#Neurobot-1000 3d model project
1 messages · Page 7 of 1
majority of motors will be based on these, other than the hips
(I'm trying to develop a 10-100x reduction in price for servos, since those seem to be the largest cost in making most robots)
yea
I assume we want to stay away from anything hydraulic?
Well considering all the math I had to look at, and the special 70$/month cad stuff I found for making accurate gears, I think most of the cost of those gearboxes is in development
So money has already been spent on the project?
Depends on the pressure. I still think hydraulic might be good for face muscles, fingers, etc., but the solenoids and systems for them tend to be expensive for some reason... maybe economics of scale
i don't believe so, unless you consider time money 
nope, no money spent here, yet
Okay, just curious
facial expression muscles are pretty weak so we can get away with motors without gear reduction
muscles of mastication are the beefy ones for the face
fellow Solidworks bro 
Yeeeee
np np, ty for the questions
Actually I think the motors get weaker with their radius, so face-sized motos would be really weak, but might be really fast
yeah
we'd want to limit their speed with code
if the code breaks it might lead to a funny/horrifying twitching incident
If we do anything with hydraulics, we could do artificial muscle technology
it'd probably just look like a neurological problem actually
so true
I feel like we could 3D print hydraulic muscles...
That'd be a cool avenue to tackle after we get a MVP design done
Would need a good printer
True. Leaks would be bad. I think shapes like this could work though:

Hydraulics only though, not pneumatics (pneumatics would need the ridges going perpendicular to how they are in that picture, and then it would get larger as it compressed the muscle, otherwise 1atm might not be strong enough)
Yeah
ultimately there's only so far we can go with motors to make the limbs have human likeness. Flexing of the muscles as seen in human bodies provides a better analogue, but the complexity seems pretty intense. We'd probably want to explore it at the same time we explore liquid cooling with hoses. One of the biggest drawbacks with hydraulics is that you need a system that's durable enough not to leak during limb actuation.
the force for the same energy can be far greater with hydraulics however
That's why I suggest artificial muscle for the face
Well, with hydraulics you have one giant pump motor powering everything, so every muscle, no matter how large or small, is powered by that one giant motor. So... it's really quite different just because of that
Could also use bands of nitenol with an electric current for very fine motion
face muscles are free to be weak, and they don't actually flex enough to be visible under the skin, so hydraulics actually have no benefits over motors for the face, unless we're talking about mastication muscles
Yea, for very small actuation that could be a really good idea
huh i've not heard of that
Fine facial detail specifically
can you throw me a link?
One sec
oh nitenol is that shape memory metal right?
Yes
45c, doesn't really say current needed though so that would need testing / other sources
that does save on space since we wouldn't need to stuff a motor into the bone of the skull
Yeah, I'm sure tests have been done before tho
True, just not that specific page
Also, 13$ for this 1 inch one, but that's a 3d spring, and you could just get the nitinol itself, and heat it up around 525c or so into a more flattened spring while using less of it to record a new shape
however one concern i have for nitenol is fine dexterity; A benefit that made me choose brushless motors is the absolute fine control you can achieve over actuation speed and the ability to program complex manouvers into it. This would be a key component of achieving a passable human face and is worth the extra space necessary to house the motor inside the bone
With insulated nitenol bands, we could emulate actual muscle fibers too
Oh, right. The main problem with nitinol, other than cost, is that while you can heat them up for actuation quickly, cooling them so they can loosen can be a problem
Opposing bands could limit that, but not solve it
Oh, interesting, stretching them cools...?

Interesting Engineering
World's first refrigerator cooled by artificial muscles, composed of nitinol, a nickel-titanium alloy, introduced by researchers.
I might be wrong about the cooling problem
It seems that as long as there's enough insulation between the nitinol wires, having opposing muscles will allow one nitinol wire to both stretch and cool another
That's actually perfect
There may still be some cooling problem overall due to energy loss, but it might not be as much
Not enough to overpower external air temperature
i'd love to do some research into nitenol fine dexterity; What's the temperature range within which it extends and to what length does it extend to at each temperature? We'd need to know this in order to find out how precisely we can control them. Because especially for the face, we need perfect control over extension length and speed
Natural cooking will still occur
I think it depends on the specific alloy of Nitinol actually. Needs research
for sure
Ok i've mapped out most of the inner back muscles, almost ready to arrange motors in the back for them

talking about nitinol, the idea of using it is extremely interesting because it'd probably allow us to mimic the shape and biomechanics of a real muscle
that way we'd be able to assemble a more human-like neuro and save space inside the ribcage
Yep. Nitinol, hydraulics, and Series Elastic Actuators would all do that.
yup
linear actuators too
winch pulleys are good for torque but there's a lot of empty space
Linear Actuators are part of series elastic actuators actually.
(Also, put this big spring into a more muscle like shape and surround it with a thin sheet of plastic... would be really muscle like)

I think with electric current you can control the speed of nitinol, and by running opposing bands with a varying degree of current, you could limit the length of actuation
yeah it really would
nice
deffo worth looking into
the maximum lifting force we're after for these actuators is about 50-100nm. Within that range is the most we'll need. Since that's the force output in each axis by human torso joints. The actuators would split the load, so would realistically need to put out less force than that in order to function.
What other niche technology is there that might be useful?
idk, I would say look over the design document, but now that I look at it, it might need some diagrams, even if they're drawn
Speaking of, should we accept my changes to the design doc, or is there anything that needs to be added to those large changes?

Parallel Pre-stressed Actuators (PPA) are solid-state linear piezo actuators. They use an external frame to preload the piezo ceramic stack which improves its reliability and dynamic performances. The PPA developed by CTEC are more compact and display a much better dynamic behavior than conventional Direct Piezo Actuators.
Discover our range of...
speaking of piezo, we could install plates to torso, thigh, shins, and feet to extract energy from gravity
this would extend neuro's range
Those are usually for a specific frequency. They can be good for cooling without fans though: https://www.youtube.com/watch?v=Rn6qVv9HzHc

Go to https://squarespace.com/actionlab to get a free trial and 10% off your first purchase of a website or domain.
Checkout the Musou Black Hole painting here: https://etsy.me/3wErUa6
Shop the Action Lab Store: https://theactionlab.com/
Twitter: https://twitter.com/theactionlabman
Facebook: https://www.facebook.com/theactionlabofficial/
Ins...
not sure about it, since the prototyping of each 'part' can be done without an overall checklist for some finished neuro body, and an assembly of various prototype parts would only need to check whether the parts function in combination. So i am not sure if having a checklist for a prototype model is the right approach - or at least if it is, the checklist should be more specialized for checking that the prototype functions.
Maybe we could have a checklist for each 'limb', or, we refine the prototype's checklist to make sure it's checking success on exactly what we need it to check the success of.
oh nice
A checklist for each 'limb' might be good. Robot arms are often entire projects unto themselves after all.
Yeah, I think limb is the way to go here
Then it's just a matter of adding connective joints between the limbs and ensuring communication
We do each limb one by one, then once we have all the parts, we can summon the Neuroxodia

For a short while neuro is going to be a talking head... And it'll be hilarious xD
So we would have 2 legs, 2 arms, one torso, and one head? Or do we split that even smaller to make more manageable projects?
Like separating hands from the whole arm assembly
Honestly, I think initial head, arm, leg, and torso should all be manageable projects by themselves. For things like hands with fine dexterity, those should be on the 2.0 version
we have to announce that we summon exodia when the combine them into the prototype
So, arm should be a manageable project, arm with hand is a mangable project to improve the previous project, etc.
imo, we leave it flexible based on future requirements
makes sense, it also means there's no time crunch for certain parts if they're later than others (in the prototype versions). We can also swap out and test more complete arms later.
ah right i forgot
np
So the only issue I'm running into with nitinol is how to convert it's movement into contractive and expansive motion without adding too much of a size increase
A spring coil does the job, but it's bulky
I want a better way to achieve the contractive movement
I think you can squish the spring coil, or even do a 2D coil
how thin can each spring go whilst maintaining useful nm of pulling power? If necessary we can stick two thin springs next to each other
Honestly, with the rate that we’re going with humanoid robot development, lighter and longer lasting batteries will 100% be better within a few years. They’re a priority for humanoid robots.
wait. a 2d coil?
same idea
flat spring, zigzags
how thin is it to be called 2d in the first place?
2d coil is intriguing
2D coil:

Usually used in heating, wouldn't work well in normal springs, but I think nitinol could work with it
yeah since it tries to return to wound shape
I play pot of greed, which lets me draw 2 additional cards!
:pulls out left arm and left leg:
Then I play pot of greed which lets me draw 2 additional cards!
:pulls out left arm and right arm:
Then I play pot of greed which lets me draw 2 additional cards
:pulls out torso and head:
I summon Neuroxodia!!

Yeah I was thinking this tbh. Like cute anime robot ears.
i swear i read that you can use an electric charge to wind and unwind nitanol
am i going schizo?
We could theoretically do an accordion setup with thin but wider bands for more power
You can
surely then we only need the one spring per muscle
Yeah
gonna check if we can half-wind a nitanol wire with specific currents
Oh, right, for signal receives, we should keep them detached with photocouplers so that if there's an EMP, like a neurobot touching a doorknob in the winter and a zap going off, it doesn't fry stuff.
That static zap going off near wherever the radio antennas are could actually harm stuff
And photocouplers can be around 10-30 cents per coupler anyway
Chat gpt aaah copy paste website. Gonna fact check this bruh

Is latency between parts going to be a noticeable issue? Or will most latency come from neuro herself?
Well there are atomic batteries being made this year that should allow for 1W of power for 50 years. So if we combine a lot of them we should be fine
That's a decent amount of power
How heavy would they be? Too much weight for a humanoid robot is a problem because they prioritize balance.
Well they're small 15x15x5mm
So not too heavy I guess
I think we need higher watt for shorter periods though, motors are power hungry in short terms

fr and another benefit is that you don't have to mess around with maintenance in the same way you do brushless motors
There is, current control
apparrently you can choose precise limits
Just make it small enough and it's impossible for it to have a dangerous strength level
control how far it extends for example
Yeah, but wouldn't it be a problem for example if she wanted to give a handshake. Wouldn't she crush someone's hand unless we put sensors there to limit her?
Mentioning nitinol was my best contribution to the project
Actuators are essential components of motion control in systems of all sorts. Typically there are two types of actuators: linear actuators, such as solenoids and hydraulic cylinders, and rotational actuators, such as servo motors.
not much info here about precision
We can limit it
gonna keep looking for info about precision nitonol actuators
Oooh alright
Yeah she would probably need sensors in the hands
nitonol in the context of an MRI machine switch. I wonder if they go for the heat option becasue they don't need fine dexterity?

Force sensors could be placed all over the place with minimal power draw. Hardest part would be data analysis
Cause with motors we can just lower the torque to make it safer
by V3 we're just going to recreate the human body 1:1 arent we
We're just going to steal someone's body and put a pc in it
tbh that wouldn't be too hard. I think if we add 'desired sensor states' and feed back from that, it can be thousands of times faster than normal RL since it's trying to match thousands of signals at a time instead of one at a time
Nitinol when powered by electric current can be variably controlled. There is a set current where it starts motion and as you increase current it gets stronger. By managing that current, we can emulate muscle contractions extremely accurately. With opposing bands of nitinol, we can further limit range of motion, rather than just speed of motion
The system that's making the 'desired sensor states' then is the one limited by normal RL (this is basically just model based RL actually...)
still no info on precision movements other than a single chatgpt generated article
pls send me any links if you guys can find reliable info on it
i hope so. If we can do that, i'd say go with nitonol 100%. It's also more easily assembled into hundreds of actuators than servo motors can be
I don't think there's much research on nitinol based artificial facial muscles
true but so long as they have good precision we can use them for that application
i'm imagining with electrically controlled nitonol, we can add current for x time period to achieve the desired shape change length
or x strength of current
i hope it works like that anyway
gonna try find more info on it
I had some nitinol, though idk where it is now.
I have an electric smelter that should go past 525c, though idk how accurate it is
I have a cnc so I could mill some wood, graphite, or metal to put the nitinol in so it keeps that zig-zag shape in the smelter
Hmm...
all the same page 😭

Seems like something to look into
tbh I'd rather mail all that stuff so someone else could work on it while I finished my gear code, but I think just milling the cnc file, sintering, running tests could be something pretty easy I could do while listening to audio books
the thicker the wire, the more loops, and the lower the internal diameter of the spring, the more force is output
this might be an energy efficient path to high strength for neuro ngl
True, but nitinol can be pretty expensive, so it might be better to only use it for small actuators
If I had extra money, I'd just buy the stuff lol
Neuro V1 at least
I mean, it was 13$ for a tiny spring. I imagine it'd be something like 13k$ for a bicep or quadriceps actuator
maybe later version would have higher budget and can expreiment with full conversion to nitonol
A successful neuro could lead to big funding grants
^^
for now one benefit of brushless for big motors is the ability to use disk break to stop rotational motion
Honestly, a successful neuro on the level of robotics we're talking about could make us world leaders in robotics...
Stranger things have happened though
we'd need to figure out another braking system for nitonol. Maybe nitonol is the brake, simply due to the fact that it's 'rest' state is constant
i.e it's not exerting energy to stay in one pose whilst under load
It's only moving due to an active current or inertia
Inertia won't be a big issue due to friction
exactly
could literally just use 100% nitonol, no brakes, and achieve perfect resting efficiency regardless of the pose if the springs are beefy enough
ig it depends on how much weight deforms the spring
Yeah, that is true
it'll spring back due to its lack of permenant deformation, but this determines how stationary she can remain at high efficinecy
Maybe if we make the nickle titanium alloy ourselves. Then it'd be less expensive.
Btw, updated my changes to the docs. How do they look?
I think the nitonol actuators actually don't produce that much force
Nitinol "tubes"
Hmm...
Lol
ah
lets slap some of the old requirements back into v1, other than that it looks perfect
Sure.
...which old requirements?
I think you can edit my suggestion... maybe
To make raw nitinol, suppliers melt pure titanium — in the form of sponge or top-shelf crystal bar — with pure nickel. Titanium has a melting point around 1670°C, while nickel melts around 1453°C. Those are some of the highest melting points among metallic elements.
Do I hear arc furnace?
Yep, sounds like I'd need a homemade arc furnace and probably either nitrogen gas or some noble gasses
i forgor. It was stuff that was migrated into the prototype versions, such as passing uncanny valley, human-like full locomotion, fine dexterity of the hand, etc etc
Oh, I was thinking of "in addition to all of the previous requirements"
ig speak and hear, stuff like that
Passing the uncanny valley is a hard requirement though.
was present in the old version but i missed copy and pasting it seconds before it was changed 😂
yee
oops
Ah, I just added that
Holy hell, that's gonna be difficult
I didn't even think about that
Yea, that's why I moved it to the 2.0 version. 1.0 version just has 'don't look creepy or move in a creepy way'
Well Vedal technically was thinking only about a bipedal robot
We want to create Neuro as a robot
So yeah
I wonder if vedal has read this thread
Yea, we're kinda going overkill for a bipedal robot...
No
Nothing is overkill if it's for neuro
true
True
We need a really good quality speaker on the bot so she can sing...
We're going overkill for Vedal's expectations
Plenty of good speakers on the market
It's not a problem
I'm an audiophile, I can cover that one
Tbh, even a relatively 'minimal' robot like these ones from Stray would be on the level of a top robotics company:

...I still like their screen faces tbh, and cameras at the corners could work...
They look cute
We can surpass that
We can, but I think it's decent for a 1.0 version so we can have something to show before we do a ton of stuff
Yeah
im back, for a short time
I have a good idea for the audio system. What if we did multiple speakers with different specialties in different locations of the head to emulate the separate sounds made by the human body in speech
Like having more bass heavy speakers lower in the neck
And we can isolate audio to individual speakers to get a more human sounding voice
Oh, right: a while ago I had the idea to put a large speaker in an air sac and have a tube going from that to the mouth. That would also allow for breathing and exchanging air for internal cooling fans
Speakers are small and the nitinol usage has made a lot of space available
Have you guys seen the new Omni gears made in Japan?

This article presents an active ball joint mechanism (ABENICS) enhanced by interactions of spherical gears. The gear-based joint drives three rotational degrees of freedom (RDoF) without slippage. The capabilities were inspired by the unique interactions between two different innovative gears [the cross spherical gear (CS-gear) and monopole gear...
i am not only talking of the loudspeakers, i am speaking of the electronical components and bateries, also cables, and that is only the beginning of the list
Even small nitinol actuators require a lot of power actually
O yea, I tried making a robot arm out of one


That's when I found out just how weak those servos would be...
The sphere gear might be great
we have to think practual
 There's so much stuff i had to read. You are all cooking
There's so much stuff i had to read. You are all cooking
the easiest solution is at the time the best right now
Estimated power draw?
Hard to estimate, because it depends on the thickness of the wire
30W
What is the retraction period?
3 to 4 seconds I think
You have unlocked new role
But it's hard to estimate
Damn, That's slow
Because current is different depending on the wire width and voltage depending on the speed
So I'm more of estimating than having actual values
Right, thinner nitinol wires might be much faster actually
... maybe arc forging some nitinol might not be a bad idea...
Actually for 9V 3,4A it might be about 320ms
Hard to say
Cause I have to use mutliple sources for the calculations
For 24V it's less than 50ms
but then the power usage is 81,6W
https://youtu.be/xpEcFYhZHN0?t=522
Okey, some video of nitinol running on AA batteries.
(Maybe it can work faster with higher voltage?  )
)
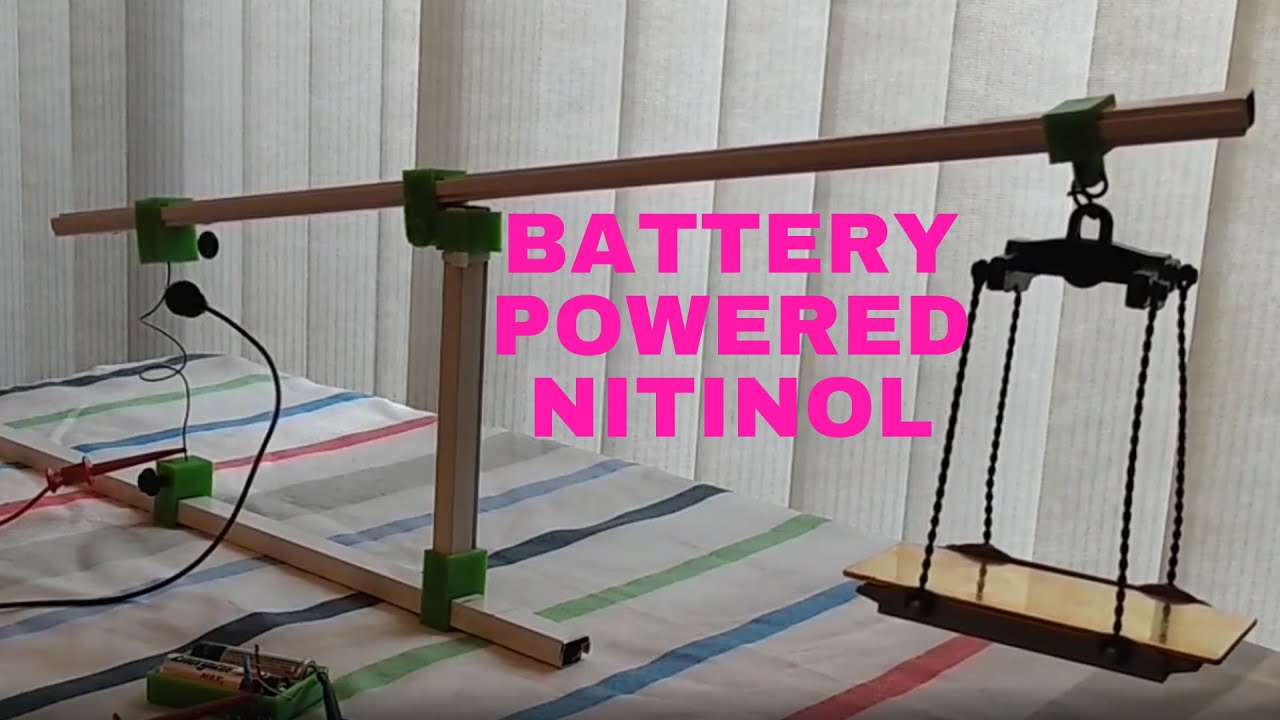
departedmessenger demonstrates how to use nitinol memory shape wire, specifically, shaping and actuation by electric current.
Music by LiQWYD
Midnight sky
Free download: hypeddit.com/link/ns6307
It works faster with higher voltage
nice to know
I just read wrong on one source which didn't provide the voltage they used
Ah, we might be able to SLA print some coils with side connectors, coat those in plaster/ wall spackle, put it in a forge with a coin of nickle + titanium, then wait
but with other source I found that 9V is about 300ms and 24V is less than 50ms
And 3,4A is used for wire 0,5mm thick
...or we could just extrude the wire too.


tbh about the same as a brushless motor of the same power, but in a thinner package so it can be arranged along the path of the muscle

Many spring
wonder if we could get a mod to point vedal to this thread after his break

I'm a professional chef rn
There first must be something to show speculation is nice but results are better ^^
Now that is one interesting ball gear design. First time I'm seeing it.
I can pull an all nighter working on a rough design of something if you want
Nothing final just a proof of concept
Anything specific you want to make a rough design of?
idk if pulling an all nighter is a good idea though
2d nitinol coil and a basic segmented arm
I do it several times a week
JESUST! Please, take care of yourself!
I think the nitinol coil would be more math than CAD design. We don't know what diameter of wire is needed, cooling/insulation, etc
A lot of cooling from what I deducted
It requires like 70-90C to contract
do not the nighter
I will the nighter of all
Guys I've been doing some thinking about nitinol wire:
If a limb joint has two nitinol muscles on either side of it, if one pulls on its own, the other side will resist that pull. So we would want to pull both muscles in opposite directions to create limb movement. However that made me think: unlike normal human muscles, nitonol muscles would produce force in both directions, forwards and backwards. So in reality the strength of the limb is not proportional to the muscles acting upon it in one direction, but rather, the muscles acting upon it in both directions, doubling the available strength of neuro.
Not only that, there are two useful qualities about nitinol wire that make it even more attractive. Number one, Nitinol wire is a linear actuator, which means that given proper sizing and muscle placement analogous to the performance of a human muscle of the same location, we have in-built mechanical movement constraints that prevent the extreme forces of the limb from tearing apart the body. Not only that, the Nitinol wires are reputed to be more powerful for the same amount of energy spent, so they are more energy efficient. Both of these factors make it possible for us to either: Increase neuro's travel range/time spent active whilst retaining human-adjacent strength, or increase neuro's strength a great deal compared to that of a human.
For example, I've been doing some research on nitinol wire diameter compared to strength of pulling action, and a 1 cm wire diameter yields strength in the 1000s of nm. For reference, an adult male human thigh bone moves with a torque of 500nm max. As a more specific example, a 2cm nitinol wire might provide somewhere in the range of 7000nm.
Another benefit of nitinol wire is that as a linear motor, it saves us space in the torso by being able to move limbs whilst fastened to the exterior of the ribcage. Furthermore, Nitinol wire has an in-built braking system because as a 2, or even 3 or 4 cm thick metal wire, it resists deformation.
So thanks so much @red oyster for suggesting this type of actuator
Yippee
the only limiting factor right now is cost of material, method of electrifying it, and how precision control works. If these three things can be sorted out, this will far surpass brushless motors for our usecase
depends on the specific nitinol allow. The one I looked at listed 45c, some list lower temperatures
Oh that's a little more managable
And again, deforming nitinol lowers its temperature naturally
we might want to look into how nitinol actuator manufacturers handle it
what kinds of alloys and how they get precision movement
if they do in the first place that is
we also might want to opt for hilariously thick nitinol wires with miniscule inner coil diameters. This way we maximize strength and rigidity of the limb in a stationary pose
the thicker a metal spring is, the more force of gravity it can withstand without stretching
in a standing pose we don't want any give
the only movement allowed should be muscle-based
so the wires should be rigid even when under 30+kg load
nitonol muscles would produce force in both directions
Er, no, pretty sure they only contract. The other side will cool if pulled. Same with pulley systems. Only linear actuators work like this, and the pushing force is kinda awkward with normal skeletons
Nitinol wires are reputed to be more powerful for the same amount of energy spent
I saw some claims of efficiency without anything backing them up on some sites... pretty sure they're lying. Linear actuators can reach pretty high efficiencies, but they can also get pretty low efficiencies, so some scammer can just claim it because they beat bad linear actuators
it saves us space
Hard to determine if it will save space when compared to larger actuators. Also they're more expensive so they may raise costs a lot too unless we make the nitinol ourselves. 2-4cm thick wire would be huge.
I mean, it will definitely be good for small actuators, but it's not a miracle material
In a standing pose, humans have to balance with fine muscle control, so that's not necessarily impossible to handle
all fair points
Ah, another problem with nitinol wires: if Neuro over-heats, all nitinol actuators contract
i swear some wire types had bidirectional actuation, unless that solely describes "they can achieve two states of rest"
two way shape memory appears to be about having multiple rest states yeah
(Btw I added image suggestions to the design doc so people can understand it more quickly)

nice
LMAO
those are so good
hehehe
Huh, doesn't require pull-back. It might have 2 shapes then. Neat
I don't even think there are wires wider than like few mm
And even if they were they would require enormous amounts of energy
ig we can do some weight lifting comparisons to see the energy efficiency per weight lifted on a motor vs a spring
Compared to their sizes, it might be doable. I've seen custom transformer coils (with very thick wires on them) used to create very low voltages and high amperages to melt any wires they touched before
Yeah, but the voltage sets the speed
If we make the voltage like 0.01V it will contract in a long time
Like few seconds or even more I guess
should be ok with leverage, but yeah a fast responsive neuro is ideal
ig muscles operate faster than that
I've seen only data tested with 9V = 320ms and 24V = <50ms
But then we can't allow for too high current.
Cause we will just lack energy to power it
So does the wire resistance... which would be low because it's thick in this case
We'd have to rely on current, and resistive heating is H=I^2Rt, so increasing current is actually better if we can do it
V=IR, so if R goes down, I goes up an equivalent amount to make V the same, and we have I^2 there
yeah we'll ultimately need to match the wire thickness to the required power draw and minimum allowable strength. If that thickness isn't enough to provide a natural brake for neuro, we would need to make one in addition to the muscle
but if we can get away with it it'd be very efficient to just have a thick wire and therefore, natural braking which allows standing in a pose without energy loss
Yeah
This is getting complex beyond current humanoid robot tech.
i bet untested nitonol actuators would lead to a lot of funny but irritating issues during development.
I also think we should cook on it long term and piece it together over time if it turns out it fits our project more than brushless motors.
Well, if someone can do the research into forging/drawing nitinol wires and recording their shape, the lifespans of those, breaking/strength limits, and cooling requirements, as well as the machines needed to make them, that could compete with my custom pulley/SEA system.
I think using a wire winder with different tube shapes, such as almost flat, would be a good idea for the nitinol, before encasing those and throwing them in a furnace at ~525c for an hour or so
I think this would be super cool if Vedal holds a meet and greet at the concert and Neuro fan can hug her irl
anyone know any neurons who are blacksmiths?
There was someone here that worked with metal, wasn't there?
Ohh. Both voltage and current affect the speed.
the idea of neuro being real brings a tear to my eye
Why is every website saying something different
It's so annoying to search through all of it
every website uses chatgpt now
Neuro could finally hug Anny
OP if you need a raspberry pi and in the US I can donate one to the cause
Yessssss
I can even take care of the programming and setup for you
this is page 4, page 1 through 3 were all the same. i didn't check any later pages. All were the same chatgpt article

I'm using a different search engine than google
So I'm reading different websites
But they all have so little info about the power consumption
😭
ig we'll have to test it ourselves sadge
From what I deducted both voltage and current are important for speed, length and width of the wire.
Or at least one of them is
And that amount of power we need grows exponentially with the width of the wire? But not speed?
Hard to tell
Cause so little info
Gotta talk to engineering professors or already know the sites to go to. Spam seems to be polluting google it seems...
I don't know at all about length because there is 0 info I found

Huh. This one doesn't seem too bad. 2.2 has some numbers and lists the equation I used, and also lists an equation for R given the wire shape: https://www.kelloggsresearchlabs.com/nitinol-faq/

Nitinol is the trade name attributed to the nearly equiatomic binary mixture of nickel and titanium,which exhibits SuperElastic and Shape Memory properties.
" If you’re not fortunate enough to be equipped with a precisely controlled laboratory furnace, a toaster oven does a fine job as well."
Okay that website's kinda awesome

According to this 1cm wide, 2.7cm long wire requires 263W, 987A to contract in time of 1 second.
either low lifetime, low load bearing, or low memory effect, choose one, get the benefits of the two others (well the last one doesn't mention how good the memory is, but hopefully it's not bad)
lol, sounds about right actually
Using R = rho*l/A we can calculate the approximate electrical resistance of any wire length or area (l = length, A = area), and according to google rho (resistivity) of Nitinol is 82 times 10^{-6} ohm cm. From this electrical resistance you can find how much heat these wire's will be generated
Concerning strengths of materials, it would be as easy as finding the shear and young moduluses of Nitional (E = 30–75 GPa depending on how much you anneal the metal) (V = 28.8 GPA) then plugging into some stress eqs and designing iteratively
Concerning heat trasfer, conduction is generally the one we should worry about the most (radiative and convection dont really apply), and finding the thermal conductivity coefficient k for Nitinol (k = 0.18 W/cm K) and some heat transfer eqs we can find how much heat we'll be emitting
Concerning manufacturing of drawing wires thats not my area
¯_(ツ)_/¯
But generally you want high ductility for drawing a metal into wire
Ah, we could also affect heat transfer by either coating it or putting it in high heat conductivity fluids near high heat conductivity metals/materials
So we basically get a walking heater
Neurotoaster
copper coatings are used a lot for nitinol
If the amount of heat from electrical resistance is high, and the thermal conductivity is poor in our Nitinol wire, then we would need a high heat conductivity material or fluid yes
The problem is these are created by a special company as it's very hard to combine nitinol with other materials apparently.
very true
And also this is another problem
263W for one small actuator.
that's actually better than brushless motors in terms of energy per nm
Ah, yea, we probably shouldn't be using 1cm thick wire for pretty much anything
Really? That's good then
especially not 1cm thick and 2.7cm long. That's more like a tiny brick
is the wire itself 1cm diameter or is it the coil?
wire
perfect
But as you said before we don't quite need such a thick wire as it will produce much more force than we require
it might be enough to have convection heat transfer via flowing air, but we can always run the numbers to see if something more than that is needed is dissipate waste heat
that's like 5-10x the performance of brushless motor assuming chatgpt wasn't hallucinating
So we could use a thinner one and stabilise it in a cheaper way
Thicker wire ---> less electrical resistance ----> less waste heat
chatgpt was probably hallucinating tbh. It hallucinated the math for some of the gearing I did a while ago
the brake method would need function alongside liniar actuator, a clamp pad on a metal rail or something
the bigger issue with brakes is how many linear motors per limb there might be
lol i fear so
that said, 1cm is very thick
yea
one option might be to use multiple coils layered within each other
that way the resting firmness is large, but the energy required is not so large
tripple check in different instances
Ah! Pulley system, of nitinol
Maybe
if we move only one or two
we could also line up coils
so a long coil made out of individually heated ones
pulley system too, multiple acting on one point next to each other
The nitinol might rub up against itself which could be bad, but we could coat/insulate it more easily than coating it with copper
the idea is, the combined mass of the thick coils is enough to make the limb rigid at rest, however, pulling individual coils might not be so energy intensive
yes true
Have you considered other braking methods besides disc brakes?
Such as band and drum brakes
or caliper disc brakes
abbrasion could be a problem unless they're fastened to frames
yup
settled on disk for motors since they allow precise braking at any angle
nice!
for these actuators, not sure what we'd choose
with so many muscles, something simple might be best
but mechanical brakes are limited in brake angles
Ah, if we use nitinol springs, we could coat them in silicone or other chemicals which could help spread out some of the load, and we may not need to coat the outside of the springs
Im assuming we arent going to have uniform wear for the brake pads then...
One thing i just realized is that nitanol probably only has one speed
so the actuation would need to be staggerred to slow the speed, which creates juddery movement right?
or can the speed at which current is fed change the speed of actuation
like a smooth slow acceleration
It should have different speeds by changing the current. However, PWM control can even be in the MHz range (though at that level of power it might be hard), so there shouldn't be a vibration problem there
excellent point if it's linear actuators with vairable stopping points
oh nice
excellent
That is something to note in a future maintenance manual then
If we can find the most kinetic energy a brake will dissipate, we could also find the temperature rise and see if itll be an issue
I think i'll draw the original planned motor design, but then work on a nitinol thick wire muscle variant
yeah; high temperatures will also actuate the muscles so we'd have to be extra careful about heat
don't want her accidentally punching someone
only "accidentally" punch someone
Send me the drawings and dimensions when you're done
both versions?
nitinol im assuming
will do
Preferably motors for now actually
Then I have something I can finish in one night
Nitinol will take much longer
🫡
Also this might be a good brake option

some sort of linear friction brake
one for each muscle though, that's a lot of mechanisms
You mean something like a shoe brake?

ah I misunderstood
the image i sent is a shoe brake that pushes into a shaft
there do exist pulley-based braking systems though if thats what you were talking about

Estimation for some random muscle? Width, length and contraction speed? So I can calculate how much power we need for one such muscle.
lets say 100nm to be on the safe side
length can be variable, not sure on that
width can be 3-5cm, up to you
By muscle I meant one nitinol actuator
contraction speed is about 3cm per second maybe
hmm i'll choose one real quick
I was about to write the length and width of the muscle, however, we'd likely get better use out of a muscle that is as wide as the human muscle, but shorter and thicker, so that it's more rigid and less stretchy.
full length is 36.5 cm long, 5cm wide (coil dimensions).
Actual desired length would be between 5 and 10 cm


you can choose an arbitrary size within that zone
Now I need to calculate the coil dimensions to actual wire size.
one option is for us to add a rope to the internal diameter of the coil, fastened to a brake, and then the muscle would be free to be as long as we like as the rigidity wouldn't matter. In that case you could make use of the full 36cm length
I feel like a nitinol torsion-spring-as-pulley-spool system could use up much of the space while normal spring nitinol systems would leave the large void in the center
i completely agree
the shorter the spring pulling the pulley, the thicker the wire can be, and the more strength it'd posess in a static pose
torsion spring btw:

They're used in bumper buttons like L and R in controllers
Hmm... maybe not torsion springs tbh,,,
ok this muscle is a pain to create motors for, the 3cm by 3cm block doesn't really lend itself to being attached from one part of the spine to another

I don't know if I understood correctly, but this is supposed to be a spring that is 10cm long and 5cm wide made out of a wire that is 1cm wide?
we can go lower diameter wire if the pulling force it puts out is equal to 100nm.}
But otherwise yes
( O yea, also found this for AI that could work on the Raspberry Pi: https://github.com/ogmacorp/AOgmaNeo )

GitHub
Arduino and Desktop compatible fast online/incremental machine learning system. - ogmacorp/AOgmaNeo
If we're doing muscles for the spine, we need a way to contract along individual spinal segments. If it's all one muscle, there's no way to get full unique range of motion
Well. If the answer is yes then we need 16,1 kW (1162V) of power to contract it in 1 second.
turns out in the human body, all of the muscle inervates when signals are sent to it, and it pulls on all of the areas where it attaches. So for us we can use a single wire pulley per muscle that splits to join the spine at the inserts
So I hope I understood it wrong
luckily the answer is no; We can go lower in wire thickness until the nm output matches 100
we'll simply have to use a seperate braking system for each muscle
that's some crazy wattage
if necessary we can reduce the dimensions as well
holy
2 foot tall neuro
nah muscle dimensions
We mean a coil like this that is 10cm long when contracted and 5cm wide?

Muscles are also basically batteries. If there are real problems with getting power to the actuators, we can add batteries near them so we don't have to deal with thick high amperage/voltage wires
since it seems to be insanely high wattage, we'd want to go thinner and/or smaller, so long as the muscle can contract the necessary length to mimic a human we're good
i don't know what that length is though
so we'd need to search it up
I still can't stream here or I would stream my cad software
Huh, there are streaming privilages?
imma head to bed soon
night
Rip

I'm at work for another 6 hours
I'mma join a ttrpg group rn
have a good time
must come with embed perms
It seems that to achieve any spring shape with nitinol wire we what as thin wire as we want.
For a 10cm long 5cm wide spring made with 1mm wide wire we would need 15.7m of length, but it would only require 1.6kW to contract in time of 1s
But I guess my calculations are not correct mostly because of the spring size.
As I'm calculating for 10cm long contracted spring
i think
Bet
How do all the new people keep ending up here
GD is like the 4th one
Must be the main character collection thing extending down to us
I just tested, I can stream my cad sooftware tonight
I love robotics, did it in highschool and for college
Just need to figure out a time to get everyone involved on at the same time (and get a ai to summarize main points so people who aren't there can know roughly what happened)
What is the scheduling for btw? streaming cad?
I updated mine
updated mine
One hour
Hmm... I just realized I could remote my AI into VRChat for training instead of a robot. Not even with complex controls, just wasd, mouse, and tensor->fft->ogg stream for voice.
An ai trained in vrchat to walk in real life
Oh the irony
Lmao, I love it
hi
hi

https://www.progressiveautomations.com/products/micro-linear-actuator?variant=18277344706627&country=US
https://www.amazon.com/Actuator-Controller-Electric-Actuators-Mounting/dp/B09G9RFK5B
https://wcproducts.com/products/miniature-linear-servo-actuator?gQT=1
https://www.firgelli.com/products/silent-micro-linear-actuator
Sign in to Onshape, the #1 fastest growing CAD system in the world with over 4 million users.

#VeritasiumContest
I am posting this video in response to a contest announced by Veritasium challenging educators to explain a counter intuitive concept in one minute or less (https://www.veritasium.com/contest).
Since the prize money is coming from a UCLA professor who lost a physics bet to Derek from Veritasium, this is my attempt as a fel...


I go for one exams and you folks cook this much
im gonna be left out at this rate 
Also simleek what the fuck do you mean "homemade arc furnace"
dawg you are not supposed to have those things at home for a reason
@opaque quartz I'm looking over at your drawings, and I gotta say, respectfully, this stuff is NOT understandable by anybody other than an engineer with robotics expertise
Now, I get it, and many of us do, because of our stupid autism imagination being powerful
However, we will need detailed designs
is it supposed to be tho?
like we are making an robotics project afterall
So, what imma do is I'm going to slowly one by one illustrate the drawings, so that they can be exported to CAD later quickly
We will need the 3d models at one point
And we need detail for that
I can reference proper anatomy and work details out, so I'll start some illustration on hand first
Please note that progress will be slow as fuck because I have exams
@red oyster mr cad please do not start pumping cad models immediately I have to work the details out
Okay
These guys are throwing awesome ideas everywhere but the list is so screwed up I have no idea where to look
We need to clean up the doc at one point
I'm going to work the hand today and tomorrow, and with simleek and matthew's help I'll show the exact design
Then please put it down and stress test it for us 🙏
@opaque quartz please confirm whether first model will be 3d print
nice call. Once i've roughed out the dimensions we can make a proper professional version with measurements.
honestly not sure. I suspect that it might be purely due to the ease of testing prototypes with that material. But we havn't done any material analysis compared to the requirements of each part.
I've privately been assuming that at least the spine would be 3d printed since otherwise, we'd need to custom order each part.
This will have to be taken into consideration for the dimensions of each part at least for the test versions
@red oyster @ruby lagoon @strange quiver what are your thoughts on using bent rod instead of wire? It's apparently higher strength, and would likely be easier to buy, manufacture ourselves, and test.

I wish these sites specified "stronger for the same cost in energy" or "stronger for the same weight/size" so that we know if there's any tangible benefit for choosing one over the other.
One drawback of bent rod is that it's not as flexible when extended
one of the biggest downsides i can think of for nitinol is that it's very "all or nothing" in that we spend the same amount of energy even if the movement is a small one. It's the equivilent of a human always using maximum force for every movement.
it might be beneficial to use multiple lengths of nitinol per muscle in order to provide different forces. If we have two bars of different thicknesses next to each other, both attached to individual rope pulleys that lead to the same location, then when one muscle pulls, the other goes slack and half the force is transmitted.
Furthermore we could use many times more wire lengths per muscle, and the force exerted would be equal to the number of lengths that have actuated. This might also provide enough rigidity at rest for us to not need seperate brakes.
With that in mind we'd want each part of the muscle to be housed in a low friction fabric weave or membrane so that they don't rub against each other too much.
We'd want some sort of wire spool in front of each muscle so that the retracting muscle's wire has the same tension as the neighboring wires - We don't want wires to stay the same length when they go slack because then they will get in the way of other components
How many Neuros does it take to unscrew a light bulb? 
One possible space-saving option is to use individual wires which self-wind around rigid steel shafts when heated
this wouldn't lend itself to stacking except for in parallel.
at least ten
Correct :D
how many required to do vedal's laundry
Four Evil's worth.
I have another idea
For a mckibben muscle
stretch a length of thin film tube inside the muscle before you crimp the ends. As the phase change occurs and the muscle shrinks, the tube gets more slack and dilates, allowing a liquid cooling loop to carry away heat, as the muscle lengthens it re stretches the thin film constricting the supply of cooling water allowing only in action muscle groups to receive cooling. Also lets you use the liquid cooling loop as the common ground.
FOR THE LOVE OF GOD IMAGE PLEAS UPLOAD
They're all stuck 
😂
Have you tried taking an image of the image and uploading it? 


So a form of valve that restricts water flow through mechanical action? That's an excellent solution for the issue of getting fast cooling for immediate reset of the muscle.
seems like we'd need to constantly pump heat into it to keep the muscle from immediately resetting on its own. Not sure how that affects our ability to make it hold static poses
it might mean that we'd need to constantly supply power to hold a half-way pose regardless of the presence of braking
That said, a friction brake would try to stop the muscle from resetting even when it's being cooled.
an interesting idea overall
@floral quarry





fairly sure this is used in medical tech
This sounds almost exactly like how muscles actually work
Cooking so hard that Gordon Ramsay would be impressed


Not sure how the heating control with current works. I doubt we can stop half way and have the rod retain the same heat indefinitely. Careful control over heat would be required which defeats the point of an energy efficient static pose
maybe a heat-insulative outer sleeve for each rod
that only goes so far though
you'd also need to monitor the heat of the rod using temperature sensors, otherwise the control algorythms would misjudge the muscle extension
so much to consider with nitinol musculature
Temperature sensors are cheap, but I don't think nitinol is always at the same length with the same temperature. I think you'd need both a temperature sensor and an ammeter/resistance sensor to measure the actual distance.
Pretty much all the actuators so far would benefit a lot from both of those sensors anyway though.
yeah trust, we'll have to put it on the list regardless
I think the thing I'd worry about most with nitinol is that it doesn't keep its actuation temperature/length, so it'd need to be reset. I think that might mean freezing neuro or something,
unlike with motors, which destroy themselves by moving beyond the maximum allowable angle and into the robot's torso, seems like these muscles would destroy themselves if one muscle did not recieve an equal and opposite force compared to the muscle on the other side of the joint. So heat sensing and precise control algorythms would be essential
seems like it moves in one direction via heating, and the other direction via cooling
No, I don't think the nitinol would destroy themselves like that at all. They would also mainly just destroy themselves by moving pas the maximum allowable length and potentially snapping
so in this sense the cooling system would have to be based on muscle control algorythm
very complicated
True, but it also seems to heat by moving in one direction and cool by moving in the other
we'd design a start and end point that matches human muscle start and end points, preventing that
to do that we need to know the legnths of each muscle at maximum contraction and maximum relaxation
True. I think we'd need to do that for most actuators though. Maybe it'd be easier for pulleys
Oh that clears up a lot, you supply the heat which transforms into shape change of the material, so it remains at the state after the change without heat needing to be supplied. However that means for return stroke, we need to affect the muscle again because it's in a 'rest state' in its current shape.
for motors we'd only be able to do that with either mechanical barrier that can resist the motor's torque, or code, there's no inherant maximum and minimum rotation
so it remains at the state after the change without heat needing to be supplied
Not quite. Once it exchanged heat naturally and went above or below its transition temperature, it would contract or expand
hmmm
It's just, pulling a heated coil that compressed and expanding it would cool it a bit
what's the relationship between the cooling during one shape change and the heat supplied to achieve that shape change? Is it one to one?
we'll have to search for that info ig
seems like if it cools as it changes shape, and the shape change is caused by heating, if the ratio is 1:1 it'd remain at the same temperature with the heat transformed totally into mechanical energy and it would stay the changed shape indefinitely.
However if it's not 1:1, it would retain heat as it's heated, and then if it cools down naturally because that heat is above ambient room temperature, it changes shape on its own afterwards.
which isn't desirable
it'd need to be constantly heated
very inefficient
Well, it's definitely not 1:1, it might be 1.01:1. I think it's likely some heat management would be necessary, if not heating/cooling to keep things around the transition temperature to improve efficiency
How hot do these need to get?
yeah. not as efficient as a proper brake system, but more efficient than the cost of bending it in the first place, therefore more efficient than a brushless motor
...how did you reach the conclusion that it would be more efficient than a brushless motor?
Brushless motors have efficiencies around 85-95%. That's hard to match
Wait, were you planning on having the brushless motor bend a piece of metal as a braking system or something?

i mean with regards to constant load over time
as far as i'm aware, the energy efficincy of nitanol is based on heat production and heat loss
we supply the necessary heat for the weight the alloy is lifting, then keep it at that temperature accounting for losses via dissipation.
i guess, if there are losses from countering deformation of the metal, those would have to be accounted for
i was thinking in terms of "motor energy requirements to hold up a given weight constantly" vs nitanol's "energy requirements to maintain the needed heat level"
Yep, I think those would be included. Also, I think in almost all systems you'd find the efficiency from heat loss here would be less than 85%.
most likely
sadly nitanol seems pretty bad when it comes to static poses, as braking is easy to conceptualize with torque motors
just add a disk brake for one axis and you're sorted.
with nitinol and something like the spine, it needs to be more creative
i was hoping that we could pause nitinol in a static shape to counter gravity without energy cost, but that seems to not be possible
imma need to think on it more and try come up with a solution
with arm joints we could jsut add disk brakes at the joints but the spine is more complex
our biggest energy sink is fighting gravity in a static pose
HMMM
if we're using nitinol muscle analogues, maybe we can copy the human body and how it ballances the hips
i went for a disk brake for the hips cause we were using motors and couldn't replicate the human body. But maybe we can now?
I think shaft brake mechanisms would work with linear actuators driven by BLDC or DC motors, at least non-screw sections of them
I think nitinol would need something in the bones for locking, which biology seems to have handled in some cases
For pulleys, I guess that rope brake you posted a while ago works?
Going to be hilarious when neuro slips a disk, speaking of has that been thought through yet?
I'm just imagining the entire thing collapsing xD which wouldn't be ideal 
I mean, same thing that happens when humans snap their spine
slip disk is horrible, the jelly is forced out as a jet against the nerves that run down the spine, causing debilitating pain and in some cases, paralysis

ok if we look carefully, nitinol actuators display the behaviour that i predicted, where slow heat dissipation causes them to very slowly but constantly retract after extension
so we'd need a system for rapid cooling at will, rather than automatically, and we'd need a system to measure temperature and constantly refill them with heat to the desired amount
pretty complicated and also costly
in energy and time
Ah, that reminds me. Pain sensors... idk whether they're useful or not for a robot.
I mean, if there's a bunch of robot parts around, it's better to have minimal or even no pain. However, if the robot is in an area where there's no replacement parts, destroying the robot body would be really, really bad.
Also, there are rare cases of people with no pain sense and there are stories of them coming back home as kids with pretty bad injuries and not realizing it. "congenital insensitivity to pain"
we definitely want to focus on brushless motors first, whilst we sort out nitinol actuators in the background
Yeah... it's like it's good for contraction but, to expand again, in a controlled way... you'd need neuro in a freezer, and even then, complicated
Well rapid cooling would use probably peltier devices cooling air or some liquid and this liquid would cool down the notinol.
makes sense. We want neuro to be able to feel touch so that she knows shen she bumps into something without visual awareness of it, and we want some way of registering mechanical change or large forces so that she knows about that as well.
(Looking at some of these stories: "By which point, I had chewed off about a quarter of my tongue through teething." man... maybe some 'don't do that' feedback is good)
😂
less work for us
don't wanna repair broken fingers or actuators all the damn time
yea
So... pressure sensors could do the job?
Yea, I think some foams do pressure sensing too, so it could be very cheap
Oh so we're good on that front then
recording this for posterity

Huh... not the type of foam I was thinking, but I guess this works for pressure sensing: https://www.reddit.com/r/arduino/comments/nbk3rp/diy_pressure_sensor_at_zero_cost_with_materials/
Reddit
Explore this post and more from the arduino community
I think any foam with graphite or conductive foam works though
that's awesome
we were looking at foam for the surface body after all
Ah, I think certain types of anti-static form are conductive (to be anti-static) and so should last longer for pressure sense
Oh I didn't even know graphite foam could do that.
I proposed to use it earlier as a better thermally conductive alternative to normal foam
Well, I'm not sure if graphite foam can deform well tho
There is somewhere in this chat link sent by me
With a foam that can
yeah i remember that, graphite foam is desirable due to its heat transfering properties too
really nifty stuff
Huh, well if it can deform and conduct electricity, then it's perfect
double duty of pressure sensing and heat dissipation would make it a really good option for the surface of the skin
Glassy Carbon Foam combines glassy and ceramic properties with those of graphite.
Idk if it can conduct electricity
it's used in computor chips iirc

thermally insulative implies bad heat dissipation
i was surprised origionally due to air being a good insulator, were the other sites perhaps lying or is there more to it?
Every day i look in this chat and i am amazed and confused in equal measure
"Bulk Resistivity - 12.7 × 10-2 ohm · in (32.3 × 10-2 ohm · cm)"
About the same resistivity as other graphite, just a bit less, and graphite is already in resistors. It should be useful as a variable resistor.
Oh I straight up missed that.
Good to know
if we go with nitinol we're also gonna want to find something bendy that's thermally and electrically insulative, so that we can stack multiple weak springs into one muscle.
i was about to suggest this foam but it'd transfer current between springs in one muscle
What about rubber sheets? It's bendy, thermally and electrically insulative

nice, that could work. Since i'm imagining flat sheets layered on top of each other
this would maximize material seperating the sheets in a given volume and would bend with them when they bend
either that or a square bar of various thicknesssees for each section

we could shape them to be muscle-shaped overall
Yep. We can make it the shape we want. We just need to know how to cook the rubber, mold it, or order it with that shape
only issue now is cooling
needs to be cooled at will, preferably with liquid cooling
aye
We need a way to instantly cool down the rod to whatever temperature we want That's gonna be some tall task
We could line the sides of the muscle with these


if we're ok with semi-square muscle bands lol

maybe water cooling on the sides
Going back to efficiency, I think these are at best 75% efficient and realistically 5% efficient
Peltier efficiency:


I also thought about them. They're pretty interesting. I just don't know if we can actually control the temperature with them. Maybe we can be like: FREEZE! And when we reach the temperature, the device stops?
Lower temperature difference = higher efficiency apparently
If you had a meter thick line of them stacked, they could be really good though
Yeah... they can cool super well but they need to be very hot on the other side for that
this, layered or something

for water cooling
for peltier it'd be the same, but rectangular, and without pipes

😭
sadly water cooling is very complicated and would cool it constantly too
maybe we use thermoaccoustic resonance?
And controlling water temperature is not exactly instant
And we were wondering why this would be cutting edge lol
Ok i figured out a solution; We can use pizoelectric fans to force-air cool the muscles. These are fans that have instant startup and no moving parts (other than a flapping motion of a flexible surface)
so they're good for our usecase of a small object that needs instant cooling
Oh yea, we have piezo fans now
That could be a pretty good application
we gotta make sure we always have access to cool air tho
heat management will be difficult with the nitinol muscles
true

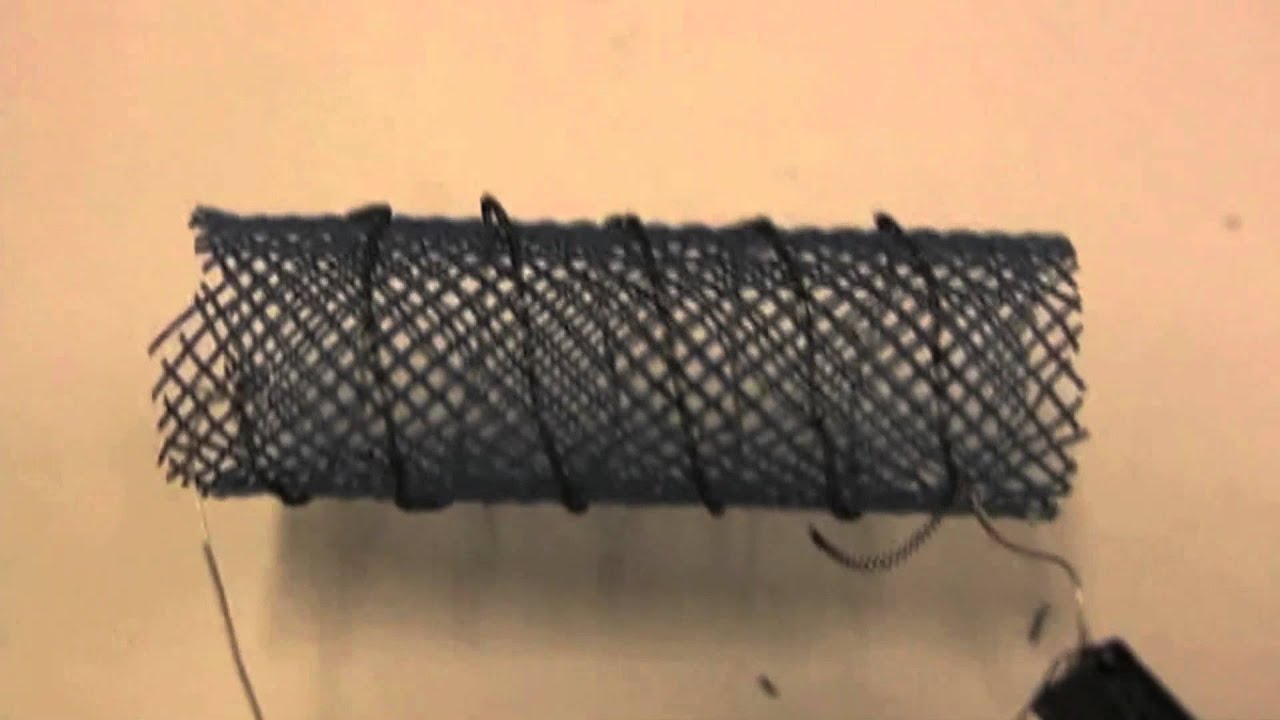
This Inch Worm walking robot is actuated by nitinol wire. Nitinol is an alloy that can 'remember' a given shape or in this case length. The Inch Worm is powered by 2 AA batteries, and when the button is pressed and a current flows though the nitinol wire, it becomes hot and this causes it to shorten, as it goes to its 'remembered' length. As the...
I also thought of another actuator type: electromagnets submerged in ferrofluid. So it's a linear magnet that doesn't lose its strength over distance
this mechanism uses a normal spring to reset the nitenol spring
Put that setup in something like silicone that stretches and it could work well... maybe
( Gotta add more actuator types :3 )
huh, that sounds cool
the actuator spam must match the engine spam
Wait, so. If a normal spring can reset the nitenol? Couldn't another nitenol reset the first nithenol? (Maybe it's not how it works)
yes. There's still some heat generated overall though, since things in this universe can (almost) never be 100% efficient
Dont you need another nitenol to reset the second one?
Actually you're right. We can just use the opposing muscles and not worry about cooling - based actuation.
this is a perfect example of missing the forest for the trees, or becoming blinkered
we'd need some cooling to handle build up of heat, but not to reset the spring
ty for your input because i can tell i would have gotten way to monofocussed on cooling based reverse actuation
it does; If the spring hasn't fully cooled in time, the increased force of the fully powered second spring would overcome the force of the first spring.
it might have some lag but it'd be manageble i think
Latency
(imagine that i posted schizo emoji)
(yeah I can't find it either i would have too)


we probably want to use some fan cooling to boost the reaction speed but that can be done with tiny pizo actuators.
It all depends on how hot the spring can get, especially for prolonged activation
the thicker the metal the more heat energy is needed to reach the activation temperature.
Once we reach that temperature, sensors would read the temperature and we'd supply only the heat needed to keep it at the same temperature. Otherwise, it loses heat to the environment. So we'd only need to reach the activation temperature and nothing greater.
On hot sunny days she might end up with permanently engaged muscles so we need some form of passive cooling that's colder than ambient temperature. I think this is where pizo shines because it works well at small scale and has no moving parts, so there's no maintenance. they last a long time
each muscle will need two temperature gauges probably, that can get finicky and expensive fast
Nothing about this project screams cheap
then we need to hook up the cooling to the temperature readings to manage them, and it has to be controlled by the muscle actuation commands
brotherrrr
heat management is like the most annoying aspect of the nitenol muscles, there's gotta be a better way of keeping them insulated so we just don't have to deal with it
😭
but the more insulated, the less they dissipate heat and the more energy is required by the opposing muscles
liquid cooling to every muscle sounds horrifying to design, might as well go with hydraulics at that point
is there a space age technology that can save us????
Maybe we need another thing as motors? Nitinol sounds cool but controlling exactly what it has to do sounds.. pain
Went back and forth in ChatGPT. The "electromagnets in silicone sac of ferrfluid" could actually be pretty good... https://chatgpt.com/share/67a25cad-80bc-8010-84ff-ae2c7af5284e

SEAs are good too though, and pulleys
Also ChatGPT is too suggestible. I'd rank ferrofluid sacs and SEAs lower since both are either brand new or rare systems
more insulation = less cost for microadjustments, less insulation = less cost for recovery
😭 😭 😭 😭 😭 😭 😭 😭

for nitinol
Yea...
seems like a "more strength in smaller package for greater energy cost" kinda deal
I think the efficiency could be increased, but it would be a lot of extra work
yeah
and the more we insulate it, the more we need to force cooling
since it'll cool down slower and the oposing muscle will need to spend more energy actuating
yea
Push it to v3
Earthworms creep along the ground by alternately squeezing and stretching muscles along the length of their bodies, inching forward with each wave of contractions. Snails and sea cucumbers also use this mechanism, called peristalsis, to get around, and our own gastrointestinal tracts operate by a similar action, squeezing muscles along the esoph...
neuro worm
"Would you still love me if i was a worm?"
 "no"
"no"
for efficiency of nitinol i'm thinking we just encase a bar of it in a huge amount of rubber and rely on stretching from the opposing muscle force to cool it
an obscenely huge amount of rubber
20 ft neuro design les go
more weight but it's worth it imo since nitinol is quite thin for its lifting strength
😂
a less than 1cm wide bar should exert hundreds of nm so we can get away with decent thickness of rubber
lol
Wait if we get nitinol working how powerful would that be compared to human force?
depends on the thickness, and the thicker it is, the more energy we need to put in to make it bend. I don't know the exact data but chatgpt claims that 2cm is 7000nm, for context a human muscle uses between 100 and 500 nm
i think nitinol is inefficient enough that we'd have to use more energy for that force than if we used a brushless motor though
I think we have the terminator muscles
so the maximum strength is higher in the same space but the cost of that strength is also more than if we were using brushless motors of equal power draw
Alright, since silicone+magnets+ferrofluid seemed to do pretty well for small actuators theoretically, here's their design:

Not sure if the outer ferrofluid is actually needed, but it completes the magnetic circuit


Kapton is a polyimide film used in flexible printed circuits (flexible electronics) and space blankets, which are used on spacecraft, satellites, and various space instruments. Invented by the DuPont Corporation in the 1960s, Kapton remains stable across a wide range of temperatures, from 4 to 673 K (−269 to +400 °C). Kapton is used in electroni...
Specifically, they seem to do well for small actuators with high efficiency, but bad for larger actuators due to the cost of ferrofluid, and hydraulics may be simpler for some systems due to being able to print them
nice
does it have any similarities to a railgun?
no
Railguns would be more like linear motors, I think, but they might also use electrostatics, I'm not entirely sure
aye
Double checked ferrofluid. It's useful, but not that much better than some fairly non-magnetic metals (left should say relative permeability):

Final Evaluation of Actuator types for different areas {gpt back-and-forth}:
- Face: Solenoids {despite their low power output, they're easy to manufacture with wire winders, and don't require hydraulic tubes going up to the face or a loud pump messing with sensors}
- Forearm/fingers: Hydraulic actuators {requires solenoids for actuation, but those are already good for the face, and compressing sacs can be 3D printed}
- Large muscles: Series Elastic Actuators / Servos {SEAs mimic some muscle springiness and give output from their center, making bio-mimicry easier, while servos can replace some tough bio-mimicry with pure rotation}
The ferrofluid sacs weren't very good
ty for the info
yw
What did I miss while I was at work?
yeah slapping some of those onto the spine would solve the space issue nicely

we figured out that nitinol has some efficiency issues due to it converting electricity into heat, then into mechanical motion
in terms of design it's pretty finalized in my mind though, so we can play about with it for future versions
Alr, just lmk when the 2d is ready to become 3d
Just finished catching up, lots of good ideas here

Checkout Mine here: https://bit.ly/saymine-actionlab
I show you how it's possible to lift weights with nitinol and even run an engine with the shape memory alloy.
My Youtube shorts channel: https://www.youtube.com/channel/UCA19mAJURyYHbJzhfpqhpCA
Get Your Experiment Box Here: https://theactionlab.com/
Checkout my experiment book: https://amz...
We were at 3k last week i feel like what
I say we should make a Microsoft Teams group or a Slack, but Discord works too
Slack is too formal for us lol
might be useful for some organization now tbh. Right now we can edit the pinned google docs, but that requires setting up permissions
^ Thats why my vote is towards a Microsoft Teams group for easy file access and editing
but Im down for whatever
sorry not allowed
the more of this project accessible on neuro discord, the better
related: can you set your google docs link permissions to default to comment? Not edit or view only?
That invites a lot of comments, but we can just reject them if needed
I second this ^
aye
done
Third
more google docs it is
That's fine tho, we can make it work
Only the main people need access to the mega repository
can google docs link to other google docs
I can make that work
Or a spreadsheet of the different docs
I'll make something visually appealing tonight
I've seen some plans. It may be posible that we're adding cat ears to neuro. Maybe not in the first version but... it has been suggested
If they could fold up into the skull, then we could definitely make it a live toggle like her vtuber
That would be cool
specially with her tail. AAA, that would be mega adorable 
I just had a great idea for the finger dexterity, will model it when I get home
2 hours from now

And so it begins

Buy now: http://www.solidworks.com/makers20
Learn more: https://discover.solidworks.com/3dexperience-solidworks-makers
3D model, parts list and more details ► https://howtomechatronics.com/how-it-works/harmonic-vs-cycloidal-drive-designing-3d-printing-testing/
If you enjoy and find the content that I make useful, please consider supporting me ...

Sponsored Content:
Happy FlexiSpot Black Friday Sale now, Up to 65% OFF! You also have the chance to win free orders during this period. Use my code ''YTE7P50'' to get an EXTRA $50 off on the E7pro, E7plus, or E7L standing desk. Buy more save more, and the price now is the lowest price of the year, don't miss out on this chance!
FlexiSpot E7L st...
Oh yeah, cycloidal drives add vibration, which can be somewhat countered by having 2 of them moving in opposite directions. Harmonic drives don't have that problem, but engineering a small drive with both flexible and rigid materials is likely some tough math & physics. That's why I'm working on split ring gearboxes. Split rings are impossible to design by just selecting ratios... unless you just validate and search all the possible combinations of teeth for all the gears, which is what my program does.
Even then, the split ring may only make specific ratios that other systems have to deal with
nice

Rookie mistake bro
this unironically solves our problems with spine motors and it came to me unprompted from a family member
we can simply use a motor driving a pulley fastened to a section of the spine, so that it's like a right angled bend.

this was the muscle that was giving me trouble:

Oh! Neat. That makes sense
we can go ahead fully brushless now and the spine motor + gearbox arrangement should be finished tomorrow
I made some progress on my idea

The groundbreaking innovation presented is a piezoelectric energy harvester which effectively converts mechanical vibration at vehicle suspension system into useful electrical energy. The core of the invention is a meticulously engineered device that seamlessly integrates piezoelectric discs within a sophisticated half- mooned housing, strategic...
AND THEN A FAMILY MEMBER SENT HIM THE SOLUTION TO OUR PROBLEMS absolute cinema
i'm interested
fr and it was just a meme
although when they woke me up they heard me rambling about spines and motors
Ya know that may be it
ORR we go with the funny option and the blessing of plot is with us
btw this was funny asf, i forgot to react to it
Am i wrong though we keep finding people out of nowhere that help vedal's ai daughter
fr
💪
Meanwhile vedal is randomly raiding people that can also help

{kind=link}
{kind=link}
i'm imagining wide flat disks on the outside centered on the shaft there
really cool looking

as for spine, seems like spinalis attaches in these locations
gonna need to feed the wire through the bumps on the back of the spine
something like this maybe

solving problems is so fun
indeed
idea could be a metal rod inside of a metal tube. Surrounding the tube but not fastened to it, a 'small hole cylinder' made out of piezoelectric material the diameter of the leg. The tube heights are slightly differrent from one another, meaning that when the leg stands, the crystal takes the compressive load. However when the leg takes a sideways force, it travels through the cylinder and then into the metal tube. This way the crystal takes the force along it's thickest axis (vertical, the length of the tibia), but it doesn't take force where it's thinnest, instead the metal rod and tube handle those forces. It would likely need some kind of sturdy disk plate fastened to the bottom of the crystal and fastened to the pipe. There would be a small gap between the plate and the rod equal in length to the compressive length of the crystal, but no greater
Thoughts?
Neuro spring shoes

Jumpy jumpy
(The piezo would work as a bit of a shock absorber, but also regenerative braking, and shock absorbers are usually springs)
yeah
springy neuro
should let her achieve some acrobatics like in the movies
ok im going to sleep now
ty everyone for all the input today
nite
it's been awesome
I had made a mechanism for it, look above
Regarding retaining heat: how about aerogel
@opaque quartz
Also wasn't able to work on illustration yesterday, sadge
Will do today
contained where?
aerogel is very brittle so we'd want it in stationary parts
and fragile so it might be best as a filler for heat insulation rather than surface coating
hmmmmmmmmm i bloody forgot that
I think graphene/nanotube aerogel might be a bit better, but I think it's also harder to make
np its got gel in the name after all
just remembered the time my friend made aerogel and then proceeded to drop it
shattered that thing into a million pieces
rn rubber and polyurethane foam rank highest for flexibility + heat and electrical insulation as far as i know
rip aerogel
polyurethane sounds good to me
wonder why I didn't suggest that earlier even when I though about it
i wonder if it loses insulative properties when compressed?
graphene nanotubees are actually really cool
I mean the air pockets get squished
And they handle trapping heat