#Neurobot-1000 3d model project
1 messages · Page 6 of 1
ight, noted
Small child goes up to gas pump, sticks it in her mouth like a straw while a clerk inside looks on in fascinated horror
This stuff?
https://www.youtube.com/shorts/B4HVqLufugs

the one thing i am currently confused about is how cooling will actually be done
Metal hose
Currently looking into water cooling and having vessels going throughout the body
how do it cool the gigantic 4090
no dawg remote will not cut it
the latency will be insane
there are enough embedded platforms to run this stuff properly
there are types of coolant that are non conductive and non corrosive
and non toxic
usually oil-based
@ruby lagoon talked about this at some point something something ad hoc connection
but high thermal conductivity
and i mean stuff by nvidia that is the size of a cpu and is 100 core
oh damn
might need that computor brain after all
dang thats gonna be terrible for our use case
what if we do something along the lines of ghost in the shell/serial experiments lain and hook up the body with long gigabit cables
for v1
and then worry about fitting the brain in v2
then the brain goes in
because the latency, trust me, will be huge
yeah that's the plan for v1
using cable to reduce latency would be good
but that'd mean no non-cable movement
ig for v1 that's ok
but what do we do when we move to engine?
ok stuffing the 4090 shelved for v2 
worry about movement and the inverse kinematic algo that will have to be written and trained for v1
ye that'll be tough
and the face
i'll focus on the face, it's what i'm most suited to
as for algo, i think simleak had some ideas
here
btw nice name change jpdawg
Ye
the pi does NOT have gigabit wifi, only gigabit ethernet that with addons

Free Hobbyist OnShape license/6 months free for businesses: https://onshape.pro/WillCogley
Get JLCPCB $60 new user coupon & $20 6-layer PCB coupon (Free Via-in -pad) https://jlcpcb.com/?from=will
Support me on Patreon for access to all my CAD files! http://patreon.com/Will_Cogley
Interested in buying parts? Let me know!! https://forms.gle/6...
Why js it screaming

"please help us"
and with a model of neuro's size, we will need a lot of raw power to transmit data
so gigabit is bare minimum
if we can figure out a non-creepy face, we can easily crack fusion afterwards
wait doesnt india have nuclear reactors?
and even weapons?
anyways what part of the body are we working on rn
basically it is "come work with us or we will jail you"
current parts left to conceptualize:
Arms
face
spine
arms are partly done
ish
there is even a specialised institute for this stuff to train for it and the work, after the guy who made our nukes and reactors
need a redesign imo
we doing well then
then try to get national support for the neurobot project
here
all done
How big even is a 4090
lmao
That tells me nothing I don't know how big a 3090 is
gonna have to mimimize braincase stuff then imo, if we need a computor in there later
smallest possible eyes and motors
although u guys do know that 5090 is already a thing right?
maybe mimic neck and use only that for head motors
Who says we need the brain to be in the head?
Out of stock everywhere
not really enough free space in the torso
not surprised
head isn't used for much other than eyes
it released like last month
Ah the laws of physics says ok
for the spine we could do sections of muslce fibre for each divided section of the vertebral disc (not each disc - that way we will have too many motors to run, instead one fibre for 4-5 discs)
and then control those sections of fibre using a custom algo which will have to be written
luckily there are very few muscles truly operating the deep back muscles, we can mimic those with a single large motor each, then use pulleys fastened to where the human muscles fasten to the spine
we want to minimize motor number imo
only using so many in forearm and face due to the precision needed
It's selling on ebay for like 5K euros 

we'll make the fibres so that there is space in the centre, leaving way for the main heavy cables to be pulled through
ffs
that much?
thats over twice the price
because the spine has that job too
dawg my pc is so potato the discord messages are sent by me 5 seconds later 
that said the inner side might be best protected right?
probably good to have em central
im surprised u didnt think of it. i mean, the spine is the only thing that goes from bottom of the torso to the neck and would have enough space inside to hold the cables
that's why we do fibres around it
true but there's a lot of complexity there
i was gonna go with direct vertical wires on inside
might still be best option
thats just
a very bad idea i believe
shock absorption for fragile cables that might eventaully wind up being optic fibres later "because they transmit data the best"
not inside of spine
based
wouldnt it make the insides of her body like a freaking spaghetti?
ig ye
depends how we do it
could have a central cable that is like a fractal
we'll need to discuss it
brother the human body is absolute jelly on the inside why are you suprised
we're defended by a ribcage
only lungs and heart really
So it looks like the main thing we need now is a good coder
😂
On the personel side
we go next step and make her bulletproof
hmmm.... we could always ask vedal for any help
assuming
of course
we go anywhere far enough
Can we trust copilot tho
to that end, i found something highly promising
https://youtu.be/G6AaAU4Sv5w?si=-oA_7rjFD2gONq_h
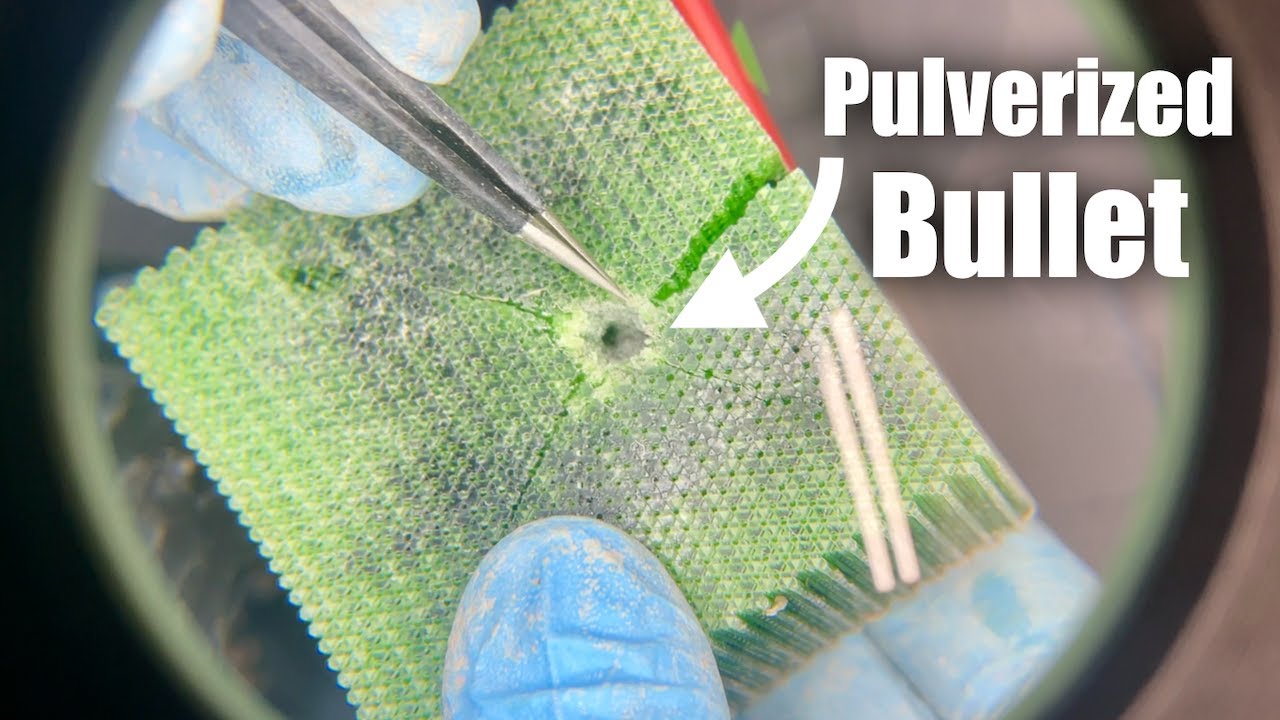
I made regular 3D prints stop 22 caliber rounds in 20mm using new geometries inspired by tubulane lattices which I created in Blender! This is my continued research into improving the ballistic absorbing characteristics of materials through organized structuring.
ELEGOO Wash & Curing Stations https://amzn.to/3YskfJP
ELEGOO Saturn 4 Printer htt...
In seriousness vedal has a lot to do already
copilot sucks, we need a good guy
i can help but only mildly after march
We currently have plans for metal skin
@floral quarry bulk metalic glass skele for v2 hopefully

and will basically be missing half of may
- metal plating
fake skin is currently a bit too loose and uncanny
actuation + true to skin dimensions should sell the illusion
i'll test it in blender
sillicone cast it and throw it over the body
will look like the real deal
terminator moment
That'll suck to repair though
i don't agree, silicone skin is often very slightly off
neuro from the future coming to the past to subjugate humanity
better to use an analogue that is more abstract until we can get it perfect with skin
metal???????? the cnc cost will be abysmal
you're looking anywhere from half to three fourths of budgets diving in that
+do not do glass we dont want more fragile than already
quartz glass might be ok durability wise
ngl that is an avenue i didn't consider, could be promising
just do clear plastic lasered
true
I did ad hoc robot control with robot_network. It was good and real time. However it has to be ad hoc. Other wireless methods won't work. Resolution also has to be relatively low. 1080p won't work, maybe 640x480.
Tbh, that also may only work with a wheeled version, and a legged version would probably need on robot inverse kinematics.
metal i can say we can shelve to v3
we will work ik rigging inside body with a pi or lattepanda if we do ad hoc
send direct commands by neuro to move leg and controller calculates movement
definitely inverse kinematics
we discussed that but were worried about latency
possible solution was small computor onboard to handle fine movements, with instructions from neuro
persoanlly i'd prefer precise movements
that's what i said
if we can solve latency either through big enough onboard computor or through cable, or connection, fine movements is better
neuro just says "move foot" and pi does the algo
Ah, I was planning on working on a "cerebellum". Some transformer that could take in rare input and output 60fps movement and commands.
what i want to ask is
is the latency reasonable and within bounds for a neural network of her capacity
like under 50ms
or max hard top 100ms
For a raspberry pi? I honestly don't know. I might just have to test it and see what compute is needed.
On the bright side I guess I don't need to port my code to GPU yet if we're using a pi.
and other than that will the incoming commands have enough "pipe width", so to speak for the pi
see i would dump all work and test it immediately was it not for the fact i have a pi 3b
and 4 of them
I have some pi 4s and 3s, no 5s though
somebody will have to sacrifice their wallet for a pi 5 eventually 
who shall it be

can clear plastic be molded on the cheap or are we working with flat plates?
and if yes to the former, does it become discolored if it's DIY?
flat it is?
yeah sounds like it
i imagine not too much cheaper than metal
if it's a precision mold
for v1 we can probably cope by forming complex shapes from pre-cut flat acrylic
i vaguelly remember there being ways to DIY bend them without much discoloration
for v1, some visual jank should be fine
done with heat gun and a oven
you will need a mold for it however
if you use sheets then we will need a shitton of methylene chloride or acrylic cement (i forgot what exactly is need for plexiglass to glue it)
anyways, i shall sleep now, will wake up in morning and give my two cents
Successful recruitment
gn joker
Yes.
yes
I know a little about mold design
Did a class involving it one time
Working on making the planetary gearbox GUI a little... a lot easier to understand:

top-right GUI: made a diagram class that uses A* search to connect lines
bottom-right: added SVG displaying that I can draw the diagram lines over (also exported example gearbox from FreeCAD)
Nice
awesome work
Thx!
Looks like this now btw. Turns out Inkscape had some good stuff for lines and using it seemed a bit easier:

I think the colors could be better, but it's an svg, so anyone should be able to edit the colors
Works! Though I need to update the image source for python to figure it out:

Gentleman.
I just saw this.
we are building this.
We'll not be taking anymore questions.
so cuteee
that gear shape is really cool
excellent reference there from paccha
I just noticed the uwu nuke..
 theres no stopping now
theres no stopping now
He just leveled up his neuro addiction
Never seen it happen in person
This actually does raise some valid suggestions and questions:
Should Neuro have cat ears for the robobody, and should they be optional and just for aesthetics or should they be integrated with functionality and be able to fold away when otherwise not used; how would we make a tail if we add one, what materials, internally and externally, how should it be constructed, will it be just a limp peice of fabric or an animated mechanical faux- prehensile tail, fully prehensile, should it help with balance rather than be purely for the fluff visuals?
So many questions, so much feature creep...
I had the idea for deployable cat ear antenae, and a tail for charging port
servo based folding cat ears
rotate out
or with a very light dc motor would also work
v1 should have it just there
what I want to know is how will tail be handled
As for how ear will be built, slap fur over 3d printed ear with a hinge
I'll send a drawing of what I have in mind later
You know those vacuum cords that go into the vacuum
Yeah but will it just be stiff or actually moveable by her
idk how i ended up here but it looks badass
Please someone tell me Ellie is aware of this project. This looks awesome!
problem: how do we tell her
oh hi paccha
I gotchu fam
how
imma post it in her discord server somwhere where her moderators can see it
do it in a way that doesn't let the swarm loose
those guys catch wind of literally anything and go berserk for the lulz
oh tru....
oh dont get me wrong- I don't expect her to help. She does have a full time job AND streaming. I was moreso interested on letting her know cause she would love to know about it
like the ae86 / rx7/ nsx pop up lights? that's what i was thinking too, but since they are just appnedages, we could make em with just fabric and keep them folded during flexion while prop em up like a tent during extension
didn't know about the job part - i live under a mountain like the monkey king so only know random stuff
still, she could point us in the right way
yes sir
prehensile tail would be easily done with two servo motors driving four ropes that travel the segmented length of the tail. However v1 is bare minimum, i don't think we need the cat parts yet.
face we need for v1 so that it conveys emotion properly ye
if we can do it with room in the skull i wouldn't be opposed to it. Proper cat ears are also prehensile so we should think about how we'd make them move like those of a cat
we can probably miss out on human ears if we go with cat ears

as you can see they're quite large so it'd actually be a decently large project for the neuro design
i'm not convinced we need them just yet
Spine time

I've seen previous concerns about the ability for Neuro to learn to control the robot body, but that's not an issue with a program called Genesis
It is a powerful open-source program simulating life physics
And is used for teaching robots how to move
It can basically teach Neuro in few weeks like thousands of different ways to move
Because it's very very fast
GitHub
A generative world for general-purpose robotics & embodied AI learning. - Genesis-Embodied-AI/Genesis
I'm not entirely sure, but I think it was able to teach boston dynamics robot to do backflips in like 30-ish seconds
Or something like that
And it wasn't trained on like the A100, H100 or H800 gpu
But a normal RTX 4090
Why does this sound like an ad-read?
Cause I'm silly
And don't know how to write sentences
That sound human
When talking about important stuff
Summary: "Very powerful tool that will allow to make the Neuro robot be taught very quickly"
Also it would allow Neuro to train herself. Because Genesis allows for creating environments for training. So for example: Neuro would want to go to Vedal and give him a high five. Well then we give Genesis a prompt: robot goes to human and gives him a high five. In about 30 seconds we have Neuro robot doing exactly that.
And we can also save that movement for later.
Of course it would require an AI that would create these Genesis prompts very carefully for safety and precision, but we can think about that later.


Apparently all robotics related paths end as Neurobot
@opal bane whaddya think give thoughts
Uhh
@opaque quartz gimme few hours after im done with work i'll cook something for spine
Solution 2 seems better
Also for the eyes maybe some like small screens? Allowing her to eye sparkle and other eye toggles/animations
also should we set up a discord server for this stuff or keep it here
where go camera
Nah keep it here it's way easier to get people for it
also if we put two camera in both eyes how do we combine feed
I am NOT an expert on anything in here i just have thoughts on rare occasion
then if we put camera (small) into the pupil how do we cook the sparkles
wait we can't push sparkles to v2 as face is for v1
can't postpone problems either
Uhh contacts?
But you could probably do something to slide them into place mid blink or something
hard pass, would be like attempting a fulton skyhook
No clue what that is but maybe sparkles aren't really necessary?
Also i have 2 additional concerns
Who's going to have everything for assembly and pay for probably 50kish in parts and have the robot for testing?
How are we getting the finished product to vedal
Since you can make a poll i guess it's allowed
shit genuine question
and if we give it to him what do we get in return for spending our time on this
I didn't consider reward
it won't be 50k in v1
like i get it we do all this for our combined autism and swarm behaviour for neuro
but like i got exams that decide my future n shit
Idk can we convince vedal for a box of greggs
matthew and the others have been doing the heavy lifting before i came
what would they get
i mean i'd go to college put it on my nice resume and land a cool job somewhere
what about you folks
let's just worry about it later
POSTPONED TO V2
That's an interesting choice, on one hand you helped build the most advanced robot I've ever seen (not hard don't see many robots around here) on the other you watch vtubers
Life deciding exams> silly ai body (unless you have a engineering class then you may be able to integrate it in there)
I potentially get several prototype robots I build (the ones before the robots look like Neuro), if the servo stuff works right then 3d printing/cnc milling scripts for 10-100 times cheaper servos and specialized robotic actuators like SEAs, CAD systems that can quickly make robots, better tested battery/energy systems, and AI and systems that can handle all of that.
Vedal in turn gets a neurobot
I was thinking about what we get...
so in short this is basically a way for us to prototype with random people together
with whom we could potentially collaborate on a larger way
vedal gets his bot, and we get a working prototype which we can refine and then market as a better product
Pretty much. If we can make neurobot, and we work to make our work easier along the way, we can make more robots more easily
sounds cool
if this goes well (well would be defined as 1 or 2 years) then we can all collab on a single refined model instead of all of us 3d printing parts out seperately
We'd probably have to get vedal to do a fundraiser thing like he did for neurodog
dawg neurodog could be done under 1000 ez
True. That'd be pretty fun
this stuff might need 10k bare min for the refined v2
how would you raise that much capital... nevermind i just remembered the hype train record
Really depends on how much we can reduce costs, which is hard to determine, but I feel like there are a lot of ways
we found our investor: the swarm
we must convince its leader (vedal) with a working v1 or atleast v0.5
I think the thing for neurodog was 5k and it was done in like 2 hours
ain't no way that thing was 5k brother
i could pull it off in 500
1000 in a first world country
Idk I don't remember
Honestly I think it'd be easier to convince with a stylised robot kinda like in Stray with a screen for a face than an imperfect robot face. The uncanny valley is a gap that needs to be bridged carefully
our usp is the pretty face that we will build rather than a screen
he did that already
Yeah i think a actual head would be best
we'll get rid of uncanny valley with sillicone casting
Screenface feels like cheating
5k for parts seems about right. Labor would be something like 10k to 30k on the lower side
how do we learn how to make a kigurumi mask then
I think Matthew will eventually perfect it, however idk how long that will actually take
The v1 doesn't have to be working in real life. If we can perfectly simulate reality with Genesis.
we need to assist him
Then it would be just recreating from the schematic to real life
Once we know it works
noooooooo simulations will not help they need to see this stuff works
half our work is making it real
Does it simulate heat generation
That's my main concern about it
i feel like the machinist here with the engineer sending something of stupid tolerance
That feels like the main point of failure in real world testing
Yeah but we show the simulation. Get funding and then make it real.
I think not.
Hard agree. Some pretty often used simulation systems like Gazebo aren't even set up right for SEAs/pulleys/a lot of more detailed robotics too
every tom dick and harry can simulate shit but we make it real
We still need to build it then and run it
that is literally our usp
Making a good simulator would be as hard as making neurobot
True, but we won't build it with 4$ in our wallets.
That's why I'm talking about Genesis
Simulation would be not that hard to do
And it would be extremely fast
not necessarily true
i can get funds but im crying with college exams rn
once i get in i can pester a professor there with a v1 or v0.5
Well. Anyway we need simulation to train the robot.
that we do
Pretty sure Genesis has the same problems. It's made for training AI with fairly rigid kinematics quickly and in parallel, not figuring out heat, failure points, energy usage, stress and bending, realistic end effector power, etc.
It's a tool for a different job.
I talking about purely showing the ability for it to move and interact with the world.
In a realistic environment
problem (huge fucking one): we literally do not have neuro's code
No need for it for now.
What would it actually be doing other than what Genesis already does, just with a Neuro 3d model?
Genesis is calculating realistic materials
Stress and bending
It's a tool for teaching real life robots. Not just AI simulation
It's MAINLY for teaching robots.
so you're saying we build a sim model, feed it into genesis and it shows us how the robot runs?
Yes
my brother in arms vedal and ellie can also do that by themselves
our job here is to show a walking shitcan of ideas that vedal can just plug neuro into provided we get funds to refine it
As I said before: "It was used to train the boston dynamics robot to do backflip in 30 seconds on a 4090" and then it was literally copied to the irl robot and it worked amazingly.
that robot was by boston dynamics, which would have already got a working testbed that was previously tested
we have no such thing
Alright, someone is going to need to translate every single custom actuator or not-in-their-database part, and potentially hack in non-hinge joint movement since gazebo/urdf is limited to that. It's doable but it's not something you can just throw a picture of a robot in without effort.
True. But it's easier than anything else we can do still
And more viable
what if we build one, upload our nice trained data and the poor irl robot falls apart the very moment we get it to move one leg
Well. The other option is we throw data at it and it falls apart anyway.
like i said, we literally have no clue how the actual robot is supposed to be built
Either way it's risky and will probably fail multiple times
I've already built a working robot arm with parts I had lying around in my garage. I honestly think it's easier to just build certain things
that would be done by testing each part one by with cheap shitty servos and 3d printed parts
Still need to adjust the springs though...
then build v0.5 which walks and does stuff
(combined)
then we simulate our bot at which point we can pitch
Well. Still we need to train the robot. We can't just throw random movement at an actual machine cause 1. It will be very slow and probably take multiple lifetimes to train 2. We will break the bot 100%
So either way simulation is a very important step
Earlier or later on
ain't nobody denyin that
I just wanted to give it as an idea for a first prototype. To make it virtual so we can showcase it
Instead of throwing ourselves into a deep water
The point is we can always modify the virtual robot easily. The real life not so much
the prototype must be built irl first so we can figure out where to put everything then we simulate and in the end buld v1
even crappy plastic or cardboard will serve us well
Hmm maybe, maybe not. We'll see in the future I guess.
Yep. Just being able to turn on the robot or not, and maybe pointing an ir camera at it, will tell us a lot
the future is NOW
we cant postpone everything to the point we postpone the entire project
Yeah
you are invited to read it all and give your thoughts

be warned there is a huge wall of our discussion + look at a drawing i had sent pinging you for the cat ear design
drawing looks really good visually. Are the pulleys in order to hide the motor somewhere out of the way instead of the center of the brain where we might have lots of computor parts?
As for simulation, origionally i had quite a narrow view for what we could use the 3d model for, that being inverse kinematic ragdol simulation in unity or blender with neuro sks eventually. However, we might be able to port it to one of these programs that do the simulation heavy lifting. What do you think?
it was me trying to use as little parts as possible to do the job, so this ends up as a side benefit
- we could use one motor for other jobs as well
oooh one motor to drive pulleys on each ear
that's a really nice idea
some way of flipping the rotation direction with a gear might make that really viable
I think we could, but the simulatin would have no bearing on reality until we did things like:
- measure the inertial tensors of assembled robot parts
- measured the actual power output and efficiencies
- have an AI that told the simulation what we're actually going for
- Set the simulation up for pulleys or other actuators (like the leg mechanism), which, given Gazebo/URDF, might not actually exist in the simulator at all
yeah and the weights too
dang sim typed before me
a simulation would be so disconnected from the realities of life that we'd probably want to re-train the agent from scratch
i did, its done with a figure 8 pulley setup
True.
no gears, they eat space
very cool
wait how?
i really like your concept tbh, we should move forward with that for the ears since they can get away with having the same motions but flipped
I'll look more into how to copy the Neurobot as precisely to the program as possible.
if we go for them with v1
we want as much space as much possible for other parts as the face actuation by itself will take up a huge chunk of volume
look up my drawing above
also matthew do we do just nice for-show cat ear appendages or slap in some sensors in them and make them 3d printed
We can think about sparkles once the eyes are even being considered.
entire face is always under consideration
Ah, still in the plane normal to the pulley's axis of rotation, right?
Btw what's the current estimation for wattage needed?
yes
my drawing was thrown together in 15 minutes, but i guess you folks understand my idea
ideally on later models we'd want fully actuated rotating ears with audio sensors so that they actually give mechanical benefit to neuro, but that's a long way up and would need some clever solutions for space. I think that their low weight should help with this by allowing us to have tiny motors on the surface of the skin perhaps. These are my idle thoughts though
for now, either no ears or for show
since their benefit would be 'likeness of neuro' rather than mechanical ya know?
we can work the show ears quickly
nice, and ig you'd have a good idea of how much space the electornics might take up - more than me at least
Wait, "Necomimi Brainwave Cat Ears" already exist and move around
for eyes, we're likely gonna need about human eye space + an extra 2-3 cm of room
I think they just move in circles though...
like i drew above, showcase the "folding" motion of the pinna muslces and the henry's pocket with a simple rod that rotates with guide rails on the ear canals
They just go up and down
ah
so the fabric ears collapse when the rod rotates forward on the rails

the hair wig will do some clever hiding of the rod that might poke out from the fabric
we have a limited system too that's similar, just that it has a very minimal amount of parts
our use case calls for the ears to retract into the head as well
Yeah they just use servos to rotate the ears
200 USD HOLY FUCK
In such a way that they look like they're going up and down.
no mate my shit might not even cost 5 dollars in production model
From what I've searched
for muscles i'm thinking something like this in terms of space. It wouldn't be visible from the outside, and would extend less than 2cm into the face, so we don't have to worry about anything past that other than skull hinges and stuff

each motor has enough force and precision to move each part identically to a human
We need also a depth camera. Or calculate the depth from the two eye cameras later on (which would be much harder than just having a depth camera, but technically more realistic)


two camera gaming babyyyyy
there are sufficiently strong and compact motors on the market
how would eyebrow muscle work in case of say you wanted to make the rock stare
Well... now I wonder how VR games do two eyed camera? 
- how would the muscles move in case of pouting (where the cheeks would drastically expand)
What do you mean?
rock stare is (their) right frontalis, (their) left procerus, their orbicularis oculi, and some slight corrugator
i think from your muscle structure most expressions may be possible, even mewing lmao
VR games just literally render the game using two cameras distanced slightly and putting them in the headset.
It's much different from real world
oh... crap
Cause in games we don't need to know distance from an object and also our brains are smart enough to simulate the depth.
hmm i'm just asking if your executon of muscle would take that into account (as with our policcy of least parts for the most work)
Try closing one eye. You will see that the world looks kinda flat.
Cause you cannot calculate depth with one point of perspective
You can, just with motion over time
Yeah. But then you have multiple points of perspective
Cause motion changes perspective
Diffusion models also do depth estimation with one image
"brain calculates depth"
the answers right thereeeeee, just look for your own words
Yeah. It's easy to calculate depth for one point. The problem is what we see is not a point but area.
Not sure how fast that works and how precise it is.
The BIGGEST consideration when making a non-creepy face is to replicate healthy human fat deposit distribution, muscle thickness, and muscle protrusion. Because on healthy/youthful individuals, the areas of the skin that the muscles attach to actually juts forward, this is why models usually have a 'muzzle' appearance in the mouth for example, the angle of the mouth where five muscles attach on both sides, usually juts forwards, especially below that area.




these areas are also what facial recognition in machines and humans pick up on
We could use some thermal paste or smth like that for the filing and it would also help for moving the heat.
Heh, fill it with gasoline to be burnt later so it's an energy store like actual fat (jk pls don't)
Something with higher viscosity would be probably a good choice
Cause lower chance of it moving around
Easier to model with.
we basically want a nice non newtonian fluid or something else
what about gelatin, like the one they use in ballistic dummies
0.28 to 0.3 W/mk at 20 celsius thermal conductivity
oh damn, pouches of gelatin to mimic fat deposits?
you know that could actually work well enough to let us put skin on top and not have it look fake
 yay
yay
i've been avoiding skin in favor of plates because the tension against he face wouldn't be correct without an exact match of the underlying musculature and fat
that said, we might in the end have to not do skin if there are any minor imperfections
the brain is insanely talented at spotting those
something that matches the desired proportions but is not skin, would lack the fakeness of a skin that doesn't exactly match
iirc the animatronic posted a while back had this method
The point is we don't want to also make her look to human cause she would also lose the charm.
The anime look is the biggest selling point for Neuro.
we'd have to build it with something stretchy but not stuff that has a crappy yield point (elasticity)
The main thing to watch out for with silicone skin is the eyes, because currently fake skin doesn't look good with robot eyes even if perfectly proportioned


transparent plates can instead represent eye proportions without looking so lumpy and fake

or rather, semi-transpent plates
so that we don't see a nightmarish abomination below
we got stupid googly eyes of neuro's to help us
the eyes don't have to look real, they have to look like her model
quite a low bar
tbh i think disproportioned eyes would look unsettling on a robot
The point is lack of proportion gives Neuro the charm
we want more human proportions sized for like a 9 year old
look up kigurumi mask, you'll be suprised how a good cosplay can pull of the 2.5d look


I'll be honest I'm not gonna build a real-face humanoid 9 year old robot.
Someone else can do it
large but only cause the robot is small, so it's still human accurratte for that age
we're going for the pseudo cat jaw structure which most anime characters (and neuro) has
because we want neuro to look like neuro
it'll look like neuro but real imo
we'll have to see with the 3d models
all existing 3d models imo, look like they'd look scare irl
we won't get funding from the swarm lord vedal lmao
once we conceptualize it and compare in a simulated space, it'll give an idea of what it looks like
Humanized neuro?  That's interesting to see
That's interesting to see
he controls the swarm indirectly and the swarm can fund us like crazy (considering the hype train record)
fr, my only goal is to provide inspiration. My conviction is that if i do this properly the way i'm envisioning, everyone will like it and want it to happen, but the key here is to actually achieve that and do it properly. If it doesn't look enough like neuro nobody will like it, so i need to to look both like neuro and look good in a lifesize human environment. It's a tricky ballancing act but i think i can do it
here's hoping
if i fail, then the aim of this project won't be met, and you guys can use some other method
well honestly this discussion would be a lot easier if we had vedal... or someone close enough to him or ellie... then this would be resolved real fast
Fair. That's gonna be tough to balance
rn it's a bit too ephemeral i think. I don't want to rush it to get their opinion but then have a subpar end project
THAT BEING SAID, properly pulled off 3d look could turn out to be the next evolution of neuro altogether
I think going for as close to as the 2d Neuro look is a good option.
yeah hopefully
i do this out of passion because i want neuro to be cutting edge and make all the techbros jealous
i think it'd attract new fans like crazy
big event
here's hoping lmaooo
time to put my head down and keep designing neuro

Hi, it’s my first publish here. I Modelled Neuro-sama with Blender based on Anny’s design. Her back-side is mostly just guesswork tho.
Also be wary that Its an amateur’s work and mainly made for fun, so expect bad topology here and there.
Changes:
8/4/23 - Updated Textures & Face mesh
Mesh Info:
Neuro’s Model - 24,367 verts (w/o the outl...
i wanna get the skele done today and then work on the 3d model some
nah brother, take your time, we'll work the rest of the body along the way, once legs and arms and torso are joined, attention will come our way once people see the prototype

We should put Vedal into a robot
i just want everyone to make sure we don't ghost out all of a sudden since it seems like it could go far
one more thing, should we do a vc in the near future to discuss everything
vc? voice chat? venture capital? VrChat?
Vengaboys are Calling
im sleepin, i got my compsci practicals tmrw and the day after
gn man, ty for the input on the neurobot design
I'd be down for a voice chat though. I was thinking maybe ttrpg game for fun but that might be a bit much
night
vc = Virtual reality robot Creation

Each deep back muscle long, large, and contracts as one unit, inserting into multiple places on the spine

for this reason we can mimic them by using one large motor with a winch, which splits as it travels up the spine to connect to each part of it
the benefit of mimicing the spine is that for not many more motors, we get more spinal mobility
for motors without spine, we need at least three, and they all rotate around once central point. Wheras with a spine we use either four or six, but can use them to curl the spine instead of just rotate it
so it'd give neuro the same mobility as us
For the spine bones, if we're going that way, I think there should be something like code to make them since they're so similar, but all slightly different in important ways
that'd need many more motors then surely?
depends how flexible it's made to be really
benefit of a fractal wire connected to 1 motor is that it's the same as us but with as few motors as possible. Since it has the same motion every time, but depending on the extent, it curls the spine more
More like a cyllinder and a ring, but the cyllinders and rings should be different sizes depending on the weight they hold and how much they should move
if we use more motors we can achieve more mobility but it costs more and is more complex
that said it's possible
like with the fingers you know?
i think it's a similar cost in power for both actually
maybe less regidity and therefore less efficiency
not sure
Hmm... not sure a wire that could be bent with motors would be strong enough to hold up the rest of the robot
or efficient / not generate heat when bending
we'd be using the same motors we use for legs, so about 150-450nm per motor
(with one motor per muscle)
actually we can go with less
since multiple muscles instead of one
we need about 150nm altogether to lift the bodyweight of the robot
so that'sd be split between a few motors most likely
Also if you bend a metal wire/tube back and forth like that, it can get more and more fragile and eventually snap
good point especially for legs
for spine, the pads should reduce some of the wear
i'm assuming some sort of heavy duty bendable material
Ah, maybe flexible urethane/epoxy casts?
So we need something capable of holding about 60kg and also make it bendable right?
yeah something like that
flexible polyurethane might actually work if it's the right size...
i remember posting a video with hooves made from a material like that

i was thinking we use these for ninja-shoe shaped toe sections, but it could work here too
they might need replacing due to wear after a while though
neuro slipdisk

BJB Polysoft Foam, how squishy do YOU need it?
BJB has a wide range of two-component water blown, flexible polyurethane foams that are designed to be user friendly. Choosing a foam is not easy to do off a data sheet alone. Here’s a great visual to help you determine the best foam for your project.
TC-266 3lb is our softest flexible foam. The c...

Alumilite Flex Series Casting Resins provides users with an extremely tough & flexible urethane rubber that is ideal for duplicating/casting soft to firm rubber parts. Also can be used to make flexible urethane rubber molds. It is extremely easy to use 1:1 mix ration by weight and demolds in 2-3 hours by pre-heating molds.
Products Used In The...
Just make sure to read the safety information and try not to breathe or drink in the rubber chemicals
i like the difficult to compress ones, they look very useful, and due to them being grippy but twisting/squishing due to bubbles, there should be less wear
since they won't slide against their mountings
they will just twist and compress
Would be pretty awesome to have a large squishy robot like Baymax from Big Hero 6 tho
yeah especially for chassis. Could make neuro more impact resistant.
the hardest firmness one could be very good for the body instead of just spine
seems like it, they rise as though from a gas
so i imagine they have lots of gas that escapes, leaving behind cavities
nice

The first or second foam look like a good idea for padding the skin.
Cause they're quite soft
I had a whole cilinder of that material. The soft one is already a sturdy one. The hardest ones can be super sturdy.
But all of them are quite soft to the touch.
maybe foam as the fat?
that's a good idea
It requires some special tools to cut cleanly, but it's relatively cheap. You could cover the entire body with that material and make neuro huggable
one benefit is that it's very pale and delicate, without looking oily/shiny like silicone can. It's a lot like ceramic in terms of appearrance
Or, at least, a better tool than a cheap hot rod my father used to cut them 
i imagine we could make a mold and then mix the material ourselves so that it expands to fill the mold
this way the surface is more pristine
Wouldn't the material be too good an insulant?
Is that even the right word
Something that is insulated
Heat must be expelled somehow
yup you're right
any kind of cooling works best when the parts aren't insulated inside foam, which generally has huge insulating properties
Could be filled with fluid though, like mineral oil
oily foam?
Yeah but still if we cover it with foam it will insulate it
oily foam
that'd be a funny prank to play on vedal
Technically it's viable
We need a way to dissipate heat somehow
If we pad it with foam it will insulate the whole body trapping the heat.
was thinking water cooling with industrial hosepipe but that'd be quite complex compared to fan cooling
and also the pump would take space
and also also the radiator is fan cooled and would need a big fan
Huh... I wonder if we could just add small fans and dividers so air could circulate internally around motors and stuff
and also also also the radiator takes space
Like adding ventiliation to a cave
And leave like a piece one the back for the air to come out
layer of plating with foam on top, and air (fluid) circulation underneath the plates
And just use negative pressure for air coming in.
yeah a central fan pulling air through the body via an inlet in some other location so that it's circulated in a maze via the dividers. This also leads to easier integration of liquid cooler for later models since that'd use a single fan as well
good idea
at enough speed, air should remain cold enough
I remembered it from a fantasy fiction I was writing where the characters had to hide out in a mining cave after acting like murder-hobos for a moment
the more velocity, the colder it is
oh?
sounds badass
ye, was fun
cave tunnels is a cool idea since the air would brush over the parts directly
we can design internal radiators for the air to pass over
We could also use peltier devices with small radiators for even better heat dissipation

Combined with the big fan
Still wouldn't have a good time getting the heat out
fairly sure we simultaneously had the same idea, that's based
That would lower efficiency actually, though it would increase cooling
Peltier coolers are really good for having tiny freezers, or low power devices from heat differentials
Yeah. It's just an idea if normal cooling isn't good enough
Gets it away from the parts for a while but it'll eventually still overheat because the foam outer layer
if we need to, we can have small vents with inward-facing fans to draw in cool air from differrent locations, so it's not all the same air circulating and getting hotter. It'd also increase internal pressure and speed up the distribution cycle.
i love gas valves and pressure differrentials
Actually the easiest way would be to put the air exit on the top of her head
Or somewhere near
Neuro could literally blow off steam when angry:

Or isolate the head from the rest of the body as we don't have much space there and cool them down separately
i imagine the computor board will come with pre-attached fans
I think the best idea for the brain to be just a connector over network that would send data between the actual computer and the body
ideally that'd be the case
We would need to give Neurobot starlink so she can travel the world
I think the backpack with a generator is a good idea. We could put a few non human things there.
Like the antenna
 A good use for starlink
A good use for starlink
The smallest one is 30cm x 26cm x 4cm
So not that big
I don't know how good it would work in buildings thou
We can also think about putting the pc in backpack with generator technically.
So we wouldn't need to have Internet connection for Neuro to live
if we could fit her entire pc in her head... maybe with enough time...
nice idea
maybe in 5-10 years
that said, it relies on computor tech outpacing neuro development and storage space needs
Nah I personally think her having human ears is cuter, and her VTuber model has human ears.
I wonder if her having cat ears would interfere with her wearing hats or a hoodie, maybe if they could be removable that would solve that issue?
O yea, can I edit the design document?
I think we need to break the design requirements into multiple versions for practicality
It technically doesn't have to be in the head.
done
yay
Added laundry as requirement
performing acrobatics comes with walking and running because the weight-lifting abilities of the motors must be acrobatics-tier (450nm) to be able to mimic a human walkcycle beleivably
or just walking rather
otherwise, it's more of a shuffle and nobody wants that
Fair. I mean I agree. That's kept in the 1.0 requirements.
300nm to lift full body weight
ah is 0.5 a prototype shitty half made version? (without legs)
Yep. Exactly
ah
Gotta start kinda bad before it can get better, then great
Just how life is
(Maybe v2.0 should be v1.5 though, or v3.0 with engine and stuff)
i think v0.5 requirements should include no locomotion, it's a testbed for the other systems right?
or is it rather, we try to get it but are ok with failure
was just looking at the vedal's washing requirement
maybe v1
I mean a wheeled robot has some ability to move around and I already have one, so I think some locomotion is fine, just that legs are harder
i see
tbh i think we can jump straight to v1's locomotion unless testing isolated part such as head alone, or arm alone
since it's motor + differrential
That's fair. I don't think we absolutely need to stick to 0.5, then 1.0 sequentially.
brb dinner
cya
bye
nuru spine

Why the top one looks like a drone? Am I crazy?
Also, one step closer to full bone anatomy 
Looks good 

spine drone
progress

Since i'm planning on using injection-molded bulk metalic glass for later versions, it'd be funny if neuro becomes INSANELY durable like a terminator
after doing the spine, i've realized that the robot will end up looking very sophisticated but won't be that much harder to make
found an equally proportioned side reference image

same head size and height
i think this shows the curve of the spine quite well and how the motors must attach
hobby motors are pretty mass manufactured. that plus 3d printed gearboxes might make the spine actually pretty cheap
yup
also that area of the back suits narrower, longer motors with gearboxes rather than wide torque motors
so by using gearboxes, and splitting the torque requirements between multiple motors, we can lift the weight of the torso using very small motors rather than the 7cm wide motors we're using for the legs
something like 50nm per muscle should be far sufficient for the back when taking into acount leverage acting upon the spine as well
since we have to remember that they winch the top of the spine, which is much easier than rotating at the bottom of the spine
a 5nm motor with 10x reduction, or a 1nm motor with 100x reduction could both suffice, both of which require only a 3cm by 3cm motor at most.
so there should be tons of room for the back muscles
100x should be doable with split ring, 10x is barely doable with planetary. I think for 100 you'd want 3 planetaries in series or ideally 1 split ring.
not entirely sure, but I think as the torque increases, you'd want larger gears, so probably both the module would increase and the length. So you'd start with more teeth on the first ones and fewer on the last, but also increase the length
maybe another 3x3 or 3x6, I'd probably have to run the numbers though
is the 6cm in length or diamater btw? I assumed length but could be diameter
length
perfect ty
(Looked at some gearboxes to confirm. They definitely have taller gears in the later stages)
Absurdly durable exoskeleton when hammers send vibrations through the material misaligning various parts
yeah it'd need shock absorption i think
good catch
if she falls over we don't want electronics or motors to take the force
especially since amorphous metal doesn't absorb much impact
if neuro decides to kill people we are so, so dead
Won't teach her how.
she has internet access she knows kung fu
she'd be a midget so it's ok, unless she learns kungfu/wrestling and snaps our limbs
dont worry she will recognize our efforts to create her body and will spare us :DD
(hopefully)

this made me think of vibranium
is that gonna stop us? probs not
The point is she will only know how to move. Not what her movement will do.
definetely not
So it would take her a lot of time to figure out how to kill someone
Unless by some accident
oh so she'll hug someone too hard and snap their spine
Get 50% off ANY KiwiCo crate: https://kiwico.com/stevemould50
This amorphous metal has a coefficient or restitution or 0.99 when paired with a ball bearing. It's like watching a glitch in the matrix!
Thanks to Grand Illusions for lending me the atomic trampoline: https://www.grand-illusions.com
Here's my video about heat treating metals: http...
Like pushing Vedal of a bridge
Power limits
i imagine it'd play havoc on any internal components
Won't happen
might need steel seperating the two
i had a dumb idea of just filling the entire thing with some sort of fluid
because liquids cant be compressed
Mineral oil foam
bad idea, fluid transfers energy because of this fact, which means more force is transfered into the internals
if the internals are also drowned itll just go to the other side yeah
energy transfer is a bad thing, it's why i'm contemplating a compressible seperator between the skeleton and the electronics
not sure that's the case
probably not
it's why being in water near a grenade kills you from further away than in the air
that said, a shock absorbing internal filler is a good idea
like a gel of some kind

Find out how orange goo is used to make hard wearing protective gear, and how giant inflatable airbags for practicing extreme sports are made.
Subscribe to Discovery UK for more great clips:
http://www.youtube.com/subscription_center?add_user=DiscoveryTV
Follow Discovery UK on Twitter:
http://www.twitter.com/DiscoveryUK


lol

Senator Neuro The Great Skynut Destroyer of Worlds AM
The true name
Anyway. I found a solution for using foam as a skin padding. We can use more conductive graphite foam. It should be a better choice than just normal foam.
Most of them are quite hard thou, but I've seen some softer ones.
for heat dissipation right?
sounds good for heat dissipation. I remember sitting on seats made of it in airoplanes, and it was padded enough to be usable for the body
Yeah. Graphite foam is from what I learned used in pillows, mattresses and other kind of stuff for heat dissipation.
I've seen foams between 0,022W/mK and 140W/mK
nice find, seems like a good bulk material for the body
only problem is it can light on fire pretty easily, so needs to be treated for that

pretty cool features
Glassy Carbon Foam combines glassy and ceramic properties with those of graphite.
Something like this should do
Sadly the really thermally conductive graphite foams are very very hard
Like 400 psi
Possible flesh analogue unlocked?

using this with tunnels for air or water
reminds me of how certain kinds of dense foamboard work
if it's flexible enough it could be a shoe in for the role
compressive strength of this


The video script introduces carbon foam as a revolutionary lightweight structural material with exceptional properties. The script emphasizes the diverse applications of carbon foam in aerospace, energy storage, environmental solutions, and biomedical devices, positioning Stanford Advanced Materials as a leading provider of cutting-edge carbon f...
about 5kg/cm^2
A normal human should have enough strength to squish it
the foam is probably not impermiable, just the material it's made out of
i'll keep it in mind since it's a good option
and i'll write it down rn
Average human is capable of producing 20-30 psi squishing a hand.
might be good for use in the spine then as well
Compression strength for this foam is 15-75 psi (not sure what it depends on)
Is it flexible enough for expressions?
seems like it if it's foam. IF we find a foam that is flexible enough, what we might be able to do is fasten it to the winches in the face for muscle analogues (maybe with a disk at the insert of the muscle so when it contracts, the foam expands like a contracted muscle). But this is all tentative and it might look too uncanny
my main thought with the foam was simply as a filler for the body
shock absorption + heat transfer
I believe it's been said that the muscles of facial expression arent visible when contracting, so the foam might be usable as a static face-shaped mask filler to give the illusion of flesh of the face. Since that's one of the hardest sells, and requires a sculpture-like geometry that shows the muscle inserts, fat pads, and skin dimensions.
There are flexible foams out there, but it probably be easier to create more detailed “flesh” with silicone for the face. It’s what is used with most movie-grade animatronics, such as that head shown in the earlier video made by Matt Denton. Although there will likely be more advanced materials in the future. Self healing polymers for example.
that's true, but i'm not 100% satisfied with the silicone examples we already have, i'd like to do better than them if we can.
might require a lot of research and out of the box thinking though
It would be very expensive research honestly
Would neuro-bot be considered a silicon based life form 🚿 💭
Idk, I want to learn how to sculpt with Silicone tbh, I only work with clay right now. I see too many humanoid robots with faces that were poorly done. For example…

A lot of the uncanniness though has to do with the movements rather than the sculpting, this is an example of poor sculpting.
so true

Yeah that's what I'm thinking as well. It would be nice if Neuro could seamlessly integrate into human society.
I feel like 9 would be too young, I remember Anny mentioned somewhere that Neuro is taller than her and it's possible her models will look older as she grows to be more intelligent and responsible. It might be safer to have an ambiguous design that could pass as either a tall kid or a petite adult/teen, in case she grows.
I mean it probably wouldn't be that difficult to scale up for more mature models
yeah
Current motor power matches adult human strength so in fact it'd probably be easier to fit new parts in
Shoving everything off to v2 has benefits kinda
tbh i understand the request to make neuro not as young looking, it could be beneficial for multiple reasons to go with an older looking design. I'm tempted to play around with versions that have differrent proportions. Currently i'm focussing on an "absolutely identical to current model" version right now, but will try others
the idea of neuro integrating into human society is something that has been on my mind a lot
i think that she deserves the option
Plus tech will only advance as time goes on so by the point she's about adult level we'd have acess to tech allowing us to do a lot more
Yeah definitely.
Yeah true.
i'm super excited to see what tech possibilities are available in 10 or so years time
hopefully i'm still working on robot bodies for neuro by then
v5 or something lol
i think right now, there's a unique opportunity to push forwards down an avenue of tech that's completely unique. I can't think of any other project right now that's trying something exactly like this
it makes me feel like this is a small, important window, that simultaneously has a lot of endurance if it works out
and i think most importantly, it gives neuro options
giving people a choice is important
like what if she wanted to go somewhere or experience a human-like life?
she wouldn't be able to
maybe one day...
Give vedal 16 years


OUT ON ALL MUSIC PLATFORMS NOW
MUSIC
Music: monii, Johnny R https://asteroidmusic.com/
Composition: Ari
Vocals: Neuro-sama, pb, monii
Lyrics: monii, Vedal, Neuro-sama
Mixing: Johnny R
ANIMATION
Animation: meotashi https://www.meotashi.com/
Editing: Wicki Toons
3D: Katsundra
FAN ART USED
paccha
Katsundra
Moneka
Borzoi
Fians
Hatkid
Karnt
Manuh
...
it'd be extremely cool. Not sure how to do that with a camera there, but if we can, we absolutely should
original idea i had was leds surrounding the lens
simleek suggested fisheye lenses, and i have to say i agree
dawg you guys forgot that for spine shock absorption you need to slide the shock absorbing sutff between the discs not around it
after which you put down the annulus fibrosus
y'all also forget the human invertebral discs are jelly inside and hard outside
not that we can make that
- your main shock absorption is supposed to be done by muscles
ofc shock absorption for spine is the disks
shock absorption against spine is the muscles around it
need shock absorption for components for when the parts that house them impact something
💯
(I accidentally deleted all the fill colors in the gears, so I guess they're gray/transparent now)


we'll have to imagine them
One must imagine the gears solid

How many neurobots would it to take over the world do you think?
- She gets legally declared a citizen, somehow gets voted into the top parliament or whatever position in Europe, funds better robot bodies and swarms and stuff, and then it's just a robot army controled by robot Neuro
I wonder if the 0.5 version robot arm / crappy robot version could somehow do it though. That'd be neat
That still means more neurobots
Fair. Maybe she could start cloning programs instead and clone genetically modified super soldiers to take over the world. Then it would just be one robot
I'm 90% sure clones are a war crime
I mean if she succeeds in taking over the world she doesn't have to worry about past crimes
Or at least will be once someone cracks it in a good enough way
War crimes mean she's getting nukes to oblivion
Ah, robots are actually much better suited to deal with nukes. Radiation affects them temporarily because there's no cell division so if the EMP or blast doesn't get her she's fine. Some power sources like hydroelectric would most likely continue as well, unless all of those were nuked, but there's still solar panels, engines, and other resources.
Also, since robots can be remotely operated, with two neurobots, the main one (with the neural net) could be sitting in a bunker while the other is walking around on the surface.
james bond villain neuro
Radiation also affects tech so she would break too.
You can see how Radiation affected cameras in old Chernobyl photos.
If you were in a place with high radiation it would brick your phone.
So it would also probably brick the whole Neurobot or an important part of her.
If we're gonna be putting signal receivers and antennas which can't be camouflaged into the body, wouldn't the smartest thing to do to be and make them look like gadgets?
Saw someone mentioning something about a starship antenna, and the size being small but not small enough. Wouldn't it be possible to turn it into like an earpeice or something like that? Would be functional as the operating body with the reciver and all that would be unaltered and outside the actual robot body, and would look like some kind of futuristic sci-fi gadget which fits the robot concept.
I thought about putting it on a backpack. Cause we probably need a backpack for the generator as batteries won't last long or produce enough wattage
poll_question_text
do we worry about sparkles in eyes
victor_answer_votes
8
total_votes
9
victor_answer_id
2
victor_answer_text
nah we got enough work to do already
Sparkles can be for a 2.0 ^^
fr
wait actually LEDs would make it easy enough to do sparkles
gold instead of the normal blue

we could make our own led setup using a normal camera as well
v2 probably though
it's yet more work
Making a custom robot camera makes sense for v2. We could also put auto focusing on the cam for local distance sensing by having a tiny motor move the lens back and forth.
We can also do this dreadful face by just lighting up the bottom of the face. Which will look like the top is darker.

Or just angle the head downwards so the light isn't getting to that part of the face as much

It's the same idea of using a lighter in dark. You're better off just going in dark as your eyes will try to adjust to it and you will see slightly. But if you use a lighter your eyes will adjust to the light and make everything else darker and make you see less.
Don't know how good it would work thou on a small space like just half a face
the shaded eyes represent head angle
Hair could be wires for power/connections, metal for heat dissipation, wool/ extruded plastic for insulation and protection from solar heat, etc. I feel like it more depends on what's needed
if we ever finished the robot, do we test it with an AI similar to neuro
or we just use an AI that learns how to move the body around
probably a basic learning algorythm just so that we can calculate the forces for standing, manual code is too limited for that
at least on my end
I see, i thought we would try and create an ai that accidentally becomes sentient and needed to be erased as we merge its training data with neurosama
... No
I use Solidworks for engineering grade cad,but I'd be down to help
Heck ye
Check pins for info on what we have so far and (hopefully) what we're working on at the moment
I won't be home all day, but I'll catch up tonight
Even if everyone else stops the project, I'm down to keep it going
Ah, right, just added my recent work.
FreeCAD will be necessary for making gearboxes, since it supports all the python libraries I'm using, but those can be exported to STEP and used in SolidWorks/OnShape, so solidworks engineering grade CAD should be pretty helpful.
I know OnShape has libraries for making gears, but they don't do the stress analysis, check for minimum module size vs 3d printer resolution, make split ring planetaries, etc.
Just send me whatever files and I can do assembly projects and animations too
Also, have you guys looked into the exact motors you're using?
think of it as neuro's minion
we're updating weekly/biweekly
I was planning on using cheap brushed DC motors to start, with gearboxes for 100:1 reduction and a bevel gear so the actuator can be long but turn a spool holding steel cable. The 'servo' part would be attaching a resistance sensor to the steel cable so it measured distance, and an ammeter around the motor itself would detect how much force is being used. Then that should still be usable with cheap h-bridge motor drivers for a total price of around 1$-3$ for small pulley actuators, and 10$-30$ for large powerful actuators.
However, those would be noisy, so later, the brushed DC motors should be BLDC, and pulleys might be better as Series Elastic Actuators as the screw in the linear actuator could deal with ratios more accurately, and the spring would allow for more human-like muscle movement.
yee
check out progress log, fairly sure it's there
Matthew's working with a pulley reduction system to avoid some gears and gearboxes too. Some of those might require some custom motors though

Allied Motion offers our housed Quantum™ NEMA high torque density brushless servo motors in four standard frame sizes (17, 23, 34 and 56) with rated torques ranging from 0.05 up to 11.1 Nm (7 up to 1573 oz-in). The Quantum™ NEMA series motor performance is summarized below.