#tinyusb
1 messages · Page 1 of 1 (latest)
@mjan-jansson, inspired by your last comment, I created https://github.com/raspberrypi/pico-feedback/issues/265 .
Also, it made me wonder what the behavior is for data sequence errors, as that's also not well specified.
Interesting. If I read the source code correctly, double buffering is disabled in device mode in TinyUSB for RP2040 (see roughly line 180 in rp2040_usb.c). I'm not sure I understand the rational for that. I am assuming it does not affect my use case other than performance. It would nevertheless be most interesting to learn more about this.
I'm experiencing the same issue after recently updating tinyUSB and moving to the dwc2 driver. I'll have a quick look through the new driver to see if it's anything obvious but might revert to the old driver to keep the device working for now.
In case anyone is still looking into this; I've updated the comment section above about tests with another board as the host (a H5 based board from FriendlyElec). No problems there either. Given other problems with the USB stack on Raspberry Pi (e.g. https://forums.raspberrypi.com/viewtopic.php?t=245931) I'm writing this off as a hardware specific RPI issue, and I do not have the tools to investigate any further.
Thanks for the update, yes... I think a USB-analyzer is needed for for efficient debug. I did run the code on RP2040 with a Windows 10 host, and with a small amount of testing, could not reproduce.
Can you be specific on which
- esp32 boards are testing with
- which example you are building
Howver, I don't see why would tud_cdc_rx_cb() has to be invoked when copying file to msc. cdc & msc are 2 separated classes.
You are correct, i was meant to test CDC functionality, i am closing this issue.
Removing the line below seems to resolve the issue for me. May someone else please confirm this also works for them. I'm running in HS mode on an STM32h742 (custom hardware). https://github.com/hathach/tinyusb/blob/fd5bb6e5db8e8e997d66775e689cc73f149e7fc1/src/portable/synopsys/dwc2/dcd_dwc2.c#L525
Since setting up a new project takes some time, I decided to look further into the composition of my descriptors.
I am sure they contain correct data since I checked them multiple times.
The only real difference is that in the device descriptor I set .bcdUSB = 0x0210 or .bcdUSB = 0x0200 respectively.
Here is some log output which hopefully helps with understanding my issue:
.bcdUSB = 0x02100 (not working):
[bcdUSB_0x0210.txt](https://github.com/hathach/tinyusb/files/9196051/...
In attempting to compile this, perhaps I'm unable to find definitions for TUSB_ERROR_NONE for some reason. Is this some external library?
Hello PanRe and Hdo,
Thank you for sharing all these goodies,
As a beginner, if I want to do a project like 2Channel USB Microphone with Pi Pico(Rp2040),
is there any suggestion to begin? Since I have no experience with USB Audio devices.
I kind of forgot about this bug-thread, but the Arduino-ESP32 people have agreed they see my issue in the library here using this example:
https://github.com/espressif/arduino-esp32/issues/6221#issuecomment-1090173420
and
https://github.com/espressif/arduino-esp32/issues/6221#issuecomment-1138671766
They also say the same issue happens in their IDF using the SuGlider's python test module posted in that thread:
https://github.com/espressif/arduino-esp32/issues/6221#issuecomment-1126...
this PR is closed, please don't post question here. Discussion is better place to ask for help and tips.
Describe the PR
The Renesas RX controllers possess system-wide write protection for certain registers. Setup functions within the tinyUSB stack have to disable this write protection. This happens in order to disable the USB hardware's module stop function (e.g. MSTP(USB0) in dcd_init).
I changed the the write protection register's value handling in a way that the previous state is recovered. This leads to a more intuitive behavior of tinyUSB's initialization code
**Additional con...
I spent some time with this port trying to understand the reason for the NAKS. Is it possible that the issue could be in the MSC layer? Here is a capture from a failure, I can't really understand the NAK. Also included a good capture from elsewhere.
usb-captures.zip
.
ping @P33M , in case he has any interest in investigating this further.
@Iktek Is there any change you or perhaps others @hathatch are/have been working on getting this to work or made any progress since the last post?
@rolandvs, It's not really on my list of things to do, since I'm not that interested in media streaming. I don't think anyone else has worked on it.
I have, however, been thinking about the implementation of double-buffering, and using FIFO for data transfer, and ISO should be simple after double-buffering is implemented. I'd like @hathach's input on how endpoint configuration could be implemented: How should an application request that an endpoint be double-buffered or not, and also allow...
Thanks for your quick reply! Ok, we have a need to get this running on an G491. Is it OK to drop a few questions as you have pursued this subject before?
Thanks for your quick reply! Ok, we have a need to get this running on an G491. Is it OK to drop a few questions as you have pursued this subject before?
Sure (I wrote the stm32fsdev driver here...), as long as they are related to ISO... otherwise, we could open a separate discussion.
Switched to head and it also seems to be working with the fix above. Note however, there is another bug if running in HS mode with an STM32H7. You will need to modify a section in tusb_mcu.h to add #define TUP_RHPORT_HIGHSPEED 1 - in this section:
https://github.com/hathach/tinyusb/blob/fd5bb6e5db8e8e997d66775e689cc73f149e7fc1/src/common/tusb_mcu.h#L158-L163
I can create a PR to add #define TUP_RHPORT_HIGHSPEED 1 if needed.
@Iktek Is there any change you or perhaps others @hathatch are/have been working on getting this to work or made any progress since the last post?
Hi @rolandvs , there have been some "experiments" in https://github.com/Iktek/tinyusb/tree/1249-feature-stm32_fsdev_isocronous_support where I enabled ISO without doublebuffering, which did not work out, so: nothing worthy I think. Unfortunately project priorities shifted and other things got more urgent for now (thanks to the chip-crisis).. S...
h7 does not have built-in HS PHY, which is the TUP_RHPORT_HIGHSPEED is about. For board with external PHY, you need to have define CFG_TUD_MAX_SPEED = OPT_MODE_HIGH_SPEED
@hathach my mistake! I see now. I'll give that a try. Thanks!
When are NAK sent?
When are packets ignored?
How are packets processed while the AVAIL bit is cleared?
Each time the device controller receives an IN or an OUT packet from the host, it will read the buffer control DPSRAM. If the available bit (and the full bit 1 for an IN TO HOST transfer, or the full bit 0 for an OUT FROM HOST transfer) is set then the data is transferred. If not a NAK is sent. This is the same for both directions.
I noticed an additional change that needs to be made. It has to do with the software configurable peripheral interrupt of the USB hardware.
The interrupt vector (PERIB_INTB185) needs to know which peripheral triggers it, therefore the following line needs to be added:
ICU.SLIBR185.BYTE = 62; /* set software configurable interrupt vector 185 to USBI0 */
Please add this line to the files "dcd_usba.c" (insert at 632) and "hcd_usba.c" (insert at 554).
Not adding the line mea...
The endpoint-ix vs endpoint-ix separation isn't necessarily needed if the application doesn't have a second endpoint with that particular ID (e.g., if the ISO EP is 3OUT, then there couldn't be a 3IN endpoint).
The driver already has an allocation method for the PMA. It's correct for most cases (where PMA is not also used for CAN).
The minimum changes need:
- Modify allocator to support double-buffering.
- Support longer PMA buffers (for packet lengths up to 512 bytes?), including c...
Many thanks for the info!
So unless there is a real data error (checksum error), packets are never ignored, right?
I would have no further ideas why the USB stack on RPI4 produces this problem.
At some point, I may get an USB analyzer to debug this further.
TinyUSB is having great api for RNDIS. i used it with Raspberry PICO RP2040 earlier.
i wish i could find support for Arduino DUE SAM3X8E he will be great addidion as Arduino USB is limited to USB HID only.
And adding External Ethernet MAC (like W5500 for referance) to Arduino DUE SAM3X8E is bit complicated because of certain library conflicts.
An simple TinySB port which will help to bring RNDIS feature to Arduino DUE SAM3X8E will be great for community.
Cheers!
sdrshnptl
unfortunately, I am short on time and won't be able to work on this anytime soon. Hopefully someone would make an PR for this.
Operating System
Linux
Board
Raspberry Pi Pico
Firmware
https://github.com/czietz/pico-usb-speed-check built with current TinyUSB (commit fd5bb6e5d).
What happened ?
I wanted to test my USB speed checker (see above) with the current TinyUSB instead of the version 0.12.0 provided in the Pico SDK. It did not work because an incorrect endpoint size was determined here:
https://github.com/czietz/pico-usb-speed-check/blob/0524ce5e430261d9852ee842e3d5cf67ca310512/usb_descrip...
Operating System
Windows 10
Board
STM32L053 nucleo
Firmware
fd5bb6e5db8e8e997d66775e689cc73f149e7fc1
What happened ?
stm32_fsdev dcd_pma_alloc causes an off-by-one error when the max packet length is not an even multiple of PMA blocks (2 bytes or 32 bytes), causing one word to be allocated for multiple endpoints.
How to reproduce ?
Define an interrupt endpoint with an odd number of bytes, along with a second endpoint which is opened after the first.
Debug L...
Thanks for all your comments. I'll see if I can make an effort, but unfortunately it will have to wait as I'm currently working on some issues with higher priority.
Thanks for all your comments. I'll see if I can make an effort, but unfortunately it will have to wait as I'm currently working on some issues with higher priority.
I started looking at the driver, too, and have found at least one bug (#1583), and got confused about error handling while trying to fix it (#1584 ). I'm reworking the code with a goal of handling double-buffering and searching for race conditions. I'll submit it as a PR once I have it working better than the current code. It...
Operating System
Linux
Board
stm32L4x2
Firmware
Compilation to a stm32l4x2.
What happened ?
I tried to compile stm32fs_dev driver for stm32l4x2, I configured CFG_TUSB_MCU to OPT_MCU_STM32L4 as needed, but the linkage step failed.
When diving into stm32fs_dev, it seems like the stm32l4x2/stm32l4x3 are missing there, although it says in the description they are supported.
How to reproduce ?
- add
#define STM32L432xx - run the
cdc_mscexample while doing the...
The endpoint-ix vs endpoint-ix separation isn't necessarily needed if the application doesn't have a second endpoint with that particular ID (e.g., if the ISO EP is 3OUT, then there couldn't be a 3IN endpoint).
Hi pigrew: Unfortunately the UAC2-Specification (Audio-Streaming) is expecting exactly that. An explicit sync endpoint needs necessarily have the same endpoint-ix as its corresponding stream endpoint.
I wonder if there are also other classes which expect this to be possible.
So...
[hathach/tinyusb] New branch created: fix\-TUD\_OPT\_HIGH\_SPEED
Describe the PR
fix #1582, incorrect check for TUD_OPT_HIGH_SPEED
thank you for raising the issue, it is indeed my bad. Will be fixed by #1586 once ci passed.
You likely got the error in dcd_stm32_fsdev_pvt_st.h stating:
#error You are using an untested or unimplemented STM32 variant. Please update the driver.
Please edit the header file and test. the contents should be something like:
#elif CFG_TUSB_MCU == OPT_MCU_STM32L4
#include "stm32l4xx.h"
#define PMA_LENGTH (1024u)
Also, add the L4 to the check in dcd_stm32_fsdev.c:
#if CFG_TUD_ENABLED && \
( TU_CHECK_MCU(OPT_MCU_STM32F0, OPT_MCU_STM32F3...consider using uint32_t and declaring the variable at the time of attribution
This adds the ST STM32L052 since I encountered a target with said MCU and didn't find an existing board type in TinyUSB.
I tried to follow the newer TinyUSB convention of "boards" sub-directory for a given "family" (stm32l0). There is an existing "stm32l0538disco" board using the older convention that I left untouched since I don't know the reasons behind it still being in the main bsp directory.
I set the board name to "stm32l052dap52". The reason for the naming suffix is that the ta...
@perigoso I totally agree with you. I prefer the stdint types over the underlying types, too. But in this specific file, the underlying types were used. Hence I tried to stay consistent with the existing code style.
Declaring a variable anywhere else than at the start of a scope can lead to problems when using older C standards such as C89 (I think). I just wanted to avoid that.
Thanks for your proposals though!
Since the build seems to have failed it looks like I'm going to have to make an ...
Operating System
Windows 11
Board
lpcxpresso55s36
Firmware
We created a project that uses tinyusb as a submodule. It´s architecture is based on the example device/hid_generic_inout but uses freertos.
What happened ?
We perceived the tinyusb library does not detect when the lpc55s36 is unmounted or it does but several minutes or hours later. There are no problems with communication and plugging detection.
We detected the functions involved for this event (in order) we...
I've started working on rewriting the fsdev driver, to add the layer of indirection between endpoint addresses and hardware endpoints, plus double-buffering... and finding tons of bugs.
Some bugs include:
- Having different EP types with the same address was broken
- Receiving odd numbers of bytes potentially causes memory overruns
- Driver was broken if one attempts to open a control EP with address != 0 (changing to just error out if attempted)
- Add check for CMSIS >=5.1
- Broken w...
Describe the PR
dfu_moded_open() only works correct when its called on DFU interface
descriptor. It means that DFU is the only one interface in configuration
or driver is called after all others interface drivers were tried and
gave up.
If other interface is supported and but driver for DFU is called first
(this is the case for BTH and RNDIS).
Code after while loop (that was not entered) has an TU_ASSERT that will
make set_configuration to fail.
Now TU_VERIFY is called first ...
Discussed in https://github.com/hathach/tinyusb/discussions/1600
Originally posted by emonjak August 9, 2022
Hi all,
we use tinyusb on STM32H743. USB is configured to high speed, but runs in full speed mode because of USB 1.1 hub. It looks like the max. packet size for CDC transmitt is still 512 bytes. Therefore, the sending of the strings with the 64 characters length is not completed with ZLP. Call
tud_cdc_write(NULL, 0);
tud_cdc_write_flush();
has no effect.
Sending...
thank you for PR, this is indeed an odd target with dap mcu instead of main mcu. Though I am sure other will find this useful as well, we did have stlink v3 as target as well.
Don't worry about stm32l0538disco, it is added before the family thing, and still haven't got migrated yet. I will do it later on.
ci with rp2040 failed seem to be caused by changes in pico-sdk and have nothing with this PR. will merge and check/fix later as separate PR if needed
I just wanted to confirm that this patch fixes all the USB issues we've been seeing when stress-testing USB on nRF5340.
It would be really great if this fix is merged into upstream repo.
Could this bug cause data written out of usb to be read in? That's been a longstanding issue in CircuitPython on the nRF52840.
@hathach , I see this is using the C11 atomics. I was thinking about using them in the STM32 driver, too, but was not sure if TinyUSB can require that new of a compiler?
I made a really short cable, 5 cm, and I did not have much luck, always showing different symptoms though
@hathach how is your time? would you be able to take a look at this and try your dev board?
Could this bug cause data written out of usb to be read in? That's been a longstanding issue in CircuitPython on the nRF52840.
One of the issue this fixes is that DMA is reported as finished while number of bytes received is less than what was requested (including 0) in that case if same buffer was used for write and read it could manifest like echo I guess. I think that at one point I also had an impression about mismatch between what was send in both directions but it turned out that b...
TinyUSB already requires gcc C11 to get rid of warnings about unnamed structs/unions when [-Wpedantic] is used (ISO C99 doesn't support unnamed structs/unions).
Why not use other features of C11?
Describe the PR
I have a USB Hub that generates a HUB_FEATURE_HUB_LOCAL_POWER_CHANGE interrupts. This is not currently handed in TinyUSB so this hub just didnt work.
This PR handles hub device changes and clears the respective feature (currently we only handle hub port changes).
I also have another hub that generates HUB_FEATURE_PORT_ENABLE_CHANGE, which was never cleared so I was just spammed with hub interrupts. This PR also clears other HUB port interrupts to prevent this happ...
Brilliant !!! Thank you very much for the fix and great explanation. I am sorry for the super late response, I was too off schedule lately, and still catching-up with PRs/Issues.
The fix is spot-on, I have tried the blehci via usb, before this PR it will crash randomly, but got stable now. I remembered trying to use atomic bool previously, but got into a worse racing condition, probably due to missing the 2nd case where SIZE.EPOUT cannot be read after DMA started. Thanks again.
Could this bug cause data written out of usb to be read in? That's been a longstanding issue in CircuitPython on the nRF52840.
Yeah, I think this will possibly fix the hiccup issue with nrf cdc fast transferring.
@hathach , I see this is using the C11 atomics. I was thinking about using them in the STM32 driver, too, but was not sure if TinyUSB can require that new of a compiler?
I actually really like c11, we already in 22' already. C11 is much better and safer than C99, one of...
superseded by #1489 . Thank you very much for the PR.
thank you for the issue and the fix.
superb ! thank you for the PR. Indeed, my hub does not generate these events. Though would you mind adding the brackets for the if-else.
Note: CI failed is due to an recent changes of pico-sdk (unrelated to this PR). I will try to fix that soon enough.
can you add bracket { } to if-else, it is minor, but I try to avoid if-else on newline without brackets.
Operating System
Windows 11
Board
Teensy4.1 (EHCI)
Firmware
When unplugging a device on my Teensy4 board running the host EHCI backend I reliably hit this assert, particularing when using a USB Hub:
I believe this is due to a race condition during device removal. Consider the following sequence:
- Device is unplugged - TinyUSB registers a detach event in IRQ. 👍
2....
right ofcourse, Ill fix this soon
Describe the PR
This PR adds MIDI host support for RP2040 boards based on work done by @rppicomidi in https://github.com/hathach/tinyusb/pull/1219 and @Skyler84 in https://github.com/hathach/tinyusb/pull/1434. I rebased all changed on top of master and fixed some compilation errors.
MIDI controller (behringer x-touch mini) enumerates and the data is received.
Creating this pull request as a draft for comments. I'm very new at this and I'm kind of surprised that it works :D
there seems to be no tag yet for this release, when it is tagged would you also update repository.yml ?:)
thank for reminder, sure thing, still waiting for https://github.com/raspberrypi/pico-sdk/pull/981 to make sure ci work before making the release + tag.
[hathach/tinyusb] New branch created: release\-0\.14\.0\-p2
Describe the PR
Update repository.yml for 0.14.0
[hathach/tinyusb] New tag created: 0\.14\.0
I have release 0.14.0 with updated repository.yml. Will run ci later, since pr to pico-sdk may take a while
[hathach/tinyusb] New branch created: fix\-release\-body
Describe the PR
try to fix release body (multiple line string in curl parameter) in tinyusb_src (not tested)
[hathach/tinyusb] Issue opened: #1612 "multiple definition of \`dcd\_\.\.\." if cmpiling for STM32F2
Operating System
Linux
Board
Custom
Firmware
`/*
- tusb_config.h
- Created on: Aug 23, 2022
-
Author: DaGo1120
*/
#ifndef TUSB_CONFIG_H_
#define TUSB_CONFIG_H_
#ifdef __cplusplus
extern "C" {
#endif
//--------------------------------------------------------------------+
// Board Specific Configuration
//--------------------------------------------------------------------+
// RHPort number used for device can be defined by board.mk, default ...
mentioned in #1591, remove or filter the old driver portable/st/synopsys/dcd_synopsys.c. It will be removed from repo in the future soon.
This is the workaround I have been working with so far. Thanks for clarification!
Removing the Hardcoded interface numbers from the video descriptors allow the user to add other interfaces before or after the Video Control Interface and Video Streaming Interface
Describe the PR
Field started (regarding transfer) was only cleared when transfer
was finished.
For audio devices set interface is called many times.
When there is no audio (silence) set interface requests zero
length bandwidth that in turn calls dcd_edpt_close().
When endpoint is closed due to set interface request transfer
should not longer be started since it will block next start transfer
with assert.
This just sets 'started' to false when endpoint is closed.
**Additio...
Hi @pigrew ,
thank you for taking the job pushing this further.
Is there anything I could do for you? (testing / take over detail implementations)
Or is there anything where you document your "missing bits" so I could do some groundwork?
Regards Pascal
great, thank for the fix.
great, thank for the fix.
It was me who introduced this bug in the first place.
Thanks for quick review.
great, thank for the fix.
It was me who introduced this bug in the first place. Thanks for quick review.
haha, not really, the bug is just an side-effect introduced along with a much more complicated race condition :D
Any news regarding this? Is the hub support critical for merging, or is there something else that needs to be done before approval?
The pin state can be checked with pySerial
Something along these lines
import serial
tty = serial.Serial(port = '/dev/AMA0', baudrate = baud, parity = serial.PARITY_NONE, stopbits = serial.STOPBITS_ONE, bytesize = serial.EIGHTBITS, xonxoff = True, timeout = 2.0)
if (tty.getCTS()):
print("CTS")
You can also use coolterm under Linux for a checking the state of the cts/dsr pins with a nice GUI.
Hi!
I'm very excited for this functionality. But I'm getting compile errors when I try this out. The process I'm using:
git clone https://github.com/atoktoto/tinyusb tinyusb-atoktoto
cd tinyusb-atoktoto
git checkout midihost-atoktoto
git submodule update --init lib
cd examples/host/midi
make BOARD=raspberry_pi_pico get-deps
make BOARD=raspberry_pi_pico all
And I get the error:
[...]/tinyusb-atoktoto/examples/host/midi/src/midi_app.c:195:16: error: unused variable '...Not sure if that's the source of the problem but the way I have it set up is the same as described by the original author of this merge request: https://github.com/rppicomidi/midi2usbhost ( "Using the forked tinyusb library" )
Operating System
MacOS
Board
Raspberry Pi Pico RP2040
Firmware
tinyusb/examples/device/cdc_msc
using pico-sdk 1.4.0 in $PICO_SDK_PATH
What happened ?
Cannot compile with LOG=1 or LOG=2, instead get error:
[ 23%] Building C object CMakeFiles/cdc_msc.dir/src/main.c.obj
: error: "CFG_TUSB_DEBUG" redefined [-Werror]
How to reproduce ?
git clone https://github.com/raspberrypi/pico-sdk
git clone https://github.com/hathach/tinyusb/
export PI...@zj2004 could you please check if #1451 fixes problem you described?
yes ,it fixes.
the problem appear at LOG=2
as you say “For PIC32 OUT packets that were sent from host and not handled fast enough could lead to memory corruption.”
Operating System
Windows 7
Board
Various
Firmware
Device CDC
What happened ?
I've tried 5 different ways to use TinyUSB to produce a CDC device and these are my varied results:
- ESP32-S2 (DWC2) - fails on a stress test (described in the ESP32 github) with a random IN packet (tx from device) not signalling an int. which halts that part of the stack.
- Pi Pico native USB (unknown) - works perfectly, stress test as described passes.
- Raspberry Pi Zero W (DWC2) - wo...
Here is a stripped down example project created from the example: https://github.com/atoktoto/pico-midi-host
Operating System
Linux
Board
rp2040
Firmware
In
tinyusb-master/examples/device/audio_test/main.c
the body of the function audio_task() is left empty. I have tried to modify it so that it returns a constant value at 16Mhz with 2 bytes per sample. I believe I have modified the tusb_config.h and usb_descriptors.c correctly.
What happened ?
rather than a nice straight line, assigning a constant for each sample (rather than a value from the microphone) produces a saw-to...
There are a number of compile errors for missing definitions when building against the library for an STM32L4 series IC.
It's possible there are other issues that need to be resolved to fully support this family of chips, but this did get us closer to being up and running.
While there are many compilation errors, here is one example:
tinyusb/src/portable/st/stm32_fsdev/dcd_stm32_fsdev_pvt_st.h:119:15: error: unknown type name '__IO'
119 | static inline __IO uint16_t* pcd_...Is there any update on this?
Is there any update on this?
unfortunately there is not. However I'm in contact with Espressif to try to solve this. I will keep you posted
Operating System
Linux
Board
Custom stm32h769 with HS phy
Firmware
examples/device/cdc_msc_freertos with synopsis_dcd2
What happened ?
After booting and plugging in the first time everything works fine. But if I unplug USB cable when there is msc transmissions after plugging again tusb don't work correctly. Transmission stops every time in the same place:
USBD Setup Received A1 FE [00 00 02 00 01 00](tel:00 00 02 00 01 00)
MSC control request
MSC Get Max L...Describe the PR
Initial Microchip PIC32MM/MX & PIC24 support. Based on the KHCI implementation.
Only device mode is supported at this moment.
Additional context
Tested on the Microchip PIC32MM0064GPM028.
[hathach/tinyusb] New comment on issue #1618: My successes and failures with TinyUSB \(DWC2 mostly\)
Bad news, I'm sorry to say... Test number 2 above (Pi Pico native USB) with the loop part of my stress test moved from CPU0 to CPU1 (code moved from loop() to loop1() with a new small delay in start1() for coordination, but no other changes) cannot reliably transfer data either.
It all seemed to work OK at first, and while it was running I reviewed the Arduino code for Pico - seems to have extra mutexes that I don't see elsewhere, so that looked very well done. Then after about 10 minute...
Hello friends
I have such a problem with the keyboard.
I want to connect as a keyboard to a device that only supports USB1.1.
The microcontroller I use is ESP32-S2 with tinyusb. I have changed CFG_TUD_ENDPOINT0_SIZE in tusbconfig to 8, but No connection was made.
@atoktoto In case you are interested, my fork of this project has a new branch pio-midihost that supports the Pico-PIO-USB as a host. I have a demo project pico-usb-midi-filter that passes MIDI data between the built-in USB configured as a device and a new USB Host port created from PIO. I suspect I duplicated some of your work in this pull request in my fork.
@rppicomidi Is the Pico-PIO-USB a way to go over the dedicated hardware? Why?
Related area
device stack
Hardware specification
N/A
Is your feature request related to a problem?
I am trying to implement a custom usb driver for xinput controllers, which I can't really do easily due to there not being a concept of custom app drivers for usb hosts.
Describe the solution you'd like
A solution to this would be copying how app drivers are implemented for usb devices, and just implementing the same logic for usb host.
I have checked existing issues,...
@BennyEvans I can confirm that removing that line from the driver triggers the unmount event.
I am testing on v0.13, and the respective line is 514 instead of 525.
However, I am getting several triggers of this unmount event when I unplug the USB cable. Is it expected?
Also, I would like to try v0.14 to get things up to date, but it seems that there are some configurations that changed and I am stuck on check_dwc2 function.
This is the setup I have for v0.13:
#define CFG_TUS...Operating System
Others
Board
ESP32-S2
Firmware
ESP-IDF 4.4.2
What happened ?
occasionally messages sent are repeated infinitive . sending a new message stops this or get repeated infinitive as well.
How to reproduce ?
required a bigger application making use of stack and heap more exessive
Debug Log as txt file
No response
Screenshots
No response
I have checked existing issues, dicussion and documentation
- [X] I confirm I have checked exist...
@atoktoto I agree #1434 seems to work. I am not arguing against your pull request. Thank you for doing the work. The pico-usb-midi-filter project uses a single Pico board to implement a bi-directional MIDI filter between a MIDI USB host (which I implemented using PIO from the Pico-PIO-USB project) and a MIDI USB device (which I implemented using the Pico's dedicated USB hardware). My comment was only wishing I had looked here before I did ...
This pull request replaces the previous draft: #1605
This PR adds MIDI host support for RP2040 boards based on work done by @rppicomidi here: https://github.com/rppicomidi/tinyusb/tree/pio-midihost and @Skyler84 in #1434.
It seems to work pretty OK and has no issue with hot-plugging (re-plugging) the device that #1605 had.
Operating System
Others
Board
RP2040 / Pico
Firmware
Pico-SDK 1.4.0
What happened ?
I am using TinyUSB as a HOST in a noisy environment and sometimes I need to reset the USB bus. To do this I call "hcd_init(0)" as part of the reset process.
Previously in TinyUSB version 0.13.0, this wasn't an issue and it allowed me to do this without crashing.
After this was added in TinyUSB 0.14.0,
**rp2040: use shared IRQ handlers, so user can also hook the USB IRQ by @...
This pull request is to fix bug #1628. After adding this code I can call hcd_init(0) multiple times without causing a hard_assert on rp2040.
I'm getting error on this line:
error: conversion to 'uint' {aka 'unsigned int'} from 'int' may change the sign of the result [-Werror=sign-conversion]
153 | bit = 1 << (i*2+j);Getting error on this line:
error: 'midih_interface_t' has no member named 'num_string_indices'
245 | p_midi_host->num_string_indices = 0;
About my above comments, since there wasn't an example included in this PR, I took the previous PR's examples/host/midi and tried compiling it.
Looks like adding #define CFG_MIDI_HOST_DEVSTRINGS 1 to tusb_config.h fixes this error.
error: conversion to 'int8_t' {aka 'signed char'} from 'uint8_t' {aka 'const unsigned char'} may change the sign of the result [-Werror=sign-conversion]
315 | p_midi_host->in_jack_info[p_midi_host->next_in_jack].jack_type = p_mdij->bJackType;
| ^~~~~~
[hathach/tinyusb] New comment on issue #1618: My successes and failures with TinyUSB \(DWC2 mostly\)
thanks for detailing your usage with tinyusb. Though this is more like a discussion than a bug report which needs step & firmware to reproduce. Note: if you are using it with other platform than bare metal C such as arduino (esp32/pio), there may be issue with platform integration code (e.g mutex between cores) and may not entirely be the bug of the stack.
superb! thank you very much for the ports. Currently, I don't have any pic32mm board to test this out, but can you add the bsp for pic32mm board so that it can be easily tested for other users. If that is too much work, we can merge this as it is and do that later on.
Note: since pic32mm and nxp khci use the same chipidea fs usb, we can merge them into general drivers later on in the future. (just a head up).
please remove the Note line, also use the OPT_MCU_STM32L4 macro instead of number 309. Since L4 has two series with different usb controller. You may want to make sure it is L4x2 or L4x3. (L4x5,x6 use dwc2).
thanks for the PR, please follow the review
indeed, the rp2040 cmake try to redefine this in two places, please manually comment out one in this line https://github.com/hathach/tinyusb/blob/master/hw/bsp/rp2040/family.cmake#L58 . I will make an PR to remove this later on.
No idea why jack_type was signed... changed it to uint8_t.
I will add a simple example in the next few days if time permits.
Thanks! I found that too, but I don't yet understand cmake enough to understand if making that change messed other things up, else I would make the PR too.
I don't understand cmake as well, we can make an PR then mention rpi team to help. At worst, I guess we can temporarily comment out that line :)
@mauriciocirelli I don't have the board with me at the moment so can't help. But will try to get to it over the next few days.
Still having problems compiling this.
Since there was no Makefile in the PR example, I added the default minimal one:
include ../../../tools/top.mk
include ../../make.mk
INC += \
src \
$(TOP)/hw \
# Example source
EXAMPLE_SOURCE += $(wildcard src/*.c)
SRC_C += $(addprefix $(CURRENT_PATH)/, $(EXAMPLE_SOURCE))
include ../../rules.mk
And then I could follow the standard tinyusb build steps but wi...
Thanks for being persistent on this one. I'm new at this and was not even aware of the standard way to build TinyUSB.
I'm building this starting from pico-examples CMakeLists.txt as the project includes both pico-sdk and TinyUSB examples.
Do you have a specific recommended build process for this PR?
I have tried both using standard Pico build process inside of midi_rx and moving midi_rx to pico-examples and building there. Specifically I have tried:
cd tinyusb-testmidihost/examples/host/midi_rx
mkdir build
cd build
cmake ..
And I have tried:
cd pico_examples
cp -a ../tinyusb-testmidihost/examples/host/midi_rx .
echo "add_subdirectory(midi_rx)" >> CMakeLists.txt
mkdir build
cd build
c...Generally I'm following this guide: https://datasheets.raspberrypi.com/pico/getting-started-with-pico.pdf and building from CLion IDE, but the commands it's running are:
cmake.exe -G Ninja -S E:\pico\pico-examples -B E:\pico\pico-examples\build
cmake.exe --build E:\pico\pico-examples\build --target tinyusb_host_midi_rx -j 9
(I ommited the env variables specifying the paths to compilers for the second command)
For any other example it would be as simple as:
cd pico-examples
`...
Seems odd to me you're not following standard tinyusb build process for this.
In the meantime (while waiting for #1434 to be merged) I started on adding a nice-looking MIDI API. Turns out the simplest way is to reuse https://github.com/FortySevenEffects/arduino_midi_library. Fortunately it does not depend on Arduino itself and has a transport plug-in architecture. So I wrote a TinyUSB based plugin for it: https://github.com/atoktoto/pico-midi-usb-transport
Seems odd to me you're not following standard
tinyusbbuild process for this.
I will try to fix this
@todbot On my machine (Windows, under WSL2) the example now builds with make BOARD=raspberry_pi_pico all in the example directory and works as intended when uf2 is dropped onto RP2040. I did not get the no macro name given in #define directive error at any point so not sure where to look for the issue.
Operating System
Linux
Board
Custom board
Firmware
FW with custom RTOS. Not relevant for this issue.
What happened ?
OOB access to _dwc2_controller array.
Note about STM32H73x having only one port is right.
// NOTE: H7 with only 1 USB port: H72x / H73x / H7Ax / H7Bx
// USB_OTG_FS_PERIPH_BASE and OTG_FS_IRQn not defined
Thus...
This is already modified in v 14:
`#elif CFG_TUSB_MCU == OPT_MCU_STM32H7
#include "stm32h7xx.h"
#define EP_MAX_FS 9
#define EP_FIFO_SIZE_FS 4096
#define EP_MAX_HS 9
#define EP_FIFO_SIZE_HS 4096
#if (! defined USB2_OTG_FS)
// H7 with only 1 USB port: H72x / H73x / H7Ax / H7Bx
// USB_OTG_FS_PERIPH_BASE and OTG_FS_IRQn not defined in CMSIS files
#define USB_OTG_FS_PERIPH_BASE USB1_OTG_HS_PERIPH_BASE
#define OTG_FS_IRQn OTG_HS_IRQn
...
@atoktoto, I also can get it to compile now (with similar Makefile and changes as your commits, though I had to also fix casts on int -> uint conversion errors cable_num in midi_host.c). Not sure what that no macro name error was but I nuked the directory, recloned and re-pulled and that error is gone.
The pico-midi-usb-transport library is great! The 47effects MIDI library is wonderful.
The CMake files of `pico-midi-usb-...
That's a naming inconsistency on my side.
The key fact here is the name of the project is not important. AFAIK add_library(pico-midi-usb INTERFACE) adds a target that can be linked to with target_link_libraries(example-print-notes pico-midi-usb).
Dear @BennyEvans,
The issue is worse than at first... It is calling the tud_umount_cb callback so many times that it is giving me a STACK OVERFLOW error at the TinyUSB task.
I had to work around it by setting a flag like this:
void tud_mount_cb(void)
{
if(bIsMounted)
return;
// Do something here
bIsMounted = true;
}
// Invoked when device is unmounted
void tud_umount_cb(void)
{
if(!bIsMounted)
return;
bIsMounted = false;
// Do something h...I'm aiming to get TinyUSB to build with the IAR Embedded Workbench toolchain (I'm testing against Arm version 9.20.4) and specifically, I'm trying to build it as part of the Raspberry Pi Pico SDK. In doing so, I've identified a number of issues. Some of these are in rp2040-specific source files, but many others are in platform-neutral ones.
I've grouped the changes into a series of commits based upon the diagnostic generated by IAR. The first four are errors, and prevent the build from pro...
Related area
UVC
Hardware specification
rp2040
Is your feature request related to a problem?
If the PresentationTime or SourceClockReference bit is set in tusb_video_payload_header_t, currently there seems no way to set those extended fields as described in UVC 1.5 spec, table 2-6.
But what I want to do is add user defined data append after the payload.
Describe the solution you'd like
- Add a user defined macro for custom data length, use to initialize header ...
[hathach/tinyusb] New branch created: fix\-1634
I have done some refactor, and probably mess up when merging/rebasing, will be fixed by #1641 . Thanks for the issue.
Describe the PR
ISO packet size is up to 1023 for full speed device. Upon completion of ISO reception, reported length of incoming packet was truncated to one byte only.
This results in incorrect data stream for higher bit rates 48 samples * 4 bytes per sample * 2 channels = 384 bytes of data and 128 was reported.
There is no change in logic extending xact_len to uint16_t fixes the issue.
thanks, PR looks good, will merge after ci passed.
Do you have any simplest code and "exact" steps to reproduce the issue.
Thanks for the issue, unplug/suspend indeed isn't fully working with all STM32 mcus. Some requires an configure to OTG A/B register setting. Look like it is the case here, unplug is mistaken as suspend and device isn't reset/re-init state/endpoint as it should be. I think the old driver at st/synopsys does handle this better, maybe you could give it a try. I will revise this later on when having time.
superb!! thank you for the fix. Sorry for these type of issue, it should be avoidable. I could imagine you having hard time to troubleshoot this.
superb!! thank you for the fix. Sorry for these type of issue, it should be avoidable. I could imagine you having hard time to troubleshoot this.
Thank you for quick response. No need to be sorry, ISO support was added late.
16 bit PCM was good enough so far but I tried to use AUDIO_DATA_FORMAT_TYPE_I_IEEE_FLOAT and that change subslot size to 4 hence error.
Nop, it happens occasionally in the ESP-IDF implementation and when it happens is a backtrace impossible due to muktitasking. It must be that tinyUSB keeps thinking that the transmit buffer is not sent and sends it again. I was hoping that here somebody knows tinyUSB to point me to the source where (as CDC device) the data buffer is handled. I think that a byte buffer goes out of bound and overwrites e.g. the flag marking the buffer as sent.
I will move this to discussion, since there is no way to fix a bug without an way to reproduce it reliably. Also IDF also add its own integration/management code on top of tinyusb, you may need to also look at those as well. cdc_device.c is available at src/class/cdc you could check that out.
The modification makes caller require cast operations. Does it need for IAR?
I think it is better to avoid cast operations at the caller. Cast operations sometimes occur unexpected bugs, it is better to gather cast operations in a low-level function than scatter at caller functions.
It was just the case that there was a lot of pointer arithmetic on void pointers, and it was easiest to simply replace all of them in that source file with uint8_t const *. I have gone through and reverted them to void const * where that reduces the overall number of casts involved. Overall, the commit now results in a net reduction in the number of casts, which is nice.
thanks for the fix and the extra info :)
Discussed in https://github.com/hathach/tinyusb/discussions/1636
Originally posted by jeroentaverne September 12, 2022
Hardware: Raspberry Pi Pico acting as USB host
Software: TinyUSB example cdc_msc_hid
Log: see attached file
This keyboard somehow shows up as a keyboard and mouse, but doesn't have any mouse/touchpad/trackball capabilities. Keyboard protocol shows up as instance 0, mouse protocol as instance 1, but HID_ITF_PROTOCOL_NONE isn't reported by this keyboard. Af...
This is the code I added. It will make the keystrokes work, but the "mouse" instance is not reported anymore. I will send you a logfile as well.
printf("HID Interface Protocol = %s\r\n", protocol_str[itf_protocol]);
- if (itf_protocol == HID_ITF_PROTOCOL_KEYBOARD )
- {
- static uint8_t value = 0;
- printf("Executing tuh_hid_set_report\n");
- tuh_hid_set_report(dev_addr, instance, 0, HID_REPORT_TYPE_OUTPUT, (void*)&value, 1);
- }
// By default host stack will use act...
Thanks for your PR, most changes are good for me, especially explicit enum type conversion.
I don't use RP2040 so I can't test these changes. I feel like most IAR users use traditional MCUs
@pigrew Could you take a look at changes in USBTMC class ?
I found your patch because my attempts to implement a host for device with a bulk in endpoint and a bulk out endpoint failed. With the patch it actually works, although I've stayed away from complicated setups with hubs.
However, I now have the issue that it's very slow as every new transfer has to wait for the start-of-frame marker because that's the only time where hardware actually polls the endpoint control “register” in DPRAM. If I understand the RP2040 datasheet correctly, the contro...
Setting bcdUSB to 0x0210 also causes enumeration to fail on RP2040 it seems.
I did a proof of concept in https://github.com/wrtlprnft/tinyusb/commit/43a245db80b0f293ab9d3fcb55503e6309feb072.
I don't think it's ready to be a pull request of its own because it requires the user to only have one transfer (tuh_edpt_xfer or tuh_control_xfer) in flight at a time and there are likely many things I didn't think about. Maybe it's useful to someone until there's a better solution.
After study UVC spec, it seems user defined data is not allowed in payload header, hence I will try to add function for PTS and SCR setting.
Describe the PR
Fixes the following compiler error when compiling an audio device with feedback enabled (no rtos, st/synopsys port).
lib/tinyusb/src/class/audio/audio_device.c:2051:13: error: conflicting types for 'set_fb_params_freq'; have '_Bool(audiod_function_t *, uint32_t, uint32_t)' {aka '_Bool(audiod_function_t *, long unsigned int, long unsigned int)'}
2051 | static bool set_fb_params_freq(audiod_function_t* audio, uint32_t sample_freq, uint32_t mclk_freq)
| ...Describe the PR
This PR attempts to fix the vendor device class.
However, be warned. this isn't tested beyond compiling it yet, and I don't really know how USB or this library work, so it could be that I completely broken it. DO NOT MERGE THIS BEFORE SOMEONE COMPETENT REVIEWS IT
Additional context
Should solve #1097 if it works.
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
Hey @hathach any progress on this?
I know you're busy so willing to help sponsor this feature if needed.
Let me know how I can help you!
I did a proof of concept in wrtlprnft@43a245d.
I don't think it's ready to be a pull request of its own because it requires the user to only have one transfer (
tuh_edpt_xferortuh_control_xfer) in flight at a time and there are likely many things I didn't think about. Maybe it's useful to someone until there's a better solution.
@wrtlprnft Thanks! This is also the first attempt I have seen...
@wrtlprnft Have you seen the discussion #1261? (TL;DR If a bulk IN transfer does not complete (because the device NAKs the transfer), epx is busy until the device sends some data back) I took an admittedly quick look at the PR and did not see such a mechanism. My attempt a while ago in PR #1219 does address receiving NAK on bulk IN, but it is a bit ugly.
@rppicomidi I did not see that, but I was wondering about that myself. Thanks for the pointer!
My intended application, which I was doing a quick prototype for to see whether it was feasible and fast enough, was doing JTAG over an FTDI dongle. In that application, I have a clear command/response structure where I know more or less exactly how many Bytes of IN transfer I'll get at what point, so the issue never really arose.
As I said before, my code currently doesn't even attempt to sup...
Operating System
Linux
Board
STM32F723
Firmware
Use/examples/device/video_capture
What happened ?
Use/examples/device/video_capture
#define CFG_TUD_VIDEO_STREAMING_EP_BUFSIZE has a value greater than 1880
The image cannot be transferred
I just want the transmission speed to be faster
Because transferring Yuy2 format is very slow
Or should it be solved from somewhere else?
How to reproduce ?
#define CFG_TUD_VIDEO_STREAMING_EP_BUFSIZE has a value greater than ...
This is not a bug. Please find the https://github.com/hathach/tinyusb/pull/1118#issuecomment-1008635903
Current UVC implementation supports only Full Speed. So, CFG_TUD_VIDEO_STREAMING_EP_BUFSIZE is acceptable up to 1023 byte.
Operating System
Others
Board
Custom (STM32H7)
Firmware
- st/synopsys port
- no RTOS
- gcc
I don't think any of these are relevant though, it's a compile-time error.
I propose a fix in PR https://github.com/hathach/tinyusb/pull/1646
What happened ?
Compiler error, due to a symbol being used before it is declared:
lib/tinyusb/src/class/audio/audio_device.c:2051:13: error: conflicting types for 'set_fb_params_freq'; have '_Bool(audiod_function_t *, uint...Any updated in this request ?
is there a plan to support xhci in nearest future ?
The implementation of this doesn't seem to exist?
On the device side it's just a static inline with no parameters that calls tud_midi_n_available(0, 0), the parameters being device and cable, and returns number of bytes available to read.
Not really an equivalent in this code. Just remove it, I guess?
@kaspernyhus That's really an interesting problem. Could you please test your setup with Windows host? And with ESP32-S2, if you have one? (just to rule out any multi-CPU issues).
I suggest moving line 41 in tusb.h to
#if CFG_TUH_HID
#include "class/hid/hid_host.h"
#endif
and/or
#if CFG_TUD_HID
#include "class/hid/hid_device.h"
#endif
Not doing so leads to an unnecessary include.
Commit c1c1238:
Static code checks generate unnecessary warnings when using the CCRX toolchain.
This happens if the macro TU_VERIFY_STATIC is used on the same line numbers in different files. The macro only uses the current line number as "unique ID".
The new solution includes the COUNTER macro in the static code check which gets rid of that issue.
This is the macro that expands to something like:
typedef char Line<XY>[(const_expr) ? 1 : 0];
This commit changes the macro to:
typedef char Line<XY><Z>[(const_expr) ? 1 : 0];
With Z being the value of _TU_COUNTER_.
Yes, the number does not contain the exact line number (because _TU_COUNTER_ was appended). But this is not an issue since the compiler error generated in case of a failed verification is the following:
`E0520094: The size of an array must be greater than ze...
Operating System
Linux
Board
Custom board with STM32H730 and USB3343
Firmware
tinyusb 111515a
FW based on custom RTOS
should not be relevant for this case
tusb port config
#define CFG_TUSB_RHPORT1_MODE (OPT_MODE_DEVICE | OPT_MODE_HIGH_SPEED)
What happened ?
After init, there is just one GINTSTS_USBRST event followed by one GINTSTS_USBSUSP event and nothing else happens after that. Tested with HUB and also directly with PC.
This board used t...
Adding VBUS monitoring override and peripheral session override does not have effect.
// Disable VBUS sense
bit::clear(USB_OTG_HS->GCCFG, USB_OTG_GCCFG_VBDEN);
// B-peripheral session valid override enable
bit::set(USB_OTG_HS->GOTGCTL, USB_OTG_GOTGCTL_BVALOEN | USB_OTG_GOTGCTL_BVALOVAL);
Operating System
Others
Board
doesn't matter
Firmware
Patch: https://paste.debian.net/1255382/
What happened ?
The bitorder in the usb488 subclass capabilities is wrong. I tried to attach a Patch, but its format gets corrupted, even if i use the "code" formatter. So i pasted it to paste.debian.net, see above.
How to reproduce ?
.
Debug Log as txt file
No response
Screenshots
No response
I have checked existing issues, dicussion and documentat...
I had to edit the report with an updated link to paste.debian.net (just in case you missed the patch). The new pate expires after 90 days.
When using osal_queue_send to send events to the queue _usbd_q in udbd.c's dcd_event_handler, the queue may overflow (particularly if the application calls usbd_defer_func too often). In that case, events will be missed, leading to spurious and hard-to-debug errors (for example, IN data is sent, ISR is called, but nothing else happens).
Therefore I'd like to suggest adding TU_ASSERT around the calls to osal_queue_send in order to make finding these bugs easier.
Operating System
Others
Board
Raspberry Pi Pico
Firmware
Custom firmware based on examples.
What happened ?
I have a specific keyboard which fails to mount and always reports 'Control STALLED' followed by process_set_config 428: ASSERT FAILED.
Other keyboards I have access to appear to work as expected.
How to reproduce ?
Plug in keyboard.
Debug Log as txt file
HID Set Protocol = 0
[0:1] Set Interface: 21 0B 00 00 00 00 00 00
hw_endpoint_init dev 1 ep ...
@hathach, I've been working on this as I use cmake for all my projects.
I've got it working, including support for generating tusb_config.h
There are issues with the RNDIS support because of the dependency on lwip and lib/networking that I could use feedback for.
I also have not integrated into the existing cmake example projects yet; that would be a future change dependent on this.
Are you interested in reviewing a WIP pull request for this?
The test code is a bit complicated for PIC devices. Basically there are 2 factions when it comes to PIC development - some people would just use everything supplied by Microchip (including their huge IDE & build system), and other people (like me) use as many free software components as possible. Currently the test firmware project of the both PIC32MM and PIC24 uses CMake and contains some out-of-tree BSP files, and it would be unwise to include all of them in the TinyUSB code tree (or you th...
Could be related to when the PMA is configured, around https://github.com/hathach/tinyusb/blob/111515a29cce668ea435904a397a1f0117114122/src/portable/st/stm32_fsdev/dcd_stm32_fsdev_pvt_st.h#L200
A while ago I had fixed a similar issue in libopencm3 :
https://github.com/libopencm3/libopencm3/commit/01f33f47b720e3222dc8560a3f000745d5fa5006
The code should probably be looked at closer, since there's place for subtle bugs in the calculations.
The bitorder in the usb488 subclass capabilities is wrong. I tried to attach a Patch, but its format gets corrupted, even if i use the "code" formatter.
Seems to work fine here :
From ec1a30ded4f6c5580f99a6daa43d341f352920a0 Mon Sep 17 00:00:00 2001
From: Daniel Gorsulowski
Date: Thu, 29 Sep 2022 10:24:48 +0200
Subject: [PATCH] fixed usb488 subclass capabilities bitorder
See Test & Measurement Class Specification
https://www.usb.org/document-library/test-measurement-cla...Describe the PR
Add support for MJPG on UVC.
It is tested with video_capture example on frdm_kl25z and raspberry pi pico
Additional context
video_capture uses MJPG video instead of uncompressed video when it builds with CFG_EXAMPLE_VIDEO_READONLY defined.
If a MCU has not enough SRAM for frame buffers, CFG_EXAMPLE_VIDEO_READONLY is already defined in board.mk at hw/bsp/. For example, frdm_kl25z and so on. Any other MUC which has enough SRAM for frame buff...
@me-no-dev
Would you see if this PR is useful or not for your application which indicated https://github.com/hathach/tinyusb/pull/1118#issuecomment-939278418 ?
Operating System
Others
Board
Pico Pi
Firmware
None - compiling on WSL in Windows.
What happened ?
I'm trying to build host_hid_to_device_cdc in my own directory.
I get an error saying can't find pio_usb.h - which seems fair because I can't find it.
It is referred to in /hw/bsp/rp2040/family.c:
#if CFG_TUH_RPI_PIO_USB || CFG_TUD_RPI_PIO_USB
#include "pio_usb.h"
#endif
But if I cd /root/pico/pico-sdk and ls -R | grep "pio_usb.h" I get n...
Ok I found this site which took me a step closer:
https://github.com/bgni/minimal-pico-tinyusb-pio-project
I need to
cd ~/pico/pico-sdk/lib/tinyusb
git -C tinyusb submodule update --init hw/mcu/raspberry_pi/Pico-PIO-USB
Then the file now exists - not really sure why it wasn't 'somewhere' before, but this bit of magic made it appear.
Now the 'can't find' error moved to hcd_pio_usb.c so perhaps it is now just because I need to set a directory in the cmake stuff........
Discussed in https://github.com/hathach/tinyusb/discussions/1631
Originally posted by morio September 10, 2022
Is it possible to use TinyUsb to control two physical USB host ports?
Specifically on the RP2040 I'd like to use the builtin USB as host and the Pico PIO USB also as a host port at the same time.
This would be to allow a USB keyboard in one port and a USB mouse in the other.
I've seen the host_hid_to_device example in the Pico PIO USB project (https://github.com...
Operating System
Others
Board
STM32F429
Firmware
BOARD_DEVICE_RHPORT_NUM 0
BOARD_DEVICE_RHPORT_SPEED OPT_MODE_FULL_SPEED
CFG_TUSB_MCU OPT_MCU_STM32F4
CFG_TUSB_OS OPT_OS_NONE
CFG_TUSB_RHPORT0_MODE (OPT_MODE_DEVICE | OPT_MODE_FULL_SPEED)
CFG_TUSB_RHPORT1_MODE OPT_MODE_NONE
CFG_TUSB_RHPORT_MODE (OPT_MODE_DEVICE | OPT_MODE_FULL_SPEED)
What happened ?
Vendor-specific class (device mode):
In the device, when the size of the data to transmit is multip...
ah right, the struct layout is incorrectly inverted. It would be great if you could make an PR, otherwise, please wait a bit, I will do it myself.
I will also appreciate that TinyUSB can work with 2 physicals devices ports to permit to link 2 usb systems.
can you provide details on the keyboard in question
- specific name, model, product link
- descriptor of keyboard including configuration descriptor and hid report descriptor
- For log, please attached full txt file when LOG=2
thank you very much for the explanation. I understand that providing out-of-box example is a bit complicated, especially as you said, most people would stick with microchip IDE. We will merge this as working piece of code and will look at the running example later on when having time. Thanks again
Describe the PR
Added support for isochronous endpoints as well as stopped the USB from accidentally writing the incorrect address upon endpoint resets for dcd_lpc_ip3511
Additional context
Tested on an LPC55S69JBD100 using the [LPC55S69-EVK](https://www.nxp.com/design/development-boar...
may want to rename TUD_VIDEO_CAPTURE_DESCRIPTOR to TUD_VIDEO_CAPTURE_DESCRIPTOR_UNCOMPR for consistency
line 470, 485, 494, 495 should all have the pointer type changed for consistency as well as functionality (in some cases)
tusb_desc_cs_video_frm_uncompressed_t --> tusb_desc_cs_video_frm_t
tusb_desc_cs_video_fmt_uncompressed_t --> tusb_desc_cs_video_fmt_t
may want to rename TUD_VIDEO_CAPTURE_DESC_LEN to TUD_VIDEO_CAPTURE_DESC_UNCOMPR_LEN for consistency with this naming
could expand packed struct to also include bmCapabilities, wWidth, wHeight, dwMinBitRate, and dwMaxBitRate. They are common between the 3 types
I only checked the descriptors and class files as that is what I used in my setup. Some type consistency changes that also affect the functionality. Regardless, it runs fine on my setup, tested on LPC55S69.
Operating System
Windows 10
Board
Raspberry Pi Pico
Firmware
examples/device/cdc_msc
What happened ?
I am attempting to utilize the CDC device class to stream a large amount of data to the host PC, for example, to implement an EEPROM reader. However, I am unable to transfer more than about 128 bytes before the tud_cdc_write function simply stops sending any more data. The only way I have been able to get around this is by adding hard-coded delays between calls to tud_...
Hi @hathach - the keyboard itself is an OEM product, this is the product link but it doesn't contain too much detail.
It works ok with Windows and a PIC based USB host (which we are looking to replace with a TinyUSB powered Pico).
I've since also tried it with my MacBook which definitely doesn't like it (see attached), this now makes me think the keyboard isn't 100% USB compliant.
...
please put the debug text in a LOG.TXT file
@tswan-quasi
Thank you for your helpful comments. I feel that your comments helped improve this PR.
thanks to @jepler find out, we have a better understanding of this issue now
Jeff: Linux initializes serial ports with "echo" mode by default. This causes Linux to echo back all bytes it receives to the device. Standard terminal software like tio opens the device and promptly sets "-echo", but there is a race from open() to ioctl() during which characters can be echoed.
This appear to be the way Linux driver handle ttyacm, acm has init io as tty_std_termios, which has c_flag with EC...
Describe the PR
support stm32u5xx family.
change type of avail to uint32_t that matches the return type of tud_cdc_write_available(). It probably return 256 which is 0 in char type.
It seems that the checks are failing based on some MCUs that I did not modify files for? Did I do something wrong or how should I go about resolving this?
CI issue might be due to compiler bug,
internal compiler error: Illegal instruction
I tried that, it doesn't seem to work. I even tried copying this example from the Raspberry Pi Pico SDK stdio_usb.c code, and this just crashes my serial terminal when I try to connect to the port, and still no blinking of the board LED.
void cdc_task(void)
{
char buf[SERIAL_BUFFER_SIZE];
for (int i = 0; i < SERIAL_BUFFER_SIZE; ++i)
{
buf[i] = i;
}
if (tud_c...I will also appreciate that TinyUSB can work with 2 physicals devices ports to permit to link 2 usb host systems.
I inquired about this a while back, for other devices that support multiple device interfaces (STM32, etc), and it was not considered a priority.
Maybe there's some issues that I don't understand with doing that, but, IMO, it would be more useful than dual host.
My use case is in emulating a device from a machine that doesn't support device mode, like a standard PC. AFI...
It seems that the checks are failing based on some MCUs that I did not modify files for? Did I do something wrong or how should I go about resolving this?
no worries, it is ci issue, sometime when running multiple jobs too often. It runs out of bandwidth or got into network issue. I have re-run ci. Please give me a bit of time for reviewing and pulling out an lpc55 board for testing.
CI issue might be due to compiler bug,
internal compiler error: Illegal instruction
sometime ci failed due to network/bandwidth issues.
Is there any update or plan?
Currently not that i am aware of! Are you interested in extending the driver?Mit freundlichen Grüßen,Reinhard PanhuberOn 10/14/22, 13:30 mingpepe @.***> wrote:
Is there any update or plan?
—Reply to this email directly, view it on GitHub, or unsubscribe.You are receiving this because you were mentioned.Message ID: @.***>
It should be asserted just like other weak function.
It seems that the checks are failing based on some MCUs that I did not modify files for? Did I do something wrong or how should I go about resolving this?
no worries, it is ci issue, sometime when running multiple jobs too often. It runs out of bandwidth or got into network issue. I have re-run ci. Please give me a bit of time for reviewing and pulling out an lpc55 board for testing.
Ok no problem, thanks for letting me know
I am working on another device which has similar issue. As long as the device needs to dynamically allocate memory for endpoints, the device driver may have this issue.
If we solved it in certain driver, other drivers also need to solve similar issue. For example, for rp2040 current solution is deallocating all the memory until all endpoints closed, which may be an issue for composite device.
Hence, I think we need a simple memory allocator independent of driver. Then each driver can us...
Related area
ST Synopsys port
Hardware specification
Cortex M7, STM32H750, USB3300, custom board
Is your feature request related to a problem?
The port currently lacks support for USB SOF frames.
Describe the solution you'd like
I will provide a PR with my proposed solution
I have checked existing issues, dicussion and documentation
- [X] I confirm I have checked existing issues, dicussion and documentation.
Describe the PR
Adds SOF support for ST Synopsys port
Additional context
https://github.com/hathach/tinyusb/issues/1684
Describe the PR
This PR adds FIDO U2F Authenticator usage page and descriptor template for HID class.
Additional context
This descriptor is based on FIDO CTAP Protocol v2.1 specification. And it's tested in Canokeys project.
@kaspernyhus @PanRe I'm sorry this has sat around for an extraordinary long time without further feedback.
The current DCD implementation in dcd_esp32sx.c does not fully support isochronous transfers. Could you please try applying the attached patch, and let me know whether it works for you?
diff --git a/src/portable/espressif/esp32sx/dcd_esp32sx.c b/src/portable/espressif/esp32sx/dcd_esp32sx.c
index a9c31132..dee2c855 100644
--- a/src/portable/espressif/esp32sx/dcd_esp32sx.c
...I am keen to get this in the master branch so I can use it properly - is this stuck somehow, and can I help?
do we really need to have this. Have you experience issue with dcd data is overwritten. USB data shouldn't be accepted when active bit is not set
Thank you very much for the PR. I have tested both audio on HS and video on FS. Both works great, video HS does not seem to work (though it is probably issue with UVC or something else). The PR is almost ready for merging. Though I still have an question regarding dummy bytes, do we really need it. Have you experience issues without it ?
@perigoso @hathach any update about this?
On ESP32-S2/S3 ISO IN packets must be configured for even or odd frame. If they're not, they are transmitted only in even frames, so every second packet is lost.
Closes https://github.com/hathach/tinyusb/issues/1382
Describe the PR
Fix Isochronous IN transfers on Espressif's SoCs.
cc @kaspernyhus @libo
I'm seeing payload data in every packet now!!
Fantastic!
I'm seeing payload data in every packet now!!
Fantastic!
Good to hear that! Thank you for your patience
Very nice! Thanks a lot!!On 10/18/22, 09:57 Tomas Rezucha @.***> wrote:
I'm seeing payload data in every packet now!! Fantastic!
Good to hear that! Thank you for your patience
—Reply to this email directly, view it on GitHub, or unsubscribe.You are receiving this because you were mentioned.Message ID: @.***>
Fixes: 1234111 ("add get-deps target")
I think there is likely a better solution, but it was causing me some issues not assigning the offsets to another location.
In functions such as dcd_init() and others, the USB would write to the offset in _dcd.ep[...][...].buffer_xx.offset and I think because the value of the DATABUFSTART register is 0x2000000, the USB was overwriting some other values I had in SRAM. The reason I noticed it was because the LED blink_interval_ms in main() was not changing corre...
video HS does not seem to work (though it is probably issue with UVC or something else).
I think the UVC was only setup with FS support unless something has changed from #1118 original description
@hathach I would vote to merge the PR, you are good with that?
Just a short question, the driver in portable/synopsis/dwc2 does not work for you?
Hello,
this is not a bug, the audio_test example was written intentionally to send a sawtooth signal such that the tester can verify if all samples are received and nothing is lost due to e.g. too slow MCU or ISO driver issues or other shortcommings. The audio_task() is usually not used and only exists due to historical reasons - although it could be used in principle. The data sent is loaded into the audio buffers within the tud_audio_tx_done_pre_load_cb() callback function. This appr...
Please try again once #1690 was merged! Thx!
Currently this is a tricky question. The problem is, that the drivers are not informed about how many EPs in total exist for the current configuration and how big they are. This was a design question some time ago and it was decided that the drivers shall not come in contact with the configuration stuff. Hence, the driver must be able to allocate the space solely from the information given by the dcd_edpt_open() function time by time. This results in a fragmentation problem e.g. for the syn...
Operating System
MacOS
Board
BluePill STM32F103C8
Firmware
Custom firmware at https://github.com/manuelbl/JavaDoesUSB/tree/main/test-devices/loopback-stm32.
Build instructions are in the README. It's a PlatformIO project.
The code contains a copy of the relevant tinyusb parts including a fix for this issue.
What happened ?
When usbd_edpt_close() is called, the firmware crashes at https://github.com/hathach/tinyusb/blob/master/src/portable/st/stm32_fsdev/dcd_stm3...
Describe the PR
This is a fix for bug #1693, which prevented the use of usbd_edpt_close() for stm32_fsdev.
Additional context
Fixes #1693
This fix is needed for a custom vendor driver, which support alternate interfaces. See https://github.com/manuelbl/JavaDoesUSB/tree/main/test-devices/loopback-stm32.
The bugfix works for me, no frame is missed now.

By the way, the common dwc2 driver may have the same issue, which misses such configurations also https://github.com/hathach/tinyusb/blob/master/src/portable/synopsys/dwc2/dcd_dwc2.c#L662, as
I will send a RP later, it's much clear to see the code.
I agree that driver should not know about configuration. As I state previously, driver can tell the allocator how much RAM it has, the just call the allocator to get the buffer, then free the buffer while closing.
Since the previoused pull request not merged, I change the title. As disscussed in #540, memory fragmentation force drivers to manage memory. Some driver implement as release all memory unitl all endpoints(except ep0) closed.
It may solve the problem for certain usb class devie, however for composite device, like me, report a HID & UVC device, since HID host driver never clear the interface, the endpoints for HID never closed, this cause memory for UVC endpoints not released.
Of cours...
Hello - I know this is an old issue but I seem to be having the same issue as described by todbot on MacOS. I am currently testing this with a very generic python script to read/write HID devices (although have tested with multiple others). This script works on Linux but not on MacOS (I cannot confirm Windows). I can confirm my device is sending the hid report with no issues by using a Beagle USB protocol analyzer. The device in question is using the RP2040 chip. I am at a loss on where to go...
it is not clear enough that USB overwrite the data, even if that is the case, I think we should properly fix it e.g explicitly set SKIP/DISABLE bit for endpoint first before zero it out. Otherwise we could run into issue that host may think we already received data (overwritten to zero), while it is ended up in dummy. Maybe we should do it in a separated PR.
video HS does not seem to work (though it is probably issue with UVC or something else).
I think the UVC was only setup with FS support unless something has changed from #1118 original description
agreed, it is probably the issue with UVC than the driver.
as rule of thumb, dynamic memory won't be used in the stack since it is an errorr-prone. Could you explain your scenario in more detail. I have an idea to add max_iso_size to the dcd_edpt_open for ISO to help with reserving the max buffer without having to re-allocated when switching interface.
HID host driver never clear the interface, the endpoints for HID never closed, this cause memory for UVC endpoints not released.
in general, I don't like dynamic memory since it is error-prone. I plan to add max_iso_size to the dcd_edpt_open for ISO to help with reserving the max buffer without having to re-allocated when switching interface.
Loads of typo fixes. Please review carefully and let me know whether you want those split up, and how you want me to organise that. I used codespell to fix most of those, and reviewed everything manually.
thank you for the PR and sorry for late response. I have been too busy with other works.
I see that a
==was changed to>=. I'm not so familiar with SAMD, but I figure this could cause issues with INT IN endpoints:
- Class defines INT IN endpoint with
wMaxPacketSize=10- Driver sets hardware to use
wMaxPacketSize=16- Class starts transfer of 25 bytes.
- Peripheral transmits packet of size 10 which would confuse the host since it expects a max packet size of 10 bytes.
Thank you @pigrew for reviewing, this is SAMD port specific. SAMD endppoint can ...
superb! thank you very much for the port
superb! Thank you very much for yet another great PR. And thank @tswan-quasi for helping with reviewing. To be honest, I am still not catching up with UVC
I think I noticed it on the video example when I was testing because blink_interval_ms was getting overwritten at address 0x20000000. I will take a look again as well as seeing if I can find proper solution.
There should be no need to allocate memory dynamically, this functionality is already provided by the FIFOs! Or do i miss here something? Buffering data via FIFOs, for instance, is done in the audio driver under the hood.
Furthermore, it seems your solution only aims at rp2040? At least for the dwc2 driver we have the problem of USB hardware FIFO fragmentation... your approach would not solve this issue...
A repeatable setup for me:
- example: video_capture
- modifications: revert all lines using
dummyto before - OS: Windows
- when USB is asleep it blinks find. open the camera app, once the device is awake, the value of
blink_interval_msis 0 (address 0x20000000)
I didn't use try it. I didn't find info in the docs about which port(s) to use, so I tried st/synopsys (since using ST part), and it worked.
I think I have narrowed it down to dcd_edpt_xfer() when buffer is NULL, occurring for EP0 OUT ZLPs. The code below makes it modify dummy, and the other previous locations of dummy can be removed. From what I have seen, the USB writes 4 bytes of zeros to its offset location in this scenario. I am not sure if there is a proper solution to this aside from a dummy buffer?
bool dcd_edpt_xfer(uint8_t rhport, uint8_t ep_addr, uint8_t* buffer, uint16_t total_bytes)...Besides (presumably) supporting SOF already, what are other differences of that synopsys/dw2 port vs. st/synopsys?
@hathach the approach to add max_iso_size to dcd_edpt_open means driver may reserve the memory for particular endpoint? But for UVC class, one interface may have multiple settings for different resolution and frame rate, hence need different packet size. If the high-framerate setting was set first, then switch to low-framerate setting (two setting has different max packet size), the driver may still reserve the bigger one? If so, other endpoints (like vendor device or other class) may not...
@PanRe, I have traced the code for dwc2 driver but not test actually, just thought the close endpoint order depends on open endpoint order can be better.
Copy comments from dcd_synopsys.c
// "USB Data FIFOs" section in reference manual
// Peripheral FIFO architecture
//
// --------------- 320 or 1024 ( 1280 or 4096 bytes )
// | IN FIFO 0 |
// --------------- (320 or 1024) - 16
// | IN FIFO 1 |
// --------------- (320 or 1024) - 16 - x
//...
If the high-framerate setting was set first, then switch to low-framerate setting (two setting has different max packet size), the driver may still reserve the bigger one? If so, other endpoints (like vendor device or other class) may not have theoretically much memory to use (some memory is reserved by driver, but actually not used).
For now, I think it should reserve highest memory for ISO, since host can switch to highest bandwidth at any time so we don't have to deal with run-time me...
Closing of OUT EPs is not an issue since the memory of out EPs is shared for all OUT EPs. It is about the IN EPs (the TX buffers).You can close any IN EP any time, however, the allocated memory of the respective EP closed might be located in the middle of other allocated areas. The problem now is, that all TX buffers still existing would need to be relocated s.t. no gaps occur. However, doing so in the middle of ISO transfers would mean, that you need to wait until the TX buffer t...
Describe the PR
Local paths were committed to submodule definitions This just removes prefix for submodules path and name
oops, I totally missed this :D
For my application, I need to report as a HID device(interrupt ep) and UVC device(iso ep) and use the 2 devices independently. The following flow cause problem:
- open HID device -> allocate memory for interrupt ep
- open UVC device -> allocate memory for iso ep
- close UVC device -> as current rp2040 driver, since there are still eps other than ep0 opened(interrupt ep for HID) no memory will be deallocated.
Then repeat step 2) and 3) can cause out of bus memory.
Related area
Audio class UAC2
Hardware specification
STM32H7 (probably not relevant)
Is your feature request related to a problem?
UAC2 supports an interrupt endpoint to provide notifications to the hose about control changes (e.g. mute button pressed on the device).
I see that there is some code for this, but it seems incomplete.
I see audio_device.c never assigns a value to audio->ep_int_ctr.
Compare to feedback endpoint (which I have working), which assigns and cl...
Well without knowing too many details of the RP2040 hardware, is it not possible to remember which value next_buffer_ptr had at opening an ISO EP and at closing to reset it to the saved value? This would be a quick fix i know. It would work for only one ISO EP currently. How about starting this way?
@leebo Could you test if there is a potential bug? If so, could you please open a new issue therefore? Many thanks in advance!
It fuses the device driver for multiple MCUs as far as i know. I don't know why the st/synopsis driver is still there, maybe due to backward compatibilities.
Thanks, I'll give it a try in an hour or so.
Describe the PR
Compilation fails when audio interrupt-endpoint is enabled, due to storage attributes on a struct member
Additional context
Only memorize the value next_buffer_ptr for ISO EP is not enough as HID may open and close after UVC. To solve my problem in this way, 1 pointer is needed for each EP to record the buffer address. But the driver may not know how many EP exists but can only prepare the maximum EP number of pointer (16 pointers). This would be a quick fix, but I do not think it is a good way.
it does not fail with my compiling. This is required for some mcu. Could you provide info on your setup
For a single active configuration descriptor, HID will not be closed but only opened once the configuation is setup by tinyUSB. This means in generall, that control, bulk, and interrupt EPs are usually (according to the USB protocol) not to be closed. This only happens if a new configuration descriptor is setup and in this case, all EPs are closed.
ISO EPs to the contrary are setup from a command sent from the host. This can only happen once tinyUSB already setup all the remaining EPs. This ...
thanks @PanRe for detail explanation, indeed, so far for all practical usages, only ISO endpoint changes its size while in configured mode. for all other endpoints CBI (control bulk interrupt). @mingpepe your current issue with open/close ISO when switching alt interface can be resolved in much easier way in rp2040 driver. The upcoming max iso size when opening an iso can definitely help with this.
thank you very much for the fix. This is indeed out of my knowledge, we may also need to update the dwc2 as well to adopt this fix.
This is using GCC 12.2.0, st/synopsys port, STM32H7.
The attributes (CFG_TUSB_MEM_SECTION CFG_TUSB_MEM_ALIGN) are being applied to a member of a struct.
I don't think it makes sense (regarding memory layout) for some members of a struct to be in a different linker section to the rest of the struct?
The only instance of the struct is (around line 413):
CFG_TUSB_MEM_SECTION audiod_function_t _audiod_fct[CFG_TUD_AUDIO];
So the struct (and therefore its members) are alrea...
Yeah, thanks from me as well! I am currently trying to put the UAC2 audio class into a stm32.
I have built a lot of systems with USB interface and getting CDC class to run with the internal UART was exceptionally easy and I am really impressed by tinyusb.
This evening I tried the UAC2 stuff and I was very sad, when I found out, that it does not work at all.
I haven't done a lot with STM32's USB stuff, but if there is anything I could do to help, let me know.
Currently, the ep_int_ctr member is used, but never assigned.
So I'm guessing that I'm the first person to try building a UAC2 configuration with interrupt/status endpoint enabled.
Using synopsis/dwc2, I get into a crash-loop.
Almost certainly due to configuration on my side though.
I'll go back to using st/synopsys for now.
Once I've got my UAC2 interrupt status endpoint working, then I'll try synopsys/dwc2 again and see if I can either fix the issue in my code, or file a PR if it's due to a bug in tinyusb.
Since this is still open, with seemingly insufficient documentation, here's what I posted to the RPi forum a couple days ago:
https://forums.raspberrypi.com/viewtopic.php?t=341735
My entire project is over there, after paring it back down to what I think is equivalent to the uac2_headset example. (that's what I get for assuming that the examples "just work")
Essentially, it works immediately after plugging it in. It enumerates just fine, it appears on my Pi4 (Raspberry Pi OS, fu...
Relates to issue https://github.com/hathach/tinyusb/issues/1697
Describe the PR
UAC2 supports an interrupt endpoint to provide notifications to the host about control changes (e.g. mute button pressed on the device).
The interrupt endpoint lives in the control interface, and transmits 6-byte messages to notify the host about control values changing.
The host may then decide to issue a get-entity request via the control endpoint in order to read the new control value.
These in...
Working, but possibly ugly implementation: https://github.com/hathach/tinyusb/pull/1702
Hi guys, I had a look at the work from @Iktek and I could solve the issue with every odd buffer data being 0. The reason for this was as already suspected, that the second buffer in the double-buffer system was never written to.
With these changes I got the audio_text example working without buffer dropouts:
https://github.com/skuep/tinyusb/tree/0.14.0-isofix
Very nice! Thanks for pushing this forward! @skuep I saw that there is a small piece of untested code in your fork. Any chance you can test and finalize it?
Hi PanRe,
The untested portion is from @Iktek. I have not yet concerned myself with it, sorry. I am still working on verifying whether the opposite direction (SPEAKER instead of MICROPHONE) works with my code.
@PanRe The dwc2 port has handled this condition here, I'll test again to make sure.
I will pay more attention to this point, in the next pr, (ˉ▽ˉ;)...
I don't think it makes sense (regarding memory layout) for some members of a struct to be in a different linker section to the rest of the struct? GCC certainly doesn't like this.
Oh, this is right, please remove the CFG_TUSB_MEM_SECTION but keep the CFG_TUSB_MEM_ALIGN
Hi guys, I did not continue with my approach as I was waiting for a good state of @pigrew 's work. Because: my first approach still has the problem with different endpoint directions having the same address and this had to be tidied up first. This is mandatory because of UAC2 sync endpoint needing to have the same address as the corresponding data endpoint. Unfortunately I don't have much time to dig in the current changes of @pigrew, so I need to wait for some "stable" state of the code with...
Hi Iktek,
Are you sure that the endpoint address requirement is mandatory? I have had a quick look in Release 1.0 of the UAC specification (here https://www.usb.org/sites/default/files/audio10.pdf) and on page 61 in the "Standard AS Isochronous Audio Data Endpoint Descriptor" Table, there is at Offset 8 a field for bSynchAddressto define the synchronization endpoint address.
Can't we use that?
Hi @skuep, yes you're mixing up UAC and UAC2.
I also hat tests in implementing UAC class but the UAC-driver on windows does not really allow syncing. So in order to get a valid synced audio you would need to implement UAC2. And UAC2 has removed the bSyncAddress field. From UAC2 on the sync-address needs to sit on the same index as the corresponding data endpoint. So if you don't want to implement an ASRC on your device, you'd either need to have a sync-endpoint or you need to live with fram...
Thanks for your PR !
Which UAC2 document are you using ? In my side Interrupt Data Message is section 6.1 p129.
Hm, very dissatisfying, but thanks for the information. I would have gone on to work on using UAC1, since that is actually enough in my case. No way to get asynchronous clocks to work on a Windows machine?
Simon
Thank you very much for the PR. I am able to verified the issue with ZLP. It probably caused by USB/DMA controller, even though we schedule zero byte. The controller still clear/reset buffer probably due to its bug. I made it a bit generic to use dummy whenever we use ZLP for all endpoint (not only EP0) and for both direction.
@hathach @PanRe It's indeed much easier. I misunderstand that all endpoints may open and close. Thanks.
As discussed in #540, we can do it in a simple way.
That seems to be a mis-paste from my other work on isochronous feedback (§9.6 in USB20 document).
Hi again, @Iktek,
Can you give me a link to the @pigrew tinyusb fork? Is he currently working on this feature?
I just had some spare time and I have implemented a rather crude way of handling this issue.
See this commit https://github.com/hathach/tinyusb/commit/af46a53bdfaf925332bbff4446bc2196972b2c69
By default, the tinyusb stack works just as normal, but I added an application callback, that you can use to alter the "mapping" of the endpoint address to the internal endpoint registers.
...
Hi again, @Iktek, Can you give me a link to the @pigrew tinyusb fork? Is he currently working on this feature?
I got sidetracked, and didn't get nearly as far as I had hoped.
The tricky part is handling the allocations of the PMA for double-buffered endpoints (and I found that the existing code had some rather substantial bugs). I was rewriting the PMA allocation code and endpoint housekeeping to handle double-buffering.
The link is https://github.com/pigrew/tinyusb/tree/stm32_doub...
@pigrew: Thanks for the heads-up. I will dig through your changes and see what's what :-)
What issues with the PMA for double buffered endpoints did you have? Since tinyusb does not seem to implement any double-buffering features (for now?) I basically now just left everything as-is with PMA allocation and just set both (TX and RX) (double-) buffer locations to the same buffer.
Also, to get this (and feedback) working on my STM32H7 board, I also had to use this patch (for enabling SOF interrupt):
https://github.com/hathach/tinyusb/issues/1684
This is with the st/synopsys port.
I recently and briefly tried the synopsis/dwc2 port, but it didn't work out-of-the-box.
So I switch back to st/synopsys for now, and will look into the dwc2 issue sometime in the future.
@pigrew: Thanks for the heads-up. I will dig through your changes and see what's what :-) What issues with the PMA for double buffered endpoints did you have? Since tinyusb does not seem to implement any double-buffering features (for now?) I basically now just left everything as-is with PMA allocation and just set both (TX and RX) (double-) buffer locations to the same buffer.
EDIT: Had a look at your code. Yeah, you are totally right with the PMA allocation bug. I am going to steal...
@PanRe It works fine when using dwc2 driver for esp32s2/s3, no packet missed.

Yeah, this is exactly the problem we are running into here. I am currently still using the method of custom mapping the endpoint address to the hardware endpoint using a callback function. However I have made some progress in my fork:
- I added your fix regarding the buffer size during allocation to be aligned to the allowable hardware sizes
- I added what you call "indirection" into the code where it was necessary. I re-used the already present
xfer_ctl_tstructure
bInterfaceNumber could be other than 0, it's defined by _intfnum https://github.com/hathach/tinyusb/blob/28f49c088bb0c498d730d80943017172061cfd05/src/device/usbd.h#L442.
@PanRe could you take a look ? I havn't work on UAC for a moment 🤣
Ah sorry, this is leftover from when I initially hacked it together for my specific project. I'll generalise that soon.
Also, since there are several places where we sequentially search the descriptors for some specific descriptor, should I create a separate function for doing that, which takes a predicate as an argument?
It should reduce code-size a bit while not burning a significant amount of extra cycles as a result.
And the CPU overhead shouldn't matter much anyway since this is se...
Also, since there are several places where we sequentially search the descriptors for some specific descriptor, should I create a separate function for doing that, which takes a predicate as an argument?
I think there is no need to do it now, later we can generalize them with a function like tu_desc_search() if needed.
True, this number can be any interface number!
Thanks a lot! Indeed the interrupt EP was not implemented correctly! Since you are the first one who needs it, i am glad you fix the issues!
One thing, the naming convention CFG_TUD_AUDIO_INT_CTR_EPSIZE_IN was wrongly introduced and is misleading - CTR has nothing to do with the interrupt EP, so it should be skipped. Could you fix that if you have the time?
You may also skip that check since you already work on the descriptor corresponding to the right interrupt EP. Do we need to remember which INT EP corresponds to which interface? For sending messages via INT EP?
Operating System
MacOS
Board
Raspberry Pico
Firmware
usb/device/dev_hid_composite
What happened ?
I am trying to simulate a mouse moving at 1000Hz poll rate with the Raspberry Pi Pico. With the default descriptors, I am getting a polling rate of 250Hz. I changed the polling interval from 5 to 1 and I got 1000Hz on my MacBook 2019 with Intel CPU, as well as my Window...
The commit https://github.com/hathach/tinyusb/pull/1118 works well on ESP32S2/S3 with dcd_dwc2 driver
Add freertos versions of the two audio examples for use on the ESP32-s2/3
Thanks a lot and sorry for the late reply! I have but a few questions on this:
- do we need a separate buffer for the interrupt messages to be sent?
- where is the interrupt EP communication handled? I guess its outside the UAC2 driver currently. Does it make sense to incorporate the INT EP comunications somehow into the UAC2 driver?
- i know this could be a lot of work but i wanted to ask: could you come up with some minimum working example such that other users could start on INT EPs wit...
The buffer within the tinyusb audio device structure was there already when I started this work - I have no idea if it's required or if we can bypass it.
My board + build system are quite custom so I can't easily extract an example out or test an example project.
Here's the relevant code though for using this feature. I have a buffer containing three pre-determined messages, which I send incrementally when the audio controls have changed (which can happen by user using physical control...
Almost forgot, relevant part of descriptor. Goes in control-interface part of descriptor, i.e. before any of the streaming interfaces/alternates.
descriptor
#if USB_ENABLE_STATUS_EP
#define STATUS_INT_EP_DESC_LEN TUD_DESC_EP_LEN
#define STATUS_INT_EP_DESC() \
TUD_DESC_EP( \
ENDPOINT_AUDIO_INTERRUPT, \
HOSTIN_AUDIO_INTERRUPT_TYPE, \
6 /* Buffer size as per standard */, \
CONTROL_UPDATE_INTERVAL_LOG2P1 \
),
#else
#define STATUS_INT_EP_DESC_LEN 0
#define S...Project-specific implementation details in my case:
Basically - each thing that cares about the audio controls has a value in a CONTROL_OBSERVER_* enum to represent it.
These are "observers", example:
- The audio processor unit is an observer of the controls.
- The USB control/status unit is an observer of the controls.
- The serial user-interface is also an observer of the controls.
There's an array of observer flags (bool), one for each observer.
Whenever a control value...
The included DHCP server fails to process DHCP DISCOVER or REQUEST packages that don't contain the "DHCP MESSAGE TYPE" option as the first option in the package.
The initial report that triggered me was in https://github.com/OpenLightingProject/rp2040-dmxsun/issues/53 and after some investigation, I found that the "dhcpcd" client (maybe others, too) don't send the MESSAGE TYPE as the first option (see Wireshark dump attached in the linked issue). This seems to be valid since the order of the...
I've been using tinyUSB on the STM32L452 successfully for a few months, so I can confirm it works with the following changes:
In file dcd_stm32_fsdev.c:
+#if defined(STM32L452xx)
+#define STM32L4_FSDEV
+#endif
#if TUSB_OPT_DEVICE_ENABLED && \
( TU_CHECK_MCU(OPT_MCU_STM32F0, OPT_MCU_STM32F3, OPT_MCU_STM32L0, OPT_MCU_STM32L1, OPT_MCU_STM32G4) || \
- (TU_CHECK_MCU(OPT_MCU_STM32F1) && defined(STM32F1_FSDEV)) \
+ (TU_CHECK_MCU(OPT_MCU_STM32F1) && defi...Related area
Fuzz testing
Hardware specification
Host only
Is your feature request related to a problem?
No
Describe the solution you'd like
I'd like to improve the security and robustness of the tinyusb stack by adding a set of fuzz tests.
I have checked existing issues, dicussion and documentation
- [X] I confirm I have checked existing issues, dicussion and documentation.
Adds support for fuzzing with basic a cdc fuzzer.
Describe the PR
This fuzz harness adds the necessary build infrastructure for fuzzing tinyusb. As a proof of concept there is a cdc fuzz harness written in c++. The intention of this PR is to improve security and robustness of the tinyusb stack by tracking down bugs and performance problems using fuzz testing.
I'm happy to spend some time contributing to this one. I've got some general questions first though;
- Is it acceptable to you to have the fuzz harnesses written in a combo of c/c++. These fuzz harnesses would be run from the host only, so I think the overhead of c++ is acceptable given the ease of use of the fuzzing libs available in c++.
- Do you have the bandwidth to give some guidance on ...
The cdc_uac example has been added. This sample provides an audio interface combined with a serial port interface both working simultaneously.
Changed Freertos port for EFM32GG12 to ARM_CM4F as EFM32GG12 is not an M3, but rather an M4F based MCU
Fixes hid_composite_freertos example for SLTB009a
Thank you very much for this brilliant PR and every for helping testing and verifying. Indeed the datasheet seems to hint that these "Interrupt" endpoints are used for Interrupt type. Using them with bulk in asynchronous manner is a great find out. Which simplify the usbh driver.
Basically the interrupt and bulk have the same packet layout (pid, data, crc, ack), the difference is that bulk endpoint will continuously transferring data as long as bus frame (1ms) is allowed. For example, we c...
Related area
device stack
Hardware specification
rp2040
Is your feature request related to a problem?
I am currently working on porting https://github.com/rppicomidi/midi2usbhost to support USB host and device mode without providing different firmware and noticed that TinyUSB currently doesn't support compiling with USB host and device support at the same time.
Describe the solution you'd like
I would like to be able to deal with USB host and device switching in softwar...
Operating System
Others
Board
Raspberry Pi Pico
Firmware
I am working on a mass storage class demo program here. I am able to mount a flash drive, list directories and display file contents, but only if double-buffering is disabled.
What happened ?
When the fatfs code attempted to read the 512 byte boot sector from the flash drive, the code hung up waiting for the transfer
callback to be called.
How to reprod...
@hathach I can submit my patch as a pull request if you would like.
Operating System
MacOS
Board
raspberrypi pico rp2040
Firmware
examples/device/audio_4_channel_mic
What happened ?
The device succesfully shows up as a 4 channel USB device, but only 2 of 4 channels transmit the test data.
- Channel 1 & 3 transmit a low amplitude saw tooth wave (as expected)
- Channel 2 & 5 transmit total silence
How to reproduce ?
compile & flash example to rp2040
open in DAW (tested in Audacity & Ableton Live)
Debug Log as ...
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
@zjwhitehead Bulk support was added less than one day ago. You might find this project helpful. it demonstrates RP2040 MSC Host with FatFs. It uses a terminal CLI for common file manipulation commands.
[hathach/tinyusb] New branch created: fix\-rp2040\-minor
Describe the PR
- fix #1617
- also rename PIO_USB_PIN_DP to
PIO_USB_DP_PINand change its value from 2 to 20 - add support for PIO_USB_VBUSEN_PIN and its state.
- bump up pico-pio-usb
Describe the PR
Implement #1406 with Raspberry Pi4 as self-host. Current self-hosted set up is
- pico + pico-probe connected via USB
- pico-probe is /dev/ttyACM0
There are only a handful of tests currently. Due to limited power of RPI4, test_hardware workflow only run with commit done by user hathach for now. We will see how this approach turn out and maybe adding more tests and/or expand the self-host instance.
part of the HITL is implemented in #1724, It works with an RPI4 + pico running several device examples. The script does test try to interact with device image correctly e.g dual cdc, cat msc's readme, run dfu-util with dfu examples etc... It is neither perfect nor complete, but is a good start.
Note: due to limited resources on Pi4, currently only code committed by me (or after merged to master) could run the self-hosted instance
yeah, right. Thank you for the fix.
One of the builds has failed. But not due to my code changes. Rather it's an internal compiler error triggered by completely unrelated code (see below). This is not the only affected PR. I can see at least 3 more affected ones. And they don't all fail on the same code. It also affects the RP2040.
Are you aware of the issue? How should we proceed with this?
/home/runner/work/tinyusb/tinyusb/hw/mcu/nuvoton/nuc505/StdDriver/src/clk.c:26:5: internal compiler error: Illegal instruction
...@hathach I can provide a VM of my home server with a dedicated USB card if we go further :)
Performance won't be an issue as I've a EPYC 7232 with 128GB RAM.
I have bunch of dev boards with on-board debugger like LPCXpresso43xx or STM32F3-Discovery which can be used.
@HiFiPhile Thank you, that is a great computing power !! I will email you the token and setup steps to register an self-hosted instance. For dev boards, feel free to attach any boards that are redundant and/or one with same MCUs that your product is using. That will at least help to verify latest code with the mcu you are interested with.
Describe the PR
Add support for STM32L412 who use stm32_fsdev driver, Shuld also work for STM32L41xxx/42xxx/43xxx/44xxx/45xxx/46xxx.
Tested CDC ok on STM32L412-Nucleo.
Need to be tested with GCC since I'm using IAR.
Additional context
While trying to find a board for HITL setup, I found this board who use the same driver as STM32L0, which is used for our product.
Operating System
Others
Board
RP2040
Firmware
examples/device/uac2_headset
What happened ?
After upload the .uf2 file from uac2_headset example compilation it works, but after changing a song or keep listening for a while it fails calling the function tud_audio_set_itf_cb with parameters interface 1 alt X (alt varies between 0~2) but it always fails on this function. I also connected an UART to the pins 0 and 1 of the raspberry and it says `*** PANIC *** Hard as...
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
thank you so much @rppicomidi, i'm finally unblocked on my pico project and can now continue hacking on this. will keep track of this to finally update to a sane upstream version when this issue is resolved.
I admit that I'm not sure what I've broken with the CI. I don't think I touched anything to do with the rp2040 configs. I'll just double-check in case there is something I missed.
I'd like to add an additional question. Would you be open to using google's OSS-fuzz service for continuous fuzzing? It's a free service and will fuzz and send you updates when bugs are found.
Ok, I don't think I've missed anything, perhaps it's a flake?
Related area
Security/vulnerability reporting
Hardware specification
N/A
Is your feature request related to a problem?
I think I've found a security vulnerability, but I don't want to publicly describe the problem on a GitHub issue until the problem is fixed. Having a security problem published publicly would open people up to attack.
Describe the solution you'd like
I'd like some procedures to be in place to;
- Contact the maintainers of this repository with security ...
[hathach/tinyusb] Issue opened: #1730 RP2040\-Zero fails to show up as a USB device after disconnect
Operating System
Others
Board
RP2040-Zero
Firmware
examples/device/hid_boot_interface
But really, every tinyusb example I tested exhibited the same problem.
What happened ?
On RP2040-Zero, immediately after flashing the firmware, a TinyUSB device shows up and can interact with the computer.
However, upon disconnecting and reconnecting, the device no longer shows. Plugging it in to other devices also do not recognize the TinyUSB device.
Have noticed this with ...
Test with GCC 11.3, both cdc_dual_ports & cdc_msc runs well, while cdc_msc_freertos has some issues:
[79082.879597] sd 7:0:0:0: [sdb] Attached SCSI removable disk
[79246.553862] usb 4-1.2: USB disconnect, device number 7
[79247.544292] usb 4-1.2: new full-speed USB device number 8 using xhci_hcd
[79247.646280] usb 4-1.2: New USB device found, idVendor=cafe, idProduct=4003, bcdDevice= 1.00
[79247.646283] usb 4-1.2: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[7924...@kilograham Tagging Graham as it seems he may have written some of this code.
Note: Bootloader shows reliably the USB device, and the original QMK firmware on the Steno keyboard works fine; just the tiny usb implementation only works after a reboot.
Operating System
Others
Board
Raspberry Pi Pico
Firmware
I discovered this whilst experimenting with MSC host. I have my own demo code.
What happened ?
See issue described here. Code is built with Log level is 1, when
you plug in a USB drive, the control transfer fails and the terminal output is
[1:0] Control FAILED
If L...
Hi @hathach we updated our documentation about disconnection events, PTAL: https://docs.espressif.com/projects/esp-idf/en/latest/esp32s2/api-reference/peripherals/usb_device.html#self-powered-device
Update: The rp2040 zero issues seem to be separate; the issue with tiny_usb devices not showing on the steno board persist though; and are intermittent.. most times it doesn't work; but when connecting to a sleeping machine, it seems to be able to wake it up most of the time, then work correctly after.
I think I fixed the ci flake for the rp2040 in #1731.
Operating System
MacOS
Board
STM32 with OTG device (Synopsys DWC)
Firmware
--
What happened ?
The dwc2 code checks the wrong status register when processing the Rx FIFO:
// Loop until all available packets were handled
do
{
handle_rxflvl_irq(rhport);
} while(dwc2->gotgint & GINTSTS_RXFLVL);
See https://github.com/hathach/tinyusb/blob/master/src/portable/synopsys/dwc2/dcd_dwc2.c#L1316
The correct line should be:
} ...Thanks for that @rppicomidi
There is a typo though which causes issues on a mac:
#if MIDI_NUM_CABLES>1
TUD_MIDI_DESC_JACK(2),
#if MIDI_NUM_CABLES>2
TUD_MIDI_DESC_JACK(3),
#if MIDI_NUM_CABLES>3
TUD_MIDI_DESC_JACK(3),
should be
#if MIDI_NUM_CABLES>1
TUD_MIDI_DESC_JACK(2),
#if MIDI_NUM_CABLES>2
TUD_MIDI_DESC_JACK(3),
#if MIDI_NUM_CABLES>3
TUD_MIDI_DESC_JACK(4),
This allows to set custom descriptive names for virtual MIDI ports/cables. A MIDI port offers different functionality on the same physical USB device. The names make it easier to distinguish one from the other.
This is the tinyusb part needed for https://github.com/adafruit/Adafruit_TinyUSB_Arduino/pull/215
Oops! Thanks @AndrewCapon. Sorry @DatanoiseTV if my typo messed you up.
I got here from googling when having a similar issue. Basically if you write into the cdc buffer (or vendor ifc buffer in my case) and then the host stops reading it just sits in there. Then when you say open up your PC program again and start reading again it will get that old data. It would be nice to have a way to flush it out on the device side if there is a timeout, but in my case I just made sure to write my host program and communication protocol in a way that at startup it reads out a...
Hi guys, so I got UAC2 speaker and microphone working (thanks to @Iktek for the descriptor example above). See my tinyusb branch here:
https://github.com/hathach/tinyusb/compare/master...skuep:0.14.0-sk
Here is the device I have implemented. Note that currently, although feedback generation is working, it is lacking the long-term buffer drift prevention Feature required by the USB spec. So when playing an audio file for half an hour, buffer creeps dangerously low.
https://github.com/skue...
it is lacking the long-term buffer drift prevention Feature required by the USB spec (it is not implemented in tinyusb).
I've implemented a feedback method by keeping fifo at a stable level. https://github.com/hathach/tinyusb/pull/1463
Maybe it can help you.
Cool thanks! I will have a look at it.
I have been reading and thinking about how to do this and (as other people do) I think that a feedback purely based on FIFO count is not according to specs because you basically implement a P controller on your device (i.e. you use some kind of feedback to keep the FIFO count constant).
However, only the host is supposed to have a controller, the device only states the number of samples played. The spec then goes on and says that over the long term,...
So I am not sure if the dual controller scenario can result in instability issues in case the parameters are not chosen wisely.
In theory it's possible, so I've limited feedback min/max to a small interval.
I did all tests on HS, on which fifo level is easier to be regulated than FS, result is satisfying amount 44.1KHz to 384kHz.
However, only the host is supposed to have a controller, the device only states the number of samples played.
IMHO is the UAC specification who shoul...
IMHO is the UAC specification who should be blamed. What it want to achieve is a regulated loop, but in real it's not a closed-loop system as the feedback is only an estimation.
I agree. The UAC spec is not really the USB consortium finest work if you ask me. Why didn't they just specify that the device regularly send a monotonically increasing counter (integral) of all samples played up to now (and let it wrap around at 2**32-1). There would be no issue whatsoever with buffer level drif...
@paulhamsh Perhaps you can re-open this bug for investigation - I've encountered the same problem. IMHO the pio_usb.h file should be included in the source from release 0.14.0.
@noisysoil did you try this:
cd ~/pico/pico-sdk/lib/tinyusb
git -C tinyusb submodule update --init hw/mcu/raspberry_pi/Pico-PIO-USB
cd ~/pico/pico-sdk/lib/tinyusb
A little correction - for the submodule update this should be cd ~/pico/pico-sdk/lib (it's also best to reference $PICO_SDK_PATH environment variable instead of your directory).
However, git -C tinyusb submodule update --init hw/mcu/raspberry_pi/Pico-PIO-USB submodule update didn't work (same issue not finding pio_usb.h).
However, after some head-scratching, I performed a git submodule update --init --recursive in the Pico SDK source root (`...
@paulhamsh Forgot to mention for completeness the above is on Pico SDK tag 1.4.0.
Good point - I can’t remember if the submodule I ran actually worked.
The sdk root one definitely did.
But what I can’t work out is how to get ONLY the pico pi submodules and not them all - and there are a lot!
This is what I eventually did - shown here:
https://github.com/paulhamsh/PicoPiUSBMidiHostDevice
But I'm going to try the
CFG_TUH_RPI_PIO_USB
I agree something should be done about this, apparently Github now has a feature to contact project maintainers securely/directly in case of a vuln? Idk much about it tho...
I wasn't aware of that. But it looks like a great option!
Link to the docs for posterity;
It appears pretty easy to setup. But it would need to be done by someone with admin privileges.
Well, @hathach seems to be taking a break for now, but I imagine he'll be back soon. Thanks for the link, since I completely forgot other than hearing about the new feature thirdhand :D!
Yeah, I've emailed @hathach directly with directly with details of the vulnerability that I found. Got a reply mentioning that he was keen to take a look, but is currently away from his computer.
I don't think there is any need to rush into getting it fixed :). Though it would be nice to get a fix together in the next couple of weeks.
Describe the PR
Thank you to @HiFiPhile who providing an self-hosted ci runner with an attached STM32L412Nucleo dev board. This further expand the Hardware-In-The-Loop testing. Although the amount of test and action script is not optimal just yet, it is working well and we can further improve later.
just be back to my PC, will check this out in this week or so. Thank you for the issue/pr.
Operating System
Linux
Board
Custom RP2040 board
Firmware
https://github.com/rppicomidi/midi2usbhost custom version
What happened ?
I've built a custom board which has USB Type-C for Firmware Uploads (and during boot) and a USB Type-A which is switched to the D+/D- Pins with a FSUSB42 (and which power is controlled via MOSFET).
The select pin of the FSUSB42 is pulled low, so the device starts up with the USB-C being active for firmware upload.
Then the firmware puts...
Operating System
Others
Board
Custom RP2040 board
Firmware
Stock TinyUSB
What happened ?
Devices which are bus powered don't enumerate or power up on iOS devices, such as iPad or iPhone.
How to reproduce ?
Connect a USB device running the TinyUSB stack to an iPad or iPhone.
Debug Log as txt file
No response
Screenshots
No response
I have checked existing issues, dicussion and documentation
- [X] I confirm I have checked existing issues, dicus...
On further investigation, this seems to happen with some MIDI devices and unrelated to my USB MUX. For example, I cannot get a Novation Remote Zero SL to enumerate.
sorry for late response as usual, yeah, I remembered seeing some issue with double buffering in device (out endpoint), and thought that would also apply to host in as well
I forgot the detail, but disabling double buffered is not really an option here due to rp2040 Errata E4 #891 (also it hurts throughput). The optimal solution is figuring out what is wrong with double buffered and fix...
thank you @tore-espressif for the update, I will check this out next time I need to work on this issue.
As I recall Errata E4 has a workaround for single-buffered transactions, which you have already implemented in sync_ep_buffer(). I agree disabling double-buffering hurts throughput, but from my testing, it does not seem to hurt functionality.
The current code in _hw_endpoint_start_next_buffer() is
// For now: skip double buffered for Device mode, OUT endpoint since
// host could send < 64 bytes and cause short packet on buffer0
// NOTE this could happen to Host mode IN ...@hathach
I just tried the following code patch and it worked for MSC. If I only disabled double-buffering for IN endpoints, then
IN endpoints work fine, but OUT transactions do not complete; f_mkdir(), for example, locks up.
// For now: skip double buffered for Device mode, OUT endpoint since
// host could send < 64 bytes and cause short packet on buffer0
// NOTE this could happen to Host mode IN endpoint
bool const force_single = (!(usb_hw->main_ctrl & USB_MAIN_CTRL_HOS...E4 requires a walkaround when using host with single buffered mode, which is removed when double buffered is implemented. From my experience, the walkaround has its own bizarre issue and not working reliably as well. As mentioned above, going back to single buffered + E4 + walkaround is not a good approach. The optimal solution is fixing what is breaking with double buffered, maybe we just miss some logic/buffer/sync/schedule etc ...
btw, I really like your msc demo, I have written an sim...
@atoktoto I found a fix for hubs not working with this. I made the error in my original pull request. Would you consider adding this change to your pull request?
diff --git a/src/class/midi/midi_host.c b/src/class/midi/midi_host.c
index d242d33c5..bc87898cc 100644
--- a/src/class/midi/midi_host.c
+++ b/src/class/midi/midi_host.c
@@ -490,7 +490,7 @@ bool midih_set_config(uint8_t dev_addr, uint8_t itf_num)
p_midi_host->configured = true;
// TODO I don't think there are any ...Sure, I will to that tonight.
W dniu 18.11.2022 o 23:51 rppicomidi pisze:
@atoktoto https://github.com/atoktoto I found a fix for hubs not working with this. I made the error in my original pull request. Would you consider adding this change to your pull request?
`diff --git a/src/class/midi/midi_host.c b/src/class/midi/midi_host.c
index d242d33c5..bc87898cc 100644
--- a/src/class/midi/midi_host.c
+++ b/src/class/midi/midi_host.c
@@ -490,7 +490,7 @@ bool midih_set_conf...
Looks like your CI failure for the RP2040 build could be fixed in this PR #1716
Hi @atoktoto,
The last update from @rppicomidi fixed the enumeration problems but there are still data transfer problems, this fixes it:
diff --git a/src/class/midi/midi_host.c b/src/class/midi/midi_host.c
index bc87898c..8df1b200 100644
--- a/src/class/midi/midi_host.c
+++ b/src/class/midi/midi_host.c
@@ -529,7 +529,7 @@ bool tuh_midi_read_poll( uint8_t dev_addr )
if (in_edpt_not_busy)
{
TU_LOG2("Requesting poll IN endpoint %d\r\n", p_midi_host->ep_in);
- TU_...Describe the PR
following discussion from #1721, this PR add an msc file explorer example with the help of following 3rd-party library
- Elm-Chan fatfs http://elm-chan.org/fsw/ff/00index_e.html
- embedded-cli https://github.com/funbiscuit/embedded-cli
Tested on mcb1800 (ehci) and rp2040 pico with pio-usb as host controller (change CFG_TUH_RPI_PIO_USB =1 in tusb_config.h). Note: rp2040 native usb host controller has issue mouting msc device probably due to issue mentioned in #1721 ...
I just added an host msc file explorer example which work well with pio-usb but indeed has issue with native usb. The new example will probably help with troubleshoot this issue later on. Unfortunately, I have to switch to other work and will come back to this later on.
The delay is already done by usbh.c
https://github.com/hathach/tinyusb/blob/master/src/host/usbh.c#L1263
I have no issue with mounting msc with pio-usb. Could you give the new example a try #1746 to see if that work for you. Note: you need to change CFG_TUH_RPI_PIO_USB =1 in tusb_config.h
Great work fixing issues! I am working on an application you might find useful. It's not done yet, but I made the repo public now
to help with hub testing. See https://github.com/rppicomidi/midi2usbhub
@paulhamsh Apologies for the delay, here's my CMakeLists.txt for the project (with some cruft removed):
cmake_minimum_required(VERSION 3.13)
set(CMAKE_C_STANDARD 11)
set(CMAKE_CXX_STANDARD 17)
set(FAMILY rp2040)
set(BOARD pico_sdk)
include($ENV{PICO_SDK_PATH}/external/pico_sdk_import.cmake)
if (PICO_SDK_VERSION_STRING VERSION_LESS "1.4.0")
message(FATAL_ERROR "Raspberry Pi Pico SDK version 1.4.0 (or later) required. Your version is ${PICO_SDK_VERSION_STRING}")
endif(...Related area
New Port Support
Hardware specification
Windows 10 PC
Is your feature request related to a problem?
So projects using TinyUSB can be tested on a Windows PC without hardwares
Describe the solution you'd like
https://github.com/microsoft/UDE
Seems like Windows 10 supports USB device emulation, does this mean TinyUSB can be ported on top of it and presented to Windows as a virtual USB device?
I have checked existing issues, dicussion and documentation...
OK. Something to note when you get back to it. From the RP2040 datasheet, double buffer does not work for Host Interrupt
endpoints. I presume the same applies for Host bulk endpoints given how they are implemented now.
4.1.2.7.4. Interrupt Endpoints
The host controller can poll interrupt endpoints on many devices (up to a maximum of 15 endpoints). To enable these,
the programmer must:
• Pick the next free interrupt endpoint slot on the host controller (starting at 1, to a maximum of 15...
@rppicomidi yeah, I think you probably hit the nail on the head. I totally forget about this, and didn't pay attention to this. In this case we should disable double buffering for non-control endpoint with the current implementation + E4 walkaround. Hopefully this could buy us time to better support bulk endpoint without using interrupt endpoint for the sake of throughput later on.
Related area
new port support
Hardware specification
STM32G0
Is your feature request related to a problem?
no
Describe the solution you'd like
Hi.
ST's Cortex-M0+ microcontroller G0 series has USB FS device and host controller on G0B and G0C.
It seems it only supports G4 series right now. Is there any plan to support STM32G0 series?
Thanks for checking this request.
I have checked existing issues, dicussion and documentation
- [X] I confirm I have checked e...
question, please use discussion instead
I am new (clueless) to this microsoft UDE. But it sounds like a great way to emulate TinyUSB with windows. Also have you tried running Microsoft device examples, it would be helpful to detail the step to run/test since I am mostly on Linux and only has an decade-old windows laptop.
[hathach/tinyusb] New branch created: rework\-host\-msc\-complete\-callback
Describe the PR
- rework tuh_msc_complete_cb_t signature to use new tuh_msc_complete_data_t
- add user arg to all scsi command API that support complete callback
- also allow all host examples to use pico-pio-usb for rp2040
I am new (clueless) to this microsoft UDE. But it sounds like a great way to emulate TinyUSB with windows. Also have you tried running Microsoft device examples, it would be helpful to detail the step to run/test since I am mostly on Linux and only has an decade-old windows laptop.
No yet. I wish I know more about how USB works at a lower level to port it myself.
Describe the PR
Fix issue #1721 by disabling double-buffering for RP2040 host mode non-control endpoints.
Additional context
Issue #1721 discusses this issue and @hathach proposed the solution. I have tested this locally and it works for me.
I have submitted pull-request #1755 to fix this issue.
Describe the PR
Added board support files for ElectroSmith's Daisy Seed, sporting a STM32H7 mcu.
if i wanted to port TinyUSB to a new Arduino core, is Adafruit_TinyUSB_Arduino the correct starting place? how is it synchronized with the upstream TinyUSB?
Probably better to fork hathach’s TinyUSB library since that’s what appears to be tracked in this channel
I've tested this and still the system is freezing on f_open().
Last words before hangup:
SCSI Test Unit Ready
Queue EP 02 with 31 bytes ... EP STATE BUSY: 0OK
Buffer complete
on EP 02 with 31 bytes
MSC xfer callback
Queue EP 81 with 13 bytes ... EP STATE BUSY: 0OK
Buffer complete
on EP 81 with 13 bytes
MSC xfer callback
SCSI Read Capacity
Queue EP 02 with 31 bytes ... EP STATE BUSY: 0OK
Buffer complete
on EP 02 with 31 bytes
MSC xfer callback
Queue EP 81 w...thanks. i think i need to fork both, because i both need to port the upstream TinyUSB to support the new MCU, and to port the Adafruit library to glue it to the Arduino core. i was wondering what the process is for synchronizing the two, because the Adafruit library doesn't include TinyUSB as a submodule, and appears to have commits that are manual copies of portions of the TinyUSB code
@DatanoiseTV What is your test application?
With the latest changes on main, it works.
@hathach
I'd like to add a weak callback in tud_descriptor_string_cb() to allow MCUs to use Chip UID as serial number if available, which makes identify multiple devices easier, what do you think ?
@HiFiPhile the callback is already existed, did you mean you want to implement it.
Yeah, I am planning to add and board_get_uid()/board_get_usb_serial() similar to this implementation of tinyuf2 here, but always got too busy with other works.
I just encounter this issue while working on other task. Could you confirm the failed control occurred with the very first control by adding TU_LOG_LOCATION() here (with LOG=1)
If yes, then the issue is not host stack not waiting, since stack already wait 500ms (longer than USB specs requires). The bug is caused by device side start up is taking too long. A proper fix would be retry a ...
Yeah, I am planning to add and board_get_uid()/board_get_usb_serial() similar to this implementation of tinyuf2 here, but always got too busy with other works.
Yes it's what I'm talking about :)
[hathach/tinyusb] New branch created: host\-retry\-failed\-enumeration\-request
Describe the PR
Some device has large starting up and slow to response to first few request. This PR retry a few times with transfers in enumeration. Should fix #1732
@rich holly I'd suggest posting a discussion topic on the tinyusb repo
I am using a daisy seed board which runs a STM32H7 and I can confirm I too do not get the unplugged event. The hack described above does not work either.
@maxsimmonds1337 Info is here if you fancy building an example/demo.
@maxsimmonds1337 Info is here if you fancy building an example/demo.
Perfect, thanks @battlesnake
Please be specific on which example running on which board. No one except you has the custom board, so please try with pico. Also you need to provide debug log (LOG=2) as txt file as well.
move to discussion since it is not clear too me if the bug is caused by tinyusb stack or user error
look good, thank you for the pr.
thank you for the PR, tested with new msc example and work well. Though I still think using "Interrupt" Endpoint for BULK will limit the bandwidth to 1 packet per frame --> 64 KB/s. I will make an issue to remind us
[hathach/tinyusb] New branch created: rp2040\-host\-bulk\-comment
Describe the PR
mostly white space clean up
implemented by #1755 , thank you very much
Related area
Host Driver (HCD)
Hardware specification
rp2040
Is your feature request related to a problem?
BULK endpoint support for RP2040 HCD support is added thanks to #1434. Even though it works wonderfully However since the PR uses hardware "interrupt" endpoint to implement BULK, there is a drawback. The max throughput with "interrupt" endpoint is only 64 KB/s since controller will only carry 1 packet per frame which is max 64 bytes per 1 ms. This defeat the purpose of B...
Allow the use of non-static allocation for FreeRTOS mutexes & queues
Added some conditional code to the file src/osal/osal_freertos.h to check the FreeRTOS configuration option configSUPPORT_STATIC_ALLOCATION and if it is set to '0' We use the non-static variants of the queues, mutexes and associated creation functions.
This PR will add FT9xx support for more of the USB device examples.
There are fixes for the FT9xx MCU port. Fixes for properly handling back-to-back transactions on the control endpoint as EP0 must always be enabled and receiving - extended to all OUT endpoints. Prevent interrupt endpoints from transmitting ZLPs.
Signal xfer completions correctly (multiple for OUT transfers). Remove unnecessary volatile qualifiers.
Build flags and function names renamed to ft9xx/ft90x/ft93x to indicate tar...
Excellent! This solves a missing piece in one of my projects!
Hi @hathach ,
It seems one of the CI tests is failing (Build ARM / build-arm (rp2040) (pull_request)) , I have looked at the 'Details', there seems to be no clue as to why? If I need to change something, please let me know.
Kind Regards,
Pete
it is network/bandwidth issue, happen quite often now and then. Just re-run it.
Hi @hatach ,
I have also added another 'FreeRTOS' related commit to this pull request to eliminate the need to repeatedly call the tuh_task() when using FreeRTOS. You can just start tuh_task() as a normal task from FreeRTOS like this:
xTaskCreate( (TaskFunction_t)tuh_task, "USB", THREAD_STACKSIZE, NULL, USB_PRIORITY, NULL );
This eliminates the very small overhead incurred when calling the function continuously in a loop from another FreeRTOS task which is not necessary...
Hi @hathach ,
I have also added another commit here, I added the CFG_TUSB_MEM_SECTION macro to the declaration of struct _ctrl_xfer in usbh.c, this is required for my port also.
I hope that is okay.
Kind Regards,
Pete
thank you for the PR, though it is better to revert some of your recent changes.
please revert this change, only the buffer needed to be in the usb section, the xfer info is not
the StaticQueue_t sq; in the osal_queue_def_t need to be commented out since the type may not be available.
please revert this change, since we want application to be able to share usb with other background if needed
this will throw unused parameter warnings with semdef
Hi @hathach ,
I did check this and it seems it should always be available the way FreeRTOS is written, but for good measure I have added the #if configSUPPORT_STATIC_ALLOCATION clause to the sq variable, just in case anything changes in the future. 🙂
Cheers,
Pete
As you have requested I have reverted this commit but, I still have an issue with this as my port will not function without it, I will look into this further and let you know what I find... I suspect it is some sort of caching problem.
New commit will follow shortly...
Cheers,
Pete
My bad sorry... I have added (void) parameter...
New commit to follow...
Cheers,
Pete
I have also reverted this commit but I would like to discuss this further with you, I will create a discussion topic for it if you don't mind?
Cheers,
Pete
Operating System
Windows 10
Board
Raspberry Pico
Firmware
Not sure
What happened ?
I took the steps mentioned here (https://docs.tinyusb.org/en/latest/reference/getting_started.html)
I've cloned tinyusb to a local folder. Included tusb.c into my project.
When I compile I get an error in osal_pico.h about unable to find "pico/time.h".
Indeed this file can't be found on my computer.
How to reproduce ?
See above
Debug Log as txt file
No response
...
HSI is indeed correct spelling, maybe we should add this as exception.
Superb !! Thank you very much for the PR. codespell is indeed very useful, and there is tons of valid typos. Though the HSI in stm hal is correct.
I have rebased this pr since latest master has some conflicts, also reverted changes to stm32 hal conf (HSI). I also install codespell and run it locally to catch a few more typos.
I will make a follow-up PR to add codespell as part of the ci as well, it would help to prevent future typos. Thank you again for the PR.
Thanks for the thorough review!
I would appreciate it though if you could keep the authorship of the patch, or at least mention my name in the commit message.
I would appreciate it though if you could keep the authorship of the patch, or at least mention my name in the commit message.
oops, I am sorry, I should have done a merge. Let me see if I could fix this
I would appreciate it though if you could keep the authorship of the patch, or at least mention my name in the commit message.
fixed in the latest push, sorry for the mis-managed rebase earlier.
Describe the PR
- follow up to #1695 to run codespell in ci to check for spelling.
- also add ci group concurrency to cancel duplicate run
thank you for your PR. I have pulled and tested with existing examples on actual hardware. It worked great, I also clean up and put more update to existing examples to allow it to run with configSUPPORT_STATIC_ALLOCATION=0
[hathach/tinyusb] New branch created: hid\-fido
Describe the PR
Add FIDO U2F descriptors, supersede #1686
thank you for the PR, it looks good, though I would like to rename name symbol to sample uf2_hid.h from fido here https://web.archive.org/web/20210517033138/https://fidoalliance.org/specs/fido-u2f-v1.2-ps-20170411/inc/u2f_hid.h
unfortunately, I couldn't push to your fork's branch. I will made an separate PR with this commit as PR at #1776. Merging that will also have github marks this as merged as well.
Awesome, thank you very much for spending time and effort to adding fuzzing support.
- Is it acceptable to you to have the fuzz harnesses written in a combo of c/c++. These fuzz harnesses would be run from the host only, so I think the overhead of c++ is acceptable given the ease of use of the fuzzing libs available in c++.
Sure thing, I have no problems with C/C++ combo at all as long ...
sorry for late response, I was too busy with other works. The reason for change request: although it has more code, the additional condition CFG_TUD_CDC_TX_BUFSIZE < BULK_PACKET_SIZE is constant expression and will help the compiler to optimize it out.
Therefore we don't have to run tu_fifo_full() when bufsize is larger than the packet size (and const expression also not executed at all in other case)
would you mind changing the code to
if ( (tu_fifo_count(&p_cdc->tx_ff) >= BULK_PACKET_SIZE) || ((CFG_TUD_CDC_TX_BUFSIZE < BULK_PACKET_SIZE) && tu_fifo_full(&p_cdc->tx_ff) )
I think I fixed the ci flake for the rp2040 in #1731.
Sorry for super later response, sometime CI just break due to network/bandwidth issue since I have tried to run too many concurrent jobs (each for 1 supported mcu). It happens now and then, and often is fixed by re-run the failed workflow. I guess #1731 isn't related, sorry for not be able to response to this question of your in time.
I am learning fuzzing and basically try to catch up with your PR and making a good progress. Thank...
sorry for late response, the failed ci in #1716 is due to network/bandwidth issue (over use of ci jobs). I have re-run those failed jobs, it is a bit of a pain, but I will try to minimize number of running jobs (currently 1 job per supported mcu). So I guess this may not be needed. I often coordinate with rpi team to implement/test new changes/feature and having to run with latest pico-sdk is kind of neccessary.
Not a problem, I'm happy if you'd like to close this PR.
Not a problem, feel free to ask any questions here
Sweet, I'll open a WIP progress PR over at OSS-fuzz to integrate tinyusb. Is your '@tinyusb.org` email address associated with a google account? I'm just going over the requirements for accepting new projects with OSS-fuzz and one of them is a google email address.
https://google.github.io/oss-fuzz/getting-started/accepting-new-projects/#accepting-new-projects
Sweet, I'll open a WIP progress PR over at OSS-fuzz to integrate tinyusb. Is your '@tinyusb.org` email address associated with a google account? I'm just going over the requirements for accepting new projects with OSS-fuzz and one of them is a google email address.
https://google.github.io/oss-fuzz/getting-started/accepting-new-projects/#accepting-new-projects
unfortunately not, it is an office 365 email provided by hosting company. I have just created an new gmail for this purpos...
Easy I've added a draft initial integration here https://github.com/google/oss-fuzz/pull/9143 but I'll wait until the harnesses are merged here otherwise there isn't much point.
Please see the commit text for a description of the change.
Note that I now export hw_endpoint_start_next_buffer() and hw_endpoint_lock_update() in the header file, and because both the IRQ and driver code are doing read-modify-write operations the endpoint lock really should be implemented.
can you provide context and reason for this PR ?
This avoids a bug in rp2040. The device controller stops responding to host packets if it hits the condition described in the commit.
The state is effectively unrecoverable without a complete peripheral reset (not a USB bus reset) so it is far better to avoid it in the first place - host drivers do not respond well to a device that suddenly disappears from the bus.
thanks for explaining, do we have an document for this bug in rp2040 i.e is it an errata or a note somewhere in the rp2040 document. If possible, could you detail how is your hw setup and step to reproduce the issue if possible. I would like to try out the before and after pr to see if that would fix the issue and/or making change update later on without breaking this fix.
An errata note will be published in due course.
I have pushed a testcase to https://github.com/P33M/rp2040-e15-testcase - this is an SDK-compatible widget that defines a vendor-specific interface using TinyUSB. Bulk OUT packets are discarded, bulk IN packets are pseudorandomly sized and submitted to the hardware at arbitrary times.
The expected behaviour with the included python script is that the transfer will continue forever, but with a pico plugged into a Pi 4 directly, will crash aft...
Describe the PR
- update ceedling to 0.31.1
- move unite test to test/unit-test
- also add paths filter for build workflows
superb !! thank you very much for your time and effort (as well as your patient). Fuzzing is a realy useful/helpful testing for detecting memory overflow/leak issues. Which help to improve tinyusb a lot in the long run. Thank you very much for introducing and adding harness.
PS: I have move fuzz into test/fuzz and integrate build fuzzer into pre-commit since it is quick to run on linux host, so it kind of make sense to bundle them together to save concurrent ci instances.
I will close it, since #1716 is already merged
Not a problem, glad I could help. I'll put up a few more fuzz harnesses for the remaining device classes shortly.
[hathach/tinyusb] New branch created: fix\-fifo\-memory\-overflow
I'm going to work on an HID device fuzzer next up. I'll keep you posted here as to what I'm working on so that we don't overlap.
Also I'll see if I can get the oss-fuzz integration working shortly too!
Operating System
Linux
Board
Raspberry Pi Pico
Firmware
Raspberry Pi SDK - master branch, using TinyUSB 0.12.0
What happened ?
A struct definition in header file src/class/audio/audio.h is missing two fields, compared to the definition in "USB Device Class Definition for Audio Devices Release 2.0".
See the definition of audio_desc_input_terminal_t starting in line 719 of file audio.h
Compare with table 4-9 in the USB document.
Missing fields are: bTerminalID ...
Code was only reading the first 64 bytes of a 512 bytes packet.
For some reason, code was working if receiving a single packet strictly below 512 bytes. But when sending a USBTMC message which lead to a data stage longer than a single packet, only the first 64 bytes where read.
This seems to be only due to the "arming" of transfer which where obviously only asking for 64 bytes (constant).
Use macro argument instead of 0x16 constant value.
At least Linux kernel was complaining about this value, giving the following warning:
"config 1 interface 0 altsetting 0 endpoint 0x82 has an invalid bInterval 22, changing to 8"
(warning obtained using usbtmc device config)
Not a problem, glad I could help. I'll put up a few more fuzz harnesses for the remaining device classes shortly.
thanks again :)
thank you, the main developer for usbtmc @pigrew only has FS device to test with. There is a recent update to get it running with HS #1531 , too bad, I keep "forgetting" to test it out. I will do a full revise later on.
"Here is the device I have implemented."
Hi,
It means you succesfully implemented the TinyUSB audio class to the STM32F30x family? It's really good news, because the CubeMX generated audio code is not working on the F103 and F303 controllers, but works of the F4 family. I tried the TinyUSB audio test example a few months ago, same, it worked with the STM32F411, but not with F103 or F303.
Maybe your solution is working on the SRTM32F10x family as well, Bluepill etc.?
A simple example lik...
can you paste the link to the code in master branch, the 0.12.0 version is too old and line number may not be correct. Also please try to update tinyusb as well to see if it fixed recently.
I don't know why the CI build is failing. It builds fine locally under CMake.
Describe the PR
Enumerating new devices starts with an HCD_EVENT_DEVICE_ATTACH event, but requires several more events to finish. If another HCD_EVENT_DEVICE_ATTACH event arrives before the current enumeration is complete, it will clobber _usbh_ctrl_buf and cause assertion failures. This can happen on a Raspberry Pi Pico with Pico-PIO-USB and multiple root hub ports.
This patch makes the host task enumerate one device at a time, by che...
Jep, It is working so far with a STM32F302 which is, as far as I can tell, largely compatible with the STM32F103, therefore it should work.
However it needed a lot of tweaking of the STM32 driver in TinyUSB and also still has some crude solutions, like the static mapping of endpoint addresses to hardware endpoints using a callback function. Thus I use my own TinyUSB fork here: https://github.com/skuep/tinyusb/tree/0.14.0-sk
While the project I have linked above is not a USB audio speaker ...
The bug is still there in master, and the line in the file is still the same.
Thank you very much for the fast reply.
I did a quick test: downloaded your AIOC and TinyUSB code, and compiled it in STM32CubeIDE. Success, no errors.
Unfortunately I have no STM32F302, so I blindly uploaded the firmware to a STM32F303CCT6.
It enumerated as mono speaker and mic, plus serial port. Wow, this uC-s has to be very similar... :-)
No sound output on PA4, the pin is floating - probably the chip is different here. Also checked the Led outputs, 36MHz signal on one of them.
Next I try to port the code to the 303, figure...
@silvergasp we probably need to update the oss-fuz pr to match the new folder location of fuzz in test/fuzz
Cool!
Yeah, I think those MCUs are similar enough :-) It is mainly a question of the USB peripheral. But as long as it is this USB-CAN combined peripheral with at least 512 Bytes of Packet-Memory-Buffer, it should work.
Can you try changing the MCU type to your STM32F303 type? (And check that a new define is set in the project settings). Maybe that it is already enough so that a different device header file is used during compilation.
Btw, did you connect the AIOC to a Windows PC? That...
Btw, did you connect the AIOC to a Windows PC?
Sure, it enumerated as mono mic, speaker and serial port. When I plug in the usb, win11 selects it as audio output, and silence. If I select the audio output to the normal and back to the uC, it's always working. However no sound on PA4, probably there is a difference in the DAC peripheral. The absolute bare metal DAC init is a bit steep for me :-), I usually use CubeMX for the job.
I touched the pins to check if it's working as mic, no respo...
Up to my knowlegde, dcw2 is intended to fuse all the device drivers of the individuel MCUs together. This, however, is work in progress and unfortunately bugs fixed in dwc2 may not be fixed in the individual drivers and vice versa. I think the docs should be improved to inform everybody of its purpose...
The audio class works fine so far, most bugs reported regarding audio concern the ISO EP support in the device drivers. The same holds true for fsdev.
I am happy there is progress for the 1...
In order to port the code to the 303, I first started DAC with DMA in a new empty project. CubeMX generated me a faulty code. It initiated the DMA and the DAC in the wrong order, set a register in the DAC before it has clock. Takes me several hours to figure out, but now works. However, at first look no need for DMA in your project, so dont't know why I bother with it...
Just FYI: I also use CubeMX and had this issue. I posted it to the forum and it should be fixed in the current CubeMX ...
In order to port the code to the 303, I first started DAC with DMA in a new empty project. CubeMX generated me a faulty code. It initiated the DMA and the DAC in the wrong order, set a register in the DAC before it has clock. Takes me several hours to figure out, but now works. However, at first look no need for DMA in your project, so dont't know why I bother with it...
I would just load the STM32CubeIDE project fromy AIOC repository. Then go into project settings and change the MCU to ...
I would just load the STM32CubeIDE project from my AIOC repository. Then go into project settings and change the MCU to the STM32F303 instead of 302. Hit compile again and try the code.
It compiled without errors for STM32F303CC.
Enumeration on win11: mono speaker, mic (TinyUSB Device), serial port
The serial port is working.(tested using putty terminal and scope)
It's possible to select it from win11 as sound otput, volume control works (except no sound).
No sound from the DA...
Forgot to mention, in device manager/sound, video etc
device configured (usbaudio2.inf)
device started (usbaudio2)
@silvergasp we probably need to update the oss-fuzz pr to match the new folder location of fuzz in
test/fuzz
Yeah I'll take a better look tonight
Debugging captured my mistake immediately... :-)
I started the program in debug mode, then plugged in the USB cable. It enumerated. When I touched the volume control on the PC, debugging stopped, TU_Assert Isochronous not supperted yet.
It means I copied the official Tinyusb into your AIOC project instead of your mod. (I downloaded it in .zip format, this way without the linked TinyUSB).
After correcting my mistake it's working. :-)
Worth to mention, that in debug mode it still halts on a...
thank @P33M for detail explanation and steps to reproduce. Though currently I have set up my PI4 to run self-hosted ci tests and don't have access to it to test this out in a week or so. Do you need to merge this urgently, otherwise I could try this out next week.
Just to confirm have you made any commits with that gmail account?
I've marked the OSS-fuzz integration as ready to merge https://github.com/google/oss-fuzz/pull/9143. Hopefully everything is in order and it get's merged relatively soon.
Describe the PR
While trying to fix an issue reported in https://github.com/hathach/tinyusb/issues/1729 (detected using fuzzing #1716). I am able to fix a couple of issues with current tusb_fifo when using with overwritable mode
- Prevent double overflowed to happen which make fifo count invalid. Though due to the cost of moving memory, the data at read index is not replaced by newer one.
- fix _tu_fifo_remaining() return incorrect value which cause memory overflowed, detected by fuz...
new test to test fifo double overflowed handling.
this test is similar to one detected by fuzzing, which will cause memory overflowed (memcpy to out of buffer boundary) caused by _tu_fifo_remaining() return incorrect value when fifo is in overflowed state.
@PanRe I added implementation note for fifo. If you have time, please review this to see if I miss anything.
running test_write_overwritable2() with the pre-pr fifo will cause nWrap_bytes > f->depth (out of boundary access)
double overflowed detection and handling with overwritable fifo
Just to confirm have you made any commits with that gmail account?
yeah, I did, just made all recent merged and commits with that gmail account.
It compiled without errors for STM32F303CC. Enumeration on win11: mono speaker, mic (TinyUSB Device), serial port The serial port is working.(tested using putty terminal and scope)
Nice! you can also theoretically wire those pins in loopback configuration to test it.
I am HAM, HA6TI, and often use FT8 mode on my Xiegu G90. I have a xgcomm USB-digimode-3 interface, it's basically an usb soundcard, no serial port, so no built-in CAT control. It has a high bit adc/dac, but it's proba...
It compiled without errors for STM32F303CC. Enumeration on win11: mono speaker, mic (TinyUSB Device), serial port The serial port is working.(tested using putty terminal and scope)
Nice! you can also theoretically wire those pins in loopback configuration to test it.
I am HAM, HA6TI, and often use FT8 mode on my Xiegu G90. I have a xgcomm USB-digimode-3 interface, it's basically an usb soundcard, no serial port, so no built-in CAT control. It has a high bit adc/dac, but it's proba...
Please merge - we consider it important enough that we are doing a point release of the Pico C SDK to pick up this change.
Please merge - we consider it important enough that we are doing a point release of the Pico C SDK to pick up this change.
In this case, I will try to review the code changes without hw testing as soon as I could in the next couple of days. And will try to do hand-on testing later on.
Hi @hathach ,
I can add this to my PR if that is helpful - let me know...
Cheers,
Pete
Is it still throwing the assertion?
No, it!s working in debug mode with connected jlink too.
Out of interest: Is there any standardized or at least widely-used connector?
AFAIK no. My rig has a 3.5 stereo Jack for serial communication (CAT and fw update), and a 8 pin mini Din for audio IO (for fans of contact failure).
@pete-pjb sure thing, if you already have the fix ready.
Operating System
Linux
Board
stm32f103_mini_2
Firmware
examples/device/dfu
all about stm32 board maybe have same problem
What happened ?
terminal print
`arm-none-eabi-gcc: error: unrecognized command line option '-Wcast-function-type'; did you mean '-Wbad-function-cast'?
../../rules.mk:130: recipe for target '_build/stm32f103_mini_2/obj/src/portable/st/stm32_fsdev/dcd_stm32_fsdev.o' failed
make: *** [build/stm32f103_mini_2/obj/src/portable/st/stm32_fsdev/dcd_stm32...
but in makefile, I can remove this parameter and it doesn't seem to affect compilation.
ah right, I remember putting the TODO expecting this issue in the future. Though I think we should use _dev0 e.g setting its rhport/speed to invalid as available instead of introducing a new variable.
Add USB memory macro to USB host control structure, to enable full un-cached implementation. See this for details.
Add NULL pointer check to EHCI host module as discussed here
Add weak function prototype to hcd.h for cache control, see discussion [here](https://github.com/hathach/tinyusb/discussions/1769#discussio...
Further commits to come to support caching...
Fix ifdefs such that uart is not used for stdio by tinyusb when it is disabled via pico_enable_stdio_uart in CMakeLists.txt.
Without the extra guards, the compiler infers that a null pointer deref will take place when the pico stdio uart object is accessed in tinyusb and aborts compilation.
[hathach/tinyusb] New branch created: fix\-midi\-len
Describe the PR
fix issue reported in Arduino TinyUSB version here https://github.com/adafruit/Adafruit_TinyUSB_Arduino/issues/223
all look good, thank you very much for the PR
You may comment here, that this loop is executed at most 3 times since the usable index space is limited to 2*depth and the index will be reset to the wrapped value if idx >= depth - for all who think this is a computational bottleneck
Does this prevent the out of bound error to happen? Would it not be better to take care _tu_fifo_count() does not return a value bigger than f->depth? Then you could avoid the overflow check here and at the same time sanitize _tu_fifo_count()! Also f->depth == count should be ok, this means the buffer is exactly full!
How about checking here if the cnt value is ok?
return (f->depth >= cnt) ? cnt : 0;
indexes -> indices ;)
Could you elaborate this handling here in a bit more detail? It is just difficult to follow everything here. For example, is it not possible, that the condition n >= f->depth also captures the condition overflowable_count + n >= 2*f->depth?
Hi @hathach ,
I am just in final testing of caching code and should be done in next few hours...
I will hit the 'Ready for review' button when I am done.
Kind Regards,
Pete
take your time, there is no need to rush
right, I will add a note here
this internal _tu_fifo_count() is also used to determine overflowed condition. I think you are the original writer, so I thought this is your intention to return count > depth for this purpose :D
@PanRe double overflowed but when the last n is only 2.
No you are right, i just saw it... sorry it is some time i had this code in my head by heart :D - forget this comment here please :D
They are overlapped a bit but not the same. I did put a note on the header file (did mentioned you there). Overflowed (single/double) only occurred with over-writable fifo where we repeatedly write() without doing any read(). Which is a case of cdc when first enumerated but dtr/rts is not set. Or with DMA but the writer is running much faster than reader.
There is also a unite test case for this https://github.com/hathach/tinyusb/pull/1789/files/04a5c03ea8ea70510c332f0fafb44daf0ec7c7fb#di...
yeah, memory fades as well, and take a bit of time to revise and re-understood the fifo implementation. That is why I put a lots of effort in the header the implementation note.
Maybe a comment: Overflow is in the range of [0,2*depth) and thus detect and recoverable. Recovering is handled in fifo_read().
I got it, maybe a comment for later: Overflow is bigger than the allowed range [0,2*depth) and thus not detect and as such not recoverable in the read function - we need to handle the overflow condition here
In this example, mem[4] and mem[5] were empty so there is no reason to copy them?
ah right, I mean move data from mem[3] to read index, will update the comment. an typical off-by-one mistake :D
i would do
delta = time_us_32() - last_sof
to avoid rollover issues (not a biggy but still)
maybe include parked_eps in the loop condition and unset as you go - i can't imagine we expect many
True, most applications will use an average of 2 low-numbered EPs for bulk.
Rollover would mean the time check would not apply for one frame in every 4.29 million, which is arguably a bug.
Hi @hathach ,
A quick update, I am still not quite ready, I have also not been well today so not on the ball....
I will continue with it tomorrow now and hopefully request your review then...
Kind Regards,
Pete
Operating System
Others
Board
Custom ARM CM33 board
Firmware
TinyUSB configured for one CDC and one USB Audio link
What happened ?
Lets describe a simple setup with 2 FreeRTOS tasks (Task1= TinyUSB, Task 2 = other process), with FreeRTOS scheduler not using time slicing (i.e same priorities tasks will run only when the other task will either suspend or yield):
- Task2 is running
- USB interrupt happens for audio EPOUT, which enqueue data using osal_queue_send function...
Looks good! Nice that the buffer would be fuzzing-proof :)
Is there anything else to improve since you mentioned there would be room therefore!
it looks like a bug, since you are at it and have your setup testing it. Would you mind making an PR to fix this bug ?
Well, sorry I'm pretty new to this and will try to find how to make this PR. Will probably be able to do that in the next week.
Describe the PR
- add macro to swallow mutex API in order to simplify code with mutex
- should have no impact on code behavior
Looks good! Nice that the buffer would be fuzzing-proof :)
Is there anything else to improve since you mentioned there would be room therefore!
just update the PR with your feedback, thank you for reviewing. For room to improve, I feel that we could do better to simplify the current code, but it is not urgent. Like merging get_realitve_poiinter() and _ffmod() to idx2ptr(), mostly for readability and maintenance only. I will try to wrap this up soon enough.
Well, sorry I'm pretty new to this and will try to find how to make this PR. Will probably be able to do that in the next week.
That is OK, if you are not familiar with PR, would you mind giving the exact permanent link to 2 lines of code that you think we should change here, and maybe post the suggested code change here as well.
Hi @hathach ,
A quick update, I am still not quite ready, I have also not been well today so not on the ball....
I will continue with it tomorrow now and hopefully request your review then...
Kind Regards,
Pete
no problem at all, no rush as mentioned above. Take care of yourself, we can always do this later on.
Required for builds that do not use LWIP
The "netif/ethernet.h" include adds LWIP dependency, and is required for the SIZEOF_ETH_HDR constant which is known to be 14 bytes. Our build uses TinyUSB but not LWIP.
I still see the same issue with latest master. I think the issue is back again.
add semaphore reset support for rt-thread
Describe the PR
implement semaphore reset support for rt-thread
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Describe the PR
Running audio example on pico, I am still hitting the following assert:
hard_assert(hw_data_offset(next_buffer_ptr) <= USB_DPRAM_MAX);
Additional context
The issue is that pico implementation only reclaim the memory when all the endpoints are closed. In audio example, speaker and mic may not share the same lifecycle. This end up the crash.
I fixed this to implement a poor man allocation algorithm to track 64 of the blocks with 64 bytes. Since there are only 64...
I proposed a PR #1802 to fix this issue.
Fix FreeRTOS task switch even if not required (unitialized variable usage)
Describe the PR
See https://github.com/hathach/tinyusb/issues/1798
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Hi,
I tried to make a pull-request. Let me know if this worked.
Regards,
Hi @hathach ,
Sorry for the delay but I am back on the ball now!
I have now added two new external weak function prototypes to hcd.h as follows:
// Optional MCU Data Cache control if you require this please implement the functions in your hcd_platform.c file
TU_ATTR_WEAK extern void hcd_dcache_flush(uint32_t addr, uint32_t data_size);
TU_ATTR_WEAK extern void hcd_dcache_invalidate( uint32_t addr, uint32_t data_size);
It also turned out with my platform I needed to...
had TU_VERIFY,delete if case
Describe the PR
had TU_VERIFY,so delete if case
Additional context
If applicable, add any other context about the PR and/or screenshots here.
This looks spot on in my opinion. 👍
Thank you for your update, I have a couple of questions/suggestions regarding the usage of dcache API. Feel free to correct me if necessary.
minor: could you remove the extern, since this is supposed to be implemented by hcd.
do we really need to flush this ? We don't make any transfer yet, would you mind trying without this flush.
for all calls of weak functions, it must be check with if first. Since not all compiler could skip un-implemented weak function (which is typically resolved to NULL in symbol table).
if (hcd_dcache_flush)
{
hcd_dcache_flush((uint32_t)ep_desc, sizeof(tusb_desc_endpoint_t));
}
we should both invalidate (for rx) and flush (tx) this buffer. In general, I think we should move this dcache flush + invalidate into qtd_init() function.
look good, thank you. Apparently freeRTOS only set this to TRUE if needed (i.e never set this to FALSE). I have assumed it will set in both cases
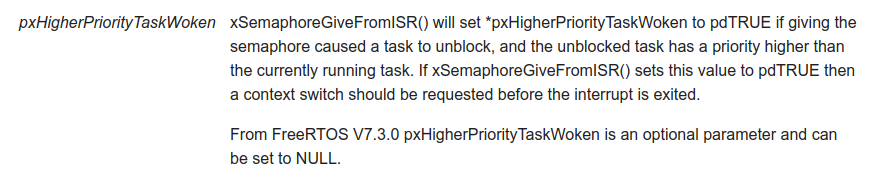
No problem I will change this... I was just following your lead here 🙂
I wasn't aware of this, so no problem I will make the changes. 🙂
I will check this, I am still getting to grips with the USB protocol in general and with the code base, I haven't had time to extensively study the code yet, so please bare with me. 😊
As above...
I will check this, I am still getting to grips with the USB protocol in general and with the code base, I haven't had time to extensively study the code yet, so please bare with me. 😊
As above...
I will check this, I am still getting to grips with the USB protocol in general and with the code base, I haven't had time to extensively study the code yet, so please bare with me. 😊
Personally, I wasn't keen on using cache functions inside the interrupt handler as it adds latency to the interrupt, on my platform that might be around 6uS worst case which isn't hideous but it will vary on other platforms. Do we want to try it this way or try and keep the cache code away from the ISR?
What do you think?
Thanks for your feedback @hathach.
Kind Regards,
Pete
Related area
No NKRO possible with tinyusb?
Hardware specification
rp2040 feather
Is your feature request related to a problem?
I‘m currently facing the issue that I am unable to get N key rollover to work. If there is any way to do it currently please tell me.
Describe the solution you'd like
I don‘t know any solution.
I have checked existing issues, dicussion and documentation
- [X] I confirm I have checked existing issues, dicussion and documentation.
ok, I think this is the right place to give some feedback as I have just published a project using the UVC implementation: An rp2040-based Game Boy adapter that captures the bus communication between the Game Boy and a game cartridge, runs it through an emulator and outputs the gameplay footage video via USB. (More infos: blog article with details, source on github).
**So, first of all, than...
NKRO support really has to do with your HID report descriptor, and is not a TinyUSB issue. There's an example of NKRO in CircuitPython here: https://learn.adafruit.com/custom-hid-devices-in-circuitpython/n-key-rollover-nkro-hid-device. CircuitPython uses TinyUSB internally.
Describe the PR
This PR add support for Host CDC along with a new endpoint stream API, which can be used by both device/host for buffered bulk endpoint such as cdc/midi/vendor.
[hathach/tinyusb] New branch created: fix\-cdc\-buf
Describe the PR
This typo exists a long time ago, and it is a total mystery why tinyusb does not crash and works flawlessly so far !!
Hi @hathach ,
Just a quick update, this has turned out to be much more work than I expected. I am now spending some time reading up on the USB/EHCI specifications so I can do this correctly. I have also had a request from my boss to add MSC support also which means I really should get a good cached version of the EHCI driver working as the performance will be much better. It wasn't so important previously for my application as I was just handling HID devices. This also means I need to in...
I compiled CircuitPython with p_cdc->epout_buf and with &p_cdc->epout_buf, and the resulting .elf and .asm's are identical.
This is a peculiarity of references to C arrays: https://stackoverflow.com/questions/2528318/how-come-an-arrays-address-is-equal-to-its-value-in-c.
So though it's a little "wrong", adding the & doesn't do anything.
There's a demo program in the link above, and here's one I wrote before finding that:
#include <stdio.h>
typedef struct {
char b...thank you @dhalbert for looking deeper and detail explanation. Luckily array and &array` have the same value, C is really a mystery language :D
Operating System
Linux
Board
Any
Firmware
This happens on current TinyUSB master branch
What happened ?
Both of these functions imply in their docstring that you can peek at any specific position in the FIFO, but then the offset parameter is missing
// Get a byte from FIFO at the specified position without removing it
bool tud_cdc_n_peek (uint8_t itf, uint8_t* ui8);
https://github.com/hathach/tinyusb/blob/master/src/class/cdc/cdc_device.h#L...
thanks for reporting, index is used to be supported by removed recently due to lack of usage. I will update the doc later on.
[hathach/tinyusb] New branch created: more\-host\-cdc
Describe the PR
- add missing tuh_cdc_peek() API
- correct function description reported in #1811
Related area
Documentation request
Hardware specification
A (possibly small) selection of supported architectures
Is your feature request related to a problem?
My apologies if I've missed this somewhere, but I've looked around and can't find any size metrics. I did find a mention in the getting started page for for checking the size...
It's hard to know what the actual resource requirements are without hard numbers. I would suggest adding columns for "code size" and "ram...
Just a suggestion. It might be worth enabling -sanitizer=address which will detect any overflows in your unit test.
Operating System
MacOS
Board
STM32F103C8T6 Blue Pill
Firmware
examples/device/net_lwip_webserver
What happened ?
Building LwIP web server example for STM32F103C8T6 Blue Pill with NCM stack throws an error
How to reproduce ?
Steps to reproduce it:
- Go to examples/device/net_lwip_webserver/src/tusb_config.h, and modify
CFG_TUD_ECM_RNDISto1 - Go to examples/device/net_lwip_webserver and build:
make BOARD=stm32f103_bluepill all
Debug Log as txt file
...
Hello, we may try this https://github.com/sakumisu/CherryUSB/tree/master/port/xhci first, then consider merge to tinyUSB, since it's all for MCU/SoC @hathach @31kothari @kaushalmp
I have try xhci on CherryUSB for a while, function like mouse/keyboard/mass-storage are okay, but have some touble handling hub, I have little experience on Hub, if some one handles help ...
thank you very much for your PR.
Just a suggestion. It might be worth enabling
-sanitizer=addresswhich will detect any overflows in your unit test.However that particular flag does require clang.
yeah, this is great idea. I will check to see we could switch to clang. Unit test like fuzzing run on host, so that wouldn't be an issue at all.
since it is power through ipad/iphone, Apple tightly manage current, make sure your device draw less than the limit of those device. Otherwise, iDevice can cut off the power.
[hathach/tinyusb] New comment on issue #1817: Building LwIP web server with CDC\-NCM throws an error
the warning/error is fixed by #1819 however, you still couldn't compile with stm32f103 due to lack of SRAM. You may try to alter/hack some settings to save some ram
Describe the PR
This is a minor change to the USB Video class implementation to accept a too small wLength during probe and commit requests in order to fix MacOS compatibility.
Additional context
My (UVC project)[https://github.com/Staacks/gbinterceptor] as well as a minimal example on a Raspberry Pi Pico based on the examples here fails on MacOS during SET CUR Probe because wLength is set to 0x22 instead of the expected 0x30. This behavior can actually be observed with WireShark...
Update:
I got it to work on a MacBook with Intel CPU by allowing too small wLength values (see this pull request). MacOS sets wLength to 0x22 instead of 0x30 during probe and commit and it does so consistently also with commercial devices.
However, I still have problems on a MacBook with M2 chip. Here the image is green and distorted and by comparing the raw data on the USB bus (which looks correct) with the data that actually reaches ff...
@Staacks that is a brilliant project, thank you for sharing. Regarding the issue with macos, feel free to post/file more issue/discussion or anything you find while troubleshooting. I am sure to help whenever possible.
thanks, It is only minor things, I sometimes mix thing up a bit.
sure we can skip dcache or any function within ISR if possible. I think you could try to both invalidate and flush following memory location in hcd_edpt_xfer() an hopefully this would be enough:
- data buffer
- qtd (since ehci controller update this)
- qhd (ehci also update it via qtd overlay).
it should be removed, we will do it in hcd layer.
Hi @hathach ,
Just a quick update, this has turned out to be much more work than I expected. I am now spending some time reading up on the USB/EHCI specifications so I can do this correctly. I have also had a request from my boss to add MSC support also which means I really should get a good cached version of the EHCI driver working as the performance will be much better. It wasn't so important previously for my application as I was just handling HID devices. This also means I need t...
we should only clear what we handled i.e parked_eps
pending_nonperiodic_xfer &= ~parked_eps
However, since pending_nonperiodic_xfer is accessed by both dcd_edpt_xfer() and sof isr. There is still chance for race condition since both try to read-then-set the variable.
rp2040_critical_frame_period() should also be checked here as well, since this will also trigger an usb transaction. I think this place will likely to cause the issue than one in dcd_edpt_xfer() since it schedule packet back-to-back here.
SOF should only be enabled when needed.
pending_nonperiodic_xfer are both read-then-set in both here via dcd_edpt_xfer() and sof isr. There is a race condition e.g
- we need to set with 0x02 mask, after the read here when pending_nonperiodic_xfer = 0x01
- sof isr occurred, process the 0x01 and clear the bit, sof return
- pending_nonperiodic_xfer is set with 0x03 therefore incorrectly schedule an redundant transfer.
[hathach/tinyusb] Pull request review submitted: #1779 rp2040: avoid device\-mode state machine hang
late review since I was busy with other works. After going through the change, although the pr fix a severe issue, however due to the impact of this PR in performance i.e 20% off bandwidth and force to have sof (which will hurt power consumption). I would like to do actual hand-on testing with the PR before merging. Though I couldn't do that until another week.
Meanwhile there is a few issues I think we should fix first
- Since this only occurs with bulk in transfer, we should only enab...
Describe the PR
Currently OSS fuzz expects to have complete control over the sanitizer flags. As we currently have these set it's causing problems with the OSS fuzz build. Instead we should use the provided variables from the OSS fuzz build environment. For local testing we'll create a set a well defined defaults.
Additional context
https://github.com/google/oss-fuzz/actions/runs/3761908047
So I've got some CI feedback from the OSS-fuzz repo, and it looks like there was a few build failures. I've put up a PR here that should mostly address these problems.
This is been locally tested for integration with OSS fuzz, and everything is working. I had locally tested before, though I missed a few things. Fingers crossed this fixes those issues.
Apologies the flag is -fsanitize=address docs here https://clang.llvm.org/docs/AddressSanitizer.html
@skuep
Hi, I made some commits based on your fork, which includes:
- Rebased on master
- Minor fixes
- Reworked FIFO based transfer
- Added an endpoint allocator
I've tested with my CDC & HID composite device (mine FIFO enabled CDC class fork), could you test with your UAC enabled project ?
Especially if endpoint alloc/free goes well, you can also modify UAC class to enable FIFO based transfer.
Cool! I will have a look tomorrow 😊
Update: SOF is only used to sync time, maybe we don’t need to sync it every frame, and could only need to sync every 1000ms or so. Since sof is very consistent from host.
I'm working on the stm32_fsdev driver in order to add ISO and FIFO transfer support.
It has the same fifo allocation limitation as dwc2, currently the allocation size is decided when the first time EP is opened, it can't be reopened with a bigger size.
I plan to add max_iso_size to the dcd_edpt_open for ISO to help with reserving the max buffer without having to re-allocated when switching interface.
I think it's a good idea.
Thats great news! I also think it's a good idea!! Great you work on it!
I'm working on the
stm32_fsdevdriver in order to add ISO and FIFO transfer support. It has the same fifo allocation limitation as dwc2, currently the allocation size is decided when the first time EP is opened, it can't be reopened with a bigger size.I plan to add max_iso_size to the dcd_edpt_open for ISO to help with reserving the max buffer without having to re-allocated when switching interface.
I think it's a good idea.
Please do, I think the api is simple enough,...
Thank you for the PR.
My (UVC project)[https://github.com/Staacks/gbinterceptor] as well as a minimal example on a Raspberry Pi Pico based on the examples here fails on MacOS during SET CUR Probe because wLength is set to 0x22 instead of the expected 0x30.
I guess MacOS runs as a UVC 1.1 host. UVC 1.1 spec. shown below

And UVC 1.5 spec. shown below.
 and 9 zero samples... I can ensure what is written into the PMA buffer is right.
With my logic analyzer decoder dump (limited USB analyze capacity) it seems streaming data is correct, which makes me wondering if Windows has some UAC2 implementation issue...
Have you noticed this behaviour with the other MCUs as well? Do you have the chance to test it on a linux system?
I did not notice such missing samples on windows when i tested it with the saw tooth signal, there were no missing samples
I did not notice such missing samples on windows when i tested it with the saw tooth signal, there were no missing samples
How did you make Windows to enumerate without adding one sample to CFG_TUD_AUDIO_EP_SZ_IN ?
I mean the audio_test example available in the example folder.
I mean the audio_test example available in the example folder.
Yep, without changing CFG_TUD_AUDIO_EP_SZ_IN to 49*n Windows will report error 10, that's why I'm fixing it :)
You did the same thing in audio_4_channel_mic example
#define CFG_TUD_AUDIO_EP_SZ_IN (48 + 1) * CFG_TUD_AUDIO_FUNC_1_N_BYTES_PER_SAMPLE_TX * CFG_TUD_AUDIO_FUNC_1_N_CHANNELS_TX // 48 Samples (48 kHz) x 2 Bytes/Sample x CFG_TUD_AUDIO_N_CHANNELS_TX Channels - the Windows driver alw...What with debian it works? At first glance i thought the MCU might have been too slow in updating the saw tooth values between the frames.
I once also found this 49*n value by trial and error and thought that might have been a precausion from the windows UAC2 driver to have a sufficiently big buffer.
And what i also found was "noisy" recordings i.e. a saw tooth signal with noisy values added. You can test for that by sending only zeros.
This was an impact of the UAC driver chosen in Windows. One (i dont recall which) had this problem, another (the one for the 4 channel if i remember correctly) did not show this noisy samples. My guess was that some drivers conduct some digital filtering in some weired manner...
At first glance i thought the MCU might have been too slow in updating the saw tooth values between the frames.
My logic analyzer attached to D+/D- line dumped correct 48 samples so it can't be the cause.
And what i also found was "noisy" recordings i.e. a sawtooth signal with noisy values added.
For a moment I had noisy sample on Linux, but it disappeared adjusting volume and I can't reproduce it.
My finding is Linux handle volume in host side, but volume set by SET_REQUEST ...
Describe the PR
For stm32_fsdev:
- Minor fixes
- Rework FIFO based transfer
- Add an endpoint allocator to overcome ISO ep limitation
For ISO transfer:
- Add dcd_edpt_iso_alloc() / dcd_edpt_iso_activate() for ISO EP buffer allocation
- (WIP) Handle new allocation method in UAC2.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
I think it's better to add a flag somewhere to choose new buffer allocation method or continue use old one.
For example in tusb_mcu.h add TUP_DCD_ISO_ALLOCATION, or add it inside audio_device.c like how USE_LINEAR_BUFFER is handled.
Does anyone know how to build a simple RP2040 device version of tinyusb in C? The examples I worked through are too complex (I just want to send gamepad reports)
Composite device was dropping reports constantly (busy?) I can’t tell
Were you following this? https://github.com/raspberrypi/pico-examples/tree/master/usb/device/dev_hid_composite

GitHub
Contribute to raspberrypi/pico-examples development by creating an account on GitHub.
Yes I stripped the composite example down but it is just a mess to follow. After successful init I constantly drop reports (they do not complete to the _cb)
I probably drop 1 in 10 reports issued
Hmm okay, you might try using the Arduino examples for it. Then just use Adafruit HID libraries
Hmmm that’s a good idea I didn’t think of
I think it's safe now, captured with Wireshark looks good.
audio_test_capture.zip
I've also redid a BusHound capture on a Realtek sound card which gives also zero samples, so it should be a BusHound / Windows issue.
@kkitayam Hi, I'm working on ISO EP buffer allocation based on #540, since video class is also ISO, does it benefit from this ?
Is this new dcd_edpt_iso_alloc() / dcd_edpt_iso_activate() suitable for video ?
Great to hear! I will do the review today once i get some spare time! As always, thanks for your effort in enhacing our audio driver! :)
@HiFiPhile
Hi, thanks for your comments.
Maybe yes, the APIs would be suitable for UVC too.
My understanding is that UVC controls ISO EPs in basically the same manner as UAC.
By the way, UVC can also use bulk EPs instead of ISO EPs for non-linear editing. Current UVC implementation has not supported this.
If we try to add support bulk EPs for UVC, we might be need some APIs like as dcd_edpt_iso_alloc() / dcd_edpt_iso_activate() for bulk EPs. It's just a guess. I am not familiar fo...
A new audio test example with multiple formats / data rates is added, which benefit from the new buffer allocation method :)
Yes i think this is a good idea! For us it might be a bit more work but the user does not need to be aware of this new allocation feature and we thus will get less issues reported ;)
Great work btw!
Related area
Port support.
Hardware specification
MSP430F5638.
Is your feature request related to a problem?
The current MSP430F5xx_6xx port fails to properly enumerate if the device is externally powered and
- The USB cable is inserted after calling
tusb_init()or - The cable is removed then re-inserted after a previously successful enumeration.
Describe the solution you'd like
I made some changes to the MSP430F5xx_6xx port that I believe resolve the issue. The...
Operating System
Others
Board
Custom RP2040
Firmware
https://github.com/rabbitholecomputing/RP2040-TinyUsb-keyboard-leds
What happened ?
After multiple calls toggling a USB keyboard LEDs tuh_hid_set_report starts returning false.
Tracing my original code (https://github.com/rabbitholecomputing/QuokkADB-firmware) the issue is [_ctrl_xfer.stage == CONTROL_STAGE_IDLE);](https://github.com/hathach/tinyusb/blob/7004914d8c6c7d88908776eb153661b6b987e513/src/host/usbh.c#L5...
I have checked that there are no side-effects. No problem.
On macOS, 6 bytes following UVC 1.1 data member are not initialized by the host. However, the current implementation does not use these data.
For anyone who is interested, PR is up #1828, including a new example audio_test_multi_rate to demonstrate multi-format support.
My test is done on STM32L072, any feedback is welcome.
Very nice! I did not yet get around to testing your branch.
Funnily enough, I am also currently working on getting multirate to work in my AIOC project 😃. I ran into problems where Microphone and speaker use the same clock. Will definitely have a look into your code.
Thanks a bunch!
I am on travel, will check this out next week.
Related area
FreeRTOS OSAL.
Hardware specification
Custom MSP430F5638.
Is your feature request related to a problem?
I'm getting an integer conversion resulted in truncation warning in osal_queue_send() from the third argument of xQueueSendToBack() when using TI's CGT compiler version 21.6.1 LTS. The warning stems from the fact my device is a 16-bit system and my port is configured for 16-bit ticks using configUSE_16_BIT_TICKS but OSAL_TIMEOUT_WAIT_FOREVER is defin...
@skuep
For the moment I kept your SOF callback but for the stack it's not quite the right place to do it.
Did you test the tud_audio_feedback_interval_isr and found out it has too much jitter ?
If a prioritized SOF callback is needed we need do it in a generalized way for other DCD drivers.
Yeah I am also still on the fence with this callback.
From the looks of it, the generated feedback values in the speaker feedback endpoint had way less jitter for the UAC2 application. However I did not check if this actually makes a difference for the (stability of the) feedback control loop running on the Host. Since I can only test Linux hosts, I left it in there for a better gut feel in terms of compatibility.
I do however think it would be a nice addition, if this would be a more ge...
[hathach/tinyusb] Pull request opened: #1835 Implements deinit functions for host/device mode switch
Implements tuh_deinit() and tud_deinit() to uninitialize host/device mode.
Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Describe the PR
Seems IAR is not happy with empty ; in struct
typedef struct {
bool is_host; // host or device most
union {
uint8_t daddr;
uint8_t rhport;
uint8_t hwid;
};
uint8_t ep_addr;
uint8_t ep_speed;
uint16_t ep_packetsize;
uint16_t ep_bufsize;
// TODO xfer_fifo can skip this buffer
uint8_t* ep_buf;
tu_fifo_t ff;
// mutex: read if ep rx, write if e tx
OSAL_MUTEX_DEF(ff_mutex);
}tu_edpt_stream_t;
*...
Hummm it's either GCC or IAR not happy :(
Hi @hathach ,
Happy New Year!
I am going to close this PR and submit a new one which just makes the small changes as my development system is having issues right now. I will then create a new PR for the caching code later.
Kind Regards,
Pete
Add NULL check to loop in list_remove_qhd_by_addr() function in ehci.c
See discussion here for some background about this PR
@hathach I'm sure you're busy but I'd love to see this PR progress when you have time! There's a PR that has begun to add support for the v307 to MicroPython and I'd like to add TinyUSB to the mix.
I have a v307 dev board so if I can help test just let me know.
Meanwhile there is a few issues I think we should fix first
- Since this only occurs with bulk in transfer, we should only enable SOF when needed i.e when there is active bulk-in within 20% last frame. This will minimize the impact on current consumption. Since not all device make use of Bulk in endpoint e.g HID device. And even with MSC/cdc device, it is more often than not, device sitting idle than transferring data. and when it does, it is more often within first 80% frame.
...
Super! Thank you very much, I am on travel and haven’t tested it locally but it look great
Sorry for the delay in testing your branch. However I have found a serious bug in the code that you based your commits on.
I updated the original branch that you used. See the latest commit here:
https://github.com/hathach/tinyusb/compare/master...skuep:tinyusb:0.14.0-sk
I first noticed corrupted memory on only some of the devices, which was really hard to debug. I narrowed it down to the TU_ASSERT that I added to the code in this commit. It turns out, that you need to set the receive bu...
Updated to guard the entire section with the endpoint lock. Note that the loop exits if parked_eps = 0, and pending_nonperiodic_xfer is volatile. So taking a local copy avoids emitting tons of loads/stores inside the for loop.
Accesses to this variable are now guarded by the endpoint lock (which implements a pico-sdk critical_section). Would you prefer folding the variable into the hw_endpoint array?
@skuep Thanks for your update ! Indeed I have only tested IN EP.
[hathach/tinyusb] Pull request review submitted: #1779 rp2040: avoid device\-mode state machine hang
one thing i had been vaguely wondering about before this change is why the existing methods have +1, -1; this implies to me that re-entrancy is required, however this implementation does not support it.
If re-entrancy is not required, I think we should make that explicit.
thank you for your PR. This should fix #1782
this is not suitable for a feature request
@hathach I'm sure you're busy but I'd love to see this PR progress when you have time! There's a PR that has begun to add support for the v307 to MicroPython and I'd like to add TinyUSB to the mix.
I have a v307 dev board so if I can help test just let me know.
yeah, sure thing. I was waiting for wch devkit to test this out (it takes 2 months to ship) and I totally forgot about this one. Will test this out as soon as I could.
Apologies the flag is
-fsanitize=addressdocs here https://clang.llvm.org/docs/AddressSanitizer.html
unit-test is now configured to run with clang and -fsanitize=address https://github.com/hathach/tinyusb/pull/1789/commits/e885ced0fed0a59d093db09c3e7325457d863fc1 , thanks for your suggestion.
which RTOS you are using, the osal_none does have an TU_ASSERT() when adding item to queue.
I'm using FreeRTOS, via ESP-IDF. What's the point of the return value in osal_queue_send if there is a TU_ASSERT, i.e. the return value is supped to be always true?
@hathach Any thoughts on this?
thank you @Staacks for the fix and @kkitayam for reviewing
this should be fixed by #1789, thank you @silvergasp very much for bringing this up and also making effort to add fuzzer as well and pr to integrate tinyusb to google fuzzing.
Related area
device stack
Hardware specification
rp2040,generic
Is your feature request related to a problem?
Kind of.
I'm trying to use tinyusb from adafruit tinyusb (which if I understand it correctly uses this project)
I made a wrapper class for the midi device but I would need two additional functions to manage cable_num:
tud_midi_n_available
tud_midi_n_stream_read
They take cable_num as arguments but do nothing with them.
Describe the solution you'd like
...
Describe the PR
IAR doesn't support anonymous volatile struct
Alrighty!
I have switched my tinyusb submodule reference to your branch. I adjusted the SOF timing measurement code (due to removal of the tu_stm32_sof_cb callback. What can I say, it works very well so far!
The PMA and hardware endpoint allocation works quite nice, verified everything looks good in the xfer_statusmap.
From my side of view, testing was successful! Thanks a lot
@skuep
That's a great news !
PS: One thing very useful is J-Scope, I used it to visualize FIFO level while adjusting feedback loop.
Tested successfully with the AIOC project
https://github.com/skuep/AIOC
Great, thanks! Now I have to figure out why M1/M2 platforms discard half the transmitted data while it is working perfectly on MacBooks with Intel CPUs...
IAR build tool has Linux & cmake support, I sent a mail to ask if they can offer license for open source projects.
https://github.com/IARSystems/bx-github-ci
Describe the PR
This PR will trigger the fuzzer to run for 10min on every PR with the goal of catching bugs before they are merged.
Additional context
https://google.github.io/oss-fuzz/getting-started/continuous-integration/
This is intended as a more "surface level" fuzzing to catch obvious bugs before they are merged, the complete OSS-fuzz system will find deeper bugs that you can't find in 10min minutes or so of fuzzing. We can of course extend this time from the default of 10min it's you want a "deeper" fuzzing analysis for the PR tests.
[hathach/tinyusb] Pull request review submitted: #1844 feat\(ci\): Adds oss\-fuzz integration on PRs
superb !! Thank you very much for your effort to make tinyusb safer
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
Hi @hathach , @MasterQ32 , @pm-mic @rppicomidi @zjwhitehead
I am working on a host port for the Xilinx Zynq7000 SOC and I came across this page which contains some very useful information about USB and Mass Storage, if you haven't already seen, it I would suggest taking a look.
It's helped me a lot with my issues so far...
I hope it is helpful.
Kind Regards,
Pete
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
this should be resolved in current master. Try out this example to see if that works for you https://github.com/hathach/tinyusb/tree/master/examples/host/msc_file_explorer
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
Hi @hathach ,
Thank you for your reply, I thought the link in my previous post might help everyone who is working on various MSC projects on this thread. I wasn't actually asking for help, but this is where I'm at with my port so far...
I am using FreeRTOS+FAT rather than the elm-Chan FAT so I have written my own drivers for +FAT. Currently I have managed to mount a filesystem and I can read files. I am currently able to write files but I am having issues with data corruption, these ar...
Hi, I have a QT py m0 (atsamd21e18a) board. I can run msc_ramdisk tinyusb version 1.17.0 on it. It works perfectly. Before that, I could run msc_sdfat (16Gb) on a seeeduino xiao (atsamd21g18a) on tinyusb version 0.10.5. but the problem is that I want to run msc_sdfat on QT py m0 (atsamd21e18a), the code compiles perfectly, and I upload it on the device. But the storage is not opening and OS shows this "please insert a disk into a removable device." I should mention that I checked the connection sd card reader to QT py m0 by running this example program SD -> ReadWrite, and it works. But I checked it by Sdfat-adafruit fork -> open-next it doesn't work.
Another point is I test QT py m0 by example program tinyusb msc_sd, the removable device opened, and I can open my files on it. But all options are not working. For instance, I can't copy a file into it.
All examples tinyusb msc work on seeeduino xiao perfectly but do not work on QT py m0. last point, tinyusb version 0.10.5 doesn't compile on QT py m0.
thanks in advance.
@hathach I sent you a mail about IAR.
Describe the PR
Fix:
Warning[Pe188]: enumerated type mixed with another type dwc2_stm32.h 125
Warning[Pa082]: undefined behavior: the order of volatile accesses is undefined in this statement dcd_dwc2.c 532
Warning[Pa082]: undefined behavior: the order of volatile accesses is undefined in this statement dcd_dwc2.c 1221
Operating System
Linux
Board
rp2040 PICO from RP
Firmware
//Modified midi_test example from Adafruit
//Added callback for handling clock ticks
//Output 1 byte sysex every 40 ms
/*********************************************************************
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
MIT license, check LICENSE for more information
Copyright (...
Oops, looks like the html test code didn't fully copy. Here is the full script for testing.
Here is the html script as a txt file. Rename it from test1.txt to test1.html (hope that works)
test1.txt
Hello guys, I was wondering if with this uvc features, could a pico 2040 connect to a webcam and stream via web?
[hathach/tinyusb] New branch created: ch32v307
[hathach/tinyusb] New branch created: ch32v307
[hathach/tinyusb] New comment on issue #1488: RP2040 host msc example non\-functional \(with fatfs\)
@pete-pjb thank you for your good will, though each port is different. rp2040 host does not support Bulk endpoints previously, which is the main reason for this issue.
Anyway, I think this issue is resolved and can now be closed. OP feel free to comment/re-open this if host/msc_file_explorer does not work for you.
special thanks to @gregdavill for this brilliant PR and others joining this discussio, and sorry for my huge delay in reviewing and testing this. I struggled a bit with openocd on linux, but finally got everything running. (also put some doc to the family.mk for building it). USB highspeed work well with cdc and msc (hid example has some hiccups but we will fix it later on).
CH32V307 is really an interesting mcu with dual usb controllers, one of which is highspeed, and bundle lots of other...
Thanks @hathach! I think I might have found/fixed some of those issues.. I know I hit some issues trying to use multiple IN/OUT endpoints, after some adjustments to the endpoint handling code it was working nicely on a local project branch.
So I'll sync those changes and take a look at merging them in.
It's been a bit of time since I did the initial work, but supporting the FS PHY I think should be easy, since it's similar/the same as the STM's one.
Thanks @hathach! I think I might have found/fixed some of those issues.. I know I hit some issues trying to use multiple IN/OUT endpoints, after some adjustments to the endpoint handling code it was working nicely on a local project branch. So I'll sync those changes and take a look at merging them in.
That is great to hear, I wished I could have more time to looked into ch32v307 dcd code and do more testing with other class drivers as well.
It's been a bit of time since I did the ...
Operating System
Linux
Board
Teensy 4.0
Firmware
examples/dual/host_hid_to_device_cdc
What happened ?
I'm using a Teensy 4.0 with a USB port soldered to the host pads. The example works if I first connect the Teensy to a computer and then plug a mouse to the host port on the Teensy. But if I plug a mouse to the Teensy first and then connect the Teensy to a computer, it doesn't work.
With the change below applied, it works. (I'm not saying this is the proper fix, just...
Operating System
Linux
Board
Teensy 4.0
Firmware
examples/dual/host_hid_to_device_cdc
What happened ?
I'm using a Teensy 4.0 board with a USB port soldered to the host pads. Plugging in a mouse and then unplugging it causes the board to crash (failing assert in usbh.c:481). If I comment out the assert, everything seems to work OK (I can plug the device back and it works).
How to reproduce ?
- Flash a Teensy 4.0 board with the host_hid_to_device_cdc example.
- P...
thanks for reporting the issue, look like the usb transfer is complete -> device is unplugged --> usbh_task() is called and it asserts since it couldn't find the owner of the usb transfer (is unplugged now). Can you add the following log right above the assert and paste the log output here. I will pull out hardware and do more test later on.
// no driver/callback responsible for this transfer
TU_LOG2_INT(tuh_mounted(event.dev_addr));
...Here's what it says when I add that log and unplug:
regs->portsc = 1D00100A
Current Connect Status: 0
Connect Status Change : 1
Port Enabled : 0
Port Enabled Change : 1
Port Reset : 0
Port Power : 1
[1:0:0] USBH DEVICE REMOVED
Address = 1
HID close
HUB close
on EP 81 with 0 bytes
tuh_mounted(event.dev_addr) = 0
tuh_task_ext 482: ASSERT FAILED
thanks that confirm my suspect, I will pull out my hw and fix it later when possible.
Describe the PR
Introduces a new function tu_memcpy_s, which is effectively a backport of memcpy_s. The change also refactors calls to memcpy over to the more secure tu_memcpy_s.
@silvergasp thank you very much, tinyusb is accepted to oss-fuzz. Though strangely, I would expect an notification email from oss-fuzz but received none so far. Also the document said we could check build status after 1 day or so, but couldn't find it https://oss-fuzz-build-logs.storage.googleapis.com/index.html .
There is no rush, I just wonder if there is anything we should do or just simply wait for a few more days for it to get run.
please make an PR for this if possible, thanks.
Describe the PR
mute and volume arrays in main.c have wrong number of elements (2 instead of 3) because CFG_TUD_AUDIO_FUNC_1_N_CHANNELS_TX was used to calculate array lengths. CFG_TUD_AUDIO_FUNC_1_N_CHANNELS_TX changed to CFG_TUD_AUDIO_FUNC_1_N_CHANNELS_RX.
Additional context
Changing the volume of second channel ends up soft brick of device in my case because OS will remember last volume control.
The NXP frdm_k32l2b BSP, as currently shipped with TinyUSB no longer build due to changes in the upstream NXP IDE and SDK.
The start up file and linker files currently referenced in board.mk no longer exist, making it impossible to build the BSP.
This PR modifies board.mk to reference the current NXP IDE and SDK files.
It also adds a README file to explain which files are needed from the SDK and how to set up the build using them.
Yeah, I actually think this is an upstream bug in oss fuzz. It turns out that many new projects are not working properly. There is a similar tracking issue here;
https://github.com/google/oss-fuzz/issues/9408
While the name of the issue is not descriptive of tinyusb it appears to be an identical problem.
Related area
Security
Hardware specification
N/A
Is your feature request related to a problem?
Beyond compiler warnings/errors tinyusb doesn't currently leverage static analysis to prevent bugs.
Describe the solution you'd like
I'd like to propose integrating clang-tidy into the continuous integration workflow. It's worth noting that clang-tidy is also capable of many other things statically like;
- Identifying bugprone codi...
Related area
DCD, ISO
Hardware specification
All
Is your feature request related to a problem?
Currently all transfer events go thorough the event queue and processed in tud_task()
https://github.com/hathach/tinyusb/blob/fa9d19027be7caa8dda2ab81ce8fda8b7f586a58/src/device/usbd.c#L534
While it's ok for most situations the timing could be hard to achieve for ISO transfer, like High Speed UAC class only has 125us to process each transfer.
A bad example would be UAC+MSC ...
Add support NXP FRDM-K32L2A4S evaluation board.
The K32L2A4S uses a different core, and in some cases different I/O configuration registers, than the existing FRDM-K32L2B3 evaluation board port.
Superb, I have tried a couple of static analyzer before, but didn't got anywhere. This look great, if you could make an PR for this, I am happy to review. Otherwise, I will try to wrap my head around this later on. The more checks we run, the better :)
have you tried init nxp submodule either with git command or make BOARD=yourboard get-deps ? if not please try it first
Most if not all of the board.mk modification should be reverted.
we should only need to init the submodule for nxp hw/mcu/nxp/mcux-sdk
thank you for your PR. The K32L2AXX is similar to K32L2BXX, that we could merge them together as K32L2 family. If you are not familiar, just simply use the K32L2BXX for this new board. I will make a rename later on.
PS: BSP need to use the git submodule nxp mcux as mentioned in the review of #1854
Yeah clang-tidy is a nice easy one to use. In fact, I've already run it on tinyusb. Just go a bit of cleanup to do before a PR. Though I do have a question. Is there a way to build all of the source code under /src minus all the ports, in one make invocation? I've been using bear (a command line tool) to generate a compile-commands.json file which is used for clang-tidy but also clangd, but I need to be able to build all of tinyusb in one make invocat...
Operating System
Linux
Board
ESP32-S3
Firmware
hid_generic_inout
What happened ?
The comment at https://github.com/hathach/tinyusb/blob/master/examples/device/hid_generic_inout/src/usb_descriptors.c#L106
is slightly misleading. It should be EP Out & In address instead of the other way around.
How to reproduce ?
Refer to the SRC
Debug Log as txt file
No response
Screenshots
No response
I have checked existing issues, dicussion and documentat...
what would be the issue you having, is it due to SYMBOL check e.g CFG_TUD_CDC that opt-out the code. We can add tusb_config.h or CFLAGS to enable all the feature. For the backend e.g dcd_*, we can use the port/template one, which is basically an stub for backend APIs.
I am not familiar with clang-tidy, though if you share your working, maybe I could help it out (not entirely sure though).
I will take a look at the submodules. I was unaware of their use here.
While the two FRDM boards are similar, their cores, memory map and power management are different.
The B series is aimed at communication apps with dual core M4/M0+ while the A series is for security and has only single M0+ core. The B series is similar to most Kineits parts with SIM_OPTS etc. The A series is its own thing with Peripheral Clock Control (PCC) etc.
To unify the code how do I tell which board is be...
Hmm I think the port/template that you mentioned, is the missing piece I was looking for. I'll try and use that backend for static analysis, and see where that gets me.
I will close this pull request and continue in #1858 where we are discussing merging the 2A and 2B families.
Describe the PR
The RP2040 cmake script hardcoded TUSB_OS, make it configurable when using other OS like FreeRTOS
Additional context
The change will default to OPT_OS_PICO to keep back compatiblity
thank you. IAR seems to be even more picky than gcc
thank you @silvergasp , seems like they fix the issue already. tinyusb build log can be found at https://oss-fuzz-build-logs.storage.googleapis.com/index.html#tinyusb
My idea is add an ep type mapping inside _usbd_dev, which updates on tud_edpt_open(). In dcd_event_handler() it will decide whether or not adding to event queue based on ep type.
@hathach what's your thought ?
Yeah, it's looking like things are on track again. I don't think the fuzzer's have been run yet, but I'll check again tomorrow to see what's going on. We should be able to see some statistics once it's been run here;
https://oss-fuzz.com/fuzzer-stats?project=tinyusb&fuzzer=afl&job=afl_asan_tinyusb&group_by=by-fuzzer
You'll need to log in with your tinyusb.org@gmail.com email account to get access to that dashboard.
Looks like it's running well. I've got a little bit of tweaking to get it working well with the AFL fuzzing engine. But other than that I'm super impressed that it hasn't found any new bugs. Its already done more than 1000x the iterations than i ever did on my laptop. Their servers are a lot quicker. You've done well writing tinyusb to be so robust against fuzzing!
ah thanks, the dashboard starts to show some interesting statistic, though to be honest, I don't know these well enough.
Looks like it's running well. I've got a little bit of tweaking to get it working well with the AFL fuzzing engine. But other than that I'm super impressed that it hasn't found any new bugs. Its already done more than 1000x the iterations than i ever did on my laptop. Their servers are a lot quicker. You've done well writing tinyusb to be so robust against fuzzing!
...
Not a problem :)
Well here's a more verbose rundown. There are multiple sanitizers (you can think of these as bug detectors). The ones that we have enabled with OSS-fuzz are;
- Address sanitizer (ASAN), which among other things will detect buffer overflows.
- Memory sanitizer (MSAN), which among other things will detect usage of uninitialised memory.
- Undefined behaviour sanitizer (UBSAN), which will detect undefined behaviour e.g. an integer overflow.
Then we've got multiple fuzzin...
thank you very much for the very detail explanation. Things are much clearer to me now. TU_STATIC look good, we can then wrap all variable into a struct to make it easier to add TU_STATIC. I definitely need to learn more about fuzzing in the future.
This allows transferring data IN from a const buffer without compiler warnings.
Also changed several uses of tud_control_xfer on const data to use tud_control_xfer_in instead, eliminating ugly casts. Did not change all uses - only the ones that were clearly acting on const data and had ugly casts that could be eliminated.
A more aggressive approach would be to modify all calls in the IN direction to use the new function.
An even more aggressive approach would be to modify all `tud...
Unfortunately, I can't say I've tested this on the current master branch.
I have tested it in my project based on 0.12.0.
thank you for adding the guard, I think we should move the variable to hw_endpoint array, since the tinyusb stack only submit 1 transfer per endpoint at a time. This will remove the need to run critical section which is an rather expensive function.
[hathach/tinyusb] Pull request review submitted: #1779 rp2040: avoid device\-mode state machine hang
sorry for late response again, the Lunar New Year aka TET in my country forcing me to clean my house/desk and leave not much time for the work. I don't think I will have time to test this out on actual RPI4 in another couple of weeks, and this has been on pending for too long (my bad). If you could update the PR
- to move the parked_ep into hw_endpoint array without the use of critical_section
- comment out/revert the hw_endpoint_lock_update() implementation since there is other places tha...
Add support for NXP's mimxrt1024_evk evaluation board.
Tested AOK with device\cdc_msc_freertos example.
made a git mistake; will try again in a minute...
Add support for NXP's mimxrt1024_evk evaluation board.
Tested AOK with device\cdc_msc_freertos example.