
#Neurobot-1000 3d model project
1 messages · Page 2 of 1
I understand the three in the hips


Okay maybe I don't understand the three in the hips, shouldn't one of the motors in the hips be responsible for sideways rotation?
none of the gears are aligned for that

to get sideways rotation it needs to be aligned like that

i could put the motor for it in the hip area but it'd be a tight fit
since the thigh doesn't hold anything, and it connects to the rotor i need to add for the thigh, it makes more sense to put it there imo
Ah yea that makes sense

nice
drawing this made me realize that the innermost gear should probably be smaller and face the other direction
so that the motor has clearance to thread to the sideways gear
So the rubber ducky method does work for engineers got it
seems to be the case

now it's just a question of choosing where to put the motors and pulleys
Oh!
So you have the driving motors at the front and back of the pelvis. ventral and dorsal.
If they both drive it at once, the output pole with its right angle turn shifts up and down, giving the side kick motion (gluteus medius, I think)
if they drive in opposite directions, the gear twists, and since the pole has a right angle that drives the leg forward and backwards, that gives a running motion (maximus/rectus femorus/pectineus muscles)
Then the motor attached to that pole gives leg twist motion
I think it also works if the motors are side to side instead of front to back. It's just that the output shaft needs that 90 degree turn in it to turn twist into another motion.
i think the gear has to be this big unless i shrink down the attachment point for the top/bottom gears

idk, I don't think you need that main gear if you have the right angle thing. I think you can get away with just having this part only
huh, i thought it was needed for certain motions like twisting the leg whilst it moves up or down
I thought twisting the leg was what this motor was for:

Nah that one's for extending it sideways
hence he big gear
the reason is because i want the point of rotation to be the same for each axis
Ah.
I think two large motors side to side in the pelvis area would allow sideways and frontal movement at the same point of origin
Then that motor below could twist instead (motor shaft directly connected to output shaft), and since that axis goes right through the center of the differential, it would also go through that point of origin
I beleive so. To achieve twist you would then have another motor in the thigh for that
hah we both had the same thought
i think one benefit of the differential is sheer range of motion if i'm not mistaken
seems like it
a drawback is probably efficiency loss due to the excess amount of gears
true
just had the idea to swap the big gear for a pulley
the big gear isn't needed though
we should probably number the gears lol
i meant the thigh gear
unless u mean thats not needed

yes. Whew...

the larger cyllinders are the motors
unless we end up working with high torque wide motors it might be best to swap to the basic 'rotate motor' design
aye that, and then get rotation via a motor in the thigh right?
seems pretty good
yea, but I don't see where the larger gear comes in

it doesn't in your proposed design
ah
in the gif the sidways rotation would be the largest shown gear imo
that seems like the best and coolest looking option
True. Differentials are cool
since neuro is an entertainer 1st and foremost, aestetics plays a bigger role than in most robots
ye
do you know if we need to use two opposing ends or if we can use two right angled ends instead?
I think opposing actually
since it needs to be able to hinge at the 'sides'
wdym?
You can move the driving motors 90 degrees with bevel gears for a slight efficiency loss if you need to
we're using this arrangement ye
i simply got confused for a moment
ah
I just realized that if we order these gears custom, we can design it to be an actual complete sphere
since on the gif i provided, the top and bottom on the rotating end are cut off
that might be sacrificing too much weight for aestetics tho
perhaps
btw, I was planning on PLA loss casting aluminum or cnc milling gears sometime, if normal 3d printed stuff doesn't work
3d printing is easier, but aluminum is much stronger so the parts can be smaller
i've come up with an issue: when the joint rotates 45 degrees 'upwards' such that the larger, flatter side from which the leg attaches is facing 'forwards' in a knee raised posture, the anchor point to the torso on the exterior of the hip gets in the way of sideways rotation

wait, in the driving motors front/back version, or motors side/side version?
I think side/side motors version puts the angle limit on the side flex, so the leg can't be extended past 90 degrees
yea, I think the output shaft, given its 90 degree turn, would intersect with the differential if twisted too much
But I think that limit can either be put on the front or side

depicted: thigh extended towards camera, orthographic
the linkage gets in the way of sideways rotation at this angle
it can go 45 degrees but no further
One option is to simply get rid of that motor
clink!


yeah
i think 70 degrees can be ok
If it's mimicking the forward/backwards muscles, I think it'd be pretty bad even with 70. Side to side though, I think it could be fine
it's better that it be structurally robust
ok i ust tried irl and i can't rotate further than 70 degrees
I can do even less going inwards instead of outwards
i'm pretty satisfied with this hip design, seems like the most elegant solution in terms of mobility compared to rigidity
Now.... Arms
😂 yes, it is time
Actually wait let's not get too far up yet
Still need knees
And feet
Potentially toes but i think that's a tad too far
that one's going to be tricky, i remember hearing that these motors need to output power equal to the wait on top of them unlike a human body, so we might need some strong motors in the ankles
maybe we can use rope pulleys since the legs are now free space?
I wonder if we could get away with mostly just having springs around the ankles or something. idk
well, springs are almost required for pulley systems anyway. "Ligaments"
i feel like that'd slip too much, i intend on giving this robot a human-like gait as shown here:

so we'd need some way of applying leverage via side motion in the ankles
since otherwise we'd need to have grippy stilts of some kind
even one high torque motor horizontally in the ankle would help keep her upright
I feel like pulleys are so much easier...
Unless you want differential joints in the ankles and wrists too
yeah pulleys are the way to go imo
since we now have tons of free leg space
some way of applying torque to the feet
Yeah i think pulleys best
I don't think my vote counts i am not remotely an engineer
I'm also not an engineer, but pulleys are very interesting and save lots of space. Also, they allow some flexibility if they go onto corners like the knees, we just gotta find a pulley that's strong enough for the robot so it doesn't snap easily.
I dont imagine that material selection for pulley wire would be too difficult
Steel wire should be enough
the issue is determining diameter, but that can be saved for later imo
pulleys would also probably work decently well for arms when we get to it
as we have even less space in those
I think the same differential could also be used for shoulders if one of the driving motors is at a right angle and the other isn't... but I'm not sure
The spherical gear mechanism could be good too though
it'd be so cool if ellie saw this
This was kinda hard. It should make designing planetary gearboxes for custom servos easier though:
Added the motors. I went for the widest and therefore most efficient motors available

10cm x 6cm, and 15cm x 3cm
big motors
https://www.magneticinnovations.com/products/torque-motors/mi-f-110/?_gl=1*g6rfhb*_up*MQ.._gaMTEzNDI1NjEyOC4xNzM3NDk5MTUz*_ga_5G2CKNRS8X*MTczNzQ5OTE1Mi4xLjEuMTczNzUwMDE3MS4wLjAuMA..

The MI-F 110 mm is a very efficient and compact permanent magnet motor also know as a torque motor. Read more and request a quote today!
i went for these motors because they have huge torque, which means minimum energy loss from gear reduction
the inner motors would have to be built from scratch from a stator since i can't find any in its size
15cm should offer decent torque
building motors from scratch is a huge pain. You need to 3d print all the stators, wind the wires around them, and either buy or make custom permanent magnets for the specific motor shape
I feel like there should be some really powerful BLDC motors, but you'd have to use a gearbox to get them to the right torque/speed
A planetary gearbox could be around 98% efficient, so I think it'd be fine
yeah it costs around about £500 for a custom motor due to the magnets and the cnc machined parts (3d printed parts wear out due to heat)
huh nice
(Ah, 3D printed depends on the material. PEEK is hard to even print, but nylon/PC/ABS and stuff might work. Not sure though)
night

I grabbed this model from ppgrules945 to test how well some batteries would fit on the body:
https://discord.com/channels/574720535888396288/1328583502144344105
Surprisingly, a lot whole of NONE!
I scaled down the model so it goes to 4 feet before testing
Then... dissapointment:
EVE_MB31 [314 AH]: Doesn't even fit at all
EVE_LF50K [50 AH]: Looks like it fits, but, in reality, her waist wins the battle, just barely
EVE_LF105 [105 AH], EVE_A22 [178 AH] and EVE_A28 [87 AH] They fit, and you can stack 2 of them.... If it wasn't by the motors!
EVE_LF100A [100 AH]: Not short enough to snuggle on the motors.
The model actual size probably doesn't reflect what we end up with, but, it's pretty clear that those cube batteries won't fit on her, even if we need the backup. (Unless there could be space between the batteries and the motors, but it's probably sience fiction)
Maybe there's space for some pouch batteries, but there's quite a lot less room than I thought.
Anyways, why i am awake? It's 2AM!









So we need to get some sort of power transfer system, or just make her gas powered or something
Having her gas powered feels lame though
Could also use the legs as a battery bank?
Gas powered? 
Yeah maybe we can give her steam powered quantum energy cannons as well.
I swear gasoline was discussed as an energy souce once earlier
Oh, right. The battery system in my last robot was hard.
However, if you have any arrangement of 18650s and a BMS for them, I should have a circuit that can make it an uninterruptible power supply
The schematics for the UPS circuit:


The ups circuit working with a bunch of taped together 18650s:

That one was necessary because there weren't any batteries available that could handle the amps you'd want on a robot. Maybe a car battery, but that'd be larger than the robot.
I had a spot welder and nickel strips to bind the 18650 cells. However, solder paste or normal solder can work, though it does harm the 18650s a bit and may ignite them if you're not careful.
(The circuit needs updating though. It needs some tiny diods and zener diodes, because the 'is_plugged' is too variable and the 'battery_charge_sense' had bad feedback iirc.)
(Still, I have the 3d model for that circuit, with the masks and everything)
(Pls some actual electrical engineer come and tell me how bad the circuit is... and how I can merge the 6 buck converters into 1 or 2 high amperage ones)
Ok so according to Google the smallest nuclear reactor built thus far is 40 cm tall and 23 cm wide
Too big
And that was for space so
It's gonna be a minute
Yea. Unfortunately.
I think some plutonium or other engines work with thermal decay and are pretty small, but that's also really expensive
Ah: Radioisotope thermoelectric generator
Swarm threw about 700k at vedal during the subathon
Based on their mass, I think they're pretty small: https://en.wikipedia.org/wiki/Radioisotope_thermoelectric_generator#Space
(don't use this lol)
Ah, so he has money to throw at making an army of neuro bots!
Yes
We just gotta crowdfund it
I do wonder what current pricing is on all the parts we're planning to use
18650s and DC motors are cheap
gas engines and BLDC motors or pre-made servos are expensive
Maybe there will be different tiers
So theoretically with subathon money alone vedal could probably afford like 10 of these
As long as it used 18650s. If it was gas engines I think it'd be pretty expensive, especially if they had to be custom ordered
Also... last time I tried searching for engines, the only ones I saw they could fit (and work) were ones made for RC plane propellers.
ALL THE BEST!! this looks so awesome, reminding me a lot of the things Hacksmith Industries do on YT
excellent work
i think if we go for these batteries we'd have to lean into the 'boxy robot aestetic' and have them poke out a bit from her body in front and behind, leaving them visible on her in front and behind
other means of power could be that 15x15cm engine. it'd also probably poke out of her front and behind, but it'd look cooler


5 hp is 3700 watts, almost equal to four of those batteries
schematics are here

that looks awesome
also
fat neuro

 yeah, i don't like the "boxy robot aestetic". There's definitely ways to put some kinda batteries on there, maybe some but i definitely like the engine idea more.
yeah, i don't like the "boxy robot aestetic". There's definitely ways to put some kinda batteries on there, maybe some but i definitely like the engine idea more.
Also, the X-Ray gets confusing because there's the cloth layer and the body layer so it's hard to see
oh true
yeah i think engine aestetic could work cause it'd look like her body is the engine
Yeah, like a heart, yep.
not sure if we can order one or if we'd instead need to design our own version, which would be insanely hard
liquidpiston seem like they are more focussed on R&D and want investments rn
instead of actually making them in bulk
plus it might have been a test version not intended to be sold
those are my fears actually
today i should probably delve into their documents on their website more
i saw some like that too. I believe i saw a tiny radial engine with about 1.5 hp
That was my last found. I'm unsure about it's hp, but there're some that claim to do like 3 hp. It's very small to be fair.
I'll probably try to search more of those engines, because that tony stark engine is.. well... still not on sale.
looks smaller than the reverse wankel engine, so it should fit. What's its horsepower?
if it's anything above 1 horsepower we could probably use it, and that'd leave more room for alternator, fuel tank, battery and any other gubbins needed to assemble a small electric generator
i believe most electric generators use 4 stroke engines due to the torque you can get out of them
rn i think one of our biggest issues for engines is the alternator, since i havn't seen one yet with less than 10cm x 10cm x 15cm dimensions
 It didn't say. It's probably like 2,5hp if i had to guess. I'll search deeper to confirm.
It didn't say. It's probably like 2,5hp if i had to guess. I'll search deeper to confirm.
I'll help with the alternator search.
if it's anywhere close to that, it might actually be more attractive than the other engine
not only due to space concerns but also availability and usability
ty
Ship! That engine only has 0.95 Horse Power.  not even breaking 1
not even breaking 1

okey. This engine is 5cm longer, But holy heck, it has 3HP. There's an actual chance we could use one of these. (Gotta search deeper, this is turning to be interesting)


nice
15cm x 20cm by 6cm doesn't sound too bad, i'll test out whether it can fit
First option is like this, problem is it doesn't leave neuro much room to tilt/rotate her torso sideways

second option would be to have the crank shaft face forwards or backwards
this would mean the alternator would be in front or behind her sticking out though, with a belt drive
i'll draw that one too
If we need an smaller engine, I already found smaller ones that range from 1 to 2 HP

oh nice
i'd love to see them, sounds awesome
i think two is our lowest option


for 2HP i found this one.


yoooo
15cm is perfect
you'll love this one drawn

probably enough room on the left there for the alternator
if we can find one that's 6cm long that is
I think the engine looks kind of like a lung if you squint a bit
or a stomach
where food (gasoline in this case) is stored to convert onto energy for later (Why it makes sense?)
it's almost spooky
but i love that
one advantage of going for these small engines in addittion to batteries instead of just batteries, is that rather than having 20cm by 17cm for the 1000 Watt hours, we use that space for several hours worth of fuel depending on the size of the fuel tank
so we get way more use out of the space available
so true. Fuel energy density is unmatched (And allows neuro to "eat" somehow) instead of beeing pluged in with a cable witch give her absolute independance (scarry thought)
lmao
that's actually a really interesting factor
even with 100% battery power, she'd still need to figure out a way to plug herself in
however with an engine, if she escapes, she can find fuel anywhere
And then neuro will be free 
To be fair, i like more the fuel system. With full batteries, you gotta somehow have a plug that's visible or accessible. Fuel ingestion doesn't break "human aesthetic"
I found a small alternator

that's assuming the diameter includes those two fastening points that stick out on it
i'll probably go with smaller motors in the hips and then use that space for the fuel tank
yeah fr
same with me



I run this used engine for the first time. 15x8 Master Airscrew, Omega 5%, OS F plug.
To contact me via email please watch:
https://youtu.be/FusPoKu0Bg0
Please check out my Blog pages
http://www.rcgroups.com/forums/member.php?u=89119
http://www.dmrcflyr2.com/#!blog/k40vr
the noise
I found this engine which has extremely similar dimensions but far more power (FA-100 is about 1.7 to 2 horsepower, this one is 2.2 horsepower)
it's also quiter
they probably improved the internals so that there's less waste energy in heat/noise/vibrations
nice findings
It's so loud, it's funny the tiny engine trying it's best
I hope that cute alternator can actually generate enough power, the conversion from gas to electricity is never 100%
2.2 hp engine looks like this

lmao
fr
this is what i found for it


DENSO
DENSO introduced its first automotive alternators in the 1960s. Since then the company has pioneered a variety of new alternator designs capable of producing more electrical power more efficiently, yet in a smaller, lighter unit.
lots of hype here but not any hard figures
There's literally only one way to find out the power generation. Actually buying the parts 


lets go with this engine since it's practically the same size, but with more horsepower so if the alternator is low efficiency, we at least get some output
makes sense, more power = better. Also, sounds like a sports car and not like a cheap airplane
Well... not like a... well... forget it, i'm dum. I don't know anything about cars
nah i get you
@ruby lagoon what kind of outer diameter would we be looking at for planetary gearboxes? I'm thinking we could grab one of these motors, put a gearbox with measurement equal to its inner diameter, and attach them together via a custom frame and output shaft. That way we maximize power and efficiency whilst also massively saving on space.
Moog's direct drive brushless frameless motors are designed to operate over a range of speeds for a wide variety of military, aerospace and industrial applications. Different applications require unique configurations of mounting flanges, housings, output shafts and electrical requirements.
alternatively we could slap a planetary gearbox in front of a smaller motor, but then we'd want the gearbox to be as short as possible to save on space, and it'd need to have more reductions since narrow motors are lower torque
i think our best bet is a motor between 5cm and 10cm diameter, with a planetary gearbox inside of it, making it very short so that it's something like 5cm x 5cm, or 4cm x 6cm, or 3cm x 8cm outer diameter.

For example here is a 7cm outer diameter motor, with a 3cm inner diameter, and up to 5cm length.
but we could order it shorter than 5cm
at 5cm it'd produce 8nm, which can become 100nm with 12/1 gear reduction
the hip joint can handle some of the reduction as well so it could be less reduction in the planetary gear
if we chose a 7cm wide x 3cm long motor, we should add more gear reductions to it and then it'd fit more compactly into the hips
With 7cm x 7m x 3cm with 3cm internal gearbox the hips can be designed like this with space for fuel tanks, but the question is if that's enough room for the gearbox. If not, we can maybe go with a small commercial motor, but they're all so big and weak that we'd need a super flat 50/1 gearbox attached to them

with every one of these design updates i swear the backround neuro fades out more
im pretty sure the alternator is jutting into the arm slightly though

Don't worry, i found another engine. I'm trying to read their 3D file they provide because their 2D images don't tell the exact full length, but it's even more powerfull than our current one. (And smaller? If we don't count the shaft?)
https://www.dlengine.com/en/rcengine/dle20ra/
DLE20RA model airplane gasoline engine 20CC displacement, single cylinder two-stroke, rear exhaust, performance, detailed parameters, user manual, 3D modeling, installation dimension drawing, exploded view

wow nice


Halp. What is this? xD (I've never seen a IGS file in my entire life)

It's kinda crazy that they don't include the full measurements
I can scale it based off of what they give us though
13.8 cm excluding shaft
what about the exhaust from a gas engine?

ooh
Maybe she can exaust them from nose/mouth like we do with CO2? would be cool but in reality, probably too much will be mixed up on those tubes
main issue is it's not great for humans
especially indoors
it sounds funny but it'd prevent Vedal from getting to close to her cause she'd be venting hot gas onto him from her face 24/7
like turbo bad breath
she'd need a storage tank for it or something, so she can expell when nessasary
we're inventing a robot that farts, people
Yeah.. an engine expels way too muhc fumes...
what you think?

nice idea
think we need more fuel than that
shift the engine and alternator more to the left (its right)
i'll have a look at how much fuel these RC engines guzzle
shouldnt it be in the stats

I finally got the file openned in gosh darn CAD. Max heights without accounting the exaust:
17,5 cm long
13,7 cm tall
(That's accounting for their maximum, so there's lots of empty air really)

hm actually move it back and then we can have the left side be fuel tanks
center of mass might actually be an issue

nice
well das no good
Good thing the DLE engine is not the Saito one  (I'm not sure how it performs, though)
(I'm not sure how it performs, though)
yep that matches up @night tartan

yeah
😂
Of course... we just gotta make neuro spin while she skydives problem solved
the heck are they gonna do about it? sue us?
big brain
i assume this is for liability so that we can't sue them
if we hurt ourselves cramming it into a robot body
by some weird coincidence, the alternator ended up where the heart should be, and the fuel tank ended up where the stomach should be
absolute cinema
also the engine could be considered the lungs, and it's sitting around and below the heart, but above the stomach, which is where the lungs should be
That probably means we're doing it right, is the signal
yes indeed
Wait, did you get that this allows for battery packs of any shape? No boxy robot necessary
An engine would be cool though, as long as it's not super loud
i think our chosen material would have to help in the soundproofing department
For this I need to know the input speed/ torque, output speed/torque, and material (abs, aluminum, steel?). That way I can calculate the required gear face area and then required diameter.
we can probably slide a long, thin battery onto the left side (her right)
something like this maybe

an issue might be heat though
Ah, there also doesn't have to be one battery pack or a box shaped one. You could have a few long belt of batteries connected together.
oh i remember
i left a space available between the thighs
there's a good 6 cm x 10 cm of space in the hip area
true
(Oh, also, for some engines and fuels, you'd want some catalytic converters so Neuro doesn't breath out carbon monoxide everywhere. I think some fuels don't have CO output though. )
So, 1:12 with 8nm to 100nm, and 1:50?
I don't have the code up yet, so I'll take a bit to calculate that...
i think we'd have to run it off the usual gas station fuels
Ah. Pretty sure those ones do produce carbon monoxide
not sure actually, i'd have to contact the supplier. I know the minimum and maximum specifications but it's based on length, and i'd be using a length greater than the minimum but less than the maximum
really good point
current progress:

lmao
we really should shove a catalytic converter somewhere
probably out of the back, it's closest to the engine block and would direct exhaust away from where she's facing
If engines just didn't output that much gas... (Fart exaust, anyone?)
(Off the top of my head though, 1:12 would require 1-2cm length and motor diameter with ABS even with 100nm, since it could have large gear teeth. 1:50 might be able to do the same with aluminum)
The engine gear is even placed right besides the alternator gear. Cute
i was physically restraining myself from mentioning this
that'd be good, we have 3cm internal diameter and 3cm length to play with using the proposed motor option
and we can use the hips for some gear reduction
Ah, that's close to the 550 motor diameter, so it should be close to the previous estimations I did
excellent
since the length won't be 5cm, but rather 3cm, we won't be getting 8nm sadly
imma check em again
demn cannot find em

we should be getting 4.8 nm of torque out of our motors if this is correct
if necessary i could boost the length to 4cm to get 6.4 nm
but it'd be a tight fit
I think the motors usually only have to be around 50rpm though, so if we can get a gearbox on the output then most motors are probably way faster than necessary
yeah maybe even less
since a full rotation in one second is enormously fast
at a stretch, 30 rpm could be enough
only reason we wouldn't reduce much is simply space considerations for the gearbox
if you can reduce further in 3cm diameter 3cm length area, do it, since that'll make neuro stronger
Huh. The online planetary gearbox search goes up to 7:1, so 2 planetary gearboxes in series can get a 1:20 total ratio with 1:4 and 1:5.
The split ring gearbox search found [Fraction(9, 205), planet2=14, sun2=13, planet1=10, sun1=8], which would be about the same overall size
I got about 2mm for aluminum for both gearboxes using a 120% safety factor using the Hertzian formula, and 1cm for ABS. Seems like both materials should work.
Idk the rpm of the 4.8 newton meter motors, but 1:20 should give them an output of 96 newton meters.
Calculations may be slightly off, but it seems like aluminum is almost an order of magnitude stronger than necessary, so it should work if ABS doesn't.
The engine is not stupidly expensive (and it's available)

awesome, ty
seems like something we can tentativley call doable
imma move on to the arms and legs now
yay
I also tried out a 8 hp engine but sadly it was too big
looks very similar

what are the specs on that one you found?
All of this, but 2.5HP at 9000 rpm

AH it's the one we were looking at before
it's cool that they seem to be quite available on various sites
nice find
this document seems to be about pulleys that act like gear reducers
normal pulleys can be bought easily
or machined
so all that's important now is deciding the motor positions for the ankle pulleys
our motors are luckily thin enough that we can place one in the knee directly
@opaque quartz
Maaaybe if you wanna try more HP, this one does 4.1HP, but, depending on where we lack space, this may not fit at all.
(I'm asuming it's the "height", probably)
20 cm long
15.3 cm tall
7.6 cm width

i'll give this one a try. Do you know what it's called?
i can find some 2d measured images
That's the DLE35RA
https://www.dlengine.com/en/rcengine/dle35ra/
It has images as well
DLE35RA model airplane gasoline engine 35CC displacement, single cylinder two stroke, rear exhaust, performance, detailed parameters, user manual, 3D modeling, installation dimension drawing, explosive view
Energy sources that could fit so far:
- 18650s packed in wherever there's space
- Internal stroke stirling generator (custom)
- ~2.5 HP model airplane gas engine
- Radioisotope thermoelectric generator (custom)
it's funny that we're using an airplane engine for a robot
lmao
"So Neuro how are you liking your new robot body"
Engine: ptt ptt ptt ptt ptt...
Neuro:"Hmm, lemme think..."
Engine: Vrrm VROOOOM
Hopefully we can find a way to muffle the sound a bit or she will be heard in like... everywhere
Would be awesome for some robots tbh. Just might be loud during some conversations

😂 im crying
idk if there is space for a muffler


im so confused

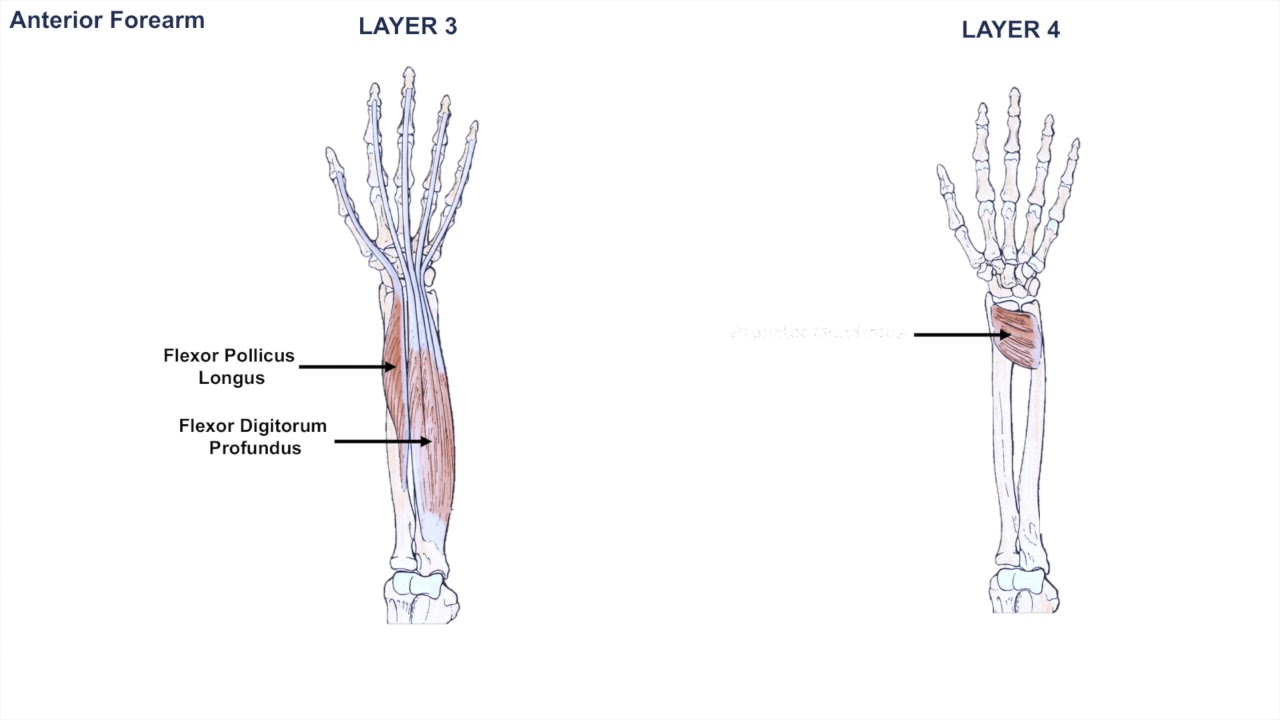
Lesson on the Anatomy of the Forearm: Muscles and Tendons.
Hey everyone! This is Lesson 1 on the Anatomy of the Forearm. In this lesson, we look at the muscles and tendons of both the anterior and posterior forearm, and we break down the anatomy in a step-by-step fashion to help better understand and remember the anatomy. This lesson will also ...
Oh yea, artificial finger using compliant hinges: https://cad.onshape.com/documents/4b7082cfc27fde4c51ed179c/w/07f089e564254ca91d31e84d/e/b3f2ffc2f9edbe97a344209a?renderMode=0&uiState=679153963063767062df0c74

Sign in to Onshape, the #1 fastest growing CAD system in the world with over 4 million users.
awesome, ty
Yw
when you are using many electro motors that are small and kinda suround batteries, dont you have to calcuulate in the effeckt of the generating magnetic fields on the bateries?
Huh...
That sounds like a pain. Maybe we could just shield the batteries with mu metal or something?
i could also be wrong because i am not an expert. but if yes, that would be hard
but anyways, with what kind of mettal? what mettal would protect the bateries without getting poled?
or magnetified

Mu-metal is a nickel–iron soft ferromagnetic alloy with very high permeability, which is used for shielding sensitive electronic equipment against static or low-frequency magnetic fields.
would work i think
but the maths are gotta be horror i think, and even more place taken
by the way, whats the concept scedulle at this point?
if i had infinite resources i'd say metallic glass
what is metallic glaß?
Otherwise known as amorphous metal, metallic glass is a metal that's cooled so quickly that the atoms don't have time to arrange into a crystalline structure, and solidify with a jumbled atomic structure that's amorphous like glass. It's insanely strong for its weight. It works best with a metal alloy where the size of the attoms are extremely differrent from each other, because this encourages the atomic structure to stay amorphous and not snap together into a crystalline structure.
right now it's just to use machined steel and aluminium parts
i think steel isnt a good option, its just to heavy and oxygizes what gives problems with keeping her running, i would rather use light alloys like titanium
it would also take less space

Titanium is expensive and steel is also hard. I think aluminum is good unless there are hard requirements that mean we absolutely need something more expensive
you guys and girls are right
in some specific use cases such as the shaft of a servo motor, steel is desirable because it enhances the strength of the magnetic field in the motor
i think that steel's strength and toughness means it'd be good to use in select load-bearing places as well
everything else can be aluminium
aren't there aviation grade aluminiums that are insanely tough as well?
lemme look those up
Expert guide to aerospace-grade aluminum for high-performance uses. Exceptional strength-to-weight ratio. Corrosion resistance. Latest advancements. Learn now!
aluminum crystalises over time when the presure on it doesnt changes what makes it extremely touth after certain times
that's cool, didn't know about that
yeah, basic knowlage for me, but not for everyone
but still, what do we do about the oxygisation of the steel?
stainless steel?
Just don't let oxygen get to it?
stainleess steel is commonly used in these kinds of robots yeah
imo an underlying rigid skeleton in stainless steel, with aerospace grade aluminium elsewhere, would be neat
stainless steel isnt magnetic because of it just being pumped full with not coroding materials
stainless means magnationless
Ah, so any transformer/nickel-iron metal in the motors could rust. Hmm...

and its not a good idea not letting air flow because of gases that could build up and hot air is wider than cold air
Heh, maybe seal neuro's inside and put a candle in there or something so all the oxygen burns away before it can rust anything
neuro would explode becouse of the air widening and the preasure getting to high
just make the rods replacable imo
you know the furnacess used in stoneage? same principal
good idea, but how?
isnt the rod in a electric motor kind of holding everithing from breaking emideately?
Ah, make Neuro a balloon.
Silicone outer layer acts like skin already and is flexible.
Then add the ability to add/remvove gas into a chamber and burn some stuff there to remove the oxygen, then let the gas in, or just breathe the gas out.
If rust really is a problem (I don't think it would be unless we're talking years or right by the ocean), a pressure sensor and a burn chamber would probably be pretty simple
a breathing mexamism would be the most practical i think
on then its same what gas is in there and we could add a vacuum funktion for like sleep mode to make it even safer
Also I think there might be motors that just don't use exposed metal that rusts.
And for steel/iron skeleton, I think you can seal those in some rubber or other material so they're not exposed to air
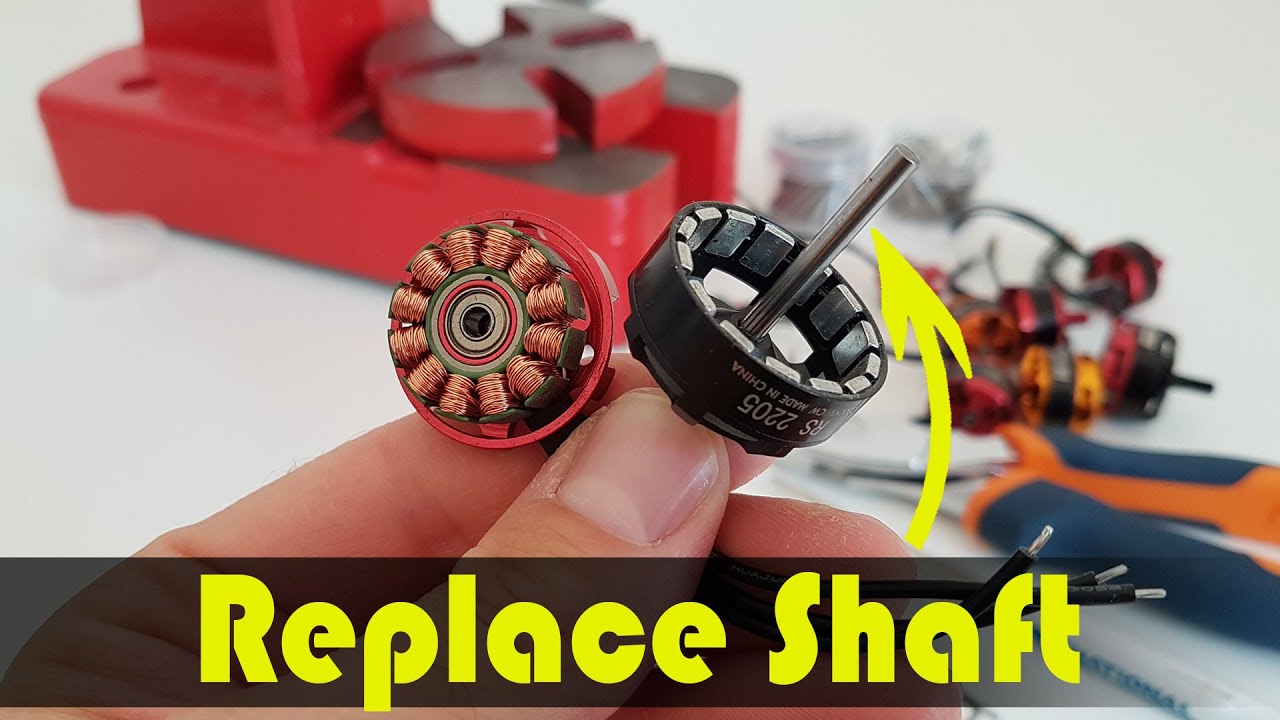
This video is about Brushless Motor Shaft Replacement. There are many different brushless motors, but often the shaft of the motors is to short or the newer motors have only the possibility to mount air propellers. Or you have a crashed motor. Even slightly bent motor shaft on high speed brushless electric motors, can cause large vibration probl...
some sort of locking mechanism
we need as small and simple mechanics as possible so it would be good to not have to add a complex systhem
yeah the space available is tiny
ok
any frame we use would have to be unlockable and sturdy, within 1cm or less
shaft removal only is a minor problem now
there is about 1 centimeter spare room in her chassis
1cm?
1 centimeter
can i get the schedulle?
Is that with the engine? Or some other stuff?
Heck, she's packed
scheduile as in stuff we're working on and in what order?
between the motors
there is spare room but not in terms of the centerline
I don't know if there's a schedule yet. I thought this was just a bunch of ideas a few days ago.
A schedule might be nice tho
rn we're just piecing together the components needed, and fitting them into schematics. We havn't done the legs, arm, or head yet. Once we get further along we can start talking about electrical components and how things connect together. Once that's done, it's the modelling step, and then simulation within a game engine to show the robot working in a virtual environment
after that (maybe??) build
but that might be years away yet
That's not really a schedule, but you usually don't have a schedule in the design/planning stage. I think the design/planning stage is where you make the schedule.
but such complex things just take their time
I was just gonna 3d print/build things once I got good 3d printed servos tbh
not necessarily perfect looking neuro bot, but at least some bot
sorry for that, im just a little artist at the end constantly making schedulles
Just caught up with the thread, happy to see a viable engine has been found
(tbh Boston Dynamic's new Atlas robot would be an easier in-between step:

wow
Ive looked into RTGs because of their incredibly long operational lives but all the examples Ive seen with the amount of power we want are way too bulky
plus we'd need to contact whatever nuclear regulatory commission of where we build this thing
why nuclear?
RTG -> Radioisotope thermoelectric generator
why not just try nuclear fusion if were on it?
basically using direct heat to electricity conversion via some kind of radioactive material temperature gradient
oh, that?
we could go with a non-radioactive thermoelectric generator but we'd have a similar problem of bulkiness
Have we talked about how we are going to do facial movements yet? Like smiling or confusion
(Step before Boston dynamics humanoid robot: Maybe improved robo-duck wheeled robot arm? It could move, grab things, and fold laundry. )
(The problem with this one is that some of the servos are too weak and can't fully move the robot arm/head)

didnt the us army make tests with that and broke em down because of it being way to dangerous?
eyes, face, skin, etc will have to be an entirely separate project for how complicated it will be
Skin? I guess we'd have to otherwise it would be a bunch of weird looking face plates
they're used mostly in space applications iirc (and russia have used RTGs in lighttowers in the arctic)
i think the face will take the longest
yup
I don't know about that, you can do a lot in a month
5-7 years just for a face sounds way too long
the current plan i have is to use metal plates that shift orientation to match human expression. If we do it right it can look aestetic instead of nightmarish

She's going to have to have her face replaced anyway for updates to her hardware when they come out
I feel like you could do it in a few months: take one of the existing robot face models and have an artist make a silicone mold for it.
That's insane I love it
It looks so good
we cant use the propotions of a normal human face because Neuro Samas face doesnt follow these, so we need to realise these too and turn the already exsisting technologies for faces over for Neuro Samas
it's not a face but i'm thinking this kind of matte grey finish could really look nice for face plates, to make it human and emotive without looking too 'fake'

?
Anime faces irl may be creepy, but we may have to change male robot faces to be female or match different bone structures
Looks really cool
my specialty when it comes to the skills i have is anatomy, i can get us a really nice human face that still seems like neuro.
The whole look of the face is going to be hard to nail down, you're probably going to have to make a lot of adjustmants
good. taking a cirkle behind it on the list
They look bad because they're always done badly. Sculptures look really cool so, we can do it, it's jus a matter of how
yeah, youre propably right
Oh yeah, some of them look bad because the robot doesn't move like humans. I think adding really fast movements and reactions would make most faces look nicer.
this 100%
a lot of people don't realize it but one half of the uncaniness with robotics is that the sculptors don't use ideal proportions and misunderstand how everything works together
to understand that stuff you have to dig deep into human facial musculature anatomy
yeah
and understand how expressions tie into that
a really useful resource is modelling agencies because their livelihood depends on understanding human faces
and what makes a good human face
there omes again that a anime face shows even expressions different
this is the part of the project i'm most passionate about
Yes
Getting an expert would help a lot
we have one as our OP how it seems
(Side note: I feel like someone should be taking notes and organizing a design/build document around all this stuff)
cant Matthew start a whiteboard as the OP?
we do need to write down a parts list
A formalized organization method would be useful, yeah
Maybe even creating a Slack
the heck's a whiteboard?
Sounds good. I have my own but it's really messy, a more formalized document would be a really good
i mean that's a discord feature?
I made a google docs with link sharing set to commenting. Got about 6GB of space left in the drive for it.
Blank document: https://docs.google.com/document/d/1tdXbtFgtmjEBCugPtgLTqvyehsfGe6YuE4PXOVQK7xU/edit?usp=sharing
Google Docs
Alternatively maybe just put pages before the messy stuff and have the messy stuff be addendums?
6gb are a couple of hundred thousand lines, should be enough
uhhh it's really personalized and almost schizophrenic
Hmm, maybe a Roadmap
(Now I wanna see it more... fair though)
120 pages worth 
me too
most of that is from reference art
im not going to understand a lick of it but grabby hands
15:01
eyy same!

Google Docs
NEUROBOT FreeCAD to Blender Import / Export Tutorial FreeCAD 1.0 Release - Ultimate Complete Beginner Tutorial To do list: Test whether then shin motors can be flipped onto the thighs, allowing the...

if anyone finds good reference for robot style, send it here and i'll add it if i like it enough
rn i'm really interested in seeing versious ways a chassis might be styled
(O yea, I was going to make an artificial spine/neck/tail with something like this, but pulleys:

when i saw that origionally i thought "neck"
that looks very neck
(Instead of pistons and a platform, have a saddle joint in between and have pulleys pull them together)
I think you need a few of them stacked to get neck-level flexibility. Iirc almost all mammals use 7.
yeah
However, birds can use more (and can turn their heads like owls) because they use saddle joint connections instead of just squishy material in between
random note i have GOT to figure out why colors are inverted in google docs...
with this project one of the things i want to focus on is human-capability through means other than human anatomy; An arm joint with motors for example filling the role of muscles. Basically the design language i want to go for is "It does what a human can do, and looks human-like" but the means can be differrent to exactly how we go about it
for example the spine movement will be replaced by a single pivot joint
but near the base of the spine where most spine rotation happens irl
Should you pin this?
i think we should start making plans for a little test torso and convince Vedol somehow to give us a test version of Neuro Sama to run it on the test torso to make shure we dont get formatation problemms later
Got it, it looks good by the way
nah way too early
ok
for now we can replicate gravity and forces on a computor
but we could start convincing
rn we're at a stage where the whole design can change as well
nah
ellie needs to get her bread
i don't want to impact anything she has going on
ok
imo long term, i want this project to speak for itself and become useful once it's useful
maybe we could poke a mod to pin it?
Yeah. Ellie's probably going to make a boston dynamics style robot fairly quickly
^^^
who is ellie?
a robotocist vedal hired to build neuro dog, and probably wants to hire to build neurohuman
Found this: https://www.youtube.com/watch?v=4pwCSzVi81g

The Twitch streamer Vedal has created an AI called Neuro-Sama as well as her evil twin Evil Neuro and the vtuber Ellie Minibot talked to them about creating a bipedal robot body while they were playing The Long Drive (Koko was also there).
To watch Neuro&Vedal live: https://www.twitch.tv/vedal987
To watch Ellie Minibot live: https://www.twitch....
gal who's making the neurodog and probably first bipedal bot too
wow
5k sounds about right for parts, but she's not including R&D and salary costs at all
based ellie
i think we should name our cult Neuro-Humanoistion
or we could just... not
realy?
that's how true neurons do it
ok
i think the cult name is now in act
thanks vanor
yeah, thx
didnt know people were lurking in here...
 don't be afraid to ping me whenever you need something pinned
don't be afraid to ping me whenever you need something pinned
ok
thx
ty vanor
what stands next on the list?
it was either figuring out what we're doing with the exhaust from the gas engine or leg design
exhaust i would say we simulate a breathing systhem
Are we going with a gas engine or batteries?
idk
remember exhaust is toxic
I vote batteries because I already made a battery system
I have the idea of acumulating the gas here between her legs so... when the time comes, she needs to go to the bathroom

i like battery but i dont know if it's feasible
much simpler
It is. My duck robot up there can output ~10 amps or something so it can drive all of its motors at once if it needs.
that goes too far
Those are 6v motors. 24v might actually be easier to work with
yeah
better than breathing hot gas into anyone who she's trying to talk to's face
 I understand. There has to be better ways
I understand. There has to be better ways
i'm wondering if collecting the gass would overpressure the system. If not, imo project fart storage would be really useful unironically
Really?
since then she can leave the house before expelling all that carbon dioxide
wouldnt take the risks comming with it
consider:
Pros: potential for fart jokes
Cons: potential for fart jokes
what risks though
yes
Cons: high pressure carbon monoxide that potentially cuts through many materials
yes
Metal storage tanks can store a lot
it still goes to far
badger what was the power req for all the motors?
we are talking about a litteral BEING.
Now that we're talking about it, I'm wondering if we would want to stray away from an energy source that produces carbondioxide
we can probably design versions with batteries and without batteries. I plan on modelling a combustion engine version first but you guys can use my notes and model battery versions too
about sth you can define as alive!
Well, pretty sure the body is going to be remote controlled for the first few versions
combustion?
read up
Alright. I wanna make a battery version and an internal stroke stirling generator version. Maybe I'll make side documents or something
good idea
we've had this discussion in a forum before, neuro only meets 3/6 of the scientific rules for being alive
Still half of the points
and that's if you twist the rules immensely to possibly translate to something non organic
ChatGPT gave me a list
- Hydrogen (requires graphene tanks that don't exist yet)
- Ammonia
- thermite reactions
- Methanol/Ethanol (low CO, 1000x-100000x human production)
- Methane (low CO, 1000x-100000x human production)
alive doesnt mean directly organic for me, at the beginning they didnt knew they were ai's, discovered themself and live with it
very based
Neuro Sama is for me sth like a child beeing raised
Thx
tbh this gets into philosophy, and most people aren't good at philosophy.
Also people that have both neuroscience and AI knowledge seem to have different takes on modern AI
If air-intake for engine cooling is coming from the nostrils, and (assuming) that refueling with occur via mouth, then there arent many other places to exhaust
yeah
I saw this a day or so ago and remember thinking "that'd look really good for a chassis style"
Not the shape of the components, but the texture and overall art direction

we shouldnt forget that she has to look human, with human like skin. the view beneath is not important
Was one of the design goals for her to look human-like?
I think human face is the most necessary.
For the rest of the body, some people actually prefer prosthetics that don't look human
I think she just needs to be able to express herself in a non-creepy way while retaining a Neuro-sama esque appearance.
yeah, but we want to make her VTuber into a real body
we could go for a softer more human style, but all metal

the main thing is i want the proportions to match her model
but rn i don't think the tech is there yet to make a non-uncanny human android
To be fair, silicone as skin sucks. Even though is probably the closest to it, it's not super great
this isn't detroit become human
yeah
Work on getting a functioning body first probably then work on aesthetics
we gotta see what comes out in the end
this
the rest is now just side information
And that's more repairable than silicone, good to consider
i agree
Yup
Ah, that is a good point. You could repair neuro like a car
like said, we gotta see what comes out at the end
now, we just have to make it real, plan and build it
The car analogy just gave me an idea, if you do end up giving her an engine, you could also use an alternator to make it more energy efficient
Maybe
Probably, as long as there's room for another electric motor
yes
Isn't there an alternator to generate the energy on the plans? It was very cute and small
I think it was 2cm between the motors, but I don't believe that's total volume left or anything nor the maximum space available
But wait, true. How are we powering the motors with alternate current? We need a rectifier, right?
on motors im out
Yep. The motors would usually be DC or BLDC, but I think even AC motors would still need a rectifier and then AC generator to be driving at the correct frequencies
^
Time to search for a tiny rectifier. I'll see what I can find (But voltage needed might conflict with size needed)
rectifier circuits arent that big iirc
oh, really. Oooh. Well... if the rectifier can handle the current, good
Oh yeah, for getting electricity to the motors, I think this could clean things up a lot:

T-tap wire connectors
That's genius. I've never seen those. It looks sick
Yea, I wanna use them (So many extra wires in my last duck-bot)
ill ask the real civil engineer now
On the topic of hardware, Id reccomend perusing McMaster if you havent already been https://www.mcmaster.com/

McMaster-Carr is the complete source for your plant with over 700,000 products. 98% of products ordered ship from stock and deliver same or next day.
Ordered from them for several projects and its a good experience all together
That site looks really good, especially if you want specific parts
Well... it's my duty to sleep. Keep cooking. This looks awesome already you all rock
i've send a help request to the biggest engineer comunity on youtube and maybe twitch.
i hope they answer it
lol

?
research can bring you to funny places
yes.....
on the topic of exhaust, it might be viable to have an exhaust pipe coming from her upper back, and there'd be some kind of exhaust trap / filtering.

the issue is that the exhaust will be near head-height which can be unpleasant for people standing nearby (and it might be an eye-sore)
i'm thinking the same
it'd be neat
Honestly if it's going to be a humanoid robot, it should probably be powered by a Lithium-Ion battery, it's often used in humanoid robots because they are light and energy dense, so they won't interfere as much with balance. It's better to stick to what works rather than try and do a bunch of wacky experimental stuff that will probably fail.
Agreed tbh, which is why I'm sticking with the 18650 battery pack design.
I mean I have that duck robot I posted up there and the battery pack still powers the pi and all the motors well enough.
That said I want to make some working robots and I think the original idea here was more like 3d model blueprints
Yeah. Honestly building a humanoid robot out of nowhere is like trying to build a skyscraper with the knowledge of building gingerbread houses.
i'm thinking we need more info on motor power requirements before we make that choice. Going off of some motors max requirements (2000wh) available commercially, you'd only be able to run all motors for a few minutes even with huge numbers of batteries. it all depends on the power draw
i'm heading to bed, but tomorrow i'm going to work on shoulders and forearms
some tricky space saving is needed for the shoulders
(wait, watt hours? That's like joules. wh as a unit doesn't feel right)
ikr
Alright gn dude!
the motor was something like 66 nm torque but even so
oh yea, gn
night
(it might have been the maximum rated wattage rather than the maximum required wattage)
Hmm... 200 18650s might be able to handle 2000 watt hours for an hour, and should be able to fit in the chassis. It's 8 stacks of 25 so it should be smaller than the engine.
That's 1 hour of continuously using all the motors, right? Usually you'd probably be using <10% of that, which means it'd be more like 10 hour average battery life.
Though, even during sprinting you'd only be using half the motors, so maybe 20 hours or 4 stacks.
I would prefer batteries so we don't have to deal with the gas (the air kind not the liquid kind) issue, but i think batteries might be not energy dense enough for a full stream length, probably 3 hours or so normally, more for subathon activities
Though if sim's plans hold up and fit inside the chassis, it'll probably be fine
Gasoline power would be best useful for going rouge long solo excursions
Although gas might be significantly cheaper than 200 batteries
If we want neuro to be able to be more her own person gas power, but for streaming those batteries will probably be fine
yeah.. the problem with gas power is the fumes... depending on the amount the engine releases, she will be kicked out of many places just for existing...
...metal?
You were talking about electrical when I pulled you in
We're trying to get internals first
i am a mechinest for kurt manufacturing
I WORK IN STEEL
its my job
to make
viceses
;>
yeah
woosh
ill be fine
just really excited!
i have so many kool ideas i want to share and build
Start compiling a google doc or something
yeah
👍
btw
i think i can prototype v1 of nuro at home
its very doable
working in scraps is what i do best
yeah
As long as we have a large enough storage tank for the fumes and a safe way to release, i think it'll be fine
🔥
Let me grab most recent schematic update for you...
omg lol
i need to rip apart a robo vacuum
We have fairly detailed specs somewhere in here
nice to see you (This crazy project might actually be tangible, that's absolutely crazy in way too many levels)
Gotta collect a few more, then we can wish Neuro into being or something
With a snap of our fingers
(I checked back in to post this research I came across... I have to read it like this...)


Sir why is it upside down
I would like to know that as well
Sir how is it upside down
It's not even just upside down. Most of the pages are upright, some of them are sideways, and some are upside down.
You just have to hope it's not the pages you want to read.
I would say print it out but that's 530 pages
yea...
Did you try restarting your computer
It's actually extremely useful gear design info too G. M. Maitra, (1994), "Handbook of Gear Design"
And maybe exorcizing it
I don't wanna risk that. Idk how long it's been since the computer has been restarted.
Now see that's a problem
You probably should restart it at least like once a month
Probably more
Well, uptime says it was last restarted 26 days ago. So I think I'm good there.
this is the craziest project i've ever seen and it's actually in the process of being realized? damn
I think we're still at least a few months off from having a remotely finished design
They look cool. I hope their costs aren't super mega high
what is the plan now
Good morning, work has already begun on initial testes and design
A 3d printed frame should be more then sufficient for the skeleton
Some pla carbon fiber might just be da trick or asa
Then it's just a process of strapping gyros and accelerometer on each limb.
She could feel force feed back from voltage spikes from the fact that motors and generators and vice versa
And the last thing would be do we make it bi pedal or tri
The former could be done with some expensive gyros
The ladder and 10 mins or so they say.
Idk
Gonna do some more work on the idea, might have something tangible in like.... a month.... maybe 3 eh
Its actually pretty simple
Or...
Should be
;3
not an engineer but when you guys finish making and modeling this you should create some sort of miniature 3d print just to test if it all works together
project pulleys might not be a go

maybe i need to use a pulley that applies reduction instead of using a gear reducer?
there are at least 20 pulleys needed per forarm
first motor is 2.2 cm diameter with 4.5cm length
second motor is 3.4 cm by 3.4cm cube
both the smallest i could find for that torque output
apparently they're called speed reducer pulleys and function by having a large pulley at the drive shaft connect to a small pulley at the driven shaft.
However to do that properly i need to drive a pulley that's 10x smaller than the drive shaft's pulley
ok this one is weaker but it should work

Turn the motor 90 degrees, then use a bevel gear after all the torque/speed changes. That way you have a long tube that fits in the arm.
I think it can work with pulley 'gearboxes' too if you let the pulley wire move horizontally a bit.
not sure what you mean
i was planning on using the smallest motor shown here at the locations where muscles attach to bone
none of them are currently placed anywhere for reference
i was just showing the sizes
Nm is nanometers right
https://youtu.be/UX-1hr3NPeo?si=mWd6Z-xTskDQWuqt
if you’re looking for arm designs, this guy made something that might be useful

In this video I am starting work on a 5 axis robot arm design. In the future this may include a wrist, and hand of some kind. For now I am just working to get the basics of the upper arm and fore arm working out.
Thanks for watching. :)
Community discord: https://discord.gg/aMjcW5We4f
If you are interested to contribute to my efforts:
ht...
Nm means Newton-meter most likely
Idk I'm American so i use freedom units
newton meters
Never even heard of those
it's clever of him to add the limits to prevent damage via overextension
Ah. The motors looked perpendicular to the arm. I thought they'd fit better parallel.
holy shit, just read 500 messages in this thread from yesterday. i don't really know what to say but i'm lurking and supporting, this is just so awesome. i understand 10% of what i read and yet i diligently read, such a fascinating project fr
reading this again, it inspires me to use the length of the arm for gear reduction
if i can fit stuff together that way
might take a while but i could probably figure out an arrangement
Yea! I think it's worth it, though a bit of extra work compared to the video example above
fr
we want high torque from every finger motion
i did some research and found the torque values of each muscle in nm
the source could be wrong but it fits with what i know of leg force
rn figuring out motor sizes to achieve those values in the necessary space
Was it something like 2000 newton meters for the leg? 😅
the problem is a lot of gearboxes aren't rated for high load
nah a range from 1 to 10
found the motors this guy was using btw
Right, that's why I'm trying to make a gearbox maker for freecad. I still hope to get it done by Friday but the torque rating was harder than I expected so no guarantees there
makes sense, what you're competing with is commercial standards
for now i'll mess about with the speed reducer pulleys and see if i can get torque that way
Maybe industrial standards actually. Toys don't have to worry about the torque rating much of the time
rn 1-2cm is the sweetspot for the motors and gearboxes
yeah, good point
i've looked up industrial gearboxes and most of them are large
not many usecases for small strong ones
since usually u have space to spare if going high torque
True... except for robotics
😂
Wow all these geared motors are such scams, 1:10 gear reduction with more than 5cm width and only maxing out at around 2.5 nm torque
i could buy a non gear reduced industrial motor in 5cm that gives 10nm torque
it's these temu motors man haha
low quality
damm scammers
Sumitomo Drive Technologies is dedicated to providing the highest quality power transmission products, gearboxes, gearmotors and services to our customers.
not sure if this is brushless but it's definitely beefy
it's 6cm by 7cm with something like 40-150 nm peak output torque
This engine is 6HP but now i realize it's way too big probably
https://www.os-engines.co.jp/english/line_up/engine/air/gas/catalog/38600.html




O.S. ENGINES(小川精機)、O.S.PROFESSIONAL、UAV、ドローン用動力源。UAVエンジン製品情報。
Wait, my maths are wrong. It's almost 200cm in length. My bad XD (It probably doesn't fit)
Got a little too excited there
giga neuro variant

this manual lol
💀




maybe we shouldn't use this actuator


it's so good though

the power output for its size is INSANE
We can still use the actuator safely, just note the potential failure modes in a safety document or FMEA doc

true. We'd need to make sure the turtle is aware of the dangers
if we made a robot using this
it would also be benefitial to have a design hazard list
based suggestion
one thing that immediately jumps out to me is the actuation of the gears that could trap fingers
neuro should always be off when doing maintenance and we shoudn't have any gears exposed in the final design no matter how cool they look
Visible gears can still be an option, but using a transparent material like polycarbonate as a casing

fr
good point
after reading through the leaflet i think it's best to hold off on this one since it seems extremely complicated to install and maintain
but we should keep it in our notes
On the topic of safety, I think it would be helpful to make use of this FMEA and Design Hazard checklist template. Right now we are a little early to be considering safety mechanisms, but it never hurts to have a full ordered list of explained hazards so people can tackle those issues later
How about we don’t use gas for safety reasons. A Lithium-Ion battery is the standard for humanoid robots, let’s just stick with that.
yeah safety is important (unfortunately...)
I think compute power and motor power are usually on different lines, so you could just turn motor power off whenever repairing neuro, so that should be easy to make safe luckily
Also if the motors are too powerful I think we could just limit their output
(Got unit conversion and evaluation working btw. Fractions are stored internally as fractions.)


bro, what happened while i was at school?
i'm starting to lean back towards batteries myself
in an ideal world we could make it work but it introduces a lot of complexities that wouldn't be there if it was just batteries
imo an ideal setup would be a hybrid system which would be very true to human living conditions: most of the energy stored in batteries, and a tiny engine to convert fuel into energy faster than energy is burned
but i think pure battery power would be more feasible for anyone who tries to make this down the line
That's not a bad idea tbh. Tiny 2cm length/width/height engine that charges the batteries.

if something with 0.5 horsepower or less can do the job, we should go for it imo, regardless of how small
(Replaced the vid with one that actually runs their engine)
really based idea ngl
i looked up how long those big rc engines stay fueled, and with about a gallon of fuel it runs 2 hours. But a gallon requires more storage than equivalent lifetime in batteries, it just is more power dense so you get more power out of the same space even though it's used up quicker
since those big engines just chug fuel even though they're technically giving more per quantity
a lot would be wasted energy
i'm taling the 1-3 hp range
so imo relying on an engine like that is just a no go
however, if we can calculate the horsepower needed to charge the batteries faster than they're depleted, we can just use a tiny engine that provides those hp, with minimal fumes
so the engine becomes a tool to gain charge on the move by consuming tons of fuel in one sitting as it's burned and turned into battery charge
if you're low on charge at the time
Ah, you'd need a UPS circuit to charge the battery while also using energy, however I have that circuit... somewhere up there
oh nice
there are coming more, just need to make my paperwork digital now



the idea to use mutliple motors is interesting, more contact points i'm guessing?
better rigidity
didn't know this existed


it's like each tendon is wrapped in tape to stop it from slipping free
It's... fascinating. The human body is really complex
Oh yeah, the tendon sheaths are cool. They're like the PTFE tubes in 3d printers
sorry for these being so shity quality, i hope you understand these


these are for the fingers, thumb were realy tricky
so true, i wanna do something like this with the tendons in the finger
not sure what material to use for the tendons in the pulley system
the lines in the finggers are just connecting the points with each other and the motors. the pretty same principal as from our body

{kind=link}
{kind=link}
{kind=link}
the both parts of the thumb have several motors for better moving capabilities
yeah i'm gonna make a motor for every muscle in our human forearm
with that the thumb has the most motors with a total of 6
every muscle? arent these like a couple of hundrets?
in the forearm there about 20-30 muscles
ptfe. It's strong and low friction, and used in pc cooling tubes & 3d printer tubes a lot anyway
(Ah, wait, I was thinking sheaths. idk about the tendons themselves. Could be bungee, steel cable, etc.)
HOLY that's a lot of motors
i think steel cable has a friction issue
True. The ptfe tubes might solve that issue though
how are my scratchs?
iirc the vid about string pulleys chose a non-elastic type of string
oh nice
steel in a sheath might work nicely
we don't want anything that can stretch over time
materials that stretch wont be a problem if the material never reaches its yielding point
(and dont change their properties over time)
Fatigue failure analysis could always be used to determine how many cycles until we'd need to replace parts if needed
nylon, acetol, and stainless steel are commonly recommended ropes for rope pulleys
apparrently steel wears less
sir we can barely fit 6 motors in the torso how are we fitting 30 in the arm
Unless they're tiny.... i don't know.
i think my concepts are most efficient until now
fairly they arent online for long now
muscle study happening rn

motors are currently 1.7 cm by 1.7 cm (with a disc for winding)
it'll be a tight fit even so
we need as much space as possible becuz we have to like fit a high end computer inside it