#linear-algebra
2 messages · Page 198 of 1
it's a normal endomorphism in some prehilbert space
let $x \in V_{\lambda_1}$ and $y \in V_{\lambda_2}$. you want to prove that $\langle x, y \rangle = 0$. as a hint, consider $$(\lambda_1 - \lambda_2)\langle x, y\rangle$$
Terra

ah, thanks, will try it right now
@wintry steppe Would you mind explaining it a bit for me?
So, a spanning set S of a vector space V is a set s.t. every vector in V can be written as a linear combination of S
A basis is just the smallest spanning set? Why does linear independency make it the smallest spanning set?
Oh wait
I don't get how Dami's explanation explains the difference between a spanning set and a basis
I Googled a bit and now I understand what he means
It was what I was thinking too over here
Linear independency makes a basis the smallest spanning set because if there are vectors in the set that are linearly dependent, then they can be written as a linear combination of some set of other vectors (which will be smaller than the spanning set)
I'm pretty sure I wrote that wrong
But I understand now

wait
i was able to find a vector orthogonal to the two by using cross product
but the norm was not 3
any ideas?
the vector i got that was orthogonal was <-28,-28,-14>
well rescale it
If A and B are conjugate linear operators can you say they are commutating?
you mean B is the adjoint of A?
Let F be a field, V = Mn×n(F) the vector space of n × n matrices over F, and
B ∈ V . Define the linear operator T_B on V by the formula T_B(A) = AB − BA. Show that
det(T_B) = 0.
im unsure how to show the determinant of an operator defined generally is 0
any hints on this
Show kernel of T_B is non trivial
Yes
okay
so essentially here an element of the kernel is mapped to the 0 matrix?
Yes
Sorry, it's 0 matrix
okay i was overthinking this alot trying to show they have the same characterisitic polys lol
thank you
show that a linear operator over R with no real eigenvalues has positive determinant
okay so i know that the eigenvalues are all complex, but the characteristic polynomial has real coeffcients, so all the eigenvalues come in conjugate pairs, and since the det of T is the product of eigenvalues and c times c conjugate >0, the det is >0
is this enough or am i missing something?
yes this is enough
okay thanks
So I was wondering
By cutting cones in different ways you get all the possible equations of 2nd order, circles, ellipses, parabolas and hyperbolas, those are all the equations with things like x^2, y^2 etc.
What about equation of 3rd order? (aka with x^3 and so on) Does there exist some other weird 3d shape such that by cutting it in different ways we'd get all possible equations of 3rd order?
what do you mean by "order" here
degree? if so, note that conics only correspond nicely to degree two polynomials in two variables
that said, yes, there is a theory of higher conics!
we call them "algebraic curves"
sadly, you cant think of them as cut from a 3d shape so nicely
in general at least
Ah alright, it's still nice to know about the theory
I was trying to imagine some weird conic shape and cut it to get some elliptic curves but nothing seemed to work very well
im not being totally honest
you CAN think of them as cut from a 3d shape
its just not a "uniform" one like you have for conics
@arctic stone
Ty for the link and damn this is a a funny surface lol
yeah, the problem is that you have to construct them based off the polynomial you started with
wait nami so
so... not quite the same thing as conic sections
since conic sections work for any cones
no

So this 3d surface is only for a class of 3rd degree equations?
@arctic stone May you send the photo of this surface?
yeah, a given surface only gives rise to SOME OF the 3rd degree polynomials in 2 variables by intersecting it with the plane
Check the wikipiedia link sent above
I did check.
and damn that's still really cool
Yes.
This kinda surface is only for 3rd degree eq.
Not all 3rd degree eq's, right?
Yep
you can construct one from any 3rd degree polynomial
but it wont work for all other 3rd degree polynomials
So now we need a bunch of those funny surfaces for 3rd degree equations
My next question would be if every possible 3rd degree equation can be described as a cut from some 3d surface
or if there exists an outcast, a 3rd degree equation which cannot be represented as a cut from a 3rd degree equation
but I doubt that'd be possible
yeah theoretically we could just extend that 3rd degree equation into 3d
define F(x_1, x_2, x_3, ... x_n, y) = f(x_1, x_2, ... x_n) + y * something
then taking a cut by setting y = 0 gives you your equation
this works for any function of any degree in any number of variables
oh that's neat
this cut wont be particularly "nice" though
but it technically works
also, its worth noting: cubic surfaces arent quite as well-behaved as conics
in particular, its possible to cut them and get something that ISNT a cubic polynomial
in fact, theres a famous result called "27 lines on a cubic"
Oh? well that's quite surprising
which says that there exist precisely 27 such cuts that produce a straight line alongside another curve
I think it's not possible for 2nd degree surfaces like paraboloids etc
right, its not possible for conics.
conics are very very "special" all things considered
the smaller the degree, the nicer your polynomial behaves
[aside: newton tried to classify cuts you can make of a cubic WAYYY back]
Yupp true, it's quite surprising to me that we can still use matrices and other linear algebra methods for those 2nd degree surfaces
[he found, like, almost 100]
[he miscounted slightly but it was a pretty good attempt considering the mathematical tools of his time and the fact that he's mostly remembered for his calculus/physics, not his geometry]
by "classify cuts" i mean describe what sorts of thing you get from a cut
for conics we know we get 4, besides degenerate cases
circles, ellipses, hyperbolae, parabolae
(if you count circles and ellipses as the same, you get 3 instead)
(the point is, wayyyy fewer than cubic surfaces)
and for the 3rd degree we'd get all of these (and more) I think

yep
that perfectly straight line in the middle is what i was hinting at when i mentioned 27 lines on a cubic
there are exactly 27 for any cubic surface
which is pretty surprising
damn always 27?
its not an easy result to prove though
yep
27 cuts you can make that produce a perfectly straight, unbroken line
eg

oops thats supposed to be animated
one sec
Those cubics are really interesting and surprising
also I think I saw that gif a while ago

if you counted all the lines from all the different perspectives (which is annoying because of the spinning), youd get 27
(now theres a slight technical detail in that this result is usually framed over P^3, not R^3)
For 2nd degree surfaces it could be 0 straight lines or 2 (I think for hyperbolae)
P^3?
for a conic section you have infinitely many by going down the sides of the cone

I imagined a hyperbola instead of a simple cone
projective space, a slight modification of the geometry of R^3
it doesnt really change this particular result
but without it, theres edge cases you have to consider with lines at infinity and whatnot
projective space says that parallel lines "meet at infinity"
I've heard of something like that
the analogy always used is train tracks

Yupp that's it
anyway, it clears up these technical issues while still matching how we "feel" geometry should behave
so i wouldnt worry about it
i just mentioned it to avoid nitpicks
I'm still not that advanced in this field but exploring all these other things quite fun for me
yeah, this stuff eventually falls within the purview of classical algebraic geometry
which is a very rich and deep subject
a lot of very talented people have done a lot of work on cubic surfaces and theyre still not totally well understood
(https://en.wikipedia.org/wiki/Manin_conjecture comes to mind)
Ty for all the links btw it helps with understanding it
Hey so if im working in the 2x2 matrices over the field of 2 elements, the characteristic polynomials dont always split into linear factors right?
but im wondering why - if I have the matrix {1 , 1 ; 1 , 1}, the characteristic polynomial is (1-x)^2 - 1
Can someone teach me how to solve algebra?
but if I actually expand this: (1-x)^2 - 1 = 1 -2x + x^2 - 1 = -2x + x^2 = x^2 in F_2
,yes
so does the characteristic polynomial actually split?
That's true for any field in general
Yes,It does indeed split
x*x is a factorisation into irreducibles
so even though F_2 isnt algebraically closed the only matrices I can write in F_2 all have characteristic polynomials that split?
but I cant get that from the characteristic polynomials of 2x2 matrices over F_2
oh I see what you mean, yeah I cant get something like x^2 + 1 from the matrices available to me
x^2+1=(x+1)^2 in F_2
You can't factorise x^2+x+1 in F_2
Char polynomial of
$\begin{pmatrix}
-1 & -1\
1 & 0\end{pmatrix}$
Buncho Drunk

ahh gotcha, I think whats happening is that there's no matrices of rank 1 whose characteristic polynomials dont split
but there are some of rank 2 where they dont split
how should i go proving that
is finite, if and only if all diagonal elements of D are positive
D is NxN diagonal matrix
Ann

im not sure on the term but there is M > 0, so that /x/ ≤ M for all x € E
probably same as bound?
i dont know how to make straight lines without copy paste
what's your keyboard layout

try altgr + the >< key (left of Z)?
ah yes that works
anyway!
if all d_i are positive, you can show E_D is contained in the ball of radius 1/sqrt(m) around 0, where m is the smallest of your d_i
if there is an index i such that d_i < 0 then you can show that E_D contains all points of the form te_i for t ∈ R (i.e. the entire i'th coordinate axis)
im a bit confused on how that works
how what works
how to show that all values are in that radii of 1/sqrt(m)
let $m = \min_{i \in 1:n} d_i$
Ann

we have that $\sum_{i=1}^n d_i x_i^2 \geq \sum_{i=1}^n mx_i^2 = m \nrm{x}^2$
Ann

does that need explaining?
okay that makes more sense
so for any $x \in E$ we have $m \nrm{x}^2 \leq 1$ by the above
Ann

so if we have some D_i that is < 0, then m > 0 and m||x||^2 < 0
yeah then it checks out
if there's some d_i that is 0 or negative then E_D contains every point of the form (0,...,t,...,0) where the t is at position i and everything else is 0
How to find the range of the linear function T(v1, v2)=(v1, v2, v1+v2)?
I need some help with one exercise from an spanish book which says that if A is the set of all the circles in $\mathbb{R}^2$, C is the set of all the ellipse in $\mathbb{R}^2$ and D is the set of all hyperbola in $\mathbb{R}^2$, find $A\cap C, A\cap D$ and $C\cup D$
Fisher (Nero)

I just don't see it
A n C, for example, contains all circles which are also ellipses
which is just all circles
Hello, how do i prove that 1, sin x, sin 2x, ... ,sin nx are linearly independant? i started by writing: a + a_1sinx + ... + a_nsin nx = 0 and i proved that a = 0 but am not sure how to proceed for the rest of the coefficients.
Well, actually it's easy... when I read your answer I realised
do you have an inner product?
no
why do you need an IP to show they're indep.?
you can use the fact that orthonomal lists are L.I.
this isn't orthonormal... but it is orthogonal 
oh true
it is if your inner product is $$\langle f, g\rangle = \frac{1}{\pi} \int_0^{2\pi} f(x)g(x)dx$$
Merosity

that's a good idea
i think you can still do the thing too, without knowing about inner products. you integrate the whole sum with respect to sin(kx)
what’ll that do? why integrate it?
I was thinking we can maybe just sample points from k*pi/n and get a system of equations with determinant nonzero or something but I haven't thought through if that'd be actually good or easy
another thing that's gross is I'm imagining writing sin(kx) as a polynomial in sin(x) and then showing those polynomials are linearly independent... haha gross
$\int_0^\pi \sin(kx)\sin(lx) \text{d}x$ is 0 if $k \neq l$ and is some number i forgot if $k = l$
Ves

so then you just get $a_k(some number)$
Ves

and it's equal to zero
use the sine product formula to write it in terms of sums of cosines
when k is not equal to l
im still failling to see how that shows that sin kx and sin lx are lin.indep.
well, you do $\int_0^\pi\left(\sum_{k = 1}^n a_k\sin(kx)\right)\sin(jx)\text{d}x$. this gives you $\sum_{k = 1}^n \int_0^\pi a_k\sin(kx)\sin(jx)\text{d}x$. now you can show that $\int_0^\pi \sin(kx)\sin(jx) \text{d}x = 0$ if $k \neq j$, so this whole thing equals $a_j\int_0^\pi \sin(jx)^2 \text{d}x$
Ves

and since it's equal to zero, you divide by $\int_0^\pi \sin(jx)\text{d}x$ to get $a_j = 0$. this works for any $j$ with $1 \leq j \leq n$!
Ves

i don't remember how to edit the TeX 
should be sin^2(jx)
on that last message. and i meant the ! to be excitement, not n factorial
ok i think i understand, thank you very much!
basically, you multiply both sides by sin(jx) and integrate both sides, then argue that the integral of sin(kx)sin(jx) equals 0 when k is not equal to j (using the sine product formula i think)
no problem
oh there's a 1 somewhere in there which probably makes things more exciting

Can someone explain the third Remark to me? I don't get how the 2 sets aren't equivalent

not really, you easily show that the first coefficient is 0 (i just put x=1 so all sines =0 thus having only a=0)
Oh nvm
i see the first one is the set of all multilinear functionals
Vs the second is just the ones that are a tensor product

I forget how to do that
"show that there are elements of a tensor product space which cannot be written as a tensor product"
i.e., not all elements of V \otimes W are simple tensors
so what would be an example of that?
well finding an example is the point of the exercise 
here's a hint/suggestion: try it out with some simple spaces, like R^2 or something, where the outer product of vectors and tensor products agree (i think that's the case)
doesn't it always have to be some type of product though
because it has to map the origin to zero
in each variable
oh nvm i think i see
Thanks for the help
feel kinda dumb now lol
Unrelated to the question
aren't the two spaces isomorphic?
Is my understanding of this theorem correct?

The reason this is true is because if a row-vector becomes zero from elementary row operations, that means it can be written in terms of other vectors, which means it's linearly dependent
I think so. As far as I gather, two matrices are row-equivalent if they have the same row space. So whatever basis you find for one rowspace, it's also a basis for the other one.
is this for any matrix with real values?
im pretty sure all are false lol
take A and B 3 x 3 matrices, each entry different. To show it's false, it's enough to show one value doesnt agree on a row or a column.
I took A = (123) (456) (789), where () is a row. and B = (10 11 12) and so on.
well identity doesnt change the matrix, does it? xD
what happens in a) if A is identity, for instance?
I meant, is a) true or false if A is the identity matrix?
You can guess, and if you can back up your guess with an argument, even better!
all good, rest well 🙂

the top is an answer to the bottom
but idk where it gets the middle column
I got that eigenvector as [0 0 0]
meaning its not an eigenvector so that respective eigenvalue is undefined right
I got the left and right colum find tho
means you made a mistake
😮
ok i know I didnt make a mistake in matrix manipulation cus I used a calculator to double check
manipulation
I got an eigenvalue of -3
and when I apply that to the original matrix I get [4 0 2]. [0 2 2], [2 -2 3] right
1 - (-3) = 4, -1 - (-3) = 2, 0 - (-3) = 3
and that reduced to echelon form is the identity matrix
it can't be the identity matrix
maybe
gonna use an eigenvalue calc to double check
nope that gives me -3 too
i feel like im doing algebra wrong somewhere lol
i forgive you
cant copy down a negative sign to save my life
Hint(s) for the converse of prop 16.3.1 at the botttom?
I tried using the chain rule to find what the derivative of f at a point a might be, but that didnt work. I suspect I could use one of the coordinate maps in terms of the dual basis, but I havent figured how yet. I just need to guess what the map is, showing it satisfies the def. of the derivative at a point a should be fine.

The implication follows from the chain rule, but the converse is >.<
so a linear transformation is only a function if its kernel consists of only the zero vector

no
damn it
the map that sends everything to 0 is linear
it's only injective (i.e. one-to-one) iff its kernel is {0}

I'm confused what this means
why is it not a function if it's one-to-one?
um
isn't a linear transformation always a function??
it's only injective if the kernel is only the zero vector
injective != function
Kaisheng have mercy on me, I got lost after we started moving to column and row spaces LOL idk what half of this means 😭
or I do but like I don't remember
why is injective != function?
isn't a function a rule that gives a unique output for every input?
injective is one to one, so unique output for every input
...right? 😔
a function is just a thing that gives only one output for every input
the thing that takes everything to 1 is a function, but it's not gonna be injective
thing that takes everything to 1?
so f(x) = 1
is a function
but it's not injective
yes
Wrong, it is injective iff the domain is either the empty set or a singleton
yeah that's what I meant mb
damn every word matters 😭
yes every word matters, but it's good if that's what you meant
the 0 space has only 1 element
i think it's important to pay attention to detail tbh
You're right
if you have two inverse matrixes A^-1 B^-1
and it asks you to find (AB)^-1
do you just multiply em together?
There are two ways to multiply them together
Do you know what the inverse of a matrix means?
still pretty new to this honestly
if M is an invertible matrix, then M^-1=N is the (unique) matrix such that MN = NM = I
where I is an identity matrix
yea that makes sense
but if you have two inverses that dont relate and asked to find (AB)^-1
i dont see how you could do it without finding A and B first
there happens to be a simple way
you need to find M such that (AB) M = M (AB)= I
Agree?
if you find such M, then M = (AB)^-1 by definition of inverse
Ok i see where you're getting at
a property that you probably either proved or was told
is associativity
so in particular if M = B^-1 S for some S, then (AB) M = (AB)(B^-1 S) = A(BB^-1)S = AIS = AS
maybe this hint gives you any idea what S can be for it to work
Does anyone happen to know what this Notation means
v1 || v2 with respect to vectors
does this mean parallel ?
The inverse of a matrix is a matrix in which you multiply your non-inverse with to get the identity matrix
Hi, all! 
Can somebody explain how to calculate the implicit form of a vector to me?
There is no such thing
Maybe you know it as reduced?
I know the norm of a vector
Maybe its that
Well don’t you have a defined problem? It should say the correct word then
Maybe its the form of a line?
I translated it roughly
That’s the problem 😄
🧐

Implicit equation =/= implicit vector which doesn’t exist as a thing
y + x + 5 = 0 is an implicite equation
Sounds like someone hasn’t read the rules
Also wrong channel 
I.e. someone hasn’t read the pins
Me?
This is linear algebra tho
for part A guys, can someone word this out for me? I'm struggling to understand what the given solution is saying, why is B_1(x, y)= (x_1, ..., x_n) [B_1](y_1, .., y_n) ? (after it says "Then")


im so dumbn vm
if a matrix has 3 distinct eiganvalues must it have 3 independant eiganvectors?
nah not you. someone asking to pay for help on a high school algebra question
if a matrix has 3 eiganvalues, and one is a double root, must it have 2 independant eiganvectors?

or how do i approach this without doing it the long way
or do i have to actually solve it all to figure out
hm so geometric multiplicity is bounded by algebraic multiplicity. So that means there might be only one linearly independent eigenvector corresponding to 4. But there could also be two, so i think you have to check manually unless im forgetting something
i think there must be a shortcut because theres a lot of these problems
im in engineering math and we are touching on linear alegbra
its either 2 or 3. I don't think you can say definitively whether its one or the other without computing the null space of A-4I
ok and my first question
if theres 3 distinct eiganvalues
is there 3 linearly independent eiganvectors?
i would think yes

(A x)^T = x^T A^T
you can either expand the product as a sum or as a vector of dot products and convince yourself they're equal

i have two formulas
y = y_hat + z
z = y - y_hat

like that
aren't I suppose to do [1, 1, -2] - my y_hat vector
or is it [0, -1, 2] - my y_hat vector
x-yhat
you can then double check if that is perpendicular to y
it probably won't be, but you can do a second step of gram schmidt at that point
we haven't learned gram schmidt
xD
but ty

for this problem, I chose the vector [0, -3,1]
b/c when you take the dot product of the two, you get 0
would that work?
sure
thanks @lavish jewel
If there are 3 eigenvalues, there are 3 or more eigenvectors. But what is sure is that for each eigenvalue you will have at least one eigenvector and eigenvectors associated to different eigenvalues are linearly independent.
For example, for a zero 4x4 matrix you will have only one eigenvalue which is zero, but there will be 4 linearly independent eigenvectors (any vector here is an eigenvector)
In general if you have a homothety you will have only one eigenvalue and "n" eigenvectors, where "n" is the dimension of your square matrix (for instance, the identity matrix has an only eigenvalue 1).
If you want to have three eigenvalues but more eigenvectors then, for example, take an identity matrix (m x m) and "boost" it to a diagonal matrix ((m + 2) x (m + 2))
Something like this

You have three eigenvalues but 5 linearly independent eigenvectors
Hey guys, what would you do if you dont understand anything on what to do even when watching youtube videos and so on this subject?

Im not asking to solve the questions for me, just on how you would act if you would be in my case
look up key words, read your textbook, read your own notes, read your lecturer's notes etc
A good exercise is to reduce the not understanding of the subject to a specific question that you can pose.
that too
Like "on the one hand, if I proceed like this, I would get such result" but it doesn't match with this exercise/reasoning/theorem...
As Robert Sheckley said, "In order to ask a question you must already know most of the answer"
You can try to solve an exercise in many ways, even if some of them are not rational and long, to make sure you understand
I think what Im doing is to find a similar task on someones youtube video or in textbooks but all I find are definitions. So in your opinion I should learn the definitions first and practise those for a long period of time before i start solving the problem right?
It is enough to understand the definition (at least think like you have understood them), look up some examples...
But the problems you sent are typical, you can surely find YouTube videos on such problems
in f), one way to solve this is realizing (0, sqrt2, 1) and (sqrt3, sqrt5, 0) is in w_6, but how do they get to that?

Yeah maybe Ive to spend more time and listen more carefully. Thank you and also @dusky epoch
Do that
i dont have permission to write in there
Do you not have access now?
does anyone know whats the relation between the rank of a nxn matrix over a field F to its Jordan canonical form?

to help give a little bit of context
I have an intuitive feeling its linked with nullity and the image but im not sure where to go from there
Null space is the same thing as the eigenspace associated to the eigenvalue 0
is there any form of transformation that can take a shape transform it into a line, and the length of the line segment has the maginitude of the area of the shape tranformed
if yes, can it be extended to n-dimensions i.e., take a n-dimension cube and tranform into a line segment whose length is magnitude of the volume of the n-cube
Linear transformation, and arbitrary shapes?
*cubes, pardon me
Are the cubes rotated or are the always perpendicular to the axes?
Wait no won't matter
Answer will be no because if you double the size of the cube, the volume becomes 8x but since the transformation is linear, the length of the line segment will be doubled
So won't work if 2 dimensional or higher
Thanks for the reply. Kinda off topic, but is there any non-linear transformation?
Seems like much harder problem that might involve measure theory, I can't think of anything immediately

try equating one of the variables as zero and see how you can solve the equation with the two variables
HINT: the vector normal to the plane, gets completely reflected by such transformation. So if n is normal to this plane then r(n) = -n
Any 2 (non-colinear) vectors that belong to the plane do not get reflected. So if v1 and v2 are two such vectors r(v1)=v1 and r(v2)=v2
Now which the assumption that v1 and v2 are non-colinear, the normal vector n together with v1 and v2 span the whole of R^3, and so they form the required basis
you know of any good videos i can reference? I didn't understand it very well 
Sorry, I'm looking at my teacher's notes and I literally cannot read them
I have a subspace of R^3 such that x = y = 0, how can I find its basis?
what form do the elements of your subspace take?
this is what I have
right so all vectors in your subspace are of the form (0,0,z), can you find a vector that spans it?
hmm (0,0,1)?
yes
that is the basis?
yep
so and since theres only 1 vector in the basis then the dimension of C is 1 right?
Jordan canonical form tells you $A = P(S + N)P^{-1}$, where P is invertible, S is diagonalizable, N is nilpotent, and S and N commute. Since they commute, you can say something about their eigenspaces.
Apopheniac


Given the matrix A find an orthogonal matrix S and a diagonal matrix D such that the equation is satisfied.
Could someone give me a pointer on how to approach this?
find the eigenvalues and eigenvectors
is the range and kernel of a matrix always an invariant subspace of said matrix?
Range(T) is clearly T-invariant
Same for Ker(T)(since Tx will just be 0 in that case)
im doing this exercise and it seems a bit too .. trivial

Range(T) and Ker(T) are usually not independent spaces,tho
See operator associated with $\begin{pmatrix}
0& 1\
0& 0\end{pmatrix}$ T(0,1)=(1,0) is in range while it's also in Ker(T)
Buncho Drunk

Well,In this case they might be
hmmm the xor is forcing me to dfind 2 independant subspaces?
Prove that,if so

thanks star eyes

Dot product is linear
Dot product is bilinear (for R^n) so it would be true
Ok so like
Talking about orthogonal projections and stuff
Say v is in some vector space V and u is in some subspace of V, call it W such that v - u is in the orthogonal complement of W
then we say the distance between v and W is ||v - u||
how does this make any sense
how can we have distance between a vector and a whole subspace
lemme read over this again
hm
I guess that kinda makes sense
and like the proof that such vectors exist with a minimal distance logically makes sense to me
it's strange to me, measuring distance between two seperate objects
*-*


sounds right
aight, so I've been working on this linear algebra homework for about 8 hours now. Anyone willing to get paid to tutor me? DM pls
OR... just post the question and you can get help for free
there's like 10 problems though :((
ok so post one...

do you know if ${v_1,v_2,v_3}$ is an indep. set?
moshill1

I'm not even sure myself. My teacher literally just said v_1 and v_2 can be anything

like this is literally his handwriting
and I can't read his examples smh
I've just been confused this entire time
wow that's some garbage handwriting
I've literally been lost because I can't read it smh
i also can't read that....
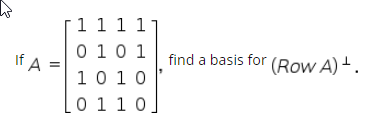
Dumb question but how do I solve for a basis for the null space

for this system of linear equations
RREF [A|0]
But how does this work with complex values
same way, just with arithmetic of complex numbers

A linearly dependent set cannot be orthgonal
is this true or false?
can I claim it is false, since I can use a set that contains 0 vector?
I'm confused to be honest, initially the professor said the statement is false
Then he used the contrapositive method and say the statement is true
contrapositive as in:
we know that: an orthogonal set is independent set
the contrapositive term is: a dependent set cannot be orthogonal
Orthogonal set is independent is false
Consider {(0,0),(1,0)}
If all the vectors in the orthogonal set are nonzero,it is true
an orthogonal set not containing the 0 vector is linearly indepenedent
yes
therefore A linearly dependent set cannot be orthgonal
is false
as it can be orthgonal, right?
Yes
Thank you so much...let me argue the case with my professor...
got my reply..
Answer true.
Theorem: ON set implies Indep (statement A implies B)
The contrpositive of this theorem can be stated as follows: (not B implies not A)
So Not Linearly indep implies Not Orthogonal
Give this counterexample to that Theorem
I gave him that as well
"ON set is only defined for non zero vectors"
so he assumes that the ON set is already nonzero vectorsa
and he just used the contrapositive method
I'm so confused, he doesnt make sense
hold on, let me check his notes
did he say orthogonal or orthonormal

they did say nonzero tho
he didn't explicitly state orthogonal = nonzero
he just state orhtogonal set in the question without specifiying it contains nonzero
orthogonal set of nonzero vectors
Check defn of orthogonal

nowhere did it explicitly mention orhtogonal automatically does not contain the zero vector.. right?
Yea,It doesn't
what was the original question? lin dep sets cannot be orthogonal?
and you say it's false cuz you can include the 0 vec?
A linearly dependent set cannot be orthgonal
yeah, you'd have to cherry pick the 0 vector in one of the two definitions
the answer is false, isn't it?
unless they explicitly exclude the 0 vec, yeah
the theorem you put above does exclude it, idk if that's from the same course
the theorem expliclity mention that it does not contain 0 vector
an orthogonal set not containg zero vector
but it does not imply explicitly ortghonal set = does not include zero vector
~
Zero vector always warrant special consideration.
If every statement have to include exclusion theorems will be v complicated.
"
yeah, as i said, you'd have to construct a definition carefully
Anyone has an hint how to prove/disprove whether the set of 4x4 permutation matrices generate the space of all 4x4 matrices? Pls just hint, i have no idea what to do
generates through linear combinations?
yea
over R?
well the first counterexample i thought of is over C
hm wait
no my argument works for R as well
let me think of a good way to phrase it
okay how about this
note that the column sum of a column of a permutation matrix is 1
so linear combinations of permutation matrices must satisfy having all columns have the same sum (why?)
but clearly there are 4x4 matrices that dont satisfy that
oh nice
the matrix with a single 1 and everything else 0, for example
does that make sense? can you see how to prove the (why?) part?
[rows instead of columns would work as well of course]
yea every sum of a column of a a multiple of a perm matrix will be some number a, and if you sum several of those will be a+etc
so cant generate all
this doesnt seem to work for fields of characteristic non 0 tho
im not even sure the statement is false in general
shouldn't be that hard tho i think
cuz every sum of column will be the same mod char F?
sure but i dont think that helps you
wait
that doesnt help for infinite fields of char p > 0 does it?
unless theres something you can do im missing
lol after further prompting.. he indirectly admitted his mistake by threatening me
What about this, M matrix that has 1 in (1,1) and 0 everywhere else. then sum of first column is 1, but sum of other columns is 0. And 1 never equal to 0 in a field
if we had linear combo $M = \sum a_nP_n$ then $\sum a_n = 1 = 0$ in $F$ since column sums all the same, right?
i'm kinda paranoid that i m wrong somewhere tho lol but seems right to me
Carla_

anyone have good source for learning linear algebra 2 (mainly for transformations / transformations matrix ) etc'
@wiz when the professor is sus!
If you're looking for books, Linear Algebra and Its Applications by Lay has some stuff. You can browse other standard references on the subject.

AB and BA have the same eigenvalues
so there's no such example?

thats nxn though, works for mxn?
so is there an example?

Mathematics Stack Exchange
As a part of an exercise I have to prove the following:
Let $A$ be an $(n \times m)$ matrix. Let $A^T$ be the transposed matrix of $A$. Then $AA^T$ is an $(n \times n)$ matrix and $A^TA$ is an $(m \
The first answer is very nice
That works for nxn case too
ah thanks
Scalar multiplication is defined as $\mathbf{F} \times V \stackrel{\cdot}\longrightarrow V$, right? Where V is a set, and F is a field.
n/c

Well,V has to be an abelian group
Can you tell me the full structure of a vector space over F?
It's a set (V, +, *, 0, i)
I meant to say vector space
You know group actions?
No
Ok,nvm
lol
okay I was thinking what's the third haha
Can you list the structure of it out for me?
Like in parentheses how you would list an algebraic structure?
I have no experience with that
I guess you want something like:
"V is an abelian group wrt +"
i.e., There's an identity 0 and an inverse for every element in V(wrt +) and the operation is associative and distributive
I meant like I listed them above
Yes exactly but is there anything else?
No, That's it
Okay

Ehhh
Why is it using those icons?
For the direct sum and I don't know the other one
you can use whatever you want as symbols as long as you define them
it's to make clear that addition of vectors is not the same as addition of scalars, and similarly with multiplication
the field comes with its own operations that need not match those of the vectors, but the linearity properties must hold
it's not denoting a direct sum there
If I want to prove that a vector space V is associative, can I do something like this? $(v +_v w) +_v u = ((v_1 +_F w_1) +_F u_1, \dots, (v_n +_F w_n) +_F u_n) = (v_1 +_F (w_1 +_F u_1), \dots, v_n +_F (w_n +_F u_n)) = v +_v (w_1 +_F u_1, \dots, w_n +_F u_n) = v +_v (w +_v u)$
n/c

What's +_F?
Where +_v is addition on V, and +_F is addition on a field F
Is this a finite dimensional vector space?
Yes
Yea that works
How would you do it if it wasn't finite dimensional?
I meant to say that if you wanted to prove that it is associative
To show that it is a vector space
Among other things
Just write out a+(b+c) and (a+b)+c and show they are same,given the operation +
Yes but that's what I did
- here is defined to be component wise addition,so it works(well that works in infinite dimensional cases too,assuming you can write an element in V as an element in K^inf)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
both v and w lie on the plane.
because we're looking at what vectors can be generated by av + bw
which is the plane containing those vectors
u is not on the plane here, meaning it cant be generated by av + bw
hence is linearly independent of them
so for something to be linearly independent, it cannot be made by adding the other two vectors?
in the 3-dimensional case, yes
adding scalar multiples of the other vectors, that is
to be more precise, we say a vector $u$ is \textbf{linearly indepedent of} a set of vectors ${v_1, v_2, \dots, v_n}$ if[
u \neq \lambda_1 v_1 + \lambda_2 v_2 + \dots + \lambda_n v_n
] for ANY choice of scalars $\lambda_1, \lambda_2, \dots, \lambda_n$
Namington

this is equivalent to saying the set ${v_1, v_2, \dots, v_n, u}$ is linearly independent, i.e. if [
0 = \lambda_1 v_1 + \lambda_2 v_2 + \dots + \lambda_{n} v_n + \lambda_{n+1}u]
then all scalars are $0$, that is: [\lambda_1 = \lambda_2 = \dots = \lambda_{n} = \lambda_{n+1} = 0]
Namington

[to prove the equivalence, solve for lambda_(n+1)u and note that, if we assume lambda_n+1 is not 0, we can divide both sides by it]
[but we cant if lambda_n+1 = 0]
[also one direction of the equivalence implicitly relies on {v_1, v_2, ... v_n} being itself linearly independent, blahblahblah technical details]
there's basically none except the 3blue1brown one
and khan

honestly dont understand this
can someone explain this

why is his solution 5, 2
why isnt it 3,2
3(2) = 4 + -1(1) = 4 - 1 = 3
-1(-2) = 2 + 2 (0) = 2
so wouldnt it be 3,2
o
im stupid lol
Okay, now I understand it. So to get transformed v, we would need to know the transformed i and j. From the transformed i and j vectors we can simply multiply the original i times the new i vector plus the original j multiplied by the new j vector.
If $k$ is some scalar and $\vb{v}$ is some vector, then the scalar multiplication is $k \vb{v} = k \langle x, y \rangle = \langle kx, ky \rangle $.
zslya

how do we find out what the new i hat and j hat coordinates are going to be, post translation?
determine where the translation maps (1 0) and (0 1)
I guess a better question would be, how do I determine i-hat and j-hat given the vector(randomNum, randomNum)
where randomNum is any number within a set range
If $\vb{v}$ belongs to $R^2$, $\vb{v} = \langle v_1, v_2 \rangle = v_1 \langle 1, 0 \rangle + v_2 \langle 0, 1 \rangle = v_1i + v_2j$
zslya

well reading what theyre doing
i-hat and j-hat may not be unit vectors
but regardless, theres a unique way to write v as a linear combination of i-hat and j-hat
zslya, sorry but idk how to read that lol
i mean, let's say i drew on a piece of grid paper a random vector at 3,2 where x = 3, and y = 2
take any two linearly independent vectors
done
the most common choice is the so-called "standard basis" consisting of (1 0) and (0 1)
and then (3 2) = 3(1 0) + 2(0 1)
that would just give me my original vector of 3,2
but i guess im more wondering like
{kind=link}

so in this photo i posted
he isd saying that the transformed i is 1,-2
how did he get that?
apply the transformation to i-hat
what transformation
whatever transformation you're doing.
which video is this?
Quite possibly the most important idea for understanding linear algebra.
Help fund future projects: https://www.patreon.com/3blue1brown
An equally valuable form of support is to simply share some of the videos.
Home page: https://www.3blue1brown.com
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through P...
this one
and at what time
seems he did $\begin{pmatrix}x\y\end{pmatrix} \mapsto \begin{pmatrix}x+3y\-2x\end{pmatrix}$
unless im misreading
Uh, i think you just need to pay attention to the video properly. The person in the video seems to explain it very well...
Namington

They also tell you how we got the i hat and j hat.
That is ok, but pay attention to what he is saying slowly, and carefully.
i dont think the fine details of the transformation matter to what he's trying to explain
Start from 3:40 again, i suggest.
he's just trying to demonstrate how you can determine the effects of a transformation just by looking at what it does to a basis
(i.e. just by looking at how i-hat and j-hat change)
well, you might not know that information
maybe that was intentionally left out
you might be given
Yes it was given at 3:53
"we have a transformation that maps (1 0) to (1 -2) and (0 1) to (3 0)"
Please watch 3:53 onwards.
you dont have an explicit formula for that transformation
but you can still determine what it does
since you know what it does to a basis
(if you wanted to, you could FIND a formula for it, which i did above)
(but thats unnecessary)
i think you missed the point of a segment: the point is that the ONLY thing we need to know to know EVERYTHING a linear transformation does, is what it does to its basis
he tells you no information about the transformation OTHER THAN where i-hat and j-hat end up
but that's enough to calculate where v ends up
yeah
i mean i got that
i just was trying to understand more deeply
on how i can use this practically
again, if you want an explicit formula for the transformation, it's given by $\begin{pmatrix}x\y\end{pmatrix} \mapsto \begin{pmatrix}x+3y\-2x\end{pmatrix}$
Namington

What the person in video is trying to explain to you is that that vector he took as an example, we were able to write it as a linear combination of another two vectors.
and i determined that purely from where he said i-hat and j-hat ended up
yes
yeah
And make sure you understand this carefully. This is one of the most important concepts in linear algebra.
from a practical perspective, this justifies the existence of coordinate systems.
but if u dont know what i and j hat are...
what i mean is
if u dont know the values
We will always know what i and j hat are
If we are in r2, one of the choices is always (1, 0), (0, 1)
similarly, in r3, (1, 0, 0), (0, 1, 0), (0, 0, 1)
so going on that formula though, adding them together would give us the translation, from where we were, to where we will be
so if we subtract, would that give us our orgiinal vector?
like if we start with the end translation from our translation
and then subtract that, would we get what we had, pre-transformation
Can you clarify what this line means?
well the formula he gave was basically multiplying the original i and j by the intended i and j offset, and then adding them together to get a new vector
what would happen if instead of adding, we swap the original values to the new ones
and subtract
he wasnt multiplying the original i and j
instead of add
he was replacing them with the transformed i and j
like
we have v = ai + bj
applying the transformation T
T(v) = T(ai + bj)
but T is linear, which means:
T(v) = T(ai + bj) = T(ai) + T(bj) = aT(i) + bT(j)
so if we have v = ai + bj, to determine T(v), we just replace i with T(i) and j with T(j)
i.e. to determine "where v ends up" after the transformation T, we replace i and j with their transformed versions
now it seems youre asking if theres a way to undo this process; there isnt ALWAYS, but there often is
the problem is that some transformations map multiple vectors to the same point
for example, if your transformation "compresses" the entire plane into a line
like, say (x y) gets mapped to (x 0)
then the vectors (6 1) and (6 3) both get mapped to (6 0)
and so if i tell you
"we have (6 0), find the original vector"
you wouldnt be able to answer
since (6 1) would work, or (6 3), or (6 -34091), or (6 7pi/41)
or anything else
you could find SOME vector that maps to (6 0), but not a unique one
so some linear transformations CANT be "undone" unambiguously
some can be though - we call those "invertible"
working with invertibility of transformations and matrices becomes a theme of linear algebra eventually
so i'd wait till later in the course to explore that in detail.
Since you are watching that video, I would just suggest you draw it out yourself as well, and follow along that video. I think it explains it nicely, and then you can come over here and ask more if you need to.
ok so
from what i understand
theres basically no way of knowing where i hat and j hat will land, given an arbitrary vector
If I asked someone to answer the following question:
Tell me where i-hat and j-hat will land, given the vector v = (3,9)
it's impossible to know
Am I smoothbraining this: If A is real nxn and I+A is invertible, A and (I+A)^(-1) commute. Im blanking on how to show that
(3, 9) = 3 (1, 0) + 9(0, 1)
i dont think they mean the coefficient
i think theyre asking you where i-hat, j-hat will end up upon applying a transformation
which of course theres no way to determine
If C = (I + A) and AC=CA. Multiply right by A^-1 then left by A^-1
since you know nothing about the transformation
oh
from just that info
doesnt that assume A is invertible
this is what i have been getting at for the last 10 mins lol
ok so its not possible to know what i-hat and j-hat vectors are, given a random vector and no other information
if i gave u v1(1,2) there's no way to know what j-hat vector and i-hat vectors would be
oh wait i just do that with C not A rightright
I need to express x and y in fonction of v and y. I’ve been at it for half an hour now, can someone help?

try multivar calc
Im not familiar with that
i mean the channel, #multivariable-calculus
oh ok
I have a question asking me to find the p(A) for a given matrix and the polynomial p(x)= x^2 -3x +2
im not sure how to approach this problem
im not able to wrap my head around why the unit vectors of i, j and k are (1,0,-1), (1,1,0), and (1,0,1)
like
what does that even mean
i understood it when it was 2d
they arent
i was (1, 0) because we don't move anything on the y axis, and j was (0,1) becuse we only move up on y once
the canonical basis vectors for R3 are (1,0,0),(0,1,0) and (0,0,1)
what does canonical mean
oh
ok that makes sense then...
can u explain why this guy in this video
explained it differently

What do 3d linear transformations look like?
Help fund future projects: https://www.patreon.com/3blue1brown
An equally valuable form of support is to simply share some of the videos.
Home page: https://www.3blue1brown.com/
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through Patreon, where supporters ge...
at this timestamp
maybe im misunderstanding
what do u mean by map
apply a transformation to the basis vectors and you get those vectors
$T[\hat{i}]=[1,0,-1]$
and these are the basis vectors
moshill1

yes
so under the transformation T, [1,0,0] maps to [1,0,-1]
how do you found T: R3->R3 if

define find T
so like, how did we turn 1,0,0 into 1,0,-1?
T(x,y,z) = ...
applied the transformation
which transformation
the transformation
the one 3b1b had in the video
so find the matrix representation..?
he does, I just watched the animation
@nocturne jewel i know that
