#ACRO MODE
1 messages · Page 1 of 1 (latest)
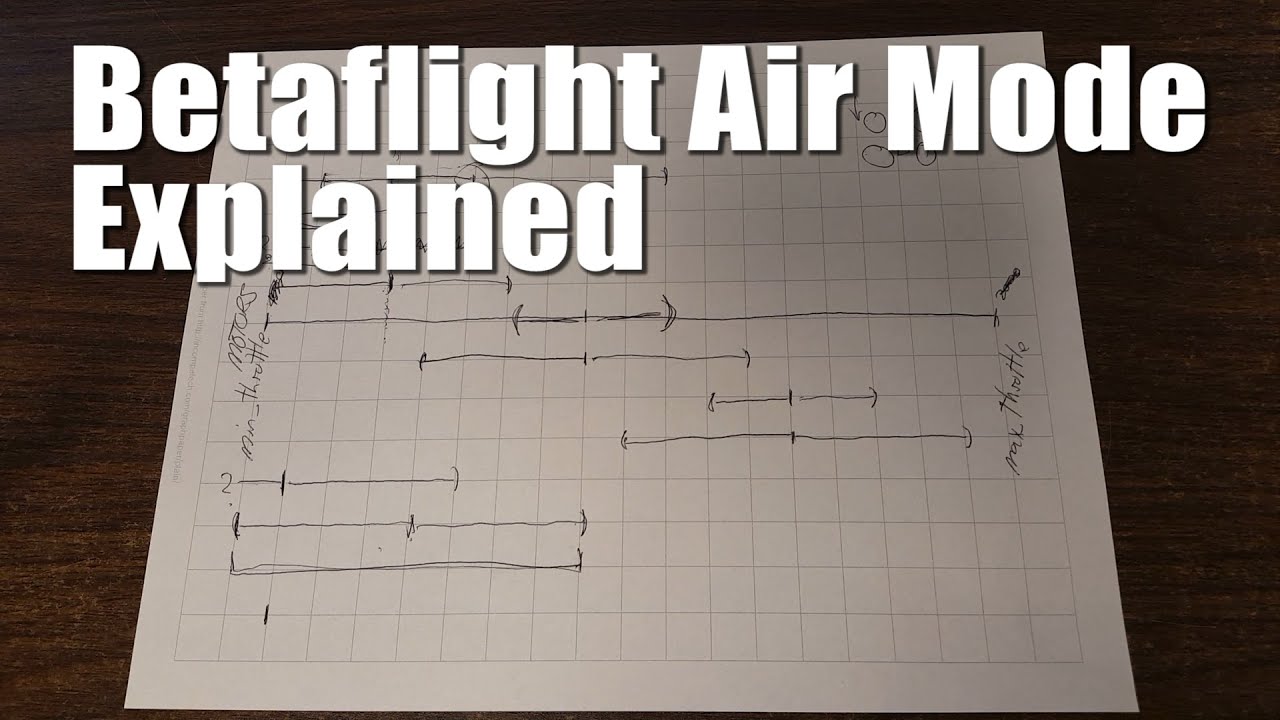
Betaflight introduced something called "air mode," but few people seem to really understand what it does. Air Mode increases command authority at low throttle. It's actually not that complicated, so let's break it down.
If airmode is enabled then 'Air' text on osd, else - 'Acro'
Ah, thanks, I learned something too then
Thanks
Almost all online sources explain air mode incorrectly
Suddenly, this video has the correct explanation. the harder part is to understand why there is so much incorrect information around airmode on the net
I think the most confusing part is the relationship between what is described in the video as airmode (and what is also known as airmode in other multirotor firmwares e.g. https://docs.px4.io/main/en/config_mc/pid_tuning_guide_multicopter.html#airmode-mixer-saturation) and what actually happens when you set Permanently enable airmode in the betaflight configurator.
The mixer behavior changes (pretty much) as described in the video but there is also a bunch of other things that behaves differently with airmode off.
When I dug through the git history I also found a point where the mixer behavior was not affected (that part of airmode was effectively always on) by turning airmode on or off in the configurator.
PX4 is the Professional Autopilot. Developed by world-class developers from industry and academia, and supported by an active world wide community, it powers all kinds of vehicles from racing and cargo drones through to ground vehicles and submersibles.

in most sources airmode is simplified to pid_at_min_throttle which is forcedly enabled by airmode