#linear-algebra
2 messages · Page 194 of 1
not that rgb is uncorrelated with height and width
but rather how rgb varies w.r.t. itself as the other 2 values changes
(assuming you care about rgb space. other matrix shapes can have different ranks.)
oh ok..I think I understand clearer now, like what matters is the linear combination of 1 feature (i.e. height, width, rgb) to itself at a point. So what happens if it is a linear combination of it?
I know we learnt in linear algebra that it means it is not linearly independent, but am not sure how it relates to image similarity and collinearity haha..
oh ok..I think I have enough to work with, learnt lots today from you, thank you for your time and help.
I'll look into the different distances like Euclidean distance, Cosine distance, etc and figure out the best one to use.
cool cool, yeh lucky there's like youtube tutorials around and stuff haha. But yeh will check those out, and yeh thanks heaps for your help.
aight
A^TA would be n x n matrix
https://math.stackexchange.com/questions/3573576/given-an-n-times-m-matrix-a-prove-that-colata-colat for first one

Mathematics Stack Exchange
We're studying Least-Squares in my linear algebra class; one of the theorems we've proven is that $Nul(A^TA)=Nul(A)$.
I understood that proof well-enough, however our professor also stated that $C...
what is P_3, set of polyomials of degree up to 3?
yep
yes then one-to-one is equivalent to being onto
your link says something different than the Q
i mean dim P_3 = 4 and dim R^4 = 4
it was for question with col spaces
right but it has col(A^T) on the RHS
if dim E = dim F, then any onto linear transfo between E and F is one-to-one
col(A^T A) might equal col(A^T)
yes which shows that your statement was false
oh ok
uh ?
they had statement Col(A^TA)=Col(A)

welll
dim V = dim null S + dim ran S
and dim V >= dim ran S since S is onto
moreover, dim ran S = dim W in that case
thus you get dim V >= dim W
@wind pasture can you see how to complete this argument?
How can I calculate the 3d collision of two spheres and whether or not they are intersecting?
uh dimW >= dim ran T
yes, and since T is onto, dim ran T is?
dim V?
yep
dimV = dimW = isomorphic?
yes, any two finite-dimensional spaces with the same dimension are isomorphic
great thanks
yw
you can prove that by constructing the isomorphism by sending each element of one basis to the other
what do you know about the spheres ?
@lilac stratus absolutely nothing.
😄
i mean i know like
they have a radius
lmao
bijektively
Ok so you have radius and centers, right ?
||is that coincidence that your name contains russian vulgarism, shika  ||
||
Uh, I don't know how to calculate it. I just know they exist. @lilac stratus
how do you went to calculate the intersection of two spheres if you only know they exist but not where 
||no, initially that was a private joke with a friend, and then that lasted and here I am 2 years later with the same nick||
(i'm probably misunderstanding the question  )
)
uh
Hint: point is on intersection of two curves/surfaces iff it satisfies equations of both these curves/surfaces
so like, you know how in games, there are spheres over different areas, and when a player overlaps with the sphere it causes something to happen
i essentially want to calculate whether or not something overlaps something else in 3d space
You can't speak about sphere equation if you don't have the radius/the center of the spheres, though, can you ?
Well that's why I am confused lol
Does that make sense
Well yes, but you need informations on that something to do so
idk how to help with that honestly
If you're programming, and the sphere is a data structure like this:
struct Sphere {
radius: real
center: 3DPoint
}
then yes, you can compute the intersection of two spheres
Well yeah
but i think thats irrelevant to the formula isn't it?
the formula would be the same for each and every single situation where you have to do this
i would assume at least
is it for sure 2 spheres?
it is irrelevant, indeed, but I was kinda confused cause you told me you had no information on the spheres
or generally 2 geometric objects
but you actually have the radius and the center
But like, if you have two spheres S1 and S2 the first one being of radius r1 with a center (x1, y1, z1) and the second one with a radius r2 and a center (x2, y2, z2), then the points of S1 are the points (x, y, z) satisfying the equation:
(x - x1)² + (y-y1)² + (z-z1)² = r1²
and the points of S2 are the points satisfying the equation
(x - x2)² + (y - y2)² + (z-z2)² = r2².
You're looking for points satisfying both equations
oh i'm more trying to learn 3d math
for games
stuff like dot product, cross product, intersections of collision, etc
i've been interviewing with some major game s tudios and realized i don't know enough about 3d math.
I know a lot about programming in general though.
Which is kind of interesting when you think about it lol.
Well, I'm not sure dot product or cross product is relevant here, I'm fairly sure the best way to compute it programming-wise is really to solve equations (not necessarily the ones I've given tho)
Yeah I know it's not relevant here. I was just saying those are vector math concepts which I've found to be very common on interviews lol.
Honestly, I assume calculating intersecting circles is very similar to intersecting spheres but probably an added term or something
yeah
oh, yeah they are, since this kind of linear algebra is used a lot in 3D programming
Actually, if you want to learn this stuff
I'd recommend you to try doing like a small ray-tracer
if you're a programmer that's probably one of the best way of learning about it (and a funny one)
Where could I read up on that?
2secs
https://www.realtimerendering.com/raytracing/Ray Tracing in a Weekend.pdf is really really good
o good lord thats a lot of reading XD
there's a lot of code too
and you get funny results quite fast
(like after reading ten pages you already have some code you can play around with)
Now here's a interesting question I have seen: "Given thousands of spheres inside of a cube, that are floating/moving... how can you optimize collision checks"
Also, although it does not only speak about raytracing, this website is nice https://www.scratchapixel.com/index.php?redirect
Now I assume this question requires me to have a deep understanding of why the collision works
soo that i could potentially, remove terms or something
so it's less calculations
honestly though, i can't imagine collision checks to be very expensive...
that's one of the most expensive part (in computing time) of the 3D maths
really
a good method would be something AABB inspired
I'm only know a little bit of 3D programming, so there may be a lot better, but AABB would be decent, I think
probably adapted for spheres, like not just looking for intersections of the bounding box but also trying to vaguely guess when the bounding box intersects but not the actual underlying spheres
(not sure how one would do that though)
i gotta figure out like
in which order to learn stuff lol
i have so much stuff i want to learn
and very little time
during the day tbh
i have to work from 7 to 3 pm every day
so its hard to figure out how to prioritize this stuff
I'd recommend you to like, just code, and learn the maths while doing it
that actually works quite well, if you already know some very basic linear algebra
Honestly, what's embarassing is that the last math course I took was basically algebra 2 lol
i never took calculus
spheres usually is hard to compute though i'd typically approximate it using a square or something XD
😭
and if you don't, start with the first chapters of scratchapixel (the website I linked earlier), and then, well.. code (a small raytracer, or even just some rotating cube using an already existing graphic library)

hey, got a linear algebra question in #help-0 about iteratively solving linear systems with elements on the diagonal of A that aren't all non-zero if any of you think you can help
like these chapters @wicked lion
I used to spend a lot of time programming, and 3D programming was something I wanted to learn, so I've spent a lot of time looking for learning resources
It was kinda fun, a few days ago I wanted to restart doing some 3D programming related stuff so I coded a small 3D ascii renderer lol (really small, like only 200 lines)
anyways 

sounds like fun
im not very confident in my math skills honestly
my education in mathematics has been godly awful
Well, I kinda dropped out in like 8th grade, and didn't restart actually going to school since then, so I'd say my education wasn't great either lol. Luckily, internet is full of nice resources to learn by yourself 
whats that mean lol
Anyone good with vectors, i can pay
A^x?
xA conserves since its char polynom preserves roots
what, like (a1^x a2^x a3^x)
like A^2 or A^5
it also conserves afaik
what's the square of a vector again
they prolly meant matrices
hmmmm

my bad
this is what im trying to solve exactly
i found the eigenvalues of A
now im trying to do part b
so i think A^2 will have the square of the eigenvalues of A, tbh
it'll conserve the same eigenvectors
but it'll scale by the eigenvalues twice?
i mean maybe the eigenvalues are just 1 and 0 and -1 or something neat
alright so for xA we have
let T be associated linear transformation
xT(v)=x\lambda v where lambda is eigenvalues for T
thus x\lambda v is eigenvalue of xT and thus of xA
and for A^x
yeah, as i said
so xA conserves?
but how would i solve part b?
not exactly conserves, but eigenvalues of xA are x times eigenvalues of A
actually i think i have a way of solving it
2, -3, -1
huh
can't i just say that eigenvalues are the diagonal entries
lol, only if it's a diagonal matrix
what are the actual eigenvalues
wait
i might be bad at linear algebra lemme check something rq
i think the condition is triangular matrix
yes i'm bad
you are right
ok but wait since it's diagonal you can basically just know the diagonals of A^5 and A^2
and so you can get the diagonal of B really easily
yeah exactly
ok that's how you're meant to do it
i added them and got a 0
lol
in the last row at least
i get the diagonal of B as ||(32, -243, -1) + (8, 18, 2) + (2, -3, -1)||
you mean 2 not 20 right
i got that too
how would i solve part c though?
if i show that A is or isn't diagonalizable, does that mean B is or isn't?
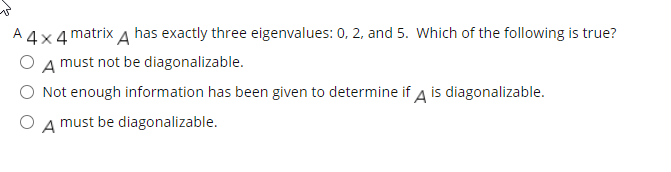
nvm, B is diagonalizable because its an nxn matrix with n distinct eigenvalues
Yeah but in this Case i guess B is diagonalizable exactly when A is because the Eigenvectors dont change just the eigenvalues
and if there is a base of eigenvectors of A there is also one for B
No
Nope x^3 +(-x^3) is not in the set
wait i just need to check what you mean cuz i study math not in english
0*(x³)
view matrices as arrays
it is
it's basically just saying that some entries are 0 and others are arbitrary
i think it means the i,j entry of A
yeah if you want i-j-1 to be divisible by 2 you just have the possiblity that one is 1 and the other is 0 so this is just the space of diagonal matrices
you can ignore that condition it doesn't really matter
Hello! I have a small question about this exercice, I have to find the value of alpha such that these two linear applications have the same reduced form (don't know what the term is in english but it's basically almost the diagonal form, so it's upper triangular with the eigenvalues on the diagonal and a 1 on the upper left). So when the discriminant of the characteristic polynomial is 0 or smaller than 0, we can find this reduced form. And my idea was to calculate the reduced forms of the two linear applications and separate among the case of delta=0 or delta<0 but it seems to be way too intense on the calculation and I asked myself if there is another way of solving this problem that is more efficient 🙂

its important because it tells you that A1,0 and A0,1 are always 0
ohhhh nice
Any subset of matrices where some entries are 0 and the others are arbitrary is a subspace
jup
so it doesn't really matter which ones are 0 and which aren't
so answer is yes i guess huh?
yes
what can I do here?
determinant
what do you mean determinant?
what does it mean by describe span{v_1,v_2,v_3} ?

you sure
i am little confused
-101a^2-210ab-34a-109b^2+442b determinant is this
ok so the determinant of a product of matrices is 0 iff at least one of the matrices' determinants is 0
so that's easier now probably
yeah
it's a lot easier since they're simple diagonal matrices
and simple numbers
why you assume X is matrix
A = product of these two matrices
X is presumably vector in F^3
so do det of A which should be zero
right, so at least one of those is 0
Man I feel so stupid... How do you prove that if W is a vector subspace of V with the same dimension then W = V?
finite dimensional?
anyway
just take basis for W and try to extend it to basis of V
Well, you can't I guess because they have the same dimension. Right?
if you consider adding nothing to it an extension then you can
any basis of W has the same length as basis of V thus spans V (by lin. independence)
and by definition it spans W
Wait, how does it span V?

Can you argue like this: if it doesn't span V then I could always add elements to the basis of W. But they have the same dimension so it must span V?
Wait, doesn't the proof you "posted" use the same argument as mine?
yes it kinda does
Okay! I guess it's valid then. Btw I like you pfp, Carla
thanks i like yours too
So for
can someone give an example where say $W_i, i \in I$ are subspace of $V$ and $W_i \cap W_j = 0$ pairwise but then $W_i \cap \sum_{j \in I\backslash {i}}W_j > 0$?
Anticipation

yeah
actually I can give you an idea on how to construct such an example
If you take two supplementary subspaces F and G
and H = Vect(f+g) for some nonzero f and g in F and G respectively
then F inter H = {0}, G inter H = {0} but F inter G+H = F + V = F
so like to give a concrete example
W1 = (0,1)R², W2 = (1,0)R², W3 = (1,1)R² and i would be 3 here
does that help @zealous junco ?
Anyone good with vectors, i can pay
(i'm actually not sure I understood the question right, since the notation saying that "a subspace being > 0" is kinda weird)
Take W_1=span{e_1} ,W_2=span{e_1+e_2}, W_3=span{e_1-e_2}
mb
didn't see someone answered already
(no prob)
count dimensions
if W and W^\perp were isomorphic, what could you say about their dimensions?
they are equal?
why wouldn't it be?
5 = dim(w) + dim(w perp) ?
yeah
yup
oh yeaa ops thanks
3 vectors in R^2 would work haha i was being dumb
how you order subspaces tho 
well you need to chose them carefully, to make sure that atleast 2 of the intersections are equals to {0}
did he speak about any order ?
its just an index set
0
oh proper subset
anyway does it make sense to say $\sum_{i \in I}W_i$ if I is not finite?
Anticipation

well how would u define infinite sum of vector spaces?
ok right
it may make sense in some topological context (not even sure), but it definitely doesn't make sense in the general case
like, $\sum_{n \in \bN}{\bR}$ wouldn't make anysense
Shika-Blyat

($\bR$ as a subspace of itself)
Shika-Blyat

So if I want to write V = direct sum of W_i but I can have infinite many W_i such that this holds
wym
like lets say V is infinite dimensional
then I could find infinite index I so that W_i nontrivial and direct sum of W_i is V
i think?
i don't see what prevents you from defining the sum of arbitrary many subspaces to be the subspace generated of the union of the subspaces
well assume we speaking abt P -- vector space of all polynomials
ye
then W_i = span(x^i)
well actually that would make sense
and P = sum W_i

i do not think so
well
yes, seems it is not really important finite or infinte dimension (and thus index set) is
Then ok i guess the infinite sum does make sense for subspaces
its just that if w in that summed subspace then w = lin combo of finitely many of vectors in W_i
like it would be if $w \in \sum_{i \in I}W_i$ then $w = \sum_{i \in I}w_i$ where almost all $w_i = 0$.
Anticipation

(sorry ig what I was saying was totally wrong )
 math is hard
math is hard
inb4 you learn all algebra is quotienting
^ lol
for part d) when showing the lhs is a subset of the rhs, is it ok to just say that linear combination of v1,v2,v3 is a subset of the complex field so there is no need to show anything

yea just say C^3 over C has dimension 3

you havent really show anything
what should i do
do you need to show d)? from the picture you sent?
yeah
You need to write those vectors in a 3x3 Matrix and do the Gauss algorithm if the rank of the Matrix is 3 your vectors are linear independent and every vector can be expressed by linear combination of them so the vectors are a base of C^3 @strange delta
well i mean if a) is true in your answer then so is d) if not then d is false
if your working in field of complex number
the mark scheme says this but it just assumed it had a solution and went ahead

it didn't assume anything, they showed it was invertible
guys. I need help about the logic of linear-algebra-multiplication.
We're just multiplying the matrices the way it's introduced.
But just memorizing.
I've seen some 3B1B videos.
have you learned what a dot product is and what it means?
I know dot product from physics.
all right. the definition of matrix multiplication is taking dot products between the rows of the matrix on the left and the columns of the matrix on the right
yeap. I also know that.
you can interpret it as a bunch of projections, then
but it's interpreted this way.
so is question is essentially just asking if theres a possible solution, not if the system system can satisfy everything in the complex field
can someone explain to me what the length of a vector is actually representing?
no. it is asking if there is a unique solution for any x
like, ifth e length of the 2d vector (9, 2) is 9
what does 9 mean?
and how is that different from distance
ah ok
im kind of stuck on the difference between length vs distance
i guess i was overthinking it
I would say length=norm
To be clear with language
and distance is a metric involving 2 vectors
So at least on a basic level
Norm is a function that needs only 1 vector
And distance requires 2
Norm = the "length" of a single vector
norm is a type of length
you represent the point by a vector that points from the origin to the point
a dot has no length
the length of that vector is the distance of the point to the origin
Yeah but it has a length to the origin
of your coordinate system
it's the identity element in your system
ok so
the length is
the distance between the starting point of ur coordinate system?
i dont get it still
let me give an example
Yes, but let's call that the norm to be clear
len(9, 2) = 9
so if we know the length of the vector 9,2 is 9
what is 9?
9 movements to the right, on the x axis?
if its that, then why?
why isnt 9 elements up on the y?
hmm?
the length of a vector is usually its euclidean distance to the origin
using the pythagorean theorem
you decided to make up a length that only takes the x coordinate
that's something different
not wrong, but if you made it up, you also have to check what properties it has
the traditional length of a vector [9,2] would be sqrt(9^2 + 2^2)
yea
in general though, you can make up any kind of "distance" that is a "metric"
but like in this case sqrt(9^2 + 2^2) does = 9
the interpretation of those, like the one you presented, is not necessarily straightforward nor meaningful
,w sqrt(9^2 + 2^2)

wolfram says you're wrong about that
probably just have my setup wrong then
in my code lol
probably an order of operations issue lol
ohhh wait
no i know why
my guess is you mixed ints with floats
its coz im using int
yep
well no
its all ints
so it will floor it
9.2 becomes 9
classic
but
in this case it's fine
it's just an example
and what i want to know is more just about
how can i use length, what is it, and how is it useful?
like
distance between vectors = USEFUL!
length of a vector = ?
like i dont see how getting the length of a vector is practically useful for anything
in the real world
I'm completely ignorant here on the use cases of it

the length of 0,0 is 0
the length of a vector can be used to represent speed without a direction, electric field intensity, radiated power intensity, force
mhm
you ever done trigonometry?
you'll have to review it
i bet
you're missing middle school level stuff here
ye
i've been afraid of math honestly
for a long time lol
not until recently did i decide i wanna try and get better xD
so its gonna be a steep learning curve probably
for a while
but uhm
let me make a video
of something real quick

@lavish jewel
@wicked lion the second point is the origin
as you say, the distance from any point to itself is always 0, there is no distance
but vectors are usually built from a "head" and a "tail" as "head-tail", and if nothing is specified, you can just place the tail at the origin and the head at the point, so you have those 2p oints
Consider the linear transformation $(\alpha_1,\alpha_2,\alpha_3,\dots)\mapsto\sum_{i=1}^\infty\alpha_i$
Whoever

Well why isn't it one?
Yes
So I think it's pretty clear that this is linear
And it's the sum is always finite since all but finitely many alpha are nonzero
No it's because it's a finite sum
you see, i'm coming at this from a very different background honestly. lol
but i think i get it now
the idea here would be like
yes
alright so i finally understand size i think lol
https://www.youtube.com/watch?v=lCtH7fYwn9c made a video, hopefully my understanding makes sense 😄
looks ok
How is $||1||^2=2\pi$ ?


could you define what these mean?
Timur

sure
i also do not understand where 2pi is coming from
$\Vert 1 \Vert_2^2 = 1$
Edd

I don't get this then
what's the context for your original thing
they probably mean the norm where you integrate a function's square on [0, 2pi]
norm on L^2[0, 2pi]
Yeah the context is in fourier series in [-pi, pi] -> R
1, cos(𝑥),sin(𝑥), cos(2𝑥),sin(2𝑥), . . . , cos( (𝑘 − 1)𝑥),sin( (𝑘 − 1)𝑥)
oh lol
so what's the problem? write out the norm
is orthogonal with this
what's the integral of 1 on [-pi, pi]
then you get this.
$\Vert 1 \Vert_2^2 = \int_{-\pi}^{\pi} 1^2 dx$
Edd

Hmm
??
$2\pi \neq 1$
Timur

the same thing in different norms can have different things
whatever you're reading is supposedly using the notation || ||_2 for the vector 2-norm, and || || for the function 2-norm
because the two spaces are completely different
one of them is of square integrable functions
Ohh
the other was some euclidean R^n space
Nice it is only written as a side note in the notes that were given out -.-

and this is still not what you had above
but in general, that'll depend on the choice of normalization for the period
Yeah the intervals differ (the last ss was from a different example)
Yep I get it now
aight
Could someone show me some references (written or video format) on dot product and how they work with the different left/right handed systems?
I know I could google one, but I'm worried about the information being incorrect (since I don't know the material, I won't be able to know whether or not it's valid info).
what is meant by "the different left/right handed systems"?
dot products dont care about orientation
maybe youre thinking of cross products?
Oh yeah
Left and Right handed coordinate systems

Discusses the differences between right handed and left handed coordinate systems. This is generally a matter of which way the z axis is pointing, but the difference in handedness can apply to any axis.
More useful in 3d stuff
If I have a space with differentiable functions $f: [0; \pi] \rightarrow \mathbb{R}$ with the $L^2$-inner product $\langle f,g \rangle=\int_0^\pi f(x)g(x)dx$.
Then for $f(x)=1$ the projection of f(x) along sin(x) and sin(3x) is

Does it look correct I just wanna confirm
Timur

forgot sin(x) and sin(3x) -.-
This is probably me being silly but how does the calculation for a1 work?

Apologies if this is the wrong channel haha
Ok so
If a cubic polynomial has roots $\alpha_1,\alpha_2,\alpha_3$, then the polynomial is $(x-\alpha_1)(x-\alpha_2)(x-\alpha_3)$ right?
Whoever

Yes
Now expand this
I understand that bit, it is just the calculation for a1, I don't really understand the summation thingies
Do you not know what that means or why a_1 is equal to the sum
Ok
I understand it when it is written like xy + xz + yz
But obviously I want to use this kind of language because it is better shorthand
So let's start out in general I guess
A sum $\sum_{i=a}^bf(i)$ is just defined to be $f(a)+f(a+1)+\cdots+f(b-1)+f(b)$
Whoever

$\sum_{k>j}^3$ is the same thing as $\sum_{k=j+1}^3$
Whoever

That makes sense
Alright
Yeah because it isn't bigger than or equal, alright yes that makes sense
Yeah
Exactly
So if the bottom part was k≥j then the sum will be from j to 3 instead of j+1 to 3
Ok so if you expand the sum out then you will get $\alpha_1\alpha_2+\alpha_1\alpha_3+\alpha_2\alpha_3$
Whoever

Whoever

In which case the sum is defined to be 0
It is defined to be 0 whenever the bottom limit is strictly greater than the top limit
It would just be that thingy you put above
And then sub in the already known values of a3 and a2
$\sum_{j=1}^3\sum_{k=j+1}^3\alpha_j\alpha_k=\sum_{k=2}^3\alpha_1\alpha_k+\sum_{k=3}^3\alpha_2\alpha_k+\sum_{k=4}^3\alpha_3\alpha_k$
Oh alright, and then the k = 4 one is 0
Yeah
So you are just left with the first two
I see my mistake now
Thank you for explaining this!
Whoever

Nice
Currently at A level and they aren't very rigorous, we were taught this but I just didn't understand it when using summation notation
Ah yeah it's really frustrating when people just use notations they haven't defined
Google, ask people like on this discord, or read more books
Yeah that is true
I always seem to pick books that are either too difficult to follow or ones that are a cake walk
Video lectures are a good source
Are you in the US?
Yes
It is kind of similar to there, we do trig approximations and binomials and basic differentiation and integration
I could send you a picture of the contents page of my maths syllabus if you want?
The A level course goes more into harder concepts but the language used it really vague
Huh I see
I mean maybe you should continue reading about calculus
Maybe also read number theory, linear algebra
Just realized your problem isn't linear algebra
Yeah I messed up with the channels and then realised after and kind of just tried to own it haha
For some reason my brain was like preliminary algebra
Also, now that you mention channels, we probably shouldn't be talking in here
My fault haha
no big deal
Thank you once again, now back to this book
can someone help me with this

why wouldnt the rank of A be 0? why is it 1?
nvm now that i look at it the null space is linearly dependent

Cool
Since the rank A is at most 3 therefore there exists the 3*3 “sub” matrix B of A such that the rest 4 rows of A can be linear generated by rows of B. Then rankA =rankB now dim N(A)=dim N(B)=2 therefore rankB =3-dim N(B)=1
I made it unnecessarily complicated... just that rankA is n=3 -dim N(A)=3-2=1😂😂
you need 9 degrees of freedom for all 3x3 matrices
what you found is for symmetric matrices
Not the. Basis are not unique except for dim 0 (and dim 1 over Z2)
looks ok then
It's true for all vector spaces
Jup its true for all K-Vectorspaces the Dimension theorem is Just your equation: dim(S+U)=dimS+dimU-dim(S∩U)
Hello. Is there an example of a vector space $V$ and subspaces $U_1$ and $U_2$ of $V$ such that $U_1 \times U_2$ is isomorphic to $U_1+U_2$ but $U_1+U_2$ is not a direct sum?
MathPhysics

no, that's not possible
since $dim(U_1 \times U_2) = dim(U_1) + dim(U_2)$ and $dim(U_1 + U_2) = dim(U_1) + dim(U_2) - dim(U_1 \cap U_2)$
Shika-Blyat

and being isomorphic <=> same dimension
so if they're isomorphic, then $dim(U_1 \cap U_2) = 0$
Shika-Blyat

Thanks. But, I did not assume that the vector space is finite-dimensional. Do these identities hold for infinite- dimensional case?
the identities does hold, but then i can't anymore deduce that $dim(U_1 \cap U_2) = 0$.
Shika-Blyat

In the infinite dimensional-case, U_1 x U_2 ~ U_1 + U_2 but U_1 cap U_2 != 0 is possible yeah
In that case you can and its not too hard, just take R^infinity and U_1, U_2 to be infinite dimensional overlapping subspaces
or like U_1 = R[X] and U_2 = R_n[X] for any n
Any two overlapping subspaces work?
I cannot see. Can you please elaborate?
So if you take $E = \bR[X]$, and like $U_1$ any infinite dimensional subspace of $E$
Shika-Blyat

And let $U_2$ be any subspace of $E$
Shika-Blyat

Then, by taking a basis $(e_i)$ of $U_1$ and a basis $(f_j)$ of $U_2$, then $(e_i) \times (f_j)$ is a basis of $U_1 \times U_2$. But since $card((e_i)) = dim(E)$, and $card((f_j)) \leq dim(E)$
Shika-Blyat

so $card((e_i) \times (f_j)) = dim(E)$
Shika-Blyat

and $card((e_i) \times (f_j)) = dim(U_1 \times U_2) = dim(E) = dim(U_1) = dim(U_1 + U_2)$
Shika-Blyat

but that assumes thatt $U_1$ and $U_2$ have basis, so like if you want to avoid this, just let $U_1$ be a subspace with an explicit basis, just like $E$ entirely with the basis $(X^n)_{n \in \bN}$, or any subspace generated by an infinite subfamily of this basis
Shika-Blyat

and take $U_2$ to be the subspace generated by the family of polynomials you want
Shika-Blyat

is this clearer ? @broken sun
Thank you very much for your help.
what the values of the first row of AB are going to be ?
ok, how do you computed it ? @hollow grove
I mean, what are the calculations you did to get these values
just take first row of A
you did $6R_1+9R_2+0R_3-7R_4$ where $R_i$ is rows of B to get the first row of AB
Anticipation

i.e. lin combo of the rows of B by coefficient of first row of A
a nice and compact way is to start from wAB and force it to be a row from AB, which is trivially done by setting w equal to a canonical basis vector and associating (AB)
then just associate (wA) = v and you're done
if you choose the vector w = e1 = [1,0,0], you get the solution anticipation gave
wdym?
you need all three lines to intersect for it to be a solution
like the bottom intersection is only a solution to the red line and the purple line
so if your system is all three lines, then its not a solution
You're basically looking at two different system of equations here
solution 1 is a solution to the system that has the purple line and green line
but it isn't a solution to the system that has all three lines, since it doesn't satisfy the red line
similarly, solution 2 is a solution to the system that has the purple line and green line
but it isn't a solution to the system that has all three lines
this lemma and proof r both valid right? and could i simplify

this is vaguely how projective geometry works
you say that parallel lines intersect at "infinity"
is it okay to use linear algebra approach if your subject is calc 3?
wym
By any chance would anyone know what the answer to this would be?
or how to solve it?
wrong channel, but you just take the slope then solve for k
that's what I've been doing but for some reason it still doesn't add up
wait nvm
I just realized my issue
uli

really depends on what they're solutions to
(x,y,z) and (X,Y,Z) are solutions to what?
a system of linear equations?
great
your answer for b is incorrect
it is actually possible. Consider the system of linear equations 0=0 over Z2
we're working over the real numbers.
no finite field stuff.
if 25 planes have two points all in common then they also all pass through the line that goes through those two points @wintry steppe
ah i guess i need to show B_2\B_1 is lin indep
and $B_2\backslash B_1 \cap W = \emptyset$
Anticipation

Anyone good at vectors, dm me - I can pay
nvm this doesnt work

<@&286206848099549185>
can anyone help me simply this expression
please ping me if anyone can help
yea, do you know the axioms of a vector space?
nooo 😭😭
From
Rule 4
If your question has not been answered for a minimum of 15 minutes, you may use the Helpers tag once. Please do not try to bump your question using this ping unnecessarily. Do not abuse this ping. Do not individually ping users with the Helpers tag without their express permission.
that said, do you know how to simplify if x, y, z are regular ol' variables instead of specifically vectors?
since the process is the same

is this rightttt
yes.
okay thank you!!
Oooh okay thank you!!!


how do i show that u1 tensor v1 is equal to u2 tensor v2 if and only if there exists a c in the field such that u1=c u2 and v1=c^-1 v2, where u1,u2 and v1,v2 are in finite dimensional vector spaces U and V?
im guessing this is from the definition of a tensor product but really not sure how to link it togethor
I need help with my math
channel is in use, please try another one
it could mean scalar multiplication by 0 but that's trivial
You want u_1(x) v_1(y)=u_2(x) v_2(y) for all x,y in domain for u_1 tensor v_1 to be equal to u_2 tensor v_2.
Now pick a y such that atleast one out of v_1(y) and v_2(y) is nonzero . Let v_2(y) be nonzero. Then v_1(y)=cv_2(y) for some c in F,i.e.,c u_1(x) = u_2(x) for all x
You end up with u_2=cu_1 and cv_2=v_1
Im confused on how singular value decomp works algorithmically, I think I got the sigma and Q* matrices, but how do I get P? $A=P\Sigma Q^*$
moshill1

My notes say compute $w_i=\frac{1}{\sigma_i}Aq_i$ for the columns of Q then extend to an orthonormal basis
moshill1

wait wdym by the first line, You want u_1(x) v_1(y)=u_2(x) v_2(y) for all x,y in domain?
uh we didnt really define it like that hm
the way it was defined was a quotient space of the free vector space F(VxU) quotiened by the subspace U with elements of certain properties
honestly idek how to treat elements of the tensor i just know their properties and how theyre defined
Yea,in context of finite dimensional spaces,free space just means a normal ordinary vector space
There are no non free finite dimensional vector spaces
wait this isnt their product right
its the cartesian product?
f(x) and g(y) are elements in F. f(x) g(y) is just a product in F
i figured out the reverse direction its just the forward one
(x,y) is a member of a Cartesian product
hmm
okay so their tensor being equal implies that for every bi linear map in their dual space F we have F(u1,v1)=F(u2,v2) right
I think so
but then what do i do from here lol
I think you take a particular bilinear map which simplies your situation
Let's say e_1,e_2,...e_k is basis for V
Consider the bilinear form f such that
f(u_1,e_1)=1,f(u_1,e_2)=1... f(u_1,e_k)=1
and f(x,v)=0 for all x not in span{u_1} and for all v
This will force u_2 to be cu_1 since otherwise one side of this bilinear product will be zero,while the other is nonzero
so that means f(u1,v1)=a1+...an, where v=a1e1+...an e_k right
and since we must have F(u1,v1)=F(u2,v2) this means that u2 has to be in the span of u1
okay i see it
but then how do we show the same for v2=c^-1 v1
like what input of F do i consider
Repeat the same thing
Consider f such that f(e'_1,v_1)=1,f(e'_2,v_1)=1... f(e'_m,v_1)=1 where that's the basis and f(x,b)=0 b not in span {v_1}
This would imply v_2=c'v_1
now f(u_2,v_2)=cc' f(u_1,v_1) for any bilinear form
=f(u_1,v_1)
Now just take a nonzero bilinear form and you end up with cc'=1
Yea, That's a very common FDVS technique
Choose a function that makes your life easier
Both
Is there a way to find an orthonormal basis consisting of eigenvectors of a matrix without finding an eigenbasis and orthonormalizing it?
(Question for ref)

not in general. but you wont have to use gram schmidt in this case
Yeah nudge on how I dont need gram-schmidt please?
Cause Ik C*=C so ik that there is an orthonormal basis by Real Spectral
C is self-adjoint so its eigenspaces are orthogonal
you have 4 distinct eigenvalues
so one eigenvector from each space
any choice of an eigenbasis will automatically be orthogonal you just have to make them unit length
in general, for self adjoint maps, you only have to orthogonalize the vectors from the same eigenspace
so if i have v1,v2 from eigenspace E1 and v3 from eigenspace E2 then i only have to orthogonalize {v1,v2}
(as an example)
Ok might've just messed up finding the eigenvalues then
let's be lazy for a moment
uuuh
,w eigenvalues {{a,0,b,0},{0,a,0,2b},{b,0,a,0},{0,2b,0,a}}

yeah I messed up the chacteristic poly lol
that looks distinct
I got complex lambda 
anyway, every eigenbasis will be orthogonal since C is symmetric
and you have distinct eigenvalues
so you wont have to worry

how can i show that a projector is orthogonal over a certain subspace?
P is orthogonal over V iff $\langle u, P[v]\rangle=\langle P[u],v\rangle , u,v\in V$
moshill1

(iirc that that's the characterization)

no, because from a) you can't get (0,1,0)

in this case you have that every vector follows (a, a, 2a, d)
therefore you get: a(1,1,2,0) + d(0,0,0,1)
so the dimension is 2

i just plugged in 0 for t and the deteminant is 0
plug it for -1
why
to check if answer d) is correct
Yep
Where is it
waitr
K
Just send it
K
math is fun tho
vector spaces make a lot of sense once you get them
you just have to get them
it's not like, idk, calculus, even if you know how to integrate, lots of integrals are going to be hard
you can ? [1, 1, 1] - [1,0,1] ?
oh shit you are right, guess the teacher was wrong
Yeah I think that's also a basis
it definitely is, it's just not the usual one
(pong @north steeple)
anyways yeah, a) is indeed a basis
yep
ok
yeah, pinged you for that reason lol
well let me think for a sec
i remeber doing it
i mean, to get something like (3,1,3) you'd have to first do (1,1,1)-(1,0,1) and then add 3(1,1,1)
which means you can't get all vectors in the subspace with just those two vectors
well, not necessarily, this is a bit subtle, in fact
im gonna email anyways to try and get a mark for it
a basis of E is "a set of vectors that belong to E, that span E, and that are linearly independent"
a) does span E using a finite number of vectors, (1,1,1) and (1,0,1) obviously belong to the space, and they are linearly independent
therefore it does follow the definition of basis
yes that does make kinda make sense
Anyone can help me with 10-12?

thanks
Thanks. Wasn't sure which section this would belong.


I've been stuck on this for a while
how do i manipulate the right side to get x'?
Anyone good at vectors, dm me - I can pay
No
Try showing $(A-uv^\top)(x+\alpha A^{-1}u) = b$
Anticipation

let me look
thats because $x' = (A-uv^\top)^{-1}b$ and you want to show $x' = x+\alpha A^{-1}u$ also, so you equate the 2 and try to show they are actually equal
Anticipation

hey can i dm you if i get stuck @zealous junco ?
yea

find eigenvalue and eigenvectors first
D = diag(eigenvalues) and P is the eigenvectors
so D is the eigenvalues diagonalized ?
yes the eigenvalues will be along the diagonal of D

{kind=link}
anyone lol?
Remember the definition of a linear transformation
so how would i do this prob?