#point-set-topology
1 messages · Page 166 of 1
Up?
Lol
I'm having trouble understanding this bit of a proof of a theorem on finite total curvature.
If anyone has any insight it would be greatly appreciated
Reading a different book on manifolds, but got to this:
That example ii)
The function isn't even C^0 is it?
Oh pfft I read the wrong part of the definition
radius r, and center P. Show that the image of S under F is a circle.
[Hint: Let S' be the circle of center F(P) and radius r. Show that F(S)
is contained in S' and that every point of S' is the image under F of
a point in S.]```Do you really need to prove every point in S' is image under F of S?
I don't get the reason to have it mentioned
I get the subset thing
But how will F(S) even have any point in it other than the image of S?
Or it's just the usual formal thing?
np
on what domain/codomain
a region I guess? (Why would it matter ?)
Oh yes I see the reason why it matters
Like C to C
Then yes
I suppose it should be a homeo since it is its own inverse.
Okay thnkx
and obviously cont.
@bitter yoke It is a homeomorph also in the case right where it is a mapping from the domain to the image of the function?
yes
thnx
AlgTopo_irl
Hey can anyone help me understand the outline of problem 1 section 52 in munkres?
Hey guys... I wasn't sure if I could post a question here so I asked a topology question in #help-0 if any of you want to take a gander.
You can ask questions here
So is all that's in Homeo(S^1) (where S^1 is thought of as [0,1) mod 1) rotations and reflections (Since expansions and contractions aren't bijective)? I was trying to think of S^1 as lim n-> infty (D_2n) but not sure how that would be formalized or helpful in this case.
You can have many other maps in homeo S^1
Though they aren’t easy to write down explicitly
oof
In particular, think about contracting part of a circle and dilating outside of it to account for the contraction
ah ok, I can see why this is a homeomorphism, ty
My manifolds book just proved that taking global sections of a vector bundle over M is full and faithful
And defined subbundles to be embedded submanifolds whose fibers are subspaces
With the restriction of the projection map and all
Oh sorry C^infty(M) modules
Got distracted helping someone in algebra, I'll finish this question in a sec
So define an inclusion of vector bundles (over M) to be a bundle homomorphism ι : D -> E which is a smooth embedding
This has to be injective, so it's injective on fibers, and gives us a consistent way to identity D_p with a subspace of E_p
Is there an algebraic condition on a C^infty(M)-module homomorphism φ : Γ(D) -> Γ(E) that tell us that the induced map D -> E is an inclusion?
I'm skeptical
Or hmm so in the algebraic setting the problem is basically that you don't always have that many global sections but I guess in smooth manifolds you can play bump function games
So maybe there is something here
You saw nothing
:0
So like the best possible thing would be to just require φ to be injective
And I haven't been able to find a counterexample
But that's mainly because I don't know very many bundles or bundle homomorphisms
Also, if we consider vector fields on the sphere as maps S^2 -> R^3, crossing with the unit normal gives a C^infty(M)-module endomorphism of the set of vector fields
What does this look like?
This is like calc 3 or earlier geometry
But I'm having trouble visualizing what crossing a vector field with the unit normal does
Okay!
Suppose M is a set and d, d' are two different metrics on M. Prove that d and d' generate the same topology on M if and only if for each x ∈ M, there are some r₁, r₂ > 0 with Bᵈ'(r₁, x) ⊆ Bᵈ(r, x) and Bᵈ(r₂, x) ⊆ Bᵈ'(r, x).
i'm not sure how to start the backward direction
could anyone give a hint
whomst ping
oh my god
i remember
ok fine :|
imma throw away this ice cream
*ice cream cup
okok how did you do the backward direction
@gritty widget what have you tried so far?
idk i'm kinda stuck
for the forwards direction i used open iff union of open balls
okay well, what does it mean exactly for two sets to generate the same topology
they generate the same open sets
that the existence of those r₁, r₂ show every open set in (M, d) is open in (M, d') and vice versa?
i mean, more concretely, we want to say that an open set O under d is open in d'
and vice versa, right?
ya
so, start be letting O be open wrt d
how can we show that it is also open wrt d'?
(start by taking an x in O. What can we say about that x, since O is open?)
every x is an interior point of O
think about it in terms of open balls and metrics
for some s>0 you can find an s-nbhd of x contained in O?
i mean yes, so for every $x \in O$, we have $x \in B^d (r, x) \subset O$
Sloth:
what relationship do we have between the $B^d (r, x)$ and balls around x under the metric d'
Sloth:
be a little more specific
idk
well, its literally stated in the hypothesis right
yes
for each $x \in M$ and thus each $x \in O$, we have $B^{d'} (r_1, x) \subseteq B^d(r, x)$
Sloth:
right so from 'for each x ∈ M, there are some r₁, r₂ > 0 with Bᵈ'(r₁, x) ⊆ Bᵈ(r, x) and Bᵈ(r₂, x) ⊆ Bᵈ'(r, x)' we're trying to prove that d' and d generate the same topology
oh
do you see now?
Well, we've shown that if O is open in the d-topology, each $x \in O$ has an r-ball around it (with the metric d)
Sloth:
and our hypothesis states that any r-ball with the metric d has an r1-ball with the metric d', such that $B^{d'}(r_1, x) \subset B^d(r, x)$
texit u there
Sloth:
@gritty widget do you know what it means for a set to be open in terms of balls?
$\forall x \in G: \exists r>0: B(r, x)\subset G$?
mátt:
right
so we just showed that for every $x \in O$, we have an $x \in B^{d'}(r_1, x) \subseteq B^d (r, x) \subseteq O$
Sloth:
right?
hi zoph
cool ty
yeah
and you can see that its like
the exact same thing for showing sets open in the d'-topology are open in the d-topology
nah its fine
Let $(M,d)$ be metric space, let $c$ be a positive real number, and define a new metric $d'$ on $M$ by $d'(x,y)=c\cdot d(x,y)$. Prove $d$ and $d'$ are generate the same topology.
mátt:
So I chose $r_1 = r_2=r/c$. Then $B^{d'}(r_1,x) \subset B^{d}(r,x)$ and $B^{d}(r_2, x) \subset B^{d'}(r,x)$, so $d'$ and $d$ generate the same topology
mátt:
scratch that r_2=r/c and r_1=c/r
difference between strong continuity and just regular continuity? I couldn't find anything useful online
In particular, for p: X -> Y, U open in Y iff p-1(U) open in X is what I find for both definitions
no, the definition of continuity is U open in Y implies p^{-1}(U) open in X
it only goes one way
ohhhh
so strong continuity says p^{-1}(U) open in X implies U open in Y?
and vice versa?
in addition to continuity yes
kk thx
can u help me figure out what this transform into? (all the points labeled with c go into the same point and the and segments labeled with a and b go to the segment with the same letter, in the direction indicated by the arrow)
i have an easier question if someone wants to help me out
I have to proof the following statement: In a finite topological space, the arbitrary intersection of open sets is an open set.
If the space is finite, there must be a finite number of open sets, and by the definition of topology the intersection of a finite number of open sets is an open set.
but i'm not entirely sure if that proves it
what makes you unsure
idk haha
"If the space is finite, there must be a finite number of open sets" this makes me unsure
the discrete topology
how many elements has it
2^n with n the number of elements?
hmm ok
ty ^^
and do u knwo about the other question? idk if i explained it correctly xD
well
by joining segments/point i assume you mean passing to the quotient space
if you identify the sides a and b with each other you get T^2, i.e. the standard torus
not sure what exactly you mean by joining the c's
can you formalize it?
yeah i meant passing to the quotient space
i know that identifying the sides u get the torus
the segments labeled with c go to the same point
if there was only one segment with c i know its the torus with one point "collapsed"
and im afraid its going to be hard to formalize and im supposed to be able to do it "graphically"
what exactly are you supposed to do?
draw a picture or find a "better" space it is homeomorphic to?
find a better space it is homeomorphic to, but its most likely a space that can be drawn xD
or at least a well known space
it is
but the sphere shouldnt have the c line in the middle
maybe 2 spheres with 1 point in common?
with you torus pov you can also glue the c line
in my last picture, i can see clearly that without the c line it would be a sphere
but with the c line i cant visualize it xD
well i have to keep thinking on it a bit more, but thank u very much Zak and Lochverstärker
I think it's clearer with the torus drawing
what is a characteristic map (relating to CW complexes)
@grim coyote what do you know about CW complexes?
A CW complex structure on a space X consists of a partition of X into "cells" {e_α}. Each cell comes with a map φ_α from the closed n-disk (n dependent on α) into X which restricts to a homeomorphism of the open n-disk onto e_α
You need other axioms too
But φ_α is the characteristic map of e_α
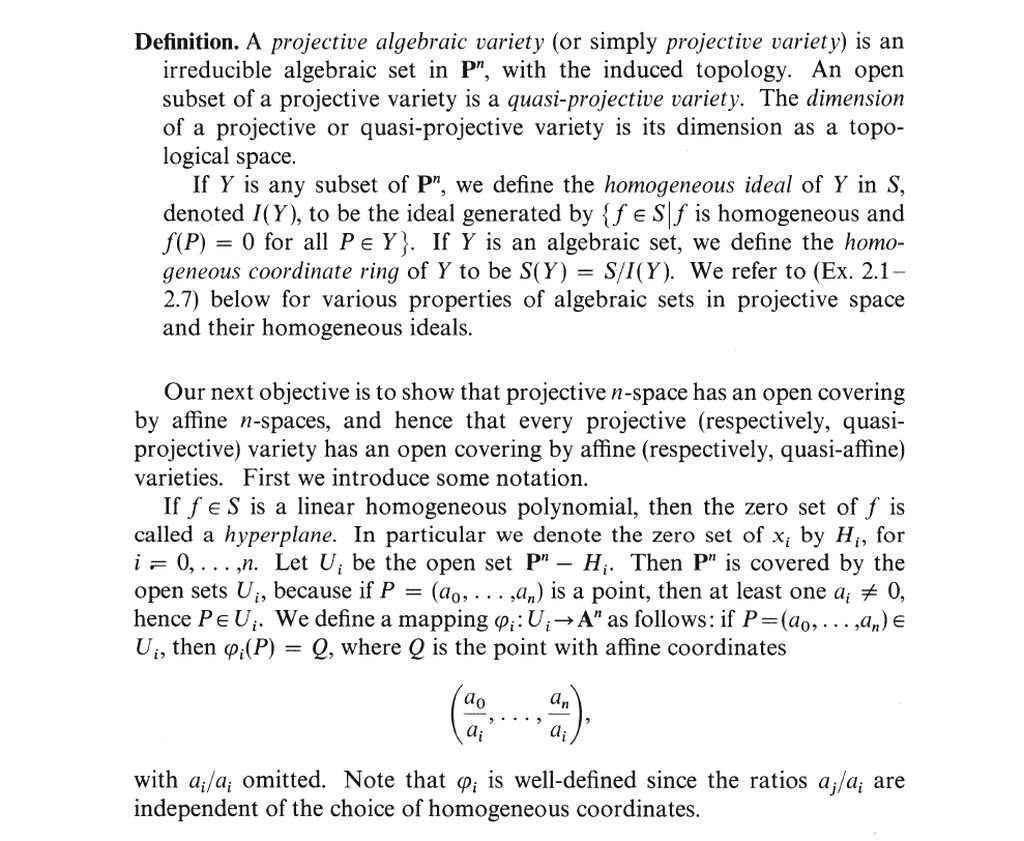
I'm trying to work through Hartshorne right now. Does anyone know what is meant by the zero set of x_i here? https://imgur.com/a/T1RC1Ji
@red atlas I don't think Hartshorne chapter 1 is very good
I started with it and switched to Gathmann's notes
Sorry for the unsolicited advice
Haha, that’s good to know
mátt:
so this is one direction of the proof
idk if it's the simplest
but does it hold up?
this is for me?
oh no
ok sorry
but look at the definition of submanifold
interesting
@gritty widget $x \notin \partial A$ gives you that any open neighborhood $N$ containing $x$ does \emph{not} intersect points from both $A$ and $X \setminus A$. In other words, $x$ belongs to either the interior or exterior of $A$. Well, since $x \notin A$, it must belong to the exterior.
kxrider:
I think everything else after that is alright tho
wait I misread what you said. I think read "or" as "and" somewhere 
mátt:
@little hemlock ya ty
mátt:
Anyone here with knowledge in algebraic topology?
I'm iffy but in principle yes
Do we ever deal with tensors of non square matrix representation in Diff Geom. ?
probably not i have never seen such a thing
something like a vector valued 1-form? one index ranging up to the dimension of the base, the other index ranging up to the rank of the bundle
anyone know where I can get some questions like this ? preferably with answers
Thanks for the suggestion looks similar to my course, thanks
Can somebody tell why is Dg(x_0) nonsingular
Or more particularly why is Dpi(x_0) non-singular
D\pi isn't non-singular, it has a kernel, but it's got maximal rank
Since pi is linear, Dpi = pi
Now beta is what we'd need to know about to infer non-singularity of Dg

@little hemlock did you know this is true when A is open or closed?
nope
Well that's a good place to start
It tells you that a broad class of examples won't work
What have you tried already?
I started by trying to do it with the mobius strip, but then I figured it would probably work with a simpler example. Like a space where you take an interval [0,1] and identify its end points.
Yeah that's what I was thinking
Do you know what we call the space where you identify the endpoints of [0, 1]?
nah, but I imagine its something homeomorphic to S1, right?
Yeah I mean I call it the circle
So how can we sort of screw this up?
What A might we want to choose?
maybe [0, 1)?
Yeah, that's a good idea (since it isn't open or closed)
So what's the image of A?
it has the same image as [0,1] under the identification map where you send points to the subset they belong to.
Right
So let's think about why this can't be an identification map
Is there any geometrical sort of reason you see?
Draw a picture of a half open interval and a circle maybe
yea this is kinda where I got stuck. hmmmmmm
hmmm
So we start with p : [0,1] -> S^1 given by p(t) = e^(2 π i t)
then restrict this to q : [0,1) -> S^1 given by the same formula
What does it mean by definition that q is an identification map?
Also are you using Brown's book? I haven't seen the terminology identification map anywhere else
q is surjective and the topology on S^1 is the largest for which q is continuous. i.e. U is open in S^1 iff q^-1(U) is open in [0,1)
nah, this is armstrong
Ah okay
Well then I'm not sure if it's in there but there might be another definition of identification map. Do you know what a saturated set is?
nope, what is it?
Don't worry about it
So let's try to think about sets U which aren't open but whose preimage is open
In most places on the circle, this map looks like p, which we know is an identification map, right?
So U had better involve the weird point
what happens if you take the preimage of such a set?
something like [0, a]U[b, 1) which is closed so hmm
It's definitely closed
Oh sorry no
I think you chose a slightly wrong set
I mean, would that set even have open preimage under p?
How could we modify it so that the preimage under q is open?
well if we just removed one of the endpoints, we would get something like
[0, a]U(b, 1)
which is hmmm, looks like is not open nor closed
That's true, but we want the preimage to be open, right?
However if we remove the other endpoint, then the set itself becomes open
So maybe we can't just take any set containing the bad point. Any other ideas?
Right, and what does that tell us?
welp, since [0,a) is open in [0, 1) that would be it. no identification map
Yeah, that's exactly right
Here's maybe a shorter proof
q is injective, right?
well an injective quotient map is a homeomorphism
But the circle is not homeomorphic to an interval
(proof: an interval has a point you can remove to make it disconnected, while the circle has no such point)
ah yea thats slick. Thank you for guiding me through! appreciate it 
hmm, I am learning about connections on a manifold. I understand something like $\nabla_{X} Y $ where Y being a vector field produces a vector field. But I don't understand what $\nabla_{[X, Y]} Z $ is supposed to be
bibek22:
where on the lower slot it somehow involves product of two vector fields? How is that defined and how does it relate to the definition of connection
@sick elm it's called a Lie bracket, takes in two vector fields and spits out a third, so that still type checks
It's a kind of commutator basically. Tbh I don't know diffgeo well enough to explain further but at least that's the term to Google
you can also think of [V, W] as a derivative of W as it goes along the flow V
If T and Y are vector fields, and φ is the flow of Y then [Y, T] equals
Where we're taking the derivative in the tangent space at p
you don't need a connection to define [x,y]
no, it's a response to "how does it relate to the definition of connection"
@sick elm try computing the components of the riemann tensor
or even the torsion tensor
in that example the lie bracket just makes in the torsion tensor tensorial
isn’t the right way to think about [X,Y] to be a measure of how hard schwarz’s theorem (interchanging of derivative) fails?
if one thinks of X(f) as the derivative of f in direction of X
in ℝⁿ, [X,Y]=0 for all vector fields by schwarz’s theorem
in arbitrary manifolds it can tends to be nonzero
that's exactly what the curvature tensor does
$R(\omega, Z,X,Y) = \omega (\nabla_X \nabla_Y Z - \nabla_Y \nabla_X Z - \nabla_{[X,Y]} Z)$
mátt:
@midnight jewel uhh [X, Y] is not always zero in R^n
Your thing only applies to coordinate vector fields
Edit: the lie bracket is R-bilinear but not C^infty(R^n)-bilinear, so you can't just pull the coefficients of the coordinate vector fields out. The lie bracket satisfies a sort of product rule, which you can derive from the lie derivative formulation I posted above
hmm
thanks for pointing out my misunderstanding
I’m struggling a lot with diffgeo and have definitely too many half- (or un-)truths memorized
but yea, makes sense
I didn’t think about it carefully enough
it does hold for “constant” vector fields though, right? like, ones that always point in the same direction
I'm not sure what you mean by that
Oh yes I am
Yeah so if the coefficients of the coordianticr vector fields are constant, then you can use R-bilinearity
And the fact that the bracket of two coordinate vector fields is 0
is any of the option here incorrect ? all of it looks right to me
only one here is correct
am I dumb? I can only see one that I find obviously incorrect
||the first one is definitely wrong as it’s supposed to be the union (modulo details with retaining the basepoints)||. what are the errors in the other ones?
||the second one is correct iirc. the third one one could argue about the word “inherited” which probably should be “induced” but that’s nitpicky. the fourth one is correct as far as I can tell. the last one depends on your definition of tangent vectors, but “element of the tangent bundle” doesn’t seem to me like the worst definition||
yeah sorry. first is incorrect, i see that now. what's wrong with the last three
sry, what does mean "the target space of a smooth vector field" ? For me it means that it is a vector field, it can't be true
but yes, 2nd, 3rd and last are true
A smooth vector field is a smooth section $\func{\sigma}{M}{ TM} $ such that $\pi \circ \sigma = id_M $ where $\pi $ M and TM constitute a tangent bundle
isn't it so ? and then wouldn't total space be the target space ?
that latex got messed up sorry
bibek22:
oh ok it's the definition
if you take something like a sphere and identify the points along its equator, what quotient space do you get? I feel like it would be a union of two spheres sharing a point, but idk
it's the wedge sum of two spheres
(the wedge sum is the union sharing a point you mentioned)
This is actually really important when constructing higher homotopy groups
well for spheres the 2nd homotopy groups
Also note that this works for circles too (but then the equator is just two antipodal points)
i see...
Sorry, that's probably not meaningful to you right now
If you have two maps f, g : S^2 -> X such that the value of f on the south pole is the same as the value of g on the north pole, you can "concatenate" them to get a map S^2 -> X which first squashes down the equator, then evaluates f on the top hemisphere (which is now a sphere) and g on the bottom
Does that kind of make sense visually?
ah, is this function glueing stuff?
@sick elm are you watching schuller's lectures
@gritty widget yessir! these are great
idk anything about diffgeo but it makes my Ricci tense 😫
Ricci tenser
Is there a general procedure for determining a T that maps a R^n space to an R^n space such that all the regions are relatively compact and are nearly of equal size like in the following
sorry for bad ms paint picture
Doesnt the fact that a is a coordinate patch on a Manifold M of class C^r implies that even a^-1 is of C^ r as well
Where U is in R^k and V is in R^n
<@&286206848099549185>
I'm guessing that in a few lines he'll cite something like the inverse function theorem
Or implicit maybe in this setting
But it's possible for a smooth map to be bijective but not have an everywhere smooth inverse, e.g. x^3
But if you know the derivative is everywhere full rank then yeah inverse/implicit games will give it to you
Yes that he does
But I dont need to do all that for the purpose of concluding that the composition is C^r right?
Well see the example of x^3
Smooth bijections need not have differentiable inverses
But, so my argument is this. If "a" is a coordinate patch on manifold of class C^r, then, by definition, a from U to V and a^{-1} from V to U are C^r functions.
a o a^{-1} is the identity
The problem here is "a^{-1} from V to U is C^r" isn't obvious
You need to prove this fact
Wait
Oh right right... the definition of coordinate patch just has that the inverse is continuous not C^r. Soz soz
Uh, tbh I have no idea what you're trying to prove or what your definitions are
Regardless you showed me my error xD. I was trying to prove that if a1 and a0 are coordinate patches then the map a1^{-1} o a0 is C^r.
I see
In part B they claim that U ⋂ H^k+ is open in R^k. How can they claim this? For this to be open in R^k, both sets should be open in R^k. H^k+ is open in R^k by definition. However U is only open in H^k which doesn't mean that it is open in R^k.
The way I tried to resolve this was by taking U = A ⋂ H^k where A is open in R^k and then consider A ⋂ H^k_+.
U is open in H^k iff there is V open in R^k, s.t V \cap H^k = U. then U \cap H^k+ = V \cap (H^k \cap H^k+) = V \cap H^k+ which is open in R^k
oh nvm that is exactly what you did
so yeah, you are right
you can also argue that the boundary of U (in R^k) does intersect H^k+ only trivially, so U \cap H^k+ (in R^k) does not include its boundary as a subset
mátt:
that is on the 4th line of the proof
Cut down from r_1 to r_1/2
The closed ball of radius r_1/2 lives inside the open ball of radius r_1
also since #advanced-analysis is taken, how did rudin get (c) in this proof
actually dw figured it out
Does anyone have a smug idea for figuring out the following problem? I have N points distributed in space (known). I want to pick a percentage of those points and figure out what set of points is the most homogeneously distributed.
Using % * N amount of points
How do you measure how "homogeneously distributed" a set of points are? Is this space in R²? @swift flare
No R3. I am not sure how to define the homogeneousnous of a set of points. Basically I have a crystal lattice with hydrogens attached to it (it's a semi sphere, deformed because the crystal is very small). I want to be able to pick a % and then I want to calculate the set of hydrogens that maximizes the "spread"
So maybe I should maximize the st.dev between the points?
@small obsidian
That's a strategy. You could go with a least squares. But there's probably some intense physics that is used to actually predict what the system should look like
Hey please help me clear out a very stupid doubt that I have
I just studied about path homotopies, covering spaces and the fundamental group of a circle which i understanding the proof is isomorphic to Z
So intuitively i am thinking the generator path for the homotopy classes to be the single loop over the circle
Clockwise being negative and anti clockwise positive
And similarly x² is the double loop then triple and etc
So i tried to really see if I can't find a homotopy between f(x) = e^(i2πx) and g(x) = e^(i4πx) being the single and double loop respectively
So F(x,y) = e^(i2πx(y+1)) has F(x,0) = f(x) and F(x,1) = g(x)
And it is continuous
So i am thinking maybe my intuition is wrong? 🤔
For a path homotopy you would also need that for all y, F(0,y) = 1 = F(1,y)
sniped
Ah yes right
What makes a CW complex regular?
Token:
do you think that $(0, \frac{3}{4})$ is in the closure?
what
Token:
essentially
Token:
you don't need density
just metric stuff, take any point not in the closure and find an open ball around it that still fits
sure, but that just follows from regular metric stuff
first consider a point on any axis, that is not in the set and not the origin, then it's between $\frac{1}{n}$ and $\frac{1}{n+1}$ for some $n$
Lochverstärker:
then find some open ball and show that it also doesnt intersect that set in 2 dimensions
if your point is not on the axes, just project on both of them and do the same
then take the min of whatever epsilon balls you found
suppose the set of g-null vectors is a straight line through origin. How could i infer that the signature of g is one of either (++0) or (--0)?
is there any intuition behind a 'compact' set? Like I just went through the definition and theorems and I still don't know what to think when a 'compact' set is mentioned
Well, your intuition for euclidean space should be that a set is compact if and only if its closed and bounded
in a course on analysis in the euclidean setting, i dont think it makes sense to even introduce compactness because it doesnt differ from being closed and bounded and thus it just confuses people to think that the concepts are the same
some notes
- in the general topological setting the compact sets are somewhat small with respect to the topology
- in the metric setting compactness is equivalent to sequential compactness (i.e. every bounded sequence has a convergent subsequence)
- in the euclidean setting compactness reduces to just being closed and bounded
we want a property that is invariant under continuous maps, and here we notice that neither closedness or boundedness is preserved by continuous maps in general, im not sure of the motivation to distinguish compact sets in and sequentially compact sets in the general setting for i never outside of a topology class saw spaces which are just one but not the other
also one last thing i like to think is that compact sets are sort of a continuous case generalization of finite sets
that last line is interesting
That's a theme that's kind of a thing in math re compact = almost finite
But analysis is often taken by people who have reason to learn other math later where the distinction matters, so I'd rather not give people an impression that they have to unlearn later.
what if R was compact
you can have a 1(or)2 point compactification of R
I think presenting the open cover definition of compactness as the definition and proving that you have equivalent criteria shouldn't be inordinately difficult to anyone, so they're free to focus on sequential compactness and closed/bounded as they're comfortable with and just keep covers in the back of their mind until they reach a setting where things don't coincide
in my analysis course we did about the following:
-first semester, analysis over ℝ: only defined “compact interval”, as one of the form [a,b] with a,b∈ℝ
-second semester, we defined compact metric spaces as “a metric space X which satisfies any of the following equivalent conditions” (and proved equivalence); among these conditions were countable cover compactness, finite intersection property, sequential compactness and “every continuous function X→ℝ attains a max and a min”; we also showed that for X a subset of ℝⁿ, compactness of X as a metric space with the induced metric was equivalent to it being closed and bounded in ℝⁿ
fourth semester, in topology, we then defined compact topological spaces in generality
I've got a set O = [1,2] union {2} and I'm supposed to prove that {2} is open and closed in the relative topology of set O.
My first instinct would be to say that a point is closed and so that's easy to satisfy.
But being open is a bit more difficult. I read the example on the book Topology without tears and it didn't help me much.
A set A is open in the subspace topology if there is an open set U in the larger space with $A = O \cap U$
Liquid:
Let O be the following. Show that {2} is open and closed in the realtive topology of O. That's the wording from my exercise
Okay that's better
Yeah so showing 2 is open should be trivial now
You just need to find an open set which contains 2 and does not intersect [0, 1]
Open set here just means open in the standard topology on R
Hmm. If I'm choosing U, should everything within U be inside O or am I free to choose U = (1.5, 3) for example?
Ah thank you, this helps a lot
🐴
Does this rule work for examining if something is closed as well? For example, U = [1,3] to check if {1}U{2} is closed?
(the proof is like 1–2 lines that shoulnd’t be hard to find if you understand the definitions involved well)
it’s literally just repreated applications of definitions
precisely why its important to prove it instead of remembering the result as a "rule"
since it requires you to internalize the definitions
hmm
im trying to prove that a metric space is 2nd countable iff it is separable
ive shown that 2nd countable implies separable already, and ive made some decent process on separable implies 2nd countable, but im not quite sure where to go from here
im guessing i have to use the triangle inequality somehow but tbh im just not sure what to do
(pls ping if you have something)
You want to take q < r/2 essentially, this will imply that x \in B_{r/2}(y) and that B_{r/2}(y) \subseteq U by triangle inequality things

Take y such that y \in B_{r/2}(x)
Which of course implies that x \in B_{r/2}(y)
so all you have to do is show that B_{r/2}(y) \subseteq U
but you can show that B_{r/2}(y) \subseteq B_r(x)
That's where you use triangle inequality, if z \in B_{r/2}(y), then d(x,z) \leq d(x,y) + d(y,z) < r/2 + r/2 = r
So i'm trying to show that $0$ is the only limit point of $$E=\left{\frac1n: n\in\mathbb{N}^*\right}.$$ Suppose $x\in\mathbb{R}\setminus{0}$, and choose $\epsilon < \min{d(x,y): y\in E}$. Is it enough to say that $x$ is not a limit point of $E$ because $B_\epsilon (x)$ contains at most one point of $E$ (that is $x$ if $x\in E$)?
sexy minion:
@gritty widget no. You don't address 1. why the min{...} exists (i.e. u should take inf, and 2. why it should be >0.
I think the correct strategy is something like this:
- when x < 0. no limit points here obviously.
- x = 0 (is a limit point)
- when x > 0, you can find a positive integer n such that 1/(n+1) < x < 1/n... then carry on
right so then if $x\not\in E$, $$\left(\frac1{n+1}, \frac1n \right) \cap E = \varnothing$$
sexy minion:
and if $x\in E$, then $x=1/n$ for some $n\in \mathbb{N}^*$, $$\left(\frac1{n+1}, \frac1{n-1} \right)\cap E = \varnothing $$
sexy minion:
@little hemlock sorry for the late response
yep.
cool stuff ty
npnp
wait $$\left(\frac1{n+1}, \frac1{n-1} \right)\cap E \neq \varnothing$$ but it contains no other point of $E$ then $x$ so it's still fine
mart:
right.
not sure if its worth including for you, but existence of such an n depends on the archimedean property.
for any x>0 there is a positive integer n such that xn > 1
haha yep :p
ty for all the help n.n
np
A Portal Special Presentation- Geometric Unity: A First Look
did anyone watch the vid above?
any big-brained individuals in here? (grad+ level) that can talk about Weinstein's theory (I'm a noob myself and just wanted to know if it's good or not) (ping me)
weinstein simply hasn't given enough information about his model for it to critically be evaluated by anybody
his model hasn't made any predictions, it hasn't presented any falsifiable claims
it hasn't concretely explained what new novel statements it brings up
and just in general, weinstein hasn't done the intellectual burden it takes for scientists or mathematicians to respond to his proposal
we don't have a paper, we don't have predictions, we don't have suggestions for experiments, we don't have a concrete list of claims or of derivations or of proofs
all we have is a lecture series from a few years ago
what this translates to, in plain english, is: "don't bother worrying about weinstein's stuff"
for what it's worth, he's not a total nutcase or whatever - he's moderately good at math and physics
but his model is, as far as we can tell, empty sentiments and vague air
@gritty widget
his model hasn't made any predictions, it hasn't presented any falsifiable claims
@ivory dragon that's most of high end theoretical physics
most?
like string theory, loop quantum gravity, etc
i mean ok string theory but thats mostly because
string theory is so fucking broad
as a term it covers like 5000 different proposals
you cant falsify them all, but individual formulations can be (and have been) falsified
e.g. various string theories have made predictions about heavy ion collisions
which were later falsified
not that this matters to a mathematician
yap
which is why I asked my question in the first place
if there were mistakes in his theory
anyway the thing with string theory is
there's mountains of mathematics behind it
like thousands of papers
weinstein has published 0 papers
and 0 mathematics
and it's not like he's been rejected or covered up or whatever
as far as we can tell, he hasnt even tried
he presented a lecture series in oxford (iirc?) which he probably got via media connections
he does have a PhD in mathematical physics from Harvard
and that's the lump sum of what we know
yeah, as i said, he knows actual math
and he did, of course, publish papers during his thesis
he just hasnt published anything concrete from his "geometric unity" model
the string theory literature is full of back-and-forths
someone makes a paper proposing x addition to y model to resolve z problem
some other paper is published bringing up w issue and how simplifying x to x' can help eliminate that
sure
I'm guessing his intention was to give ideas to other people to work on because he himself doesn't have enough time to work on it further since he runs a company
anyway there are "fundamental" claims made by string theory
that WOULD falsify it
if disproven
for example, lorentz invariance
or negative cosmological curvature
disprove either of those and you've falsified all of string theory
admittedly, disproving those things is very very hard, but they are concrete claims backed up by mathematics
magnetic monopoles and coupling constant unification also come to mind
as for loop quantum gravity, that also makes falsifiable claims - for example, it predicts different hawking spectra than what we currently believe to be the case
which technically falls within the margin of error but
is very much on the edge
LQG also makes similar predictions to string theory, like lorentz invariance and quantum mechanical universe, etcetc
anyway, my honest advice is to not worry about weinstein's stuff, because there is nothing there to worry about
if you wanted to "study" weinstein's model
you'd be watching like, 8 talks on youtube
and then you'd run out of stuff to do
there's nothing else
on the bright side, i guess this reduces the workload significantly
the reason string theory and similar theories are attractive is because the mathematics works out very, very nicely (this has even provoked accusations of "they're just adding dimensions until the math works", which honestly, kinda has some truth to it). "geometric unity" makes sweeping claims about the mathematics, and it's not even unrealistic to see mathematical connections there
in fact, there are inklings of good ideas present IIRC
but it hasnt been fleshed out enough to really study or respond to
anyway, perhaps you're right that he was just "hoping to encourage others to look into it", but in that case the best thing a hobbyist interested in this stuff could do would be to learn alg geo, diff geo, and modern physics
since those provide the backdrops to weinstein's model
apparently Weinstein is on this server
@ivory dragon
also if you listen to his podcasts
he is pretty angry at the academic system in general
and he sees string theory as a completely failure
because it's been around for how long
40-50 years?
and so far it's still that same useless theory
also Weinstein's own theory is falsifiable
but he says he doesn't know how to build a system to prove it
so it's like the string theory situation

Taken from Joe Rogan Experience #1203:
https://www.youtube.com/watch?v=h8-6qcl7hLo
" What's shown? The pullback to S3 of a (partial) map of (spinning) planet Earth, via the Hopf fibration S3→S2, projected down to R3 by the stereographic projection. Much like the cheese wheel on the left, a wedge-shape of openning 80o is cut out of R3. The whole map of Earth can be seen on both sides of the cut (each in itself, a half-plane), with an 80o rotation between the sides. For improved visibility, the full pullbacks of only the G8 countries are actually shown, and only the pullbacks of Canada, Japan, and Italy are continued through the cut, in a translucent form."
someone pls cure my monkey brain:
show that a subset A of a topological space X is nowhere dense in X iff any non-empty open U of X has a non-empty open V subset U, with V cap A = null
nowhere dense means what ?
I feel like this is just a case of unfolding the definitions
i dont have a topology question per se
but how does one pronounce the X/A as in the quotient topology
like in abstract algebra that would be X mod A
oh
thanks
so the quotient space D^2/the boundary of D^2 is pronounced D^2 mod the boundary of D^2
how's this not a triangulation ?
it is ?
can some help me on a geometry test
It isn't my textbook / online notes say its not but not the reason
Might be one of those things which is a "delta complex" but not a simplicial complex
There are two edges between the same two vertices in the hole.
Officially in a simplicial complex an edge is determined uniquely by its vertices
it's because they meet on two different lines and the union of those lines is not a simplex
No it's pronounced S^3 lol
@gritty widget actually its S^2
Kogasa:
Is the complement of a relatively open set relatively closed?
by definition.
Really?
But using demorgan's laws you get the union of a closed set with the complement of the base set you're working with?
yes, and
?
ok, maybe its better to ask
how are you defining open sets and closed sets?
set is open iff complement is closed
I'm aware of topological definitions but this is in my MVC course
So im looking at that proof of f is continuous on the domain iff all preimages of open sets are rel open iff all preimages of closed sets are rel closed
and working on equivalence between the second two statements but from what you're saying it's a triviality?
Yeah it's a triviality
Ok I think I was assuming that because I had a union involved it couldn't be an intersection of an open set and the domain
which is obvs false
Preimage of all opens is open implies preimage of a complement of an open is the complement of an open
And vice versa
Yeah I knew this
Thing is I was going by our definition of relative open sets / relative closed sets
A in U is relatively open if there exists an open set O s.t. A is the intersection of O and U
analagous for relative closed
This is just the definition of continuity though
But sure, I think it's obvious that the complement of a relative open set is relative closed and vice versa
I don't see why you're having a problem with this
@unique wyvern
Because by demorgan's laws it's not immediately obvious?
Lol
IDK I like to prove stuff in ways that I'll remember
Take the open set O in the bigger space, take the complement
Yh
You get a closed set in the bigger space which intersects U to give you the complement
(here U is the subset whose topology we are looking at)
Well you can really have 2 definitions of rel closed sets
One definition is the complement of a rel open set
The other is the intersection of a closed set with your subspace
Both definitions are kind of trivially equivalent
I'm not sure what your definition of rel closed was
The latter
Oh ok
That's why I didnt find it immediately obvious
In that case what I said shows that the complement of a rel open set is rel closed
But if you know a bit about topology it should have been obvious tbh
I haven't done as much topology as I should have
Yh I've only recently caught up on definitions of topology
ie indiscrete and discrete topology
So its a rather new concept to me
khaled014z:
hmmm i'm not entirely sure if this is true but it feels like it should be correct:
let X be a topological space, A a subset of X. then any open set which intersects the closure of A also intersects A
wait nvm im literally dumb lol this is easy to show
its definitional almost
@sweet wing dont  me ur mean :(
me ur mean :(
How to approach this:
Show that the space of Weirstrass functions from R to itself is dense in C(R)
Yeah
Thanks
Anyone have a good computational geometry book
possibly focusing on higher dimensional spaces
I'm reading Vassiliev's Intro to Topology. In a couple of the problems/examples, Vassiliev refers to a topology on some set of matrices (e.g., $End(\mathbb{R}^2), GL_n(\mathbb{R}), O(n, \mathbb{R})$), but doesn't actually say what the topology is. My first expectation would be that they have the subspace topology inherited from the Euclidean metric on $Mat_n(\mathbb{R}) \cong \mathbb{R}^{n^2}$. Is this correct/reasonable, or is there some other natural topology that I'm missing?
refutations:
That's probably right, but there are a lot of other norms you can put on matrices
Like the operator norm that comes from them being linear operators, or the frobenius norm
But since this is a finite dimensional vector space, all metrics are equivalent so it's not a huge deal
you mean all norms are equivalent, all metrics are not
but you are right its not a huge deal because equivalent norms generate the same topology, you can prove this rather easily
Would someone be able to talk with me about the surface classification theorem? I kinda understand a simple proof of it but I wanted to be able to discuss it

Open in what topology? @bold merlin
Also was that in response to me? Like could I get help from you? @bitter yoke
just ask
my memory is fuzzy but I'll see what I remember and maybe someone else can help too
Do you know what the definition is of an open set is in the Euclidean topology?
Okk thank you!
So let F be a closed surface (2-manifold). The phrasing of the theorem I’ll try to get to is “F is either the connected sum a sphere with a finite number of tori or with a finite number of real projective planes” @bitter yoke
Ok so let F be a closed surface (2-manifold). The phrasing of the theorem I’ll try to get to is “F is either the connected sum a sphere with a finite number of tori or with a finite number of real projective planes”
Surgery can be performed along both orientable and non-orientable closed curves:
Let 𝛾 be a non-separating, orientable, closed curve on a closed surface F.
Construct the regular neighborhood N(𝛾 )= 𝛾 x[0,1]. N(𝛾 ) is the belt region of a 2 handle H in E3
Perform surgery on F by cutting out N(𝛾) and gluing in the attaching region of H into F so each of the two disks fill the two holes made in F. Two faces were added, so the Euler number of F increases by 2 after surgery along an orientable curve.
Let Ψ be a non-separating, non-orientable, closed curve on a surface F.
Construct the regular neighborhood N(Ψ )= 𝛾 x[0,1] with the antipodal identification. N(Ψ ) is a möbius strip.
Perform surgery on F by cutting out N(Ψ) and gluing a disk in F to fill the hole made in F. One face was added. So the Euler number of F increases by 1 after surgery along a non-orientable curve.
Consider the following algorithm:
Begin by asking if the surface contains a non-separating closed curve
If yes, perform surgery and then loop back to the first question
If no, then F is S2 by the Jordan curve theorem
The algorithm must terminate in a finite number of steps as performing surgery only increases the Euler number (by 1 or by 2) and S2 has a [finite] Euler number of 2. Therefore every surface is the connected sum of a sphere with a finite number 2 handles and disks replaced by mobius strips.
A disk replaced by a mobius strip is a real projective plane and adding a 2 handle to a sphere creates a torus, so every surface is the connected sum of a sphere and a finite number of tori and real projective planes. The connected sum of a torus and a real projective plane is the connected sum of three real projective planes, so every surface is either the connected sum of a finite number of tori or real projective planes.
Could someone critique my understanding of the proof?
It looks okay to me, but someone better at this stuff should probably take a look
<@&681259184582688842>
I think it’s correct in principle, but I’m worried about detail stuff
whats the difference between a map and its image? for example the differentiable curve $ \alpha : R \mapsto R^{3} $ , say the map alpha is smooth, the curve can have corners, such as the 'cusp' at the origin, and that is not smooth overall, so im confused
khaled014z:
strictly speaking a curve is the map but often one calls the image a curve
the curve you linked is not smooth because the map is not smooth at the origin
curve you linked is not smooth
it can be parametrized by a smooth curve
usually you require the curve to be regular, that is, alpha'(t) != 0 for all t
then you can parametrize it by arclength and then the image does indeed look smooth
ah yeah my bad it is actually smooth you are right its the regularity
how can I know if a curve is not smooth at a point where the derivative is zero?
like the constant curve has derivative zero everywhere and intuitively it is smooth but according to this paragraph, all the points t are singular
smoothness doesnt require existence of the tangent line, as sonja said its the regularity (i.e. nowhere singular) that makes the curve "appear" smooth because (in this case the tangent vector varies continuously)
smoothness of the map i dont think you can determine based on the image, you have to check the coordinates are smooth functions, i.e. the map has continuous derivatives of all orders
oh my god
so say i have a map that has continuous derivatives of all orders
i conclude that it is smooth
but the image does not 'appear' smooth
the curve has to be regular so that the image has to 'appear' smooth
is that right?
if thats right then why attach a meaningless 'smoothness' criterion for the map itself and not the image
since the image determines the actual geometric structure?
the smoothness criterion is more important its just unfortunate for intuition that an image of a smooth map can appear not smooth
we cant really make a complete theory out of "smooth images" but out of smooth maps we can
also one point to make is that when you compare to maps from R to R, you have this intuition that the graph appears smooth, this intuition carries over
if you graph on R^3 the graph of the map t -> (t^2, t^3) that you linked the image of earlier you get a smooth looking curve even if the image has a cusp at the origin
compare to your earlier image
how do you graph that on R3?
graph is defined as the set of points (t, f(t))
so in this case you graph (t, t^2, t^3)
oh so just treat f(t) as 2 separate numbers
okay
i will try that out
thank you for your help
no problem
I have two 3-sphere hyperspherical coordinates as in (r,ψ, θ, φ) and I want to find the great circle distance between them. I understand I have to derive this from the law of cosines, but I'm kind of stumped. Anyone want to help?
In my case r is always 1, unit length.
I would just convert to cartesian coordinates and measure the angle between the two points from the origin
so i'm trying to prove that every point of an open set $E$ in $\mathbb{R}^2$ is a limit point of $E$. Since $E$ is open, every $x\in E$ has some $\varepsilon > 0$ so that $B^\varepsilon (x)\subset E$. Take $\delta>\varepsilon$. Then $B\varepsilon^ (x)\subset B^\delta(x)$, so $B\delta^ (x)\cap E \neq 0$. Take $0>\delta>\varepsilon$. Then $B_\delta^* (x)\subset B_\varepsilon^* (x)$, so $B_\delta^* (x)\cap E \neq 0$.
mart:
is this enough?
0 > delta > epsilon looks suspicious
what's your definition of limit point
like open ball of arbitrary size around the point always contains another point
$x$ is a limit point of $E$ if $\forall \varepsilon > 0: B_\varepsilon^* (x)\cap E\neq 0$.
mart:
what's * mean, open ball of radius epsilon I assume
punctured epsilon ball around x
oh ok
I don't get what you're doing, seems like you do too much
Once you start taking delta > epsilon is where I get lost, why not just stop there and use B*_epsilon
what's the extra larger punctured ball for?
@gritty widget you still there?
sorry omg
so i know that each $x\in E$ is an interior point of $E$, that means there exists some $\varepsilon>0$ so that $B^\varepsilon (x)\subset E$. Then I have to show that $x$ is a limit point of $E$, that is \textbf{for every} $\delta > 0, B\delta^ (x)\cap E\neq 0$.
mart:
@chrome dew
yeah set epsilon = delta
what about when delta > epsilon
well the intersection of those two would be the smaller one
so that's why I ignored it
ok ty n.n
I guess I'm taking the "there exists some epsilon" to mean
there's one fixed one, and we get all smaller epsilon for free
but you're making delta do that separately
maybe I'm just sloppy about how I'm doing it lol
do you also have to prove or explain that the punctured disks are nonempty
or is that just obvious in R^2 that it doesn't matter
I guess literally average the punctured point and a point on the radius if you need to show the specific existence of a point
why not just go epsilon/2 in any direction (say, up, or to the right) from x
oh, this is a really old discussion
Hi, im wondering if someone could help me understand and solve some problems in differential topology?
I have a 2-form defined on R^2-{origo} and a two dimensional manifold in R^3 that is an oriented, im suppose to show that the restriction of this form to my manifold is equal to a given expression. However we are given a hint and it feels like the hint is the entire solution, so i dont get it.
Can someone explain how donut equal ONE COFFIS CUP.
question of our times
Almost as good as "Where will Estonia go with category theory?"
I think he truly do be wanting to know how that donut be a coffis cup though.
I forgot where namington found this
lol
it was some cranky medium article
about how functional programming "got it wrong"

Any good books on synthetic geometry?
try Elementary Synthetic Geometry (Classic Reprint)?
what is this?
does he mean that e1 is tangent to the line v=v0?
so e1 has the same direction of the line v=v0 , so it is tangent
or is it something more
NotWeird thanks
No one explained how donut=one coffee please so I just am confused about.
Hint: imagine they're made of rubber
Ahoy. Let [A \in \mathbb{R}^{3\times3}] be nonsingular and [E = {y | Ax = y , x^Tx = 1}]. Im trying to prove E is an ellipsoid and I'd like a hint. I know I can do it myself I just seem to be lacking good ideas.
RamJam413:
Basically A(S^2) = E is an ellipsoid. I wanna use x^Tx = 1 and get the formula for an ellipse out of it but it isnt clicking
x^Tx
Is the dot product of x with itself and can instead the condition can be expressed as:
|x|² = 1
x is a vector on the unit sphere, Ax is a linear deformation of the unit sphere @limpid pine
If instead A were a 2×2, that would instead be a linear deformation on the unit circle
Right. I believe I am on board with everything you've just described. I even intuitively understand why the ellipsoid's principal axis are scaled by the singular values and in the direction of i believe the left singular vectors. I just cant seem to get the formula for an ellipse out of this information thus far
can you get the equation of a circle
is it true that a closed curve with rotational index of -1 has to be simple?
Hellooo
I need a help for an exercise of differential topoligy
I have to prove that every n-smoth manifold is contained in a n+1 oriented smooth manifold
Help me please xD
Look I am friendly I swear
Im just want to know why coffee cup = one doughnis
I ned one explain form topologist
Im just want to know why coffee cup = one doughnis
@pine heath Because this 2 object as the topological point of view is the same thing (have the same homology group)
Thank you.
Hello, in showing that a sphere is a regular surface, we divided it into 6 parts to cover the sphere, so we showed that each part is a regular surface, but how do we know that by covering the sphere with each individual map that the sphere is a whole is a regular surface? Is the union of regular surfaces a regular surface?
@knotty pasture no
An example of the map x and the set U
@knotty pasture no
@dim meadow sorry, what no?
what you said is bad
what you said is bad
@dim meadow ?
having the same homology groups is not the same as the same from a topological pov
@pine heath please ask a more detailed question or watch an example on youtube, i am friendly too i swear.
@loud scarab the definition of a regular surface is that around each point there is an open nbd with certain properties
so in order to show a surface is regular you have to cover it with regular patches
open in the standard topology of R3 am I correct?
hmm I still dont know what a manifold is unfortunately
but what does 'cover' it with regular patches mean
where is this piece in the definiton
that the union of the regular patches is the whole surface
im trying to show that the union of the regular patches == regular surface
but then what is 'regular' patches
oh
cuz im using something not defined to define something that needs that something
you're trying to show that the union of the patches you have is S^2?
yes
well
the union is obviously S2
im trying to show that S2 is regular
by combining the patches
each patch is regular
by the definition
what gives me the right to combine the patches and claim that the union is regular
am I making sense?
I used this to prove that each patch I have is regular
lmao
x given its properties and the differential ofcourse
so you are basically done then
oh okay im retarded
yes
lmao
in my opinion, i am retarded
having the same homology groups is not the same as the same from a topological pov
@dim meadow yes, you're right, it was a mistake born from my wrong idea. You have an example of a pair of topological space with the same H_n sequences that aren't isomorphic? And in the category of smoth manifolds?
I have to prove that every n-smoth manifold is contained in a n+1 oriented smooth manifold
@knotty pasture i up my previous question
and this? "I have to prove that every n-smoth manifold is contained in a n+1 oriented smooth manifold" Nobody have idea?
I'm supposed to prove that this is continuous. The example I'm being given is of a proog that f(x) = sqrt(x) is continuous and it's proven with the use of I_a and I_b. I fail to see the connection here
Ah I think I got it.
Hello. Still struggling with the damn ellipsoid. Here is my thinking thus far.
Let (A \in \mathbb{R}^{3\times 3} ) be nonsingular and (E = {y| y = Ax , x^Tx = 1}). So E is the ellipsoid of A, the image of the unit circle under A.
The SVD of A, (A = P\Sigma Q^T\ = p_1\sigma_1q_1^T + ... + p_3\sigma_3q_3^T) gives me (Ax = p_1\sigma_1q_1^Tx_1 + ... + p_3\sigma_3q_3^Tx_3)
and thus ((Ax)^TAx = q_1p_1^Tp_1\sigma_1^2q_1^Tx_1^2 + ... + q_3p_3^Tp_3\sigma_3^2q_3^Tx_3^2 = \sigma_1^2x_1^2 + \sigma_2^2x_2^2 + \sigma_3^2x_3^2)
Which I can feel is really close, but I need to scale it equal to 1, and I probably made some mistake that pulls the bottom out somewhere, and idk. Does someone know where to go from here?
RamJam413:
@small obsidian
I know
(x_1^2 + x_2^2 + x_3^2 = x^Tx = 1) and (\sigma_1^2x_1^2 + \sigma_2^2x_2^2 + \sigma_3^2x_3^2 = (Ax)^TAx). I wanna say ((Ax)^TAx = |A|_2^2) because x is unit length but from there I am just not able to click it into the ellipsoid formula. I must be missing something obvious
RamJam413:
so in the definition of a regular surface, there's a condition that the parametrization be a homeomorphism between an open set in R2 and an open set of R3 intersected with the surface
and in order for x to be a homeomorphism, not only does it have to be one-to-one, but also onto, but how is it in this case x: U --> R3 is onto? if I pick an arbitrary point of R3, it certainly need not be an image of x, right?
I highlighted the part where he mentions an inverse without first checking that x has an inverse, how does it follow here that x has an inverse?
The only way I can see this resolved is that if x is an imbedding of U in R3
not sure if that's the case though.
it needs to be surjective not onto that open set, but onto the open set intersected with the surface
the inverse is also only defined on that surface
oh well then I guess the notation should be $x: U \mapsto V \cap S$ where V is open in $\mathbb{R^{3}}$ and $S$ is the surface so now surjectivity makes sense
khaled014z:
Hello all i have a qeustion
I need to find 24 points evenly spaced around a circle where the ceneter of the circle is 0,0 and the radius is 33
I have no idea how to do this im no math man
@digital anchor this isn't an appropriate place to post this, go to #geometry-and-trigonometry
ah
Is anybody familiar with Geometric Algebra (clifford) ? I've read literally every single google/duckduckgo result on Geometric Algebra and Clifford Algebra and I still don't get it
Just ask about what you're confused about
Well some basic things. Can you divide by non scalers/pseudoscalers, Ect can you divide by Vectors/Bivectors in say (3,0) space (or pick a space that would be easier)?
No I think you can now that I think about it. It's just the inverse of multiplication. I got some better questions
Can you take the square root of Vector/Bivector in say (3,0) space. Even if it won't be unique . Can you even take non integer powers? Or raise to a non scaler?
dude i trully want to help you but i dont understand i am not used to do mathematics in english sorry
does what you want to know have matrices?
No. Geometric Algebra is funny in that Matrices are totally optional.
I've read literally every single resource on this. And I can't find anything confirming or denying the square roots thing.
It's supposed to be an alternative framework.
I'm not expecting you to know but I'm hoping someone would be familiar with the subject.
<@&681259184582688842>
I have no idea what this even has to do with Topology besides being requested to post here
@bitter yoke i study early topology and i dont see anything related to it
all i can seeis the space is maybe a NORME (it's what we call it in my country)
This is the topology and geometry channel, we don't have a geometry tag, but most people who have the topology tag know geometry too
i should study geometry now but with coronavirus...
Will a problem ever call for taking a square root of something I can't take?
If so, what do I do then?
[if you are, you can explain why it's "impossible" i guess]
[i.e. "noninteger powers are not defined on this algebra because suchandsuchreason" or whatever]
[but such questions will usually be phrased as "If possible, compute ...." or whatever]
i dont think at this lvl you wll have this kind of a situation
But wait isn't using Euler's formula a 'non-integer' power. And isn't its use necessary for Geometric (clifford) Algebra?
Where exactly would it make sense?
Anywhere I can find more resources on clifford algebras that isn't just a google search away (Since I have everything there)
where's all the so called 'math material' anyway all I find is 'physics materials'
well, clifford algebras arent a particularly popular subject amongst mathematicians - they're often considered "full of unnecessary structure"
you originally said you were stuck at learning line integrals and started trying to learn clifford algebra to get a second perspective
that said, there are some math-focused texts
I suggest not doing that
lol
just focus on learning multivariable calculus and ask questions on that in #multivariable-calculus instead
I think that's more the level you're at right now
Porteous? What level is Clifford Algebra?
it's like, not very mainstream version of differential geometry and tensor calculus sorta stuff that you're not ready for yet
most mathematical resources i'm aware of assume you know basic diff geo
and a couple semesters of group theory
universal algebra is helpful too
you mean major maths lvl ?
But Hestenes says he wants to teach it to people right away.
hestenes' viewpoint is very fringe
it's not necessarily wrong
but it doesnt have widespread adoption
in any case, he proposes it as a replacement for linear algebra
but in particular, the linear algebraic parts are
bsasically unchanged
maybe some words are swapped but thats about it
so it wouldnt really present an "alternate perspective"
if youre just working with calculus over R^n and C^n lmao
like using quaternions is cute, but it's kind of a waste of time when you have linear algebra
it's just more cumbersome in my experience trying to use any clifford algebra
no real reason to use it as far as I'm aware, but I'm pretty ignorant
anyway, instead of trying to learn a 2-semester course in pure mathematics to eventually develop enough theory to maybe gain an "alternate perspective" that may or may not be insightful and doesn't really have many resources available (nor, in all likelihood, acceptance by your prof or TAs)
why not just practice more line integrals?
I will say I think there is an appeal to thinking of the whole wedge product/bivectors thing instead of cross products intuitively speaking
That too.