#linear-algebra
2 messages · Page 156 of 1
uh
you asked if "nonoverlapping subspaces" implies orthogonal
i gave you an example of non orthogonal vectors whose spanned subspaces are the closest thing to "not overlapping" i can think of
I see
mm I'm just phrasing it poorly
does it make sense to say
"they don't contribute in other subspaces"
i still don't know what that means
sounds like you're asking about having 0 projection
but since projection is related to dot product, that answers the question
Mmm I see, I was trying to see if you could define orthogonality without inner products
but it was silly
I think it's a good question since defining an inner product is kind of dependent on the vector space or field, it just doesn't really have some clean general form that I know about unfortunately
hey I'm learning transformations and my prof is terrible. can anyone help me with this question?
what part do you need help with? what have you tried?
I just dont know how to answer it and my prof is suupper russian
said this will be on the test
🤨
how do I find domain and codomain of a transformation?
well it's a function, so you have to look at what goes into it and what comes out
here, T takes in vectors with 3 entries and spits out vectors with 3 entries
Would it just be R3 and R2 then?
why do you say R2?
I'm not confident on why, I've just seen most solutions in the textbook saying that
well
it spits out vectors with 3 entries
which implies that the codomain should be...?
also 3?
can you be a bit more precise?
like I said, the topic is new and my prof hasn't been explaining things very well
you gave the correct domain but the incorrect codomain
what was your reasoning for the domain being R3?
because it takes in 3 values right?
so domain is how many it takes in and codomain is how many it spits out?
but what does that have to do with R?
sure
presumably the x_1, x_2, x_3 are real numbers
i mean they could be complex numbers as well, but the question doesn't say
let's pretend they're real 😌
Hey, could someone eli5 this to me, I understand what this is saying but I have no idea why?
nvm I totally missed the fact that there's more below
Hey guys, i was wondering if you could help me check my answer on this practice problem and lmk which options are correct thanks
I got to this point
GCD is 3 so somehow I need to manipulate the rows/ columns so I have 3 where 1158 is at right now
There is a theorem saying "positive-definite". Multiply stuff by -1 somewhere in there.
this is a baby version of the theorem, in fact you can factorise even non-invertible matrices as A= BC, just a comment
Gilbert Strang has a pretty cool course wherein he does decompositions very nicely
on youtube?
yeah MITopencoursewares
There's a short version, and he has a longer lecture series as well. I've only recently started watching the short ones
@jolly rivet this is a general case, Let A be a m×n matrix of rank r.
Prove that there exist matrices M and E, of size m×r and r×n respectively, such that M has linearly independent columns and E has linearly independent rows, and
A=ME.
This is the short version.
https://youtu.be/YrHlHbtiSM0

MIT A 2020 Vision of Linear Algebra, Spring 2020
Instructor: Gilbert Strang
View the complete course: https://ocw.mit.edu/2020-vision
YouTube Playlist: https://www.youtube.com/playlist?list=PLUl4u3cNGP61iQEFiWLE21EJCxwmWvvek
Professor Strang describes independent vectors and the column space of a matrix as a good starting point for learning lin...
@red prawn thanks for sharing that
He has another Linear Algebra course on the same channel in which he spends more time on each topic. But the short ones are impressive, how fast he demonstrates everything
Strang is ok, his problem is just that he never goes into the theory, at least his course and book which I have roughly seen, it is more like just result based and computational
for application
yeah that's his focus, for applied stuff. No jordan decomposition, or else he'd have to do chinese remainder theorem?
well I would be interested to see a proof of jordan decomposition through chinese remainder theorem, never seen it. Looks quite interesting if its true
See Humphreys' Lie Algebras
maybe I will, I need to study some more till I go on to Lie Algebras
I've heard ppl say the inner product or dot product measures the amount of similarity between two vectors
I feel like a much better term is "overlap"
What do you guys think
A dot product is a special case of an inner product. Consequently, every dot product is an inner product, but not vice versa. @spare crystal
Every inner product is a dot product with the right choice of basis
Right choice of basis?
I meant that a inner product is a dot product wrt an orthonormal basis
Overlap is nice. I like to think of the inner product as a definition of "distance" in a sense.
Have you heard of Gram–Schmidt?
Would you mind showing me how that's true with an integral inner product?
Yea,So that point kinda follows from gram schmidt
I can't picture it atm
nix
Is this just orthogonality of two functions?
Pn is polynomials of degree less than or equal to n?
Ye
I'm trying to imagine how exactly a dot product like thing would come out of it but I'm just about to pass out lol
Take P2 as an example
Try turning the third row of your augmented matrix back into an equation (like you started with) and see what it tells you (it's telling you something very important)
Sure
3a-b-c= 0 so does that mean i can plug in 0 into the rest of the rows
guys
when we say
ker(L)
do we mean the basis for the kernel
of all the vectors in the kernel
Consider the basis {1, (x-1/2) , (x^2-x+1/6)}
(ok, not exactly orthonormal,but just divide by their norms)
to show V and W are not ismophoric is it enough to show a linear transformation from V-> W is not one to one
Yes
but could there not exist another linear transformation from V->W that is an isomorphism?
Oh wait I thought you meant if a transformation is not an isomorphism
ohh nah i meant the 2 subspaces being ismorphic or not
like i have a linear transformation
i proved that its not an isomorphism
does this mean the 2 subspaces arnt isomoprhic
or not nessessairly
No definitely not
There are transformations V->V which aren't isomorphisms
Two vector spaces are isomorphic iff they have the same dimension I believe
ah
okok
one more thing
what does it mean when they say
"finite dimensional vector space"
like whats the significane of the word finite
${1,\sqrt{3}(2x-1),\sqrt{5}(6x^2-6x+1)}$
nix
Yeah,that works
I think that's the orthonormal basis
is R3 finite dimensional
I definitely need to sleep now but I'll check back in tomorrow morning
In general tho thank you Drake for taking the time and effort to help a tired fool lol
Yes
why is this asking why these 4 things are the same
b doesnt necessarily have to be 0 unlike a though
correct
"only the trivial solution" means "only the solution where all the variables are 0"
whereas the "exactly one solution" referred to by part (b) will not be all 0
[but there's a way to make it homogenous so that (a) applies; think about the system it represents]
It's just asking about FTIM
I need to find matrices P and Q so that D = PBQ where D is the Smith normal form.
My smith normal form, D is
1 0 0 0
0 3 0 0
0 0 6 0
I know that P is the transformation matrix
and I've done like 20+ steps to get from B to my SNF
I did rows and column operations to go from B to D
well, is that really the right way?
but how will you be able to figure out what P is ?
that's my problem lol
find the basis of B?
I can't do a Jordan normal form on a non-square matrix. Or can I?
@rustic panther eigen/jordan decomp is for a square matrix which represents a linear map from a vector space to itself. nonsquares don't represent these and so eigen/jordan decomp doesn't make sense for em
but for nonsquares an analog exists called singular value decomp
@gray dust thought so
what's an analog decomop/ singular value decomp
Can someone kindly help me with the transitional matrix to get from D to B?
you can literally look up singular value decomposition on Google
I have the set A = $B(0_2, 1) \ {0_2} ⊆ R^2 $ where B is a closed ball
and I need to find the int, fr of A
and find if A is a closed or open set
is it correct to say that int(A) = A\fr(a)?
and that fr(A) = {(x_1, x_2 ∈ R^2 | (x_1)^2 + (x_2)^2 = 1 }
and A is a closed set?
anyone know if a solution manual exists for sheldon axlers Linear algebra book?
i feel like i can go through questions and get them all wrong without knowing
Seeing solutions won't do anything for you
If you aren't sure about a solution. First: Go through every claim you make and ask yourself how you can justify it. Second: Ask here for us to take a look.
self learning without solution manual is kinda tough no?
but how can you know if you solved something correctly?
No, it's how you should learn
for example, I had this problem and I'm not sure if it's correct
although I "solved" it
Ask
discuss with peers
Why aren't you sure about that one?
idk
i feel like its wrong until i know its right
also, im new to linear algebra
You can just substitute it in, and see if LHS = RHS, and yes it does, so it's right
I can understand more if you are unsure of proofs, but this you just plug in and see if it's right
What is fr?
frontier

Mathematics Stack Exchange
Find the closure , Frontier and boundary of the following set in $ \mathbb{R}^2$ given by
$$ S={(0,1) \cup (2,0) } \cup {(x,y): |x|+|y|< 1 }$$
Answer:
The closure is given by
$Cl \ (A) ...
then in which channel I should ask?
hm, in topology probably
I guess that's more appropriate, or analysis. Seems like it's a real analysis question
You did the right thing, and your answer is fine
@marble lance eh just closure-interior
Oh, thanks
inner product naturally defines a norm by $\norm{x}=\sqrt{\ip x}$
RokabeJintarou
as for the other way, a norm must satisfy the parallelogram law to naturally define an inner product
Hmmm... thx!
So I've got this problem with its solution. But i don't understand what the ratio between the two vector's components represents:
note that "parallel" in the context of linear algebra means that one is a scalar multiple of the other
so $u = kv$ for some scalar $k$
Chillin' with Quillen
and yeah, this computation "behind-the-scenes" is jsut determining what that scalar is
note that vectors "don't care about" position (in a linear algebra context)
so you can imagine all vectors as coming from the origin (0 0 0), hence parallel vectors are "overlapping"
so say this was in R^2 and the components were (4, -3) and (x, -18). would 4/x = -3/-18?
right
the point is that the ratios will be the same, since one vector is just a "stretched" version of the other
$\begin{pmatrix}4\-3\end{pmatrix} = k\begin{pmatrix}x\-18\end{pmatrix} = \begin{pmatrix}kx\-18k\end{pmatrix}$, so $4 = kx$ and $-3 = -18k$, hence $4 / x = k = -3 / -18$
Chillin' with Quillen
(the last equation comes from solving both prior equations for k)
so $\frac{4}{x} = \frac{-3}{-18}$
Chillin' with Quillen
and you can solve for x from there since there's only one unknown.
you could start by assuming that ku + lv =0 for some nonzero k, l, (u and v are linearly dependent)
Then try applying A to it
whats this Question asking?
is it just that infinity isnt even part of the Real set?
Question, when some sets for a matrix is said to be Det = +1
does this mean the transformation is preserved?
wdym by preserved
for a square matrix
for example SO(3) for the Orthogonal set
3x3 matrix it says with Determinate = +1
right if the determinant is involved its definitely square i just dont know what you mean by 'preserved'
So if a determinate is > 1 then the transformation is scaled linearally?
or positive
maybe I am mixing up vocab here
the determinant cant be interpreted geometrically as the factor by which things are scaled, with a negative value implying a change in orientation. so det(A)=1 means that area is preserved, but that doesnt necessarily mean its an isometry which might be what youre referring to
things get stretched basically
Indeed
so more positive more stretch
negative reverse stretch
0 no stretch at all
more magnitude means more stretch. if its negative then i guess you could say somethings getting flipped. zero means things are squashed into a smaller dimension.
for 3x3s a determinant of zero means things are squished onto a plane, a line, or just a point at the origin if you want to think geometrically
that makes sense
if 0<|det(A)|<1 then theres a bit of shrinkage
K just wanted to make sure
because I always seem to come back to Det's and looking at them wrt to rotation matricies
side tangnet but nix are you familiar with Quaternions?
yea its good to have a good geometric understanding of things in linear, it can help a lot. rotation/reflection matrices are definitely one way to have |det(A)|=1 but theres also shears.
and no not really
are you familiar with Rotation matricies?
yeah i guess
Well I am a bit familar with Quats currently I am trying to map the operations from a Rot Matrix and do the analogous in Quaterion land
So regarding a Rotation Matrix, If I construct a Rotation Matrix from Two Axis Vectors, V1 (Remaining Fixed) V2, being some other axis lets say Z-axis thus Y-Axis being the new computed (Cross product between) X-Y Where Y = X cross Z where would axis of rotation be?
for this to make more sense say I have some vectors A B C in 3d space
A=(1,0,0) Aligned with the X-axis of some 3D coordinate system, and I want to Align that reference frame with some New Vector Call it B, Z=(1,0,0)
A's Z axis is aligned with (0,0,1)
but I want to align with a new Z so as shown (1,0,0)
then my Vector A gets rotated 90 degrees about the Y axis
if I make a Rotation Matrix from a vector along the x axis and rotated to to align to a new Z reference then the cross product would the be the rotation between those two which would be my Y-axis
?
that is a very interesting problem. i cant say im familiar enough to be of much help. that said, for 3 space you can obtain the axis of rotation by finding the eigenvector with eigenvalue 1 (so if you have the matrix for that transformation A basically just find the null space of A-I). in four space, however, im fairly confident 1 will not always be an eigenvalue, so im not sure how an axis would be determined. a four dimensional rotation is quite a difficult thing to imagine.
So I wrote it in C++, I take two vectors one X-Axis vector in some 3d space and the Z-Axis vector I want to align too
and it works
so for example
say in a video game you have gravity aligned
Z=(0,0,-1)
suppose you want to rotate your character to be upright on another 2D Plane
but you need to rotate gravity itself
to align with the new reference frame
you can use the Rotaion matrix to do this
the other option besides a rotation matrix is to use a quaterion to perform rotations
but to do this you need to construct a quaternion that describes the same axis angle rotation that the Rot Matrix would output
then take your system as a quat
and right multiply it by the quaterion you just constructed that is rotated by that quat to align with the new Z
We can cheat Nix
and create 1:1 mapping to 3d
for the axis of rotation
where we set a quaterions real component to 0
and the vector part to be some vector
hence q = w + vxi+vyj+vzk, pure quat w = 0 q = 0 + 0i + vyj + 0k means a axis of rotation about the j axis which is pitch
anywho thanks tho nix
I will dig deeper
sorry i couldnt be of more help. i wish you the best of luck though
thanks happy holidays
you too 🙂
merry christmas
how to formally prove the forward the statement?
ik its obvious to see it holds
call the set U. the forward direction is 'if U is a subspace of F^4 then b=0'. we show it by assuming U is a subspace of F^4 then showing b=0
from the definition of U & the assumption U is a subspace
-_-
what does rank tell me about linear independance
for a matrix A, rank(A) gives the maximum number of linearly independent cols A has
Can someone explain to me how this works?
the idea is that we know what T does to (1, 0) and we know what it does to (0, 1)
we dont know what it does to (-1, 5), but we can use linearity to figure it out
the basis vectors
since T(-1, 5) = T(-1, 0) + T(0, 5) = -T(1, 0) + 5T(0, 1)
again this is just linearity; "linear" means that:
- T(a+b) = T(a) + T(b), and
- T(sa) = s*T(a) [where s is a scalar]
so we just apply these rules to "break up" T(-1, 5) into -T(1, 0) + 5T(0, 1)
[you might've heard something like "linear transformations are determined by how they act on the basis" to describe this idea]
and since we know what T(1, 0) is
and what T(0, 1) is
we can just substitute those in
then simplifying gives us our answer.
thanks, might take me a few mins to grasp it
is there an equivalent kind of procedure done on normal functions I can abstract this from
like, i get it, but i feel like i've never done it before, but suspect i have with functions
this doesn't work for general functions since it relies on linearity
ahh
in fact, this ability to study linear functions based entirely off what they do to a small defining set of vectors (a "basis") is why we care about linear functions/linear algebra at all
though analogues do come up in other areas, e.g. group homomorphisms are determined by what they do to the generators of that group
[in fact, linear functions can be regarded as homomorphisms of vector spaces - but thats a bit beyond this conversation]
seems like it
hi is it just me or is this wrong? https://i.imgur.com/561ebyO.png
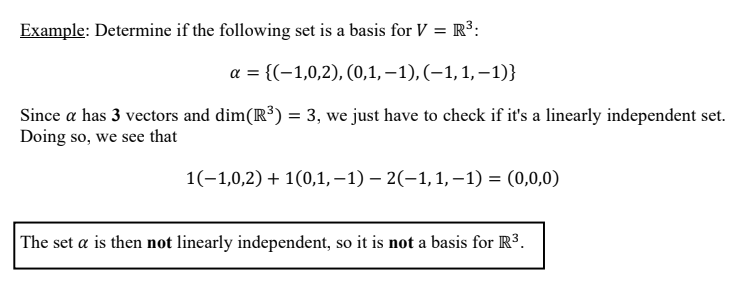
that linear combination doesnt work right?
ya ok im going crazy no one pointed this glaring mistake and its too late to tell my TA
if all three are wrong then maybe they were originally different vectors for which it was true, and then the writer changed them but forgot to change that part?
this example is shockingly wrong 😮
ya
if the 2 was swapped to -2, and -1 in (0, 1, -1) was swapped to 1
then it would be linearly dependent
two signs off
wait is basis of range the same as basis of column space
pretty much. the column space can be thought of as the range of the matrix transformation
is basis of the subspace just the linearly independent vectors?
a basis of a subspace is a list of linearly independent vectors with length equal to the dimension of the subspace
(though tbh that's how "dimension" is defined, so it's fairly useless)
it's a list of vectors that spans the subspace and is linearly independent
so i put the vectors into a matrix, do RREF, and then any column with a leading 1 corresponds to a vector in my subspace
which subspace
because any column with a leading 1 is linearly independant
the row space or the column space?
RREF will give you the columns that are linearly independent, but you have to remember that you have to go back to the original matrix to figure out the actual basis vectors
okim confused
theres basis of row space, basis of column space and basis of subspace right?
the row space and column spaces are subspaces of vector spaces
say you have an mxn matrix; this represents a linear transformation from R^n -> R^m
the row space is a subspace of R^n
and the column space is a subspace of R^m
so basis of subspace is something that is found through finding the basis of columnspace and rowspace
or am i just making that up
I think you need to first understand what is the basis of vector space?
could you tell what it is?
i mean i know it involves RREF and linearly independat vectors
no
oop
it involves the concept of linear independence
but "involves" is basically a useless word
and taking an rref might be used to calculate something
but almost all definitions of "basis" do not mention the rref of a matrix
a basis for a vector space, say V is a list of linearly independent vectors that span V
in your case in order to find basis of row space and column space, rref is ok , using that you can easily tell which are linearly independent rows and columns respectively
basically if you take the span of the basis then you'll get the whole vector space
but you don't need rref always. It is just one way of doing it.
all these mentions of span without someone defining it
follow a good book with 3blue1brown as well , his videos are not enough
3blue1brown also uses determinants way much when it isn't needed
I just watch his videos for context really
im done with lin algebra after this final exam as far as i can tell
ya but i understand how to do it
just not the concept
well
ik im not setting myself up for success
True or False
If $A^2+3A+4I_3=0$ for a $3\times 3$ matrix $A$, then $A$ must be invertible.
nix
I believe this is true but I want to prove it either way.
aha ill try that
A^-1 will be ||(A+3I)/(-4)||
thank you! ill be able to check my answer when im done 🙂
that is indeed what i got. very interesting
would the fact that A is 3x3 imply that the eigenvalues of A are the roots to the quadratic x^2+3x+4, and one of them has an algebraic multiplicity of 2?
The eigenvalue could just be one of the roots of x^2+3x+4
That is the minimal polynomial is a factor of x^2+3x+4
i see. that makes sense
so then any matrix which satisfies a quadratic like that where the coefficient on I is nonzero must be invertible
i said the coefficient on I is nonzero, so that wouldnt apply
Yea,you could construct an Inverse by "dividing with A" on both sides
However,If The coefficient of I is zero,The matrix could still have an inverse
Take A^2-A=0 Identity satisfies this and has an inverse
Minimal polynomial of T has a root 0 iff T is not invertible
So apparently in order to find if a matrix is invertible one could just find out if there's a pivot in every column
now may someone explain me why
well what matrix do you have when youve row reduced to have a pivot in every column?
a matrix where rows may be linearly independant and 0 0 0 at the bottom?
uhhh
where you basically have pivots also
well if theres a pivot in every column there wont be any rows of zeros since we're talking about square matrices i assume
yes square
yes you are right
oh
okay I see now thanks
i just realized that another way of thinking about it would be to think about the determinant with echelon form
because like if you are in R^3 and there is a row of zero you're going to get a degenerated parallelogram hm
i think that this formula can be used for finding the determinant and the inverse,
but if im not mistaken and if i recall correctly
there was a scenario where we don't consider the b_ij
i dont know if it's exactly the b_ij but does anyone know what scenario it is
i guess it could be the cofactor expansion of a matrix full of 1s
nvm im stupid
i just didnt know my formulas oof, 2 days before the final
https://cdn.discordapp.com/attachments/306153640023031820/787923720739356682/unknown.png
https://cdn.discordapp.com/attachments/689948583562444858/787922751486558268/unknown.png
so it's in the calculation of the determinant that you must consider the thing at c_ij
not required for the calculation of an inverse- you just take the inverse of that determinant


gotcha
the adjoint is the matrix of cofactors transposed
so for getting the inverse of a 3x3 using the adjoint, you do nine 2x2 determinants and of course the one 3x3 determinant of your original matrix
hey
if you had let's say a 4x4 matrix and you wanted to find the determinant
instead of doing this cofactor expansion, would it simply be possible to find the "volume" of the shape that would be generated in 4d by multiplying the column vectors magnitude
sounds kind of weird because it's in 4d doe so idk
considering you put it in row reduced matrix obv
or maybe it should actually be row reduced
ive tried it and it doesn't seem to wrong, not sure if i've done something wrong or if my reasoning is just ape
oh no that wouldn't make sense if it would be row reduced
because the "volume" wouldn't be the same because of row operatoins even doe the system itself would be equivalent
for 3x3s and up i usually row reduce
you just have to account for the operations
so if you switch two rows then add a minus sign out front. if you divide a row by 3 then put a 3 on the outside
luckily if you just add a multiple of one row to another you dont need to change anything
oh ok phew
because i was like how he is going to do that with multiple added to rows
makes sense then, thanks
will probably do that for 3x3 and higher
haha i like linear algebras because you can just figure random stuff like that out of nowhere
we never really calculated the determinant in class with row reduce, always cofactors so yep
there are an uncountable number of shortcuts and tricks they dont teach
and you can indeed come up with them yourself
Can anyone help me with this question?
for a part we have to show it is linear so when we put x+y in the left hand side how do we show Qf(x+y)=Qf(x)+Qf(y)
can anyone answer a question i have about orthonomal bases
@fair vector what have you done till now?
For b part i just set the right side =0 and found the kernel to be the space of even functions
that's right
For a part m honestly stuck at the beginning
do you know the definition of linear map?
yep
then it must satisfy linearity and homogenity
a simple way I use to satisfy both Q( f + a g) = Q(f) + a Q(g)
f, g belong to V
and a belongs to the field over which V is
cant it also be Q(bf+ag)
in this one equation you can satisfy both the conditions , it can be anything, just prove it linear using definition and you are done, you wrote the same thing as me anyway
Go ahead
okay
so
I have an orthogonal basis for a subspace of M2x2(R)
the inner product is <A,B>=B^J times A
^J just means switch out the a11 and the a22 values with each other
anyway
so i found an orthogonal basis for this
and 2 of the matrices in the basis
have norm of 0
so i was unsure on how to normalize them
to make the basis into a orthonormal basis
Are you sure this is an inner product
yes
Then,You can't have a nonzero element having zero norm
wait soryr
the inner product is
waitttt
omg
i mis read the question
omlllll
LOL
it was B^t not B^j
smh
anyway ty
Whats the difference between isomorphism and homomorphism in simple terms?
Isomorphism is a bijective homomorphism
ok
Yes
ye
so really what you would've done instead is $$U+W = { (x_1, x_1, y_1, y_1) + (x_2, x_2, x_2, y_2) \mid x_1, x_2, y_1, y_2 \in F }$$
ugh
$U+W = { (x_1, x_1, y_1, y_1) + (x_2, x_2, x_2, y_2) \mid x_1, x_2, y_1, y_2 \in F }$
Yes
\{ and \} but whatever
i see
Ann
yes basically
wdym
whats rough work
scratch work
notes you make for yourself while doing a problem
yknow, shit like that
stuff you don't submit for grading
yeh
are you saying that his example is scratch work?
im confused on what is better
no
god
ijghj\s
dgghuhufhg
ugh
no
im saying
the x1 and x2 thing that i gave you
is rough work
in an attempt to explain to you why the answer isnt what you wrote

{kind=link}
{kind=link}
{kind=link}
did i ever say rough work == incorrect work
well
you did say u dont submit rough work
u usually only submit correct work no?
rough work and incorrect work are both things not submitted but the two are not the same omg
ok
what does U intersect W even look like?
if (x,y,0) \in U and (0,0,z) \in W. why is the intersect 0 ?
are we doing the intersection element wise?
why is the result only 1 element and not the same amount of elements as U or W
if (x,y,0) \in U and (0,0,z) \in W. why is the intersect 0 ?
the only vector which can be represented in the form (x,y,0) AND in the form (0,0,z) is the zero vector
are we doing the intersection element wise?
what does that even mean...
intersection is intersection
i dont know ...
but i understand what you said
i thought about it another way tho
If all vectors start at zero
thats the only point they have in common
0 is there because every subspace, or rather vector space has 0 as a vector
yeah
so kind of an analogy for two subspaces to have intersection as 0 , would be that two sets are disjoint
though this is not a nice way of explaining that
yep
for the forward
U + W only has one representation
i dont get the 0 = v + (-v) part
If a non zero v exists in U int W,0 will have atleast 2 representations
0+0 and v+(-v)
-v could also be in U tho?
-v can be seen as an element of W
hi
so I had this question:
Find a∈R so that the list v=[v1,v2,v3]t is a base of R3, where
v1=(a,1,1), v2=(1,a,1), v3=(1,1,a),
I've found a = R \ {-2, 1}
now how can I prove that the vectors span the space?
Did you try proving by definition
Meaning, for anything in R3, there is a linear combination of your list that is equal to that?
And IIRC, the linear combination is unique, there should be one and only one solution for any vector in R3
if you show the list v is linearly independent, you are done
^that's a little indirect
I mean it's true yes but you wouldn't be so sure that's what the marker would accept
And if the marker doesn't accept a proof by definition then nothing would work LOL
I am writing to explain him not writing a solution for my assignment
I won't write like that obviously
I mean, I assume it's a question from homework tbh
I want to say that <v> = {a1v1 + a2v2+ a3v3 | a1, a2, a3 $\in$ R}
If it were a normal question yeah I'd just get the rank
hivo
to write the correct way is his job, we are just to guide him
it is, yes:))
because this would be the definition, no?
so I need to show that <v> is included in a1v1 + a2v2+ a3v3 | a1, a2, a3 $\in$ R
and a1v1 + a2v2+ a3v3 | a1, a2, a3 $\in$ R is included in <v>
hivo
The longest side of a triangle is 11 meters longer than the shortest side. The medium side is 15 meters long. The perimeter of the triangle is 46 meters. Find the length of the shortest side of the triangle.
Can anybody help me with that?
What channel?
Oki thx
actually to show that v is a basis of R^3, I should say that <v> spans R^3.
then <v> = {a1v1 + a2v2 + a3v3 | a1, a2, a3 ∈ R}
and that <v> ⊆ R^3, which is obvious
and that R^3 ⊆ <v>
_> nothing is obvious
I mean, you're kinda saying the definition - the 'proof' is somewhat not there
Do you know what's a determininant
yes
So the 'there exists a1 a2 a3, for any v' forms a system of linear equations
Then the statement becomes is there a solution for any unknown v
Then the statement becomes, is the determinant of the coefficient matrix of the system of linear equations 0
then you show it's not 0, then all the iff statements connect and you get your 'vectors span space' proven
^ if anyone has a better proof please do share
don't we have an infinity of linear equations?
No you have 3 equations
For any vector in R^3
I am saying, for any $v\in\mathbb{R}^{3}$ with components $v_{1},v_{2},v_{3}$, that
$$\begin{pmatrix}v_{1}\v_{2}\v_{3}\end{pmatrix}=\alpha_{1}\begin{pmatrix}a\1\1\end{pmatrix}+\alpha_{2}\begin{pmatrix}1\a\1\end{pmatrix}+\alpha_{3}\begin{pmatrix}1\1\a\end{pmatrix}$$
for some $a$ you determine, where $\alpha_{1}$, $\alpha_{2}$ and $\alpha_{3}$ depend on $v$ itself.
ShatteredSunlight
Oh wait nvm, it is spanning for those a you found, yup
Yup seems simiilar
I wanted to prove that there isn't any other a outside {-2, 1} for which the system is linear
okay, thank you:D
So what I wrote above proves that <v> spans R^3?
A "basis" for a vector space of dimension n is a set of vectors that has three properties:
The vectors span the space.
The vectors are independent.
There are n vectors in the set.
And they are equivaent
So I guess yes
:-?
I'd say it's the necessary working
I mean 😦 it kinda implies that it is not the case there is not a solution rather than there is a solution, which is kind of different you know?
Actually honestly yeah I think you should write further "since the determinant ..." "hence ..." it's a few more lines of English and you already have the working so why not
yeah, I know. I'm not sure how to prove that there is a solution
yup, I will!
Existence of solution is tied to the determinant
It ties in to invertibility
I mean, it's why invertibility of matrices has a huge "The following are equivalent"
thank you. I didn't know about this one
hmm, then there should be a solution for any b in R {-2, 1} because the determinant is not equal with 0
Yup
I guess you mean for any a not equal to -2, or 1 - and then for any vector in R^3
yup
to see if for any a in b in R \ {-2, 1} v generates R^3
Hi:)) I have one more question. I'm solving this problem
First I proved that b is a basis by calculating the determinant (which is always equal with -18, thus it is always linearly independent)
and now I want to find the coordinates of x in relation to the basis
should I take each vector one by one?
I said that [x]B = [x,y,z,t]
and x*[1,2,-1,2] + y[1,2,1,4] + z[2,3,0,-1] + t[1,3,-1,0] = [2,3,2,10]
I wrote it as a system
then solved it using the inverse of a matrix
so the coordinates are [1,2,0,-1]
is this right?
yo if i have two linear transformations that map R3 to R3 and they both have rank 2
what are the possible values of the ranks be if i compose them
Have no idea what to do
do you know the defn of linear independence
I don't know how to write it
When the vectors are in this form
Just a1f1 + a2f2 + a3*f3= 0?
remember what the zero vector of C^2[0,pi] is, & what it means for two functions to be equal
but yes the form isnt any different
Is anyone able to explain this like I’m 5?
Nyrre
Ok so I do that formula
Like lambda + 11 and then all the way across diagonally
Right ?
Then just get the det of that
But what about the invertivle matrix part
you need to diagonalize the matrix A, if possible. So first find the eigenvalues, you can either use gaussian elimination to find the characteristic polynomial or just use the determinant
@tall thunder
look it up online how to do diagonalization, we can't help you like baby. First learn how to find eigenvalues and eigenvectors for an operator
Nyrre
first study then come here
@tawny tulip is your negatives mixed up ? For the example you showed
Or was that like a thing your supposed to do
Nvm I got it 😇☠️ thanks
maybe not for 5 year olds but if youre fairly comfortable with the column perspective of matrix multiplication:
multiplying the eigenvectors of A by A is just scaling them. so if you put the eigenvectors as the columns of a matrix P then AP is just P with its columns scaled by each eigenvectors' eigenvalues. but that can also be achieved by multiplying P on the right by a diagonal matrix with the eigenvalues D. so AP=PD. from there you can solve for A or D by multiplying P^-1.
Hey nix, thanks for explaining I really appreciate it
yo can someone help me out with this
i dont really understand how you can just multiply a vector b that number
any vector takes on the form (x, y), and you identify that with the complex number x + iy
now multiply complex numbers
when you get the result in the form a + ib, what vector does it correspond to?
okay, let me write it out in a bit more detail
When it says "Consider $\bC$ as a two-dimensional real vector space with basis ${1,i}$," it means that our vectors are literally complex numbers, of the form $a + ib$ for real numbers $a, b \in \bR$. If you're used to writing vectors as tuples, then you can write $(a, b)$, and think of this as the complex number $a + ib$. Now, we want to figure out what multiplication by $1+i$ means. Given any vector $(a, b)$, where $a$ and $b$ are real numbers, the multiplication is given by $$ (1 + i)(a + ib). $$ Now write this out.
TTerra
you're literally just doing complex number multiplication lol
just the "consider C as a two dimensional real vector space with basis {1, i}" part may be a bit confusing
Hi, if I have a f:R3 -> R2, with canonical basis in domain and domain, and a matrix A, what process should I follow? Sorry by mistakes
It's about linear transformations.
what are you trying to do
ok i understood that part but I kinda just have trouble creating a matrix from that information
we want to find f(x,y,z)=...
Yes
this the right idea?
i put the left vector on the wrong side by mistake i think
^I'm also confused about this problem 😖
Does slope count as algebra?
Not this algebra
take two arbitrary elements and show that their sum obeys the identity
ok
just try something, play around a bit and see if you can get it
R^(-4,4) is the set of real valued functions on (-4,4), don't think this is like R^n it's a separate notation
Axler's talks about a product of vector spaces, but it seems hard to search up
Is that just his own thing?
@tame mural it's just cartesian products
I see
for the forward, under the assumption that its closed under addition. Taking another real valued continuous function on interval [0,1] g $\int^1_0f + g = 2b$
Yes
yes
another?
recall that $U + U$ is the subspace composed of all $u_1 + u_2$ for $u_1, u_2 \in U$
Chillin' with Quillen
but also recall that $U$ is closed under addition, since it's a subspace
Chillin' with Quillen
what does this tell you?
right, $U+U = U$
Chillin' with Quillen
What is the difference between isomorphism and equailty?
equality says two things are literally the same, isomorphism says that they behave the same/can be considered the same
so theyre very related notions
I see, so I'm not going to go wrong by thinking of them as the same
but with a slight semantic difference
I see, so linear isomorphism = equal as far as linear algebra is considered?
I have a feeling this is for a test, but
Shouldn't all subspaces always have inverses and identity?
no, its from the axler book
lol
yay
yep
exactly my thoughts, just needed to confirm
yeah
i see
How is something like this done?
Working backwards for multiple linear equations?
you want to find a sub space that intersects trivially with U and behaves in a way such that V=U+W
so try out a couple of options
my initial thought its (0,0,-y,y,0) but that obviously doesnt work
W=0 vector 🕶️
W = {0} doesnt work
cap
if W = {0} we just get U which is in F^5
yea im not sure lol
How can I develop this binomial using newton’s binomial theorem?
I'm confused about -1/2
Isn't linear algebra?
Right, ty
nope
like
i dont see it
try (t,2t,w,2w)
Ok I need a quick verification because this is driving me nuts. I have a 6x4 matrix which represents a homogeneous linear system
When is it possible for this system to have non-trivial solutions?
I thought I had it didn't work
there are nontrivial solutions to the homogeneous system when the nullity of a matrix is nonzero. since nullity=# of columns - rank, the matrix would need a rank less than 4
Hmm ok so far so good, is there a way of finding the rank in general as a function of the elements in my matrix?
I vaguely remember looking at the determinants of 4x4 submatrices
hm that definitely wont always work
"as a function of the elements"
does "perform gaussian elimination" count?
since thats the general algorithm
the normal way to compute rank is to get it into ref or rref and count the pivots
I was hoping to get a polynomial out of this
is there something different about this matrix that would lead you to think something like that is possible?
About half the elements are 0
i see
I'll make a quick picture
yea was just about to ask
right i see what you mean now
I guess I can do a Gauss elimination but I'd hoped there was an "cleaner" way to solve it
The annoying part is, I know that it has non trivial as soons as a single variable is 0
So the only remaining problem is all 4 being non zero
elimination is very tedious with variable entries yeah
well the rank is also the number of linearly independent columns, right?
yeah so i think id try examining the conditions for one of the columns to be linearly dependent. then it would have nullity of at least 1.
since there are so many zeros this should be pretty feasible
I could of course cheese it by putting it in a calculator but that would be the easy way out
Them again my deadline is in 18 hours and I still have much to write
Hmm wait this is interesting
"the rank of the matrix is strictly smaller than n-d it and only if all n-d square minors vanish"
With n being the number of columns
what is d?
In this case the dimension of a variety but it's arbitrary in the general case
I think
But I fear this will just lead me into a circle for my specific problem
Project matrix is a diagonal matrix of full rank? As in no 0's on the diagonal?
hm.. we defined a projection matrix as "if it corresponds to a projection onto a subspace"
or if a linear transformation P satisfies P^2 = P
What you've written down is basically "Any square matrix can be Gauss Eliminated"
for context, this is a question that I am given a possibly correct/incorrect statement, and I have to explain if it's true or false
Are you working over the real numbers?
yeah
I'm not sure about that P^2 = P part
Because indeed, any matrix can be gauss eliminated (those elementary matrices) into a matrix with only elements on the diagonal
But I don't think that it's possible to have that P^2 = P property for reals
oh
Though you might wanna wait for a second opinion on that
yeah, but thanks anyway
*I don't thinks it's always possible
anyone want these? Professor gave these at the start of the semester and said good luck on your exams.
are all unitary operators hermititian. or is it the other way round?
I don't think it's either
so to show this i have to make sure that
- f is one to one and onto
- it preserves the property of linear transformation
but how do i do it if i dont have an explicit definition of the transformation?
you can just make one. thats what its asking you to do
i wouldnt think too hard about it. keep it simple
so let say, i make v be p2(c) and w be C_3, then the transformation is just T(a_0 + a_1 X +a_2 X^2 ) = (a_1,a_2,a_3) ?
then from that i show these
your index is off but i like the idea
Well, Check the numbering,but yea it works
Oh thanks both, notice that 🙂
P_2(C) over C is isomorphic to C_3, would P_2(C) over R be?
is it no, because p_2(C) over R has dim 6 while C_3 only has dim 3?
Yea,It won't be
Is this a good reasoning?
Thanks
Also,2 vector spaces of same dimension need not be isomorphic(when the corresponding fields are different)
For example V over F_2 is not isomorphic to V over F_3
xD_Lopez
when getting the bases of row and column space of a matrix, do i use rows and columns of the original matrix?
the row space should be R1 and R2 since they're non-zero, and column space should be C1 and C4 since they have the leading entries
You can use the final thing as well
Span{original rows}=span{rows obtained in rref}
xD_Lopez
Yes
thank you!
The row space wouldn't be span{(1,-3...) ,(3,-9...)} though. you also need to include the other 2 rows
but if it's asking for the basis then it would only need the first two rows right
Not sure i understand that last part
I get that the span contains each individual vector
I dont get how he deduced that its the smallest subspace of V
<@&286206848099549185>
do you see why, if a vector space contains each v_j, then it must contain span(v_1, ... v_m)?
no
well span(v_1, ... v_m) is the set of all linear combinations of vectors from {v_1, ... v_m}
yes
and if your space contains {v_1, ... v_m}
as well as maybe some other vectors
we can certainly take linear combinations of {v_1, ... v_m}
even if we entirely ignore the other vectors in that space
hence we have all linear combinations, i.e. we have span(v_1, ... v_m)
so ${v_1, \dots, v_m} \in V$ implies $\mathrm{span}(v_1, \dots, v_m) \subseteq V$
Chillin' with Quillen
that is to say, any vector space containing {v_1, ... v_m} must contain the span of these vectors, and hence be "at least as large"
so the smallest is the one that contains only the span
(i.e. when that subset sign is an = sign)
i understood most of what you said
basically:
vector space contains {v_1, ... v_m}
vector spaces are closed under + and scalar *
which means we can take any linear combinations of this set
ye
and they'll still be in the space
ye
hence span(v_1, ... v_m) is in the space
ye
so if V is our vector space, span(v_1, ... v_m) is a subset of V
since span(v_1, ... v_m) will always be a subset, the smallest possible vector space is span(v_1, ... v_m) itself
uh okay forget the linear algebra, maybe we just need to think about sets then
suppose i have the set {1, 5, 6}
ok
what is the smallest set with {1, 5, 6} as a subset?
{1,5,6}
right
replace {1, 5, 6} with span(v_1, ... v_m)
and the conclusion follows*
*well, we also need to make sure that span(v_1, ... v_m) is actually a vector space [that is, a subspace], but that's what the first half of the proof did
ok
so
i think i understand
if we have the vector (1,1,1)
the theorem states that a(1,1,1) is the smallest subspace of V that contains (1,1,1)
not 100% sure what the notation a(1, 1, 1) means
a is a scalar
oh
the set {a(1, 1, 1) | a is a scalar} is the smallest subspace containing (1, 1, 1) yes
that visually doesnt make sense to me
{a(1,1,1) | a is odd scalar} is a smaller subspace containing (1,1,1) ?
that's not a subspace
ohhhh
subspaces should be closed under scalar multiplication
for three-dimensional real vectors, you can visualize subspaces as lines (if one-dimensional), planes (if two-dimensional), or the entire space (if three-dimensional)
{a(1, 1, 1) | a is a scalar} is then one long line that you get if you "stretch out" the vector (1, 1, 1) [centered at the origin] infinitely in both directions
i understand
and this line is certainly the smallest subspace with (1, 1, 1) inside it