#linear-algebra
2 messages · Page 289 of 1
what name is used for it?
in engineering books like boyd's, this is a denoising problem
Any references?
not off the top of my head. it's anyways pretty easy because the target and constraint are both differentiable, you can set it up yourself
set up what?
I'm trying to show that U is a subspace of R^2 but I'm not quite sure that this does the trick.
According to the material from my course, showing that U is a subspace can be limited to showing that both vector addition and scalar multiplication are closed and defined for U; is that really all I need here? What about the basis and dimension of U?

how to solve it with gradient based methods without ever needing to find pinv or bases
since you said you dont want that
oh sorry didn't mean to interrupt
this works, clock
I would highly doubt this being possible, I went through some papers going over the literature for QP, and you generally either have to construct a basis, or do the projection, there's no escaping it afaik
The bonus of the conflicting case is that the projection is more nasty
if you want the exact sol, yes
nice thanks
if you're ok with an iterative alg that converges to it, no need
I agree that it falls under convex optimization with projected gradient, but the projection is the efficiency-wise nasty part
i never said projected grad tho
then I am not sure what method you had in mind
interior point method?
Are you suggesting to relax the projection part?
yep
can't say much without a specific method, doesn't ring any bells except DS and DS*, but those were relaxations for doubly stochastic matrices
otherwise you're looking at variations on kkt, so stuff like interior point methods or active set methods
Yeah I was digging through kkt for a while
you could pick an epsilon for Ax approx b and log barrier it, for example
I found this: Optimization with Least Constraint Violation
Though it's wsy too complex for what I am solving
all of these approaches tend to go with an extra hyperparameter and a sentence something like "it can be shown that for a correctly chosen value of the hyperparam, it solves the original problem"
but the proof doesn't tell you how to pick it 😛
my recommendation, depending on how strict the constraints are, is either log barrier, or to simply minimize f(x) + mu || Ax - y ||
where mu is in some obscure way related to || Ax - y || < \epsilon
this latter one should inherit the convexity flavor of f(x) in your case
The first and simplest thing I would try is throwing cgnr at the singular system, if this proves too slow I will likely go with your suggestion of f(x) + mu ||Ax-y||
so possibly strictly convex and positive def
given vectors a and b and scalars x and y, does this hold or have I lost the thread here?
x(a+b) + y(a-b) = 0
xa + xb + ya - yb = 0
(x+y)a + (x-y)b = 0
==> implies that x = y = 0 ??
seems like there's got to be something wrong with it that I'm not seeing
there's no reason for this to be true unless you know a and b are linearly independent
right, yes. that's the connection I was struggling to make.
the proposition is: given linearly independent vectors a and b, are the vectors (a+b) and (a-b) also linearly independent?
aha
but because that is the assumption of the proposition, it should hold right?
yes
c = x +y and d = x - y
then we have ca + db = 0, which is a linear combination of a and b
and since a and b are linearly independent, we know that the only solution to this is c = d = 0
so you rewrite it as a linear combination of the original vectors and simply evoke the definition of lin indep
oh man I am relieved that it makes sense after all
if they were lin dep, this would not necessarily be true
thank you for explaining that :)
I need to make flashcards with these definitions I think; that reasoning was only like 3/4 of the way formed in my brain until you wrote down basically the translation of what I was thinking
it takes a while to get the hang of it
and linalg is usually one of the first proof-heavy courses people take
take your time to digest it
👍
what can be the equation of negative y-axis?
What do you mean?
Shouldn't this be 55?

I used this
you don't need that
but didn't see the minus
AND THE 2
$|x|^2 = x\cdot x$
mannnnnnnnnn
and substitute x = u-2v
what?
I give up on life
then use linearity to distribute the terms
you missed a square
I missed a square
criver, this is exactly what ur describing
criver

except with a different argument
No I just did the quiz
and I put 55
because I'm blind and dumb
and I didn't know why
but didn't see the minus and the 2v
My brain assumed it was | | u+v | |^2
my brain also used to get fried at exams
I would walk out 5 steps out the door and it would start working
I think it's the sitting for extended periods of time, no blood circulation to the brain
does it mean I need more practice?
I understand the concepts we're going through for the majority of the part
no, that seems like you simply solved a different problem
try solving it right now with the correct thing
but then I will literally burn my quiz,tests, and exams because of little mistakes I make
and since it's online school, we don't get marks for doing the work
we only get marks for getting the answer
welp

i know the definition of an induced matrix norm (kinda) but idk where to start for this proof
i know that both the row sum and column sum norms are alpha so could i use that fact in the proof?
@polar vessel Note that $A_{\alpha} = \alpha I$. The definition of induced matrix norm is $$\lVert A \rVert = \sup_{|v| = 1}|Av|.$$ Can you finish now?
IlIIllIIIlllIIIIllll

i know that as well but i cant see how to construct the proof
Compute the supremum
huh?
im sorry im lost
so Av is a vector
would the supremum be the largest value of the vector?
sup is equivalent to max here (since we are in finite dimensions, due to compactness of the unit sphere)
So $|A|$ is the maximum value of $|Av|$ over all unit vectors v
IlIIllIIIlllIIIIllll

what does "over all unit vectors" mean? i think understanding that will clear things up
It means $$|A| = \sup{|Av| : v \in \mathbb{R}^2 \text{ and } |v| = 1}.$$
IlIIllIIIlllIIIIllll

oh ok
Note that each occurence of $||$ has a different meaning here
IlIIllIIIlllIIIIllll

yeah thats another confusing part
One is the induced norm, one is the norm on the domain of A, and once is the norm on the codomain of A. To be explicit I should have subscripted these differently
isnt v the domain and Av the codomain?
Both domain and codomain are $\mathbb{R}^2$.
IlIIllIIIlllIIIIllll

But they can have different norms.
im confused is that relevant to the proof?
It says "any induced matrix norm"
ok
That means that you have to show it is true for any norm on the domain and any norm on the codomain
ok
Here is the more explicit specification: $$|A|{\text{induced}} = \sup{|Av|{\text{codomain}} : v \in \mathbb{R}^2 \text{ and } |v|_{\text{domain}} = 1}.$$
IlIIllIIIlllIIIIllll

so im not really understanding this
can you give me an outline of the proof you have in mind because i have no idea where u are going with htis
If $|v| = 1$, then $|\alpha Iv| = |\alpha||v| = \alpha$.
IlIIllIIIlllIIIIllll

Thats it
ok so the A = I * alpha part i understand but where does the assumption |v| = 1 come from?
anyone know what the teacher means by "find two vectors having lots of square roots"?

Here
oh wait nobody answer this I just got an idea and wanna see if it works first
@polar vessel You want to compute $$|A| = \sup{|Av| : v \in \mathbb{R}^2 \text{ and } |v| = 1}.$$
IlIIllIIIlllIIIIllll

@polar vessel The most direct way to compute a supremum or maximum like this is to compute each element in the set and then find the maximum.
Here it happens that the only element in the set is $\alpha$.
how can i compute each arbitrary vector v
IlIIllIIIlllIIIIllll

how lol. i feel like im having a mental lapse here
IlIIllIIIlllIIIIllll

I showed it eariler. You use the norm axioms and definition of $A_{\alpha}$.
IlIIllIIIlllIIIIllll

Actually
There was a flaw in my work
We need the norm on the domain and codomain to be the same
Check your definition of induced norm to be sure
if |v|=1 then |Av| = 1*|A|
there is no mention of domain nor codomain in our definition
@polar vessel It's implicitly $\mathbb{R}^2$ for both, since a 2x2 matrix acts on vectors in $\mathbb{R}^2$ and produces vectors in $\mathbb{R}^2$.
IlIIllIIIlllIIIIllll

so now we are down to |A| = |I*a|
So |I| = 1?
I is identity matrix
i mean it makes sense to me. every norm i can think of has this property
Yes $|I| = 1$ as long as we use the same norms on domain and codomain
IlIIllIIIlllIIIIllll

otherwise its not true
Does this check out?

no
why
equality 2
i figured
It's correct
huh?
since $A_{\alpha} = \alpha I$.
IlIIllIIIlllIIIIllll

what
$$A_{\alpha} = \alpha I \implies |A_{\alpha}| = |\alpha I| = |\alpha| | I |.$$
IlIIllIIIlllIIIIllll

right i have thatr
yeah now basically the question is whether $|I| = 1$
IlIIllIIIlllIIIIllll


Because if the norms on the domain and codomain are different, then $|I|$ might not be 1. For example, we can let the codomain have $10$ times the norm of the domain. Then $| I | = 10$.
IlIIllIIIlllIIIIllll

Yeah in your picture both norms are subscripted by v, so I guess they are the same
Then it's easy to see from the definition that $|I| = 1$.
IlIIllIIIlllIIIIllll

yes so is my logic in my proof correct then
I'd do $|A_{\alpha}| = |\alpha I| = \alpha |I|$ first. Then I'd show that $|I| = 1$. Then I'd conclude.
IlIIllIIIlllIIIIllll

for that use the definition of induced norm
oh it would be like |Ax|/|x| = |x|/|x| = 1, since A = I
So this?

@torn stag if this logic is correct then i can easily finish the proof
yeah thats correct
shoot it says orthogonal vectors in the theorem [editing in progress]
fixed*, is this completely correct?

Is this proof correct?

how to solve this?

the 2 norm involves eigenvalues and i know that eigenvalues of orthogonal matrix are +-1
This is the proof I came up with

why is lambda = 1?
why not just use the definition of ||A||_2?
eigenvalues of Identity matrix are 1
explain what you mean
your proof is fine
Whats the complement bar here for? Isn't this only over the reals? or are we allowing complex arguments?

it has to be real since its restricted to the domain [0,1] i think right?
unless it has complex coefficients?
yea that's what I mean
Ok thanks. Me sleep and finish tomorrow with fresh brain like the light blue name said last week 
guys why is the 1st one right?

its clearly linear, check that its bijective
In a 3x2 matrix, why do we say that the column space lies in R^3 space? Shouldn't it be in R^2?
$\bmqty{&\ &\ &}$
Ann

this is what a 3x2 matrix looks like
Yes.
its columns are of size 3
Correct.
So, does the dimension change when we look at the individual column and the matrix as a whole?
??
Col(A) is a subspace of R^3...
the colspace of any 3 by m matrix is a subspace of R^3
the columns of A themselves lie in R^3
The above matrix has a dimension of 2 as there are 2 variables, but looking at the column and treating it as an individual vector I find it to be in 3d space.
matrices do not have dimension
In terms of geometric represenation?
i have a feeling you're overthinking/overcomplicating it
Col(A) is a subspace of R^3. dim(Col(A)) can be 2, 1 or 0 depending on what A is
if you consider the matrix as representing a linear map, it'll be from R^2 to R^3.
Suppose we've these equations:
1x + 4y = b1
2x + 5y = b2
3x + 6y = b3
When we represent them in matrix notation, why do 1 and 4, or 2 and 5, or 3 and 6 go with a different variable(x and y) if they lie in the same dimension?
What I mean is, 1 2 3 form a column vector in 3d space, and each component belongs to a specific dimension. If both 1 and 4 belong to the same dimension, why do they pair up with x and y, which appears to be different?
??????
with all due respect, what the hell are you talking about
no
don't DM me
post the diagram here
Alright.
i think you're trying to overcomplicate how matrix multiplication works

sure... you can view this equation as $xv_1 + yv_2 = b$
Ann

1 2 3 is a vector in 3d, am I right?
if you meant [1; 2; 3] then yes this is a vector in R^3
Good. So, 1 2 3 each of them lies in a different dimension.
Similarly, 4 5 6 lies in a different dimension.
But, the dimension of 1 and 4 are the same. If they are in the same dimension, then why are we pairing them with a different variable, as in x + 4y = b1, etc.
By dimension I mean the usual dimension we talk about. 2d, 3d, etc.
you clearly mean something very different than the meaning of dimension in the context of linear algebra.
dunno about anyone else but i'm done here.
✌
could u pl elaborate
To check if a given map is an isomorphism here, it suffices to check that it's
- linear, and
- bijective.
As Rokabe pointed out, it is easy to see that it is linear, so you should verify if it's bijective.
in the case you know a priori that the two finite vector spaces have the same dimension, it suffices to check if the map is injective or surjective, since a linear map between two vector spaces of the same dimension is bijective iff injective iff surjective due to rank nullity
"finite" 
I don't know how do I express this in matrix form

do you know about quadratic forms
I don't know how to express the k'(x1x2+x2x3) term
can I include that term in the matrix?

you can, as a hint try to compute $\m{x & y} \m{1 & 2 \ 3 & 4} \m{x\y}$

@wintry steppe were you able to solve?

1-2/3=1/3
I know they get -2/3 by doing $-\frac{2}{\sqrt{3}} \cdot \frac{1}{\sqrt{3}}=-\frac{2}{3}$
John doe

they're subtracting the vector (0,1,1) from (2/3,2/3,2/3)
yeah
What's the problem exactly?
why is it possible to move the 1/2 outside of the scalar product here?

because inner products are linear( bilinear)
so is it an application of this rule that I can't see?
I can see how this rule is applied as the second step of solving it
^ that's what it seems like to me but I can't find that rule and I'm not sure how to derive it myself
it seems right
it's a generalization of the associative property of multiplication isn't it?
because a * b is the same as b * a
yeah
alright then it makes sense and all is well... until the next exercise that I don't understand comes along ;)

just set k=0 and you recover the rule <a,hc>=h<a,c>. The way stated in the picture is just more succinct
also this is commutativity, not associativity
that's a very helpful observation, thank you
totally right; learning this in multiple languages doesn't really make it easier to remember which word it is 😂
that's fair
import numpy as np
#(a)
v = np.array([[1, -1, 1, -1],
[1, 1, 1, 1 ],
[2, 0, -2, 0 ]])
dot_1 = v[0,:].T @ v[0,:]
dot_2 = v[1,:].T @ v[1,:]
dot_3 = v[2,:].T @ v[2,:]
I am applying the grammatrix, G = V.T*V right
It is supposed to be give 0'
but it doesnt
why
why would they yield 0?
why should it be zero
are you saying the vectors are orthogonal to themselves?
it seems you misunderstood the problem
but when I apply the formula it doesnt
it will never work here
the dot product of a vector with ITSELF is equal to its 2-norm squared
the 2-norm is positive definite
but if I say V[0].T @ V[1] it gives me 0
ofc
you misunderstood the question, please reread it carefully
the only vector for which V^T V = 0 is the 0 vector
V.T @ V doesnt give the norm?
ok then tell me how do I apply the grammatrix

wdym "apply the gram matrix"
the gramian of a matrix with orthogonal columns will be diagonal
well, VV^T
V^T V has no special structure here
the cols are not orthogonal, the rows are
i think you mixed up several things at the same time
Make the Grammartrix for 𝑣0, 𝑣1, 𝑣2 and confirm that this collection of vectors is orthogonal.

mhm
mhm
the gramian is A^T A
what?
didnt you just say thart
it isn't JUST the norm
it's a matrix
and each entry in the matrix is a dot product
huuh
so you can use it check whether the columns of a matrix are orthogonal
i'm sorry, i can't help you
why
you need to go review matrix multiplication
can you write the product A^T A in terms of dot products of the columns of A?
or let's take a step back
you know how $y \cdot x = \langle y, x \rangle = y^T x$?
Edd

this is all you need
express the matrix product A^TA in terms of dot products of pairs of columns of A
mhm
and then you can see
if all the $v_j^T \cdot v_i = 0$ when $i \neq j$, then the vectors are orthogonal
Edd

and the gramian V^T V, where V has the v_i as columns, contains all of these dot products
Are e1 e2 and e3 the orthonormal basis in this note example? Are is v1=1, v2=x, v3=x^2?

And these be the results of a different domain with same basis?

normalized as in ||v|| =1?
thats what the teacher said the solutions were in class i thought
And i did something quite wrong here

oh i forgot to sqrt the norm but i think even fixing that its weird

like the y axis has the equation x=0 right?
so I want such an equation which is satisfied by only the points which lie on the y-axis. examples of such points can be (0,-1), (0,-3), etc.
i can vaguely read what that python code's doing, but its still a bit over my head
So like what are the steps to solving it as a person? Or is it identical to the code
yeah so they're the same as the ones in the notes
just with different roots
well different way of writing them
same value
so, knowing the values for that one; how can I manually compute e1
knowing the value of what
the 1/\sqrt{2}
so i know what the answer should be

oh wait the norm is different i think i just realized
its <v1, v1>, but not the ordinary squaring I did before
sec

and repeat this right
ye
ok i butchered the second one mainly because idk how to do this apparently

I tried (x-1/2)^3/3
as its F(x)
$\frac{1}{3}\left(x-1/2\right)^3$
MattDog_222

but i guess i'm having a lapse in calculus because the power rule isn't working
it will work

make sure you change the limits accordingly
wait why would i have to change the limits. Isn't it still -1 to 1
ya I though you are using subs
ok so I was right on that part, I just forgot symbolab expands sometimes

but i still got the wrong answer
nevermind I dont know how to use calculators 🤦♂️
forgot to wrap my 1/3 in parenthesis 
so it does infact give the coefficient

wait no idk where I remember seing 7/6
I must have done something wrong with the numerator but i cant find it

this is getting 1x somehow

nevermind I forgot to square 😐

its the little things 
so back to the matter at hand; I need to apply that concept and work to this interval, correct?

and so if it asked for "The complete orthonormal set on [-1,1]" would this be the "set"? I thought it was a basis 😐

In general it’s nice to know that if you integrate any odd function from -a to a, it’s 0 for any a.
Saves work

True

say that I have a linear map F given by this matrix. Is there a "quick" way of finding a ON basis for R^3 consisting of eigenvalues of F? I know that I can first find the eigenvalues of this matrix, then find the eigenvectors, then choose 3 different eigenvectors corresponding to different eigenvalues and then use the Gram-Schmidt but this is very painful

use WA
what is that?
wolfram alpha
lmao 
Since this is real symmetric, all the eigenvectors are orthogonal for distinct eigenvalues. So you only need to graham schmidt on eigenvectors that have the same eigenvalues
So after you diagonalize, most of the work should be done already
Cuz if the eigenvalues are distinct you just normalize
Yes
Assuming there are no repeats
I can’t tell you off the top of my head if there are repeats but it doesn’t look like it to me
I got that the eigenvalues are 3, -3 and -3 again
Well then you gotta graham Schmidt the -3 eigenvectors
finding spectral decomposition for anything >=3 is a pain
and not recommended
just use computers, if you are allowed
Spectral decomposition above 3 is only ok if it’s separable
Preferably in powers of 2
Beyond that, 100% use a computer lol
so for -3 I got that the basis for the eigenspace is (1, 0, -2), (1, -2, 0). So I guess I choose these two elements and gram schmidt these?
and then for the third one I just normalize
Yeah
okay okay
I still won't do it
thank you so much!
except for cI_n ones
I only do it for quantum gates because you know the common ones so well you can just write down the answer ;)

On this note, Tokidoki you may be interested in the spectral theorem
It’s pretty sweet
oh right I forgot about it
(c) Confirm that 𝑣3 := 𝑥 - 𝑃𝑥 is orthogonal to 𝑣0, 𝑣1 and 𝑣2.
v = np.array([[1, -1, 1, -1],
[1, 1, 1, 1 ],
[2, 0, -2, 0 ]])
u = np.array([3, 2, 1, 0])
counter =0
v3_check = set()
for i in range(0,3):
x_min_Px = u @ v[i, :] - u @ v[i, :]
v3_check.add(x_min_Px)
for item in v3_check:
if item == 0:
counter +=1
if counter == 3:
print("v3 is ortogonal to 𝑣0, 𝑣1 og 𝑣2.")
(d) Use 𝑣0, 𝑣1, 𝑣2, 𝑣3 to determine an orthonormal basis for ℝ4.
But v3 is just 00??
mind showing the problem?
(c) Confirm that 𝑣3 := 𝑥 - 𝑃𝑥 is orthogonal to 𝑣0, 𝑣1 and 𝑣2.
(d) Use 𝑣0, 𝑣1, 𝑣2, 𝑣3 to determine an orthonormal basis for ℝ4.
a and b dont matter
i think they kind of do.
b) Calculate the projection 𝑃𝑥 of
it's impossible to tell what x is, what P is, what the v_i are
can you please show that
and also show where you're being instructed to use python
(a) create the grammatrix for 𝑣0, 𝑣1, 𝑣2 and confirm that this collection of vectors is
orthogonal.
also this line
x_min_Px = u @ v[i, :] - u @ v[i, :]
feels kind of suspicious since the value here will always be 0
it is numerical alg
please just post the entire problem at once
please just post the entire problem at once it's very very very annoying to see it delivered piecemeal
i don't care if it's in danish
post it anyway
if there's anything that needs translating i'll tell you
ait

so you want to project x onto the subspace spanned by v_0, v_1, v_2. yes?
#(b)
u = np.array([3, 2, 1, 0])
pr_v0_u = v[0,:]*np.dot(u.T, v[0,:]) / np.dot(v[0,:], v[0,:]) # [0.5, -0.5, 0.5, -0.5]
pr_v1_u = v[1,:]*np.dot(u.T, v[1,:]) / np.dot(v[1,:] , v[1,:]) # [1.5, 1.5, 1.5, 1.5]
pr_v2_u = v[2,:]*np.dot(u.T, v[2,:]) / np.dot(v[2,:], v[2,:]) # [ 1., 0., -1., 0.]
print(pr_v0_u,"\n",pr_v1_u,"\n",pr_v2_u)
#We have now found the points that are closest to the vector u
already did that here
I am trying to solve d
but I dont know what v3 is
I just used the formula to get the closest point
thats what I thought the problem asked for
idk

that's for projecting onto one vector
or equivalently, that's for projecting onto the line spanned by one vector
you're projecting onto a subspace of dim 3
that's different
a subspace of dimension 3...
ait
however, as your v_i are orthogonal (and you are asked to verify that in part a), it happens that the projection onto this subspace is the sum of the projections onto each v_i
obv this only works because of this orthogonality
is your teacher so strict that they forbid you from using anything that isn't a formula that they explicitly taught you
probably
last time I tried to solve something differently that wasnt taught he said it was wrong 😄
did he elaborate on why it was wrong? or did he just dismiss it out of hand?
i mean
without seeing that problem i can't say for sure
but it may well be that you got the correct answer by sheer coincidence
really would like to see the problem and your solution exactly as-stated now
ait
give me a sec
then
okay maybe I didnt explain the steps 😄

(d) Set up a linear system of equations for a function
𝑓 (𝑥) =
𝑝1 (𝑥), for 5.0 ⩽ 𝑥 ⩽ 8.0,
𝑝2 (𝑥), for 8.0 ⩽ 𝑥 ⩽ 10.0,
where 𝑝1 (𝑥), 𝑝2 (𝑥) are quadratic polynomials such that
(i) 𝑝1 (𝑥) passes through the data points at time 5.0 and 8.0,
(ii) 𝑝2 (𝑥) passes through the data points at time 8.0 and 10.0, and
(iii) in time 8.0, 𝑝1 (𝑥) and 𝑝2 (𝑥) have the same slope.
it is the last part
where I have to set the slopes to be equal
the $16a_1 + b_1 = 0$ and $16a_2 + b_2 = 0$?
Ann

these?
yea
yeah no you should have had $16a_1 + b_1 = 16a_2 + b_2$
Ann

you can't just assume out of hand that f'(8) will be 0 specifically
but the values of the coefficients are correct
at least I think so
since I made a plot


@zinc timber sry to @ but can you run that script on [0,1] and see if this is what u get

were you told specifically that p1'(8) and p2'(8) had to both be zero or were you only told that they must be the same?
you can have the code if you want
" 𝑝1 (𝑥) and 𝑝2 (𝑥) have the same slope."
so you were not told that this slope had to be zero. yes?
idk python [dont have pycharm setup or numpi]
if they are both zero they have the same slope tho
so you were not told that this slope had to be zero. yes?
please do not avoid the question.
wht
yeah and if i have a million dollars then i'm a millionaire.
what 😄
you do realize that it is very much possible for the two quadratics' common slope to be something other than zero, right?
the slope could be 1
or 2
or 42069
it could be anything
you can't just decree that it HAS to be zero simply because you decided on it.
yea but it just says the same slope
IT SAYS THE SAME SLOPE
IT DOESNT SAY THE SLOPE IS ZERO
IT DOESNT SAY THE SLOPE IS ZERO
i don't know how else i can say this!
there is nothing in the problem that indicates the slope has to be zero!
you are essentially saying "A = B therefore A = B = 0"
alright
also tbh your plot is bordering on garbage with how you're plotting 65 below 50


No, a plane is 3 points
this is a line and a perpedicular line
use grahm-shmidt process?
yes
dim(U) = 2
okay so how do I answer d?
Vocab irrelevant, both both dim 2
once you actually calculate Px and then x-Px properly, and once you verify that x-Px is orthogonal to v0, v1 and v2, you will have that {v0, v1, v2, v3} is an orthogonal set and your job will be to turn it into an orthonormal set
and if you know what both of these are, it should be rather obvious how to do it - hopefully without requiring a formula to be handed down on a silver platter.
what was the formula for px being the sum?
...i guess you could look up the formula for projection onto a subspace
or projection onto the span of several vectors
there has to be a better way that gram shcmit right? D:
seems like I should be able to figure this out but I'm stumped: given this fact: vector a is orthogonal to vector b when <a,b> = 0
how can I find actual examples of vectors that are orthogonal when I know one of the vectors but not the other?
a = (3,4)
<a,b> = 0
b = (x,y)
3x+4y = 0
x = (-4/3)y
=> ....
what now? 🤔
there will be ... infinitely many solutions, but what about just one?
?

good enough, i suppose.
It very simple to calculate with gram-Schmidt since dim(U) = 2.
but I need 2 bases
i need U and U perp
can i treat them seperately?
like i get what u mean about dimU = 2, but I think i need to do all 4 on an ordered basis of R4 such that the first 2 vectors are 1 2 3 -4, and -5, 4, 3, 2
55

i would love to not do that [4x gramschmid] tho if its possible
what have u done? It says to create an augmented matrix, so have u done that yet?
I don't understand the problem
I just needs someone explain to me to solve the others
u set up an augmented matrix and use gauss-jordan elimination (RREF or row reduce)
Row
?
Is this an application
How to use it
u had to have covered it in class if they're asking u to do it
R1 ← R1 + R2 for example
Oh
v = np.array([[1, -1, 1, -1],
[1, 1, 1, 1 ],
[2, 0, -2, 0 ],
[0, 1, 0, -1]])
v @ v.T
would this be the answer to d?
no

.
refer to this again
refer to your knowledge of the difference between the words ORTHOGONAL and ORTHONORMAL
an orthonormal vector is just when it is orthogonal and length 1 right
So I guess I need 1 in the diag
there's no such thing as "an orthonormal vector"
orthonormality is a property of sets of vectors, not of individual vectors
but yes, an orthonormal set is an orthogonal set with the extra condition that all vectors have length 1
What literature should one read to get into quantum communication with basic undergrad knowledge?
so i have this, but im getting (-77)²+56²+39²+38² = 12030 which isn't a nice squareroot



nvm thats correct but he said we coulda used calculators 💀

It looks like it's the definition of a relation on R^2.
Not a particularly meaningful relation, mind you.
The condition simplifies to (a,b) R (c,d) iff (a+7)b = (c+7)d.
It's not clear that it is useful for anything except "find out if this is an equivalence relation" exercises.
I see are there any particular properties that you can spot?
Think of a few pairs of numbers that are related to each other...
Figure out if this is an equivalence relation
If it is, try to see what the equivalence classes are

@fringe zodiac Use the definition of linearly independent. This result is obvious because $U$ is an isomorphism.
IlIIllIIIlllIIIIllll

We haven't covered isomorphisms yet, would there be any way to solve it without? @torn stag
perhaps using basis?
@fringe zodiac You don't need to use isomorphism. This problem is easily solved directly using the definition of linear independence.
I'm just saying that the result is obvious from an algebraic point of view.
Alright, sorry for the confusion
Let me take a crack at it
Im a bit confused, working backwards i figured why T would be independent given B1...Bk's independence
But how can you know that B=UA is linearly independent if U is a matrix
Am I allowed to row exchange in a 2x2 hessian? I need my hessian to be positive definite, but it is:
12 0
0 12
Sorry for dumb question


why do you need to exchange rows? just check the values as it will be a lot easier
how are you concluding 3?
Oops I meant
0 12
12 0
Pretty sure that its a change of basis operation and should be $B = C^{-1}AC$
MattDog_222

I'd recomment watching this vid https://www.youtube.com/watch?v=P2LTAUO1TdA&list=PLZHQObOWTQDPD3MizzM2xVFitgF8hE_ab&index=13
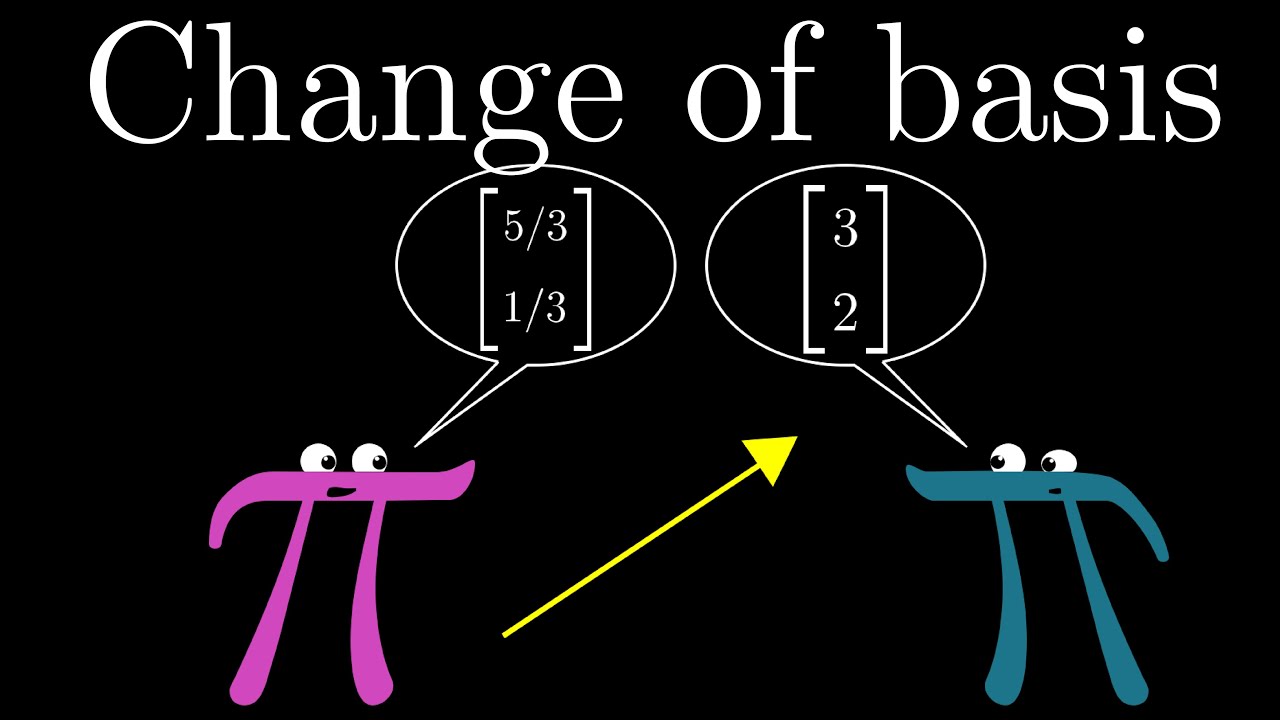
How do you translate back and forth between coordinate systems that use different basis vectors?
Help fund future projects: https://www.patreon.com/3blue1brown
An equally valuable form of support is to simply share some of the videos.
Home page: https://www.3blue1brown.com/
Future series like this are funded by the community, through Patreon, w...
and when he says we're going from "our language to jennifer's language" thats essentially saying ur going from $\beta_1 \to \beta_2$ or vice versa
MattDog_222

It is the answet tht is given
ill show a new pic
now you are cropping off the error messages

ok let me try without the c
but it says an error for the top part too though
nvm
I got it you were right
thank you man
is it okay to start this question by taking the cross product of u and v to get p?

i.e, p = u X v
i just don't really know where to start with this T.T
we use different language I think, im guesing what you call the determinant is what we call the magnitude?
since I don't have any numbers to work with, i'm guessing I'd have to do it using this formula :
nah, should just be the magnitude of the cross product

ah i was mixing up two things
there's a different way to get the area using determinants
yes, the norm of the cross product
(magnitude)
right
alright, i've gotta do this on mathematica
make them equal?
nvm i might have misunderstood
i think i better just go calculate the cross product first
but yes, the next step would e to find the projections on the respective planes
and then the result might help with the intuition
yeah i mean initially i was really worried by the projections part because i don't know how i'd calculate that without any numbers
but we're also told that a projection onto the xy plane gives the coordinates a,b,0
and so on
maybe that helps?
i would invite you to think of the planes as being spanned by subsets of the canonical basis of R^3
what you said is basically the consequence of what i just said
if you take the vectors [1,0,0] and [0,1,0] and do an orthogonal projection onto them,
I know those are linear alg terms but I can't remember them being defined properly in any of the lectures / readings
what is a "subset of the canonical basis of R^3" , I don't even really know what "span" means at this stage. maybe I could look at some linear alg videos on youtube for this?
this is also used in the definition of your problem
i think you'll have to go review the definitions before you start
He has used the terms when talking about examples but he hasn't really defined them explicitly
span is the set of all linear combinations of a set of vectors
I vaguely know what they mean because of videos i watched in preparation for this unit.
e.g. any point on the xy plane can be expressed as a linear combination of the vectors [1,0,0] and [0,1,0], so these two vectors span the xy plane
we haven't really covered linear combinations or even matrices yet
all we've learned about so far is vector projections, area of paralellogram, area of paralellipid, and some geometry stuff in r^3
i could just peice the information together myself
i guess that's all you need, then
let me have a longer think about what u said
and then i'll get back to you
if ur around ofc
if you just accept that the projections onto a plane mean setting one of the coordinates to 0
I
when you say orthogonal projection, are you talking about
this

this type of thing?
the way i constructed it there is probably wrong
im struggling with how to find the area M,N and O for the LHS

I have the value of the projection
to get the area, i'm guessing i'd need to take a cross product
but I don't really have another vector to take the cross product with
like for eg, for N I have the point (a , 0 , b) as my projection
but i don't know what to cross it with
v3 = u - Pu
#u - Pu = u - a1k1 + a2k2 + a3*k3
#w2 = u - w1
#w2 orthogonal to w1
would v3 be orthogonal to Pu?
when they are orthogonal you can always make them orthonormal right
with Gram-Schmidt yes
and well sometimes it's only about dividing the vector by its magnitude
if they are orthogonal already
how do I get around this?

Hey im unsure how to do this question, I expanded out the rhs using the vector triple product rule, then the left hand part is perfect so I want the right hand part to equal 0, but im unsure as to why it does

'a' not defined
to use 'a' as a symbol, you need to make it one
use sympy, or better yet sagemath
why do you want rhs to be zero
that's not zero unless it's a straight line, you are calculating curvature
ty
I literally quoted the error message python gave you

Sorry hopefully my working will help @zinc timber
On the first line, if the second part equals zero it gives the form I want
Yeah sorry my message was confusing, I feel like what I have done is wrong but does that part equal zero somehow?
I can only think it would if r''=0 but that's not stated in the q anywhere
Or is there some other way of doing it?
R^3 represents 3d space so what does p_2(R) represents ? And what about other vector spaces do they have any physical representation like R^2,R^3?
T is the unit tangent vector right? It's not arc length parameterized so why dT/dt = r''/|r'|?
P_2(R) is polynomials of degree ≤2 with coeffs in lR
Yeah but whats their physical representation
if you choose a basis, they do act like R³

I assumed that differentiating this with respect to t would give that, is that wrong?
My que is how to imagine p_2(R)
no the denominator is also a function of t
@zinc timber What would the left hand side equal? Im struggling to know what to rearrange to
guys the standard basis vectors are always the eigenvectors of a matrix ?
thank u @lavish jewel

Unsure if this is the right channel, if not I'm sorry. Does anyone have an idea what I can change or add to this formula to get my force values to approximately equal each other? Only D changes as the towing angle increases. I will send someone a tenner if you sort me out, been trying for too long xD

criver

this is some polynomial that is quadratic in t, and quadratic in s, taking the derivative with respect to t and equating to 0 and taking the derivative with respect to s and equating to 0 should a system of two equations. There may be an easier way though, using the fact that the shortest distance is along a line segment orthogonal to both lines.
Has anyone seen this ? https://files.eric.ed.gov/fulltext/EJ923724.pdf Seems like the method indeed holds up and can be used for finding inverses of matrices
here's a simpler solution: https://math.stackexchange.com/questions/210848/finding-the-shortest-distance-between-two-lines

Mathematics Stack Exchange
I know how to find the distance between a point and a line, not between two lines.
Find the shortest distance between the lines $(-1,1,4) + t(1,1,-1)$ and $(5,3,-3) + s(-2,0,1)$
Any help would be
isn't this just multiplying the rows by the denominator, you're paying for the fractions with large numbers
I also have a better suggestions than:
Freed from unnecessary computational demands, students were instead able to spend more time focusing on designing an appropriate system of equations for a given problem and interpreting the results of their calculations.
Let your students use a computer to compute inverses after they are done practicing tedious matrix inversion. And stop at 3x3 or 4x4 matrix inverses.
Yeah but the large numbers can be dealt by multiplying the reciprocal there was an optional step mentioned which that. I took Lin Alg a while back and remember doing a bunch of Gauss Jordan eliminations and asking whether there was a more eefficent method that had more speedup. The fractions don't come till at the end at the very last step
more eefficent method that had more speedup
there is - a computer
in fact in numerics one avoids computing the inverse where possible
Oh in my class we did everything by hand
if you have to solve Ax = b, you do not compute x = A^{-1}b, you instead use a solver than doesn't have to invert A
ahh kk makes sense
that's useful only up till the point that you learn what the idea is, beyond that it seems useless
you're not going to be inverting matrices by hand, even if you have something that you need the symbolic inverse of
you'd use a symbolic math package for that (to simplify determinants or whatever)
it would be stupid to make someone invert a 10x10 matrix for instance
in my class we had to do like an 8x8 for our final
unfortunate
Plus i'll have to reviewing for the gre so i've been looking at what stuff was missed in the undergraduate syallbus
We never did Linear Algebra over the complex plane nor talking about Jordan Canoical form and a grad student brtualized me for it
Can't believe undergrad maff dosen't go through everything 😢
some books do, some do not
tests are monkey business anyways, I've taken exams perfectly only to forget everything 1 hour after the exam
if you're just studying for a test motivation's typically pretty low, and rightly so
I was my DRP meetup and the head over there mentioned that there are things you would not see in an undergraduate course even in proof based courses
Huh relevant thread https://old.reddit.com/r/math/comments/tc7mjl/is_there_any_real_point_to_forcing_students_to/
reddit
152 votes and 68 comments so far on Reddit
anything that starts with forcing, usually ends with forgotten 1 hour after the exam
I still remember all of the stuff that I studied because I found it interesting for which I picked exercises that I chose, conversely I don't remember even 5% of whatever I had to study for some exam
I actually forgot a huge chuck of linear algebra while doing this thing in Rep. Theory (Representation Theory) I had the intuition from doing a bunch of linear algebra problems semesters ago and I was able to recall like basic things. But man I feel like I need to review linear
does the "span" of a plane represent its vertical and horizontal "sides" ?
no
span is the set of linear combinations of a set of vectors
i'm just trying to attempt this question

and i'm confused
i know that for the area of P, we can take the cross product of V and U
and take the magnitude of that
but I'm confused about how to get the area of everything else
idk if the fact that i don't really understand what it means for the vector v and u to span the paralellogram is contributing to this
apparently the first one is right... 2nd one is wrong...

i simply did 5^2 + 1^2 = c^2 and got sqrt(26)
so you found the length of v?
i found the length of u
in case it was not clear, i was asking if this was meant to be finding the length of v.
yes
well this is not at all what you were asked for
u and v are the SIDES of your parallelogram, not its DIAGONALS whose length you were asked to find
ack ty ty

is the 4th face just the grey shaded region?

it's the face that's obscured by the yellow, purple and blue faces
mhm so the base right?
like, if i saw the corner as a pyramid, the base would be the 4th face?
yep okay, so all i had for part A of this question was 2 vectors that spanned a paralellogram and we're supposed to use this idea to answer part b. Would the area of the coloured faces be given by the cross product of each of the two vectors onto the xy, xz and yz planes?
...
I changed what i wrote to try and make it a little clearer what i mean hopefully
your message is still incomprehensible unfortunately
do you have any suggestion on how I could start or a prompt maybe?
I might just rewrite the message again
no please don't
this is the question we did before

i don't want to have to read more nonsense
and we're meant to be able to use what we did there
perhaps if you want to go with the cross product thing

to do part B
you can say that the area of the yellow face is 1/2 ||u × v||
and likewise for the other two colored faces
mhm, i don't actually have the vectors though, can I just write u_1, u_2, u_3, v_1, v_2, v_3 a and so on?
............
you want to drown yourself in notation?
you want to deliberately give yourself nine whole variables to deal with and keep track of?
he wants us to use mathematica, so it might not be that bad using mathematica?
he said he deliberately made it so that it would be impossible to do by hand but i'm not sure that applies here. what would you suggest as an alternative?
you're introducing notation for the coordinates of u
if those are not variables then idk what is
am i to understand that you are specifically BANNED AND DISALLOWED from using such basic properties as the cross product being linear in both arguments, or that ||a+b||^2 = ||a||^2 + ||b||^2 when the vectors a and b are orthogonal?
or are you just being masochistic right now in your desire to have more letters to juggle
or what
i literally cannot think of any other reason why you would want to torture yourself like this
so would u and v correspond to a and b in this case?
no
nothing "corresponds to" anything
you're seriously overthinking things a ton right now
and it's distressing
ok i see what you're saying with this
This is way simpler, take f = v-u and g = w-u, then the area of the hidden face is 1/2 | f x g |
Note that f = u-v, g = w-v or f=u-w, g = v-w would have also worked
The only thing you need to know is |f x g| = |f| * |g| * |sin(u,v)| which is the area of the parallelogram with edges f,g, and the triangle is half that.
You don't need any extensions of pythagoras' theorem
You can of course do it for the 4 faces, but that's just extra work for no reason
how would i represent my skateboard as a 3D matrix? Im trying to apply a rotation matrix to my skateboard to represent a trick, but im not sure how to make my skateboard into a matrix i can apply the rotation to
You would discretise your skateboard and then apply the rotation to every point of it
e.g. make a triangular mesh, then transform each vertex
Could you walk me through this? I'm in high school and this is something I am doing outside of the syllabus so im not sure how to begin
what are you using to model your skateboard
can someone help me with this
what have you tried so far?
Do non-symmetric positive definite (in the real sense) matrices define inner product spaces?
Positive-definite in that all eigenvalues are of the same sign
I'm not handling complex numbers
inner products are symmetric
Oh
oh yeah
So they do not define an inner product, but they can define a norm?
And we say this norm is not induced (not possible to be) by any inner product?
how do you define your norm?
In the same sense as an 'inner product'
x^T S x
Where the 2nd x would be an alternative vector if we tried to define an inner product
you mean sqrt(x^TSx)
Wait does it matter
yeah, I think it works there
I've not thought through this myself
In this case $S$ does not have to be symmetric right?
pepper

I don't think it does, unless this somehow breaks subadditivity
(x+y)^TS(x+y) = x^TSx + x^TSy + y^TSx + y^TSy
Hmm the cross term is worrying
I'm not sure if it's possible to find some cross term that breaks subadditivity
it should look like this:
sqrt((x+y)^TS(x+y)) <= sqrt(x^TSx) + sqrt(y^TSy)
in the usual setting you just get 2x^TSy
I am not sure things will break
you can use Cauchy Schwarz to deal with the mixed term afaik
In the usual case yeah
I think you can just apply Cauchy-Schwarz twice
So we started bilinear forms in lin alg and my teacher started straight away by using forms of the type <u,v> = u^T Av for A a matrix. My friends and I guessed it was just because all bilinear forms are of this type and thinking about it this morning I proved this is true. However this means there is a natural identification between bilinear forms and matrices with respect to a basis, and so I’m wondering how we can see this as an identification between bilinear forms and endomorphisms
this solves it: https://math.stackexchange.com/questions/87199/maximizing-symmetric-matrices-v-s-non-symmetric-matrices
Mathematics Stack Exchange
Quick clarification on the following will be appreciated.
I know that for a real symmetric matrix $M$, the maximum of $x^TMx$ over all unit vectors $x$ gives the largest eigenvalue of $M$. Why is ...
Oop didn’t see this was still active sorry
don't mind me
for finite dimensional spaces sure
Yeah I meant for finite dim
you can write all your inner products as x^TAy where A is symmetric
or for the complex case x^TAy^* where A is hermitian and y^* is the conjugate of y
I’m talking about bilinear forms not inner products, so no necessary symmetry in A
ah, sorry
And I’m mainly concerned with understanding how we can identify forms with endomorphisms
Since both have a natural identification with matrices wrt a choice of basis
I’m thinking about maybe seeing the bilinear form as linear for a fixed u and seeing that you get an action on v like the dual of an endomorphism evaluated at u^T or something
And that endomorphism is A or A^T, something around those lines
isn't the standard trick to feed it basis vectors and derive things from there
No I mean I’m not trying to prove anything rn
Just see if there’s a connection between bilinear forms and endomorphisms
A.2 would probably be relevant for you
What makes you say that ?
As I understood it you want to show that any bilinear form can be represented through a matrix
I’ve already proved this 😂