
1 messages · Page 1 of 1 (latest)
Hey gang. I hope you're all well.
I've been asked to make another stewart platform like https://www.marginallyclever.com/products/rotary-stewart-platform-2/
but the customer wants the steppers with feedback to ensure precision.
I was looking at SERVO42D and https://www.youtube.com/watch?v=ecmG-Qz5V3g seems to be saying it's not that great.
Is there some better config you'd recommend?
I'm definitely looking to lose the limit switches of the v2 and replace it with Stallguard homing.
As far as I know this is the only ready-to-go Stewart Platform on the internet.
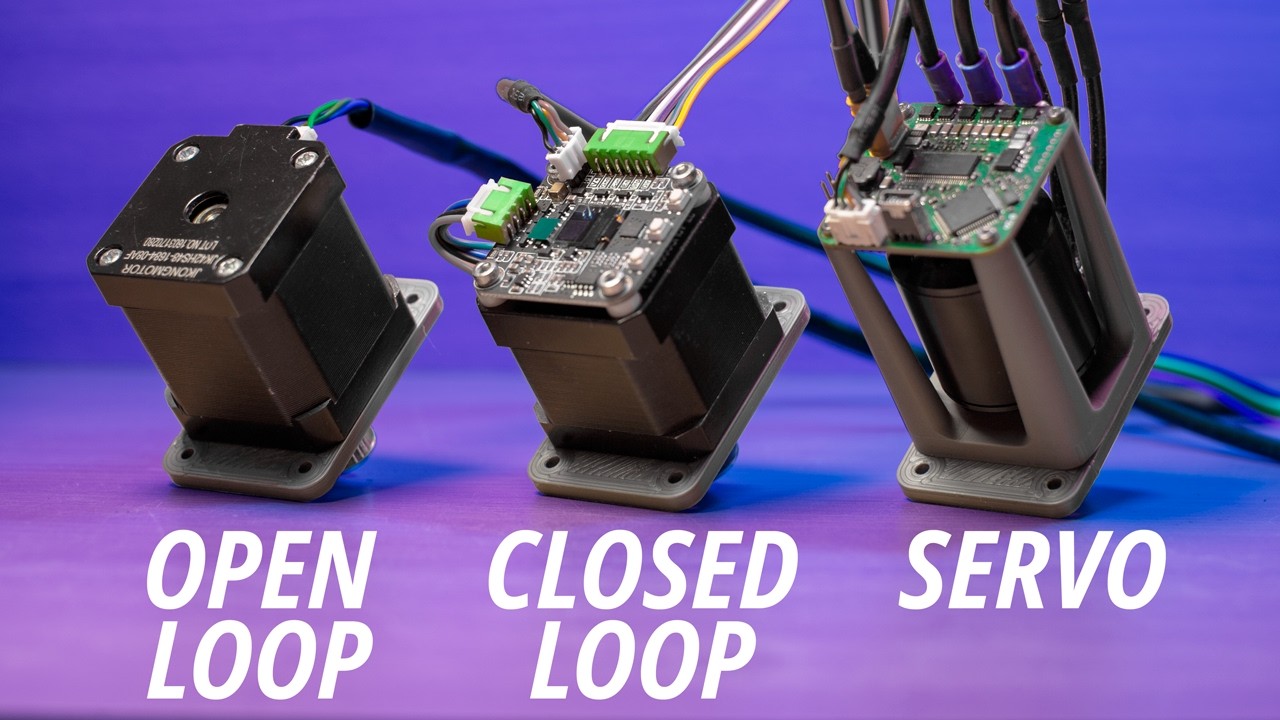
The MKS SERVO42C closed-loop stepper system can be found at a reasonable price, but how does it stack up against open-loop steppers we know and love, and how does it perform compared against a servo system?
In this video, we put all three motion systems to the test. We look at the power and thermal performance, and run stress tests to find the ...
You're in the right place to get advice. It's pretty rare to use closed-loop steppers with feedback with Marlin but we do have an i2c encoder feature in there for this kind of thing. The ones that handle feedback and correction themselves to ensure positioning (typically servos) will require less work tweaking the firmware. I'm not sure how Trinamic drivers will interact with a Servo w/r/t stall detection since they are typically looking at real coils with electrical feedback.
Uh… so you advice is…?
I'm not qualified to give deep advice on this topic. But someone here might know more about these component variants.
Where else might I ask?
The more nerdy code people hang out in the Developer channels. The more mechanical electrical people tend to linger around the Community channels.
Just to confirm... I can use the StallGuard to home with a servo42d? can i request the angle value from marlin at any given time?
please forgive me for getting dumber with age.
I guess it wouldn't be stallguard.
UGH. my project needs sensorless homing (eg no separate switch) and - ideally - real time angle reporting.
since the servo42d is its own stepper driver and stallguard is a tmc stepper drver feature. no you can't have tmc stallguard with it. It does however have an equivalent

you would need to add advanced comunications into marlin
but,,,
What the MKS SERVO42D actually provides
It has two separate control models:
so since marlin is a step/direction engine and in that mode it has no feedback system
I can see no way to do "sensorless"
without a extreamly massive rewrite of marlin to support non step/dirction control.
I suspct it would be relitively easy to update the code in the SERVO42D to add in a stallgard like io pin, but sadly no source...
Hey all. I've been out of the game a minute. I've got bugfix-2.1.x firmware for a BTT_SKR_PRO board. I'm trying to build and upload in VSCode. All it tells me is "failed in 8 seconds" even tho I've disabled silent build.
I seems to be failing because it can't find C:\Users\[me]\Documents\GitHub\Marlin-polargraph\.pio\build\BTT_SKR_PRO
I also can't seem to get platformio to install anything for this board.
what did I miss, please?
Delete the .pio folder in the project folder, clean up your $HOME/.platformio folder, and see if that helps.
ah, i think my "default_envs" in platformio. was wrong.
still failed but at least now it did a lot more stuff...
You are not using Auto Build Marlin? With that the env is set for you, so you can leave platformio.ini unedited.
mftest -a also picks the env for you, or asks if there are more than one.
Remember I've been out of the loop for a minute. when i last used this thing auto build was new. I tried using auto build and it didn't play nice. i just deleted .pio and I'm building again now.
building....
seems positive so far....

Good news! I will make sure my support robot knows this is a possible solution.
Looks like you're building one of them there cute robots.
yes, clearing out .pio allowed it to build.
it's a "rotary" style stewart platform. i used KD310 magnetic ball joints so it can disassemble/fail unspectacularly
RUD will not be a total game stopper.
the hope is to use stallguard to home off the table surface.
That should work if it's got some weight.
we shall see! It's testable.
now i can't remember if i can upload firmware via USB on this thing...

thanks, iphone, nobody wanted it upside down.
any idea what that wifi module name is in the config? the wifi board is adjacent to the grey USB plug at the top fo the image.
next to the two red lights
Hrm.
Only AVR boards accept firmware upload via USB.
thanks. I'm in the VC showing the live machine, if that's of interest.
i set the stall sensitivity to 8... activated sensorless_homing....

/**
* Default Axis Steps Per Unit (linear=steps/mm, rotational=steps/°)
* Override with M92 (when enabled below)
* X, Y, Z [, I [, J [, K...]]], E0 [, E1[, E2...]]
*/
#define FULL_STEPS_PER_ROTATION (200)
#define MICROSTEPPING_LEVEL (16)
#define MICROSTEPS_PER_ROTATION (MICROSTEPPING_LEVEL*FULL_STEPS_PER_ROTATION)
#define DEGREES_PER_ROTATION (360.0)
#define MICROSTEPS_PER_DEGREE (MICROSTEPS_PER_ROTATION / DEGREES_PER_ROTATION)
#define DEFAULT_AXIS_STEPS_PER_UNIT { MICROSTEPS_PER_DEGREE,MICROSTEPS_PER_DEGREE,MICROSTEPS_PER_DEGREE,MICROSTEPS_PER_DEGREE,MICROSTEPS_PER_DEGREE,MICROSTEPS_PER_DEGREE }
curiously, it doesn't move after that. doesn't even activate on M17.
If I then call M92 X8 or M92 X9 it activates and homes.
so there's something funny going on with fractional steps?
Is it normal to home Y before X? If I have one motor attached it homes X first. If I have two motors attached it homes Y first. I'm not sure if it already things X is home.
I will get a bigger power supply to rule out that possibility
Y (B) may be homed before X (A) with some kinematics. Delta “only” homes Z, which effectively homes XYZ.
quick search of the code doesn't show where to find the kinematic model set.
hint, please?
DELTA, POLARGRAPH, and COREXY are all undefined
What’s the kinematics of a Stewart platform? Add that kinematic to Marlin first, I reckon, if you want XYZ based positioning.
I believe I leave the kinematics as 6 independent axies.
I do all the kinematic calculations on the PC and then send only the final gcode.
I see. So they all “home” to their own 6 sensorless endstops. And that is your known position.
that is the plan.
The advantage of doing kinematics in Marlin is much more efficient G-code. One coordinate for a linear interpolated move instead of needing to send many small segments.
I would love to do it that way, but my math isn't good enough to write an efficient kinematic solver on the board.
Cool thing is an agent like Hermes can do it for you. 😁
I'll get the hardware working and get back to you about that.
I did a “no code” developer day today, adding more skills to Hermes to be able to understand configurations. It is just about ready after this one session to create or upgrade Marlin configurations for users upon request, with back and forth discussion, if needed.
sounds great!
By “no code” I mean, the agent did all the coding while I just chatted with it via Telegram on my phone, wandering around Austin on a warm day.
It also updated all the config documentation, which I will post to the website shortly.
M122
10:04:16.234 > X Y Z I J K
10:04:16.235 > Address 0 0 0 0 0 0
10:04:16.235 > Enabled false false false false false false
10:04:16.282 > Set current 250 250 250 250 250 250
10:04:16.282 > RMS current 244 244 244 244 244 244
10:04:16.330 > MAX current 344 344 344 344 344 344
10:04:16.389 > Run current 7/31 7/31 7/31 7/31 7/31 7/31
10:04:16.389 > Hold current 3/31 3/31 3/31 3/31 3/31 3/31
10:04:16.390 > CS actual 3/31 3/31 3/31 3/31 3/31 3/31
10:04:16.438 > PWM scale
10:04:16.438 > vsense 1=.18 1=.18 1=.18 1=.18 1=.18 1=.18
10:04:16.486 > stealthChop true true true true true true
10:04:16.534 > msteps 0 0 0 0 0 0
10:04:16.582 > interp false false false false false false
10:04:16.630 > tstep max max max max max max
10:04:16.678 > PWM thresh.
10:04:16.678 > [mm/s]
10:04:16.678 > OT prewarn false false false false false false
10:04:16.726 > pwm scale sum 4 4 4 4 4 4
10:04:16.774 > pwm scale auto 0 0 0 0 0 0
10:04:16.822 > pwm offset auto 36 36 36 36 36 36
10:04:16.870 > pwm grad auto 14 14 14 14 14 14
10:04:16.918 > off time 3 3 3 3 3 3
10:04:16.966 > blank time 24 24 24 24 24 24
10:04:17.014 > hysteresis
10:04:17.014 > -end -1 -1 -1 -1 -1 -1
10:04:17.061 > -start 1 1 1 1 1 1
10:04:17.110 > Stallguard thrs 8 8 8 8 8 8
10:04:17.110 > uStep count 128 128 128 128 128 128
10:04:17.158 > DRVSTATUS X Y Z I J K
10:04:17.158 > sg_result 0 0 0 0 0 0
10:04:17.206 > stst
10:04:17.253 > olb
10:04:17.302 > ola
10:04:17.349 > s2gb
10:04:17.398 > s2ga
10:04:17.446 > otpw
10:04:17.495 > ot
10:04:17.543 > 157C
10:04:17.590 > 150C
10:04:17.638 > 143C
10:04:17.686 > 120C
10:04:17.733 > s2vsa
10:04:17.782 > s2vsb
10:04:17.830 > Driver registers:
10:04:17.830 > X 0xC0:03:00:00
10:04:17.838 > Y 0xC0:03:00:00
10:04:17.845 > Z 0xC0:03:00:00
10:04:17.854 > I 0xC0:03:00:00
10:04:17.862 > J 0xC0:03:00:00
10:04:17.870 > K 0xC0:03:00:00
10:04:17.878 >
10:04:17.878 >
10:04:17.878 > Testing X connection... OK
10:04:17.886 > Testing Y connection... OK
10:04:17.894 > Testing Z connection... OK
10:04:17.901 > Testing I connection... OK
10:04:17.910 > Testing J connection... OK
10:04:17.918 > Testing K connection... OK
10:04:17.926 > ok```