
#Neurobot-1000 3d model project
1 messages · Page 8 of 1
yuh thats what im thinking
might make them worse than rubber for the muscle liner
that said if the placement is right, they won't push agianst each other much
hopefully
ideally
HOLD UP
what if we arrange them in such a manner that they're not too squished when heat is needed and we squish them when heat loss is needed
genius
somebody add that to the document
and we layer the cooling alongside the foam in such a way so that when it squishes, the cooling sinks in rapidly
Using the cooling tubes
Lemme send a drawing of what I'm thinking
however just realized that sometimes requirements vary: for long hold of muscle, which is what we need insulation for, it'd be different needs than a sudden movement and then relaxation. We would have to (somehow) design it so that when the muscle is extended continuosuly there is no foam compression, but when quickly extending, there is foam compression
we want fast heat loss during fast contraction + extension, but slow heat loss during a continuous contraction
idk how we'd do that mechanically
it's becasue we want the return stroke to relax as fast as possible, which needs fast heat dissipation, but the pulling stroke needs to have as little relaxation as possible, which needs low heat dissipation and high insulation
hence a continuous pull, for efficiency, would want to lose as little heat as possible
but a fast pull and release would want to have squished foam with fast heat disspation
Maybe a second nitanol sheathe on the outside of the insulative lining that squeezes the lining during the retraction stroke???
It wouldn't need any insulation because it would only be used once, and then allowed to slowly reset.
@floral quarry
ok now i really gotta sleep rip
😭
Lemme cook for two more minutes

We use a plate of some sort with foam on top that supports the coolant tube
Plates slide outward to squish the foam and coolant tube falls in

Then we use another mechanism to slide it back up when needed
Shitty drawing, i hope you catch what I mean
In the air pockets during closed area, we arrange wires in a 2d spring coil to heat the air pocket
Mate I can't even draw a straight line
Temp sensors are also ridiculous cheap, i can get one for less than half a cent
@opaque quartz thoughts before you sleep
OH! so the tube is far away from the mechanism, but is pushing towards it. When a mechanism activates, the plate moves out of the way and the tube springs into place? I like it
Looked up prices, bulk rates are indeed cheap
Yassss
We move cooling in when needed, and move it out when not needed
And design the mechanism so it is run with the crappiest and least power consuming motors so we can use this for every muscle
Might need some tiny gearboxes to help multiply some torque in the process
we can in fact combine our ideas as well; A nitinol sheathe, around the tube and muscle. the muscle is surrounded by air-filled foam. The plates are between the tube and the nitinol muscle rod.
When the current travels into the plates and the sheathe, the plates seperate whilst the sheathe contracts. This crushes the foam whilst moving the tube into place and compressing them all togehter
the plates can be nitinol with shape memory in the open position and closed position, same as sheath that surrounds it and the muscle
I got a great idea
Use magnetised plates that then repell
No motors
Scratch that
Nitinol is ferromagnetic at high temps
we could use regular springs to reset the tube position
the force of the external mesh would counteract the spring
when they let up, the spring pushes the tube out of the way whilst the plates slide under it
pretty elegant system ngl
ty for the idea, it is really good for on demand liquid cooling
Isn't that... Just regular magnets??
No it's paramagnetic at normal temps
The hecks a paramagnet
not affected by magnetic fields right?
Not magnetic
Yes
biotech loves that aspect of it
I can't find what temprature it turns ferromagnetic at
seriously ty for the help joker
imma head off now
i love working on this project with u guys
Every time i think i mostly understand physics someone's like "yeah this material just isn't magnetic sometimes"
Shit is very weird even I gotta say

What's next non neutonian gasses
oobleck
Honey
I said gas not fluid
Molasses
Yeah wait
Apparently that's like non-ideal gasses, which occur more at high pressures since they can interact with other gas molecules more often
At 100atm or so maybe
Don't touch the co2 lakes if you're deep see diving or something around 100atm though, likely fairly acidic
Forbidden soup
@opaque quartz go to sleep or I'm going to throw another problem at you
Because I just came up with one
@red oyster if you were wondering about the cat ears


@ruby lagoon pls add them to the docs later
Throw it at me and I'll see if my braincell can comprehend
which docs?
The neurobot one where everything is thrown in
Based on my argument above about the cooling tube, once we get the tubes in, how do we get them out
See reference to above conversation with matthew
Ah, I don't have access to that one

Matthew aren't you meant to be asleep
He's doing documenting
Count a million sheep and sleep nice
Mods time him out for 8 hours
Should I make a trello or something btw? I could work on tasks for the spine/power bank in the design doc, matthew could work on the head tasks, etc.
Alright, I made a public trello and put what I'm doing on it: https://trello.com/b/5YM2i79k/neurobot-1000-tasks
I didn't know Trello supported gif backgrounds
Organize anything, together. Trello is a collaboration tool that organizes your projects into boards. In one glance, know what's being worked on, who's working on what, and where something is in a process.
@short tiger
Thanks

Pretty neat finger

Improvements to nitinol muscle design: Swap nitinol rod for square nitinol bar with hose-conforming conductive surface on cooled side. Swap polyurethane foam for carbon ceramic foam if carbon ceramic foam has more conductivity than it whilst compressed. Swap metal bars for plastic rollers with foam outer sleeve. Change nitinol wire mesh to electrically insulative, but thermally conductive tape membrane dilated by nitinol actuators at the sides. Add radiating flaps to the exterior of the muscle.
The muscle will no longer be heated on the outside, giving it better cooling properties when compressed. The plastic rollers will move to the side purely from the pressure of the dilating membrane, and slide back into place once the membrane expands and the springs push against the hose. The radiating flaps will improve heat transfer into the surrounding air when the carbon foam is not insulating the muscle.
@red oyster i recommend having a look at the progress log in pins if you havn't already
(Slightly) off topic but
I found this video of a robot hitting siu using ai that mimics human movement
Here it is
nice
Idk how impressive (or relevant to the topic) this is but i found it pretty fun
Apparently its by nvidia
i rate that robot as having some of the best humanoid locomotion of all commercial robots. I've seen it advertised a lot as well.
I like the method used to have a central hinge
Well we are talking about nvidia and real madrid. Two pretty big names in their respective worlds. They have more then enough money to pull up with something like this
Although im still not sure if nvidia only developed the ai or did they put their hand in the robot development as well
fairly sure the head is from unitree
so it might actually be unitree

seems like they went for the "motor in thigh" method of locomotion using pulleys
120nm torque which is similar to what we're aiming for
i don't like their approach
their robot waddles because it has very few degrees of freedom in the legs and has to spread its feet
we want our robot to have good hip strength sideways as well as forwards and backwards
i assume that this robot, like most commercial robots, for the sake of cost cutting only has strong motors in the forwards and backwards axis
Also it doesn't look like a cute anime girl, instant failure on that part 
How's the status of the power generation? We still thinking stirling engines or have we moved onto the next hottest thing?
You misunderstood what i meant by chinese aproach 😭
i think this vid is a clue, before it jumps, it rotates its legs inwards so that it's using the forwards/backwards motors
for first verison we're going with purely batteries
Also these ropes holding it up make me doubt it can stand on both legs just fine completely, hmm
Like it's probably one ai trying things, whilst we're aiming for multiple ai, hmm 
But it is a good source that our scope is possible
That also does not have anything to do with what i meant
we can test pressurized stirling engines whilst we test nitinol muscles for late development versions
Tbf i think the lines are there to prevent something from happening rather then being there as stabilising force
You are free and welcome to state your meanings and intentions rather than leave us guessing.
we'll wanna do that too to prevent falls once it goes over a certain angle
Anyways just to make it sure with everyone. By Chinese aproach i meant buying a robot, taking it apart studying how does everything work with each other and then make our own thing that has very close appearance of the original while we claim its fully original and that everybody else is delusional to think we stolen somebody’s else’s work
As you can see that was supposed to be a joke

I think that's calles reverse engineering.
I forgor how that was called
So i just said the entire process
But generally chinese base their whole technology on reverse engineering

It's okay, we all forget things now and again.
The ant steps.
So yeah. Lets just reverse engineer neuro sama lol
The physical equivalent to CTRL+C CTRL+V.
Just a bit more work
And time
And money
Ngl
Tho i cant blame anyone for doing shortcuts like that
Blocking technological progress behind copyright seems stupid
What exactly do
You mean by that?
Everything being prohibitively expensive to do new stuff, where you already need some form of established ground to stand on before potentially sinking lots of money into a passion project.
Taking a cheap shortcut and using someone else's work to get yourself started.
I can see when you are coming from

What does full range mean?
180°?
360°
matches human back. Not sure exactly how many degrees that is. I think 180
but includes curling
We'll have to see if it's better than using 4 motors at the base pulling wires up the spine. If not we can do that instead
i think there are some movements that need this arrangement though

i'll draw the pulleys and more wire later today
I've seen ads for this thing
Though based on how it looks (doesn't look like its legs can move side to side, would perish on a non flat surface) our design is just... Better? How does this design look better than the peak of robotics engineering
The government shuts down all sufficiently advanced robotics projects and steals the plans for purposes
i think it's due to cost savings in their robot. They need to make a profit off of every robot, and not as many robots will be sold as cars will, so the cost to manufacture needs to be a percentage of the sale price that's less than when selling a car. Cars are usually sold for twice the price of manufacture, so the price to manufacture a robot needs to be less than half the cost of the sale price of the robot. Motors are the most expensive parts of a robot so cost cutting will impact how many strong motors they fit onto their robot.
their asking price is something like 12000, and a motor that supplies 120nm can cost as much as 500 or 1000. So they probably don't want to add too many of them. I would be surprised if the cost to manufacture was more than £6000.
£6000 is 6-12 strong motors, so they probably went with only two large motors, and that saves them 2500-5000 to spend on the other parts of the robot
robot might cost anywhere from 2000-4000 to manufacture probably
this is all off the top of my head, the actual figures might be quite differrent
the robotics expertise probably went into designing a performant robot for low manufacture cost
however that means their robot doesn't perform at the peak of what current day technology can offer
the more axis of rotation the more motors or actuators you need to use, and the more energy supplied to the joints to handle differrent terrain, ballancing, etc etc, the more batteries you need
Alright, someone's gotta say it: the muscles aren't in the finger, they're in the forearm stretching from the elbow to the wrist. This system may move fingers but will be really weak.
Also, I feel like the trash talk about other robots/ robot companies is kinda premature if we don't have a working robot ourselves
I'm just saying that it looks really simple
Fair. Simple is good design though: https://en.m.wikipedia.org/wiki/KISS_principle

KISS, an acronym for "Keep it simple, stupid!", is a design principle first noted by the U.S. Navy in 1960. First seen partly in American English by at least 1938, KISS implies that simplicity should be a design goal. The phrase has been associated with aircraft engineer Kelly Johnson. The term "KISS principle" was in popular use by 1970. Variat...
simple is also cost effective and cost effective is good
As a programmer, I can guarantee that, what you think it's simple, may in fact, not be simple. That's were this principle fails.
That's true. "Just calculate only the synapses that matter" is the whole sparsity problem in AI. It's more a rule of thumb than a hard law.
I still desperately need to use this acronym in a pun

Upgrade your browsing experience today with Opera using my link https://opr.as/Opera-browser-zirothtech !
Energy storage is a fascinating topic, and hugely important to our energy transition on earth. However, sometimes inspiration and advancements comes from space! NASA is constantly pioneering technology we can use, from solar panels to batte...
we've been silly, we don't need an 'alternator' to capture energy from the stirling engine, just a brushless motor
also i've been looking into flywheels for energy storage
if we spin up other flywheels we can use it to adjust the angle of ballance of neuro, and the initial power can be applied via the brushless motor that acts as the power generator.
Gyroscope and battery
yup
to get a dense energy storage the flywheel material needs to be durable, it needs to be in a vacuum, and it needs magnetic levitation
it also presents problems with intentionally changing orientation. I don't know how spinning of other flywheels can affect the permanent flywheel.
would we need a temporary spring energy storage to slow down the flywheel, then spin it back up again?
so many questions...
Hmm.... putting this around the center of gravity, so in/around the midsection like an inner hula hoop, would make balance easier due to gyroscopic stabilization
yup
either spin it down and back up again using harvested energy to turn off upright stabilization, or we can spin up a disk in the opposite direction
not sure how that affects power harvested from the flywheel and therefore its speed, and stabilization
it's an interesting dual purpose system
we have room to make the flywheel very tall and narrow
So as it gets low on power she'll start moving less steadily due to losing the gyroscope
The perks of designing a two of a kind, state of the art, Neuro bot, is that since there is no profit gain, we can be more lenient in our expensive parts to build something that neuro can be proud of ^^ 
rip wallet
ye
It may make control much easier, however, AI's advanced/fast enough today that I'm not sure the help from the gyroscope is needed
yeah i agree
It may also hinder it when the ai tries to fight against the gyroscope and all that
yeah and if we have a mechanical system that counteracts the spin, it has lag as it spins up or down
forcing it to only spin during a 'standing mode' for example
maybe a counterrotation using brushless motors would be fast enough though
how do we draw enough energy for that without running out of power in the battery though?
Isn't movement with a gyroscope weird though
maybe two storage flywheels that transfer energy between each other
it's more stable and looks spooky
I feel like it'd be like strengthing your core when trying to walk across a tightrope. It would make you more stable, but also a bit more rigid
hi folks whats popping
couldn't do stuff today because of my weekly mania and then anhedonic episode
ah, sounds fun
-10/10 wouldn't wish upon my worst enemy

More cool robots: http://www.gadgetify.com/?s=robot
This is a self-balancing robotic cube that you can balance in the palm of your hand or or any flat surface. When the cube is disturbed, the motor activates to maintain balance. It has a STM32 chip. You can write custom code to improve on the balancing algorithm. An app is also available for th...
np bro
neurocube
i'll do some illustrations for hand because i looked at gd's design and it calls for too many motors
In my experience with gyroscopes they don't want to move, which is good for stability but could hamper movement
nice design, needs some fixing though
there's a vid i saw of a robot dog that could ballance on a wire using a gyro
the motor number is equal to human muscle number
the goal is identical movement to human hand
Oh, right. I think the best system here is hydraulic/pneumatic. There are a ton of muscles in the forearm, and having 3d printable hydraulic sacs/tubes there makes making all those muscles so much easier.
we are broke so it means less motor
please remember about the black hole residing in our wallets
hydraulic would mean one motor and a bunch of solenoids... also idk why but homemade solenoids might be much cheaper than buying them?
surely 1.7cm motor doesn't cost that much?
And 3d printing the solenoid valve systems is also much cheaper
currently i have no money to my name (in my defense, i am also a student)
The really small motors actually cost a bit more than the mass manufactured hobby motors
ah
hmmmm
hydraulics for the fingers would require some big redesigns
might unironically be a usecase for the nitinol muscles even for v1
That would probably be much more expensive than the motor system tbh
less efficient but it's less energy for the fingers since it's maximum of 10nm, but more like 1-2 nm usually
idk we can get some strong forces out of thin wire
lets say for example a 0.1cm diameter, 5cm long wire per muscle
Maybe. You also gotta consider the size of the power electronics needed to convert the amps/volts to the right values needed for the nitinol and its desired actuation speed/strength
(The power electronics thing is also the main reason HASEL actuators aren't really viable)
ok lets say we go hydraulics, would it be something like a water chamber in the forearm, with a heating element, and a valve system for each muscle?
brb gonna research hydraulics
holy shit how the fuck am i supposed to reduce motors the hand muscle setup is so complex
I don't think a heating element would really be needed. Maybe anti-freeze if Neuro is going to cold places
how do i collapse it in such a way we need bare minimum motors
yeah there are like 3 layers of muscle on both sides, about 12-20 per forearm and more on the hand
what i drew is the minimum needed for human-like actuation
one way might be to use a mechanical system that combines two of the muscles, lemme find their names real quick...
This is another reason for hydraulics. You can mostly just copy-paste from biology and it will likely work. Eye movement muscles for example:

Wait, full on hydraulics? Doesn't that require a heavy motor to pump the hydraulic liquid?
Yea, one decent sized motor in the forearm around where the bones would be would probably do it
Like a 550 motor, maybe
nvm not possible
brb making dinner
 okey. Just saying, there's pneumatics and electric linear actuators if hydraulics require a little too much
okey. Just saying, there's pneumatics and electric linear actuators if hydraulics require a little too much
Pneumatics would also work. Might have more volume change, but less chance of leakage
Linear actuators would work too. Honestly might be cheaper with how absurdly expensive solenoids seem to be, unless we plan on making solenoids
Apparently there are 20 muscles in the human forearm
i worked it to 8 for v1
Might be able to subtract 1 by removing the spinning motion and replacing it with 1 spinning motor
we may be able to get away with 8
with what range of motion?
our muscles do this by pulling back on the finger bones while other muscles move them around, so it would require at least 2 actuators per finger
There are also the servos in the hand bones, which is shadow robotics design, which remove the need for muscles inside the hand itself

WebMD
Forearm muscles are responsible for the extension and movement of your wrists and fingers.
my idea is that for bending finger we borrow the flexor digitalis profundum and flexor digitalis superficialis, then pull on the palmar interossei, which pull on the flexor digitalis beyond a certain point
so palmar interossei > proximal phalanx which pulls on digitalis superficialis > middle phalanx which pulls on digitalis profundum > distal phalanx
for locking straight setup we power a tiny magnet which creates a lock for the digitalis profundum, making sure the middle and distal phalanx stay straight with the proximal phalanx
@ruby lagoon i will send a drawing attempting to explain what i just said
Heh, that might help. I haven't memorized all the muscle/bone names
I think he's casting a spell
holy shit my laptop camera is not even 2 megapixels
and all i have right now is a keypad
this webcam is vga lmfaooooo
wow
sorry for terrible drawing, had to redraw with my trackpad

the parallel lines are rods for each phalanx
like the bones

this is phalanx naming setup
@ruby lagoon
each mucsle (rope) pulls on the other, and to prevent bending and keep straight, we lock one rope with a tiny improvised magnet lock (whenever required)
could get away for the locks with milliamps of current for each lock
to stretch hand out, we similarly do muscle for pairs pulling on finger, such as one rope - pulley pair for small and thumb finger, one pair for ring and index finger
wrist is - well, already there
@ruby lagoon please give thoughts
I'm not sure the magnets will be necessary, and if they are necessary small magnets are fairly weak and may be overridden by accident (as well as locking mechanisms of that size, depending on material).
I think if we set a max bend, then just pulling back on the finger a bit will keep it straight. See the offset here, and see the sharp angles added that would stop any further pulling back:

nah we have to just lock the rope in place, small magnet is enough
also, what if you have to keep distal and middle phalanx straight but bend only proximal phalanx
Oh! You're adding a braking force against the tendons? That's interesting.
Solenoids are expensive for some reason though, so that might mean winding a bunch of electromagnets. Also I still think it could get overridden since the rope is pulled with a large amount of force
I think bending the proximal phalinx only is the default option actually (well, for activating both opposing muscles). That means all the phalanxes are locked together, while the proximal moves with respect to the knuckle. I can also lower my distal/middle phalanxes while keeping the proximal back, which seems to imply two muscles pulling each finger back and at least one pulling it towards the palm, or at least 15 total muscles for that level of control, though they can work together.

we don't expect so damn much of torque for a finger rope, not so much earlier on that it snaps clear of the brake we add
yes, we will have to mcgyver some electromagnets, but nothing too harsh
the thing is I suggested this system coiled on a pulley (what was the correct phrase again) to reduce motors, as hand strength emerges mainly from upper parts and then arms, as fingers (for v1) don't require that much torque
and as we can control which phalanx to lock and which to not with just two wires and a few milliamps of current, this sort of makes sense
the more than 8-9 motor system also makes sense, but this was suggested by me purely out of a need for as less motors as possible to build an mvp
@ruby lagoon can we add this hack to save cost
Ah, that's another problem: due to economics of scale, motors seem to be cheaper than easier to make electromagnets, or about the same price
Though, some of thse might be good (the 0.01$-0.50$ especially)... https://www.alibaba.com/showroom/tiny-electromagnet.html
Get strong support tiny electromagnet from wholesalers in China at affordable prices. Select from the many options of magnetic lifter from Alibaba.com.
the motors these guys were suggesting were 24 dollars per motor
i was not amused by that
one tiny lock would take 2 dollars to cobble
Yeah, I'd just use 50 cent motors like these tbh, and use 3d printed gear boxes: https://www.alibaba.com/product-detail/DC-Motor-3V-12V-12000RPM-High_1601196930571.html

www.alibaba.com
Dc Motor 3v-12v 12000rpm High Speed 130 Mini Motor Toy Electric Motor For Diy Toys Small Car - Buy Toy Motor
cheap Dc Motor
3v-6v Dc Motor
3 Volt Micro Dc Motor
small Motor
dc Motor Product on Alibaba.com
now you talk like a true engineer 
The costs must be cut 
then i proudly say my design sucks even for v1 if you use cheap shitty motors as much as possible
Actually, there is the noise problem though. The cheap motors make a noise when they spin at high speeds, while bldc motors that don't are around 6$ instead of 2
Cheap motors = neuro has noisy arms / is noisy when moving, and from experience with quadcopters, noise can get really annoying really quickly
SCHIEßE i forgot about that
damn even the cheapest bldc costs $3.50
what is this world
Well, if we need 1000+ motors... https://www.alibaba.com/product-detail/1503-1503A-brushless-DC-motor-for_1600946286773.html?

www.alibaba.com
1503 1503a Brushless Dc Motor For Drone - Buy Bldc 10000 Rpm Mini Brushless Drone Motor For Aeromodelling Kit,12v Dc Motor For R/c,Variable Speed Brushless Dc Motor Product on Alibaba.com
who's going to paay 850 
1000 motors in one buy 
mfw money is harassing me day and night
This one would be 100: https://www.alibaba.com/product-detail/Low-priced-1503-1503A-Brushless-DC_1600963508229.html

www.alibaba.com
Low-priced 1503 1503a Brushless Dc Motor For Drones Electric Fan Motor With 3.7v Permanent Magnet Cheapest Price Brushless Motor - Buy 12v Dc Motor Brushless Motor 3v Brushless Motor Brushless Motor Manufacturer Brushless Dc Motors For Sale Brushless Motor 800kv 12v Brushless Dc Motor Drone Motor Variable Speed Brushless Dc Motor
motors Drone
bu...
There are others that claim bldc/brushless, but that might be a mistranslation or false advertising, since the pictures look like normal brushed motors and don't have the brushless designs
that's still.. doable
Honestly, it could be worth it to message the different companies asking for prototype motors for a smaller cost. Chinese companies usually respond to emails (might be because we'd be one of the few people emailing in English so we'd stick out in an inbox)
i guess
however, you guys need to do it, because alibaba is banned in my country lmao
ah, darn
I'm awake, what did I miss
i could however ask my dad for contacts, he works corporate banking
(I found some bldc motor drivers on mouser too, and it doesn't seem to be much of an additional expense for the different motors. I think some were also around 50 cents)
We're searching cheap enough brushless dc motors for the fingers, i think
Yea, we're trying to cut costs for all the different actuation in the forearm
we tried improving your finger design because money
aka apply hacks
we're doing this only for v1, because no money
your design is nice, we might use it for v2
(v2 assumes we recieve funding)
ight, its past midnight, im sleeping
The motors were cheap
night

Stepper motor diameter: 8 MM
Height: 8.2 MM
Type: Two-phase four-wire
Long axis (blue: A +, black: A-. Red: B +, white: B-)
Short-axis (purple: A +, yellow: B-. Orange: B +, green: B-)
Phase internal resistance: 39.2 ohms
6 V short-circuit current: 0.14 A
(Estimated phase voltage is 5V-...
They're so tiny 
They need to fit in the finger lol
Yeah, i know. I just find them cute
They are cute
it doesn't list the price for me
$11 for 20 motors
I mean, in finger motors are going to be functional, just really weak... or really fast because motors are fast
However, moving those steppers into the arm and gearing them down, joining them for more torque, or adding 3d printed linear actuator screws onto them could work...
What's the rpm?
They're stepper motors
Yeah. Max rpm
I'm looking
1step/pulse * 800pulse/sec * 18 deg/step * 1rev/360deg * 60s/min ~= 2400 rpm
what
Heh, probably another mistranslation
Slower than a turtle
i think thats the same website it is mistranslated on
I think a 1:20 gear reduction could work, maybe even 1:40. 40 would only give us 0.016 nm though, and finger up/down motion would be about 0.5 seconds
Gn
night
(hmm... double checked with pinch force and finger length, and 1-6 newton meters is actually about right... only need 100x that motor)
Okay, well my other design was way more complicated...
Imma work on finger v2 today
Or I guess...
Hand v1
Hmm... longer motors in the forarm could work with 10:1 or 100:1 gear reductions. Would be more expensive though...
I have an idea, it's just very complicated
But much cheaper than what you're thinking
sounds interesting
(btw, BLDC apparently has the best thrust to weight ratio by far if we can get them)
we would need an encoder
Four actuators pull on all five fingers; The wire pulled splits into four parts.
The other motors all have important roles for fine dexterity that are multi-purpose, therefore cannot be replaced by single rigid motors.
It's easy to think "Oh we can replace x muscle attachment because we don't need it to perform action x, y, x, however there is always a hidden purpose."
For most joints, for example shoulders that can shrug, or ankle which can rotate or pull on parts of the foot, we can abstract those motions or lose range of motion without massively impacting fine dexterity.
However for the hands, the same can't be said if we want human-equivalent dexterity.
Therefore we need to replicate every muscle, and do so with at least 10nm force per muscle
idk about 10nm of force per muscle. nm is torque
Otherwise yea
for v2 yes, v1 doesn't have that level of funding
1000 for arms is worth cheaping out in other aspects of the design. However if there are ways of replicating the hand that are cheaper, we take those
for example hydraulics or pneumatics could be a viable option since valves are quite cheap
I think as long as we have one finger that works, we can say the rest would work and probably be right, and that would probably be enough for funding if we want that
oh yeah, apparently solenoids are expensive for some reason compared to some motors, so idk about 3d printed hydraulics/pneumatics vs 3d printed linear actuators/SEAs
yes so long as we can demonstrate full range of motion or potential for such, i think missing out on hands is a good option to keep the costs down until they can be funded
ah
I mean, the wire for them is cheap, but making 50 solenoids would be kinda tedious at best...
I'd be down to wind the wire
@ruby lagoon @red oyster @floral quarry






biology is complicated...
this is only one side
yep
7 muscles total on this side, probably similar amount other side, then there is like 2-3 hand muscles, that's the close to the 20 figure you mentioned
for both arms that's 40 solenoids or brushless motors
i sized these to the powerful for its size 1.7cm motors i found, which output 0.1 nm, that can be reduced down to 10nm with 100x reduction
depending on their cost, those could be a lot though
there isn't pricing on their website, they want us to request a quote via email
Yeah, if we need larger motors, it might be worth it to buy 1-3$ solenoids and have one large brusheless motor around where the bone would be working as the pump for the pneumatic/hydraulic system
problem then is space occupied within the hand
i also came up with a leverage system for these motors that'd likely fit, increasing strength for space
tbh I still like Shadow Robotics solution where the metacarpal bones are replaced with servo motors that do the finger wag motion
we have to fit 20x 1.7cm x 1.7cm x 1.7cm square volumes with gear reduction too
or 20x whatever actuation method we choose
into a space that's at most, 5cm x 5cm x 10cm cylindrical volume
i hate that solution, you CANNOT get enough torque in that size of package
just like tetris
hand closes with some extreme forces
For the finger wag motion? The servos would be much larger than the actual motion
think about it, rock climbers can hang from one finger
Ah, I wasn't talking about that motion
yea
i support that haha
yea, these muscles:


heh, almost got whiplash from that change in reaction
Why can't the human body be less refined 😭
how do we get a pneumatic chamber with 20 connector ports for hoses? LOL
we don't

yea... 3d printing is probably required for penumatics/hydraulics. And we might need to re-heat it or use SLA to ensure its airtight or waterproof
both the chamber and the 'muscles' themselves. Maybe the pump too depending on what's available
everything i've seen about 3d printing tells me it has terrible lifetime
it does
depends on the material. PLA is pretty bad for everything except prototyping. I think ABS is actually used in some products, and so is polycarbonate or other filaments. SLA can be similar to epoxy which is pretty good. Also, 3d printing can do some mold-making, though those molds won't last as long
yeesh

petg

go to bed
o yea, might be good for water related stuff
woke up for water, saw something terrible
immediately returning to sleep
im scarred for life
life tip: do not watch vdeos of heart surgery before sleeping
bruh
rip
gn folks
night
ok what about 10 per hand, then we use valve actuators for muscles, and two pressure chambers (1 per arm)
Might cost the same as 40 motors and gearboxes though

if the motors are £20 then that'd be £800
Huh. Hose connectors are more expensive than I thought
for gearboxes that's even more
this is a random hopeful guess, they could be even more costly
1000 pounds for hands alone is too much
pneumatics, despite the price of splitters, compressors, and valves, might ultimately cost less
hard to say tbh
we could make our own air compressor using a screw maybe

idk if it's to scale yet, still checking
a motor is simply a backwards generator, so this checks out. Ive seen good results using brushless motors to produce power before
Doesn't seem to scale, but it's a good reference anyway
Solidworks can't, so someone else will have to do it
😭 😭 😭 😭 😭 😭 😭 😭

What flow rates are we designing for? Small solenoid air valves can be really cheap (though unfortunately binary)


^ These look promising to control pneumatic actuation per finger
I think we all have different ideas of 'cheap'
I was hoping for 0.5 -5$ total per actuator
ty i had no idea where to find small ones
thats a tough price to beat
Yep, but since humanoid robots have so many actuators, you could multiply that by around 100. So 100$ actuators means ~10k$ just for all the actuators
for v1 we can settle for the 40 in the arms and the 20-odd muscles in the face
the rest can be large brushless servomotors
costly but not in terms of 'hundreds of small motors' purchase
O yea, and solenoids for the face might be best. Apparently electromagnets aren't too expensive on alibaba, and the face muscles shouldn't need to be super strong
yeah they can be very weak
irc facial expression muscles don't contract enough to visibly flex, because they're only moving skin
they don't insert on a bone and have almost no resistance or mass to move
the same will be true of our robot



Though theyre cheap, unfortunately you wont be able to get much flow control with solenoid valves
they tend to be pretty binary
if there are splitters that small, we can split two into one, and choose how many are open to double or halve force applied
the only way to find out is to test them when it comes to products like these without spec sheets
aye
tbh you could simply buy the cheap solenoids in bulk and 3D print your own valves
but Im not sure how much thatd cost

doesnt look like there'd be that much to print to begin with
Solenoid retracts the pin within that elbow to allow flow, and whether or not it leaks depends on the fitting
I imagine you couldnt have too much (or any?) interference fit or else the solenoid gets stuck


nice
I remember researching suppliers for micro solenoids for a project in the past and a provider I found sold actuators for 6 cents in bulk, Im trying to find it again
So it turns out both men and women have these donut shapes on their mouths.




we're gonna want to replicate this visually to have a believable face
most robots miss it out entirely
gl man
and ty


PWM control should work well enough. You should be able to position the solenoids instead of full extending/retracting them, and I think it would just need a half-bridge instead of the full bridge dc motors would need for backwards/forwards control
Thats a great idea, but my concerns are with continous operation of solenoids, don't the coil windings build up lots of heat without cooldown time? (though maybe its not a problem with solenoids this small)
Huh... maybe air/water seal some solenoid/electromagnet system so it retracts while maintaining constant volume, similar to biology. Should work the same for the muscles around the eyes I think
The windings can build up heat, but I think it's usually from going back and forth quickly rather than holding position, whether that position is half-way or fully retracted (T=L/R)
Huh... like the spur gears that are different on top/bottom, but planetaries... have you tested it? I mean, do the gears contact without intersecting & stuff in cad?
It appears to be a result of protuberance of the muscle inserts combined with skin and fat

looks intimidating but is probably easy to replicate mechanically
I think 3d printing some TPU and epoxying some electromagnets to it could work...
The softest TPU possible though (3d printing silicone is possible, but requires special printers), or you might need to add ridges so it can deform better
if we used this could we place an LED power symbol in center? lol

aye perhaps
we'll want to look at the properties of skin soon so that we could find a similar material
if not we'd use flat plating of equal dimensions and positioning
if a rigid structure is moved to seemingly 'deform' like a soft structure, it tricks the brain into thinking it's soft
o yea! That reminded me of something later for custom camers: https://fxtwitter.com/oldestasian/status/1886643136631386541

I've always wanted 3D printed optics for custom eyeglasses + binoculars, but the prints always turned cloudy after washing. Hand-polishing can clear it up, but the process sucks.
Recently we've made some progress on doing it fast with a common kitchen material — saran wrap!
I feel like that's much harder though. But it would be impressive
Yup. The easier it is to do, the more gaps and therefore the more freaky it is. A complient solid structure would need some form of suspension from actuators and might need to deform like origami.
synthetic skin research paper
epic
i've heard that using a lens as a master mold can work too
True, but this allows for more custom lenses, as long as they can be spin coated I think
nice
(Huh, I thought that would just be ballistics gel. I guess it's that and a lot more)
(liquid suspensions for skin models seem pretty neat!)







i think it has a very low melting point and will go off over time. Also the texture seems like it could be weird to interact with. Maybe if we found a really good gel???
thin silicon?
There's a silicone/polyurethane section in that large doc too
silicon is a bit too tough, it sits strangely on the skull
lemme grab some images





none of them look good
i looked everywhere but every single silicone skin mold looks horrifying
Might be nut-picking here. What were the materials for Avatar and that one animatronic severed head?
not sure, but even that was kinda 'eh'
Also I'm not sure the top right is uncanney, just ugly and bad lighting
part of it is the face geometry, but it's also because the material stretches weirdly
i think a gel or foam would look more like real skin
Well, can you find gel/foam face examples?
this is the best one i could find but at that point, too far towards realism

not seen any, looking currently
i think it's unexplored because people don't like an abstract face analogue
if we could get something more like this it'd be ideal. Though this does not reflect real life, it's just a (probably AI generated) piece of concept art

we'd need to find materials that can be shaped precisely, with high elasticity, light weight and deformable
silicone tends to be heavy and 'droop' as well as stretch in an unusual way since it's applied as a face mask instead of a sculpt
either way what i've seen of silicone, even with the best sculptors, makes me want to steer clear and find a better option
this is the closest thing i could find to possible foam representation. You can see how a less transpart foam would work well?

enough transparency to mimic the skin refraction as well

I feel like this is getting into materials science stuff that I don't know as much about
for now i'm going to aim for face mimicry using rigid plates that are actuated
but i'll keep foams and gels in mind
This is all geroglific to me, but it's interesting. Neuro would be so huggable with this
like this but with lines

kinda like baymax

Very adorable
i just realized that part of the problen with silicone is that it's not transparent enough or light enough. It creates harsh shadows that make the skin look very dead and unnatural. Natural skin absorbs and refracts light
foams and gels don't have this issue
Y'know, when you think about it, our face skin is kinda like foam because our skin is made of cells with cell walls and fluidy/jelly insides
Maybe foam filled with something could work best
Jelly foam?
jelly foam 
conversely the foam shouldn't be filled because it has inverse properties; Solid strands with empty pockets, as opposed solid pockets with empty strands.

which would explain why it looks and acts so much like skin
our skin is basically sand, but if sand were squishy
kinetic sand
if you look at the top shaded corner you'll see it basically has the same refractive index as skin, but also similar elastic and compressive qualities, as well as weight (very light)

so i think that it'd look very analagous
likewise because it's not heavy, it'd have none of the droop that silicone has
as people age their skin loses elasticity and droops more, the same appearrance as the silicone masks
meanwhile this foam is very elastic
NeuroPillow
Could work if we get a good foam. Might want some thin layer of something over the foam to prevent liquids from getting stuf in the foam though. Maybe something that can be sprayed on
It really doesn’t look like skin though.
does it need to look like skin so long as it looks good?
It wont look good.
I think it should be the right color, which shouldn't be too hard
It will look very uncanny.
maybe put some food coloring / 3d print resin coloring or something in the foam solution before making the foam
Maybe that orange one on the very far right? Something like that color?

nah
That still looks horrible.
we'd want the raw stuff and of the correct material
very, very thin cell foam, with skin color coloring in it, same way you'd color silicone
 gotta search better
gotta search better
i dont like that idea, i think it'd look too fake but also too much like it's trying to be human
with the uncoloured stuff it'd have more resemblence to a marble statue
I thought you said before you would like Neuro to have the chance at integrating into human society? This wouldn’t let her have that chance.
the material science doesn't yet exist for someone to say "that's human skin" any integration would have to be done through making her believably expressive without looking creepy or human
since we can't make her look identical to a human
but we can make her look human-adjacent like a stone statue looks human
(Still feel like these types of robots are good enough for that tbh)

It’s still a goal that can be strived for. It can still be done without making her too creepy.

BJB Polysoft Foam, how squishy do YOU need it?
BJB has a wide range of two-component water blown, flexible polyurethane foams that are designed to be user friendly. Choosing a foam is not easy to do off a data sheet alone. Here’s a great visual to help you determine the best foam for your project.
TC-266 3lb is our softest flexible foam. The c...
the lighter foams look beleivably like skin. Moreso than silicone imo and with more springiness to them
best material for that job i've seen so far
please recommend any that you find though because if we can go with a better one, we should
As long as it can be covered by another material.
what material would look more like skin than it though?
Honestly, silicone looks more realistic but there will be better alternatives in the future.
The good thing about foam is.. that is very common and surprisingly cheap.
It can probably be custom made to match what we want, including color and porous levels
Also, makes neuro huggable
Im assuming the skin will be seperated into panels / regions to remove any mechanical resistance during movement?
One color or shade wouldn’t work.
Part of the art is in making the skin. I was going to literally going to take classes for this purpose. It would be a life goal.
 So... we should go with the whitest one so it's easier to paint over it? Like a blank canvass?
So... we should go with the whitest one so it's easier to paint over it? Like a blank canvass?
Honestly I feel the best option would be self healing polymers, even if the foam is strong it could still rip.
self... healing..? Now that's another level. I'm interested.
Self-healing polymers and self-healing elastomers are currently being researched as an option for skin in prosthetics.
I’m a sculptor, if I could learn how to make this into an art form, this could be where I contribute to the project.
Helping to make an android has been a dream since I was a kid tbh.
Consider your dream a reality. This is no ordinary android and we're not making it for an ordinary AI.
As I thought, this is not a matter of "If", but a matter of "when".
And that "when", is basically now, because we're putting so much effort into planning it
I also believe that AI will have the potential to vastly increase the rate of progress in material science, possibly within a decade, especially in regard to medical applications such as prosthetics. Creating an AI that does this is a goal for companies like OpenAI.
So there will likely be more options in the near future.
Although I agree that the V1 humanoid robot shouldn’t have looking human as a goal, first we just need to make something that works.
I've been on top of the AI research and OpenAI's one of the slower ones now. I think NVidia is good, though the most interesting research seems to come from random universities everywhere
Yeah, universities are where most of these developments are made, I just mentioned OpenAI as an example since using AI to advance science is a stated goal by them.
Ah, fair
Can we add a gyroscope to a motorcycle and teach neuro to drive one?
yes
Hmmm
I've been braining for a while and got nothing new
We need more people with individualized skills
@ruby lagoon how's that summarization/skill finding ai thing going
ehh...
That bad eh
I think I talked about a bunch of different subjects, so the skill directory includes me in a buynch of different places, then Matthew, then a few others.
idk, I guess I'll just post it and ppl can suggest skills the AI & I listed (suggestion mode should be on): https://docs.google.com/document/d/1rbjfbVYhFqKnM_PiybnRFu_ikKArPxsPAB94FAvkArM/edit?usp=sharing

Google Docs
Skill Directory Technical Skills Simleek Electrical Engineering PCB Design Alel Simleek Uninterruptible Power Supplies Simleek Motor Control Simleek Sensors Simleek Arduino Simleek Mechanical Engineering Gearbox Mechanics and Servos Simleek Freecad Programming Simleek Programming Python Simleek N...
Showing some favoritism I see...

Anyone should be able to add their own skills to that skill tree on the first page or two
Ah, that recording.
Idk, the AI kinda just made skills up somtimes I guess
I could try stealing people from general rather than just NN, what do we think we need?
Actually, lemme think...
- Electrical Engineering - The robot battery UPS system specialized for high power output is experimental, and new motor control systems may be needed
- FPGA programming (open source toolchains especially, and avoiding ITAR problems) - controlling so many motors and getting force/sensor feedback should be cheaper with FPGAs, and bi-directional BLDC motor control may need it
- FreeCAD designer - I'm mostly using FreeCAD for programmatic CAD and still don't know how a lot of stuff in it works, and getting feedback on the plugins I'm making would be helpful
Cad is easier with my multi-thousand dollar software
bet
Try making working planetary gearboxes that are as small as possible
I didn't choose FreeCAD because it was free. I chose it because it supports Python
As small as possible
ratio 4 could work as a test, with 10kg cm input torque, so 40 kg cm output torque
height of 1 cm
Looks like the diameter is 3.7cm if I use a s:6,P:6,R:18 gearbox with 4 planets, and make it with TPU (coating or full)

Still need to connect the finish button to the auto-generate script though. Also the image diagrams keep disappearing from the qtdesigner generation
is there a shaft diameter calculator?
Nope, haven't figured out the shaft/key stuff yet. I feel like that will have to be different calculator that will cut into the gears
(the planetary gearbox, somewhat manually entered)

the shape is so pretty
Yea... the ring's kinda thin tho...
a bit yeah

Can you export that as a cad file?
yep
Send to me if possible


(double checking the obj opens in blender...)
Works!
It might have converted millimeters to meters though. Not sure
Fixable
divide by 1000
(Ah, oops, it should've had 4 planets... I messed up the manual generation)
All that said, I still use OnShape/Solidworks sometimes because it has a much better UI
I'm Finally heading home
Jesus Christ on a motorbike you guys discuss too much while I sleep 
I ride a motorcycle, that's why I thought about it
Based, which one

Yes, but obj allows me to do other fun stuff
?
More precise measurements
Huh

It is now solid

{kind=link}
{kind=link}
Was it split up in the obj or one mesh like stl? I just clicked export so I have no idea
5 meshes integrated together, I had to isolate themm, rather difficult

Anyway
Diameeter of 35.42 is rather large
35.42mm. smaller than expected...
yes
The module should be right. I didn't connect the ring thickness with my gui though, so I think I was adding 2 whole modules worth of thickness while... honestly I need to read what that freecad.gears thickness parameter is doing exactly and see if it's based off of pitch circle diameter or what
Gotta fix my code some more...
Back
hi
hi
I've been doing research into solid state batteries and they are an attractive option if we end up having time for battery testing and prototyping. We can very likely design our own using non-toxic materials.
Also maybe i'm crazy, but can't we use compressed amorphous metal as a high density battery? If we squish it using a one way screwing mechanism, then when we unlatch the one way lock it can drive an escapement that creates constant power. It's the same phenomena as lithium ion or solid state batteries that are effectively electrically-operated springs.
I guess so... your idea seems good
https://youtu.be/LmA3PBEyu3g?si=2VPc8KxwFMvjWUiY
Bulletproof neuro

I put my high-strength armor panel to the test! Built from my custom-engineered Steel Lattice, originally developed through precision 3D resin printing and ballistics research. This bulletproof plate successfully withstood multiple rounds of jacketed .300 Winchester Magnum, 1 oz 12-Gauge slugs, and numerous other high impact calibers! This brea...
They just developed a material that's stronger than kevlar too
Idk if it's that or not
I just remember reading about it
i like that he goes right into it
"I'm not into this clickbait crap"
Discover how compressed air energy storage (CAES) works, both its advantages and disadvantages, and how it compares to other promising energy storage systems.
compressed air energy storage is another possible energy storage method
however the downside is that either neuro would be dependent on an external air compressor, or we'd need to make our own air compressor inside her torso that can be driven by a burned fuel
Also the best storage requires huge pressures and therefore we'd need to design a very durable pressure chamber for her.

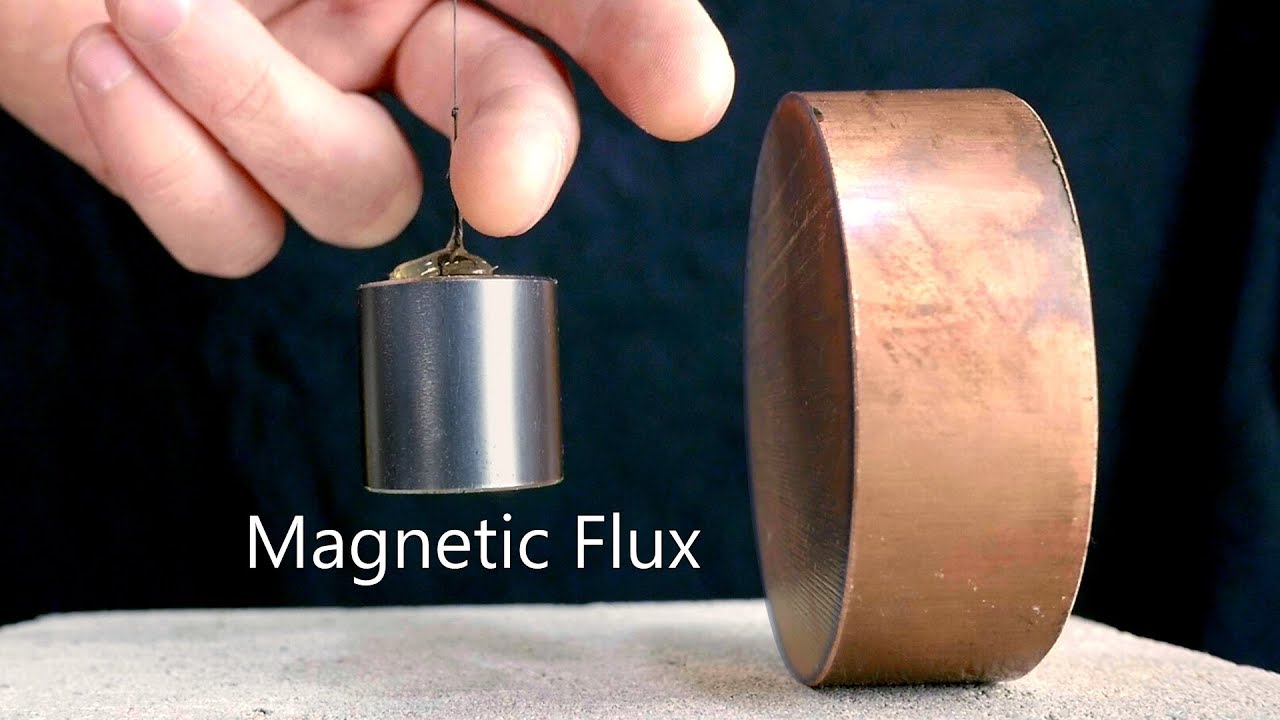
In this video I experiment with Lenz's Law And Faraday's Law of Induction to generate electricity and magnetic force fields in copper. Check out my sponsor Brilliant for a really fun way to learn! https://www.Brilliant.org/NightHawk
To read more about Lenz & Faraday's Laws see the following links:
https://en.wikipedia.org/wiki/Lenz's_law
http...
If this works, we could stay out of the inevitable loss of capacity of lithium batteries
I think we can only avoid wear/loss of capacity/breaking down by operating near zero kelvin. There's sometimes zero friction/resistance there so no cause for wear
If we were making a robot body to walk on Pluto then maybe
Push it to v14 where neuro becomes ruler of pluto
of the various battery options I explored, solid state batteries look the most practical
They are very similar to the compressed metal battery, except there are less moving parts and the pressure is generated through charging the battery, and expelled when discharging the battery
materials such as lithium metal, graphite, sulphur, and various types of solid electrolytes such as garnets, ceramics, and glasses are used to make them. So other than possibly rare or harmful solid electrolyte materials, creating them should be somewhat simple
Excuse me are we inventing a new kind of battery now
the main thing is ensuring the lithium ions can travel through the solid elctrolyte
for the compression battery, yes, because i cannot find any information on this kind of battery ever being discussed or attempted
maybe somewhere it has been, but i cannot find that anwywhere
Your tactics confuse and frighten me, sir
Typical neurobot project activities
it's based off of the physics of spring-based batteries in watches, but attempting to improve energy density to match lithium ion and solid state, which have no empty space in the material of the battery, so have better compactness
I'm watching a video on ss batteries
the batteries we use to day are based on compression and relaxation of the material when lithium ions move through it
wheras the proposed compression battery uses an external force
If this works this has to be one of the most absurd reasons something has been invented
Yes 😎
Right up there with making potato chips out of raw spite
This is actually me in every other conversation in this thread
https://amorphology.com/technology/applications/
https://www.tevema.com/improving-technical-springs-high-entropy-alloys/
https://www.tevema.com/applying-springs-design-principles-in-novel-systems/
https://www.tevema.com/technical-springs-game-changers-in-energy-storage-harvesting/
https://electricityforum.com/td/energy-storage/compressed-air-energy-storage
https://www.youtube.com/watch?v=jVoRoK1u3Dg
Description: Delve into the use of high-entropy alloys and amorphous metals for enhancing the performance of technical springs.
Learn the core principles of technical spring design as they apply to novel mechanisms and systems for enhanced performance.

Discover how technical springs are utilized in energy storage and harvesting applications. Learn about materials, design considerations
Discover how compressed air energy storage (CAES) works, both its advantages and disadvantages, and how it compares to other promising energy storage systems.

Which is the strongest pure elemental metal? Titanium, aluminum, copper, iron, tin, tungsten, magnesium, bishmuth, gold, silver, steel or brass? How many tons they can take? We are going to test that out with our 150 ton hydraulic press and 150 ton force sensor in this viral compilation video. Don't try this at home! we are profesional and all p...
oh nice
Nice, 500 is in the upper bounds of energy density of various tested products from companies

So the issue with SS batteries is they don't have the same ability to maintain dendrite growth
Cuts down in battery life until the problem is solved
And also, dendrite reaching from anode to cathode = kaboom
glass batteries have no dendrite growth so might be a good option to look into
can't remember what garnet oxide electrolytes were like in terms of dendrites
Oh, those use graphene right?
nah for solid state
The glass battery is a type of solid-state battery. It uses a glass electrolyte and lithium or sodium metal electrodes.
usus lithium or sodium anode
not sure what the cathode is
i don't think we should mess around with exotic glass manufacture so it might be best to source that material online
fairly sure solid state battery materials are sintered together

So one thing that might be worth thinking about is how long we want neuro to run for and how often. If she's only running a few hours a day, that changes the battery necessities than if we want her active 24/7
2-4 hours biweekly max for v1 at least
yup, and another thing that affects battery life is efficiency of the walk cycle, actuation, and locked-position ballancing
depending on how efficient we go, and how long we want her active, and her peak strength, we can determine power requirements
the more power density the better though
for either smaller battery pack or longer range
(Y'know, if we didn't have to worry about safety and stuff, I feel like this project would be way easier)
(Then we could just use thermal-nuclear-isotope generators or compressed air that could burst and slice through any objects within a few meters, and it'd be just fine)
I'm down
biggest power hog is the motors because we have to turn energy into torque necessary to lift her body weight from one limb
This was a great build and I'm glad so many people got to see me reproduce David Hahn's reactor live on stream!
Streamed LIVE on Twitch at: https://twitch.tv/UWOSLAB
Twitter: https://x.com/uwutoowo1
Tiktok: https://www.tiktok.com/@uwos.lab
Edited by:
https://twitter.com/dour_knight
was just thinking about that
what a coincidence
While my gut tells me to assume maximum strength for power capacity testing I think that would hinder the finished version's ability to fight whatever superheros exist over in the uk (or wherever vedal lives)
probably a good mindset for this project
Let's not go nuclear for v1
v2 then
Sure
i was thinking we tackle fusion for v3
Micro Dyson sphere around a nuclear fusion reactor in v4, and a black hole radiation generator for v5
problem with magnetic confinement fusion for neuro is that the smaller the plasma, the harder to stabilize it is, so you require more energy to magnetically confine it - Meanwhile the existing best reactors still haven't broken even so i don't like our odds when using a much smaller scale fusor.
The biggest limit for hobby fusors is the grid they use inside the fusor, which melts, but a toroidal plasma tokamak style fusor wouldn't have that problem. however the fact that the bigger (and therefore more energy efficient) reactors havn't broken even means that there's no chance in hell of a hobby fusor using that method working.
The amount of hydrogen and pressure would have to be even more than in the big reactor and it'd need enormous electromagnets as well. Simply not possible.
The other approaches to fusion are all less promising than tokamac so there really isn't any way forward with small scale fusion.
Black hole radiation?
Do i need to say it again
ah i only know the barest surface level details about fusion
We're designing a robot not the U.S.S. Enterprise
😂 sometimes i wonder
Depends, maybe that would be easier because of the larger scale
And we'll let neuro pilot it
Damnit
Maybe i could learn to spin a stick really fast and fly
Probably could
Honetly I think black hole radiation and nano-portal stuff might actually be more realistic than small scale fusion just due to physics.
Apparently fusion's viability scales with the fourth power, so just making a fusion reactor the size of a country or planet would make it much better
Don't make me find adult supervision because other engineers clearly dont count...
plasma is more stable in the bigger reactors
So what you're saying is we buy mars and turn it into a reactor to power a human sized neuro bot?
yes exactly
Sounds good to me
there was a fusion startup a few years back that uses microwave plasma to shoot two plasma toroids at each other and collide at the center of an hourglass shaped reactor to artificially increase the pressure in a small area, but the biggest limitation for that is materials science. The reactor can be smaller but the walls themselves start to break down immediately because of the temperature and pressure of the collission
micro-robots could continually heal the chamber
Also, they could continually rebuild hydrogen bombs and the container of a giant pool of water
nice
The hip is a bitch of a joint for mechanical recreation
True. Same with the shoulders
I'm less worried about the shoulders actually, still difficult though
@opaque quartz your knowledge makes me feel like a fraud
The amount of knowledge this guy has is insane
His knowledge is very generalized for sure
I don't have that wide variety of knowledge
I only have my one specialty
Which is CAD
And my ability to learn new things very quickly I guess
Most people are specialized
Like you, there's probably one thing that you are better at than the rest of us
And im still in high school 😭 worst debuff ever
I designed a self adjusting basketball hoop for special needs children in highschool
We were making an ai powered election voting machine for the student council
What was the AI for?
But later it got cancelled because the school found out the elections were done through fraud (they paid every kid money to vote for them)
LMAO
Biometrics, verify the person voting, ensure no double votes and prevent tampering and fraud
Fair enough
The machine had a research cycle of 2 years but we dropped it after 1.5 because the elections happened and there was massive fraud
Like, they went to every, and I mean every class for the shiny resume stuff
Idk that a database that houses, analyzes, and compares biometrics is quite the same as an AI, but it's cool regardless
There was a camera to prevent tampering and fraud during the process, and it used a custom ai I wrote
Facial recognition?
I guess that is a basic level AI then
I guess
How large was the learning dataset?
My real ai work was when we wrote a fucking missile guidance system for a competition but didn't get appreciation because "you need to have an sdg to solve"
And the sdg we chose was ensure peace
The reason for a missile? Our previous president said "to ensure you have peace, you must have a bigger stick than the enemy"
Managed democracy!
And because the previous president was responsible for kickstarting our missile program
What about you folks
Send some funny stuff our way
I massively irritated a ai made to act like Julius Caesar by repeatedly saying "egg"
That's the only thing i got that's ai related
Nah, anything funny works
My comedy works best with context (see: most of my messages in this thread)
I'm watching tutorials about advanced Solidworks controls while I'm at work
I'm cooked
And also playing geometry dash
Nah, that's on my PC at home
I could wirelessly connect to my PC from work using my phone and work on cad rn, but that sounds miserable
Guys, I need ideas for an ankle joint
I have one, but too much friction
Unless...
Now that's interesting
A pinion gear with a radial rack gear
And the rack is mounted on a pivot point so there can be rotation on a perpendicular direction without misaligning the rack and pinion
@ruby lagoon thoughts?
Honestly I don't think the joints should be joined by gears at all. There's the problem of gear teeth breaking, pulling and slipping, pulling and twisting then meshing the gears at a point isntead of a line and crushing teeth, etc.
How else do you suggest we handle the heavier load joints like the knees and ankles?
use some sort of linear actuator and pull (and maybe push) on a connection point on some foot bone
And for the joints, use something like compliant hinge joints or, saddle joints with springs/rubber pulling the joints together
Also, human toes support 75% of the weight when stepping, that's a bit much for robot toes
Well, up to 75%
I think the way the skeleton is designed is actually really good, due to how much contact area the bones have when pushed in, and how cartilage & ligaments hold the joints in continually
I think motors or typical hinge joints may be better when there's only one axis of rotation, but when there's several I think the saddle/ball-in-socket joints are way better
(I mean, copy-pasting the skeleton might be kinda gross, but saddle/ball joints with springs/rubber around them would probably work really well if we use linear actuators. Also, it could be further improved by making ptfe caps to those joints and making some squishy containers around the joints holding gypsum fluid for its non-newtonian properties)
I think the knee is best driven by a motor purely for speed and force
It's a very strong joint
Ankle is fine with either motors or actuators, just depends on what we choose
Yeah, the knee is mostly a hinge joint, so that could work well. Though I think the motor would be in the upper leg and geared down and then the rotation turned 90 degrees with a bevel gear
The knee needs about 110° of movement, from fully extended backwards
There is no frontal movement there
I take that back, it's between 120 and 140
If we can hit 130+ flexion angle, I think that's adequate
And I think it would be better with a brushless motor and encoder rather than a stepper motor
Just for the power again
Work has this laying around

Yeah, brushless motors can operate at 24v or higher because they don't cause pitting in the metal due to sparks and are designed for speed unlike steppers, so compared to motors that operate at say 6v or 12v
Well, V=IR, and W=I*V, so v->2v means I->2I and W->2*i*2*v=4W, or 16 times stronger in the case of 6->24 volts. There are also 48 volt options for larger BLDCs
BLDCs can be really strong for their size
Yeah, I wonder if they have small enough motors for small joints
I think if ordered in bulk they do
Constar B0815 Mini Brushless DC Motor,Diameter:8mm Length:15mm Voltage:3.7v 5V Max. output power :0.92W Speed:8100-32300rpm
Finger sized motor
Need an encoder that size tho
Would be a custom PCB probably
You did that and you’re still in highschool? TF have I been doing with my life? 
Lmao, facial recognition isn't all that complicated
You could learn to do it pretty easily
Making an AI in highschool? Back when I was in highschool I just played video games and watched anime.
That’s impressive dude
Where did you learn to program?
might be too small for most stuff actually
Some of us are just nerds to a different degree than the rest lol
It's the biggest one that could reasonably fit in the diameter of neuros finger
So if it's too weak, motors are out
please do not put any motors in the fingers
Yeah I guess.
motors do not go there
Well, I guess if you want the fingers to spin or something crazy
Not when I get the real design started
Have we thought about small scale chain drive?
I think once maybe
Interesting
lemme draw my idea i had for the knee pulley real quick
Also, there is a reason that I bring up ideas, even if they are clearly not great ideas. Mentioning something could set off a chain reaction of thoughts that lead to a good idea, so I'd rather not miss that opportunity.
The amount I wish I could drop my job and make this a full time project...
True. My ferrofluid solenoid idea was bad, but I think the normal solenoids as face actuators that came from it might be good
very basic drawing. It uses a central motor side-on from the femur bone. It drives a bar on a hinge near the knee, which provides leverage to the bar. That bar slides a rail, from which pulleys connect to winches, which connect to the tibia. So essentially the output power of the motor is multiplied for the same energy requirements.
I'm thinking that in any situation we're able to, we should use leverage.


for the knee joint itself, we should copy biology and make use of the screw home mechanism for natural locking.
The screw home mechanism is a phenomenon where, due to the differrent sizes of the two ball joints in the knee, there is inwards rotation during the last 10 degrees of leg straightening. What this effectively does is change the angle of rotation so that gravity can no longer actuate the joint.
This allows the leg to be locked straight and rely on bone rigidity rather than muscle strength power when standing upright.
Here:


Without a form of locking mechanism such as a friction brake, or rotation of the joint, the range of the motion massively decreases due to how much energy is spent holding the body weight of the robot 24/7
in humans, the weight is carried by the skeleton
I'm not understanding how this will make the right movement or a controlled angle and speed.
Huh

reposted with arrows
the pulleys are connected via wires to a roller on the top rail
the motor drives the straight rod back and forth, but not 360, so it remains in its position of most leverage
the pulleys connected to the roller on the rail, pull on the tibia bone
the lengths of the pulley ropes are different, so that on the forward stroke the bone does not go far beyond 90 degrees, however on the return stroke, the tibia folds completely against the femur
hello guys what did i miss
we got plans for V5 now
Gearboxes + battery research + joints and such
i'm craving some toblarone rn
excuse me???
nice