugged in, the program has the be in screen focus since otherwise it’ll just type gibberish on anything else I have open
I was wondering if it’s possible for the pico or any other possible device to know to only input the script into the said program without it being in focus so I can work on other stuff
Oh, I see. Unfortunately, the HID portion really only sends raw interface input data, like keystrokes or mouse clicks. If you're trying to communicate with a specific script in the background, you can consider serial communication instead of HID input. Unfortunately, there isn't a way to type to a background Word document, for instance.
Do you know any possible work arounds using HID input?
I think some macropads with active window detection run some sort of program to check what window is in focus. If you employ a similar application, it may be possible to pause your input while a different window is in focus?
Not too keen on details myself, unfortunately.
what app do you want to control in the background ? can it be scripted ?
hard to tell if it would work, depends on how it's made, but I believe what you want is something running on the computer that can send keys to an app, not using a microcontroller at all
I wouldn't mind upgrading any hardware im currently using
I have most of the script down already, but it's just difficult figuring out how to send the inputs into a non-focused window
and I'd prefer to not using a key injecting software as well
hmmm key injection might be your only choice here
or run the target app in a virtual machine ?
(where it would be "in front" inside the VM while the VM is not)
AutoHotkey seems to be able to send keys to a window if you look at point 8 in this FAQ: https://www.reddit.com/r/AutoHotkey/comments/4f4j9k/read_this_before_posting/
Yea, VM might work but it'd still require the VM to be in front right?
a VM should be able to "capture" a device, so the board would be "connected to the VM" and to the VM only, whether the VM is in front or not, but I never tried it like that, it will depend on the VM software I guess
Hey everyone, I have a pi zero W with the TFT joystick bonnet, running Raspberry Pi OS bullseye with armhf. I ran the install script on a fresh install (https://github.com/adafruit/Raspberry-Pi-Installer-Scripts/blob/main/adafruit-pitft.py) and it rendered the console for around half a second before going blank. What is causing this?
Hi I am attempting to use the A~ Voice Bonnet but am having trouble loading the S/W, specifically "pyaudio" when I enter "sudo pip3 install pyaudio". The test using arecord just before this step in the guide worked fine. Any suggestions ?
Am running Raspbian lite
I keep getting this error when trying to set up pico sdk. I got it to work once on command line and then tried it on VS code and it doesn't work on both anymore
arm-none-eabi-g++.exe: error: CMakeFiles/adc_console.dir/adc_console.c.obj: No such file or directory NMAKE : fatal error U1077: '"C:\PROGRA~2\GNU Arm Embedded Toolchain\10 2021.10\bin\arm-none-eabi-g++.exe"' : return code '0x1' Stop. NMAKE : fatal error U1077: '"C:\Program Files (x86)\Microsoft Visual Studio\2019\BuildTools\VC\Tools\MSVC\14.28.29910\bin\HostX86\x86\nmake.exe"' : return code '0x2' Stop. NMAKE : fatal error U1077: '"C:\Program Files (x86)\Microsoft Visual Studio\2019\BuildTools\VC\Tools\MSVC\14.28.29910\bin\HostX86\x86\nmake.exe"' : return code '0x2' Stop.

GitHub
AR10B2~1.EXE: error: ´╗┐CMakeFiles/blink.dir/blink.c.obj: No such file or directory NMAKE : fatal error U1077: 'C:\PROGRA~2\GNUARM~1\102021~1.07\bin\AR10B2~1.EXE' : return code &...
I'm following this guide: https://www.kite.com/python/answers/how-to-check-internet-connection-in-python to check for an internet connection in some code I'm writing. Does it matter the URL I use or is there a best practice for this kind of thing?
Well, often you'd just use the URL that you actually want to connect to. But if you just want a generic "am I connected" test, most people would use a relatively lightweight highly-reliable page like Google's home page.
ah OK I was leaning towards Google thanks.
I'm over-doing some test code
setting up a new pi, for Wifi Country I want US right?
hmmm I want to configure my pi to connect to a public wifi connection, but I can't have a blank password field in the imager setup screen.
having a weird issue with my pi. The new dialog system in the imager that allows you to setup, among other things, a username/password and wifi, IS setting up wifi but is NOT setting up a username/password. Does this seem like a bug?
I didn't change the default username but I did set a password, and that worked fine for me.
Didn't work for me, submitted a bug report, doing it manually instead
Mine was a few weeks ago; I know they've done some updates since then
annoying that my pi just rebooted and restarted the welcome process but did connect to wifi. I'm trying to get a password setup before connecting to the freakin' internet

are you loggged in as 'pi'?
It didn't ask me for a password so I must be
It died suddenly, not sure why, and this is what happened when I restarted. I'm just re-flashing the SD card for the 5th time today
What'd the error dialog say?
something about input/output error
wouldn't let me even run cmd line stuff so I'm just nuking it. I backed up everything of value a while back
I never can figure this out, when is it necessary to use sudo when installing stuff? Should I be using sudo pip3 install Adafruit-Blinka?
I recommend using either --user or something like Poetry or Pipenv.
Installing system-wide is seldom a good idea.
what does that call look like? I'm just using the command line
One sec.
thx
poetry is easiest, it's a little bulky, but super intuitive
(not bulky for the code, just the tool itself)
Python dependency management and packaging made easy
ah I'm using this pi to do one thing and one thing only, so that's OK
let me see if this pi has the oomph to open a webpage lol, have had bad luck in the past
curl -sSL https://install.python-poetry.org | python3 -
this will help you manage dependencies as well
the bottom part is the one you'd run in the Pi shell to install Poetry
the top URL was to their homepage, if you want to verify the SHA256 sums or anything, you can check there. If you trust some random Internet stranger like me to send you command line things, just run the curl thing. It'll install it.
🙂
Introduction Poetry is a tool for dependency management and packaging in Python. It allows you to declare the libraries your project depends on and it will manage (install/update) them for you.
System requirements Poetry requires Python 3.6+. It is multi-platform and the goal is to make it work equally well on Windows, Linux and OSX.
Installatio...
what is "poetry's bin directory"? The location of the binary file for Poetry?
people have all kinds of opinions about what tool is best, and I have probably used all of them, but, Poetry is the least complicated, and the hardest to F up.
It should have told you when you installed?
It said where that is, but not what that is
to your recollection, should it just be hanging out saying it's installing without any kind of install bar?
that's fine, I'm hourly
😄
Once installed, it's pretty sweet. It's not the most optimized and fastest and whatever, but it's dead simple, saves you all kinds of hassle when you try to run one or more Python things.
Among other things, yes.
hmmm, it says to test with
poetry --version
It'll use whatever Python versions you have installed
but that gives me
bash: poetry: command not found
just try this, can you open up another shell on the Pi?
yyup
do that, then type in poetry --version
OK, so then there's a line for what to put in $PATH, right?
Shell config file is ~/.bashrc
just stick that line in there
paste it in here first to make sure you got the right one

(I have a dotfiles script that automatically installs Poetry for me when I install an OS, so I don't even remember what the installer tells you)
so do this
It's not clear what PATH should be
thx
$ nano ~/.bashrc
that should open an editor
in that editor, page down to the bottom of the file
add this:
PATH="$HOME/.local/bin:$PATH"
then start a new terminal
should allow you to run poetry

So this is PATH/environment vars right?
what does $PATH mean? And I don't seen Poetry mentioned anywhere, how does it know to enable Poetry?
poetry was installed in the ~/.local/bin directory
Do this on the console:
echo "$PATH"
you can also type in env and hit enter to print out all vars
there we go!
💥
ok so now I can use Poetry to install Blinka?
yup
So Thonny doesn't have a grabbable top bar (can't think of the word for it). Any advice?

@civic rune Also, suggestion to use Poetry was not good for Thonny. You said you were on the command line. But. You weren't. So, I figured out how to do it in Thonny. Pretty neat little app.
Got a video of it. Gonna upload.
Thonny is a neat little app? Or your solution? Thanks for all your help!
Thonny is neat.
Ah yeah. It's low frills
But with this solution, it's even better.
There's a bit there where it was installing packages and took forever so I looked at my phone, so feel free to skip ahead
Anyone testing the new bootloader? Question about it: can you select non-standard images (i.e. those not provided by RPi)?
Based on ArsTechnica (https://arstechnica.com/gadgets/2022/02/raspberry-pi-bootloader-enables-os-installs-with-no-separate-pc-required/), you can only select images that are available from the Raspberry Pi Imager (at this time).

Ars Technica
Beta bootloader is available now, will roll out to all Pi 4 boards later.
Ah perfect ty - that's the info I was looking for
so i just cracked the housing on this component. i hope it will be fine. it looks like its funcyional parts are all intact, just a broken housing. i think its some kind of coil

seems to be a fairly common issue https://community.element14.com/products/raspberry-pi/f/forum/31207/there-is-a-broken-chip-on-my-rpi3-motherboard-labeled-4r7-i-just-bought-it-and-it-broke-while-trying-to-install-it-inside-the-case-will-the-board-still-work-with-that-chip-broken-can-i-cover-it-with-epoxy
Having a weird issue
Sometimes my pi will lose the ability to click important buttons


This seems to happen when I plug in some I2C breakout boards that use 3.3V
I can't even open a terminal to shut down, I have to pull the power cable
What model?
AW9523
Mmm, yeah
Are you sure they're 3.3v?
yup
because the I2C bus is pulled up to VCC. If VCC were greater than 3.3V it would damage most microcontrollers
chip datasheet says that 3.3 is acceptable
Did you do any soldering on the board??
I'll try one on mine - I'm pretty sure I have one. I'll get back to you
thanks!
NP
make sure you have the pi plugged in and running before you power on/connect the '9523
to replicate the issue
running into another issue, this time with instantiating I2C using board.I2C()
I run that and I get, after a long stack trace:
ValueError: No Hardware I2C on (scl,sda) = (3,2)
Valid I2C ports: ((1,3,2),(0,1,0))
isn't that when you need to enable I2C in raspi-config ?
I would have thought that installing blinka would do it, I swear it has in the past, but I don't recall clearly
hey that worked!
I believe the adafruit install script does it in theory, not pip install
Huh
I must have used the adafruit script to do it in the past? Don't recall. Thanks for the tip
This guide walks you through it https://learn.adafruit.com/circuitpython-on-raspberrypi-linux/installing-circuitpython-on-raspberry-pi
thx, I have kind of a weird setup on this pi. Mr. T is trying to teach my some software and it's led us down some interesting paths
I'm following this guide https://www.kite.com/python/answers/how-to-check-internet-connection-in-python but I get an error when I import requests
ah I guess it's just not a default lib in python
is the first library that shows up in my package manager, requests Python HTTP for Humans, the one I'm looking for?
that's it
cool thanks
I'm overdoing some test code because I want to learn things
hmm is there a way for my python program to tell if it was run from 1) the REPL 2)By clicking run in an IDE 3) from a command line or 4) automatically by say a process?
I want to be writing to a file, but I don't necessarily want the file to be overwritten on subsequent runs, so I was thinking a popup box that allows you to enter a new filename? I think I may be over thinking this since I'm writing test code that only I will ever run so I can just manually change the filename to be used in the code
if I want to write a text file, do I do filename = "somename.txt"?
You could make the filename a command line argument.
I was thinking of that
I didn't understand your next question about writing a text file. You mean as opposed to a binary file?
Hey guys im trying to find a pinout for the raspberry pi 4 b 3.5mm av jack and I cant seem to find one anywhere. Does anyone know an easy way to tell the channel pads apart?
I want to hard solder an amp onto those pads for 2 4 ohm speakers lol
put the plug in and test it with a continuity tester
I recently made the switch on my pi4 8gb to 64 bit rasp os and after reinstalling zsh, tmux, docker and some themes like powerlevel10k and ohmyzsh my pi idles at 1800 for the cpu frequency with dips to 600 every so often. Is that good for the pi to run at max frequency the majority of the time. At idle utilization is 3% and I’m not getting any extra heat. I have fresh installed 64 but twice now and it still does the same thing
https://www.raspberrypi-spy.co.uk/2014/07/raspberry-pi-model-b-3-5mm-audiovideo-jack/ has the plug wiring but not the pads. https://forums.raspberrypi.com would be a good place to search, and to ask further.
doing continuity tests would be good too, as Keri says
Yeah I'll just fluke it out to make sure. I don't have an extra 3.5 plug to mess with lol
should I ask here for issues with raspberry pico and circuitpython?
Nope! Please ask in #help-with-circuitpython
You'll get better assistance!
okay thanks!
For those that bought fingerprint scanners for RPis, which ones are reliable in your experience?
Hey, can someone kindly explain to me how clock divider in PIO works? I want to set a clock 5Hz in 74HC595, but I couldn't 😦
I definitely set up a username/PW on my pi, but when I turn it on, I'm not prompted for one. Is this normal behavior?
most likely an option turned on in raspi-config
ah thx
what is likely to be more accurate?
- calls to pygame.mixer.music.get_pos()
- time.monotonic() - init where init is a time.monotonic() call right after the song starts
@civic rune If you have time.monotonic_ns() on your board I'd suggest using it instead if you need accuracy.
Unrelated, but I am sad the RPi foundation didn't take the Zero 2 W as an opportunity to use USB C.
I don't need super duper accuracy, a few ms off is fine, I was just curious for when I do need accuracy
You won’t get guaranteed accuracy both due to Python and due to Linux on the Pi since Python is getting time-shared and is affected by system load
If you want accuracy you probably should move to an MCU
And note that RTCs are accurate over days and weeks but not at the micro or millisecond level
Oops, thought I was in robotics
It's not over a long period of time. I expect the drift in the clock to be <1ms
Then you can’t do that on a Pi
Can't do time.monotonic()?
hmmm
I can be off by a few ms and it doesn't matter
but the code I'm profiling must be run on a pi
Oh, you'll get a value but it won't be accurate at millisecond accuracy. I'd suggest simply trying things out and noting that the values returned by any time function on Linux on a Pi won't be accurate at high resolution. RTCs over longer periods can have seconds per month, etc. but the code that delivers your function is sharing the OS and there's no backing clock except for the system clock.
That said, it may very well be accurate enough for your (and most people's) purposes.
I ended up hooking an MCU to my Pi to use as a reference clock since my Pi gets under heavy load at times.
Yeah I can be like 30 ms off and it won't make an appreciable difference
Then you're probably fine. I am using mine for a PID controller where each call must be quite accurate otherwise it can get into bad feedback loops. Actually, four PID controllers.
Yes, but no more immune to clock fluctuations than any Python time function. If one's requirement is milli- or microsecond accuracy in Python on Linux, you need to provide a hardware clock that isn't affected by load or time-sharing.
Basically what I'm saying is that you need a hardware clock with the required performance, not a software clock.
yes, though a larger sample size can help
an alternative could be triggering something off-board that can measure more accurately
Over multiple calls, yes, but if we call "resolution" the ability for a single call to be accurate at the micro- or millisecond level, it must be a hardware clock. As to an external clock, I mentioned that I'm myself using the hardware clock of an external MCU connected to my Pi as my source of a 20ms pulse. I'm getting accuracy (resolution) there of about 1-2%. And any MCU will do, clearly the higher clock speed the better. I'm using both a TinyPICO and a QT Py RP2040 for this.
If I try to get a 20ms pulse from the Pi itself (in Python) that clock can vary from 20ms to 40ms or more etc. depending on load.
Makes sense. I only expect my Pi(s) to be fast, not precise.
If you want true precision, Python is also not the best bet
I've seen SAMDs drift up to a second per minute 😦 Espressif are much tighter. Haven't measured RP2040.
I’m not sure how much of a market there’d be but I’d love it if Adafruit or Pimoroni or somebody would sell a high resolution microsecond accurate I2C clock board. Nobody does AFAIK 😔
It wouldn’t even need to be setable really or even provide milliseconds since the epoch like in Java, but that’d be handy
Even just a relative 1uS pulse would be welcome
Would you want like a pulse-per-second output for the high resolution? I2C isn't fast enough to do microseconds itself.
Any coms on Python on Linux is prone to that issue, but if I called the board I’d always get a 1uS accurate number (absolute or relative) subject to the constraints of the cons protocol. I’m not sure how else it could be connected to the Pi...
s;cons;coms
GPS does it with a separate PPS output signal, where the edge is exactly on a second boundary, even though the UART stream is much slower.
Yeah, like an RTC GOS is very accurate over longer periods but low resolution
I hate typing in a phone 😑
s;GOS;GPS of course 😑
(I’m lying in my hammock in my front porch so I really shouldn’t complain) ☺️
what is the ground symbol on the back of the rasberry pi mean exactly? cant find it anywhere

well i assume its ground
I wouldn't necessarily assume that
i should mention i dont expect it to to be your typical ground if anything tho
Eddy, the E that eats capacitors!
I don't think there's more than 1 ground on the pi
Maybe isolate the image and do an image search?
Seems to be a TELEC certification symbol, which is the Japanese equivalent of the FCC. https://www.gmcompliance.com/japan-telec-certification-service/
Japan TELEC Certification Service
I thought some regulatory body
Anybody have experience in Plymouth theme creation? I've been fiddling with it for days now, and am at the point where I am just ready to pay someone to convert a MP4 into a usable Plymouth theme >< I found some OSS software to do it, but spent a day on EOL'd Python2 libraries before giving up.
This may have been asked before, but could I use the Raspberry Pi 400 and use the CYBERDECK HAT and a screen as the main screen output instead of a connected HDMI?
yes
other than the STEMMA connectors, it's really just a GPIO adapter - not much going on
so can just follow same TFT guides that show how to set that up
product page list various TFTs:
https://www.adafruit.com/product/4863
so just follow those, and then to their learn guides, and follow that
other than this one potential quirk:
https://learn.adafruit.com/cyberdeck-bonnet-and-hat/fixing-pin-conflicts
there's nothing CYBERDECK specific to deal with
Awesome, thank you!!!
Can I somehow debug a .net f program running on armv6 ( pi zero , mono )?
Im having an issue thats arm specific as it works perfectly on my windows machine.
QEMU may be the tool you're looking for: https://www.qemu.org/docs/master/system/target-arm.html
Though perhaps I'm a bit confused about what you're trying to accomplish, so here's another angle:
https://developer.arm.com/tools-and-software/server-and-hpc/compile/arm-instruction-emulator
Arm Developer
Arm Instruction Emulator allows you to run Scalable Vector Extension (SVE) code on Armv8-A compatible platforms
Yeah, no I need to be able to debug c# (.net framework) code running on pi zero w, if accomplishable by any means?
Learn how to debug .NET apps on Raspberry Pi and similar devices.
This is with .NET core though (speculating since console has a command dotnet publish) ?
Pi zero doesnt support it since its arm6
Not sure - I haven't tried it. If it is possible - something like this is probably the way.
Yeah with .NET core, my program is running on .netframework aka mono on linux
hrmmm, it does say you can choose .net or .net core. Its probably worth a try with .net. If you're using the visual studio instructions I don't think you even need to install anything on the pi
I'm using rider on my main pc :/
Doesnt vs code require like 30 extensions to work with c#
Yeah, it also runs directly on the pi (its so slow on an original zero and 3 b+ or less though). I don't think you need any extensions if you use the free full Visual Studio - but thats its own hassle.
Doesn't seem to be a lot of literature about debugging it with other things. Worst case - you could just fall back to logging
Anyone have a favorite USB webcam? Decent resolution… and extremely “plug and play” friendly? Ideally NOT requiring a USB power hub.. this will be on a RP400
Hello, does anyone have experiences with PIO RP2040? I have read its datasheet and it shown there about period of cycle (page 332), I am wondering why this .program squarewave has 4 cycles instead 5? Does [1] not count as a cylce? Or am I missing something? Thank you!
c .program squarewave set pindirs, 1 ; Set pin to output again: set pins, 1 [1] ; Drive pin high and then delay for one cycle set pins, 0 ; Drive pin low jmp again ; Set PC to label again
I'm not that familiar with the PIO, but I'd assume that the cycles would be:1: drive pin high 2: extra delay on that command 3: drive pin low 4: jump statementSo it ends up with 2 cycles high and 2 cycles low.
Yes I think the same way too, this [1] wont count as 1 cycle, but I need like a theoretical reason behind it 😅 thank you for the answer!
Hey guys i purchased the smartPI touch pro from adafruit. I have to say this is a wonderful addition. Excellent instructions. Very happy with this!
I did have a question. I installed an onscreen keyboard thats pinned to the task bar. Very nice. But running scripts in a cmd window I cant seem to use ctrl d to terminate them. Any suggestions? Mostly looking to end and restart a script after sending changes from my pc
You can probably trap a Control+D.
Your terminal would be configured to pass it to the far end of the connection (may not want to by default).
I don't know what a 'cmd window' would be in this context.
In unix maybe stty could help.
I use it to catch one signal that gets passed through if I do not do it.
$ stty -isig
$ ssh -p 987 this.host.com
[-]isig
enable interrupt, quit, and suspend special characters
I was keyboard-flubbing which disconnected me from their server, and the above helped that.
(in a live keyboard telnet-like session)
I have a couple of Logitech C920's. There are several other models in this series. They work fine on Linux and Windows. They have a standard interface. They were scarce for a long time but are now generally available again.
I'm looking for the "best" way to upgrade python on my Pi to the latest version. This (https://stackoverflow.com/questions/64718274/how-to-update-python-in-raspberry-pi) accepted answer has an intermediate step where you run sudo apt-get install -y build-essential tk-dev libncurses5-dev libncursesw5-dev libreadline6-dev libdb5.3-dev libgdbm-dev libsqlite3-dev libssl-dev libbz2-dev libexpat1-dev liblzma-dev zlib1g-dev libffi-dev
and claims it makes managing dependencies much easier. I don't like running random code that I don't understand. Does anyone know off the top of their head what all these installs are?
I'd be all about sudo apt-get -d install <foo> and then drop the -d switch on a repeat iteration.
precede with sudo apt-get update
You can also sudo apt-get upgrade which iirc is fairly global.
There's a dist-upgrade (or similar spelling) target as well.
I just did the sudo apt-get update and sudo apt-get upgrade and dist-upgrade on thursday
Then it ought to be current I'd suggest.
When you do try to upgrade python it'll most likely tell you you already are on the lastest version.
I have 3.9, latest is 3.10
I don't remember if apt-get requires you to solve dependencies by yourself (it might!)
You can look at package files to check on that.
I probably don't need 3.10 but all the docs for the libraries I want to use are in 3.10
ooooh
I can change the version
/var/lib/apt/lists has the resources.
thx
hello, can someone please tell me how to write a nodejs script to ping each second my bmp280 sensor that I hooked up to my raspberry pi?
I connected like this https://i.imgur.com/KtIUzb3.jpg
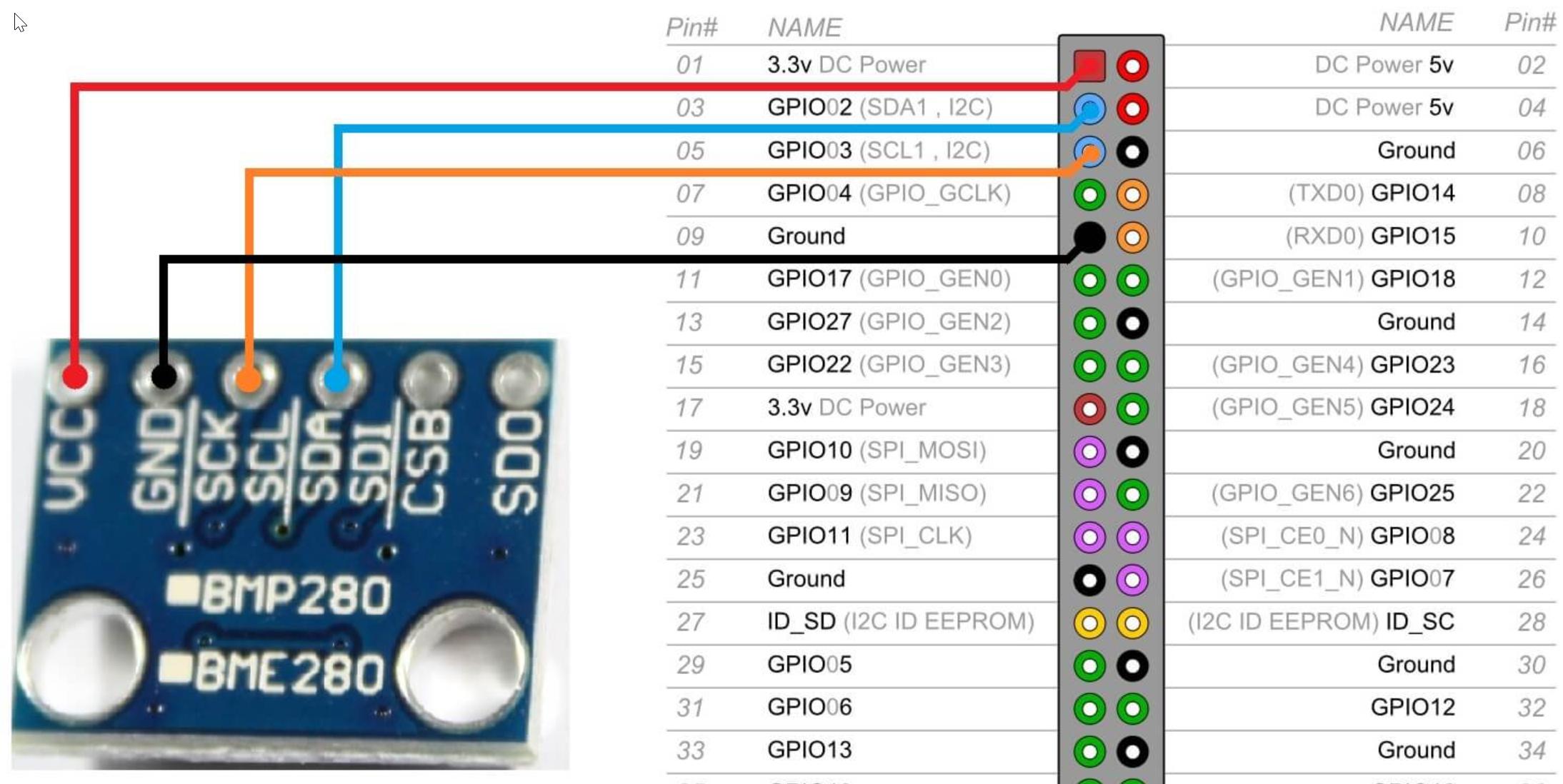
{kind=link}
@civic rune for regular Debian I usually:
https://packages.debian.org/bullseye/python3
what would be a good tool to create a CSV manually on a pi?
cool thx
here's debian's 3.10 version:
if it says 'pool' in the path you're in the right place (for Debian).
I have downloaded directly from these directories and installed the .deb manually, and resolved dependencies myself.
Can be a project. ;)
I don't actually need any features in 3.10, I just mistakenly thought I couldn't access the 3.9 docs
print statements, or a spreadsheet program like LibreOffice Calc"
ooh ok thanks
I'll see how to install that from the command line, it's a 3 A+ so it struggles to do much of any web browsing
you mean Google Sheets is difficult, I guess
I can't tell if libreoffice actually installed or not, at the very end of the process a fetch failed, and I can't find Libre Office anywhere in my pi.
The error message is too long to type out and too long to take a picture
Every time I think "I'll just do some simple web browsing on my pi, can't hurt right?", I get burned. Every time.
hello can someone please can help me regarding bmp280 sensor
when I run i2cdetect -y 1 it shows me an address i2c on 76
and then I put this code, but it doesnt work:
const bme280 = require('bme280');
bme280.open({i2cAddress: 0x76}).then(async sensor => {
console.log(await sensor.read());
await sensor.close();
}).catch(console.log);
this is nodejs script
Any suggestions for setting up Rhasspy on a Pi 4 / Voice Bonnet pair ?
Running Raspi Lite (32bit).. The bonnet works..
I have a question about RPI and neopixels. So it's about the brightness. I mean to me there is a good variation of the brightness from 1 to 2 but to me 128 to 255 they all look the same. Is it normal I am missing something. Thanks!!!
;)
You can measure the total current in the strip.
Maybe use a 'lux' meter.
candlepowerforums is the place where they ask how bright a light is
That's quite normal. The PWM value controls the linear amount of current and light, but the human eye perceives "brightness" very non-linearly, since we have to go from moonlight to sunlight across many orders of magnitude.
Ok so I'll try to work around the issue then in code. Thanks there are no 10 bits strip for 1024 variation ? 😉
Not in the smart-LED world that I know of. There are some standalone LED controllers with 16-bit PWM on top some analog current control, though.
You can probably apply a logarithmic curve to your adjustment parameter to make it feel linear
"Gamma correction" is a good term to research for that.
Anyone have a good text editor for the pi that isn't Nano? I am looking into Sublime Text to see if it will run OK on my machine
for what main purpose? quick and easy edits of a text file? or code editting with syntax highlighting, etc.?
I'd like to be able to some coding with it yeah
check out vs code also:
https://code.visualstudio.com/docs/setup/raspberry-pi
ah well, sublime text doesn't work on my pi it turns out
thanks I'll check that out
Shoot, it runs real slow, it seems it's not officially supported. I'll see about other options. I need the absolute basics when it comes to syntax highlighting
did you try geany? i think that's preinstalled maybe?
Geany seems OK, I was just hoping to duplicate a workflow on my normal PC. It's not a big deal
yup
Notepad++ is not super fancy, but doesn't seem to exist for linux at all
and if I don't have the absolute weakest pi available, it's close
Hi, i have been watching at this hat: https://shop.pimoroni.com/products/adafruit-1-3-color-tft-bonnet-for-raspberry-pi-240x240-tft-joystick-add-on. and I was wandering, could use it with retropie on a raspberry pi zero?
Yes to Pi zero. Retropie doesn't recommend it, but I believe there are ways to make it work?

so If I install the driver it should display raspbian or retropie?
Not sure. I think people have had to use some pretty hacky workarounds to get it to display any kind of desktop.
do you recommend any hat to create a handheld emulator?
Hey y'all got a beginner question here. So I am powering my raspberry pi zero w 2 via the gpio pins. I have a simple switch that allows me to turn on and off the pi. This switch is rated at 3A DC but I can't seem to be able to power the pi with it. Powering the pi works fine when it doesn't run through the switch. Any idea on what I could do here? This is my circuit:

do you have a DMM?
yeah it never goes over 1A though when it isn't using the switch
I was going to suggest testing continuity between the pins you're trying to pass power through, while the in the position you intend to be the "on" position.
I'm not sure about the pi zero but note that for the other pis, suddenly cutting power to it is usually advised against
I'm following the instructions here https://www.geany.org/download/themes/ but I don't see a directory ~/.config
Geany ThemesGeany-Themes is a collection of color schemes for Geany, either written originally by the Geany community or ported from color schemes for other editors.These schemes are compatible with Geany 1.22 and greater.
ah there it is
yep I have continuity
~/.config/geany/filedefs/filetypes.common
Try geany with and without that file present.
I might be crazy, but I think that the password I set up for my pi at first boot just straight up didn't stick....
Is that possible?
Unrelated, but I'm getting connection refused when I try to ssh into my pi from my windows machine:
C:\Users\MyName> ssh pi@MyPiIPAddress
figured out I should be using wlan0 and no lo, but now I get connection timed out
I opened a file with Nano and then somehow closed it without closing it. Now when try to open it again I get
File TheFile is being edited by root open anyways?
How can I fix this?
Chances are the previous instance of Nano is still running in the background somewhere. You could try to re-foreground it, or kill the process.
what does fore-grounding it look like?
or killing it for that matter
or rather how do I find a pid?
look in top or ps
hmm
Situation: I bought a USB dongle that allows me to power the Raspberry Pi Zero over a USB-A port. Here: https://www.amazon.com/iUniker-Expansion-Breakout-Raspberry-Inserted/dp/B07NKNBZYG/ref=sr_1_6?keywords=raspberry+pi+zero+2+w+usb+dongle&qid=1643130449&sprefix=raspberry+pi+zero+2+w+usb%2Caps%2C83&sr=8-6
I followed the instructions to set up SSH via USB, yet I cannot get access on SSH on neither Linux nor Windows.

iUniker USB Dongle Expansion Breakout Module Kit for Raspberry Pi Zero/W, Both Front & Back Side Can Be Inserted
I usually use ps aux | grep something
hmmmm kill Operation not permitted
sudo it, it's a root process
might be some lock file ?
I'll try closing the command window and re opening
that did it lol
well I learned something
oh well, close window(s) and open it back up fixed it again 😄
turn it off and on again! always
Has anyone used the RPI Imager and noticed that it doesn't actually set a password?
Which version of Imager are you using?
the absolute latest AFAIK
ah it sayts 1.7 but I updated to 1.9. Let me try again
nevermind, 1.7.1 is the latest, I was thinking of some other software
Yup, just re-tried it and it simply didn't work
Also the password setup procedure doesn't actually make a password stick. When I go to raspi-config and click Change Password it simply prompts me to enter a new password, and doesn't require the password I just set first
which image did you set up?
the default basic one at the top
I'm trying it now; I'll let you know how it turns out.
Cool, thanks!
(I've had this work before, with a previous Imager)