




127 messages · Page 1 of 1 (latest)
Sorry bad data and it sent too many
Fixed
Having issues with noise spikes at 75hz on pitch axis. I think it's probably antennas
For blackbox
anything less than 100Hz - 200Hz will always be a mechanical-related vibration/resonance
💪💪
loose wire over the gyro
Thanks that's probably the antennas and I'll check my Rx wiring
Pretty

The last log that looked just like this was fixed by sorting out some physical problems with wiring, so that's the first thing to check.
I've never built anything this big, so take what I say with a pinch of salt. On bigger builds the motor/prop noise extends to lower frequencies. In this case all the way down to the 70 to 80Hz are where you're getting pid oscillation. The rpm and dynamic notches need to be able to extend into this region to tackle the noise

You've got the dynamic notch min down to 74 which is good, but maybe drop it to 70 to be on the safe side. But the rpm filters are min 100 with 100 of fadeout, so they won't be fully effective until 200Hz. Try setting a min of 65 with a fade of 20 so that we get more out of them in the trouble spot
You may find with the extra targeted filtering (and fixing any physical issues you can find) the problem goes away. But the fact that the pids are oscillating like this means that it will be prone to coming back again if anything goes out of balance in the future. You might want to look at reducing the overal pid gains a bit to make it less prone to oscillating - depends how dangerously you like to live
And my somewhat controversial opinion - heavy d-term filtering is a bad idea. It delays dterm so much that it reinforces this sort of pid oscillation and creates brittle tunes that are ok one moment and oscillating the next. My preference is to use much more gyro filtering instead of d-term filtering since gyro filtering doesn't cause any phase delay between the P and D terms

If you want a different (and more experienced) set of opinions I can recommend posting the log to the BF discord https://discord.gg/M2KkpHkR
uh, your RC looks a bit ropey - are you getting unusually low LQ? Or maybe check the ADC filter isn't on in edgetx

the bb log is not that bad.
just the d-term filtering is a pain in the back
larger kwad's are actually easier to tune.

d-term should be fixed pt1 and not dynamic.
cutoff frequencies
Keeping my eye on this
Mid 7" build, designing a 10"
might keep going up from there. Learning a lot from reading this
I haven't tuned it yet, I was using a rough PD balance tune forthe tuning of filters. I will apply settings and test the quad tomorrow. Thank you
oh its my dodgy ep1
ive read through all ur comments

@minor marsh two dterm Low pass filters, one at 55 and the other 65?
@faint stream and my question is have i set too many gyro filters
ive set the fade on the rpm too btw
Well, you've got two opposite recommendations for how to approach filtering. Boroma has actually built big quads and I haven't, so logic would suggest trying Boroma's suggestions is more likely to work
your point on the reduce dterm filtering was intresting
cause less phase delay
which i assuming makes dterm less likely to throw a tantrum
yes, but I'm pretty much the only one who is putting that forward. It can certainly be made to work with lots of dterm filtering
👍👍
I'll test different approaches tomorrow
Heavy on the gyro or heavy on the dterm and see which has best results
When you go so far does it then bump the waveform past, back out of phase as it gets even more delayed?
Sort of. You have a fixed delay in terms of time, which is a variable in terms of wavelengths at different frequencies. So there are a series of harmonics where you get reinforcement, and the higher harmonics the dterm peak is an increasing number of wavelengths displaced from the original signal. Between the harmonics dterm acts normally, so the noise gets suppressed between the harmonics and amplified at each one. With no dterm delay, the dterm is 0 when the the rate of change of the gyro is 0, i.e. at the top and bottom of the gyro sinewave
When the dterm delay is small the first reinforcement frequency happens high enough to be suppressed by the low pass filters. But the current fashion is to use very little (or none 😬 ) normal low pass filtering (gyro filters) and so much dterm filtering that you can get reinforcement down below 100Hz. It seems bonkers to me
Part of the problem is that we're influenced by the tools we have to visualise the data. Lots of dterm filtering makes the graphs look nice in blackbox explorer. Until the oscillation kicks in.
 I still have a lot to learn, evidently
I still have a lot to learn, evidently
we all do.. 🙂
That's what keeps it interesting. I don't know how many times I thought I understood some part of it only to discover that there was more to it. And the whole hobby is huge so there are always more bits to discover
@faint stream your wrote: My preference is to use much more gyro filtering instead of d-term filtering since gyro filtering doesn't cause any phase delay
no no no!
every filter has a price tag - and phase delay is one of the items you pay for
yes, as there is an oscilating frequency at araound 72 hz.
you wanna stay below this oscilation - not to amplify this oscilation.
do not set the min notch filter below this frequency.
@faint stream you wrote: heavy d-term filtering is a bad idea. It delays dterm so much that it reinforces this sort of pid oscillation and creates brittle tunes that are ok one moment and oscillating the next.
pidSum = P + I - D
for first order filter there is a max. phase delay of 90 degrees. for 2nd order filters there is max. phase delay of 180 degrees.
figure out!
bf devs are very good fairy story tellers.
and flying kwad's you need D ... the correct amount of D pls.
i assume 90 percent or more kwad's fly with a strange tune. for sure it is a spicy tune.
Yes, dterm starts with a natural phase shift of 90 degrees due to the derivative. When we see dterm driven oscillations in the log it is always delayed by approximately a further 90 degrees so that it reinforces p. I suspect d in the graphs has the negative baked in, it goes opposite to p in flips. You truncated my text when you quoted me, I said gyro filtering doesn't introduce delay between p and d like dterm filtering does. All filtering adds delay, and the primary cost of gyro filtering is increased prop wash. No free lunches. For the builds I'm flying I find I can get acceptible prop wash with minimal dterm setups
Your point that filters have a max phase shift fits and might explain some things that don't make sense to me. In which case I would have been wrong in suggesting at higher frequencies the dterm is shifted by multiple wavelengths. There would need to be some other explanation for the higher freq oscillations then. Interesting.
sorry what does the dterm static low pass filter 2 do
both gyro lowpass filters 👆
only dynamic lowpass (and dterm lowpass lowered to 70hz vs 75hz)
👇
im gonna start tuning my step response now, i feel that my logs are looking nice and clean compared to before
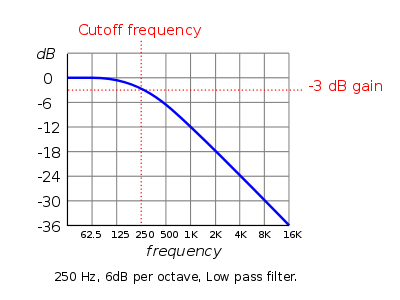
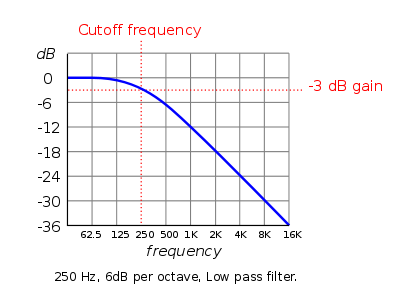
The two dterm filters do the same thing, having two just allows more control over the filtering by choosing different cutoffs. Low pass filters don't have a hard cut off above which everything is gone, it's a gentle attenuation that increases with frequency, like this: https://docs.huihoo.com/audacity/2.0.3/m/images/2/2f/250hz_low_pass.png
thanks
yeah i got that weird 75hz stripe to a much lower amplitude to the point that i feel comfortable with tuning
The slope of the line is the order of the filter, with higher order filters being steeper than lower order ones. By stacking two filters one after the other you increase the amount the high frequencies are attenuated. Sounds good. How did you end up with the dterm pid slider so high? (based on your screen grab in the BF discord)
i think my 65hz rpm filter and 70hz dynamic notch fixed whatever was wiggling and making big noise at 75hz
therefore dterm was happy since it wasnt fed noise
That's good. The new dynamic notches and rpm filters are fantastic
I normally try and use a static notch if I can see an obvious frame resonance frequency. It's a cost effective filter
i set it so my dynamic notch had two notches available to takeover from the static one
there were like two vertical noises
one at 75hz (bad) and one at 150hz (not as bad)
the dynamic can just hop on both of those
the only thing that annoying rn is that pidtoolbox is shit and wont run on my pc (i probably just broke by installing it wrong)
do i even need that Dterm LPF 2 at 150hz?

ffs i ripped the usb off and ripped the pads too
oh nightmare
shit
you can set the cutoff frequency to zero and it is gone
Next week after pay day I'll grab a new fc and change that, rn it's not getting warm motors with the same filters minus one of the static LPF on gyro
yes, as shown in the picture
it flies great
even though the usb is ripped and i cant change it
its stuck in a state of flying pretty good
best its flown ever, (new frame parts made all the difference, especially the pressfitted mid plate)
then leave it as it is and be happy.
men, you should not chase birds or animals
I was polite
not polite anymore?
a couple months i saw a video of an fpv long range guy chasing an ibex.
blind on one eye.
i was thinking about a notice for the police.
there is an exceptions - ravens.
the other thing is chasing cars - for a nogo as motor sport is a no go for me.
expect allergic reactions on these two points 😉
prerefered would be chasing the steel variant; https://myibex.ch/
Dein Schweizer Velo. So individuell wie du. IBEX steht für Nachhaltigkeit Wir produzieren unsere Velos in der Schweiz. Mit kurzen Wegen, erstklassiger Qualität und ganz nah am Kunden. Individualität Dein Velo steht für deine Persönlichkeit. Dein Ibex kannst du individuell auf deine Ideen abstimmen Tradition Als Schweizer Familienunternehmen sind...
@minor marsh i realised what ive done was not ok
it was fun at the time but now i see the that im just an asshole
not gonna be chasing wildlife again.
i have no problem with this as it was not a real chase.
thumbs up for flying - it flies well
yeah i wasnt like getting megaclose, keeping the throttle low not to piss mr bird off to much
https://streamable.com/sdrqu4 see here i try avoid birds
btw. what frame is it?
Semi custom frame
It's a source one v4 body with extended rear and true-x mounting holes for source one v3 arms
I need to tweak the DFX files and I can share them here. It's a nice design imo, looks clean and isn't super heavy
absolutely
How much is a 9 inch
depends
like 50dollars more expensive than a 7inch
bh2812 motors are like £20 each
most 7inch motors cost the same
its just the frame that cost more
i will get the files to you
been busy and fusion is being ghetto
see this happens every time i try save a dfx file

thanks - i have no experience cutting frames.
will ask a local fpv guy who is cutting his own frames.
dxf* 🙂 @silver dawn
Remember you need some arms too btw.
😉
Thats 9 inch?
Where are the arms
I said you gotta get the arms separately
You can use any source one v3 arms
5inch, 7inch, 9inch arms
I literally said in the message above
This?


{kind=link}