#help-with-linux-sbcs
1 messages · Page 1 of 1 (latest)
To clarrify, the leds dont all need to be independantly controlled, will it work if i just connect multiple led and resistor pairs
Yes, that will work, as long as you don't exceed the current capacity of the GPIO.
What would that be exactly
It looks like the RP2040 pins have selectable drive strengths from 2 to 12mA.
Hello, I have custom PCB with RP2040, the USB works in bootloader mode, flash of firmware works good (when I dump it is OK), but after testing the hello world USB, there is no USB activity. Any ideas? Eventually, can bootloader USB mode work without external oscillator?
I don’t think the rp2040 has a internal oscillator
according to the datasheet, it does, but i'm not sure it's stable enough for clocking USB (maybe low-speed only?)
According to the datasheet, you need the external osc to enable USB, it's how USB PLL is fed
as far as I am aware, there is no way to enable USB with the internal osc
ah, ok. ATmega32U4 has an internal oscillator that can be used for low-speed USB only
It's a point of ire among people who are used to using the SAMD21 and getting USB with minimal components
SAMD21 from what I understand use USB timing to calibrate the internal osc
no idea if it's the same on the 32u4
heh. "the host has to have a more stable clock than we do; let's use that!"
basically lol
the 32u4 doesn't automatically calibrate its internal oscillator from the USB timing, but you could probably write firmware that did
BTW, the issue was bootloader second stage had issues to init SPI Flash
#define PICO_BOOT_STAGE2_CHOOSE_GENERIC_03H 1
#ifndef PICO_FLASH_SPI_CLKDIV
#define PICO_FLASH_SPI_CLKDIV 2
#endif
Could I use this for a pi? it's meant for an arduino, and I don't care for the touch, but it's the only affordable 3.0" lcd I could find

Pinout

While you “could” you would have to write a library to use it with the raspberry pi so I wouldn’t recommend it
Understood
There is a C library here https://github.com/nopnop2002/Raspberry-ili9325 which would be a good starting point
GitHub
Parallel TFT Shield Library for wiringPi. Contribute to nopnop2002/Raspberry-ili9325 development by creating an account on GitHub.
how i create a ap local host with a pico w?
No worries, found the perfect library for my purposes, I'll post it here if anyone needs it: https://github.com/juj/fbcp-ili9341
It's meant for the ili9341 tho, but it does have other drivers supported too
GitHub
A blazing fast display driver for SPI-based LCD displays for Raspberry Pi A, B, 2, 3, 4 and Zero - GitHub - juj/fbcp-ili9341: A blazing fast display driver for SPI-based LCD displays for Raspberry ...


Can I wire up that sd card breakout board to these pins to relocate the main sd card reader?

There's also a simpler pcb with less resistors, not sure why and how they differ

you need a breakout that shows the SDIO pins
here is one: https://adafru.it/4682

Micro SD cards and microcontrollers go together like micro-peanutbutter-and-jelly: SD cards are inexpensive, durable, easy to find at any shop, come in many sizes and can plug into any ...
i can't think of a reason it won't work if you use the SDIO breakout
or you could use https://adafru.it/3688

Stop fiddling with SD card sockets in the back of your latest gadget, and streeeeeeeeeetch out with a Micro SD Card Extender . This simple, but effective device gives you a long ...
1M. I found an application for my PC called MOBAXTERM something like that which allows me to connect to my PI over wifi instead of cable. am loving it!! but i need to shut down my HDMI and make something to let me reconnect to hdmi incase if wifi crashes. or does the pi detects that hdmi cable is unplugged and boosts his performance?
This is just a comment, rather than a question, but someone might want to update the library documentation or the implementation guide for the LIS3MDL breakout - Python/Circuitpython. there is a note on the Arduino guide about a known issue that is resolved by grounding the A0 pin (or pulling high, I guess). It appears this also applies to Python/CircuitPython as it appears to be a hardware issue. Some functions communicate correctly with the sensor, while some do not. The sensor also appears to change I2c addresses from the perspective of the OS (outside of python). This was resolved for me by either grounding or pulling the A0 pin high (and thus fixing the address to either 0x1c or 0x1e)
does your breakout look like the one with the STEMMA connectors here: https://learn.adafruit.com/lis3mdl-triple-axis-magnetometer
I will ask about that. It looks like there's a pulldown on the pin already, but there may be some further issue
this is the AD1 jumper on the back, right? Did you short the jumper, or connect one end directly to GND?
Hey guys! I'm looking to buy a Pico W and get it working with circuit python for Arducam functionality, does circuit python have support for the Pico W?
Looking at circuitpython.org I don't believe it currently does
shoot, thank you for the quick response though!
i think this is the relevant issue fwiw:
https://github.com/adafruit/circuitpython/issues/6558
I have two, one with the jumper soldered and one without. Neither works appropriately using only the jumper. They appear as the "correct" address initially upon bootup (tried with 3 SBCs of different manufacturers" and then later switch to a different address. simple functions like reading out the data rate work, but I could not get mag readings on either. Setting the D0 external pin either to ground or pulled high to the logic voltage worked to set a stable I2C address on both that would work for all library functions
thanks - I have asked internally about the details of this and am awaiting an answer. In any case, thanks for your report, and we'll try to make the guide better
...
ok, I see this person had trouble too, and notes that with the 10k pulldown on the address pin, the actual voltage measured there is about 1.2v, not great: https://forums.adafruit.com/viewtopic.php?f=19&p=856682#p854887
Datasheet says: When I2C or 3-wire SPI is used, the SDO/SA1 in must be connected to Vdd_IO or GND. I will note this in the guide in both sections and in the pinout section.
Awesome. Yeah, I saw the note in the Arduino/C++ guide and decided to try that to fix the address rather than relying on the jumper, and it solved the problem.
Hi I am trying to make a game console with the pi 4 but In order to make it fit I need to desolder the USB ports on the pi. Is there a good way to do this?
The best way would be with a hot-air gun, I'd say.
Thank you. Can this wire directly into the main SD card reader? What is the pinout on the pi?
I know that, but, what do I wire each pin to? Not all are obvious
I just realised the board I found was spi. From what I can tell, there's only one sdio board in my country website
To anyone who has been considering a CrowPi L (Raspberry Pi laptop) and think you can just use the pins with regular devices like the Sensor HAT think again. After speaking back and forth to Elecrow, even after they created an adapter, they have finally decided to tell me that there are pins disabled.
"Allow me to explain, when designing CrowPi L, several pins are disabled: 4, 6, 17, 39. Because if these power pins are plugged in incorrectly, it'll be easy to burn Raspberry Pi."
This makes this device useless to me so I'll be returning mine.

here is a link to one on adafruit https://adafru.it/4682
Micro SD cards and microcontrollers go together like micro-peanutbutter-and-jelly: SD cards are inexpensive, durable, easy to find at any shop, come in many sizes and can plug into any ...
the pins are disabled to protect the pi
I've seen it, but I don't want to order from overseas, I live in asia and the shipping is usually overly expensive. I can't seem to find that model here sadly
I have a question tho
?
what is it?
https://www.youtube.com/watch?v=uZBYOqfhCSo&t=370s
At about 0:24, he explains how he did it, he didn't seem to use a conventional card reader with an interface, instead he practically directly soldered a Micro SD card to SD card reader directly to the Pi's back things that I showed before

Follow what I’m up to between videos on Instagram! https://www.instagram.com/sudomod_wermy/
Want to help support future projects? Buy me a coffee! https://buymeacoff.ee/NcFE38xiO
See what other sudomodders are up to in the forums! https://sudomod.com/forum/
Written guide:
http://sudomod.com/game-boy-zero-guide-part-5/
Enter to win the one I'...
Why did it work for him?
What he is doing is what I am trying to do as well, however I was having trouble with the pins
wym
He is basically relocating the sd card reader to a game boy cartridge slot
he isn't booting the pi from that sd card
it's on the gpio and the pi can't boot from an sd card on gpio
Oh, are you aware of this project?
Oof
pulled the L button pad right off
How does his work, since those are adapters, no?
wait i was wrong
About?
he is booting the sd card from the cartridge using the pins on the bottom
do you have a microsd to sd adapter?
I might, I have to look for it or buy one
you won't need the breakout then
just solder to the pins on the adapter like wermy did
Oki!
I have a CRICKIT HAT (product 3957) and have it on a Raspberry Pi 4. If I try to use power from the CRICKIT, it will not boot. If I provide USB power to the Pi 4 and the CRICKIT, I can get it to boot. Is there something I can do to provide power to the Pi from the CRICKIT? Should I use a Pi 4 with the CRICKIT or is it better to stick with the Pi 3?
what power input are you using on the HAT?
make sure it's the barrel connector
the HAT should be able to back power the pi
I am using Product ID: 1466 (5V, 4A) with a barrel connector. Thanks
Hello, please, is anyone there who have experience with RP2040's PIO ?
Post your questions and any code you have. You’ll get help faster 🙂
@humble marsh mentioning you as well since you created the library and might have some insights on this too. I am working on a project that uses a RPi Pico W and an LCD. The LCD I'm using (PFC8574) requires 5V. From everything I've read about the Pico you can basically use VBUS or VSYS pin for 5V when powered from USB. When displaying simple text on the LCD it's getting garbled. I send "This is a test" and on the LCD it shows "Thisa te". Sometimes running the same code results in strange characters randomly placed on the screen. I think it's due to voltage as I have 2 of these LCDs and they both do the same thing so I'm wondering if I need to add an external power supply to the project. Anyone else run across this? And here's the code: from lcd.lcd import LCD, LCD_BACKLIGHT, LCD_NOBACKLIGHT
from lcd.i2c_pcf8574_interface import I2CPCF8574Interface
from lcd.lcd import CursorMode
import busio
import board
Here we will build an interface for the supported display
i2c = busio.I2C(board.GP27, board.GP26)
lcd = LCD(I2CPCF8574Interface(i2c, 0x27), 4, 20)
lcd.clear()
lcd.set_cursor_mode(CursorMode.HIDE)
lcd.print("This is a test")
hmm..seems like that should work. what's your indication that the pi does not boot?
I have it hooked to keyboard and monitor and I do not get anything other possibly a flash as it powers on. Also,no light on the Pi
anything special about how the crickit is attached to the pi? or is it just like this?
https://learn.adafruit.com/assets/67677
It is like that. I have buttons hooked to 4 of the IO pins and LED lights wired up to 4 of the PWM (technically wired, but no buttons or lights connected at the other end).
when you power both so the pi boots, does the crickit then work ok?
Yes, as long as I put power to the Pi first, I am able to plug in the CRICKIT and it operates just fine.
not sure what's up. would you mind posting this in the forums so we can work it there?
Absolutely! Thank you for your help
np. can ping me with link to post and i'll follow up there. thanks!
Anyone know if I could use a Nintendo DS Lite screen for a Raspberri Pi? I have no idea what kind of screen it is for now
Nevermind, seems to be a 45 pin thing, probably proprietary like most Nintendo stuff

Hi, so new to all this but I'm looking at this guide https://learn.adafruit.com/reading-a-analog-in-and-controlling-audio-volume-with-the-raspberry-pi?view=all and in the guide it shows wiring up a potentiometer to one of the channels
So I'm wondering if I say wire up another potentiometer and put it on channel two, how would the raspberry pi differentiate between the two signals?
Also would the wiring and everything pretty much be the same for say a 16 channel one like this one? https://www.mouser.com/datasheet/2/256/MAX11120-MAX11128-217961.pdf
Lastly in the guide there's code and it says at the top import adafruit_mcp3xxx.mcp3008 as MCP I don't really know where to look but is there a library for the 16 channel max111xx chip?

Adafruit Learning System
Convert analog inputs to digital and control audio volume
the pi doesn't differentiate. the MCP3008 does.
the pi talks to the the MCP3008 over SPI
so the pi would say like "give me the value on channel 0", etc.
the basic wiring that's being done is what's called a "voltage divider" - can google that for tons of info. it's a generic thing, so, yep, could be used with other ADC's
I see, but would I need a library to use another ADC though?
yep
I'm not able to find a library for the MAX11128 chip
yep. i'm not aware of one either. would need to search around.
the MAX appears to be SPI based, so, in theory, could work
do you need more channels?
I don't really know anything about this kind of stuff but I was looking at mouser and found that MAX chip, it'd be cheaper to use that then use two MCPs
Yeah, 16
Do you know of a chip that has a library for it that's cheap?
SPI allows for multiple devices
SCLK/MOSI/MISO pins get shared
and then each device needs its own CS pin
so, yes, could use two MCP3008's
I see, but it'd still need a library so I can't use the MAX right?
correct. that'd be true in general. for any given device, need a library to support.
Also on the guide it says those pins but I'm thinking about using a pi pico and on it's pinout it doesn't show SCLK, MOSI, or MISO https://datasheets.raspberrypi.com/pico/Pico-R3-A4-Pinout.pdf
Am I correct at least that SCK means SCLK?
they're DIN and DOUT in the MAX datasheet for example
The guide says MISO is DOUT and MOSI is DIN
I mean like uh where do I connect those to the pi pico?
Yeah on the datasheet I can see that it says DIN and DOUT, but I can't find that on the pi pico

If I had to guess TX is transmit so that's DOUT and RX is receive so DIN?
TX and RX
^^ SPI pin naming has a bit of a history to it
pico SPIx_TX would be out of the pico (i.e. MOSI)
RX would be in (i.e. MISO)
Oh I see
Wait, if TX is out of the pico, why's it called DIN?
I'd assume since it has IN, it well means in?
Sorry for all the questions, all this stuff is confusing to me
.<
where are u seeing DIN?
OHHH
I see it now
MCP3008 DIN -> MOSI (white)
It's DIN on the MCP side
So TX out of the pico and into the DIN side of the MCP
yep. think in relative terms. relative to the device with the name.
the TX/RX nomenclature is very confusing
Ahh
Oh, also would it break anything if I got those two mixed up?
Like by accedent?
I'd assume it just won't work right?
yep. most likely.
it helps to understand SPI in general
then you just go with the flow on all the different names
Would you happen to know if I'd still be able to program the pico if I use one of these?

*Note: Does not support OTG connections such as memory sticks, external hard drives, keyboard or mouse. USB C to Micro USB Adapter The adapter from JXMOX lets you use your existing USB-C cables for charging and syncing your Micro USB devices, without the need to carry an extra Micro USB cable wit...
Not sure if they only pass through power or both power and data?
cause u only have USB C cables?
Ye, I'm gonna have to do more research on all of this
XD
Well no, it's just that I'd rather use usb c
hopefully they'd just work. but USB C has some fancy features that can sometimes cause hiccups.
most likely, they'd just work though
I see, so basically would a safer bet be this?
What a cutie pie! Or is it... a QT Py? This diminutive dev board comes with one of our new favorite chip, the RP2040. It's been made famous in the new Raspberry Pi Pico and our ...
Only issue is that it'd be double the price of a pico + adapter though
Trying to limit the amount of money I'd waste if I break something
XD
Well I don't think the adapter would break anything, it's mainly soldering onto the pads and ruining a $4 board verses a $10 board
yep. and the qt py breaks out fewer pins of the RP2040.
but it has a reset button and stemma connector
and the pins are actually labeled 🙂
trade offs
Yeaa
But it does have enough pins to use two MCPs right?
Each takes four so I'd need eight?
something like that

Whoaaa
that's just the SPI pins
I didn't know you could share the yellow blue and green pins
Thought they had to be seperate
XD
Also
How'd you make that?
fritzing
the orange/white wires are the "chip select" (CS) wires
those are the ones that needs to be unique
and can be any available GPIO (digital) pin
Oh, that's neat
nothing special about using A0/A1
on the software side, the CS pin is one of the parameters used when setting up the MCP:
https://github.com/adafruit/Adafruit_CircuitPython_MCP3xxx/blob/93bd5c833863ce0517d8e9bbbe0ea89768e483ef/examples/mcp3xxx_mcp3008_single_ended_simpletest.py#L17
two MCP's would look something like:
mcp1 = MCP.MCP3008(spi, board.A0)
mcp2 = MCP.MCP3008(spi, board.A1)
Alright, think I've got it now
Also, by chance would you know how to wire load cells?
if it's a basic bridge type load cell, can use this:
https://www.adafruit.com/product/4538
It'd be these

This load sensor, sometimes called a strain gauge, is the same one found in digital bathroom scales (you know, the ones you use in January for your New Yea
So currently the plan is to use four of them on each corner, going to an LM324 (I think that's what that amplifier chip is called) then go to the MCP3008
I'm wondering if I can somehow average the signal of all four sensors so I can use one channel instead of four rather then have the pico average it internally
If that can be done I think I could get by with only using a single LM324 and an MCP3004
that one is only 3 wires. a little different.
but looks like SF has a good write up about it, and load cells in general
Ohh
So it seems like I have to use something like this https://www.sparkfun.com/products/13878

The SparkFun Load Sensor Combinator is a bare PCB that combines four load sensors into a standard four-wire [Wheatstone bridge configuration](http://en.wik
I thought it would have been as simple as putting the wires in parallel
XD
Huh
Wait a minute
Get that, put the output to the LM324, now amplified, go straight through to the adafruit pico???
Would that make it so that I'd only need one channel now?
sounds you're basically wanting to do this?
https://cdn.sparkfun.com/assets/learn_tutorials/5/4/6/SparkFun_Wheatstone_Bridge_Load_Sensor_HX711_bb_Fritzing.jpg
don't need the actual load values from the individual load cells?
Actually yeah
Nope, I don't think I do, average should work just fine
The only difference is that instead of using that load cell amp it'd be with one of these
Well apparently I'm sending links too fast but it's the datasheet for the LM324
.<
is using the LM324 a requirement?
Noap, but it's cheap and I need four channels still for it, as I plan to use multiple load cells in pairs of four, so 16 load cells in total
So it's be four load cells -> combinator -> one of the channels to the LM324 -> then going straight to the ADC of the adafruit pico
So from my research the regular pico only has three usable ADCs but the adafruit pico has four of them
Only other question I have is how to figure out how to combine the 12 wires of the four load sensors into four wires without the combinator
It seems like it's just a bare pcb with no chips on it so I assume there's a way to do it but the board just makes it neater?
If I'm reading that right, would E+ be positive, then E- be negative, then A- and A+ would go to pin two and three respectively on the LM324 to which pin one would go to one of the qt rp4020's ADC pins?
I think you would need a resistor feedback network on the op-amp as well to define what gain and offset it is providing to the load-cell inputs, and then the resulting output (which is now in a good voltage range) would go to an ADC pin.
From the research I've done, I think a one mohm resistor should do the trick and get like a 200x gain?
Though I'm still kinda unsure if that's correct and how it works
Uh, worse thing that can happen is that if it's too low is that I'll lose precision (though I don't think that'll matter very much) and if it's over maybe break the qt rp2040 board?
😅
It would be wise to measure the output with a multimeter before hooking it to your board, yeah. If it's working okay you can see it change as you press on the sensors, and you can verify the range of voltages.
Yepp, gonna do that before soldering it to the board
XD

So uh
Does that look right?
Also yes I do want to turn the four leds on with one pin
it's better to give each LED its own current limiting resistor, to balance the currents in case their forward voltages are slightly different. but that might work for a quick test
Anyone know when the pi shortage will end?
Probably not till next year
Unfortunately demand has attracted scalpers. until demand broadly falls, I wouldn’t anticipate it getting better for a while
Am thinking it’s more of an explosion of awareness and usage that. Scalpers. On the 3D printing geoups ie voron they are acticely looking for places with them in stock for builds. That has exploded in the past 3 years.
You have looked at eBay and non-authorized reseller sites, yes?
Adafruit and Pimoroni both took steps to stop scalpers because people were buying and reselling them for ridiculously high prices
Yes, demand has exploded. But scarcity in tech products over the last 2 years has been driven a lot by bot buyers
Looking to make a buck in hot products.


This is Pi 4 sold recently
And there at 1000s more in this list of “sold” on eBay
People are desperately needing/wanting Pi 4 so they’re willing to pay huge markups
Geez, even unopened Pi 4 from Adafruit on that list of recently sold for huge markups
I often see 5x markup on these things 😬
Yeah, if I saw a Pi 4 on sale from a non-scalper I'd probably just pick one up "in case"
I see
Alright, thanks!
^-^
<3
I thought this command line could be handy to keep in your grimoires:
cat /proc/cpuinfo | grep Model
Let's you know what pi you have in case you have forgotten and can't see it in a case, or a skull, or a pi controlled model.
Also, if a Hat is installed and if If is in spec and has an EPROM setup properly, you can use /proc/device-tree/hat/ to identify the Hat, and it's function
Can anyone tell me where I can find the source code for the framebuf library used in micropython?
I want to extend it to add rotation.
Hello friends. It has been about six months since I checked on supply chain issue updates. I wonder, do we have any light on the horizon? I've been sort of dead in the water with getting new RP4s or Jetson Nanos. Does anyone have any recent news on that front?
it's not gonna change any time soon
Thanks.
Hi I’m trying to measure battery life of a Lipo cell and display the percentage to a raspberry pi 4. Is there something that can help me do this?
Here's adafruit's framebuf micropython library, but it's deprecated: https://github.com/adafruit/micropython-adafruit-framebuf
GitHub
Pure python implementation of MicroPython framebuf module. Useful for boards with limited flash memory that cannot use the native C framebuf module. - GitHub - adafruit/micropython-adafruit-frameb...
@hollow otter , the CircuitPython version is linked from there as well.
The micropython version isn’t complete. It is supposed to have a text method. The one that ships in micropython has the function.
I think this might be it here: https://github.com/pfalcon/pycopy-lib/blob/master/framebuf/framebuf.py I got that from the link on the micropython-framebuf PyPi page

GitHub
Standard library of the Pycopy project, minimalist and light-weight Python language implementation - pycopy-lib/framebuf.py at master · pfalcon/pycopy-lib
That one's not complete either =/. It's okay. I'm just going to get a different board with WIFI that CircuitPython supports. The Pico W isn't supported on CircuitPython for the wifi module yet.
Anyone working with the pico-w having issues with mesh networks? It'll connect just fine to my aironet based network but my nest wifi mesh network just never connects? (Micropython, thonny, connection issue)

Using this for code reference: https://www.cnx-software.com/2022/07/03/getting-started-with-wifi-on-raspberry-pi-pico-w-board/
Get started with WiFi on Raspberry Pi Pico W board with MicroPython and C. Learn how to set an access point, run iperf, control an LED, etc.
Uh... Correct me if I'm wrong.
When I enable SPI, only bank 0 goes up by default, right?
Can I still use the pins assigned to bank 1 as normal gpio?

Ok, dropped the neopixel in favour of a LEDShim
(I2C driven, no level shifters or separated PSU, easy to stash in the RFID reader casing...)
If I don't add anything else, this should be the end of it, and yet I still have pin availability for stuff like a fan!
If I didn't occupy any reserved pin where I shouldn't, this layout would also be useful for routing the board with minimal ratnesting
derrrrp, this should've gone in *hw-design 😐
Hi all, does anyone know where I can find a GPIO pinout for Raspberry Pi 2011.12 (I am not sure which model this is, this is all that it is written on the board)? I want to replace it in an installation with a RPi 4.
Is this the board?

yes, that's the one @dusk grotto

incredible, thank you so much, @dusk grotto
I'm pretty sure I still have my 512MB Model B around somewhere
Np I'm just trying to help out
they seem to be pretty resilient little computers, im super impressed that the one i am being paid to replace is still operational
I got one like 2 years ago when I bought a box of arduino's and bread boards and other stuff
I know mine still works, I just have to find it. 😅
But then, I'm trying to get a 3D printed case for my Zero 2 W.
...which would be a darn sight easier if I had a 3D printer.
I do have a Pi1B right here in its pink case.
it was used as a print server until recently, and worked way better than any compact IP print spool out there XD
welcome to the club, I'm looking for either a CNC mill or a laser engraver (gotta engrave plexy) that wont cost an eye and a kidney, with decent specs
I think I saw one from creality at a nice price point
Well.... You could make an adaptable machine to do all three?
Hi adafruit,
Im developing some AWS IoT modules for a raspberry pi (actually for several) and im using the sensors of BME280, BN055 and INA260.
Each one of them im having some trouble because randomly gives spikes of 1 value (im reading and sending the value to grafana each 10 secs (aprox))
For example the temp is constant around 28-32 C degrees, but suddendly spikes to 1200 C degrees or 40 C degrees, is a bit random.
I have developed a few functions to have a natural progresion to that value (if its a true value) but the thing is I do have so many variables and want to find a proper solution.
In the docs I could not find anything usefull, and the calibration does not help.
I have tried other new sensor (of the same model) but the spikes dont leave.
Thank you.
PS: Im not sure if I should post in circuitpython, adafruit, or raspberry pi, so I will post in the 3 and if needed deleted after.

Hi! I recently purchased an MPR121 Capacitative Touch hat from Adafruit. It’s all soldered and currently on my Raspberry PI, but I’ve run into a recent issue. I’m using the pygame mixer script. I connect all the alligator clips to the objects before power on, but when I run it — all of the touch pads are triggering at once and it sounds quite chaotic. When I unplug the clips, the touch pad work as normal after power on. It’s currently ruining my life and I have a art installation opening on Friday. I’m an absolute novice at coding, but wondering if the continue and/or break line of code (within ‘While true’ block) is throwing it off? I’ve been switching the statements and getting varied results. Any support would be helpful!
okay I wish to know how I can program a 16 X 2 LCD Screen to show Raspberry Pi's status like CPU Temp to Fan Speed (if installed) and cpu and memory usage - can this work? I have the NEW Amiga 1200 case that supports the 16 x 2 LCD Screen
I would love to put as much status on it within a 16 x 2 LCD Screen
Lcdproc is your friend, along with an HD4870 screen (16*2)
needs to fit inside the NEW Amiga 1200 case's LCD location
as long the controller is supported ¯\_(ツ)_/¯
Here's what I've thought of showing
cpu temp then activity
memory useage then GPU if it's still within' 16 characters
So, does anyone know what caused the raspberry pi shortage? Is it just a whole bunch of people buying them, or an actual supply chain problem?
according to the true reason is the Auto industry and the virus
What's the best way to find circuitpython libraries and install them on the pi with blinka? For that matter how can I check if blinka is already installed?
import board
You can browse the libraries here https://docs.circuitpython.org/projects/bundle/en/latest/drivers.html each one has instructions for installing via pip3
to check for blinka you can pip3 list to see if it is installed.
there's a simple blinka test here:
https://learn.adafruit.com/circuitpython-on-raspberrypi-linux/installing-circuitpython-on-raspberry-pi#blinka-test-3030038
which is generally adding -circuitpython- in the middle on the name
thanks folks
pip list would work also, to just check if its installed
the blinka test script checks some other things, like if I2C and SPI are enabled
oh I forgot about init'ing i2c and spi
would the blinka installation take longer if I have poor internet service?
it currently just says "upgrading packages" and has for about 15 minutes
I'm looking for help searching for a solution to power multiple Pis off a single PSU. Ex: a "hub"/hardware that has multiple USB ports, each able to provide ~5V 2.5A. My problem is - what do I search for? what are these solutions called? I can imagine other ppl are powering multiple Pis without having a single PSU per Pi - how are they doing it?
I think the process is hung. It's been over an hour since it got to the Upgrading Packages section. How can I interrupt it?
there we go. CTRLC
I am trying to build a "point and shoot" camera w/ a Rasp Pi Zero 2 W , a Rasp Pi camera, and the Adafruit Mini PiTFT - 135x240 Color TFT.
I learned:
- camera.preview() "hard wires" previews to the HDMI port
- there might be a way to get this to work using pygame instead of pyCamera.
So I am hopeful about using pygame. However, I follow the examples, adding
os.putenv('SDL_FBDEV', '/dev/fb1')
However, images go to a window on my HDMI display. I am looking for help on how to debug this and get it working.
Thank you very much.
Is there a map somewhere of the pi pinout to the results of dir(board)?
(or from [Circuit]Python: https://gist.github.com/anecdata/1c345cb2d137776d76b97a5d5678dc97)
that works thanks!
Any idea how to kill a process when the COMMAND name isn't obviously appearing in ps aux?
it's just the GPIO numbers, isn't it ? https://pinout.xyz/#
Aren't the Pi 4 and Pi 3 B+ same size? if they are I'm gonna make a universal pi 4/3b+ mounts for my Amiga 1200 case project
they are the same size but they have different port arrangements so that's something to watch out for
As long it's the same size and same hole placements I'm good - I can make an universal Amiga 1200 case Pi Mount for a 4 or 3 pi
Can this work with the pi? - https://www.adafruit.com/product/292 I may use it to pull up the Pi's Status like some theses on the LCD - wanna have this display and delay for about 10 secs before switching to the next Pi Status




LCD backpacks reduce the number of pins needed to connect to an LCD. LCDs are a fun and easy way to have your microcontroller project talk back to you. Character LCDs are common, and easy to ...
yep, link to the guide at the bottom of the page
if only it worked with OLEDs though - the LCD is gonna be mounted inside my A1200.net Amiga 1200 case where the display cutout is located
dunno, there are I2C monochrome oled breakouts, usually small displays
I might get those female headers and solder them onto the LCD so I can mount the LCD to the Amiga case and put it onto the header - should I use I2c or SPI to pull up the Pi's status like those generated images displaying them?
🤷 whichever is more convenient, I2C uses less pins
I2c it is working with Pi's Status will be my thing to show on the display
once I have it I'm gonna work it until I'm happy with the code from piguy's code or adafruit's own code then run it on startup
how can I get the current working directory (in python at least) to stay /home/username/Desktop?
between reboots
making the current working directory a certain directory when you run a script ?
oh, start your default shell in a different directory ?
yeah the second thing
what shell is it ?
I'm using thonny since it came with the device and getting anything on a pi 3 is a pain
anything new
so not the default shell, you mean start python in a certain directory in Thonny ?
well, don't know if that's an option
no worries
ive used ping on my raspberry pi zero w and its going for like 5 minutes its at 350 times now when will it stop?
It never stops
Use control+c to stop ut
(that should stop almost any cli program)
Ok, if I'm understanding the docs right, EEPROM on hats serves to set the state of the pins on boot, right?
I control C does not work -- close the window that is running ping
So I use input for a button, output for a led, and ALT0-5 for the function assigned to that pin on that alt level (i.e. SPI pin)?
Might want to use ping -c 4 x.x.x.x which will ping 4 times in this example and stop
does anyone know how to tell what services are running at a given time on your pi?
ps -aux
That's prcoesses. You can try top too
thx
service --status-all
ok my service is running, but the code (which I checked works fine, it's just blinking an LED) is NOT running.
here's my service, it's patterned off of one that is working.
[Unit]
Description=test service
[Service]
Type=oneshot
ExecStart=/home/pi/Desktop/test2.py
StandardOutput=null
[Install]
WantedBy=multi-user.target
I feel like this should just be working. I also ran sudo systemctl enable testservice.service where testservice.service is the name of my service. Anyone have any hot tips?
just sudo systemctl start?
oh
yeah
I did
I checked and it's enabled
I checked using systemctl list-unit-files
What does systemctl status servicename say?
one moment
ah failed
"failed at step EXEC spawning /home/pi/Desktop/test2.py: Permission denied"
ok the code is still not running, let me check status again
I think rebooting is better because I'm trying to test that it runs on boot
ok now it's failing with "exec format error"
let me check my syntax
seems fine
Oh, that won't work
you need to call python to run that like /usr/lib/python3 yourscript.py
huh
This line: ExecStart=/home/pi/Desktop/test2.py
my older service works on another pi just fine and is bit for bit identical to what's above
except it's not test2.py it's the name of other code
Right, I bet it's an executable of some kind
ohh so I need to make it an executable?
Here's an example of mine, but I use a virtual env: ExecStart=/home/prcutler/workspace/pi-dial/.venv/bin/python /home/prcutler/workspace/pi-dial/pidial.py
I remember doing that now! This is completely an argument for writing things down
See how I'm calling python to run the script?
ack gotta edit this in sudoed nano
I got a warning that the unit file had changed on disk and to use daemon-reload and also got the same failure error message (no new code). Do I need to do the reload thing?
If you edited the file, pretty sure, it's been a while since I've touched systemd
If it told you to, I would
systemd is one of those things that once I've got it working I never want to touch it again. 🙂
Oh I can relate!
I thought you might!
hey it's working now!! Thank you! How do I sever the service?
or stop it or whatever. I just wanted to test that I could get it working
perfect
I'll have to time it such that my light isn't on when i stop it hehe
ok time to write this down somewhere
and if I want to re-enable the service? just enable?
If you enabled it, it will autostart on boot
oh so even though I told it to stop?
correct, that's what enable does.
start, stop and restart are the ones you'll usually run when updating it
oh sorry if I stop it, it will still run on boot because I enabled it?
is that right?
Correct
so how can I stop it forever? Disable?
Yup
If it's running when you disable it, you still need to stop it. But it will not start after rebooting
that makes sense. OK
Systemd is great, but hopefully u will never have to touch it again lol
I'm writing it up now so it's painless in the future!
Does anyone know what "language" a .service file is written in? I'm using a code formatting plugin for docs and it takes a language input
I don't think there is a code language associated with the systemd files
really?
Hmm
I notice in NANO, that anything inside [] blocks is highlighted. What does that signify?
Not sure, my nano didn't do that when I opened up one just now
does it have ini file or something ?
Can the py autostart Py Scripts? I need to have a script autostart on boot to desktop
Yes, it's possible by creating a systemd service
I wonder how I can do that once I my LCD status is finished
ping me when you need help, I am happy to provide guidance.
When you point ExecStart to python first and then to a file, what exactly are you doing? Are you saying "here's my thing that does executions and then here's my file to execute with it"?
Do you think I would be possible to use a raspberry pi 4 as a keyboard?
absolutely
but
a waste of resources for the most part
A pi 4 is quite powerful, you don't need anywhere near that power to run a keyboard
Eeeeh, depends, I want to create a thing that I could plug into my server, it would login and run somes commands while hosting a web page so I can know what's its doing and when it's done
I would have bought a pi zero w if I wasn't out of stock everywhere
I have at home a pi4
Kinda like a bad USB but to update /upgrade my server
what I'm doing is simple I'm gonna write simple code to the LCD to pull up the Pi's status like CPU Temp and Activity and it switches back and forth on my cpu usage and temp - its will start up on boot so I don't need to run it manually
GitHub
Python module to drive PCD8544, HT1621, ST7735, ST7567 and UC1701X-based LCDs - GitHub - rm-hull/luma.lcd: Python module to drive PCD8544, HT1621, ST7735, ST7567 and UC1701X-based LCDs

GitHub
Companion repo for running examples against the luma.oled, luma.lcd, luma.led_matrix and luma.emulator display drivers. - GitHub - rm-hull/luma.examples: Companion repo for running examples against...
it's a 16x2 character LCD I'm gonna use which the Amiga 1200 has for the HxC FLoppy Drive Emulator
There's one that seems to fit the bill
This seems to do what you need, try it out
https://github.com/rm-hull/luma.examples/blob/master/examples/sys_info.py
GitHub
Companion repo for running examples against the luma.oled, luma.lcd, luma.led_matrix and luma.emulator display drivers. - luma.examples/sys_info.py at master · rm-hull/luma.examples
You need to install the psutil module
Gonna use Adafruit's LCD library since I'll be getting their LCD Backpack then make the LCD do this and waits to change the the other CPU Status

Psutils module, can fetch temps as well
Thanks for sharing that, that will be useful for a friend of mine
would it work with their Backpack driver?
Of course, it's just a data fetcher, what you do with it is your problem
Btw, that backpack is a hd4870, the most generic controller ever, and luma.lcd will do the job gracefully, go at least try the demo I linked
it will come in handy once I have it since it's a 16x2 Driver I'm wondering if it works with one of Sparkfun's LCDs they make it's basically the same LCD but their branding
Same controller, same functionally
Does anyone have a guide or something to use a pi 4 as a hid device?
I think Zero can do it, don't know if 4 has the required boot mode for doing so
Yeah but almost 100€ for a zero is e x p e n s i v e
Maybe the boot mode or something can be changed?
Look at the documentation on Pi site
All cards are currently made of unobtanium
Sad
Yep
Guess I'll buy a Pico tomorrow and a zero when the price will be lower than my grades 
I'd like to use a 4 for this project of mine, "stuck" with a 3b+ and a blind 2b
I have a pi 4, it was used until fews days ago as a temporary router, now I'm looking onto a new user for it
I also have two 0s, but I need them for another project on hold 🤣
Need to find a way to make a conf webpage for it
FYI the 4 does support OTG on the USBC port
Hi im a beginner with circuitpython, so I played a bit with it on Thonny but now I wanna try to get on a bigger project so I'll be using pycharm. I followed this tutorial : https://learn.adafruit.com/welcome-to-circuitpython/pycharm-and-circuitpython ; it worked perfectly until I ran the code and I got this error :
File "D:\code.py", line 2, in <module>
import board
File "C:\Users\||nope||\AppData\Roaming\Python\Python39\site-packages\board.py", line 279, in <module>
raise NotImplementedError(
NotImplementedError: Adafruit-PlatformDetect version 3.27.0 was unable to identify the board and/or microcontroller running the Windows platform. Please be sure you have the latest packages running: 'pip3 install --upgrade adafruit-blinka adafruit-platformdetect' ```
so apparently pycharm is not detecting my board, thonny detects it and run the code perfectly and the adafruit-platformdetect is updated to its latest version so I dont really understand lmao.
I also saw this post https://forums.adafruit.com/viewtopic.php?f=24&t=188542 but I didn't understood that much and idk if it's relevant so I'll need some help I guess 🙃 (sry for spelling mistakes and stuff im french)
Adafruit Learning System
New to CircuitPython? This is the place to start.
that's python running on your computer not on the board
what board are you using ?
to get the REPL of the board, you need to connect to its serial port using a serial tool, like tio https://learn.adafruit.com/welcome-to-circuitpython/pycharm-and-circuitpython#serial-console-in-the-terminal-pane-3105096
It's a raspberry pi pico
and im on windows btw
Thony detects the board and shows the repl and lets you execute a file directly on the board with the run button, with pycharm you have to connect to the board manually to see the output of code.py
ooh ok ty
as tio is not available on windows what software should I use ?
ah, right on windows I don't know, Tera Term, Putty ?
k im downloading Tera Term rn
should I go for standard or full installation ?
ok I went for the full one my pc is not gonna die for 4 MB
okayy it's not working
well I'll just go for vs code this time
anyway thank you for your help the explanations were really good
@broken bay Actually, you can install tio on windows via msys2 or wsl/ubuntu.
well ok im gonna give it a try
what language will the code be in?
simple python to drive the LCD with adafruit's LCD Python or something else to pull the status up for the Pi's CPU Temp and Activity
ok check out this guide when you're ready
The process is a little different for python files but this is the background you need
Hello everyone. İ want to install latest version blinka to my jetson Nano. But i can install just 6.15.0 version l. Ubuntu list version from 1 to 6.15 but there is not 7 and abone
Use pip3
@tame notch Make sure you have Python 3.7 installed and set as the default. If you're not sure how, you can use this: https://learn.adafruit.com/circuitpython-libraries-on-linux-and-the-nvidia-jetson-nano/initial-setup#install-python-3-dot-7-and-make-default-3114929

Adafruit Learning System
Make hardware and interface with sensors super easy using CircuitPython
I am trying to connect to a second PCA9685 with my RPI and python, however; i can not figure out how to call the second chip in the code. Can someone point me to some example code on how to control PCA9685 with circuit python?? https://github.com/adafruit/Adafruit_CircuitPython_Motor/blob/main/examples/motor_pca9685_servo_sweep.py
GitHub
Helpers for controlling PWM based motors and servos - Adafruit_CircuitPython_Motor/motor_pca9685_servo_sweep.py at main · adafruit/Adafruit_CircuitPython_Motor
i have connected both chips, and assigned the address etc. Im not sure how to call the second chip in the code.
im having the same issue ^
do you have to use circuit python for this?
pca1 = PCA9685(i2c) # use default 0x40
pca2 = PCA9685(i2c, address=0x41) # specify 0x41
okay thanks
the library is circuitpython, but can be used with regular python on an RPI using Blinka
Hey guys, I am looking for to use some industrial sensors that are 4..20ma and land them into my raspberry pi. Have you guys done something like this? Any recomendations for an interface board?
do i have to create another ic2 for this in the code?
nope. that gets shared.
gotcha
could some one point me in the right direction ... I got the adafruit is2 audio bonnet to work with my pi Zero W .... I want it to work with omxplayer (command line audio), but after the initial install (where you test the sounds in left speaker and right) no audio plays
would this be a question for Audio ?
This channel should be fine
Did you follow the learn guide and install the script? https://learn.adafruit.com/adafruit-i2s-audio-bonnet-for-raspberry-pi/raspberry-pi-usage
yes sir I did
everything but the detail install
that was my next step
oh I did not try the /dev/zero playback option
Hello again i installed blinka as your advise to my jetson Nano. But getting error like this at finally


Is it possible to run an Led straight from a 3.3 GPIO pin or should i use something in between?
You'll want a current-limiting resistor in most cases, which will protect both the GPIO and the LED and let you choose the right brightness too.
I need to run 16 individual leds at different times. will that have an affect on the pico or should i use a driver
There's typically a datasheet spec for the total current that all the GPIOs in a MCU can source together. You should be fine if the LEDs are (just as a ballpark) less than 5mA each, but might run into Pico limitations if they are more like 20mA.
Hello again i installed blinka as your advise to my jetson Nano. But getting error like this at finally


Hi, it looks like Setuptools is missing. Make sure you have everything updated by following this section in the same guide: https://learn.adafruit.com/circuitpython-libraries-on-linux-and-the-nvidia-jetson-nano/initial-setup#update-your-board-and-python-3039592
Adafruit Learning System
Make hardware and interface with sensors super easy using CircuitPython
Thanks all of things i fixed help of another web page with writing on Google last error code
you are a benevolent angel :D
Hello, I am trying to install the new picamera2 library (https://github.com/raspberrypi/picamera2) based on the new libcamera stack in Rasbian Bullseye. I am running into issues when I run pip install picamera2 at the point where it is trying to install PyQt5. I've looked at various posts on the internet and they all say "make sure qmake is on PATH" and I don't know how to "make sure" that it's on PATH. Like how do I know I have qmake (where do I get it?), where is my PATH (I want this in a virtual environment so the obvious $HOME/bin" does not hold here. And once I figure out my PATH, how do I make sure qmake is on it? Any leads?
Thank you in advance
GitHub
New libcamera based python library. Contribute to raspberrypi/picamera2 development by creating an account on GitHub.
Anyone know if it would be possible to create a program which uses the Pis sound card to detect if the duration of a tone played and transcribe the duration of the tone played in seconds? I need to be able to detect the loudest sound (the tone) amongst background noise
And if so does anyone have resources relating to the topic
You'll probably want to investigate FFT (Fast Fourier Transform), which is how you would pull out the frequency components of an audio signal.
FFT + Windowing techniques are very useful in audio processing:)
To check if you have qmake, do a sudo apt-get install qmake - if it's installed it will yell at you, if it's not it will install it. Start there
Ah, this should give me a good start with my morse code translator
And if you know the specific frequency tone you're looking for, you can be more efficient, too, with a bandpass or Goertzel filter.
Yeah thats not going to happen, trying to translate random stuff i find on a radio, not every channel is the same and i think some are even a slightly different frequency
Thanks for entertaining the question. I do/did have qmake. It’s in my ‘/usr/bin’ folder. I also had pyqt5 but in the root user. It was installed using “sudo apt-get install python3-pyqt5”. I just wasn’t able to get it inside my virtual environment. My shoddy workaround that was to enable my virtual environment to be able to pull from system-site-packages. After that picamera2 was a breeze. I know that it’s kind of against what a virtual environment does, but that was the only way I was able to get pyqt5 to allow picamera2 to install. If anybody finds an actual way to install pyqt5 inside Python virtual environment, please remember to publish it somewhere for folks like me 🥲
My problem and my solution to it is posted at:
https://forums.raspberrypi.com/viewtopic.php?p=2027822&hilit=Picamera2+fail#p2027822
Glad to hear you got it working. 🙂
i was hoping some one could help me with omxplayer install on my pizerow with is2 audio bonet .... I am using the guide here "https://github.com/popcornmix/omxplayer" and its the " make -j$(nproc) " command that I get an error at
what's the error?
bash gen_version.sh > version.h
g++ -pipe -mfloat-abi=hard -mcpu=arm1176jzf-s -fomit-frame-pointer -mabi=aapcs-linux -mtune=arm1176jzf-s -mfpu=vfp -Wno-psabi -g -std=c++0x -D__STDC_CONSTANT_MACROS -D__STDC_LIMIT_MACROS -DTARGET_POSIX -DTARGET_LINUX -fPIC -DPIC -D_REENTRANT -D_LARGEFILE64_SOURCE -D_FILE_OFFSET_BITS=64 -DHAVE_CMAKE_CONFIG -D__VIDEOCORE4__ -U_FORTIFY_SOURCE -Wall -DHAVE_OMXLIB -DUSE_EXTERNAL_FFMPEG -DHAVE_LIBAVCODEC_AVCODEC_H -DHAVE_LIBAVUTIL_OPT_H -DHAVE_LIBAVUTIL_MEM_H -DHAVE_LIBAVUTIL_AVUTIL_H -DHAVE_LIBAVFORMAT_AVFORMAT_H -DHAVE_LIBAVFILTER_AVFILTER_H -DHAVE_LIBSWRESAMPLE_SWRESAMPLE_H -DOMX -DOMX_SKIP64BIT -ftree-vectorize -DUSE_EXTERNAL_OMX -DTARGET_RASPBERRY_PI -DUSE_EXTERNAL_LIBBCM_HOST -I./ -Ilinux -Iffmpeg_compiled/usr/local/include/ -I /usr/include/dbus-1.0 -I /usr/lib/arm-linux-gnueabihf/dbus-1.0/include -I/usr/include/freetype2 -isystem/opt/vc/include -isystem/opt/vc/include/interface/vcos/pthreads -c linux/OMXAlsa.cpp -o linux/OMXAlsa.o -Wno-deprecated-declarations
linux/OMXAlsa.cpp:22:10: fatal error: IL/OMX_Core.h: No such file or directory
22 | #include <IL/OMX_Core.h>
| ^~~~~~~~~~~~~~~
compilation terminated.
make: *** [Makefile:49: linux/OMXAlsa.o] Error 1
did you run ./prepare-native-raspbian.sh?
yes
pi@raspberrypi:~/mygitstuff/omxplayer $ sudo ./prepare-native-raspbian.sh
Modifying for native build on Debian
Checking dpkg database for missing packages
................
All dependencies met
Checking for OMX development headers
...
All dependencies met
Checking amount of RAM in system
You should have enough RAM available to successfully compile and run omxplayer.
sorry new to discord ... i wanted to past that as code
looks like that repo has not been touch in years
guessing things have changed with latest OS releases
in terms of specific locations for the dependencies
(there's info in #welcome about how to do code markup)
yeah omxplayer is being depricated for VLC ...but I run a simple program(also from git) that does a call to prayer 5 times a day and it uses omxplayer ...it works on the old pi model b just fine but now trying to get it to work on my pizero w
humm
this is what I am trying to impliment on my pizeroW https://github.com/achaudhry/adhan

GitHub
Raspberry Pi Adhan Clock . Contribute to achaudhry/adhan development by creating an account on GitHub.
i think I know what i will do
go to legacy version of raspberry pi ( buster instead of bullseye)
that way things should work better i think
Is this an appropriate channel to ask pi pico questions (PIO in particular), or would there be a better channel? (Where's help-with-help? 😛 ) Thanks.
Ask away. Someone might suggest another channel, but not sure myself
there used to be #help-with-rp2040-pio, but that was archived
use #help-with-arduino for arduino questions, or #help-with-circuitpython for circuitpython questions
@misty crypt There's a Raspberry Pi Pico discord.
https://www.raspberrypi.com/news/multilingual-blink-for-raspberry-pi-pico/ scan that article. ;)
Thanks everyone.
i've made a little raspberry pi + solar powered rover and it has a pi cam. is there a way to connect a second pi cam to it, so that i can have 1 camera facing "forwards" and the second facing "backwards"?
You can use a "USB" camera for the second camera.
would that work with raspistill ?
Probably not -- this may help https://www.arducam.com/docs/cameras-for-raspberry-pi/multi-camera-adapter-board/introduction/ there are adapters... I've had no experience with them.
i've never used a raspberry pi compute module, does that attach to my existing raspberry pi? or replace it?
It connects to a compute module IO board. It is a Pi4 by itself. https://www.adafruit.com/product/4787

Exposing every interface from Raspberry Pi Compute Module 4, the Compute Module 4 IO Board provides a development platform and reference base-board design for the most powerful Compute ...
this may alos be of interes -- using Open CV with a pi camera and a USB camera https://pyimagesearch.com/2016/01/18/multiple-cameras-with-the-raspberry-pi-and-opencv/
if i'm using raspbian currently, can i just use my same raspbian image on a pi compute module?
yep that's exactly the route i'm going and i've also done a PoC with that, with real time object detection in stream
I have not done a lot with raspian on the compute modules, but I think it uses the same images as any Pi.
i made a little solar powered, pi powered rover and a little website where people can see what it's doing and send commands to move it (basically for my friends, lol). but while working on it, you can issue a "move backwards" command but you can't really see where you're going yet... 🙂 trying to solve for that problem
I use RPI Web Cam inerface on my Pi robot https://elinux.org/RPi-Cam-Web-Interface
It provides a webserver to look at the videso.
I then us a separate python program to "drive"
does the webserver run on the pi? i'm trying to stream it publicly
yes
I use it for several "web cam" applications.
It usese the "legacy" camera (raspivid) but runs on bullseye -- pretty simple install ```git clone https://github.com/silvanmelchior/RPi_Cam_Web_Interface.git
cd RPi_Cam_Web_Interface
./install.sh
ah i see, this camera IO module connects to a pi compute module. dang the pi compute modules look to be all sold out currently
all pi's are tough to get these days. The above webserver runs on a Pi zero w or pi zero 2
or any other pi with wifi.
maybe i'm confused - does https://www.adafruit.com/product/4787 only connect to / work with a https://www.adafruit.com/product/4782 ? or can you connect to it any pi zero, pi3/4, etc?
Exposing every interface from Raspberry Pi Compute Module 4, the Compute Module 4 IO Board provides a development platform and reference base-board design for the most powerful Compute ...

The Raspberry Pi Compute Module 4 is based on the Raspberry Pi 4 Model B, but in a smaller form factor - perfect for embedding into products or projects without the bulk of a classic ...
it only connects to a compute module
the arducam adapter connects to a regular pi., I think..
cool, thanks! i'm real interested in that 2 camera module IO board and copute board.. i'll add that to my wishlist for when they're back in stock. til then i'll look for a cheap usb camera 🙂
Good luck!
kind of related, do you happen to know what gps options are for a pi? i've seen the hats - but i already have a hat and it's unclear how i can add more hats on top of hats.. that don't have the plugs/pins
There are USB versions https://www.adafruit.com/product/4279
wonderful thank you, i appreciate it 🙂 i think that will do the trick. i'm trying to geo-fence my rover so people can't drive it in to the pond 😅
Good plan!
Didn't know about that. It's way more stable than 'motion'; thanks!
Glad it is useful. It does use motion as its lower level.
Yeah,; but using just motion, as I was before, was crushing the Pi. Load avg was ~4 and it would eventually crash after a day or two. Now load is <1
seems fine!
Could it be possible to use a SSD for the Pi 3B+ instead of SD Card?
Might be hard
but maybe someone has made a sata to sd bridge
this might be an idea: https://www.aliexpress.com/item/3256802650120107.html

aliexpress.com
Smarter Shopping, Better Living! Aliexpress.com
On what board should is be possible to make a platform like adafruit io?
Hi guys, I have a question about powering the rpi 4. I have the buck converted I linked below. If I take the usb out and plug that into the pi I have no issues. If I take the +/- pins and connect them to pin 4 and 6 on the header the pi seems to power up but never connects to wifi and when I plug it in via ethernet both lights on the jack light up but the activity light does not blink just stays constant. If I take the +/- out and plug that into the usb port I have no issues again.
Anyone know why the network wont connect when I power the pi via pin 4 and 6?
https://www.amazon.com/dp/B0989DKYWN?psc=1&ref=ppx_yo2ov_dt_b_product_details

Buck Converter Module 12v to 5v 5A USB Voltage Regulator DC 9V-36V Step Down to USB 5V Transformer Dual Output Voltage Regulator Board for Phone Fast Charging(2 PCS)
Hi there, dumb question, it's either hit or miss.
Can I run micropython code designed for RPI pico on a normal RPI (1 B+)
no, you will have to modify the code for regular python
Following the guide for getting the WS2801 up and running I'm in trouble.
D6 for serial clock and D5 for serial data - nothing when running the sample code 😓 the first LED changes color when I touch the green serial jumper cable though 😅

Okay nevermind, the t was not pushed into all the way into the GPIO of the pi

crosspost from the help-with-projects channel, since its a raspi and I don't know which chan is more appropriate. apologies if this is a no-no:
heya! still working on my space station/space object pointer, been thru a few different revisions, and just wanted to sanity-check my next bit of code before I start writing it out. make sure im not missing some idea or library that will make this part simpler:
I have a servo connected thru a slip-ring, on top of a stepper, so it can spin forever without getting wires tangled. the stepper will spin 360 to point in any direction needed, and the servo can point from DOWN to UP, to cover any elevation needed.
I get my space station location info from the internet, using JPL's Horizons system, but I can't be %100 connected, so I plan on downloading info for the next 24hrs, perhaps 1min resolution, upon startup. that would be 24*60 = 1440 lines in my table. and then save that to a file on my raspi...
each line in the table will include TIME (24h:MM:SS), AZIMITH (0.00 - 359.99), and ELEV (0.00 - 179.99)
my thought for each update/loop is to: find the appropriate line in my table based on current time (probably remembering my last location so I dont have to run thru the whole table each loop). if the value has changed more than 1 step, then take a step.
am i overcomplicating or brute forcing this? am I missing some tool or library that could make this easier? or does this seem like a reasonable solution?
here's a silly question can the Pi have a "bootup" sound that plays on power up?
Yes
You can do it in a few languages
But it probably won't be right on bootup like you're thinking?
Have you tried any of the solutions here? The post is a bit dated but it should still work in theory. https://raspberrypi.stackexchange.com/questions/24723/create-startup-sound
Raspberry Pi Stack Exchange
I know that this question has already been answered, but the method described here
is actually not working for me... o.O
I read in some other forums that a different formatting is required, but I d...
something something Mac lookalike something
Yeah via speaker on gpio as the insignia TV has a delay of starting up the pi
hi, I have a heating mate with a power of 18w, powered by alternating current, I would like to control the heating power using rpi poco, is there a module that will allow me such integration? Can such a mate be powered with direct current and use a motor driver?

BOTLAND
Dwukanałowy sterownik silników DC z interfejsem I2C, w formie nakładki HAT dla Raspberry Pi, znajdziesz w sklepie dla robotyków Botland.
I am dumb at it.
i'm looking to get https://www.adafruit.com/product/4279 and connect it to a raspberry pi - what's the right cable to connect the two?

The Ultimate GPS module you know and love has a glow-up to let it be easily used with any computer, not just microcontrollers! With the built-in USB-to-Serial converter, you can now ...
any USB-A to USB-C cable should work -- https://www.adafruit.com/product/5045 or https://www.adafruit.com/product/5153
Actually. which Pi are you connecting it to? the W's have micro-usb connectors
I'm not sure of that jerryn if it's the rpi 4
it's finicky with the type of usb-c cable connected to it as per https://forums.raspberrypi.com/viewtopic.php?t=254002 which I read before I got one
For powering the Pi -- it can be finicky, but the USB GPS sensor would connect to the USB-A ports, I think ,and should be more forgiving but I'll defer to others with more information.
I see should be fine in this case, I never found any gotcha for the usb cables besides the one that power the rpi itself. I missed the gps at the top, my apologies
Hey. I have a weird problem, and I am not sure how to troubleshoot it. I use Pi400 with Pimoroni Hyperpixel4 display (no touch) with Adafruit cyberdeck hat. It works and all, but... If I run the system in multi-user.target, and run some graphical app, the picture flips in a way like it was ignoring a rotation config. Everything works fine in graphical.target. I was also not able to make the display work properly on lite version of the system which does not install desktop env and runs only in multi-user.target. I assume that the display to function properly needs that desktop env. Where should I dig to troubleshoot that flipping image? Is it weird driver problem? Is it some setting in graphical.target config? Is it something lacking in milti-user.target config? What can cause it?
I run newest raspi os 64bit.
@bronze dock That seems like a very reasonable plan: Estimate the location of where you should be in the future and move towards that location. But I have some confusion. Could you please explain what you mean by “find the appropriate line in my table based on current time”? If the data is 24hrs old, your current time won’t be in it. Or if it’s at a 1 min delay, then your current time still won’t be in it, it would be delayed by a minute.
What will you be doing with the rest of the history?
Ah, I see. You will download the trajectory 24hrs into the future. That sounds like a great plan, yes, provided that the object you’re following is guaranteed to be on that trajectory.
I have a european layout keyboard but the raspberry is getting it as an us, can i change it?
One moment im running one thing rn
I had to do sudo raspi...
yep. did you find the settings?

are there generic options?

oh, Debian…
Yes im running a adsb feeder with deabian 🙃
I guess the generic intl ones will do?
Done
I selected logitech and then it let me configure more things
Thanks for help cater!
hey

anybody know how to solve this? i am running windows IoT core on the raspberry and this is through IoT dashboard from microsoft
edit: solved can't do it without a extra module

someone pinged me?
I was trying to reply, but the bot flagged me. I was going to say there is an Azure channel on the Microsoft Python discord that may be able to help, too
If no one here knows the answer
would you be able to invite me into that discord i am not sure if i am in it
Sent a DM
have y'all ever heard of orange pi? is it decent compared to raspberry pi?
meh
A what?
often imitated never duplicated
never seen a pi clone that exceed pi4 capabilities at the same price range
i had months to look while waiting for pi4 to be in stock
GeeksforGeeks
A Computer Science portal for geeks. It contains well written, well thought and well explained computer science and programming articles, quizzes and practice/competitive programming/company interview Questions.
apple pi wpuld probably be nice though
connect to apple ecosystem Apple version of pi4
The project I'm working on right now is I have a device that only supports Ethernet, and I need it to connect to a network (wired or wirelessly) but block a specific port from being available to that whole network
So an orange pi might be fine, since I won't use GPIO at all or any rpi-specific thing, I just need the cheap ethernet port with Linux ability
I think you should check if the software is mature enough
Saw several where they say the software is unstable, lack polishing etc. I think that will be the compromise you'll really need to make and also less ports etc
Is it possible to fry the pimoroni 4 inch screens by installing them on the board backwards by mistake and powering on the pi?
like when putting in the dpi cable and/or the header cable ?
If I'm powering a pi with a USB cable with only power lines and free ends into a trimmable ac dc converter, should I trim up to 5.1V?
yeah so the 40 pins header are the gpio
afaik
and that cable has a latch to prevent you from putting it the wrong way
and one of those 40 pins is the power and another one the ground
seems the hyperpixel 4inch tft has a female header to plug directly into the 40 pins
hence their question
That's pretty common yeah
in that case I don't know because there is nothing to prevent you just with 2 40 pins headers from connecting it the wrong way
yeah or a video like https://www.youtube.com/watch?v=2mtP8-Q2iHA&t=85s
A high-resolution, high-speed 4.0" TFT display for your Raspberry Pi with optional capacitive multi-touch!
Product page
https://shop.pimoroni.com/products/hyperpixel-4
Task List using Raspberry Pi 3 and 7.5" E-paper Display
https://youtu.be/OW4GYmzWOb8
Social Networks
Blog: http://www.hamed.me
Twitter: https://twitter.com/hamedtaha
FaceBook...
You can also tell based on mounting holes
I'd say check a video/pics and you should be fine***



is that an rpi 400? can you confirm what you actually have please ?
Yes it’s an rpi 400 with a gpio breakout board
and the screen? I assumed it was an hyperpixel 4.0 from pimeroni, what is it actually ?
I am using jetson Nano and tensorflow using Python 3.6 however i need blinka. Blinka is want Python 3.7. i dont know what i do. Tensorflow and blinka must be together on jetson Nano
Do you help me !
https://learn.adafruit.com/circuitpython-libraries-on-linux-and-the-nvidia-jetson-nano Seems like this would probably show you how to use Blinka + Jetson Nano
then just use TensorFlow 2 if you need 3.7+
Hello, I want to know if someone knows a shortcut for this. Everytime I have to run my favorite python script, I have to activate my virtual environment from bash. Then I have to navigate to the folder that the script is in (it calls upon other scripts whose path is inside the folder) with cd ~\myfolder\mynestedfolder\. Because I use pigpio to control pins, I then have to run the pigpio daemon (if I just powered on the Pi) with sudo pigpiod then I do python3 myfavoritescript.py . I want to know if within my myfavoritescript.py file I can add a bash script that does all of the above i.e. activate virtual environment, navigate to the correct folder, then start the pigpio daemon if it's not started. It's also ok if it's not within the python script, and I just have to run a activatealloptions.sh shell file. But it shouldn't take me more than one line to do that. Makes me sound like a lazy person but I expect computers to do more for us. Please let me know if you have any leads on this because I've been searching for "insert bash script inside Python file" and the result don't seem to be relevant enough for me.
You can do this using a systemd service. Look into systemd
i think there's a one line way to run the script and invoke the venv at once
don't need a bash script
it's just a syntax thing, as i remember
you then just alias that
hmmm..but youre also wanting to dynamically launch the pigpio daemon
I know it's just wishful thinking but I was wondering if there was a way to do it.
To invoke the venv, I use source ~/.profile then workon myenv
I'm using a virtual environment wrapper that makes the commands shorter I guess
I would wrap your python code in a shell script added to your path, or an alias
hey, can you guys help me?
I'm trying to USB boot my CM4, modified the bootloader order but USB power for some reason stays off..
even with USB_MSD_PWR_OFF_TIME=0
My file is:
[all]
BOOT_UART=0
WAKE_ON_GPIO=1
POWER_OFF_ON_HALT=0
# Boot Order Codes, from https://www.raspberrypi.com/documentation/computers/raspberry-pi.html#BOOT_ORDER
# Try SD first (1), followed by, USB PCIe, NVMe PCIe, USB SoC XHCI then network
#BOOT_ORDER=0xf25641
BOOT_ORDER=0xf165
# Set to 0 to prevent bootloader updates from USB/Network boot
# For remote units EEPROM hardware write protection should be used.
ENABLE_SELF_UPDATE=1
MAX_RESTARTS=5
#HDMI_DELAY=5
#VL805
NET_INSTALL_ENABLED=1
NET_INSTALL_KEYBOARD_WAIT=900
USB_MSD_PWR_OFF_TIME=500
Documentation:
https:// www.raspberrypi.com/documentation/computers/raspberry-pi.html#USB_MSD_PWR_OFF_TIME
screen stays like that indefinitely.
Please ignore my Development environment ™️
Ps @ me with replies. Thanks
I just watched "THE GREAT SEARCH - Latching Power Relay for FeatherWing ". Will there be a feather produced with the higher power relay, or is the intent for the customer to build one. Also, can a feather be easily connected to a RPi Zero, looks like the pin outs do not match up?
Hello everyone, I'm looking for a module to put a SIM in my raspberry pi. What would be the best options?
Can I enable multiple i2c overlay on the same bus?
I.e. connecting an RTC and a pca9548 in parallel
As in a GSM modem?
You might use either an USB stick, and it'll become a network interface, or a dedicate hat, like this one
https://sixfab.com/product/raspberry-pi-base-hat-3g-4g-lte-minipcie-cards/
(It also works with usb)

You can insert 3G/4G & LTE mini PCIe modules and this Base HAT becomes a bridge between Raspberry Pi and modem. This cellular HAT provides simplified data connection for remote IoT projects, on the field, across the globe, everywhere. Start using a high-speed LTE connection with low power consumption in a slim form factor with all necessary soft...
Yes, GSM/LTE
What's the maximum sample rate and bit depth of the Raspberry Pi Zero W's I2S audio input? I'm hoping to input a 96-192khz 24 bit I2S signal and have it act as a USB microphone/line in device on my laptop via the onboard USB OTG port
forgive me if im wrong but this should be fine correct?

I am not sure you understand how USB and digital audio work. If so, this may help:
https://www.edn.com/fundamentals-of-usb-audio/
Somewhere before the USB port the analog signal from the mic has to be converted to digital, unless the mic is already a USB mic. But why do you need 96/192 - 24bit? I am not sure such high resolution USB mics exist. 16/44.1 is fabulous for must of us.
What i meant is that i have a 192khz 24bit I2S signal that id like to translate into a USB audio input for my laptop. Almost like a USB microphone, but without the microphone.
I just need to know if the pi can handle such a high resolution I2S signal
you can call your python script like this: /full/path/to/virtualenv/python /full/path/to/yourscript.py such as /home/pi/virtualenv/bin/python /home/py/myscript.py
in your python script, i think you can also do as the very first shebang line: #!/path/to/virtualenv/bin/python and then that should work with ./myscript.py on command line 👍
So maybe look for a USB sound interface (say at Sweetwater) that can produce 94/128 24bit, and see what USB port it requires (probably USB 3 or USB c) and then see if the USB ports on your PI are spec'd that high.
It should work with USB 2.0 right?

It claims USB 2.0, I would use a Pi 4 USB C. You can get it at Amazon, and return it if doesn't work. But you will need some software on the PI side. Focusrite might have software for Linix, but it probably won't run on an ARM/Pi processor. Also notice the specs say "Compatibility: USB-C iPad Pro " and "Power Supply: USB bus powered ".
I'm not planning on using this, i was just showing that 192khz 16 bit audio can be put through USB 2.0
Which the Pi Zero W i plan on using has
Geniuent pi OS question, why does it has urge to reset all of the gui settings when changing an Appearance Default.
Looking at the labels it should change nothing but a gui scale, but apart with that it changes whole environment to default
||It's good to have a panic button that reverts everything back (when you messed with LXappearance perhaps), just it's not the job of a screen scale changer||
Side question ... using default Raspbian on a Pi 4 .. can I assign an icon on the GUI to a script (like ./myscript.py) ??
I use 'wbar' on Debian (amd64 desktop) which has a config tool to specify the exact icons it uses.
great! I will try that .. thanks
;) pretty sure I did run 'fluxbox' with 'wbar' on Raspbian. fluxbox the window manager. I kept 'pi' as the factory set it up and added another user with same privs, with my preferred stuff.
Still need help here pls
Hello, I have an issue with I2C with Adafruit motor HAT for RPi. More info and screenshots are in thread at #help-with-circuitpython
i'm like 99.9% sure you can but i don't know how to do it, i rarely use linux gui. i think you might be able to right click and choose an icon or something like that 🤷
You can make a script.desktop file, recalling your script and using an icon of your choice
I will look into that &, try it .. ty
Anyone know how to get Realtek RTL8152 working with a Pi 1 model B?
It plugs in and is shown on lsusb, but doesn't show up as an adapter on ifconfig
never mind, I just hadn't configured it as an adapter yet
How do you plan on sending the signal to the USB port?
Can you guys help me with this please?

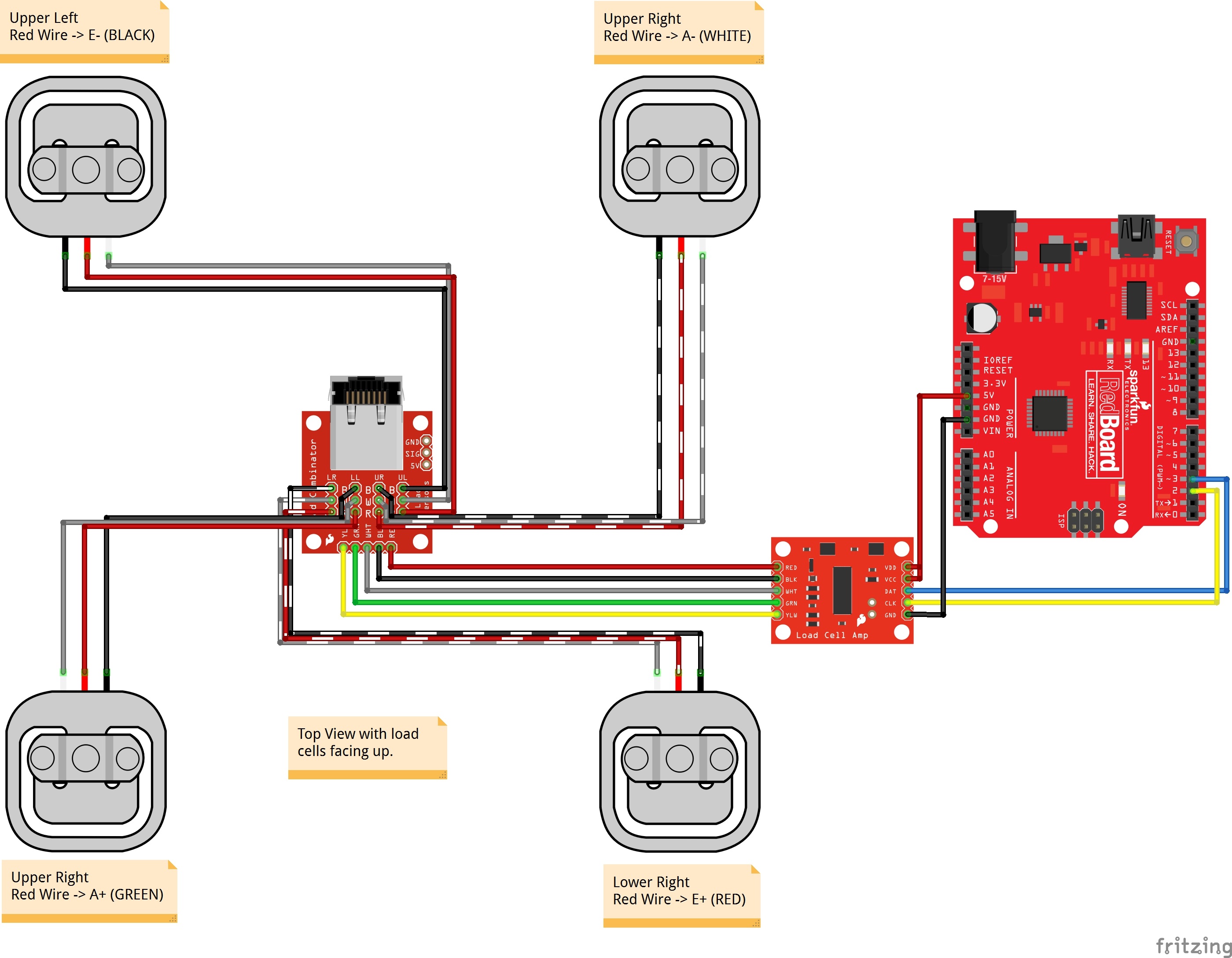{kind=link}
OwO
Tell me how
Hey so I'm trying to use one of these mini Pi TFT displays, and I get static issues on it. So on this page https://learn.adafruit.com/adafruit-mini-pitft-135x240-color-tft-add-on-for-raspberry-pi/kernel-module-troubleshooting it suggests I pin the kernel version, which works, but then I re-run the script as it suggests, and the script updates the kernel again. How do I fix this? Thanks
(I'm also working on a Pi 1 B)
what's a good way to turn off a pi that I can't SSH into and also can't get the HDMI output to display anything?
wire a button to it? One of the pins defaults to power for a button
doesn't that require listener code?
No
how do I tell if it's turned off? Didn't think of that
the act light isn't flashing but there's a bit of a spark in there
Well, the same button could turn it on. Here's the example: https://www.instructables.com/Raspberry-Pi-Power-Button/
yeah I was aware of the power on functionality but it was my impression that the power off required code in the background
I might just pull the plug, I have everything backed up
ok, force reboot is risky but it seems to have paid off.
How often does a 4b 8gb model go in stock on adafruit, is there a set time it would go in stock?
my answer to that is good luck
I don't think it's a predictable phenomena in any way
Having an issue with some really simple code/hardware
I have a SPST-NO button wired with one wire to D5 and one to GND. I have this code with Blinka
>>> import board, digitalio
>>> button = digitalio.DigitalInOut(board.D5)
>>> button.direction = digitalio.Direction.INPUT
then I run:
>>> button.value
>>> True
then I depress the button and run
>>> button.value
>>> True
I should be reading false.... I am really confused.
in fact when my circuit is wired up with the input pullup done in software, I read continuity between the pins of my button
anyone got any clues?
please explain what you mean by "read continuity between the pins"?
resistance or continuity readings with a DMM are very difficult to interpret if there are any active or frequency-dependent components present, especially if they're powered on
hmm
have you confirmed with your DMM that the switch on its own is operating as you expect?
well I just disconnected something that's been causing trouble in the circuit and now they don't read as connected but the code still doesn't work
I have
all powered off, it works normally
I lied, removing the something didn't help after all
This is very odd
jumper (or wire a 1k resistor or so) from D5 to ground and see how that reads?
(helps to limit the current if the pin is accidentally set to output)
1k should be stronger than the internal pullup
button.value is still True
oh hey
guess who is a goofus
PIN 5 != D5
sigh
it worked!
ok
I'm not losing my mind, yet
Recommendations for a portable battery pack for pi400?
I keep telling myself that.
One of my daily affirmations, too.
when using nano, shouldn't CTRL+O save your file wherever you opened the nano instance?
because the file I'm trying to create is not appearing in the file manager and I can't find it with sudo find
if you have the rights
I mean I should?
if not, it should tell you what it's doing
I used sudo nano
and I am a sudoer
it said "wrote out x lines"
I've done this before on this exact pi and it worked fine
I guess I can try not using nano and then use sudo mv
dunno, make sure you are looking the the right place 🤷
Does anyone know of a good library for using buttons on GPIO pins? That allows for detecting combinations of buttons pressed, holding buttons, double taps, triple taps, etc?
is gamepad still used?
module deprecated in favor of keypad (gamepad module went away earlier; gamepadshift module went away in 8)
maybe check out keypad as Anecdata mentioned, it's the one I was thinking of
I found a guide for making an image of your pi using an USB thumb drive. I don't have one on hand but I do have a USB SD card reader + card. Workable?
Potentially yes. I've had it act the same before, other times, total failure.
Worth trying, you should know quickly if it's not going to work.
At least I assume if it images properly, it should allow for the image to be used successfully as well.
Don't bet on it until you're certain though. 😄
hello, anyone here done anything with restaurant menu boards? im wondering if i could create some sort of enclosure that would withstand houston heat outdoors.
Hello, I'm new to Raspberry PI and CircuitPython. I'm trying to utilize the Adafruit VL5L1X Flight Distance Sensor. I followed the learn page and modified the code to fit my Raspberry PI PICO RP2040, but I keep getting a Clock stretch too long error. Solders are fine, wires are all intact and connected to the correct pins, heres the code.


I haven't done any locking or unlocking yet, since the error occured before and after I added the code.
May be the wrong channel..., does this channel do code help?
Welcome! Yes. You're in the right place. You could also have posted to #help-with-circuitpython, but we discourage cross-posting, and this channel should work. Most folks here are community members volunteering their time around other obligations, so please be patient. Folks who have knowledge of the topics usually check those channels.
I'm not sure what this error is. You can start by running your code in debug mode line by line to identify which of the lines is running into that error and take it from there. I would hazard that it could be timing_budget variable that you could fidget with but I could be wrong.
There are issues with certain I2C devices and Raspberry Pi clock stretching. I don't know the details, I only know that it's a thing. I'm hoping someone who has dealt with it can chime in.
I really like pigpio https://abyz.me.uk/rpi/pigpio/
Raspberry Pi Reg. C GPIO library and Python GPIO module and shell command utilities to control the GPIO, including SPI, I2C, and serial links.
I've looked all over the internet and cant really find anything that makes sense, or relates to my problem. It has something to do with the i2c = busio.I2C(board.GP11, board.GP10)
Strange, I've used ctrl+S before. The commands are at the pallette at the bottom, no? Also, if you hit Ctrl+X, it should ask you if you want to save or not
The function takes an extra (optional) parameter of "frequency", but even if I plug that in it still sends the same error
Like I said, it's a known issue, but I don't know details, or how to deal with it. Maybe search forums.adafruit.com for "clock stretching" and see if it was ever discussed there.
Someone might have, and there might be a fix in the thread.
I solved the issue
I was using a resistor for the pullup that was too low of an ohmage
Which made the signal mess up between the two boards
Well...
Now I've got another problem

I put 29 address in since that is the default address for the Flight Sensor, but now I'm getting an address error
But I'm not sure if this is caused by my janky resistor setup
You're welcome! That's why we're here, why we started this Discord server in the first place. 🙂
Is there a way to scan all devices connected to the PICO? Its still giving me the No I2C device at address: 0x29
Yes RP2040
The scan code is here: https://learn.adafruit.com/circuitpython-essentials/circuitpython-i2c#find-your-sensor-2985153

Do you have to pass it the I2C address? I only ask because the example code does not: https://learn.adafruit.com/adafruit-vl53l1x/python-circuitpython
Good call, Paul. I don't think you do if you're using default.
If I do not pass the I2C address it gives me function parameter error
I cant use "board" for the I2C function
As it doesnt have the property for me, only "busio" has it
LLama, is the power LED on on the ToF sensor?
Yes, its on
Accurate, because Pico.
Ok, that's good. Figured I'd ask.
Try the scan code? Except change the setup to use the Pico suggested set up line.
But the Pico doesnt detect the board, so I guess my wiring isnt connected. But its odd, since if it wont run the code until I put in the correct pins, implying it knows those pins are connected to something...
GP0 and GP1 dont work, the defaults
I put them in the GP11 and GP10 pins
GP11 for SDA and GP10 for SCL
Not all pins work as I2C, I think. Most of them do, though. The RP2040 has bonkers capabilities on every pin.
Dang
But, there's a thing where you have to use pins in a certain I2C group.
Do you have a GP24 and a GP25? They will work as SDA and SCL respectively.
GP3 and GP2 will also work, SCL SDA in that order.
Nice!
@sacred swift FYI this channel is more about Raspberry Pi computers than it is the Pico. I didn't realise that's what you were using initially. So next time, if you have more questions, post to #help-with-circuitpython. Good luck!
Can I use both SERVO HAT and MOTOR HAT if I use tall headers for one of them?


i'm having trouble getting the https://www.adafruit.com/product/4863 cyberdeck hat and the Pimoroni HyperPixel - 4.0" Hi-Res Display https://www.adafruit.com/product/3578 to work on the raspberry pi 400
Cyber-warriors, listen up here! We’ve got with some zero-day unreleased hardware we just dumpster-dived. Now you can crack kodes, and write skripts with style, thanks to the CYBERDECK ...
Pimoroni's HyperPixel features a 4.0" display with 800x480 18-bit color pixels and a capacitive touch overlay, making it more sensitive and responsive than a resistive touch ...
i followed all the instructions but all that happens is the backlight goes on and the pi no longer displays on hdmi
could someone explain the difference between the cberdech hat an bonnet to me please?
I am trying to figutr out how to attach a pimoroni hyperpixel 4 inch display to the pi 400
hat is taller and is meant for regular raspberry pi hats, the bonnet is meant for hats used on the pi zero & zero 2
Can some cheap displays not work with the pi? (3A+). I bought a cheap almost literally no name HDMI display off of Amazon and it just doesn't seem to work
Does it work from another HDMI source like your laptop/PC?
man these displays seems to be a huge problem
couple of unsolved questions about them lately
Oooof
Doesn't work with my PC either
Got some e waste on my hands
That's frustrating
I meant displays generally not that specific one
and you dont have a pi 4 do you ?
@fresh marsh The Adafruit Cyberdeck HAT was developed to give easier access to the I/O of the Pi-400. The Alignment Key also reduces the probability that an extension cable could be installed incorrectly and get the pin alignment 180 degrees out. The Cyberdeck also provides some ready made connections (STEMMA/STEMMA QT) for adding external sensors.
The Cyberdeck Bonnet just allows for a more Low Profile setup.
AND @fresh marsh in reference to your HyperPixel issue., you have to either cut a trace or remove a diode on the board. https://learn.adafruit.com/cyberdeck-bonnet-and-hat/fixing-pin-conflicts#option-1-cut-a-trace-3104511-6.
Adafruit Learning System
HATs and Bonnets at a jaunty angle!
I have an Stemma QT SHIM for a Raspberry Pi (Product ID 4463). I am trying to connect it to a NeoPixel strip with a 3 pin JST SM connector on each end. I need to go from the Stemma QT connector to the JST SM. Is there a cable to do that or do I just need to make my own?
There isn't a cable for that. I usually use the STEMMA QT to male header pins, and plug three of them into the NeoPixel strip. But you could definitely make your own as well.
Thank you for the fast response! I appreciate the info!
You're welcome!
Hello, do these instructions work with the raspberry pi 4? it isn't listed in categories but i thought that might just be because they didn't update the page https://learn.adafruit.com/fona-tethering-to-raspberry-pi-or-beaglebone-black/wiring

Adafruit Learning System
Connect your Linux board to the internet through a cellular data connection with FONA!
Hi, does anyone know how to autorun 2 python scripts (a GUI script and a server script) together. Unfortunately only the GUI file gets executed, the server file not
(on raspi)
what's the fastest way to connect remotly/wirelessly to my rpi2 which is a bit unwieldy to connect on locally (touch screen would have to plug keyboards/mouses/etc) ?
is having only the command line OK, or do you want the GUI?
on today's Pi 4, are there any back-powering issues powering the board via GPIO while connecting the USB-C port to a PC (running in peripheral/gadget mode)? I've seen fragments of discussions online about it (more for the Zero) but haven't found a real "yes it's fine" or "that's going to cause problems" or "here's the cable you need".
The GPIO is a 5V output, not an input. It's provided to power exteral devices via the GPIO bus. It's bonded directly to VBUS from the USB-C power-in connector.
I'd be more comfortable sealing off the USB-C connection if I was using the GPIO pins for 5V input, so that a second power supply cannot be also connected (via USB-C).
I am following this guide to backup my pi as an image https://www.tomshardware.com/how-to/back-up-raspberry-pi-as-disk-image but I'm stuck on step 7. It's telling me that myimg.img is not a file. However step 5 says to only do it if you previously shrunk the partition on your thumb drive? Yet that seems to be where myimg.img is created, no?