
#Missing physics part
26 messages · Page 1 of 1 (latest)
Can you please teach me how to rig models
Try reapplying shade smooth on the physical model.
That's important.
didn't work
By the way. Reduce your poly count on your physics mesh. The ones in half life 2 only have a couple hundred polygons.
😤🙏
is this better

Good enough, thank you.
As for the missing arm. Check your compile log, also check your blender material names or vertex weights on your physics mesh.
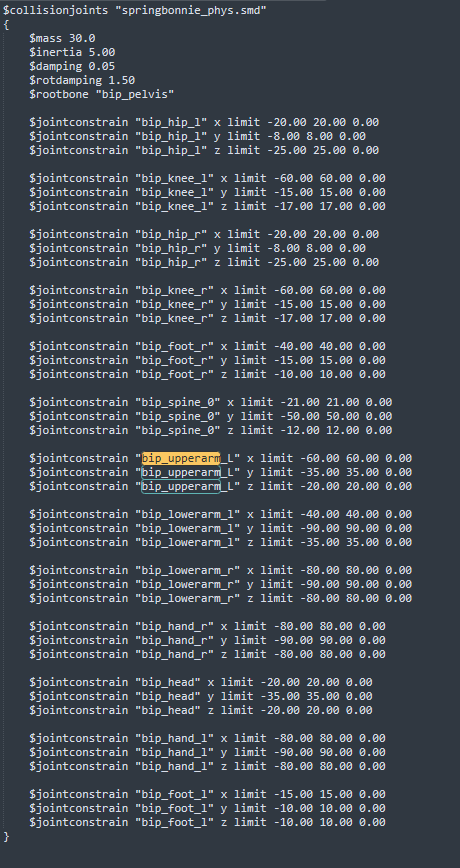
can you send $collisionjoints properties?
oh
{kind=link}
I didn't see that
Well, that's okay, it happens sometimes.
didn't work
send again
$collisionjoints "springbonnie_phys.smd"
{
$mass 5.0
$inertia 5.50
$damping 0.10
$rotdamping 0.10
$rootbone "bip_pelvis"
$jointmassbias "bip_pelvis" 10.00
$jointrotdamping "bip_pelvis" 0.10
$jointmassbias "bip_hip_r" 40.20
$jointconstrain "bip_hip_r" x limit -35.00 41.00 0.00
$jointconstrain "bip_hip_r" y limit -20.00 30.00 0.00
$jointconstrain "bip_hip_r" z limit -60.00 10.00 0.00
$jointmassbias "bip_knee_r" 40.20
$jointconstrain "bip_knee_r" x limit 0.00 0.00 0.00
$jointconstrain "bip_knee_r" y limit 0.00 0.00 0.00
$jointconstrain "bip_knee_r" z limit 0.00 130.00 0.00
$jointmassbias "bip_hip_l" 40.20
$jointconstrain "bip_hip_l" x limit -41.00 35.00 0.00
$jointconstrain "bip_hip_l" y limit -30.00 20.00 0.00
$jointconstrain "bip_hip_l" z limit -60.00 10.00 0.00
$jointmassbias "bip_knee_l" 40.20
$jointconstrain "bip_knee_l" x limit 0.00 0.00 0.00
$jointconstrain "bip_knee_l" y limit 0.00 0.00 0.00
$jointconstrain "bip_knee_l" z limit 0.00 130.00 0.00
$jointmassbias "bip_foot_l" 40.20
$jointconstrain "bip_foot_l" x limit -23.00 0.00 0.00
$jointconstrain "bip_foot_l" y limit 0.00 0.00 0.00
$jointconstrain "bip_foot_l" z limit -22.00 50.00 0.00
$jointmassbias "bip_spine_0" 40.20
$jointconstrain "bip_spine_0" x limit -17.00 17.00 0.00
$jointconstrain "bip_spine_0" y limit -17.00 17.00 0.00
$jointconstrain "bip_spine_0" z limit -10.00 25.00 0.00
$jointmassbias "bip_upperarm_R" 40.20
$jointconstrain "bip_upperarm_R" x limit -50.00 50.00 0.00
$jointconstrain "bip_upperarm_R" y limit -45.00 50.00 0.00
$jointconstrain "bip_upperarm_R" z limit -100.00 15.00 0.00
$jointmassbias "bip_upperarm_L" 40.20
$jointconstrain "bip_upperarm_L" x limit -50.00 50.00 0.00
$jointconstrain "bip_upperarm_L" y limit -50.00 50.00 0.00
$jointconstrain "bip_upperarm_L" z limit -100.00 15.00 0.00
$jointmassbias "bip_lowerarm_l" 40.20
$jointconstrain "bip_lowerarm_l" x limit 0.00 0.00 0.00
$jointconstrain "bip_lowerarm_l" y limit 0.00 0.00 0.00
$jointconstrain "bip_lowerarm_l" z limit -160.00 10.00 0.00
$jointmassbias "bip_hand_l" 40.20
$jointconstrain "bip_hand_l" x limit -50.00 50.00 0.00
$jointconstrain "bip_hand_l" y limit -35.00 35.00 0.00
$jointconstrain "bip_hand_l" z limit -50.00 50.00 0.00
$jointmassbias "bip_lowerarm_r" 40.20
$jointconstrain "bip_lowerarm_r" x limit 0.00 0.00 0.00
$jointconstrain "bip_lowerarm_r" y limit 0.00 0.00 0.00
$jointconstrain "bip_lowerarm_r" z limit -140.00 10.00 0.00
$jointmassbias "bip_head" 12.00
$jointinertia "bip_head" 10.00
$jointconstrain "bip_head" x limit -5.00 5.00 0.00
$jointconstrain "bip_head" y limit -3.00 3.00 0.00
$jointconstrain "bip_head" z limit -5.00 5.00 0.00
$jointmassbias "bip_hand_r" 40.20
$jointrotdamping "bip_hand_r" 0.50
$jointconstrain "bip_hand_r" x limit -50.00 50.00 0.00
$jointconstrain "bip_hand_r" y limit -35.00 35.00 0.00
$jointconstrain "bip_hand_r" z limit -50.00 50.00 0.00
$jointmassbias "bip_foot_r" 40.20
$jointconstrain "bip_foot_r" x limit -7.00 23.00 0.00
$jointconstrain "bip_foot_r" y limit 0.00 0.00 0.00
$jointconstrain "bip_foot_r" z limit -22.00 50.00 0.00
}
try this
If it doesn't work, send me everything to compile and I'll try to do something.