#linear-algebra
2 messages · Page 320 of 1
I guess by setting it equal to zero that's what I tried and it said the answer was right. I had to get it out of matrix form to do that. That sounds counter intuitive though I don't know why you would set it equal to zero for non zero solutions.

ok so the thing here is
doing it your way
you did algebra all the way up to z(k-4) = 0
and then you realize
if k is anything but 4, then you can divide both sides by (k-4) and end up having only z=0 as a solution to this equation
but if k is 4, then the equation becomes 0=0 and is satisfied by all real values of z
Oh that make sense.
How would you solve this problem?
Is there a better way?
Is there a way by making it rref
well you could rref the matrix and then require its last row to be zero
I don't even know how to make that rref lol I find it easier to just convert it back into its system of equations
it's the same steps as for any matrix. just now with one variable
for example in the first step you would subtract k times the first row from the third row
What do you mean for any matrix? Don't you take different routes for rref-ing matrices or is there a universal way for it?
I will have to check it out later got other classes to do
Could somebody elaborate a little bit on what this means? I've only done a first basic linear algebra course and none of the spaces i'm familiar with dealt with "matrices" as their spaces, rather all the spaces I'm used to were "built up" by vectors.

a real vector space is a set of things that can be added and multiplied by real numbers
in "abstract" linear algebra, a vector is defined as an element of a real vector space
So as long as we can multiply something, and add too it, with real numbers, it can build a space?
read the definition of a vector space
Okay
the operations of vector addition/scaling must satisfy some rules, laid out in the definition
As long as ,something a matrix in this case, satisfies the rules of a field it can be (or is?) a vector space
Ok this is just the definition then, anything on which you can apply these fundamental rules, is a vector space?
bad wording, a field contains what we call scalars, the set of reals R is an example of a field
M_nm, together with sensible vector addition/scaling rules (entrywise), is a vector space
Is there some way to intuitively understand what it means for matrices to be a vector space? With three independent vectors I can easily "see" how that would construct some sort of space, but a matrix or multiple, don't feel so easy to visualize. Or is this rather something I'm just to accept as it obviously meets the definition of what a vector space is?
list out all of the entries in one column instead of a grid
That's true. Did not think about that.
That clears it up a bit. I did not consider that M_nm includes the "intuitive case", so it is not so different from what I'm used to after all. Thank you for the help
hey could someone help me with some linear algebra homework?
if you have a question just ask
"Non-zero" solution refers to the vector x, which has to be non-zero and yet be a solution to Ax=0. It's obvious that a system Ax=0 always has trivial solution A = 0 (A is the zero matrix) and x = 0 (x is the zero vector)
Here's criteria for when such non-zero x exist for matrix A:
If it's a square matrix, then it has to be non-singular for Ax=0 to have only trivial solution (i. e. if A is singular, then there exist non-trivial solutions)
If A has more rows, than columns, then having linearly independent columns (full column rank) ensures that Ax=0 has only trivial solution, and vice versa for when there's more columns than rows
Look up the definition of a kernel of linear operator, it's a set of all x for which Ax=0 is satisfied. Essentially in this problem you're asked to find such values of k, so that matrix turns singular and has non-trivial (aka non-zero x) solutions to Ax=0
Hey, can I get a confirmation for parts (i) and (j)? For (j), I believe that the first 3 entries determine the entire sequence, so I think {(1, 0, 0, 2, 0, 0, ...), (0, 1, 0, 0, 2, 0, ...), (0, 0, 1, 0, 0, 2, ...)} is a basis for W and so dim(W) = 3. For (i), I think every polynomial in W can be written as a_1(x - z) + a_2(x - z)^2 + ... + a_n(x - z)^n, so {(x - z), (x - z)^2, ..., (x - z)^n} is a basis for W and dim(W) = n. Are these right?

what's the goal here?
to verify that these are subspaces, or to find their dimension?
Ah, sorry. The goal is to find a basis and the dimension for each of the subspaces W.
Ah thanks.
sorry maybe i should have sent my question here:
Hi everyone! I just need some help conceptually understanding something about vector matrix multiplication! In class, to figure out how much a matrix A acts in a certain vector direction n, we did nAn. Why is it like this and not just An? I get that one is a scalar resultant while the other a vector resultant, but I still cannot conceptually understand what we did here. I would really appreciate it if someone could explain! 🙂 --------For further context, we were trying to calculate strain in the direction n. So A was the strain tensor
When we are calculating nAn we are calculating the dot product of n and An. The dot product in a sense compares the direction of two vectors, if the dot product is 0 then the vectors are orthogonal and if the dot product is maximal (that is if you fix one of the vectors and consider the function x-> xu and check the maximum of that function for all x with the same length) then u and x go into the same direction. If it's minimal then x and u go into opposite directions. I assume this is why you use the dot product nAn and not just An. But I don't know the context of strain/strain tensor so maybe there is a different reason
Ahhh righttt I didn't think of it that wayyy
That makes a lot of sense
I was a bit confused because a matrix doesn't really represent a direction

I guess find the augmented matrix and row reduce
Set up the linear system (get expression for x1 and xn from first and last expression) then find an eigenvector x for which Ax=x that is eigenvalue 1 (just tested and it seems there are two eigenvalues that are 1) There is probably a nice analytical expression (probably some nice sine-expression since this is pretty much the Laplacian)
Matrix A satisfies the condition A^2 = A. What value should t be so that the matrix A - tE does not have an inverse matrix?
Can somebody give me a hint?
t=0?
can you tell me something about the minimal polynomial of A?
and the possible eigenvalues of A ?
the condition is equivalent to A^2-A=0
I guess if you wanna call it that
So, a+d = 1 and ad -bc = 0
oh we also know that A is 2x2 ?
then yeah you can solve it just by setting up equations for a,b,c,d
well ad-bc doesn't have to be 0
for example A=I the identity
you should apply the $A^{2} = A$ to $A-tI$
Transparent_Elemental

then you simply factor it and take an inverse explicitly
Factor $A^2 - tI$ ?
Kinuly

no, notice that if $A^{2} = A$, then if $A-tI = B$ you can left multiply the $A-tI = B$ by $A$
Transparent_Elemental

So, A^2 - At = AB
meaning, A - At = AB
meaning At = tI?
But what does B have to do with anything about the inverse?
$A-At = AB$ is correct, but factor it like this $A(1-t) = AB$
Transparent_Elemental

B is just notation trick to have an equation, we don't really care about what B is
now take explicitly inverse of both sides and show that the inverse on the left doesn't exist for some t (notice that on the left it's a matrix multiplied by a number)
Sorry, still confused.
I've solved everything else in the problem set, this one has been making me stumble close to an hour 😓
so we have that $A(1-t) = AB$, explicitly taking the inverse we have $[A(1-t)]^{-1} = (AB)^{-1} \rightarrow \frac{A^{-1}}{1-t} = (AB)^{-1}$, the inverse on the right can't be equal to the inverse on the left if t=1 because we divide by 0
Transparent_Elemental

Oh ok.
I get the logic behind it thanks 🙂
There is something about that way that is solved which leaves me with a wierd feeling in my stomach lol
Also what's E in your thing ?
Is it the identity or the matrix full of one's?
E is the japanese way of writing a symbol for the identity matrix
Ah k
this proof is definitely weird and incomplete. what happens if A doesn't have an inverse. and so far we have only shown that AB has or has not an inverse. that doesn't necessarily tell us something about B having an inverse
assume that lambda is an eigenvalue of A. then you can check that lambda^2-lambda is an eigenvalue of A^2-A (in general p(lambda) is an eigenvalue of p(A) for any polynomial p). but A^2-A=0 so lambda^2-lambda is an eigenvalue of the zero matrix, therefore lambda^2-lambda=0
so lambda=0 or lambda=1
those are the only two possible eigenvalues of A
which means they are the only possible values such that A-lambda I is not invertible
note that this doesn't tell us anything about whether A or A-I actually are not invertible
I have no idea what's going on, but from the conversation, what I can infer is that this problem is very hard, and I shouldn't beat myself up too much over it 🙂
Thank you for your help though
well I solved it in the general case
for 2x2 we could do it explicitly
again by doing some equations for a,b,c,d and checking some stuff
I see (?)
check out for example wikipedia https://en.wikipedia.org/wiki/Idempotent_matrix
Feeling especially stupid today and my 5 month old notes were written by some stupid guy with my name. The $r$ in $z = re^{i \theta}$ is just a scalar for the length of the positional vector of the complex number right?
Joachim

yes
Okay thanks
r is the length, e^(i theta) is the direction
That helps so much! thank you!
Finally settled the butterflies in my stomach lol
if A is invertible it's simple to show that B doesn't have an inverse for t = 1, though I agree that in order for it to be a complete proof you have to review all the cases
That matrix actually has an interesting eigenstructure. Thanks for posting 🙂

factor theorem
If P(a) = 0 then X-a divides P
Alright I see I see, but what does he mean by W is a polynomial in x_n?
Recall that a determinant is a (multivariable) polynomial in the entries of the matrix
If x_n was variable and x_k were constant for k <= n-1 then determinant with said coefficients is a polynomial in x_n
expand it out in the 2x2 and 3x3 cases if you need to convince yourself
(it only consists of multiplications and additions of the entries between one another)
If you fix all x_i's except x_n, you get a single-variable polynomial
e. g. (x-2)(x-3) is a polynomial in x
And this, try an example to convince yourself of it
I seee, so in this step he fixes all x_i's and treats them as constants? With only x_n being the variable?
yeah, but it depends on what follows after, sometimes it's just easier to think about complicated things like this as regular polynomials you're used to by imagining that all the roots are fixed
or there could be some proposition that relies on these roots to be fixed

But if that's the case, shouldn't W(x1,..., xn) just be the product of its factors? Where's this leading coefficient part coming from?
shouldn't W(x1,..., xn) just be the product of its factors
If you know a polynomial of degree 2 has roots 1 and -1, it could be equal to X²-1, but also 1-X², 2X²-2, etc
Polynomials that have exactly the same factors are equal up to a scalar multiple
Studying the leading coefficient is just one way to figure out that scalar multiple
Okay, last question hopefully, this page has given me more trouble than it's probably worth... How does expanding the determinant with respect to the last column show that a(x1,...,x_n-1) = W(x1,..., x_n-1)?


@normal pilot
Oh my God, I think I finally understand... Just to confirm I get it, it's always true that you can represent a polynomial of degree n-1 in x in the form a(x-x_0)...(x-x_n-1), where x_i are its n-1 roots, and a is its leading coefficient, is that right?
@leaden tide
Indeed (assuming you can fully factor the polynomial like in ℂ)



can someone help me with this question
because to me this problem makes no sense
especially d) because I dont understand how cars are going from west to east along Rue de Maisonneuve

,rotate

the end result is correct. didn't read it all
Thanks but smt doesn’t make sense to me
It’s that should the determinant of A inverse be 1 over the determinant of A?
But the final result gives a determinant of 1
So I am kind of confused
it's fine
you're computing the determinant of the inverse wrong
if c is a scalar and B is an n x n matrix, det(cB) = c^n det(B)
so when you're computing the determinant of A^{-1} and pull out the 1/(det A), you need to square it
Oh right I forgot about this property
Sorry that’s my bad
For some reason, I thought it was just gonna be det(kA) = kdet(A) bc i did something before this where I had det( of A but one of its column’s is multiplied by k) = kdet(A) so I confused the both
in kA you're multiplying every column by k, so you pull out a new factor of k for each column
hence k^n det A
Yup, I just mixed up smt
Thanks
What is a semi direct sum of vector spaces? Or rather, Lie algebras?
what's semi direct sum?
Um?
Is there a systematic way of doing (b) or am I just supposed to check everything.

Right. I get that {W + (0, 0, 1, 0), W + (0, 0, 0, 1)} is a basis for V/W, so does that mean that there are 4 cosets, since I can only form W + (0, 0, 0, 0), (0, 0, 1, 0), (0, 0, 1, 1) and (0, 0, 0, 1)?
yes. it may be helpful to just think of this using the dimension. as V/W has dimension 2 over the field F_2, it contains 2^2=4 elements
Ah.
vector space is closed under addition and multiplication. But isn't this trivial if we already "defined" as $+: V \times V \to V$ and $\cdot: \mathbf{F} \times V \to V$?
theyre really just equivalent phrasings
already asked in #groups-rings-fields
man
actually u only need W cap U={0}
now the proof of 1.44 is short. the forward direction should be apparent. for the backward direction, take two representations of the same vector in sum(U_i), ie sum(x_i)=sum(y_i), then show x_i=y_i for all i
being a sum is independent of adding up to V
Im trying to understand normal matrices and normal functions in general
if f is normal then
$$f \circ \hat{f} = \hat{f} \circ f$$
f hat is the conjugate matrix of f
i read that matrices with the same system of eigenvectors commute
is there some kind of intuition i can get from this for normal matrices and normal functions?
Yeah you can have a direct sum of two 1D subspaces of a 100D vector space and it's still a direct sum of the two subspaces
Can anyone help with this problem?
Suppose $b \in \mbb{R}$. Show that the set of continuous real-valued functions $f$ on the interval $[0, 1]$ such that $\int_{0}^{1} f = b$ is a subspace of $\mathbb{R}^{[0, 1]}$ if and only if $b = 0$.
bruh, what is happening w the bot
here, managed to get a picture

I'm taking linear algebra for the first time in a week. I want to get ahead and start reading the textbook. Anyone got any good linear algebra textbooks?
@wintry steppe still here ?
yes sir
depends on the syllabus, if you are taking it an undergrad level probably Axler or Friedberg
aude's recommendations are good if you're taking a theoretical course (though be warned that axler treats some topics later in the book in a rather unorthodox manner). is it a theoretical course, or something simpler (will you be focusing on matrices, row reduction, etc.)?
it's been down for everyone
happens from time to time
what have you tried and where are you having trouble?
well we know that to show U is a subset of V we have to show that U contains the additive identity, i.e. 0, that U is closed under addition and scalar multiplication
in this case, I tried letting U equal the set of continuous real-valued functions f on the interval [0,1] such that int_0^1 f = b where b = 0
I suppose I would have to show that F(x) = 0 is part of the set?
that is indeed the additive identity
right so
if we let the integral of f be F
and b = 0
can we not do F(1) = F(0) hence F(x) = 0 is a member of the set since F(a) = F(b) for any a, b in R?
you really don't need to use the fundamental theorem of calculus to do this
this is the only method I know how to use xd
and I'm not sure it's correct
haha
Its the first class in linear algebra
that doesn't really clear it up, do you have a syllabus?
"first class in linear algebra" could be anything
it might be more towards matrix theory in which case it will be a lot more computational than proof oriented
Let me show syllabus


That's the recommended book. I tried it but it wasn't very good
okay, definitely axler or friedberg is overkill for this
I gather you'd probably be fine with youtube alone
and some past papers from your university
i do not follow. you said previously F denotes the additive identity, but what is f?
f is a function in U?
also, "integral" should not be used interchangeably with "antiderivative"
Why is Axler so good
axler is terrible
Oh
jk
lmao
lol
u dont need axler or friedberg for this
axler is fine until you get to the part on characteristic polynomials
Im a physics and math major so I really want to understand linear algebra
Is it advantageous to read friedberg after I take this class?
I will be taking another linear algebra class yeah
why not
But it's gonna be in a year
but you're considering a particular one here, which you said yourself: F, the zero function
bruh
yes
"antiderivative" is a function which differentiates to your given one, "integral" is a real number quantity
oh
wait so you're saying I let b = 0 and f = 0
ok, so you want to use lowercase f to denote your additive identity
sure
so you need to show that: if $f$ is the zero function on $[0, 1]$, then $$\int_0^1 f(x),dx = 0$$
TTerra

oh the bot's back up
poggers
i'm just that good
well, if f(x) = 0
int f(x) is c and c bounded from anything to anything is c - c = 0
ez clap
you can be more direct
f is its own antiderivative, so the integral is f(1) - f(0) = 0 - 0 = 0
(by the fundamental theorem of calculus)
but you are right
so we have showed 1/3
so the additive identity is in U. what must you now check?
that U is closed for addition
i.e. if we have f in U and g in U then f + g is also in U
yes
try not to use the fundamental theorem of calculus for this one. look up "properties of integral" if you need to
$\int_0^1 f(x) \dd{x} = -\int_0^1 g(x) \dd{x}$
Aude

yes sir?
sure. both sides are zero
it feels a bit odd adding in g(x)
like I am not sure we are allowed to do that
are we
i do not know what you mean
well
you haven't done anything incorrect so far
wait f is any arbitrary function in U
you said what f and g are yourself. no problems here
yes so
wait they dont have to be distinct
can I just say 0 + 0 = 0
and call it a day
be more specific than this
well, we know LHS is 0 hence RHS is also 0
thus
$\int_0^1 f(x) \dd{x} + \int_0^1 g(x) \dd{x} = 0 \implies \int_0^1 g(x) = 0 \implies 0 + 0 = 0$
Aude

Since $f$ integrated over the interval [0,1] is = 0 and since g = 0 when integrated over [0,1], and 0 + 0 = 0 we conclude that f + g integrated from [0,1] is also in U
Aude

I might be stupid
this argument is really hard to follow

the sum of the integrals is zero, okay. this implies the integral of g is zero, but we already assumed this, so why state it? then you wrote 0 + 0 = 0
can you show me how to go from the integral of f + g to zero?
you mean
actually integrate it?
please go from $$\int_0^1 (f(x) + g(x)) , dx$$ to $0$ and state explicitly what properties of integrals you use
TTerra

separation of integrals
oh
I just realized
it
haha
write it down
smart
$\int_0^1 f(x) + g(x) \dd{X} = \int_0^1 f(x) \dd{x} + \int_0^1 g(x) \dd{x}$
Aude

but we proved previously that $\int_0^1 f(x) \dd{x} = 0$ and we have assumed that $\int_0^1 g(x) \dd{x} = 0$
Aude

Aude

It seems i am in a circular argument
you assumed right here that f and g are in U
f being in U means, by your own words, the integral of f over [0, 1] is zero
yes
so say here "but we assumed that \int_0^1 f(x) dx = 0 and \int_0^1 g(x) dx = 0"
not "proved that..."
once you have that, this step is good
but we assumed previously that $\int_0^1 f(x) \dd{x} = 0$ and we have assumed that $\int_0^1 g(x) \dd{x} = 0$
Aude

ah yes
and so the integral of f + g is zero, meaning f + g is in U
cool
yessir
okay
now
a remark on language
the property $$\int_0^1 (f(x) + g(x)) , dx = \int_0^1 f(x) , dx + \int_0^1 g(x) , dx$$ is called "additivity of the integral", not "separation of integrals". the latter phrase may be confused with "separation of variables", so avoid it
TTerra

U is closed under scalar multiplication, i.e. if $k \in \mbb{R}$ and $f \in U$ then $kf \in U$
Aude

Aude

Aude

Aude

cool
is that it
looks good to me
poggers thanks sir
mucho apprecionado
all of the exercises in this chapter are showing that something is or isnt a subset of something else
i would write it as: "assume that $k \in \bR$ and $f \in U$. then $$\int_0^1 (kf)(x) , dx = k\int_0^1 f(x) , dx = k \cdot 0 = 0,$$ where the integral vanished because $f \in U$. so $kf \in U$"
TTerra

just to make the reasoning absolutely crystal clear
subspace
subspace apologies
you still have the other direction of the problem to prove 
wait wut
"is a subspace of \bR^{[0, 1]} if and only if b = 0"
bruh
now I need to prove
left to right
yes
tears
this direction is much easier to prove
shall I use contradiction
up to you
you don't need to, but you probably could
direct proof is easier and shorter
wait
didnt we just do left to right
no
no we assumed b = 0
you did right to left. you assumed b = 0 and showed the set is a subspace
so now we need to force it into a condition where b must be 0
now you must assume the set is a subspace and show that b = 0
yes
use one of the conditions of being a subspace to show that b = 0
dont i just
int f(x) dx from 0 to 1
= b
f(x) = 0
ez
b = 0
$\qed$?
Aude

so f is the zero function (additive identity)?
yes sir
that's exactly the proof i had in mind
very nice
thank you sir
very nice
can I +rep you like on steam profiles
nope
but you can pay it forward
what does that mean in this context
oh
help someone else

well sure if someone is stuck in the first three uni channels i will
hey
can someone please show me how to calculate
Calculate the max which is P,
P = 18x + 24y + 20z
8x + 12y + 12z ≤ 1240
6x + 8y + 4z ≤ 700
4x + 4y + 4z ≤ 480
are x, y and z also required to be nonnegative
Is it possible to find out what a transformation is if we have the initial and final states of the vector?
if you only have a single vector, no.
if you have that info for all vectors, then that is the linear transformation
well actually, let me step back a bit
if you know your transformation is linear, then we have the following fact:
- a linear transformation on a vector space is uniquely and completely determined by what it does to a basis of that space
(the codomain doesnt matter here (unless it's {0}), only the domain does)
so if your domain is a 1-dimensional vector space and the vector you know isn't the 0 vector, then yes, that information is enough to determine it
but linear transformations on 1-dimensional vector spaces arent very interesting
if your vector is, say, from ℝ³, then you would need three (linearly independent nonzero) vectors to determine the transformation
as an aside, this is why we care about bases of vector spaces
and the general concept - look at part of a space to determine the behaviour of "special functions" on the whole space - comes up a lot in advanced algebra as a whole
not just linear algebra
e.g. an abstract algebra student would learn that the same thing holds for groups, substituting "linear transformation" with "group homomorphism" and "basis" for "generating set"
(as well as a slightly-different-but-practically-similar phrasing using the quotient by the kernel)
Hi, sorry for being a bother but I am going through Gilbert Lang's linear algebra playlist. Although I know what free variables, degrees of freedom, etc are by definition, I can't figure out how they affect the column space. Does this mean I would have to revisit basic algebra? or should I continue with the playlist and it will click one day?

function which takes two inputs from S and gives you one output in S
https://en.wikipedia.org/wiki/Cartesian_product here's what the S x S means exactly
For (a), the eigenvalues are (2,2,1). Then I solved the systems: (i) (A-2I)v = 0; (ii) (A-I)v = 0;
For (i) we get x = y and z = 2x as a solution, so (1,1,2) is an eigenvector for A.
For (ii) we get y = 0 and z = 2x so, (1,0,2) is another eigenvector for A.
However, since we only have two linearly independent eigenvectors for A it means that we can't build a basis for R^3, and so A is not diagonalizable.

Can anyone check if my reasoning is correct?
since you have to take an inverse of a matrix with linearly dependent vectors, yes, such operation can't be performed
Is anyone here familiar with linear algebra that I can DM?

can someone walk me through this problem

i really don't get this jcf shit
it seems that the only eigenvalue of T is 0
to start, the dimension of the eigenspace is the number of jordan blocks, so up to permutation you have two possibilities: a 1 x 1 block and a 3 x 3 block, or two 2 x 2 blocks
(the eigenspace is two dimensional)
$\det(xI - P^{-1}BP) = \det(x(P^{-1}P) - P^{-1}BP) = \det(P^{-1})\det(xI - B)\det(P) = \det(xI -B)$
mns

ok?
How do we know this
one way to figure out what it must be is to use the minimal polynomial. the characteristic polynomial of your matrix is t^4, so the minimal polynomial must be of the form t^n for some small n. here, n will be the size of the largest jordan block corresponding to the eigenvalue, so either n = 2 or n = 3. for n = 2 this doesn't annihilate your operator, but for n = 3 it does, so your jordan form must be a 1 x 1 block and a 3 x 3 block
just calculate it lol
write out what T does to an arbitrary matrix
But I can't find a matrix for T
why? M_{2 x 2}(\bC) has a perfectly good standard basis you can use
so i did that and i still can't figure it out
using the standard ordered basis $$\left{\begin{pmatrix} 1 & 0 \ 0 & 0 \end{pmatrix}, \begin{pmatrix} 0 & 1 \ 0 & 0 \end{pmatrix}, \begin{pmatrix} 0 & 0 \ 1 & 0 \end{pmatrix}, \begin{pmatrix} 0 & 0 \ 0 & 1 \end{pmatrix}\right}$$ you should find that $$\begin{pmatrix} 0 & 0 & -1 & 0 \ 1 & 0 & 0 & -1 \ 0 & 0 & 0 & 0 \ 0 & 0 & 1 & 0 \end{pmatrix}$$
TTerra

ohhh
i somehow forgot that the space is 4 dimensional and thought it was 2 dimensional
for my explanation you don't need to compute this matrix, but it does help
you do, and you can do that directly from the image you just posted
yes
the image you just posted
do the work and you should find that the only eigenvalue is zero, and the eigenspace is $$\left{ \begin{pmatrix} a & b \ 0 & a \end{pmatrix}, a, b \in \bC \right},$$ two dimensional
TTerra

i'm still not sure how you would get that
i don't understand how the only eigenvalue is 0
i'll write out the first step for you
ok
"assume that $$\begin{pmatrix} a & b \ c & d \end{pmatrix}$$ is an eigenvector with eigenvalue $\lambda$. this means that $$\lambda\begin{pmatrix} a & b \ c & d \end{pmatrix} = T\begin{pmatrix} a & b \ c & d \end{pmatrix} = \begin{pmatrix} -c & a - d \ 0 & c \end{pmatrix}."$$
TTerra

you get four equations, plus the fact that not all of a, b, c, and d are zero simultaneously
play around with it
but this just means T(M)=0 always
i'm so confused
"only eigenvalue is zero" does not mean "linear transformation is zero"
if lambda = 0 then T(M)=0
then refer to this
read what i wrote
"assume that ... is an eigenvector..."
have you done this?
i'm not going to write out the casework here for you
i will say though, that it might be helpful to look at the bottom left entry
with the solution i wrote in mind, you could assume that c is non-zero and try to get a contradiction
ok so we have lambda c = 0 so either lambda = 0 and/or c = 0. if c = 0 (and lambda != 0) then note that lambda a = -c = 0 so a = 0, but this means d=-a =0. then the whole matrix is 0. thus, both lambda and c must be 0
well if c is nonzero and lambda c = 0, then lambda = 0 and lambda a = -c = 0 so c=0
which is a contradiction
either way we get both lambda and c are 0
then also a-d =0 so a=d and b can be arbitrary
i see
you forgot about b here, b could still be anything
this here is correct
but it is not clear how you've gotten \lambda = 0
(once you've shown \lambda = 0, though, the rest of the explanation for a = d works)
you just need to say a little bit about b in the first line and you're all set
if lambda != 0 then lambda a = -c = 0, so a would be 0, lambda d = c = 0 and lambda b = 0 - 0=0, so b=0
sounds good to me
casework done, we've proven this
yeah
now
the goal is to figure out which of these two possibilities it must be
for this, i used the minimal polynomial in my message following that one
yeah the minimal polynomial is x^2
x^3.
T^2 is not zero, but T^3 is
by the definition of T
you are literally given T
you can compute T^2, T^3
(T \circ T and T \circ T \circ T)
yeah T^2 = XE^2-2EXE + E^2X
ohh
don't do the hard work twice
it's not terrible since E^2 = 0, leaving T^2(X) = -2EXE
but you'd probably like to avoid multiplying matrices if possible
ok but T^2 has -2c in top right
yes
so T^3=0
yes
ok
the problem is done
its 3 and 1?
yes
i actually don't know how to determine that
the multiplicity of an eigenvalue as a root of the minimal polynomial is the size of the largest jordan block corresponding to it
here, it's 3, so you have to have a 3 x 3 jordan block

you can use that too
but it doesn't seem very intuitive
it's not
the minimal polynomial solution i gave is a lot more intuitive (imo)
at least it's straightforward to use this
\lambda is zero and you already know what the powers of T are, so the answer i wrote pops out from this pretty quickly
oh its basically the same thing except your method is finding which power of the operator is 0 which is the same as finding when the dimension of the nullspace stabilizes
something like that
the minimal polynomial is the only way i can remember this stuff 
the point i stopped paying attention in LA is probably the point where we got formulas like this
yeah our instructor gave us this example for similar type of problem

i didn't understand what he meant by nilpotent parts of both jordan blocks for 1 square to 0
i think i'm going to use this method lol
i can't understand the head or tail of this stabilizing of dimension of kernel stuff
ok thank you very much
almost every single JCF problem i've ever seen posted here, when it's not explicitly "find a basis which puts operator into JCF", can be solved using the minimal polynomial
i want to try to do it the other way after being informed by the minimal polynomial way since i actually want to understand what is happening lol
and if you take an abstract algebra class and get to see the module/PID decomposition theorem, you'll be thinking of things using minimal/characteristic polynomials anyways
i've taken an abstract algebra but they didn't cover modules or PID lol we did have minimal polynomials in field theory tho
not in ring theory
idk why
usually abstract algebra does groups/rings/fields with modules optional
my class did modules at the expense of doing almost no field theory
weird class
thankfully the module theory has been more useful to me
yeah my university has the undergraduate version of abstract algebra then lets us take the graduate version of abstract algebra after which covers the stuff in detail i think
idk tho haven't taken the 2nd one
if you're interested in learning the technical bits of JCF stuff, friedberg's book has your back
i remember the exposition there being pretty clear
oh
we are using LADR but the instructor doesn't follow it very well
e.g. he skipped from eigenvalues (chapter 5) to generalized eigenspaces and JCF (chapter 8)
when i took LA the prof put some pretty detailed summaries on JCF, finding JCF, etc. on the course website: http://www.math.toronto.edu/payman/mat247/main.html
i personally found it pretty useful so i'll share
wtf lol
ok tyvm oh u went to utoronto!
i was considering that but then chose not to because international fees are way too high 😔
it's way too expensive for international students lmao
i'm from toronto so it's not that bad, but the international fees are truly ridiculous
yeah its ridiculous but its not like i'm paying half that amount for an in state public university here in the states anyway 😢
$\det(xI - P^{-1}BP) = \det(x(P^{-1}P) - P^{-1}BP) = \det(P^{-1})\det(xI - B)\det(P) = \det(xI -B)$
this ok?
mns

yes it is fine
More
p(T) is a map from V to V? I.e. p(T) : V -> V ? Because I am not understanding its action

and its action on the vectors of V? Is it p(T)v = (a_oI)v + (a_1T)v + ... + (a_nT^n)v ?
yes
One more thing
F[x] is the set of all polynomials with entries in F. But do we restrict the order of the polynomials or it can be any n as in a0 + a1x + a_nx^n ?
it's just the set of polynomials with entries in F. there is no restriction on the degree.
so the basis for F[x] is indeed a set {1,x,...,x^n} with n + 1 elements
no
that would be for the subspace of F[x] consisting of polynomials of degree n (or less)
so this space has infinite dimension?
does anybody have any idea how to do a)?
|.| btw represents elementwise absolute value and inequalities betweem those mean elementwise inequalities

Question, given a unitary transformation T, it follows that <Tu,Tv>=<u,v>
however in the same light, <T*u,T*v>=<T(u),T(v)> right?
since <Tu,Tv> = <u , T*(T(v)) = <v,u>=<u,v>=<Iu,v> = <TT*u , v>=<T*u , T*v>
basically both T and T* preserve dot product , and not only T
Unitary matrix implies TT* = T*T = id
@clear iron What you're saying amounts to the fact that T* is unitary when T is
Which is kinda like saying T⁻¹ is invertible when T is
yea exactly
that's what my little sketch was based on
well.. yea
but it is correct tho.. no ?
bruh
im having trouble researching
info
about "lineal combination"
anyone knows where i can find this for dummies D:?
you probably mean linear combination
and there should be lots of stuff on the internet about that
are you looking for something specific?
I know
I just tackled a question that ruled that property out when asked about properties of unitary Transformations
a linear combination of elements $v_1, \ldots, v_n$ in a vectorspace $V$ is a sum $a_1v_1+\ldots +a_nv_n$ with scalars $a_1, \ldots, a_n$ of your field (for example real numbers)
Denascite

yeah that linear, maybe that was the word that i was missing
thanks bro !
What would be distinct linear factors?

like (x-k1)(x-k2)...(x-kn) with ki different from kj for all i,j in {1,...,n} ?
I can imagine this means that a linear operator T is diagonalizable if its minimum monic polynomial consists of (x-a1)(x-a2)...(x-an) for ai the eigenvalues of T
yeah this is true
since the eigenvalues are the roots of m_T
Indeed
So linear factors are the (x-a) whereas a non linear factor is (x-a)^b with b != 1
i think you usually call the second one linear factor with multiplicity b
multiplicities and all that become important for JNF and that stuff
Yes, another way to see this is just to consider what the min poly of a diagonal matrix is
So I got a bit confused with this now
the theorem is refering to linear factors which are of the form (x-k) , i.e. , with b = 1 in (x-k)^b
right?
Hum ok, I see it. I needed to check something for the case of a diagonal matrix with two eigenvalues equal
$$for every n \in \mathbb{N}_{\geq 2}$$
give a Matrix A such that
$$A \in \mathbb{C}^{n \times n}$$
$$A is diagonalizable, A is nilpotent$$
meaning that
$$there is a basis of eigenvectors, A^t=A$$
~Martin

i am not good at thinking in C, which is why i have problems with this task
what's the easiest matrix you know
I would say the easiest is the 0 matrix but yeah identity works too
nilpotent not idempotent
so there exists k such that A^k=0
$$for every n \in \mathbb{N}_{\geq 2}$$
give a Matrix A such that
$$A \in \mathbb{C}^{n \times n}$$
$$A is diagonalizable, A is nilpotent$$
meaning that
$$there is a basis of eigenvectors, \exists k: A^k=0$$
~Martin

if you want to use text inside $$this,$$at least use $$\text{\text}$$
Denascite

$$\text{for every } n \in \mathbb{N}_{\geq 2}$$
give a Matrix A such that
$$A \in \mathbb{C}^{n \times n}$$
A is diagonalizable, A is nilpotent
meaning that
there is a basis of eigenvectors, $$\exists k: A^k=0$$
~Martin

not pretty but works i guess
cant i just say the null matrix is diagonalizable and nilpotent?
if you want inline math you can use $n\in\bN_{\geq 2}$ for example
Denascite

yes
ok it never said that i can not use the null matrix so lets go with that
but if i wouldnt want to do that, i think in R there would be no other matrix right?
why do you think that
i read that somewhere tbh
if you want, try proving it. what is the minimal polynomial of a nilpotent matrix. and what do you know about the minimal polynomial of a diagonalizable matrix?
the min poly of a diagnalizable matrix falls into linear factors of power one
for nilpotent matrices the min poly is x^k where A^k=0
if a matrix is nilpotent and diagonalizable then the min polys are the same
so which min poly does the matrix have?
x^k=(x-0)^k
so k=1
so m(x)=x
what is the original question again
$$n \in \mathbb{N}_{\geq 2}$$
give a matrix for every n such that A is nilpotent and diagonalizable
~Martin

given that $A\in\mathbb{C}^{n\times n}$
~Martin

nilpotent and diagonalizable implies zero, no?
and if m(x)=x is the minpoly then what is the matrix?
that's what we are currently proving, yes
aint this like, obvious 
the only eigenvalues that a nilpotent matrix ever has are zero
I guess yeah that's easier lmao
yeah but the task looks like they want a non zero matrix
so you are sure that there is no such non zero Matrix in C^nxn?
no it does not say the matrix must be nonzero

how do i prove this 💀
wait can i just multiply them and show that its the identity
that would be mega troll and almost certainly not the way i'm supposed to do it
why would that be mega troll
well its like
i feel like i'm supposed to show it without multiplying them
because this is the 2nd part of a question that asked
to find the eigenvalues and minimal/characteristic polynomial of inverse
I guess yeah you probably have to use that. given that J_m(lambda)*J_m(lambda^-1) is not the identity anyway
wait what
it only says that the inverse has that jordan normal form
it doesn't say that the inverse is equal to it
wait do you have any ideas on how to do it
well use the min/char polynomial. it tells you quite a lot about the jordan normal form
once i show that the inverses thing is true then its a simply matter of taking the direct sum of the jordan blocks right
something like that probably, yeah
interesting
are each of the jordan blocks linear transformations
if so, then what is the domain and codomain and stuff
i'm still slightly confused
nvm ignore my musings
In 3D space since each direction adds a new span, all vectors can be linearly independent?
Or are the vectors for the vectors for the x and y direction always linearly dependent?
what do you mean by that?
So like
3D space is just the 2D span moved throughout the Z direction. If vectors I hat and j hat both make up the span that’s being moved through the Z direction, are I hat and I hat always linearly dependent?
what do you mean by always what choice is being made here?
are they the \hat i and \hat j from the canonical basis?
Yes, assuming that both of those vectors are basis vectors. From what I think I understand, if two vectors can be represented as a resultant vector, they’re linearly dependent. So if 3 vectors are describing space, are two of them guaranteed to be linearly dependent? My original question was if x and y were always linearly dependent in 3 dimensional space since they can be represented as a resultant vector
But thinking it out, I’m suspecting that’s wrong and now I’m wondering if at least 2 vectors in 3D space are linearly dependent
yes
if they are "basis" vectors, then by definition they have to be independent
a basis is like a "minimal" set of vectors that "describes" space
here minimal means, it needs to be the minimum number and describe means to span
n
since in 3D space "all three" vectors in any basis are LI
any two of them are LI
And combining the span of both basis vectors would describe the 2-D plane making them linearly dependent to one another to describe said plane?
you mean LI?
Wouldn’t i hat be relying on j hats position to describe a vector in 2-D space?
what do you mean by relying?
the vector in 2d space is uniquely described by a linear combination of $\hat i$ and $\hat j$
Fractal

that is already implied by the notation (3,2),right?
its 3 units of i and 2 of j
coordinate notation is generally made to be compatible with the basis you are choosing
What would make a vector linearly dependent
a vector is always LD
linear dependece and independence is always relative to a set of vectors
if your set of vectors has a single vector, then it is LD
and that set is LI whenever you cannot write any of the vectors by a linear combination of the others (in a vector space to be clear)
sure, you could abuse terminology a bit and say the vector v is LI to the vector w (meaning the set {v,w} is LI)
A set containing a single nonzero vector is linearly independent
oh ok
true
a set with a single non-zero vector should be independent
my mistake
when i looked at fractal's message, i just KNEW someone was going to come in and correct them
there's always someone who has to come in and say non-zero
am i getting trolled hard and missing something or is this just an ass problem? (i know i haven't done the jcf yet)

oh i'm getting trolled hard
i missed a condition
me being bad at math again
wait nvm its fine
the condition that i missed doesn't matter
wait can someone confirm that i'm on the right track here
actually, they missed the non-zero part
I said LD when should have said LI 

Why do you think it's B
what's the zero vector of (i)?
Because it is equipped with vector operations over its R
that means very little
Oh wait
Then the vector is irrational
and as for (iii), look through the axioms of addition in a vector space, and check which ones subtraction doesnt satisfy
if any
||a-b is not equal to b-a||
Oh I get it now.
sooo none of them are vector spaces
Option is F. Finally.
(i) lacks a zero vector, (ii)'s vectors dont work with its scalars, and (iii) does not have commutative addition
Got it
So let’s say if a 2x2 matrix has eigenval 3 and 5 should the matrix be $\begin{pmatrix}3 & 0 \ 0 & 5\end{pmatrix}$
Tony Chiba

TTerra

it must be similar to the matrix you wrote, though.
two distinct eigenvalues, two by two matrix, so you've got a diagonalizable matrix on your hands
Oh got it as long as either b or c is 0
that isn't the case either.
Oh
I thought as long as b or c is 0 the eigenval is always the same
And the matrix is diagonalizable
Anyways

I’m not sure how to show T is a linear transformation
verify that it satisfies the definition of a linear transformation
So X is just a random 2x2 matrix?
careful throwing around the word "random" like that
but yes, X stands for a 2×2 matrix, being the input of T
Okay so X is a transformation matrix that I have to find
no
you are not "finding" anything
you are verifying that T is a linear transformation
to which end you should be applying the definition of linearity
which you should know, or it should be in your notes

your verification of additivity is ok
but for homogeneity you made an even number of mistakes that cancelled each other out
also try not to make your opening parentheses look the same as c's
an even number of mistakes that cancelled each other out
lmao
i love it when this happens
although their proof of homogeneity looks fine to me
i don't see where the mistakes lie
(cAX - XA) is how i read the thing right before cT(X)
it looks like i fell prey to their conflation of c with (
another reason never to use c for scalar
How so?

like the "intersection" between all those polynomials is empty?
for k = 3 we would have t1 = (x-a2)(x-a3), t2 = (x-a1)(x-a3) and t3 = (x-a1)(x-a2) then t1 "cap" t2 "cap" t3 = empty as there will be a factor missing the (sigma_i)
in a sense, yeah
Yeah pretty much. They'll have n-2 common factors pairwise, but altogether they won't have any.
the (normed/monic) factors of t1 are {1, (x-a2), (x-a3), (x-a2)(x-a3)}, similarly for the other ones and then the intersection is just 1
Consider T : R^2 -> R^2 defined by T(x,y) = (y,0)

Then the matrix representation of T on the basis {(1,0),(0,1)} is (0 & 0\1 & 0)
Notice that T^2 = I. The characteristic polynomial is x^2 which coincides with minimal polynomial. Hence T is not diagonalizable as the minimal polynomial is not a product of distinct linear factors
What's wrong in here?
Notice that I didn't used the fact that the scalars are over C as it will for sure influence the result. Therefore, my question is where it should've been used?
The characteristic polynomial is not x^2
my bad, I wrote the matrix representation wrong. Edited
Well no
Characteristic polynomial is the smallest polynomial p such that p(A)=0
Notice it's p(A)=0 not p(A)=I
T^2 = I means that T^2 - I = 0 so the minimum polynomial is x^2 - 1
that's the minimal polynomial
Oh oops sorry
But in any case the minimum polynomial divides the characteristic polynomial
So x^2 can't be the characteristic polynomial either
The characteristic poylnomial is det(xI - T)
and indeed the minimum polynomial divides it
so it could be x or x^2
and only x^2 yields the zero matrix
So sorry just woke up and mixed up a lot of things 
But also yeah I just remembered this theorem says the minimum polynomial not characteristic polynomial
Is (x^n-1) a linear factor?
x^n - 1 is the product of distinct linear factors over C.
remember roots of unity stuff
ohh
degree n, so it couldn't possibly (outside of the trivial n = 1 case, in which yes it is linear)
So I was reading about how to find eigen values. How come this equation solves the determinant? Like, what's the basis for this method?

Ping me if anyone knows. TIA
How come this equation solves the determinant?
As in, why are eigenvalues the roots of dot(A-X*I) ?
@umbral elk
Not this equation but the ones that simplifies the det.
V= Lambda
V³ - [sum of diagonal elements]V² + [sum of diagonal minors] - |A| = 0
Ohh right
This is more general than this actually, for an $n\times n$ matrix $A$, the characteristic polynomial is $$X^n - \text{tr}(A)X^{n-1}+\ldots + (-1)^{n-1}\text{tr}(\text{Com}(A))X + (-1)^n\det(A)$$, up to a factor $(-1)^n$ depending on the definition
Syst3ms

$\text{Com}(A)$ is the matrix of minors of $A$
Syst3ms

Let me briefly explain the reason for this
We use det(XI-A) to define the characteristic polynomial, just multiply by (-1)^n if needed
The constant term is (-1)^n*det(A) because it's what you get when you evaluate det(XI-A) at 0
The dominant term is X^n because it's only reached for the product of diagonal elements
As for X^(n-1)
I'll finish the explanation
no worries
you didn't need to delete, now i feel bad
Lol, I want to take a screenshot of this so I deleted
ah ok
Do you happen to know the definition of the determinant as a sum involving the symmetric/permutation group?
I don't think I do. No I don't. Sorry. I'm just skimming over some important topics. 🤐
Don't worry, it's not very digestible anyway
$\det(A) = \sum_{\sigma\in S_n} \epsilon(\sigma) \prod_{i=1}^n a_{i,\sigma(i)}$
Syst3ms

The sum ranges over all possible permutations of n elements
What epsilon is doesn't matter too much here
All that matters is that it's a sum of various products of entries, indexed by permutations
In XI-A, the terms that contain X are precisely the diagonal terms
To get a term in X^(n-1) by this formula, we'd need a permutation with exactly n-1 fixed points
But if it sends n-1 numbers to themselves, it has to do the same for the last one, otherwise it wouldn't be a permutation
All of that to say that the only contribution to the X^(n-1) term is when you expand the product (X-A_11)(X-A_22)...(X-A_nn), and nothing else
And the X^(n-1) coefficient of such a polynomial is famous, and it's -(A_11+...+A_nn) = -Tr(A)
wow
And let me recall how we prove the coefficient of X is Tr(Com(A)), i.e the sum of the diagonal minors
Ohh
Okay, so the proof I remember uses something that sounds really cursed : the derivative of a determinant
Oh god
The reasoning is that the X-term of a polynomial is the constant term of its derivative
So if we get a nice-enough formula for the derivative, we can just evaluate it at 0 to get the answer
The determinant derivative formula is not that bad
What level is this
Like, it's not complicated but the calculation is too long.
If you study determinants in the general case you'll probably come across this
Not even
Let me do it
(might take a while to write it all though)
Yes, i have encountered derivatives of det when I was reading about them
If you have a function of the form $t \mapsto \det(A_1(t),A_2(t),\ldots,A_n(t))$, where $A_i$ are column-valued, the derivative is $\det(A'_1(t),A_2(t),\ldots,A_n(t))+\det(A_1(t),A'_2(t),\ldots,A_n(t))+\ldots \+\det(A_1(t),A_2(t),\ldots,A'_n(t))$
Syst3ms

There we go
It's like a product rule of sorts
If you apply this to the function that is the characteristic polynomial, each of the terms will look something like $\begin{vmatrix}1 & -A_{12} & \cdots & -A_{1n} \ 0 & X-A_{22} & \cdots & -A_{2n} \ \vdots & \vdots & \ddots & \vdots \ 0 & -A_{n2} & \cdots & X-A_{nn}\end{vmatrix}$
Syst3ms

Ohh yes
However, that first column makes it so you just get a diagonal minor when evaluated at 0 (up to a (-1)^(n-1) factor)
I remember now
Each of the terms gives you a different diagonal minor, so all in all you get Tr(Com(A))
The derivative of det part.
In the 3x3 case, you fortunately can use these special cases only
Likewise in the 2x2 case
That's nice
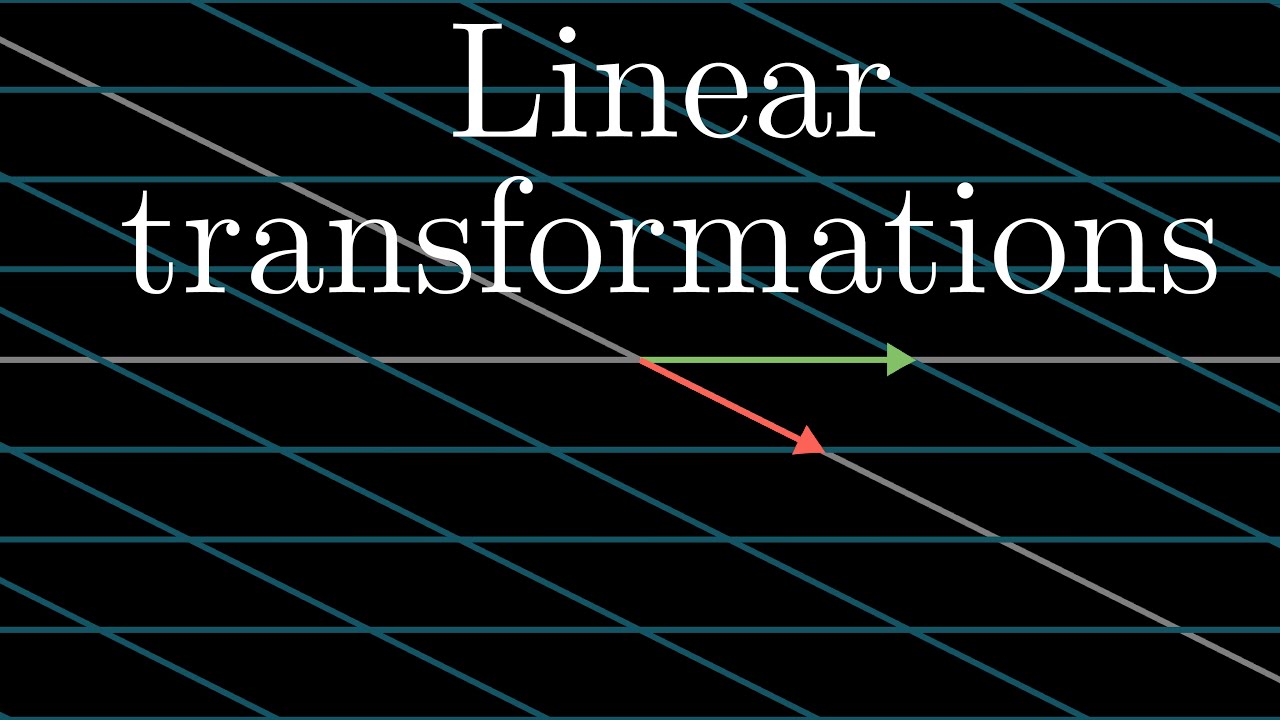
I was watching the essence of linear algebra by 3b1b, and I have a question. Grant mentioned that whenever a transformation takes place, and the transformed grid, as long as it remains parallel, evenly spaced, and has a fixed origin, the transformed vector will still maintain the same properties. I just wanted to know why this is the case.
Like in this image why does a transformation that remains parallel, evenly spaced, and has a fixed origin not affect v = -1(i-hat) + 2(j-hat). why does it remain the same?

as you've written it right now (though it appears kind of word-salady), it need not be the case that -1i + 2j remain as -1i + 2j even after being transformed. it may so happen by coincidence, but it need not.
what it will be no matter what, however, is -1T(i)+2T(j).
(as long as T is linear of course)
Depends on the country, and at what level you study dets
Yes, grant said the transformation had to follow rules for -1i+2j to remain the same. But why do those rules make -1i + 2j stay the same?
can you share the video and the timestamp
can you link to the specific timestamp? I think you might have misunderstood something. for some linear transformations there will be vectors that remain the same. not for all transformations and those vectors will in general be different
bc i really feel as if you are misunderstanding and/or saying this incorrectly
Quite possibly the most important idea for understanding linear algebra.
Help fund future projects: https://www.patreon.com/3blue1brown
An equally valuable form of support is to simply share some of the videos.
Home page: https://www.3blue1brown.com
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through P...
Hey guys, any ideas for the proof of the second statement? (P1 and P2 are polynomials and T is a linear transformation V->V)

like in the 2-3 minutes following this
hold on
let me transcribe exactly what is said
If we play some transformation and follow where all three of these vectors go, the property that gridlines remain parallel and equally spaced has a really important consequence: the place where v lands will be -1 times the vector where i-hat landed plus 2 times the vector where j-hat landed. In other words, it started off as a certain linear combination of i-hat and j-hat, and it ends up as that same linear combination of where those two vectors landed.
a far cry from requiring -i+2j to up and stay the same! as you can see the 'physical' vector undergoes quite a change.
this is what grant is saying

yes the physical vector undergoes the change, but the formula still remains the "same"
sophomore hs. That's where they teach the basics. Like, really basic stuff.
in truth, it is this preservation of linear combinations that is actually how we define what it means for a transformation to be linear. and the grid line thing is secondary to it.
unpack the notation. write P1 and P2 explicitly
How to check for injectivity and surjectivity? check if dim(ker)=0 and dim(img)=dim(co-domain)?
dim(ker)=0 injective
And dim(img) = dim of transformed matrix
@winter pond did you manage the 2 last questions in your pic ?
Yeah I was able to but I’m not exactly sure
if you want to post your workings we can check
@slender yarrow I've tried it. Can you please check if my working is fine
sure
@slender yarrow



It's alright yeah
There's simpler ways for the "is T injective/surjective ?" parts though
For injectivity, you just showed ker(T) is not 0
That's pretty telling in itself right @toxic apex
Yup. Realised after solving it😂 . Thank you @slender yarrow
does the modul Z/6Z have a basis?
my idea is {1}
a friend said 1*6=0
but 6 is already 0
can someone explain the part that i underline pls

how does 1l = cos(alpha)1x + sin(alpha)1y
Now I’m looking at it. I did it terribly wrong. 😭
It was an assignment and I submitted 😭
I got a restriction on b. What I did was when I equate it to 0 I moved XA to the other side and equate them
So AX=XA
That could work also if you get the same results in the end tho