#circuitpython-dev
1 messages · Page 315 of 1
@idle owl (sorry if you get double pinged, the bot ate my first one) RE: discord links in the repo readme files. I was able to re-use a few bits from adabot to check all of the repos and generate a report of ones that have the invalid discord links. There are many more with the invalid one, but there are some that have already been updated with the new correct one. https://gist.github.com/FoamyGuy/f913a47788fb8eede1747ffa4dc6ea7c

The cookie cutter repo has the invalid link as well: https://github.com/adafruit/cookiecutter-adafruit-circuitpython and it is not included in that report. I think only repos that start with Adafruit_CircuitPython plus the core repo.

GitHub
Cookiecutter template for Adafruit's CircuitPython libraries. - adafruit/cookiecutter-adafruit-circuitpython
D1, D2, and D3 are green, red, and blue, so would you be interested in pretending to use them as a single RGB status LED, similar to the PCA10059?
@lone axle Hmm alright. For sure update cookiecutter. We'll have to decide what to do about the libs.
What's the difference between with ESP32 Airlift breakout and the HUZZAH32 ESP32 Breakout when used as a wi-fi co-processor in CP?
anything?
Probably unrelated but I've been plagued by MemoryError of 1784 bytes too for a while.
These occur all over the place in my code after the BLE comms have completed. I'd initially assumed this was related to dict enlargement based on the peculiar value and seeing an occurrence of it in https://github.com/jczic/MicroWebSrv/issues/5. I've been rewriting bits of the code to pinpoint where it occurs and oddly it will get reported even on a variable = None line. For start_scan elsewhere I ha...
The PCA10059 has one single color LED and one RGB LED, where as this has 3 physically separate LEDS and an empty set of pads for a 4th LED. If you think it's better to have it pretend to be a single RGB LED I'm not entirely against it, I just don't think it accurately reflects the hardware to treat it that way.
 vs
vs

@lone axle I've asked @trim elm to work with you on getting the libs updated. No rush on it, he's finishing up another project first, but wanted to let you know.
Since the SAMD21 and SAMD5xE5x levels are different units, I think it would be better to have SAMD21_BOD33_LEVEL and SAMD5x_E5x_BOD33_LEVEL definitions, to avoid confusion. Note I also label it as BOD33, to be clearer.
I think this is a useful build option for your purposes.
If the bootloader requires a certain level (which the SAMD51 UF2bootloader does), that will stymie your changes here. The same is true of the fuse settings. You may not be able to re-boot the board when the battery is low.
stray ( here.
Also copy the comment about why the level is 2.7V. Any board with external SPI flash chips like the ones we use will need 2.7V min due to the requirements of those chips.
It sounds like the error could either be generated by 1) code running the background between VM byte codes (audio runs during this time) or 2) setting a new local variable will increase the locals dictionary size and potentially cause a reallocation.
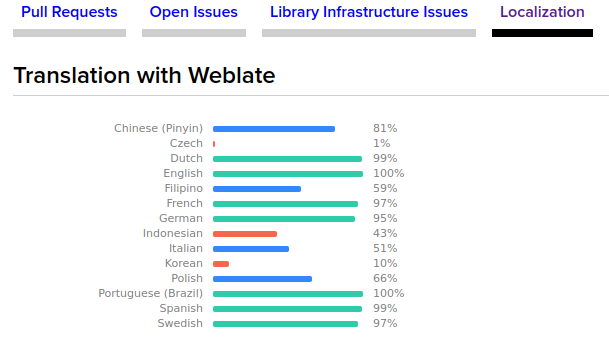
Translations update from Weblate for CircuitPython/main.
@hlovatt Thanks for the explanation! That's super helpful. I had never thought about that case.
I'm happy as-is too. I didn't realize they were separate LEDs and either approach works for me.
Want to try fixing it? I think you'll need to add an exception here: https://github.com/adafruit/circuitpython/blob/main/shared-bindings/displayio/Group.c#L210 or maybe the mp_get_index call can be modified. I think it's throwing the error.
Is there something different about the cookie-cutter repo and how it uses Git compared to other library repos? I forked and cloned the cookie cutter repo. But my IDE thinks that none of the files within it have been added to the repo, which is not something I can recall ever seeing.
oh, looking back at the terminal I see now that I overlooked this error:
Receiving objects: 100% (702/702), 151.60 KiB | 2.44 MiB/s, done.
Resolving deltas: 100% (405/405), done.
error: unable to create file {{ cookiecutter.library_name }}/examples/{{ cookiec
utter.library_name | lower }}_simpletest.py: Invalid argument
error: unable to create file {{ cookiecutter.library_name }}/{% if cookiecutter.
library_prefix %}{{ cookiecutter.library_prefix | lower }}_{% endif %}{{ cookiec
utter.library_name | lower }}.py: Invalid argument
fatal: unable to checkout working tree
warning: Clone succeeded, but checkout failed.
You can inspect what was checked out with 'git status'
and retry the checkout with 'git checkout -f HEAD'
That is likely my issue.
I'm not seen that. what OS are you on? maybe the file paths are too weird
Windows
and yep, that was going to be my guess that it may not like the brackets used in filenames like that
or percents is probably the issue actually, not brackets
windows tries to resolve percents as shortcuts or something I think like %APPDATA%
I can try with linux in a bit.
@gilded cradle hey, I'm adding a new board to circuitpython.org -- I created my new _board/boardname.md file. Building locally with jekyll, the boardname.html file gets generated, but I can't search it from "downloads". Did I miss a step? I can PR what I have in case you need to see it to answer.
hmm I kept fiddling with things and eventually it appeared ‽
@onyx hinge thats pretty much my web dev experience
@onyx hinge good to hear.
I took a look at this function and also in obj.c for the definition of mp_get_index and I think you are right that the error is caused here because theindex which is Zero is >= the length of the empty list len (See below code snippet from obj.c line 423).
As I’m totally unfamiliar with the usage reasons for mp_get_index (It looks like it is doing some kind of type conversion), I would suggest updating the insert function to only call mp_get_index if the list length is > 0.
I...
thanks dan! Thanks dan!
@prime flower https://wiki.python.org/moin/UdpCommunication
@idle owl Can I push the discord link changes to master as long as I've verified nothing aside from the discord link was changed?
@trim elm Hmm. Maybe PR a few first?
@idle owl Yeah, that's probably smart
@trim elm I mean it's probably fine, and obviously with version control we can roll back mistakes, but it's worth verifying first. PR a few and then we'll go from there.
Yeah
@trim elm I approved the last two, merge them once checks pass. And push the rest. But please verify each library once you've pushed, check the commit to make sure that's all there is to it. Basically so we're not finding out later that we borked something. PR to NeoPixel if it's needed, don't push directly.
Pypixelbuf as well. PR to that if it's needed.
@idle owl Sure thing. I've already outputted the diffs to a file and verified that the changes were exactly the same, so I'm confident as far as that one goes, but I'll make sure they are passing the CI
Ok, both of those do need it so I'll do that first
Thank you.
@trim elm Ok approved pypixelbuf. Please merge it once it's passing.
Pushing everything else now
@lone axle In about an hour (it's probably going to take a while for all the Actions to run) can you verify that half of the libraries I've pushed to are passing CI? I'll do the other half
@trim elm yep can do.
@lone axle Also, I'm starting to think we might want to make a directory in the adabot library that houses scripts we've written to do specific things using Adabot. It might be worth making a PR with the script you wrote and a new directory to house stuff like that
Ok, they're all pushed. I'll go through in a bit and verify they're passing
@lone axle If you want to do the first half (JWT to CharLCD on your list) I can do the second half
Okay yep I will get the first half once I am wrapped up with what I'm working on now. And I'll make a PR for adabot to add that later on tonight.
Awesome! Thanks
Does anyone know if something about import depth was changed in cpy 5.3? I updated to that from an older version though i don't remember which, and had my project breakwith RuntimeError: maximum recursion depth exceeded. For fun I loaded the 6.0.0 alpha and it was fine yet again.
Project in question if it concerns anyone is this https://github.com/KMKfw/kmk_firmware as it's quite the large bit of code for these tiny microcontrollers.

GitHub
Clackety Keyboards Powered by Python. Contribute to KMKfw/kmk_firmware development by creating an account on GitHub.
@idle owl I found 10 of my ~125 that are failing on either pylint or build docs, that were not previously. No clue why that's happening, and the pylint failures should be easy enough to fix, but I'm not as sure about the sphinx failures. Regardless, I'll try fixing them all tomorrow morning (unless you'd like me to do them tonight, in which case I can).
@trim elm Nope, I do not want you to do them tonight. 🙂 You should be done for the day.
@idle owl is the pyportal library suppose to be uploaded to pypi?
No.
Hmph
I imagine it did not work.
nope
Ok, I'll pull it and re-release it.
Yeah that's bad.
Will do it tomorrow.
Need to give it a setup.py.disabled, release the CP lib, and delete it from PyPI.
@tidal kiln @gilded cradle has been doing some work on the library, unsure if this is part of it
cool. thanks. yah, no canadian rock band. tomorrows fine.
@prime flower semi-related, was trying to test something for that library
but pip installed the wrong one (my mistake)
Yeah, the circuitpython version should not be on PyPI, but the Blinka version should. Perhaps in the release notes for the CircuitPython version, we can tell users to install the Blinka version instead.
@gilded cradle Not sure I want to do that. It's not a bad idea, but I think we should stick to referencing only the lib in its release notes.
Ok, then let's just not mention installing via PyPI (not sure if that's how we're already doing it).
Yeah I'll get it fixed up.
the CP version just shouldn't be there
Right.
Can we remove it?
thanks @idle owl
These items were aliased from audiocore to audioio for compatibility with 4.x, but according to our deprecation schedule can be removed in 6.0.
Ubuntu 18.04
Fresh flash using adafruit-circuitpython-espressif_saola_1_wrover-en_US-6.0.0-alpha.1.bin
From mu editor
Starting Mu 1.0.3
2020-07-08 18:50:34,317 - root:113(run) INFO: uname_result(system='Linux', node='fredrick-Studio-XPS-435MT', release='5.3.0-62-generic', version='#56~18.04.1-Ubuntu SMP Wed Jun 24 16:17:03 UTC 2020', machine='x86_64', processor='x86_64')
2020-07-08 18:50:34,317 - root:114(run) INFO: Python path: ['/home/fredrick/Development/circuitpython/ESP32-S2/venv/...
I've noticed this for a while but didn't think much of it at first. Now I think it definitely seems like it shouldn't be like this. On all the pages for the CP docs the html title shows the version as 0.0.0. As a result of this, if you Google 'circuitpython docs' the name for the page also shows 0.0.0. Is this intended?
Hello.
I've added a new board, please merge it.
I'll just use it as a standard GPIO then, thanks for updating the learn guide.
Should I leave this issue open for (possibly very far) future implementation?
Nope. You should close this one. Issue #1766 has you covered! Just follow that one 😉
The MemoryError: memory allocation failed, allocating 1784 bytes problems sound like a good match for symbol table addition as it explains why they occur within a certain area of code and shuffle around with code changes.
The start_scan buffer of 1800 seems to offer some useful if werid protection here. I may also "declare" all the variables outside the main loop.
More info. Trying to access from terminal...
fredrick@fredrick-Studio-XPS-435MT:/media/fredrick/CIRCUITPY$ sudo su
[sudo] password for fredrick:
root@fredrick-Studio-XPS-435MT:/media/fredrick/CIRCUITPY# ls
ls: cannot access 'lib': Input/output error
boot_out.txt lib
root@fredrick-Studio-XPS-435MT:/media/fredrick/CIRCUITPY#
?SERVERINFO
Owner
adafruit#3230
Region
us-west
Channel Categories
8
Text Channels
53
Voice Channels
6
Members
21978
Roles
32
ID: 327254708534116352 | Server Created
·
@palmtreefrb I found on mine, after a fresh build/install, I had to reformat the internal dive. If you open a terminal section to the board and at the REPL type
import storage
storage.erase_filesystem()
it will regenerate the file system.
The normal way we would debug this is to set a breakpoint on the exception handler and look at the backtrace. That requires connecting a J-Link or similar to the board. That's why I was hoping for a simpler example that occurs often enough to catch this, but I'm not sure that's possible here. Do you think any of that is possible?
The other thing I am looking at is generating and printing a stack trace when these exceptions happen. It looks like this is possible, if we add -funwind-tables...
- nRF52840 M.2 devkit is a developer kit based on a removable nRF52840 M.2 module and is designed for prototyping.
- M60 is a USB & Bluetooth 60% keyboard running CircuitPython.
After running erase_filesystem() I can now mount and access the directories.
dmesg still reports some errors though...
root@fredrick-Studio-XPS-435MT:/media/fredrick/CIRCUITPY# sudo dmesg
[38447.024174] usb 3-2.3: USB disconnect, device number 11
[38455.438884] usb 3-2.3: new full-speed USB device number 12 using xhci_hcd
[38455.561785] usb 3-2.3: New USB device found, idVendor=239a, idProduct=80a6, bcdDevice= 1.00
[38455.561787] usb 3-2.3: New USB device strings: Mfr=2, Product=3, S...
here is what I see with dmesg (Ubuntu 20.04)
[82416.830309] usb 3-1.2.1: new full-speed USB device number 10 using
xhci_hcd
[82417.052646] usb 3-1.2.1: New USB device found, idVendor=239a,
idProduct=80a6, bcdDevice= 1.00
[82417.052651] usb 3-1.2.1: New USB device strings: Mfr=2, Product=3,
SerialNumber=1
[82417.052655] usb 3-1.2.1: Product: Saola 1 w/WROVER
[82417.052657] usb 3-1.2.1: Manufacturer: Espressif
[82417.052659] usb 3-1.2.1: SerialNumber: 0000000000000000160000000CFCDF
[82417.0...I'd guess it's happening roughly once every thousand executions and it's not always the same device so it would take a lot of luck to catch it.
Another option here is to pass some or all of __FILE__ / __func__ / __LINE__ but maybe the overhead isn't worth it.
@crimson ferry https://github.com/arduino/nina-fw/pull/50#event-3528897382 may be worth pulling into our fork?

GitHub
When trying to perform an OTA update via the cloud servers using the nina as OTA storage, the connection randomly breaks down during download. A lower number of bytes are indeed received since some...
@prime flower Seems to correlate with one of the CP fork issues iirc? What's the process... pull/merge from Arduino, or manually make the (simple) change in the CP repo?
@crimson ferry which issue?
there isnt a process for this (yet) as our fork has yet to pull anything from upstream.
This fixes the audio overflow bug
@prime flower I thought there was an issue on large responses, but looks like more of a mystery issue https://github.com/adafruit/Adafruit_CircuitPython_ESP32SPI/issues/9
I'm curious if large responses are getting dropped due to the linked PR
I often get incomplete responses with 200 HTTP, heven't gotten to the bottom of it
@charred flare It's a simple matter to load the NINA firmware onto a standalone ESP32 with USB https://learn.adafruit.com/adding-a-wifi-co-processor-to-circuitpython-esp8266-esp32/program-with-esptool. (fwiw, Airlift add-on boards can also run Arduino 😉 ) ...unfortunately, there are three different procedures for loading/updating NINA on standalone ESP32s (e.g., ESP32 Feather), Airlift add-ons (e.g., Airlift featherWing), and boards with integrated ESP32 (e.g., PyPortal). Standalone definitely the easiest.
hi - do you have permission from nordic to use their VID?
https://devzone.nordicsemi.com/f/nordic-q-a/26196/obtain-a-pid-for-an-nrf24lu1-based-product
@crimson ferry Yeah I tried that on the last one, to update the firmware and I couldn't get it to load for whatever reason. I'm going to try again on this new one when it arrives. I'd like to stay away from Arduino both for the language and the IDE has always been super buggy for me since I started with these boards here in the last few months. Just tons of issues uploading sketches, duplicate ports showing up, etc.
@charred flare Yeah, I get spoiled with the ease of CircuitPython. If you still have the old one, I'd be happy to work through it with you to try to get it working. If so, let's take it over to #help-with-circuitpython
Thanks. It's all soldered up and in place though. It works well enough for a dev board. Just needs its own wifi from an old router to connect reliably - for some reason. lol (doesn't like my main Netgear b/g/n router but is mostly fine with the old Netgear running dd-wrt)
Hello, when will esp32s2 support pulseio and audioio?
Has discussed the VID issue before. It seems Nordic allows customers to use its VID in a product with its chip. Of course, there is a risk.
You can use our Nordic's Vendor ID. However, you will have a case that other customer also use our Vendor ID and use the same Product ID that you choose.
from https://devzone.nordicsemi.com/f/nordic-q-a/33851/nrf52840---usb-vendor-id-and-usb-product-id
considering the number of products you are making, we think you should get a VID at this point - other companies such as seeed and sparkfun and arduino and adafruit all have a VID
Has discussed the VID issue before. It seems Nordic allows customers to use its VID in a product with its chip. Of course, there is a risk.
You are free to use the VID/PID provided by us free of charge as long as you use it on a product with Nordic chip in it.
The VID is registered in usb.org and it is our registered ID, so there will be no clashes with VID with other vendors, however the PID are chosen by us in our production line and we cannot guarantee that they cannot clash with oth...
?serverinfo
Owner
adafruit#3230
Region
us-west
Channel Categories
8
Text Channels
53
Voice Channels
6
Members
21981
Roles
32
ID: 327254708534116352 | Server Created
·
The initial comment has been heavily revised to reflect the current status of this PR. Things are progressing nicely. SAM D5x/E5x is probably done, though as always there may be problems that only become obvious after testing, such as in the next alpha release.
Got your thought. I will try to get a unique VID & PID.
@tulip sleet any idea what the sam d21 equivalent of this is, before I go snorkeling in datasheets? I need to acknowledge the DMA "transfer complete" interrupt for a channel. audio_dma.c:288:9: error: 'Dmac' {aka 'struct <anonymous>'} has no member named 'Channel' 288 | DMAC->Channel[dma_channel].CHINTFLAG.reg = DMAC_CHINTFLAG_TCMPL; | ^~ ../../py/mkrules.mk:55: recipe for target 'build-feather_m0_express/audio_dma.o' failed
@onyx hinge I just searched for TCMPL in the DMAC registers:
I guess it'll be multiple operations, similar to this? ```void dma_resume_channel(uint8_t channel_number) {
common_hal_mcu_disable_interrupts();
/** Select the DMA channel and clear software trigger */
DMAC->CHID.reg = DMAC_CHID_ID(channel_number);
DMAC->CHCTRLB.bit.CMD = DMAC_CHCTRLB_CMD_RESUME_Val;
DMAC->CHINTFLAG.reg = DMAC_CHINTFLAG_SUSP;
common_hal_mcu_enable_interrupts();
}
so you set the ID, and then write a 1 to TCMPL, it looks like
.bit.ID = channel_id, then .bit.TCMPL = 1
i would think
er I guess this is enabling the interrupt, not acknowledging it. Still, thanks, I think this points me on in the right direction
Writing a 1 to this bit will clear the Channel ID (ID) Transfer Complete interrupt flag
yeah I've now confusingly referenced several different registers
but I think I got the answer I need, thanks
is the code above for SAMD51? I think it has a different method of specifying the channel. When the bits are written, indirect access to the corresponding Channel Interrupt Flag register is enabled. (SAMD21, in that screenshot)
the pasted dma_resume_channel was for D21
the error line was code that worked on d5x/e5x but was a compile error on d21
ah, I think that line is not needed anyway, it's a relic of previous confusion over whether to use dma interrupts or event system interrupts, which was itself an entire digression because the real problem was a bug that masked interrupts after a length of time. ⏪
@onyx hinge Occasionally I got back and read the ASF3 drivers, which are considerably easier to read. If you checkout circuitpython tag 1.0.0 and go to circuitpython/atmel-samd/asf, you can find the ASF3 drviers (they're probably available from Microchip as a zip file too). Interesting line there:
sam0/drivers/dma/dma.c
225: } else if (isr & DMAC_CHINTENCLR_TCMPL) {
227: DMAC->CHINTFLAG.reg = DMAC_CHINTENCLR_TCMPL;
What's the best way to submit a change to a library like Protomatter? Should I just fork and clone it separately, or is there some slick method of submitting a PR out of a submodule?
@ionic elk you can add your own fork as a remote to the submodule clone, then you make changes there, and submit a PR from there.
@bronze shadow what microcontroller were you running on?
mp_get_index is used to convert indices like -1 to the actual index. I think the exception needs to be if insert index is equal to the length of the group.
Ping me on Discord if you have any questions about building CircuitPython.
@onyx hinge when you have a sec can I ask you some protomatter questions?
It is not intended. I think it's a matter of getting the version into the sphinx config.
@ionic elk sure, give me 15 minutes?
Sounds good
Looks good! Please also add it to the website: https://learn.adafruit.com/how-to-add-a-new-board-to-the-circuitpython-org-website
Closing in favor of #1766. Thanks @AdinAck and @wallarug
There have been some bug fixes in TinyUSB I believe. I'll try updating it and we can see if it fixes the issues.
@slender iron It's the Itsy Bitsy M4 Express
hrm, I wouldn't expect the stack size to change. I know the STM stack size did
there is a performance regression currently but Jeff is working on it
@ionic elk I'm at your disposal
Coolbeans - I'm trying to figure out how _PM_timerStart get the actual STM32 timer to do the register stuff they do?
OK, let me look around at the code and refresh my memory
I don't see any place where TIM6 is actually passed to the Protomatter object
So I don't get how they're doing things like turning SR on and off
I think it's hardcoded
but where?
Once you get a VID for MakerDiary you'll have 2**16 PIDs for all of your products and more. Also, I'm available on WeChat as tannewt if you want help over chat.
You've got stuff like tim->SR, where does the tim get assigned?
here's where it's hardcoded in the core (ports/stm/common-hal/rgbmatrix/RGBMatrix.c): void *common_hal_rgbmatrix_timer_allocate() { // TODO(jepler) properly handle resource allocation including never-reset return TIM6; } and in protomatter (lib/protomatter/arch.h): ```
// Use hard-coded TIM6 (TIM7 is used by PulseOut, other TIM by PWMOut)
#define _PM_timerFreq 42000000
...
#define _PM_IRQ_HANDLER TIM6_DAC_IRQHandler
wait hang on yep just found that at the same time
and t6_handle.Instance = TIM6;
but basically look for the number "6" in that source file arch.h I guess
I'm not proud, it was corner cutting
Ok. So, I need to replace all of this with a single call to the stm_peripherals_find_timer - but I guess that's how SAMD must do it so maybe I should just check out how that does it
thanks for the pointer
in principle you get the "correct" timer pointer to void _PM_timerInit(void *tptr) in arch.h
but whether that happens yet or not I don't know
so anyway the right way is to pass the timer in to _PM_init, it gets to core->timer, which is then passed to _PM_timerInit cast to void*
I've made a test version of the application which just calls the function where the 65536 MemoryError occurs in a loop. I'll leave it going for a few hours to see if this can recreate the issue.
normally common_hal_rgbmatrix_rgbmatrix_construct gets called with timer parameter as NULL, so it calls common_hal_rgbmatrix_timer_allocate and passes that to _PM_init where it gets stored to core->timer, and later core->timer is passed to _PM_init.
once you have all that happening, you can start to remove the hard-coding from arch.h in protomatter
Board is a Metro M4 with UF2 2.0.0
Sensor is a prototype AS7341 but it will occur with nearly every sensor I use

I will update my UF2 version and try to get some info on the voltage levels
@gilded cradle It was so cool to see the pyportal electioncal on a biggger Raspberry screen. Looks great.
@tannewt I just noticed that this got merged into master instead of main, and so it's not present in 6.x series. Is that correct?
I have reproduced this on CircuitPython 5.3.0 on a Metro M0 and on A Feather M4. The Feather seems a bit less sensitive: a couple of sensors did not trigger this. I did not reproduce it on a Feather Sense (nRF52840).
It happens when plugging in a STEMMA sensor, or if you interrupt the power lines on one that is already plugged in.
Thanks @silver tapir. 🙂
I am not sure if there's anything to fix or work around on the software side. If there really is a glitch in the 3.3V rail that drops it below the 2.7V brownout level, then that's an electrical issue which could be significant. For instance, the external QSPI flash chips are not spec'd for operation below 2.7V, and could read or write bad data if their voltage dips.
That Fluff a great idea @stuck elbow !! I hope an ESP32-S2 one exists some day as well.
 Dylan H#2310 was unmuted
Dylan H#2310 was unmuted
@trim elm don't ping a bunch of people at once
This aims to fix #3134.
It sets the version and release values to the output of git describe --dirty --tags when sphinx-build is run in the build workflow. This overrides the value that is set in conf.py of 0.0.0.
I've tested building the docs using the -D flag and manually setting the version and release values and that seems to work just fine. But I do not know if this approach of using the output from git describe --dirty --tags will give the value needed. Either wa...
@dherrada if those libs already have releases, no reason I know of not to release
you mean all the BLE ones?
My bad, I asked Dylan to ping you four. Keep forgetting about the lockdown.
Pretty much what @tulip sleet said. Though I can't think of any that shouldn't be released.
Yeah, everything. I can link to the list if you'd like me to, but just assume that I'm releasing all of the libraries
are there any that have never had a release?
Not sure, but my script throws a TypeError when that happens so I look at those manually
I took a crack at this one, I don't have any experience with Github workflows...or sphinx docs, but I think that pull request may work!
@tidal kiln @gilded cradle Hah.... I went into my PyPortal lib directory and it was on a remove-from-pypi branch.... I had already done most of the work, but I neglected to delete it from PyPI. It's gone now.
@prime flower can chat whenever you are ready
@slender iron great, lemmie grab a water real quick
kk
Awesome @idle owl. It's possible that you deleted it and due to the cookie cutter naming everything Adafruit-CircuitPython-xxxx by default, I may have accidentally released to it when I was first creating the lib.
@gilded cradle Who knows. I found the PR where I made it setup.py.disabled on May 4 I think. The last time PyPortal was updated on PyPI was April. Either way, it's gone now.
@slender iron back! Amelia ok?
yup
@idle wharf esp fluff is hard to do, because antennas and RF stuff
@stuck elbow True. I guess the first decision would be on-board antennas or connectors.
I will definitely want to do a PewPew with esp32-s2 at some point
but I will probably just use a module for it
@tannewt What are the odds of getting this added to 5.3.1? People are routinely running into LED Animation issues with RGBW strips without this present in 5.3.
The performance gained back on the CLUE is much smaller... but it has not been given specific attention yet.
| version | time |
|---|---|
| 5.3.0 | 2.65s |
| 6.0.0.a1 | 4.66s |
| this PR | 4.112s |
?serverinfo
Owner
adafruit#3230
Region
us-west
Channel Categories
8
Text Channels
53
Voice Channels
6
Members
21991
Roles
32
ID: 327254708534116352 | Server Created
·
@jepler this is ready for your review now, alongside adafruit/Adafruit_Protomatter#14
@gilded cradle Do you have a few minutes to talk about PWM on Pi? I'm trying to understand what I'm supposed to be doing to this servo guide.
Sure
Ok, here's the guide https://learn.adafruit.com/using-servos-with-circuitpython/overview.
Does it "just work" as is? Or does the code need to be updated to do something else to utilise Blinka's PWM
It should just work as is.
Fair enough, ok, so do you figure I simply need to include a wiring diagram using a Pi to indicate it works?
You'll probably just need to make sure you have the latest version of Blinka.
Yeah, it would probably be a good idea to have a wiring diagram.
I would test it of course. 😉
Yah fair enough. I wasn't sure whether Limor wanted me to do that or you. I'll find out.
Ok
I was supposed to ping you about something anyway, not sure what specifically.
I have a Pi here, needs to be updated is all.
Ok. Maybe she meant to ping me if it doesn't work or you get stuck?
Or you just have questions...
That works 🙂
1700 iterations so far and no problems so whatever the magic combination is it's being elusive...
I was having a browse of the BLE code and I was curious about this code:
That's changing the value of self->scan_results before it passes it to ble_drv_remove_event_handler(). Will that work ok? ble_drv_remove_event_handler looks like it keys off b...
New to circuitpython and discord
Looking to use pedometer methods in adafruit_lsm6dsL LSM6DS33
Tag: 3.0.0 has support
Tag 4.0.0 does not have support
@jovial wasp lets move over to #help-with-circuitpython. This channel is more for development of the project.
For the raw_data m_malloc here:
What is the GC approach that stops this being GC'ed? I've seen discussions about this in the past and I thought it scanned python objects, the stack, registers and some explicit mechanism which may be MP_STATE_VM/MP_STATE_PORT ?
Thanks for thinking about this. A pointer to raw_data is copied into the singleton _bleio.adapter object. The adapter object should be on the root pointers list, but it might not be (at first glance). I have to do something else for a while but I will check that later.
adapter is not on the root pointer list, but it is gc'd explicitly in main.c in gc_collect(), so the storage it holds should be marked as not garbage when gc happens.
Hello, tannewt .
Thanks for the review and merge.
Looks good! Please also add it to the website: https://learn.adafruit.com/how-to-add-a-new-board-to-the-circuitpython-org-website
sure, I will.
Our Seeed friends have kindly allowed us to use their VID with a range of PIDs.
@ladyada Is it OK that I use Seeed's VID 0x2886 and the PID 0xf001 for our products in this project? One PID should be enough as all these products are based on nRF52840 and have the same driver for an OS.
You may ask why not buy a VID. Although being comparing to seeed, sparkfun, arduino and adafruit, we are still a small team with 3 persons and can not afford a USB VID yet. It doesn't break any rule by usi...
we purchased a VID when we were only a few people too, about 10 years ago. if you are selling USB products, it is the cost of doing business, just like it costs money to buy components and PCBs :)
you can totally use VID/PIDs donated by others. it is important that each circuitpython board has unique VID/PID. having duplicates will cause problems for customers. please ask seeed to grant you individual PID's for each item so they are unique.
@dhalbert Indeed there is a pretty substantial dip, well below 2.7V:

Here's the capture from the screenshot above:
https://www.dropbox.com/s/gk8usbzqbtujw2x/sensor_insert_vcc_sag.sal?dl=0
Note that this is from the Logic 2 alpha so you'll have to have that installed to view it
I'll close this since it does seem to be unrelated to CircuitPython
now I want this M60 keyboard 🙂
@deshipu Yup! I'll change the branch settings to make that impossible. Mind opening another PR?
@rhooper if you make a PR to 5.3.x, then I'll merge and release. Thanks!
I'm currently focused on adding WiFi support. pulseio and audioio are lower priority so I'm not sure when they'll be implemented. Your help would be appreciated! If you'd like to help and want to chat, I'm on WeChat as tannewt.
Thank you! Will merge and we can double check it works.
@jepler Can be the sole reviewer. @hierophect you'll want to check fix the CI.
This looks a bit fishy:
- https://github.com/adafruit/circuitpython/blob/main/shared-module/audiocore/WaveFile.c#L268-L279
- https://github.com/adafruit/circuitpython/blob/main/ports/nrf/common-hal/audiopwmio/PWMAudioOut.c#L252-L265
- https://github.com/adafruit/circuitpython/blob/main/ports/nrf/common-hal/audiopwmio/PWMAudioOut.c#L98-L102
- https://github.com/adafruit/circuitpython/blob/main/shared-module/audiocore/WaveFile.c#L186-L209
Also, is `audioio_wavefile_max_buffer_lengt...
Just a couple questions and suggestion about using the RGB led for CircuitPython status. Here is an example: https://github.com/adafruit/circuitpython/blob/main/ports/nrf/boards/particle_argon/mpconfigboard.h#L35-L37
Is this a tri-color LED? It can be setup as a CircuitPython status LED.
Ok, sorry I didn't notice this when creating the PR. There might be probably a few more such cases.
@tannewt Uh, this again merged into master, even though I specifically made it against main.
@tannewt sounds good. Translations fix pushed, hopefully that will resolve CI issue. I'm currently investigating a PulseIn regression on main that I may want to fold into this.
@gilded cradle On Monday during the meeting can you paste the newsletter links in? I'll be mostly running the meeting, and Kattni will be doing the recording so she doesn't want to be entering stuff in her discord client.
huh, apparently common_hal_mcu_disable_interrupts is pretty expensive on nRF
@onyx hinge Do you have a minute to chat about background tasks? I have to add a background task to the general-purpose HCI _bleio code I'm writing, and would have to add it to every run_background_tasks() in all the ports. There is a lot of duplicate code in the multiple impls of that routine.
In your recent work on background tasks, are you refactoring any of this into some shared routine?
sort of
huh, apparently common_hal_mcu_disable_interrupts is pretty expensive on nRF
@onyx hinge Yes, it has to keep the BLE stuff running, so it can't really just disable all inteerrupts.
I am focused primarily on making certain things happen due to interrupts, and those things are then pulled out of the per-port run_background_tasks
I don't think that'll get me to them being 100% identical but a good thing to do while I'm there would be to pull out the common parts into a supervisor function
right, I expect there to be some per-port stuff, but they all have to check for usb, display, filesystem, etc. background tasks. I will just continue not assuming that but will be happy to adapt when I have to merge in and you have probably already merge in
what time frame are you operating in? nRF went fast (I think that after my addition to that PR just now, it is faster than 5.3 and probably works right 🙂 but I didn't test the audop peripherals)
oh, at least a week before any PR, and that would be incomplete functionality. There is a lot to do
but that leaves stm, esp32, cxd, imxrt, etc
and litex, which I don't have hardware to test on. bummer.
OK, I think you should get your wish but I'm just not ready to guarantee it'll come in time
The bootloader allows you to load CircuitPython, Makecode, and Arduino programs. The bootloader is not CircuitPython. You can check the current version of your bootloader by looking in the INFO_UF2.TXT file when the BOOT drive is visible (FEATHERBOOT, CPLAYBOOT, etc.).
hm this boilerplate about what the UF2 bootloader enables is probably the same on all the boards, but .. I'm pretty sure https://circuitpython.org/board/same54_xplained/ doesn't support Makecode and idk about Arduino

The SAM E54 Xplained Pro evaluation kit is a hardware platform for evaluating the ATSAME54P20A microcontroller (MCU). Supported by the Studio integrated development platform, the kit provides easy access to the features of the ATSAME54P20A and explains how to integrate the dev...
i wrote that boilerplate, I can caveat it.
the device also doesn't ship with uf2 bootloader so the updater won't do many people any good ; but I think that since circuitpython is placed "above" the bootloader, it is probably needed before you load circuitpython on it. I did everything with the debug usb port of course
you need a different linker script to work on a bare board, right?
you can turn off the bootloader updater box in circuitpython.org for that board if you want
only because the origin is different
i would not recommend changing the linker script, I would say CPy is not supported unless you install a bootloader
How's this sound?
CircuitPython requires that the board be flashed with the UF2 bootloader. This can be done using the second USB connector, which provides a debug interface. After this has been done once, CircuitPython can be updated in the usual way using the UF2 bootloader, or by using the debug USB connector.
would you add that to board description? The UF2 update boilerplate is shared across all the atmel-samd boards
Yea I'm imagining that is going in the board md file above the bullet list of features
It also seems like the board doesn't actually run unless you have the debug interface going which is weird .. but maybe that's how they wanted it
i think that's fine. We are talking about order-of-magnitude 10 people I think who will try this
yeah, agreed
Images automagically compressed by Calibre's image-actions ✨
Compression reduced images by 46.7%, saving 499.43 KB
| Filename | Before | After | Improvement |
|---|---|---|---|
assets/images/boards/large/fluff_m0.jpg |
197.32 KB | 84.00 KB | -57.4% |
assets/images/boards/large/same54_xplained.jpg |
107.12 KB | 65.59 KB | -38.8% |
assets/images/boards/original/fluff_m0.jpg |
323.53 KB | 150... |
@deshipu we haven't swapped this repo to main yet so it's correct.
Sure @onyx hinge Do you just have them lined up beforehand?
@gilded cradle yeah the links will be in the notes doc, copying them from the newsletter draft is something I will have done shortly before the meeting
what I've done when I'm in the "pasting links" role is try to paste them when the speaker is starting to talk about that item. it's not critical.
If there are multiple links, I often pick just one, according to my feelings. If there's a non-twitter link, I use that one 🙂
/usr/bin/../lib/gcc/arm-none-eabi/9.2.1/../../../../arm-none-eabi/bin/ld: build-feather_stm32f405_express/lib/protomatter/core.o: in function `TIM6_DAC_IRQHandler':
/home/runner/work/circuitpython/circuitpython/ports/stm/../../lib/protomatter/arch.h:811: multiple definition of `TIM6_DAC_IRQHandler'; build-feather_stm32f405_express/peripherals/timers.o:/home/runner/work/circuitpython/circuitpython/ports/stm/peripherals/timers.c:341: first defined here
protomatter will need to be ...
Ah, ok. Thanks
none of it is critical, but I always liked the links appearing in the channel when PT did it, so I spontaneously started doing it when he had to step back
With the latest changes performance on nRF is a bit better than the 5.3.0 baseline (now testing on Particle Xenon).
| version | time |
|---|---|
| 5.3.0 | 2.24s |
| 6.0.0.a1 | 3.04s |
| this PR | 2.22ss |
I suspect the 5.3.0 performance of the Xenon is better than the CLUE because the latter has a displayio display enabled. However, I didn't test the theory.
@ionic elk okay, I was catching up on review requests and noticed it
👍
Backport the pixelbuf RGBW fix.
This way we don't need to load the whole string version of the
json into memory.
@hybrid urchin hey! I got my orangecrab today!
\o/
guess what I want to do? 🙂
I'm pretty sure I know what you want to see running on it 😛
😄 I assume I want to start with the litex port we have
I'll write up a quick guide and make sure everything is still working. It's been a little while since I've had it running.
ooooh, even better. I didn't know you've had it going
do you have it going with the ram and flash?
Yep! But that was basically all. Didn't have I/O or extra peripherials.
kk, that's a start
digitalio and busio are the next things
I'm really interested in SoC design too
how fast can you clock the cpu?
you are using litex for the SoC right?
With the VexRiscv max speed is around 80MHz. I've gennerally had it set at 72MHz. There are lots of knobs to turn if you wanted to tune for performance.
Yep.
With the current configuration litex supports, the DDR3 memory runs at 2x CPU speed.
haha nice!
So I've been spliting the 128MB DDR3 into two areas for firmware/data. And there is a small routine that runs on startup that inits the DDR3, and copies the FLASH into the DDR3 memory space.
that makes sense! it's still way more ram than we have on any other CP board
@hybrid urchin is your repo public in case I want to poke at it later?
Yep, I'm re-working the litex SoC side. It's bitrotted a bit. But that will be here: https://github.com/gregdavill/OrangeCrab-examples

GitHub
Example projects/code for the OrangeCrab. Contribute to gregdavill/OrangeCrab-examples development by creating an account on GitHub.
And the small number of changes I've made on Circuit python will need to be rebased. But that's on my fork: https://github.com/gregdavill/circuitpython/tree/orangecrab
GitHub
CircuitPython - a Python implementation for teaching coding with microcontrollers - gregdavill/circuitpython
ok awesome! Let me know when the SoC is available. I2C support will add support for most featherwings
it would be nice to have an iomatrix too. I know it's antithetical to fgpa design
Cool, iomatrix? is that for interfacing to pin-muxing?
ya, to change peripheral to output pin mapping from circuitpython
k, I gotta make dinner. thanks! very exciting
Yes. Using one of them as status LED sounds good. Thanks for the hint.
I thought it may be used to identify the board as nrf52840 mdk has one.
should remove it.
Okay, I've pushed my test SoC. and some small changes to get it building. But it's from april and ~1000 commits behind the main branch.
Adafruit CircuitPython 5.2.0-24-gc88db8a4e-dirty on 2020-07-11; OrangeCrab with VexRiscv
>>>
Are MICROPY_HW_RGB_LED_RED, MICROPY_HW_RGB_LED_GREEN and MICROPY_HW_RGB_LED_BLUE necessary? Didn't find them being used.
Initial starting point for adding the OrangeCrab board to the Litex port.
The procedure to actually run on the hardware is currently a little bit different from how the fomu port works.
You currently have to build the SoC that CircuitPython will run on, then combine the two into a single file that gets loaded onto the OrangeCrab. (There are ways we can decouple the SoC from the firmware, but this is the easiest way to get started)
See guide here: https://github.com/gregdavill/OrangeCr...
Are
MICROPY_HW_RGB_LED_RED,MICROPY_HW_RGB_LED_GREENandMICROPY_HW_RGB_LED_BLUEnecessary? Didn't find them being used.
Looks like I have the wrong defines. Looks like it should be CP_RGB_STATUS_R: https://github.com/adafruit/circuitpython/blob/main/supervisor/shared/rgb_led_status.c#L147
This code looks wrong for some values https://github.com/adafruit/circuitpython/blob/82427612d15ac85d0a34132ace7f8369dacd66ef/shared-module/audiocore/WaveFile.c#L223=L237
For length_read of 4 it's ok, 6 happens to work, but 5 and 7 would be problematic as they would yield pad lengths of 1 and 3, respectively, rather than the desired 3 and 1. I suspect that was intended to say something like:
uint32_t pad = sizeof(uint32_t) - length_read % sizeof(uint32_t);
I...
I think you're right about the first thing, please pull request the change especially if you have a test case.
I also think you're right that the intent of this code is to ensure that the size of the buffer returned to the caller is always a multiple of 4 bytes long, no matter whether it's 1 or 2 samples, 8 or 16 bit samples. (however, raw samples can be any length so the actual audio hal implementations can't depend on this in general)
Note that when looping samples are involved, they...
My simple test program has run for 2367 rounds and 3917 rounds without a problem. I'll leave it running for rest of today.
Does the nordic software device code do any malloc'ing, btw?
Does the nordic software device code do any
malloc'ing, btw?
No, the nrfx library is a wrapper for the SoftDevice, and does no allocation itself. (I double-checked.) The SoftDevice uses a fixed reserved area of RAM for its storage needs
With Circuit Python on a larger FPGA like the ECP5, you could probably make configurable IO "cells" which each contain one of each peripheral. This would allow you to uses as many of any peripheral as you have pins for.
That makes sense! You might still want/need some form of muxing with modules that would span over multiple io cells though? for example SPI/I2C
That's how the Parallax Propeller 2 smart pins work. The XMOS chips also use a similar method where pins/ports can can be in/out/both and can be clocked by another pin or an internal clock that can optionally be exposed on a pin.
Both of these methods use generic logic that can be configured to act as various peripherals though, so they require more software support.
@hybrid urchin I wasn't able to build the soc
4.39. Executing DFFLEGALIZE pass (convert FFs to types supported by the target).
ERROR: Conflicting init values for signal 1'0 (\soc_basesoc_interface_adr [5] = 1'x != 1'0).
Ohh, yeah. There is bug that a recent Yosys change has un-covered. Perfect timing right 😛
GitHub
When building the litex CircuitPython SoC example with Yosys eef0ec6a, the following error is encountered: 4.39. Executing DFFLEGALIZE pass (convert FFs to types supported by the target). ERROR: Co...
ok, perfect
I think the easiest solution if you want to be able to build the SoC yourself, is to roll back to a earlier Yosys build. Otherwise I've put some prebuilt files up in a new branch: https://github.com/gregdavill/OrangeCrab-examples/tree/prebuilt/litex
GitHub
Example projects/code for the OrangeCrab. Contribute to gregdavill/OrangeCrab-examples development by creating an account on GitHub.
ok, let me go snag an older toolchain zip
kk, will try now
I'll try it here too, just to make sure I'm not sending you down a rabbit hole.
idk if anyone ever wondered about it, but CircuitPython on the SAMD21 should take about 12us (2 * 5.67) to do an ADC conversion, and it won't be accurate if the input impedance is higher than 7kOhm.
As far as I can tell, Arduino's config is almost identical but they bump up samplelen to 2 which increases their total conversion time to about 14us (6.67 * 2) but also increases their max input impedance to ~60kOhm.
might be worth considering for us, as 7kOhm is pretty low especially if someone uses a 100k pot as a voltage divider to feed an analog input.
@ivory yew I found this useful, probably you've already seen it: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-42645-ADC-Configurations-with-Examples_ApplicationNote_AT11481.pdf
Is our clock rate 1.5MHz as you set above in the calculator? I think we are using GLCK0 (48 Mhz) as the clock (ports/atmel-samd/peripherals/samd/samd21/adc.c): I don't see that we are setting the clock divider at all in common-hal/analogio/AnalogIn.c, so it looks like it might the default CTRLB.PRESCALER set to 0x0, which is divide by 4.
Hi,
Requesting a VID/PID for a new Circuitpython, Feather form factor based board call TinkeringTech Scoutmakes Azul.
Will be submitting a PR to add to CP. Its based on the Adafruit nRF52840 express with some additions:
-128x32 OLED built-in
-USB type C
-Power switch
At the home stretch of getting the boards out.
https://www.instagram.com/p/CBdmkFbJNzQ
Thanks for the work on CP!
@tulip sleet iirc the prescaler is set in asf_conf
aha, forgot that
// <o> Prescaler configuration
// <0x0=>Peripheral clock divided by 4
// <0x1=>Peripheral clock divided by 8
// <0x2=>Peripheral clock divided by 16
// <0x3=>Peripheral clock divided by 32
// <0x4=>Peripheral clock divided by 64
// <0x5=>Peripheral clock divided by 128
// <0x6=>Peripheral clock divided by 256
// <0x7=>Peripheral clock divided by 512
// <i> These bits define the ADC clock relative to the peripheral clock (PRESCALER)
// <id> adc_prescaler
#ifndef CONF_ADC_0_PRESCALER
#define CONF_ADC_0_PRESCALER 0x3
#endif
yes
when we were first doing all this we tried to be approximately like Arduino, so as not to surprise people migrating over. But I would not be surprised that we lost track of that when I was converting from ASF3 to ASF4.
I think Arduino changed things recently as well, but I'm not sure.
?serverinfo
Owner
adafruit#3230
Region
us-west
Channel Categories
8
Text Channels
53
Voice Channels
6
Members
22098
Roles
32
ID: 327254708534116352 | Server Created
·
This is not a new issue, I tested as far back as CP 5.0 with similar results. The issue seems to be that when a compute-intensive instruction is being run (and the 'a = 2**(65536*2)' takes about 4 seconds) there are no breaks to run any background tasks. As a result, the USB handshakes and commands take a very long time to complete. The only calls to run_background() happen when we move to the next line in the WHILE loop. Maybe we are getting one command through at a time?? Should there be so...
The longint operations are single virtual machine opcodes; the background task running does not happen during that time. That's the basic problem. We could sprinkle calls to run background tasks through the longint code, but we need to make sure that does not violate some assumptions the VM has about opcode atomicity.
Left test code running on one CLUE today using random buffer_size for each listening period to start_scan between 512 and 1800. That ran fine for 5207 runs.
Relatedly, the current linker file only correctly implements the required workaround if SOFTDEVICE_RAM_SIZE is a multiple of 8K of at most 56K. The workaround is to give the SPIM3 a dedicated physical RAM block, and there are eight lower RAM blocks with a size of 8K and one 192K upper RAM block.
Also, I believe https://github.com/adafruit/circuitpython/blob/37e77b21cd3e33b00675310e4070e115d3c2357c/ports/nrf/boards/common.template.ld#L44 should be + LENGTH(SPIM3_RAM).
PS. Thanks for...
Relatedly, the current linker file only correctly implements the required workaround if
SOFTDEVICE_RAM_SIZEis a multiple of 8K of at most 56K.
Right, this should be noted in a comment. The SOFTDEVICE_RAM_SIZE was determined by trial and error, and I always meant it to be a multiple of 8K.
Also, I believe
should be
+ LENGTH(SPIM3_RAM).
...
Do note that 64K of softdevice RAM (current default) puts the SPIM3 area in the same block as all the other application RAM.
大家好。有人愿意帮我核实一下我的账户吗?愿意帮助任何stm32讨论。
@hierophect What is your wechat? May I add you to discuss the STM32 series
Hi @dahanzimin, I have not been able to get a wechat because I do not know any mainland Chinese people who can help me with security verification. Would you be interested in helping me verify my account? I would love to discuss the STM32.
I'm closing this for now, not really getting the desired response from the supplier and the boards I have seem to have been discontinued in favour of some other versions. Might revisit this in the future.
What's the minimum I need to do to see an nrf device in the bluefruit connect device? Just having it powered is not enough?
ok got it
@tulip sleet okay, whee, it looks like I have successfully moved the BLE background stuff into supervisor code while working on this stuff
...
+ #if CIRCUITPY_BLEIO
+ supervisor_bluetooth_background();
+ bonding_background();
+ #endif
...
}```does that seem like it will fit your needs?
like you noticed the background functions are mostly similar, they call functions guarded by #if enables and bleio maybe fits into that mold
I ended up doing this myself too, but I need to add a bleio-hci-specific background task as well, so I ended up create a bleio_background(). WIP Commit is here: https://github.com/dhalbert/circuitpython/commit/f6869c69c5fda701b57fbfca0eaf1aa03a2d164b. I don't need you fix whatever you have now: I'll adapt it as necessary when I merge from upstream before submitting a PR.
Requires adafruit/Adafruit_Protomatter#14
That sounds good, if I get there second I'll deal with the merge conflicts
@onyx hinge My question about the protomatter merge conflict is more that the merge conflict is actively wrong? It claims there's duplicated code when there is no such thing. It's suggesting I have two copies of #define _PM_pinOutput(pin_) do { when you can look at the code and see that's not the case.
In my experience, it doesn't matter whether I think git is wrong, I still have to deal with reality as git presents it to me. Sounds weird though.
I don't mean to just complain about it I was simply confused about how to solve it
I intended my advice to be constructive, so I hope you'll accept it in that vein even if it was useless
if it's that weird I'd probably just manually make my edits on a fresh branch at the tip of master
No no it's all good I didn't mean it like that. I was just wondering if you knew about why it was doing the weird conflict message. Your suggestion is fine and might solve it anyway - which commit should I try to target, though, if master isn't working?
I'd just say fix it while you're in there
I am PRETTY sure it's utterly trivial to fix
but y'know .. when I'm wrong, don't hesitate to raise the issue again
@riggs You are right, I see what you mean. I missed the non-uniform size of the RAM blocks. I will open a new issue for this.
So ST, in their infinite wisdom, decided to name an enum value for their TIM6 IRQ two different things across chip families - TIM6_DAC_IRQn vs TIM6_IRQn. Is there any way for me to actually check whether an enum value like this is defined, like I can a macro?
Right now I get undeclared here (not in a function) errors but I don't know how to fix this for an enum?
@riggs points out in #2946 that the nRF52840 has 8 8kB RAM blocks (RAM0 - RAM7), in the first 64kB of RAM. But we are currently using all those blocks for the SoftDevice application RAM (SOFTDEVICE_RAM_SIZE == 64kB). So the SPIM3 8kB block we reserved to overcome the SPIM3 erratum is too high in RAM, and is in RAM block RAM8, which is 192kB, not 8kB.
It appears that the SoftDevice RAM region must start at 0x0, so we cannot swap things around to fix this. Instead, we must reduce the size ...
@onyx hinge @tulip sleet do you have hardware that would be affected by this issue: https://github.com/v923z/micropython-ulab/issues/132 ? I think the solution is in upstream micropython. I will try to produce a fix today, and I just wanted to pass the information along, in case circuitpython has to be patched up, too.

GitHub
Using source code of ulab v0.51.1 & MicroPython v1.12-623-gf743bd3d2 2020-07-13, compiling on Manjaro Linux v20.0.3 + arm-none-eabi-cpp 8-2019-q3-update 8.3.1 20190703. Error building/linki...
@lapis hemlock no, we don't use double-precision on any of our hardware
Hi @dahanzimin, I have not been able to get a wechat because I do not know any mainland Chinese people who can help me with security verification. Would you be interested in helping me verify my account? I would love to discuss the STM32.
I'm very happy. I understand that you need to download the wechat app and register with your mobile phone number. Of course, I haven't registered wechat overseas, or how can I help you complete the security certification
@onyx hinge OK, thanks for the feedback!
Hi @dahanzimin, I have not been able to get a wechat because I do not know any mainland Chinese people who can help me with security verification. Would you be interested in helping me verify my account? I would love to discuss the STM32.
@hierophect I Baidu, need security authentication QR code, you send me email, I help you authentication, 353767514@qq.com
Would it be possible (or reasonable) to use a timer at the start of such
operations to provide interrupts where background tasks could be run?
On Sun, Jul 12, 2020 at 5:58 PM Dan Halbert notifications@github.com
wrote:
The longint operations are single virtual machine opcodes; the background
task running does not happen during that time. That's the basic problem. We
could sprinkle calls to run background tasks through the longint code, but
we need to make sure that does not violat...
<@&356864093652516868> The weekly meeting is coming up in about 10 minutes! Hope to see you there. Please, if you can add your hug reports and status updates to the doc, it's super helpful. And if you'll be lurking (just listening in), it's also super helpful to note that too

Google Docs
CircuitPython Weekly for July 13th, 2020 Welcome to the CircuitPython Weekly meeting notes! Feel free to add your Hug Reports and Status Updates early. During the meeting, we go through them as a round robin sorted by username. If you can’t make the meeting and would still ...
@slender iron just a reminder -- I would like you to do the overall section when we get into the state of circuitpython (as well as the core)
@gilded cradle will you be able to paste relevant links out of the notes doc as we go along?
Good afternoon all you wonderful folks -- happily lurking today, and I've updated the doc to reflect as such 🙂
?serverinfo
Owner
adafruit#3230
Region
us-west
Channel Categories
8
Text Channels
53
Voice Channels
6
Members
22131
Roles
32
ID: 327254708534116352 | Server Created
·
@onyx hinge yes. All prepared.
@gilded cradle appreciated very much
If anyone would like to do mic checks before we get started, now is a great time. Five minutes from now is too late
🚫 🐿️
lurking
lurking
riiiiight
I wish I had a GoXLR setup to pitch-shift my voice to sound like a chipmunk....because I'd never do that. That'd be mean 😛 🐿️
Lurking today
alurkin'
Discord
Welcome to the Adafruit community! Share your DIY projects, electronics, python, Raspberry Pi, Arduino, and more here! | 22,131 members
Google Docs
CircuitPython Weekly for July 13th, 2020 Welcome to the CircuitPython Weekly meeting notes! Feel free to add your Hug Reports and Status Updates early. During the meeting, we go through them as a round robin sorted by username. If you can’t make the meeting and would still ...
Lurking.
Text only

Fill out the "Build Something Real This Summer." form quickly and securely on Airtable.
@quartz patio @pine rampart are you just listening to the meeting? (aka lurking)

makerdiary
M60 Mechanical Keyboard is an Open Source, USB & BLE 5.0, Modular, Hot-Swappable, 60% Keyboard powered by Python. M60 uses Nordic’s nRF52840 SoC to provide USB Type-C wired and Bluetooth LE 5.0 wireless connectivity. To take advantage of the removable M.2 module and hot-swap s...
Discord
Welcome to the Adafruit community! Share your DIY projects, electronics, python, Raspberry Pi, Arduino, and more here! | 22,131 members

This video is Part 1 of My Custom Animated RGB LED Scrolling Message Sign Series and it covers the assembly of the sign and everything you need to do to build the hardware.
3D Printable Parts
https://www.thingiverse.com/thing:4539796
*************...
Introducing Serpano, a @CircuitPython dev board designed for breadboards. It delivers 3.3V@2A+5V@2A, an adjustable 1.8-12V@3A, current measurement, and a Feather-ish pinout. It can be powered from USB, a 4.5-12V DC jack, or a LiPo. Also includes a 1.3" 240x240 LCD for dataviz...
Likes
244

Updated my CircuitPython port!
https://t.co/MyoFvKIDcG
Hopefully we can get this merged and then start adding cool some FPGA features ^_^
14216 bytes used, 117426296 bytes free in ram ;)
🐍 + 🍊🦀
Likes
102

GitHub
Community newsletter for python on microcontrollers - adafruit/circuitpython-weekly-newsletter
Solar-powered blogs don't cast any shade 🙂
Testing on CP 6.0.0-alpha.1; the issue no longer reproduces for me.
💯
Happy to translate.
Hug to @onyx hinge specifically for the ulab learning guide. It's an excellent guide for the newbee (me).
Yey, two @idle owls are better than one.
ImitationKattni has been asked kindly to follow the Code of Conduct. 😉
The Kattni from the Alternate Universe ((c) Star Trek) is a bit rowdy
influxdb and grafana are great for storing sensor data too
@lone axle Can I have Pybadger library support for CLUE too and Mini PiTFT 240x240? And then I don't have to do anything anymore.
I am only lurking today.
welcome!
@thorny jay Pybadger does support CLUE already. I think Kattni added it back around the time the CLUE came out to prepare for PyCon. https://github.com/adafruit/Adafruit_CircuitPython_PyBadger/blob/master/adafruit_pybadger/clue.py The CPB Port was largely based on the CLUE one.
GitHub
Contribute to adafruit/Adafruit_CircuitPython_PyBadger development by creating an account on GitHub.
The comprehensive Add-on boards & GPIO Pinout guide for the Raspberry Pi
@slender iron would probably make sense to do pulseIO since I've been working on it recently for i.MX/STM recently anyway
sure! (mute your mic too)
whoops srry
np
anyway, still need to get a control up and going for the ESP so I'll try and do that this week sometime
kk, great!
here is one place featherwings are documented: https://learn.adafruit.com/adafruit-feather/community-feathers-wings

It's a GitHub Awesome list
GitHub
A curated list of awesome Feather form factor boards, guides, videos, libraries, software and resources. - adafruit/awesome-feather
Beat ya
yup 🙂
It is a lot of data
The 'Wing product pages have some info on compatible Feathers where things are a bit tricky
And third party boards can be very challenging
Me too
Me too, no audio
Oups...
@thorny jay can you hear us?
No
Ok.
You may need to restart discord
close the meeting
we're trying to note it better on the downloads page and PRs welcome where we miss it
Thanks all
Thanks!
Thanks
Thanks for hosting @onyx hinge, was excellent.
By
Indeed, excellent job @onyx hinge!
@thorny jay Thanks for noting the limitation of the Espruino, pull requesting a change would have been perfectly appropriate
You did great
We need to neotrellis that.
And I really like the sound of your voice and how you have a sentence for everybody.
And also give a warning to the next next speaker.
That is really great @onyx hinge
Here is the compatiblity check: https://pinout.xyz/phatstack
It is cross reference Youtube link to Github and Github link to Youtube.
How do you go from GoogleDoc to MarkDown?
Ok
Chronological order.
Monotonic(?)
Yes but not reverse way!!!
Bye!
@idle owl I don't have github permissions on https://github.com/adafruit/adafruit-circuitpython-weekly-meeting
GitHub
Notes from the weekly circuitpython meetings on Discord - adafruit/adafruit-circuitpython-weekly-meeting
I could still steam ahead, it would just make a pull request
You’re making changes in a project you don’t have write access to. Submitting a change will write it to a new branch in your fork jepler/adafruit-circuitpython-weekly-meeting, so you can send a pull request.
I added this as a prereq in the doc
@onyx hinge added you to the circuitpython team and gave that team notes permission
👍
@onyx hinge Thanks for adding it as a prereq to the doc.
Please make a PR to add a note to the board page: https://github.com/adafruit/circuitpython-org/blob/master/_board/espruino_wifi.md
This file has a similar warning for USB: https://github.com/adafruit/circuitpython-org/blob/master/_board/espressif_saola_1_wroom.md
It should probably warning WiFi is unsupported as well.
@RetireeJay46 Can you try 6.0.0-alpha.1 and let us know if it works now? Thanks!
Background tasks need to run at a "safe' time, when there isn't a storage operation in progress, etc. It is probably possible to add calls to check for background tasks before the storage allocations in the longint code.
Though it's not good the longint code locks out background tasks, it would be good to know the use case for doing longint operations with huge operands. When you first found this, were you trying to compute something, or was it just to see how well the longints work?
Here is the notes document for next Monday’s CircuitPython Weekly meeting. It is at the normal time of 11am Pacific / 2pm Eastern here on Discord. Everyone is encouraged to attend! Please add your hug reports and status updates even if you’ll be attending the meeting - it’s super helpful! If you are unable to attend but would still like to include updates, feel free to include them in the notes and we’ll read them off during the meeting. Hope to see you there! <@&356864093652516868>
https://docs.google.com/document/d/19NJ_m-fbOBJ0c8wJegVMbbPcAgov1M5oxxr7oxwlxbo/edit?usp=sharing

Google Docs
CircuitPython Weekly for July 20, 2020 Here is the notes document for Monday’s CircuitPython Weekly meeting. It is at the normal time of 11am Pacific / 2pm Eastern here on Discord. Everyone is encouraged to attend! Please add your hug reports and status updates even if you’l...
@dahanzimin I'm on WeChat as tannewt and we have a CircuitPython group setup I'll invite you to.
@dhalbert I'm not sure how to tell github that I made the changes that were requested, in any case, I did.
This looks good! Thanks for the changes.
Ok, PixelBuf has been released and everyone loves the speed. Huge thanks to @rhooper for PixelBuf and @dunkmann00 for helping get it finished.
[adafruit/circuitpython] New tag created: 5\.3\.1
Automated website update for release 5.3.1 by Blinka.
Anyone object to removing displayio.Shape in 6.0.0? I don't think anyone uses it.
vectorio is probably better anyway
FYI, I changed the base branch to main. We no longer are using master.
I also did the merge in your master branch so make sure and pull from GitHub if you use that branch locally.
@gregdavill What do you think about checking in a pre-built version of the SoC? That way we could generate the combined file and host it on circuitpython.org/downloads.
@xobs should take a look too.
Should this be under generated too?
Update this. m is multiply and divide right?
Does all code get moved into RAM? How is that done?
6.x versions of the bundle are now available: https://github.com/adafruit/Adafruit_CircuitPython_Bundle/releases/tag/20200711
@dherrada What is the status of this PR? Are you waiting on someone?
Looks good! Let's get this in.
Translations update from Weblate for CircuitPython/main.
Hi, thanks for noticing this. I tested UART.readline() with 5.2.0:
readline() does not return a string, it returns a bytes. It returns None if there's nothing to read,. regardless of timeout = or > 0. It will return everything in the UART buffer when the timeout is reached, except that if there's a \n in the buffer, it will return only up to and including the next\n.
It should probably be noted that newline means exactly that; \n, and not \r. When testing I noted that ...
Closing for now. Anyone should feel free to pick this branch up and make a new PR.
My concern as-is is that the returned object should have a Python API that is a subset of the object returned in CPython. I don't care how it is implemented internally.
Updated 12 days ago to 0.51.1
This is done with 6.0.0-alpha.1
@jepler Does your SDIO work improve this?
We should check this soon because we have new RGB Matrix projects in the pipeline.
@kattni Did you have a chance to look at this at all?
This is fixed by #3043. Thanks @DavePutz!
Tricolor status LEDs should use three PWMOuts to produce the status color. When a user attempts to use any of the three pins, the PWM should be deinit to free the pin for the user. After the pin is deinit by user code, the RGB status LED should reinitialize it and continue to use it.
I haven't seen this recently and suspect GitHub Actions as the issue. So, closing this.
@caternuson want to see if you can reproduce this?
Closing this in favor of other SDIO issue #3095
Thank you! We're excited for these boards!
They are now released as bin and uf2.
@hierophect Are you able to reproduce this?
@dhalbert Still want to do this in 6.0.0 or punt to 7.0.0?
#2368 should fix this.
I'm going to close this because we now have native MP3 playback.
@dhalbert This is fixed with the bootloader update right?
@deshipu Is this still an issue with 6.x?
I'm going to assume this is fixed by the switch to using the RTC for timing. Please comment if it's not fixed.
Closing. Folks can add me on WeChat and I'll add you to the group.
Ok, I did a decent issue sweep. Didn't go through all of Long Term. I bet there are more issues we can close
Yes, that would make sense.
Currently that is handled by the LiteX bios. On startup the following things happen:
- SoC starts executing at 0x00000000, this memory is frimware embedded in the gateware (litex bios).
- We configure and validate that the DDR3 controller and memory is running correctly
- We look in FLASH for a RISCV firmware. 0x20100000 the firmware is prefixed with a crc32 and length.
- If crc check passes the firmware is copied into DDR3 memory address space, 0x40000000.
- We jump to 0x40000000.
It...
Yes, sdcard-in-core and sdio both improve on this, unless I overlooked something. I did not specifically test for this, the following's based on my thoughts about how shifting things into the C core will relate to background tasks.
If you use either of these instead of adafruit_sdcard, then it is not possible to enter background tasks during an SD card I/O operation, so the case of reading/writing SD in the foreground will not cause any problem (other than a delay) if background tasks als...
Yes, I'll fix that.
It will be possible to simply reset the board, but with the current bootloader I'm not sure we can perform a "reset into the bootloader", the multi-boot features are different on ECP5 as they are on the ice40. In it's current form the bootloader is watching for the button to be pressed.
I'll need to think how we can handle this, it may require using volatile bits in a FLASH config register.
@slender iron thank you for doing that! I don't know if it felt like a slog to you but from over here it is a great reminder that we've been getting things done. Go team! go community!
I think I can set-up a ci system, which builds the SoC and packages up the bitstream and generated headers, then you can include a tagged release?
I know Mithro has been talking about a "device-tree" like system. Which would ideally enable the SoC and CP/uP to be completely decoupled, but that's a reasonable amount of work to implement. Especially if it's only used by 1 platform.
It now works on my system. Thanks!!
These examples=are still unresolved, I believe, and a bunch more above in displayio and framebuffer. You have to open the "hidden" conversations to see them.
(screenshots below: don't try to click :) )


Ok to move to 7.0.0. I'll change the milestone.
Added a call to RUN_BACKGROUND_TASKS in the loop in mpn_mul(). This allows USB requests to be processed during long-running multiplications. Tests were also run to check performance impact. Surprisingly, when using the test script from issue 2949 there was a 3-5% performance improvement with the change. Note that the second test mentioned in that issue (running 10**40000 from REPL) is not really affected by this patch, as tracing shows that the time for that command is actually being spent i...
RUN_BACKGROUND_TASKS is not necessarily that cheap. I would suggest testing the performance impact on loops doing much shorter longint manipulations, such as multiplying two numbers that are only a couple of 32-bit words long. The #2949 code seems pretty pathological to me.
If we really want to worry about this, then I think we could check the lengths and only do this every <n> words, where n is order-of-magnitude 100 or 1000 or whatever. Or we could monitor a tick counter in an efficien...
I have run multiple tests, using both short and long numbers; and the
version with the change to run background tasks
always is faster (1-5%) than the standard version. I currently have no
rationale for this; but the results are consistent.
So, I don't think there is a significant cost to the suggested change.
I will see what the performance impact of counting ticks would be; but
since just calling RUN_BACKGROUND_TASKS doesn't
seem to be costing us anything I'm not sure what the benefit would...
Hi,
I need to use usb_hid for a Braille Display. Currently I am using a custom
USB Descriptor and every time I am sending an OUT Report to the Itsybitsy M4 Express,
the usb_hid device implementation calls the wrong callback function. By sending an OUT Report, instead of entering
the "hidd_control_complete"(circuitpython/lib/tinyusb/src/class/hid/hid_device.c)
function, it enters the "hidd_xfer_cb"(circuitpython/lib/tinyusb/src/class/hid/hid_device.c)
function which calls "tud_...
Like @dhalbert I am surprised at your benchmark results. At the tip of main, RUN_BACKGROUND_TASKS is fairly expensive (relative to 5.3.0) and I am working on addressing that at #2879.
If the finding that there's no important performance reduction (or indeed if there's a performance increase) with #2879 merged is duplicated, I think it makes total sense for this to go in.
When #2979 does land, supervisor_run_background_tasks_if_tick() (which is what RUN_BACKGROUND_TASKS expands to...
BTW, not that relevant to this issue but on the reacting within 700ms front, do you mean 70ms? One of my learn guides featured testing this using a CPX. Just under 200ms is generally achievable if you're very focussed and finger is resting on the button. Sub 250ms isn't too difficult and that includes a 74 year old friend in a noisy cafe. Graphs here: https://learn.adafruit.com/circuit-playground-bluefruit-quick-draw-duo/reaction-timer-results
BTW, not that relevant to this issue but on the reacting within 700ms front, do you mean 70ms? One of my learn guides featured testing this using a CPX. Just under 200ms is generally achievable if you're very focussed and finger is resting on the button. Sub 250ms isn't too difficult and that includes a 74 year old friend in a noisy cafe. Graphs here: https://learn.adafruit.com/circuit-playground-bluefruit-quick-draw-duo/reaction-timer-results
Imm not sure what you mean about 70ms. There...
Bluetooth Low Energy advertises over one of three channels by design. This design is intended to reduce the chance of congestion or jamming breaking the advertising mechanism. In general, this makes a lot of sense in an uncontrolled environment but for some uses this isn't optimal as the expected number of received packets is 1/3 of transmissions.
- For exchanging data within a room which might be a classroom, I suspect the single channel approach is superior in terms of low-loss communic...
RUN_BACKGROUND_TASKS cannot take negative time. So I think there may be something wrong with the timekeeping if inserting it causes the tests to appear to run faster. A way to check this would be to do some kind of "wall clock" check, such as toggling a pin before and after the operation, and measuring the pin-toggle time with a Saleae or similar.
Another thing that might be happening is that inserting RUN_BACKGROUND_TASKS is causing the longint operation to be truncated or not finishe...
I think this might be the same issue as #2348. We haven't tried to implement host-to-device reports yet, so anything that's there may be wrong, as I think you've discovered.
Addition and subtraction are probably quite quick relative to multiplication; and adding it to multiplication gets ** powers too. Division would be similarly long-running as multiplication. (think of how we write out addition and multiplication long-hand; you write down a "lot more" when multiplying two numbers than when adding two numbers. The performance of the "mpz" multiplication and addition code roughly mirrors the number of digits you'd write down doing long-hand arithmetic; heavy...
Bluetooth Low Energy advertises over one of three channels by design. This design is intended to reduce the chance of congestion or jamming breaking the advertising mechanism. In general, this makes a lot of sense in an uncontrolled environment but for some uses this isn't optimal as the expected number of received packets is 1/3 of transmissions.
This is not my understanding, and I re-checked with some websearching before replying. By default, a BLE advertisement is transmitted on all t...
@dhalbert That's interesting, I wasn't aware of that. I need to double check the numbers in https://forums.adafruit.com/viewtopic.php?f=60&t=166440 as I thought they gave the appearance of transmission on one channel but perhaps not. It also changes the interpretation of the 5 second steps in https://forums.adafruit.com/viewtopic.php?f=53&t=165613 to be the receiver changing channel every 5 seconds.
For my current application I am just exchanging tiny amounts of data between N devices wher...
No, there's been no action taken on this issue. This problem relates to following "latest" links back to old versions, and requires adding redirects to 5.x and older versions so that the "new" URLs work. The general mold of what is on main can be followed, but the "from" and "to" need to be swapped.
@tannewt still need to figure out how to fix it for i.MX, I can spend some time on that this week if you like.
I was going to test this after my new timer tech is in, since I just changed the internals of Protomatter anyway.
Kind of forgot about it, sorry. I will test this today, it may have gotten solved by some other PR or bugfix to flash, etc. If not we can discuss when I should investigate it.
I stubbed out a couple of the unknown boards, so it at least shows something more meaningful. I couldn't find much info on LoC BeR M4 base board.
@tannewt Yep, recreated. I went back to just the basic setup per the guide:
https://learn.adafruit.com/adafruit-max98357-i2s-class-d-mono-amp/circuitpython-wiring-test
and still see the issue. So may be something more fundamental and not related to MSA301.

Tested as follows. Libraries from 20200714 bundle release.
Adafruit CircuitPython 5.3.1 on 2020-0...I think so? Looks like it became a PR?
When pasting blocks of code to the REPL there are lost characters very often. I don't see this on samd51, but I see it all the time on nrf52.
How to reproduce:
- I use
tioas my terminal program - Copy this arbitrary line of code:
123456789123456789123456789123456789123456789123456789123456789123456789%11 - Repeatedly paste it into the REPL, hitting enter at the end if necessary
Expected behavior: The line of code calculates the number 1
Actual behavior: It frequently resu...
The peak numbers in https://forums.adafruit.com/download/file.php?id=75784 do support an all channel advertising from the (pair of) nRF52840. In 30 seconds at 20ms adding 0-10ms jitter each would generate 1/((0.020+0.020+0.010)/2) * 30 = 1200 packets and the rx from the high rx trials are just below that.
I'll close this, thanks for the correction.
No, it can wait. Please get to ESP. I'll change the issue title.
Unless you plan on doing this soon for 6.x please put this under Long Term. I want to be stricter about putting things in milestones. To mark it as a bug, use the label instead. Thanks!
Hi! Two questions:
- What Braille Display are you using? I'd love to see how to set it up and possibly get one to test with.
- What is your current CircuitPython code? It'd be helpful to see the highest level of code.
Thanks!
So, should we close this or leave it open with a new way to reproduce?
Thanks @caternuson! @jepler any ideas what could cause this?
"When you first found this, were you trying to compute something, or was it just to see how well the longints work?"
I was trying to test a tool which is very similar to Ampy, by trying out various types of "user" code to stress the part of the tool which breaks back into the REPL. I wanted to see what timeouts etcetera made sense.
Ok, cool! I wonder if we don't need .data in RAM then since "flash" is actually RAM. Is it possible to restart the CPU without this happening? In that case we would want a clean copy of .data in the "flash" region of RAM.
You could also reserve a part of the DDR for it. We've had a similar problem with the ESP32-S2 which only has a power enable line and not a reset line and therefore blanks all ram on external "reset".
I think I can set-up a ci system, which builds the SoC and packages up the bitstream and generated headers, then you can include a tagged release?
I know Mithro has been talking about a "device-tree" like system. Which would ideally enable the SoC and CP/uP to be completely decoupled, but that's a reasonable amount of work to implement. Especially if it's only used by 1 platform.
Yup! We can download artifacts in our CI.
I like the device tree idea too. However, I think the pla...
I'm curious what version of CircuitPython is this and do you have a screen attached to the device showing the console output on TFT LCD? I have a five second play with this on Win8 with two CLUEs running 5.3.0 and can't reproduce but that's a very short test.
I upped the character count with some text from t'Internet and got a different bug. The console has frozen on me on a CLUE running 5.3.0. Here's one good then one that just stopped outputting
>>> len("What of the future? It is a matter of some concern to Real Programmers that the latest generation of computer programmers are not being brought up with the same outlook on life as their elders. Many of them have never seen a computer with a front panel. Hardly anyone graduating from scho...@tannewt No, not at all. Other things ended up taking priority.
@dherrada What is the status of this PR? Are you waiting on someone?
If it is me, let me know! ulab was brought up earlier, but I don't know, whether the stubs are a blocking issue.
this is a surprising hardfault.. ```#0 HardFault_Handler () at supervisor/port.c:327
#1 <signal handler called>
#2 0x000299c6 in sd_softdevice_is_enabled (
p_softdevice_enabled=0x200155a5 <sd_is_enabled.lto_priv> "")
at bluetooth/s140_nrf52_6.1.0/s140_nrf52_6.1.0_API/include/nrf_sdm.h:346
#3 0x0002aebe in common_hal_mcu_disable_interrupts ()
at common-hal/microcontroller/init.c:55
#4 0x00031b44 in background_callback_add_core (
cb=cb@entry=0x20014abc <callback.lto_priv>)
at ../../supervisor/shared/background_callback.c:38
#5 0x0003a532 in background_callback_add (data=0x0, fun=<optimized out>,
cb=0x20014abc <callback.lto_priv>)
at ../../supervisor/shared/background_callback.c:59
#6 usb_irq_handler () at ../../supervisor/shared/usb/usb.c:93
#7 USBD_IRQHandler () at supervisor/usb.c:93
#8 <signal handler called>
#9 memset (n=8, c=0, s=0x2003fa0c) at ../../lib/libc/string0.c:93
#10 memset (s=0x2003fa0c, c=<optimized out>, n=8)
at /opt/gcc-arm-none-eabi-9-2019-q4-major/arm-none-eabi/include/string.h:33
0x000299c4 <+0>: svc 18
=> 0x000299c6 <+2>: bx lr
End of assembler dump.
``` stack looks fine, the address the result is to be written to is fine (it's a stack address). is `sd_softdevice_is_enabled` OK to call from interrupt context? _goes off to read docs_no restriction on when it's allowed to call it is specified
@tulip sleet do you have any hints before I get too far in the weeds?
did you erase flash or anything like that? If you just import _bleio does it crash. I'm wondering if the softdevice region of flash got erased
I have been bootloading it and jlinking it all day. Let me check whether 5.3.0 has this problem and that would confirm that theory
it's a particle xenon fwiw
no, 5.3.0 is fine, it advertises and appears in bluefruit connect app
I assume it has to be my changes
it's perhaps unusual to enable/disable interrupts from an interrupt .. ?
so with the new one if you import _bleio it crashes? The process of importing will call sd_is_enabled. you could also try 5.4.something or the 6.0.0 alpha
I don't know for sure how much/little of my small script is needed to trigger. I can investigate further.
It was the smallest script I could run that got me to appearing in the bluefruit connect app ...
yes that is enough
though having done that the traceback is actually pretty different
327 reset_into_safe_mode(HARD_CRASH);
(gdb) where
#0 HardFault_Handler () at supervisor/port.c:327
#1 <signal handler called>
#2 0x00029a36 in sd_softdevice_is_enabled (
p_softdevice_enabled=0x20015592 <sd_is_enabled.lto_priv> "\001")
at bluetooth/s140_nrf52_6.1.0/s140_nrf52_6.1.0_API/include/nrf_sdm.h:346
#3 0x0002af06 in common_hal_mcu_disable_interrupts ()
at common-hal/microcontroller/__init__.c:55
#4 0x00031978 in background_callback_add_core (
cb=cb@entry=0x20014abc <callback.lto_priv>)
at ../../supervisor/shared/background_callback.c:38
#5 0x0003a56e in background_callback_add (data=0x0, fun=<optimized out>,
cb=0x20014abc <callback.lto_priv>)
at ../../supervisor/shared/background_callback.c:59
#6 USBD_IRQHandler () at supervisor/usb.c:99
#7 <signal handler called>
#8 0x00036da6 in tu_fifo_count (f=0x20012750 <_cdcd_itf+16>)
at ../../lib/tinyusb/src/class/cdc/cdc_device.c:119
#9 tud_cdc_n_available (itf=0 '\000')
at ../../lib/tinyusb/src/class/cdc/cdc_device.c:121
#10 tud_cdc_available () at ../../lib/tinyusb/src/class/cdc/cdc_device.h:178
#11 serial_bytes_available () at ../../supervisor/shared/serial.c:94
#12 mp_hal_stdin_rx_chr () at ../../supervisor/shared/micropython.c:40
#13 0x000709e8 in ?? ()
Backtrace stopped: previous frame identical to this frame (corrupt stack?)
``` same thing, arbitrary code -> USBD_IRQHandler -> ... -> sd_softdevice_is_enabledthe stack looks damaged. It should be clean all the way down
I agree it's suspicious, but I'm not building with DEBUG= so I've shrugged it off. I feel like gdb does that to me a lot
could you push your code to your repo?
branch background-callback of jepler/circuitpython
I assume the problem is introduced at 4024e384d0a7 "nRF: Convert USB to run via callback"
could a background callback you call add itself back on to the linked list or otherwise cause the linked list to grow?
It's supposed to be safe to "add" a callback that is already added
+ CALLBACK_CRITICAL_BEGIN;
+ if (cb->prev || callback_head == cb) {
+ CALLBACK_CRITICAL_END;
+ return;
``` This test is supposed to stop without modifying the linked list if `cb` is on the list. It could be on the list at the HEAD (if callback_head == cb) or anywhere but the head (if cb->prev is not NULL)CALLBACK_CRITICAL_BEGIN is calling common_hal_mcu_disable_interrupts, so we aren't even getting to that test
just before 4024e384d0a7 usb is broken on nRF because I've stopped background tasks running all the time already, so it's not super-legit to test at that ref. You can sort of do it by calling supervisor_enable_tick() at the debugger prompt. When you do that, import _bleio works just fine.
Narrowing it down further ... With this change ALONE relative to origin/main@37e77b21c ("Merge pull request #3140 from dunkmann00/docs-version-conf") you get hardfaults at import _bleio: ```$ git diff
diff --git a/ports/nrf/supervisor/usb.c b/ports/nrf/supervisor/usb.c
index 3d2527faa..d8877fd08 100644
--- a/ports/nrf/supervisor/usb.c
+++ b/ports/nrf/supervisor/usb.c
@@ -88,6 +88,9 @@ void init_usb_hardware(void) {
}
}
+uint8_t some_global;
+
void USBD_IRQHandler(void) {
tud_int_handler(0);
- sd_softdevice_is_enabled(&some_global);
}
the softdevice will hard-fault if it misses a timing window, which can easily happne if you have turned off interrupts, instead of using the softdevice critical section turn-off/turn-on routines (which do their own fancy work of scheduling)
though I don't understand why it should fail on the test.
is it possible that you turned off interrupts when the sd was disabled and then turned them on when it was enabled? Then the pair wouldn't match and there would be all kinds of havoc
that's hardfault and not reset_into_safe_mode(NORDIC_SOFT_DEVICE_ASSERT); ?
it doesn't call the assert routine unless you compile debug
in the "this change ALONE", I'm confident I didn't newly enable or disable interrupts
it just hardfaults
i would double-check for accidental recursive interrupt-off, though I read the code and I don't see that
I have for sure written those during this PR, it did give me a day of head scratching last time
also, the change above shares a global for sd_softdevice_is_enabled(), so maybe two interrupts are checking and one is getting incorrect results
I'm not sure I understand what you're saying by that. This is the only "use" of some_global. I assumed sd_softdevice_is_enabled was storing 1 or 0 in it. I'm not sure what would be "sharing" anything. but if I misunderstand totally what sd_softdevice_is_enabled is doing...
i'm not sure why the interrupt handlers share the some_global.
I just called the variable some_global when I declared it for purposes of demonstration, its name is purely arbitrary
right, that's not what I mean, but why is the IRQ handler checking that? What does it do with the result?
yes, I'm happy to explain what I'm getting at with my snippet above
I have a bunch of code in my branch, and when asking for help it's better to provide a simpler case for what's going wrong. That is what I'm trying to do.
What's "new" in my branch is: Now, USBD_IRQHandler [indirectly] calls sd_softdevice_is_enabled, plus a lot of other stuff
the sd_is_enabled static is shared across two routines, and if common_hal_mcu_disable_interrupts() is called twice in a row, or the state changes between the two calls, then things will get messed up
question: is the problem "a lot of other stuff" or "IRQ handler calls SD"
I think the problem might be that the "is SD enabled" bool value becomes stale and wrong
Division does not seem to have the same issue. I generated some very large
numbers (i.e. 2**(65536*2) ) and tried various
division in REPL. All returned immediately (or close enough so I couldn't
see any lag). It seems only the large exponents
are causing an issue.
I agree that running more code really shouldn't take less time. But,
I've instrumented the mpn_mul() and looked at the timing
with a login analyzer. The average time in the standard code is 4.12
seconds, and in the code callin...
i'm just wondering if that's possible
the minimal code I add to get the flavor of hardfault is NOT an additional use (read or write) of the circuitpython global sd_is_enabled, it's an additional call to the SD-provided function sd_softdevice_is_enabled which is expected to assign the distinct global variable some_global
i'm just wondering if sd_softdevice_is_enabled is detecting that something has gone wrong
i looked in Nordic DevZone and some people have hard-faulted calling it, though it seems to be for unrelated reasons
what happens if you compiled DEBUG=1?
same thing.
always on importing _bleio
so as soon as softdevice actually does become enabled
it's really fishy the stack is smashed, not sure we are really seeing the correct backtrace
maybe the assumption you can call softdevice_is_enabled in an IRQ handler is wrong. Was that already the code?
that is "new, for all I know"
i mean, you added the SD call in the IRQ handler, is that right?
what is the reason for checking the sd status there?
thinking about this, they wouldn't want you to do that, because an SD routine can do arbitrary stuff, including messing around with interrupts itself
A reasonable question 🙂 this new linked list has to be manipulated in atomic fashion. The way I have learned to do those things is by having a critical section which is not interruptible, and I assumed it was OK to build that out of common_hal_mcu_{en,dis}able_interrupts
there are a limited number of backround routines, right?
No, MP3Decoders have them and the number of them is not static and fixed.
suppose there was just a volatile boolean for each one, which you checked and called if true. Then you don't need to add or remove them. ... ok, suppose there was a boolean for each category of background routines. Some of the background routines are fixed, and they can be checked with a simple booelan. For MP3, there could be a single background routine that can maintain its own worklist. would that work?
It's not the design I've been working on for weeks, and it still means you have to check a BUNCH of booleans instead of JUST ONE pointer. Getting to a single check is something I also view as important.
If we have to say "well, softdevice is what it is", something will have to give.
there could be a master boolean that says if any of the other booleans are set
i think it's true that it's basically complaining about calling SD routines in an interrupt handler, but I'm trying to find doc about that
the USB interrupts are prio 0, is that right, which is higher than the SVC call:
It's fine to call them from the interrupt as long as the interrupt runs at lower priority (ie a higher number) than the SVC call. So you can call the sd* functions directly if you are running at priority 6 or 7 (the two APP LOW priorities) but not from 2 or 3 (the APP HIGH ones) as they are higher than the SVC call.
what is the priority of USB?
is it a static thing "USB is always high priority" or do we have a choice so that we can lower it to "so that softdevice works"?
we changed the prio a long time ago during atmel-only days because we were losing interrupts, I think. I have to find that.
there's a _NRFX_IRQ_PRIORITY_SET but it's not called by us
ports/nrf/nrfx_config.h:#define NRFX_POWER_DEFAULT_CONFIG_IRQ_PRIORITY 7
ah there are these
Does anyone know if makecode arcade is supported on the nRF52840 express? I see a mention of it here that it will be added in the future, but not sure when the guide was updated, so perhaps it has support now? https://arcade.makecode.com/hardware/adding
Microsoft MakeCode
If you want to produce an Arcade-compatible product please let us know at arcadehdw@microsoft.com.
nrfx/templates/nRF52840/nrfx_config.h:#define NRFX_USBD_DEFAULT_CONFIG_IRQ_PRIORITY 7
supervisor/usb.c
46: NVIC_SetPriority(USBD_IRQn, 2);
@barren peak looks like it has been discussed here https://forum.makecode.com/t/makecode-for-nrf52840/1164/6

Microsoft MakeCode
I submitted an issue on Github, #109 Re-cloning the repo fixed the problem.
Update on testing nRF52840 boards:
1.) Feather nRF52840 Express - blinky works.
@tulip sleet thank you !
- NVIC_SetPriority(USBD_IRQn, 2);
+ // 6 is max priority that still allows calling SD functions such as
+ // sd_nvic_critical_region_enter
+ NVIC_SetPriority(USBD_IRQn, 6);
@onyx hinge thanks for the reply.I saw that thread but the conversation did not close.
experimental does not have nrf52840 yet as far as I can see
@onyx hinge The reason we bumped the prio was https://github.com/adafruit/circuitpython/pull/901
We've exceeded what I know about makecode, sorry I can't be more helpful
i think it is a work in progress. The makecode folks might answer in #help-with-makecode eventually, or perhaps you can catch them when they are online
@onyx hinge I think it might make sense not to check for sd enabled all the time in the critical section routines, but instead to set a global that remembers the whether the sd is enabled. it only gets enabled/disabled one or two places. I'm not even sure it ever gets disabled programmatically once it's enabled.
@tulip sleet when sd is enabled, it has to make sd calls to enter/exit critical sections so that won't help will it?
if (sd_is_enabled) {
sd_nvic_critical_region_enter(&is_nested_critical_region);
right, hmm, well, you could use a different locking mechanism for your linked list, instead of critical regions
maybe there are some test-and-set primitives you can use?
Hello. I've just noticed that CircuitPython 5.3.0 doesn't reload code if code.py/etc is copied to the board (CLUE) if the running code is in an input() statement. It looks like it's deferred until after the input() completes, i.e. user (eventually) enters something. Is that regarded as a bug?
@simple pulsar i agree that's unexpected; thanks for an issue!
I agree that is the current behavior, I run into it all the time.
@onyx hinge @tulip sleet thanks
I rarely use input(). I've gone retro for tty stuff. I'll file it.
with the IRQ priority thing reverted, it looks like sd_nvic_critical_region_enter/exit are safe to call
you mean just on nrf?
sorry I said something confusing again 🙂
without changing the USB IRQ priority (so it stays at 2), it looks like sd_nvic_critical_region_enter/exit are safe to call
they don't actually "call the SD"
The normal mechanism where the program reloads on CircuitPython if a new file is copied across to CIRCUITPY appears not to work if the current program is running and is in an input statement, i.e. pending user input. When the user presses return the reload does occur so it's blocked rather than lost.
Observed on CircuitPython on 5.3.0.
@onyx hinge sorry, we got a food delivery. What did you change so that it works again?
I have 2.5 approaches. I don't know which one to take.
- Change the IRQ priority of USB, and anything that needs to schedule tasks, so that it is 6 instead of 2.
- Track "sd is enabled" via a global and check that instead of calling
sd_softdevice_is_enabled
2.5. Ignore whether we are using sd, and always usesd_nvic_critical_region_{enter,exit}
I implemented 1 and 2.5, at least in terms of adding calls to USBD_IRQHandler to the required functions
I see that's what it says there 🙂 but I also looked at the implementation, 😜
OK, won't go with 2.5 then
i remember now trying to decide what to use. I also looked at the impl a year or two ago, and was confused.
I squinted at it and said "I bet that's leaving interrupts (priorities?) 0 and 1 enabled, and masking the rest"
yah, it's just a q of whether they might change it in the future..., i guess
does soft reset disable softdevice?
another q is if USB prio is made weaker again, will it get starved out as described in that PR I mentioned above. But we'd have to look at PulseIn for nrf
I think PulseIn was not the only case of stuff starving USB. audio might do it too
I think just checking a global is pretty easy
what priority does PulseIn use on nRF?
nrfx_config.h:#define NRFX_TIMER_DEFAULT_CONFIG_IRQ_PRIORITY 7
so that's safe
with only 8 levels I guess you run out pretty fast
sd_softdevice_enable and _disable are each called only one place, in common-hal/_bleio/Adapter.c. A global would be fine.
i guess there could be a race condition at the global setting/cleraing, though
does soft reset go through Adapter.c to disable softdevice?
bleah, no mutex mechanism in M4 architecture...
so the only issue would be if you were using levels 0 and 1 when SD was not enabled, then it wouldn't really be a critical section for interrupts at those levels
but circuitpython would have no cause to use them
right
so changing to those seems fine to me, with maybe a cautionary comment in the micrcontroller source file that calls them
are you happier with that than with changing the USB IRQ priority?
i'm thinking that there's a race condition anyway already because the checking of is_enabled() is not atomic with the branch that chooses which enter/exit to use
I think there's another bug too, the counting isn't done when softdevice is enabled
but in this kind of code it's very easy to talk yourself into a wrong interpretation of what's going on
(I mean, for me to talk myself into it)
Here you go:
TinkeringTech Scoutmakes Azul VID 0x239A PID 0x00BD # bootloader
PID 0x80BD # arduino
PID 0x80BE # circuitpython
@tulip sleet I don't understand why on samd common_hal_mcu_disable_interrupts always calls __disable_irq(). I guess __disable_irq() is a no-effect instruction if IRQ was already disabled...?
@onyx hinge yes, i think so, why bother checking
dinnertime, I will have to conclude this at a later date
thank you for your time and help
us too, pad thai in process, yw, and thanks for your patience on the dead ends
yum
Zzzzzzzz
how do i make it so When a customer inputs an ODD number, you should light up a single red LED. When the customer inputs an EVEN number, the green LED will light up.
I'm new to this whole arduino thing and my code is making my led keep blinking even without input
@lyric cipher you need to be running a Firmata client on the board so it can communicate with the host. But do you want to use Firmata? What board is it?
a regular Arduino?
Have you tried a tutorial like this? <> You need to compile and upload Firmata onto the board

Control your Arduino from your computer with the Arduino Standard Firmata library. Learn how to install it and use it with Python and pyfirmata.
this #circuitpython-dev channel is mainly for CircuitPython development. #help-with-arduino might have more people familiar with Firmata, and #help-with-circuitpython will have people familiar with Python, but not necessarily Python Firmata
ahhhh ok thank you
here's another link: https://realpython.com/arduino-python/#hello-world-with-arduino-and-python
In this step-by-step tutorial, you'll discover how to use Arduino with Python to develop your own electronic projects. You'll learn how to set up circuits and write applications with the Firmata protocol. You'll control Arduino inputs and outputs and integrate the board with h...
I found that in the Python server in its #microcontrollers channel, after searching for "firmata"
@lyric cipher ^^
I found that in the Python server in its #microcontrollers channel, after searching for "firmata"
@tulip sleet Ooooo thank youuu
Is this is the right place to ask about circuitpython libraries?

Adafruit Learning System
Learn to use CircuitPython if you've previously used Arduino
Just wondering whether the board module is a dependency for busio
@gilded cradle I've been coding a lot on the Jetson Nano platform and the board module is tripping up some of my code
ok got the cue! Thanks ! I'll put it into #help-with-circuitpython
good morning .. still trying to get common_hal_mcu_disable_interrupts and _enable_interrupts working in the new way I need them to on nrf
@v923z Ar far as ulab goes, I don't believe I'm blocked on that.
@tannewt Yeah, pretty much what @dhalbert said
@tulip sleet OK here's what I ended up with, I'd really appreciate your eyes on it before I proceed. https://github.com/adafruit/circuitpython/commit/aa87b2fea89b303b28095d23d171be200d44dc70 -- with the rest of the background task list stuff on top of it, everything seems to work, _bleio imported or not

GitHub
The motivation for doing this is so that we can allow
common_hal_mcu_disable_interrupts in IRQ context, something that works
on other ports, but not on nRF with SD enabled. This is because
when SD...
@onyx hinge This looks very good, and I appreciate! Could you just add a comment at line 53 that warns that only levels 2-7 are disabled, and that levels 0 and 1 are reserved for use by the SoftDevice, and shouldn't be use by CircuitPython code? (I think that's right.)
adding the comment in common_hal_mcu_disable_interrupts ?
yah
sure thing
+ //
+ // This only disables interrupts of priority 2 through 7; levels 0, 1,
+ // 5, and 6 are reserved for softdevice and should never be used, so
+ // this limitation is not important.
sd_nvic_critical_region_enter(&is_nested_critical_region);
i didn't know about 5 and 6, so our code should only use 2,3,4?
oops I got the numbers wrong
let me double check
the 2 highest and 2 in the middle are taken by sd
but it's 4 and 5, not 5 and 6
eek I apparently have been getting SOME of my information from nrf51 series softdevice docs
OK, it's 0, 1, and 4 that are reserved. Not sure where I got that there were two middle priorities reserved.
+ // and 4, are exclusive to softdevice and should never be used, so
+ // this limitation is not important.
@slender iron there aren't any guides or notes or docs or anything about getting started with the esp32-s2 on circuitpython, right? I'm having trouble getting CMake to find the xtensa-esp32s2-elf-gcc compiler.
I think it's probably because I ran install.sh in my user folder? Not in the actual circuitpython directory? Do you have any notes on what I need to set my environmental variables to if I want it to build in Circuitpython?
In the esp-idf folder run . ./export.sh
No changes. Still get
-- Found Git: /usr/local/bin/git (found version "2.24.1")
-- The C compiler identification is unknown
-- The CXX compiler identification is unknown
-- The ASM compiler identification is unknown
-- Found assembler: xtensa-esp32s2-elf-gcc
CMake Error at esp-idf/tools/cmake/project.cmake:307 (__project):
The CMAKE_C_COMPILER:
xtensa-esp32s2-elf-gcc
is not a full path and was not found in the PATH.
did all that.
May need to rerun install.sh in the esp-idf folder
Wondering if I did it in the wrong place, though. Are specific environmental variables required?
Yes. I think so.
Like does IDF_TOOLS_PATH need to change
could you tell me where it needs to go?
It doesn't specify any suggestions in the startup guide or the port
I just followed that guide and it all works. I have to run the export.sh every time I open a new shell.
What OS are you on.
Hmm. So you followed the guide, didn't need to change any environmental variables (so presumably you have your tools in ~/.espressif), ran install.sh and export.sh from inside esp32-s2/esp-idf, and then ran make BOARD=<board> and it all worked?
I'm on mac OSX
Ah . On Mac I also had to switch to bash shell.
Yeah I'm on bash.
Do you manually activate the virtualenv? I see that it creates one but I don't see instructions about actually turning it on so I assume the build process does that automatically if it needs it
Ok I re-ran install.sh within circuitpython and it seems to be working now. I guess it can't re-use the build tools across installations? Seems like it even re-downloaded everything.
Invoking a "parallel build" in ports/esp32s2 fails with a variety of errors, probably because some elements of the build process are not designed to be run in parallel. This is unfortunate, because parallel building can greatly decrease build times especially on high performance desktop computers.
For instance, the first overt failure shown:
$ make BOARD=espressif_saola_1_wroom clean; make -j19 -O BOARD=espressif_saola_1_wroom
...
[29/30] Linking CXX static library esp-idf/driver/...Yeah. I won’t pretend to understand all that it does. Just happy it works!
Well it isn't compiling lol so I'm not done yet
pyparsing.ParseException: Parsing sections info for library /Users/hierophect/Firmware_Projects/circuitpython/ports/esp32s2/build-espressif_saola_1_wrover/esp-idf/esp-idf/xtensa/libxtensa.a failed. (at char 0), (line:1, col:1) ninja: build stopped: subcommand failed.
This is because we call out to ninja for dependencies. If we switch CP to ninja we can do it natively instead. The IDF deps also don't rebuild because we don't have their deps in our make files.
In the meantime, adding to the bottom of the Makefile, this prevents build problems by disabling parallel jobs inside make even if requested:
.NOTPARALLEL:
I can prepare a PR if that's the best fix in the short term.
Ok, no problem! Just wanted to make sure the status here was up-to-date. Thanks!
running on mine... just to be sure
this build process is also SUPER verbose, is there any way to trim it down?
@solar whale weird I tried just running make clean and built it again, and it worked?
here is what I get -- worked ok https://pastebin.com/LittFDaF

It was clean the first time too so I don't know what's up with that
^looks about the same as what I have now. thanks for your help!
yeah new toolchains are always hairy.
When I place the MeowBit in boot mode to load a*.uf2 file and then load 6.0.0-alpha.1, it seemingly does load on the MeowBit, but then it just returns to the loading screen, not circuitpython. When I load a *.uf2 file from Makecode, it does load and runs the code.
Here is the "Hello, World!" Makecode file I am using that does work.
@solar whale what are you using as your flash command? make BOARD=... flash?
on the Mac -- that works for me
Is there any known issue with github at the moment?
on other OS I have to specify PORT=/dev/ttyUSB0 but the default on the Mac is good for me.
@lone axle I can access it.
There is a PR whose fork/branch had more commits pushed to it. And those commits show up if I look at the fork/branch in question directly. But they never showed up in the PR.
@lone axle I pushed the re-request review to see if that triggered the second commit to get into the pr. But yeah, I'll try again in the afternoon.
Thanks for the review.
I can test it out on my PyPortal later today as well.
This speeds up my build by about a factor of 3, when using an appropriate "-j" flag:
| parallelism flag | before | after |
|---|---|---|
| -j1 | 39.6s | 37.7s |
| -j19 | error | 11.6s |
A "make" which does not need to do anything now takes about 800ms; I did not compare to "before".
(test system is AMD Ryzen 7 3700X with 16 threads)
Closes: #3154
This PR: https://github.com/adafruit/Adafruit_CircuitPython_PyPortal/pull/82 is not pulling in this commit: https://github.com/fede2cr/Adafruit_CircuitPython_PyPortal/commit/f08b1019c31d0ccbce224b8838fa4fc074e9d055 Typically in my experience there is nothing "special" that needs to be done beyond pushing a new commit to have it show up in the PR. I've never seen it get in a state like this where the direct repo page shows the commits, but the PR page does not.
just getting to my first flash on Linux but yeah I need to specify BOARD= PORT= flash
Wrote 480256 bytes at 0x00000000 in 14.2 seconds (270.5 kbit/s)...
Hash of data verified.
does it put the repl on the debug usb port, or do I have to hook up real usb now?
@solar whale I needed to do it on my mac
default was something like /dev/tty.SLAB_USBtoUART and mine was just a string of numbers
ah -- well that makes sense
Ok, I guess I have something running? I get bootloader text on the USB to UART controller... but, uhh, now what?
Do we not have CDC USB running for the ESP32-S2 yet?
don't see a drive either
mine comes up as /dev/tty.SLAB_USBtoUART
The CircuitPython USB that provides filesyste etc, is not the connector on the board, you have to wire up your own usb connector
mine is tty.usbserial-1411120
I'm just trying to find the info
Looks like there are a few other people reporting similar issues with github PRs not showing new commits today: https://twitter.com/search?q=Github PR commit&src=typed_query&f=live
On 14 Feb 2019 @github tweeted: "Don't want to commit?
Open a draft PR. .." - read what others are saying and join the conversation.
There's a very nice guide for starting with the esp32-s2 here.
https://gist.github.com/askpatrickw/0a276c7e2d4f54e442b2cb6eaa0d32ea
Gist
GitHub Gist: instantly share code, notes, and snippets.
Oh that's right I need the other connector
I see tty.usbserial-1411120 as well...
OK yes, white to "19" and green to "20" and now I see CIRCUITPY
Adafruit CircuitPython 6.0.0-alpha.1-84-g910f69c42 on 2020-07-15; Saola 1 w/Wroom with ESP32S2
thanks @silver tapir that link was exactly the info I needed
From what I remember you need to reset the meowbit for it to enter circuitpython. It cycles between the two modes.
BTW, a friend from centralamerica was able to load circuitpyton on a new board. The board is not his design.
https://twitter.com/N10_SoJu3/status/1283422121251799046

Nuestro "Hello Word" en circuitpython utilizando unos neopixels y un acelerómetro ADXL335 para cambiar el sentido del pixel conforme la dirección de inclinación del acelerómetro.
Gracias por tu ayuda @fede2_cr https://t.co/Sq5YIZp6FP
@silver tapir What board? We can add it to the newsletter 🙂
huh. this device comes up with different SNs. Usually it comes up as SerialNumber: 0000000000000000060000000EFCDF but at least twice it came up as 00000000000000000135DFF30EFCDF
@idle owl It's kinda like an m0 fona.
http://es.makerfabs.cc/product/maduino-zero-sim800c.html

Quick PCB Assembly, IOT Solution, Open Hardware - Makerfabs
Maduino Zero SIM800C es una solución IOT (Internet of things) basada en el SAMD32 MCU de 21-bit Atmel y el módulo GPS GPRS / GSM SIM800C. ...
@onyx hinge It's a more precise version. 😉
oh yes it must be floating point
anyway, goal achieved, I ran esp32s2 and it works after my background and usb changes. hooray.
and it's already 11AM
@silver tapir Thanks! I emailed Anne with the Twitter link and the board link.
@onyx hinge 🎉
fwiw I am NOT seeing the device come back after storage.erase_filesystem() ... hmm, I thought it was supposed to do an orderly reboot in fairly short order
Hmm I thought you were suppose to reset after that.
on other boards it does reboot -- not on esp32s2
but it will drop the USB connection on other boards -- still esp32s2 is different....
OK thanks @solar whale nice to have it verified that it's not just me or my changes to the USB code
does anyone else work in a way that they would notice if the serial number was changing?
never looked -- remind me how to read it?
different ways on different systems.
on linux this tells me all the different serial numbers used by espressif devices that I've plugged in today: grep -A1 "Manufacturer: Espressif" /var/log/kern.log | grep SerialNumber | awk '{print $10}'
I've got 5 different serial numbers logged, including just "0" 😕
Sounds like a timing/synchronization problem
this is a problem for my workflow, I like to automatically reopen the repl by using tio /dev/serial/by-id/[something long that has the serial number]