#help-with-arduino
1 messages · Page 101 of 1
Vout = Vin * R2/(R1+R2)
Vout is 3.3V, Vin is 230V, R2 is 100ohm
That gives us
3.3V = 230V * 100/(R1+100)
Just solve for R1
What are you trying to accomplish?
But I’d just use a transformer
Like a 46:1 transformer with a full bridge rectifier and a 3.3V DC to DC converter to take the 5VDC out of the transformer to make 3.3V
If I was designing a power supply of course
Many simple power supplies use a lashup known as a "capacitive dropper" to reduce mains voltage to something that can power things like LEDs. It's more efficient than a resistive dropper. However, both capacitive and resistive droppers are "non-isolated", which means that anything connected to them is also connected to mains voltage: this should only be done in apparatus that cannot be touched while it is energized. These techniques also only work well in situations where the load is known and doesn't vary much, as the amount of voltage they drop depends on the amount of power consumed: consume less power and the voltage goes up. A transformer is safer for you (it provides isolation, avoiding shocks and fires) and safer for your equipment (its voltage drop does not vary nearly as much with changes in load current).
If you want to power 3.3v electronics from 230v AC, then no, resistors are not the way to do it. If you only need a relatively low current (say, just to power an arduino), an easy and cheap solution would be to get a USB charger (from 220-230V AC) which gives you 5V DC, and then add a 3.3v voltage regulator
Might also be able to find a 3.3v power adapter, although I haven’t seen many
5V adapter with a 3.3V LDO is a great option
230 VAC isn't hobby-level working environment.
Generally you buy things that plug into that, and, ideally, have been approved for safety.
(UL rated stuff is becoming harder to find!)
30 volts is considered the electrocution hazard threshold. (<30V not usually a problem)
i think the question comes down to should you, because you certainly can but you probably shouldn't
We moved when I was not yet six years old and I'd already been electrocuted by then - unplugged a fish tank at a neighbor's. ;)
After the first one I instantly recognized the feeling when I got the second one (quite a few years later).
Cement floor basement, outlet wired incorrectly (I did nothing wrong/unexpected).
whoops lol
Several times on outdoor stages I've seen musicians touch a metal microphone/stand and let out a light yelp. ;)
If I was the <gov't> I'd go into stores and pull goods off the shelf that are not UL rated, and let the industry respond to that pressure.
It's ridiculous that there's no enforcement anymore.
No UL mark on this one (I bought mine through DigiKey):
https://www.sra-solder.com/korad-kd3005d-precision-variable-adjustable-30v-5a-dc-linear-power-supply-digital-regulated-lab-grade
FWIW it's built well and would 'probably pass' a UL cert program, unmodified.
Does have a CE mark iirc. /thread
While UL is federally approved to perform safety testing, it is not a government entity, so requiring UL certification on every product in distribution is probably not enforceable. I would certainly hope every product has some official safety testing done, but UL is a private for-profit organization that certainly does not have to be the exclusive mark of safety on consumer goods.
Main reason UL isn't as common as it used to be: They transitioned to a for-profit organization in 2012.
CE is probably more common for consumer products, since it is legally required for most consumer electronics to be distributed in Europe?
@livid osprey The rub I'm getting is that business practices were relied on in lieu of enforcement - it was always related to national fire codes.
Right the CE mark in Europe - but it doesn't guarantee a whole lot.
(see also #general-chat)
UL is usually required if the item has a mains voltage attached power supply, it is there to try to make sure you are not liable to get zap by mains voltage due to bad design. CE is for electronics to built to a country specifications, a FCC is US for the device transmits something and could potentially interfere. RoHS is so kids don't lick them for the lead since it's supposed to be built without lead and other more toxic materials.
We had to go through all the testing and such for some devices we wanted built here at where I work
We got real familiar with the process
Hey, everyone. I'm trying to fit an M4 Express and Prop-Maker FeatherWing into a 1" pvc pipe. This small space prevents me from powering them via the M4's JST port with my 3.7v 2200mAh battery. I've considered soldering a micro-usb cable to the end of the battery's cables and using that port instead, popping the JST port off the board and soldering my own longer cables to the pins left behind, and directly soldering the battery to the board itself. All of those seem like I'm asking for trouble. Any suggestions?
Relevant power management docs page: https://learn.adafruit.com/adafruit-feather-m4-express-atsamd51/power-management#alternative-power-options-3016710-14
I think those are all reasonable approaches. I'd probably lean toward using the micro-USB, since a) it's already there, and b) you can unplug it easily, but tack soldering wires to the JST connector pads would make sense too.
If I went with the micro-usb approach, does it matter that the board would expect 5v and the battery would only output 3.7v? I’m guessing the board’s voltage regulator would sort it out but I want to make sure
Hmm, good point: it might work, but I'm not sure.
Ok, I’ll look for that answer and do the JST approach if not. Thanks for the help!
Hi all. Having some trouble getting this Adafruit SD card breakout working. I've tried it with the metro m4 in the attached picture and an old mega 2560. I tried two different SD cards formatted fat16 and 32. I've been using the Card info Arduino sketch. I set the chipselect pin to 10 I'm not sure what else could be keeping the card from being recognized.

It's not immediately obvious to me that pins 11-13 are the correct hardware SPI choices on the Metro M4. You might need to use the ones on the six-pin header at the bottom of the board, or otherwise double-check what peripherals the GPIOs are getting assigned to.
Okay that's a good idea. I had done some looking around for a detailed pinout for the M4. I'm not sure if one exists yet, I couldn't find it in the learn documentation. I'll update once I try the six-pin header. Thanks for the quick response 😄
After some rewiring and trouble shooting the SD card is showing up! Thank you for your help the six-pin worked great 🙂
i am little bit scared... what is this...?

Incorrect baud rate usually
It's way less scary than it looks
Oh wait
Hmm, I'd check baud rate for sure but it could be something else
question for the arduino + compiler pros here : I have custom arduino core for the SAMD51 (M4F) for a board that would be similar to the itsybitsy M4 for some of it. I'm currently on gcc 2017 and previously migrated the toolchain from 2014, also upgraded CMSIS to the latest adafruit version
now using the 2019 gcc is attractive because I'm still saving 3% of flash but "nothing works". I have huge issues to boot the board, large incoherence in just accessing an array of uint32_t, returning crazy values. My SD card driver (custom) works and the board now boots after fixing a couple of SPI related issues but I'm wondering if the move to 2019 required other complicated things in the core, ld script (checked, no difference...) or code ?
Does anyone else have issues with trying to connect to an arduino?
I got an adafruit metro and I am trying to just connect to it but no luck.
One problem that comes up semi-often is people accidentally using a charger-only USB cable instead of one with the full data-connection wiring.
I use this cable to connect to my portable scanner and headset so I think it is a full data connection
Cool. Does the board show up as a USB device in your OS device manager?
When I plug it in it causes the device manager to refresh but it doesn't show it under ports
The JST port is probably the better way to go; you can desolder the board connector and solder one of these in its place: https://www.adafruit.com/product/3814

For a really long time we assumed that the JST PH didn't have a free-hanging male header version. But then we found this JST-PH 2-pin Male Cable, and we were like, this is perfect! ...
Just make sure you triple check the polarity before you connect your battery haha
I actually just finished popping that port off and repurposing it into a connector like that. It all works but I’ll be ordering one of those soon
Figured it out. Didn't have the drivers installed
@cedar mountain any idea what board I am suppose to use? A guide online said SAMD but I do not see the metro
I'm not familiar with that config off the top of my head, I'm afraid. Possibly the guide is telling you to use a similar board using the same microcontroller chip, if the Metro isn't explicitly listed.
Yeah I wish I could just search it on the board manager but sadly that is not the case
sigh I needed to do the more board url thing
Im trying to power a mosfet using my arduino uno r3(At high frequencies) I found a frequency library that works great, but it only outputs 2.4v when I need atleast 4 to toggle the mosfet gate
The Uno R3 should output nearly 5V.
You can, of course, build (or buy) a gate driver
it is 5v when im not using the frequency changer code, but when I do it changes to 2.5
if you output a 50% duty cycle pwm signal on a 5v pin, and measure the result using voltmeter, it will show about 2.5v
in reality voltage oscillates between 0 and 5v, but too fast for a voltmeter to react to it
Im oscillating at 60hz, use the voltmeter(ac) and it still measures 2.5, if I oscillate at 1hz and check it(with dc meter) it shows 2.5
I also know that its not actually going from 0-5v because I had the mosfet working without the frequency changer code, but when added it doesnt work
there is no way, as far as i know, of actually changing the voltage of output pins on Uno (assuming power supply provides enough current to feed it). All you can do in code - wharever library you use - is have the voltage switch between 0 and 5v
so i would suspect somethingis wrong with the wayyou measure it
fixed it lol
pinMode()?
I need some general help right now, then more specifics later. Here is the long and short of what I would like to accomplish. I would like a raspberry pi to wirelessly control multiple Arduinos. These Arduinos will be controlling light strips. Basically, one Raspberry Pi master, multiple Arduino (or other microcontroller capable of doing this) slaves. I would then like to be able to create a GUI on the Raspberry Pi to control the lights (via the slaves), and maybe even control the lights from my phone?? Does this system I have described even sound possible?
Sure, set up ESP32 or ESP32-s2 microcontrollers with a web server on each with path based commands
Then have the raspberry pi navigate to each ESP32’s address/path combo to send those web commands
Also, for the sake of more inclusive terminology with your setup, try to use Main/Secondary or even primary and secondary. There is a push to move away from using master/slave in technical contexts
Anyway, let me see if I can find a good guide on the Adafruit learning site
Hmmm… I actually always did wonder how we were allowed to use master/slave anymore with today’s political movements. Okay, I will watch out for this in the future. That is just what I learned in college and am used to calling them, so forgive me if I forget and use it.
In response to what you said, I’m interpreting that is I would need to have the program contact each individual microcontroller separately and send the command? No general “mass command” that any secondaries on that “frequency” would pick up and apply, similar to an infared setup?
You could probably query the network in mass for 200 responses for <>.<>.<>.<>/path
Could you find me any guides or examples where a main/secondary wireless setup using these chips was done that I could reference?
Not yet. You might look at whippersnapper as an option
Let me find that learn guide
@dull fjord take a look at this: https://learn.adafruit.com/quickstart-adafruit-io-wippersnapper

Adafruit Learning System
New to Adafruit IO WipperSnapper? Start here.
It would remove the Raspberry Pi aspect and provide a nice interface
Plus no code 🙂
Or minimal at least
I’m not sure how you could do multiple on one instance but perhaps there is a way to control each instance with one dashboard
But wouldn’t this limit me in how much I could have the secondaries (I.e. lights) have custom interaction with a program I develop? For example, I have an alarm clock programmed on my raspberry Pi, and I want the lights to slowly turn on before the alarm goes off. Would I still be able to do this with this type of control?
Oh I see, perhaps there is a way to manage that. I’m not entirely sure though.
So you could connect your wireless devices to Adafruit IO and send commands to your connected Adafruit IO devices

Adafruit Learning System
Want to connect your project to the Internet? Start Here!
what flash does the macropad have? trying to determine write cycles
it's in the 100 000
that's plenty for basic settings, thanks!
won't even bother wear leveling, praise be laziness
GD25x16? x being a wildcard.
https://learn.adafruit.com/assets/103270
both are min 100k
they might switch chips due to availability, but as far as I know they target 100k min
Anyone know of an alternative to this?
Looking for a header pin/DuPont power bus..

looks pretty simple. how important is that form factor?
The smaller the better. I could always just cut out some strip board or something I guess
Might also make a design & get some printed - I could see myself using them in a few applications where I need to power different sensors
Can someone help me with the arduino uno connecting to the Bluefruit? This is how I have it connected but I’m using the Bluefruit UART LE friends and everything online is with the SPI. I’m using the only library you can find and I think I have it wired wrong and the code won’t factory reset
@sage raven if cutting up something existing is an option, checkout the various perma-proto boards:
https://www.adafruit.com/category/124
could cut out their power rails and the solder on headers
@lyric seal which bluefruit product are you working with?
is it this one?
https://www.adafruit.com/product/2479
Hello! Noob alert! I have made a setup with one arduino which controls a 5v fan and a digital ledstrip. I want the fan to go on/off with programmed intervals and at the same time I want the leds to fade on and off. I wrote a code but now they work one after the other (first the led fades in and out one time and after the the fan goes on and of one time and then the led again) instead at the same time. I can't figure out how to fix it. Here also the beginning of the script. Can someone give me a hint how to fix it?

Currently, the way your code is structured to run the entirety of RGBLoop() before proceeding to ventilator(). If you wish to concurrently control your LEDs and fan, you'll have to restructure your code to update your LEDs (showStrip()) and whatever controls your fan once per loop() execution. If you use global variables, you can free your code from the for-loop and increment/decrement your LEDs as you adjust your fans.
int brightness = 20;
int ledState = 0;
bool direction = false;
void loop() {
switch(ledState) {
case 0:
if(direction){
brightness--;
if (brightness <= 20){
direction = false;
}
}
else{
brightness++;
if (brightness >= 255){
direction = true;
}
setAll(0,0,k)
break;
}
showStrip();
// insert fan code here?
delay(10);
}```No idea what your fans are doing, I just randomly spun up some code based on your current LED function.

I just provided a starting point for you to revise your code, because I was worried my phrasing of things would be more confusing than some sample code. I'm sure you can take a shot at rewriting the rest of your code based on what I showed you.
yess thank you I gonna give it a try!
thanks for your help @leaden walrus
ended up finding the same product in stock at amazon https://www.amazon.com/dp/B08G1D97YY/ref=cm_sw_r_cp_api_glt_fabc_M4JZ92XH335K4AB6TTC0

10pcs Dupont Terminal Block 25p Needle Male Splitter pin Header 2.54 DIY Electronic Building Blocks
awesome little porto boards from adafruit though! keeping those in mind for future projects
If you're just doing 3-dimensional impulse detection, directional resolution would be a function of both refresh rate and separation distance. With speed of sound at 343 m/s, and an arduino analog input having a refresh rate of around 9600Hz for a 328p (Uno), you're looking at a separation distance of at minimum 343/9600-36mm for a minimally functional directional detection.
If we were to go a step further and try to recognize the direction of a particular sound or multiple sounds, you're probably going to need to compare frequency spectrums, at which point you're going to be limited by your significantly lower FFT sampling rate. I don't even know if Arduino is capable of FFT processing, but it'll likely require hundreds of times more separation distance for a hobbyist system to perform directional audio filtering by parallax...
Agreed, I'd aim for an Arduino-compatible Cortex M4 board with the DSP and floating-point processor rather than trying to do this with a low-end 8-bit Arduino.
The exact board probably won't matter a ton, as this is mostly an audio-circuitry and software problem, but the Feather M4 Express should be a good default choice: https://www.adafruit.com/product/3857

It's what you've been waiting for, the Feather M4 Express featuring ATSAMD51. This Feather is fast like a swift, smart like an owl, strong like a ox-bird (it's half ox, half ...
Only vaguely. Almost any MCU should be able to run the ADC fast enough to keep up with an audio signal. The reason you need a fast CPU is for all the data-processing after that.
Correct. You'd also only have enough RAM to store a small fraction of a second of audio data at a time on an Uno.
You can choose other available boards. You would probably want to look for a Cortex M4 or M7 processor.
It's much better than an Uno, but the Due uses a Cortex M3, so it doesn't have floating-point or DSP instructions.
That's an excellent option, yeah.
Good luck!
Hi! I am trying to adapt a pybadge(adafruit) sketch to a esp32 in ARDUINO IDE. The problem is the Arcada library. At some point it uses arcada.timerCallback(...). How can I use something else that works the same for esp32??
Thank you by the way...!
Does anyone know how I would be able to connect a Bluefruit LE UART friend and a MPU 6050 sensor so that the MPU 6050 sensor would send its data to the bluefruit and then to my phone? Everything is currently running just through the Arduino but I'm not sure if because how its wired right now is the reason that the bluefruit will not recognise the data. I have a breadboard available to wire the sensors through but I'm just not sure where to start?

ble uart friend is supposed to connect to a microcontroller and communicate over serial; mpu6050 communicates with the mcu over i2c, acting as an i2c slave. I am afraid there is no way to avoid having an mcu between them
but you can replace ble friend and arduino by a single device, a ble-capable microcontroller such as itsybitsy nRF52840
Sorry super new to coding, what is an example of an mcu I could use?
as I said, ItsyBitsy nRF52840 would work well

What's smaller than a Feather but larger than a Trinket? It's an Adafruit ItsyBitsy nRF52840 Express featuring the Nordic nRF52840 Bluetooth LE processor! Teensy & powerful, ...
Hello all, can anyone confirm if the Adafruit 1.8" with joystick shields work with Arduino Due (V3.3) boards? I am reading that there are logic level converter on the Adafruit and see conflicting info about whether it should be compatible on the Adafruit site (incompatible libraries potentially). Any help is appreciated.
I mean, there is an Arduino Uno already wired, so the issue here isn't an issue of a lack of MCU. I checked the datasheets and both devices are 5V-safe, so there shouldn't be any compatibility issues there. I don't see any power wiring, though, so you probably need to wire from the 5V + GND pins to your breadboard, and power Vcc pins that way.
GPIO pins aren't capable of much current, so you shouldn't use them for supplying power to more than an LED or two.
@livid osprey Both devices are connected to the Arduino and working as they should be. I'm just not sure at this point wether they are compatible with eachother? I'm also not totally sure what power wiring is?
Unfortnuately I have to use what is already given to me 😦
Bluefruit, if I recall correctly, should just be sending data over UART, so there should be no issues with hardware. Power wiring is just the wires that connect Arduino 5V to device Vcc and Arduino GND to device GND.
I have the MPU 6050 connected to 3.3Volts because thats the volt number it has on the sensor, and same deal with the Bluefruit its connected to the 5V. would I still need to wire it to the breadboard?
Adafruit's MPU-6050 module? You need to connect 5V to the Vin pin, the 3Vo is a 3-volt output from the MPU module's voltage regulator. The reason you're not getting any data to your bluefruit is your Arduino isn't powering your MPU-6050 haha
I only recommended the breadboard because you have two 5V connections to the same pin. As long as they're connected, you can connect it however you feel comfortable.
ohh omg I'm so sorry I'm so code stupid. How would you connect the 5v to the breadboard?
Don't say that, everyone starts somewhere. Take a wire and connect the 5V pin on the arduino to the red (+) power rail down the side of your breadboard, then do the same with arduino GND and the black (-) rail. Then, any of the holes on the corresponding rails can be connected to your 5V and gnd pins for your other devices.
I am building code for a Feather M4 Express using arduino-cli. How do I make it use USB CDC for Serial.begin()?
I am guessing I have to add something to the arduino-cli compile command but I don't know what.
or maybe there's some other reason usb is not appearing
yeah there's some other problem. maybe USB and freertos are not compatible. hmph.
It looks like it should work. The only data being fed back to the Arduino Due is I2C from the seesaw chip, which is pulled up to IOREF for compatibility. There shouldn't be any major issues.
The V1 shield directional buttons is pulled to 3v3 on a single analog pin, so that should be fine too. It does look like the old board has a slightly different pin definition for the LCD though.
You're not stupid, you're just new! Everybody starts out not knowing a thing about this stuff. But you can learn just as much as everyone here in time!
Aw thanks @heavy star and @livid osprey . I think at this point my code is just royally screwed up, any chance yall are able to comine?? two codes together?
Not gonna lie, first thing I thought of when I saw "any chance yall are able to comine??" was me and Doc combining into a Power Rangers-esque giant mecha....
heh
I mean, if you post your code, we or someone else might be able to see what's wrong.
You can either upload the file directly, or copy/paste your code in a codeblock inside```arduino and ```.
Backtick is the button to the left of 1
3 backticks at the start and end of the code
Hey what’s the difference between Atmega328 and 328PB ?
One is Peanut, the other is Peanut Butter
Lol jk
One has additional i2c and SPI lines I believe
The 328PB that is
@low verge you might find this helpful
Thanks.
The mains features for me are the 10 PWM channels and 2 additional 16bits Timers
Also an additional UART
anyone here know how to use AVR C files/libraries in arduino
or use an arduino sketch in Atmel with some of your own AVR-C code in it
I have a project im working on that uses rotary encoders that I would rather program in C
but it isnt really feasible for me to use the encoders without the rotary encoders manufacturer's arduino code
Just put the C files in the same directory
You may need to include (or perhaps create) a header file that describes the entry points of the C code, and include that in your sketch.
That sounds right to me. Can you copy-paste the specific error you're getting?

I'm Out now on my phone,
Looks like you're probably missing an AVR include file. Do you have#include <avr/io.h>at the top of your file?
Has anyone had success driving > 1 NeoPixel strips on the QT Py RP2040? When I try to use 2, it seems that whichever one I call begin() on is the one that works, while the other one remains unlit. Simplest code to reproduce this:
#include <Adafruit_NeoPixel.h>
#define MAX_BRIGHTNESS 32
Adafruit_NeoPixel strip1(30, 24, NEO_GRB + NEO_KHZ800);
Adafruit_NeoPixel strip2(30, 25, NEO_GRB + NEO_KHZ800);
void setup() {
Serial.begin(115200);
strip1.begin();
strip1.setBrightness(MAX_BRIGHTNESS);
strip1.show();
strip2.begin();
strip2.setBrightness(MAX_BRIGHTNESS);
strip2.show();
}
void loop() {
strip1.fill(0xFFFFFF);
strip1.show();
strip2.fill(0xFFFFFF);
strip2.show();
delay(10);
}
It doesn't seem to matter which pins I choose
thanks for that tip[
but now im getting a new error
now I just keep getting uundefined reference for functions I definitly have



Interestingly, I can use the Adaruit_NeoPXL8 library to drive multiple strips on the QT Py RP2040, so for now that will work for me. It must be doing some magic that the vanilla Adafruit_NeoPixel library is not doing to enable multiple strips.
It looks like those declarations are inside the #ifndef, so they might not be getting seen by the compiler.
I'm not sure why you need the #ifndef at all. Normally that would be part of a library header, not your own user code. You might try just taking those macros out.
that is my h file
i have some functions I wrote in AVR that I want to use in the main ARduino code
@cedar mountain
Is it possible that USART_LIB_H_ is already being used by a standard library header? You might try changing the name slightly to be sure it's unique.
Is your header being included by your main source file?
yes

I'm not sure, then. Can you tell whether it's compiling your USART_lib source as part of the build?
honestly no
im seeing some stuff for using precompiled libraries in arduino
think im gouing to try that
I'm attempting to test an Adafruit NeoTrellis by connecting it to a Feather M4 Express on a breadboard, but I get no response of any kind from the NeoTrellis when the Feather is powered up. The Feather lights up, but the NeoTrellis does nothing.
I'm new to this. Is there something else I need to do first?
I'm wondering if there isn't adequate connection without solder between the Feather and the pins connecting to the breadboard.

At first blush I'd say you at least need to solder the pins to the feather
You're not getting a solid electrical connection so the behavior is generally undefined
And I'd consider housings for your jumper pins, exposed metal like that can lead to weird bugs if something is touching something it shouldn't.
Thank you. I plan to solder it together, but I wanted to make sure I wasn't missing something first.
Sure thing.
Your indentation looks funny, try taking out the indents in the lines following the define. If that doesn’t work, you can also indent the define and add an #endif after.
Oh the #endif is at the bottom… why do I always reply and then notice the important details…
@leaden walrus I'm trying to test a sketch on PyPortal Titano, and it's not even compiling to begin with, and the errors it's throwing are beyond my capabilities. When you're around next, if you can help, that would be greatly appreciated. Please ping me.
@pallid grail yo. pastey the errors?
Oi. Too many for Discord. Hold on, making a file.
Wait let me try one thing.
@leaden walrus Ok, I forgot to change the board to PyPortal Titano. Now there's only this: ```In file included from /Users/kattni/AdafruitDev/Arduino Sketches/libraries/WiFiNINA/src/WiFiStorage.h:23,
from /Users/kattni/AdafruitDev/Arduino Sketches/libraries/WiFiNINA/src/WiFi.h:38,
from /Users/kattni/AdafruitDev/Arduino Sketches/libraries/WiFiNINA/src/WiFiNINA.h:23,
from /Users/kattni/Downloads/PyPortal_ArduinoSelfTest/PyPortal_ArduinoSelfTest.ino:11:
/Users/kattni/AdafruitDev/Arduino Sketches/libraries/WiFiNINA/src/utility/wifi_drv.h:293:12: error: 'PinStatus' does not name a type
293 | static PinStatus digitalRead(uint8_t pin);
| ^~~~~~~~~
exit status 1
Error compiling for board Adafruit PyPortal M4 Titano (SAMD51).
Way better than it was, gah.
Still, not sure what to do with that.
is PyPortal_ArduinoSelfTest.ino in a repo somewhere?
Yes, getting link
Well, Learn link anyway https://learn.adafruit.com/adafruit-pyportal-titano/arduino-test

Oh right, there's the GitHub link https://github.com/adafruit/Adafruit_Learning_System_Guides/blob/main/PyPortal_ArduinoSelfTest/PyPortal_ArduinoSelfTest.ino

GitHub
Programs and scripts to display "inline" in Adafruit Learning System guides - Adafruit_Learning_System_Guides/PyPortal_ArduinoSelfTest.ino at main · adafruit/Adafruit_Learning_System_Guides
The complaint, which may be the issue here.... is that it's written for PyPortal, not PyPortal Titano.
I'm not sure what that means or what to do to fix it either.
But one step at a time.
I was verifying I had all the libs and the compile failed.
This is the whole guide feedback "The code for the Arduino Test section is not compatible with the PyPortal Titano! It's the code for the regular PyPortal!" So.... nothing helpful to me there other than the obvious potential issue.
hits same error for regular pyportal also
Ok, that's good at least
I guess, heh
I was about to say I guess I could swap boards and check. But you beat me to it.
it's a compile error, so can just change board in IDE and click check mark to test other boards. that's all i'm doing at this point too.
Hmm right
So it's a fail in a library? It's not even referring to anything in the code that I can find....
It's up to 1.8.13 now
I was going to ask how early to go, but I guess that issue nails that down.
1.8.2 worked.
Ok testing on Titano
still an open issue. so just need to wait till they fix.
solution for now is to just revert lib version.
HAve we told people to do that in guides before?
not really. only if it persists for a really long time.
Code seems to work.
On Titano. It doesn't cover the whole screen.
Maybe that's the complaint.
I don't care about that. The code runs.
could add a warning call out. but would need to remember to remove it later, etc.
Ugh.
That would fail.
No one has complained about that yet
so
Imma leave it.
At least we know if someone does complain?
warning about nina lib version
Yeah, I'm saying I wouldn't remember to check to remove it.
Sounds like an excellent plan.
Ok I did find one "issue"
the "Sound" button on the display for the Titano, shows up within a space that is obviously the space it would be on PyPortal, BUT.... the place to tap it on the Titano is as if it was placed properly on the Titano.
screen size thing could be done as repo issue maybe
yah. ok. so maybe the code example does have issues on titano.
you're demonstrating that right now?
That's the only issue I can find.
Yep.
I mean there's no Temp sensor, so the value is wrong, but that's neither here nor there. It's not an issue, it's just a limitation of the hardware. The only thing about this example that doesn't "work" is the button placement vs touch activation point.
seems worthy of an issue. the touch overlay stuff probably needs tweaking.
Yep, adding issue now
@leaden walrus Thanks for your help! Issue filed with an image for clarification.
np
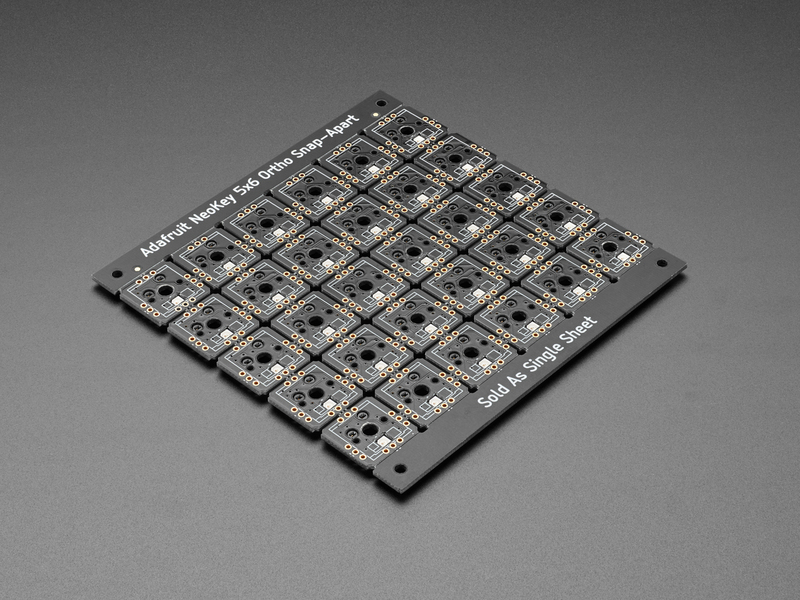
I would like to get Neokey working on my arduino as a keypad. Right now I dont even get the lights go up 😦 I dont know whats going wrong. Is there a Sketch for checking if all Neokeys are wired correctly? I wired 5 in a row. The SnapApart does not work
If you just want to check the neopixels, you should be able to use the lights as a single neopixel strip. I don't know of a prebuilt sample, but you can take the snippets of code from https://learn.adafruit.com/adafruit-neopixel-uberguide/arduino-library-use and see if you get any lights?
Alternatively, if you want to post your code, I or someone else might be able to point out any obvious errors.
Are you using the 5x6 snapapart or the 1x4 I2C Neokey?
Thank I do get lights show up if connecting out and ground but Never manage to get Thema in row light up. I tryed with pico and After much troubble i tryed with arduino but same
@livid osprey Thank you a lot for your help!
I have the5x6 and cut all of them because I Need 5x4 in special order

Maybe I did not wire correctly

It was a first try Never did this before.
Oh my. I don't know if I can follow that wiring...
🤪🤣 sorry
What do you mean by "special order?" The circuit layout for an orthogonal keyboard shouldn't matter since any kind of sequencing or keyboard output should be controlled in software.
Did you make sure all of the in pins are wired to out pins?
Also, make sure every key has one in and one out pin wired, and not two of either.

If I recall correctly, all of the in and out pins on the top and bottom are the same, but the ones on the left and right are different, depending on which row you took them from
Because it zig-zags, the keys from the 2nd and 4th row are actually the opposite of the other three rows.
Yes I connected the Outside out to in into next row following the arrows
If all the arrows follow your neopixel strip, you should be able to use them as a neopixel strip using the code snippets in the neopixel uberguide.
But don’t they have to be connected as a matrix?
Only for the keys. If you're just testing the lights, there's no matrix to worry about yet.
One step at a time haha
oh ok so Let me clearify for understanding please.
I have to connect what to what in Order to get the lights on for now?
Arduino___NeoKeys
5V -----> VIN
7 ------> first IN
GND ----> GND
Oh, they do have arduino sample code here: https://learn.adafruit.com/adafruit-neokey-5x6-ortho-snap-apart/arduino
Adafruit Learning System
The easiest way to create custom ortholinear key matrices!
You'll have to modify the definitions to match your setup though
Is there a Tessin for 7 as First in? Just asking. Will do its that way for Testing now
A what? Sorry, I'm not sure what you're asking
Oh, I took it from the sample code in the example above
You can change it to any pin you want
I don't even know which Arduino you're using anyways haha
Its a micro
So loading the sample onto micro and connect as you posted above should light them up?
The example tells Define rows and columns and I just have one row for testing
But eather way. No lights at all on matter what I do
You'll have to modify the row/col pin parameters and definitions for it to compile properly. The code is written for a feather RP2040, so some of the pins used don't exist on the Arduino micro.
You have VIN and GND connected?
Oh, the sample code only lights up when you have the key pressed
I only get light on if i connect ground and out
Also no funtcion if Pressing keys too
I am lost 😩
You can go to the setup() function and change the line lit[i] = false; in the for loop to lit[i] = true;
If you haven't connected the keyboard matrix, the keys won't do anything yet
Do you get any compile errors?
So the sample needs to get modifed more then just write the correct Pins for it?
Well, only if you didn't already connect your matrix
If you did, and you updated the pins accordingly, you should get lights...?
Oh, actually, there might be one more correction...
the line keynum = row * COLS + (5 - col); should be keynum = row * COLS + (COLS - col); i think
I connected my neokeys as shown in picture and made the Right pins. I did. not put keys an all of them for testing. And i did. not change anything with keys in that code. I only will use 20 keys and not 30
Yeah, you absolutely need to change the ROWS and COLS definitions, as well as the rowPins and colPins
Other than that, as long as the code compiles, you should be able to get SOMETHING...?
No Problems with that but no lights
All i would like to have for now is to check if they can just light up all at the Same time to check if wiring is correct
But the code could be the wrong for it or not?
The example code i mean
try File > Examples > Adafruit NeoPixel > simple for a simpler neopixel sample code
Just update the PIN and NUMPIXELS definitions.

Are all of the RED wires connected to VIN? I thought VIN was the hole on the left on the top side.
Well all of them are connected to another Pin on the Arduino Right now
I don't think the other pins drive enough current to power a neopixel.
The right one is defined in the Code
Correction, they can, but they probably shouldn't be used that way.
The other not
Did you connect the VIN pins? They're the only ones that matter for lights.
Yeah think I should
Well, not the only one, I should rephrase.
If you don't connect VIN to the arduino's 5V pin, you won't get any light
I could connect vin from other neokeys to vin from First Pin and all should light up
As long as they all tie back to the Arduino's 5V, you should get some light.
And yes they do of corse but that is not the way it showed in the tutorial with the neokey 5x6 ortho
Yes, because they wired it assuming you didn't snap the board apart yet haha
If you snap it apart, you have to make the other connections.
I thought that too but:
The VINs are connected internally in the board's snaps, but without them, you have to connect them all together yourself
Yes i did. with the ones underneath in the rows
But the ones on top go into different pins in Arduino
Oh
There is no VIN pin on the sides.
You should connect the GND pins together, that is correct
And Made row in and gnd
But you need to make sure you have all the pins you need haha
Ok so they all had no power
🙈
And that little thing Made me kill 2 Picos and wasted hard time of my life haha
Alright, I gotta go prepare for a meeting
Hope the rest goes smoothly now haha
Hope too thanks a lot
Ok. I still dont get it to work. No matter what I do. Maybe I soldert to much by now and damaged some of the Neokeys. But I dont want to give up. Therefor I would need a little help of how to wire up this matrix. I made a little matrix and maybe someone has a little time to show me, what pins need to be connected in correct way. That would be very helpfull for me to find out my mistakes.

I only can get the first one light up. No other. No matter if I connect them or not. No matter if using a new one or connect other ways... I am really lost with that . just connecting the Vin to each other did not help eather
Believe this should be correct.

I will Check that later. Thank you very much
@lean prism Be careful of the direction of the arrows. For the keys with the arrows as pictured, the purple lines should actually look like this:

Not all of the keys have the same direction, so if you're really not confident you can also just avoid using the let and right side data lines entirely.

Thankfully, the top and bottom connections are consistent throughout.
Ok just go for in and out like another snake
The vin any Suggestion of get them nicely together too?
Both of the VIN connections on each key are on the same bus, so technically you could simply ensure that all the VINs are connected to one another.
However, in practice, 5V neopixel strips see voltage drops further down in longer strips, so you may want to use thicker-gauge wire if you plan to just daisy-chain them all together across a single path.
For 20 keys, you can probably get away with 22/24AWG wire and a VIN to Arduino connection on both ends.
I forget how many pixels the recommendation is to reinject a voltage source for strips...
Oh ok 22/24 awg i Need to Google this
I ordered dupont wire Male to gemalt in Order to wire easier
Maybe now Not big enough
They will just not light up that much right?
Some keys might be a bit dimmer than others, but they should all light up regardless

ok
This picture just mirrored the 2 at the bottom so sure, the col and vin are other side
With only 20 keys, I don't think the voltage will drop enough to turn the lights off completely. If the last key is too dim, you can try connecting the last VIN back to the Arduino as well and see what happens then.
If you're using exclusively the top and bottom O and I connections, the arrows shouldn't matter to you anymore.
Cleaner wiring?
Not that the primary intent was to snap all the keys apart, but they included it for whomever's use case.
Though following the arrows can help shorten the wires a lot if you do zig-zag
Ok i understand i really Love this System its very Smart and Perfect for my use
It removes the need for the long wires at the end of each column
Hey guys! I'm running arduino on an esp32, it uses a Adafruit BNO055 sensor to send position data wirelessly over UPD. I'm hoping to figure out how to put the esp in to sleep mode when the IMU doesn't detect motion for X seconds. I'm not even sure where to start with this. Is it possible for the ESP to be "listening" for updated values while in sleep mode?
Not wirelessly, to my knowledge. Wake up sources from deep sleep are limited to a few options, including timer, touch, and external GPIO signals. The ULP coprocessor can also handle wake-up triggers, but all the wireless radios are disabled in sleep mode.
Oh, no I'm not hoping to send a sleep signal to it wirelessly
the BNO055 is wired directly to the ESP32
I just need to figure out how to set the BNO055 to wake the ESP32 over GPIO
I referenced this guide while I was playing with it, you can scroll through it to learn more about deep sleep and Arduino. https://randomnerdtutorials.com/esp32-deep-sleep-arduino-ide-wake-up-sources/
Complete guide for the ESP32 Deep Sleep mode with Arduino IDE and different wake up sources: timer wake up, touch wake up, and external wake up (with examples).
great! thanks
I am trying to do a project with the nRF52840 Feather board, but I can't compile even a simple test program. I updated the bootloader, deleted all old files and fresh installed the arduino IDE, tried different versions of the board library, but they all gave me different errors compiling. Here is the error I get on the latest version 1.1.0
```c:/users/evelyn/appdata/local/arduino15/packages/adafruit/tools/arm-none-eabi-gcc/9-2019q4/bin/../lib/gcc/arm-none-eabi/9.2.1/../../../../arm-none-eabi/bin/ld.exe: sketch\sketch_nov01a.ino.cpp.o: in function setup': C:\Users\Evelyn\Documents\Arduino\sketch_nov01a/sketch_nov01a.ino:16: undefined reference to Adafruit_USBD_CDC::begin(unsigned long)'
c:/users/evelyn/appdata/local/arduino15/packages/adafruit/tools/arm-none-eabi-gcc/9-2019q4/bin/../lib/gcc/arm-none-eabi/9.2.1/../../../../arm-none-eabi/bin/ld.exe: C:\Users\Evelyn\Documents\Arduino\sketch_nov01a/sketch_nov01a.ino:17: undefined reference to Adafruit_USBD_CDC::operator bool()' c:/users/evelyn/appdata/local/arduino15/packages/adafruit/tools/arm-none-eabi-gcc/9-2019q4/bin/../lib/gcc/arm-none-eabi/9.2.1/../../../../arm-none-eabi/bin/ld.exe: C:\Users\Evelyn\Documents\Arduino\sketch_nov01a/sketch_nov01a.ino:29: undefined reference to Serial'
c:/users/evelyn/appdata/local/arduino15/packages/adafruit/tools/arm-none-eabi-gcc/9-2019q4/bin/../lib/gcc/arm-none-eabi/9.2.1/../../../../arm-none-eabi/bin/ld.exe: sketch\sketch_nov01a.ino.cpp.o: in function loop': C:\Users\Evelyn\Documents\Arduino\sketch_nov01a/sketch_nov01a.ino:78: undefined reference to Serial'
collect2.exe: error: ld returned 1 exit status
exit status 1
Error compiling for board Adafruit Feather nRF52840 Express.
What code are you trying to upload?
not even uploading yet, just compiling. it's a simple keyboard matrix test program. heres setup()
void setup() {
Serial.begin(115200);
while ( !Serial ) delay(10); // for nrf52840 with native usb
for(int x=0; x<rowCount; x++) {
Serial.print(rows[x]); Serial.println(" as input");
pinMode(rows[x], INPUT);
}
for (int x=0; x<colCount; x++) {
Serial.print(cols[x]); Serial.println(" as input-pullup");
pinMode(cols[x], INPUT_PULLUP);
}
}
oh. i didn't know i needed to #include <bluefruit.h>
Haha, was about to ask you for your #include lines
yeah i didn't think i needed to include anything
Hopefully that fixes everything.
yep it uploaded just fine
it worked fine for a while, but now i can't upload.
when i try to upload after a normal boot (was working fine):
Failed to upgrade target. Error is: Serial port could not be opened on COM8. Reason: could not open port 'COM8': FileNotFoundError(2, 'The system cannot find the file specified.', None, 2)
Traceback (most recent call last):
File "dfu\dfu_transport_serial.py", line 113, in open
File "serial\serialwin32.py", line 33, in __init__
File "serial\serialutil.py", line 244, in __init__
File "serial\serialwin32.py", line 64, in open
serial.serialutil.SerialException: could not open port 'COM8': FileNotFoundError(2, 'The system cannot find the file specified.', None, 2)
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "__main__.py", line 296, in serial
File "dfu\dfu.py", line 235, in dfu_send_images
File "dfu\dfu.py", line 157, in _dfu_send_image
File "dfu\dfu_transport_serial.py", line 115, in open
nordicsemi.exceptions.NordicSemiException: Serial port could not be opened on COM8. Reason: could not open port 'COM8': FileNotFoundError(2, 'The system cannot find the file specified.', None, 2)
Possible causes:
- Selected Bootloader version does not match the one on Bluefruit device.
Please upgrade the Bootloader or select correct version in Tools->Bootloader.
- Baud rate must be 115200, Flow control must be off.
- Target is not in DFU mode. Ground DFU pin and RESET and release both to enter DFU mode.
when i try to upload in DFU mode:
at cc.arduino.packages.uploaders.SerialUploader.uploadUsingPreferences(SerialUploader.java:152)
at cc.arduino.UploaderUtils.upload(UploaderUtils.java:77)
at processing.app.SketchController.upload(SketchController.java:732)
at processing.app.SketchController.exportApplet(SketchController.java:703)
at processing.app.Editor$UploadHandler.run(Editor.java:2061)
at java.lang.Thread.run(Thread.java:748)
Caused by: processing.app.SerialException: Error touching serial port 'COM9'.
at processing.app.Serial.touchForCDCReset(Serial.java:107)
at cc.arduino.packages.uploaders.SerialUploader.uploadUsingPreferences(SerialUploader.java:136)
... 5 more
Caused by: jssc.SerialPortException: Port name - COM9; Method name - openPort(); Exception type - Port busy.
at jssc.SerialPort.openPort(SerialPort.java:164)
at processing.app.Serial.touchForCDCReset(Serial.java:101)
... 6 more
i had changed the baud rate in Serial.begin to 9600, would that have affected it? and if so, how can I fix this? can something so simple completely brick the board?
of course it randomly decides to work now
but i just keep getting that port busy message all the time
resetting sometimes fixes it
like i can't even open the serial monitor, it just says port busy
could something be still running that is using it, or could the port have changed ?
it was working okay 10 minutes ago. i would have to reset it once each time i uploaded to get the serial monitor up, but it was consistent with that. but now, it isn't working at all. i haven't opened any new programs since then, and i have had device manager open to check the port and it is correct
if its the wrong port it is a different error message than port busy anyway
the device boots up and runs the program, so it gets past the while ( !Serial ) delay(10); // for nrf52840 with native usb line
i've never been more frustrated at a project honestly
its so inconsistent
for the price of this board i expect at least the basic functionality to work more than 10% of the time
It's not the board, but that your computer is allocating a different port every time the board enumerates.
nope. its always com8 when turned on, switches to com9 when it reboots into dfu from normal boot (happens when uploading when not in dfu mode), and always com10 when i manually put it into dfu
the process is always the same and sometimes works fine. i keep an eye on the com ports while it happens
it seems like the process when uploading during a normal boot is this
on COM8, send command to reboot into DFU as COM9
switch to COM9, flash firmware
switch back to COM8 for normal serial communication
that process was working consistently for me until it wasn't
and again, i can manually enter DFU and switch to COM10 but most of the time it will say port busy when I do that and I have to manually enter DFU at least 2 or 3 more times before it works
huh, looks like having cura running at the same time might have been interfering
yeah, i was 3d printing parts for this so i had it open
you gotta disable the USB plugin in cura if you don't need it
it hogs the serial ports
thanks, i'll do that now
"Marketplace" -> "Installed" tab and uncheck "USB Printing".
got it, i use octoprint anyway
same, cura was spitting M105 (report temperature) all over my REPL
oof. well that definitely fixed it, thanks!
@livid osprey the in and out just follow the arrows Right?
The pictures yesterday are little confusing because I will connect just like it is on the Board

And i will connect everything First before snapping appart this time
And does vin needs to follow a special way too or is this ok? Missed one line on the bottom left

If they're snapped apart totally, I think either neopixel DO can be connected to either of the next one's DI. The arrows are just to show the path if its left intact.
not sure because of the info from Hem given here
Yes, the arrows are there to help indicate which side is do and which side is di
Once they’re all snapped apart and mixed up, it’s be hard to tell otherwise
ok. And what about the way of VIN?
Any way is fine.
thanks. again 🙈
the signals for the neopixels are routed through the snapapart sections only in the directions of the arrows if you leave them intact.
Can the MusicMaker be used with the PulseSensor?

I think I have wired everything to where it belongs to. Am I right that in Order to get the Ortho 5x6 Demo function correctly, I have to snap it apart now? @livid osprey

It looks like i am missing a connection 🤔 dont get it

I used the simple Test from your help.
it looks like the GND on your rows are not connected to the common GND, they are just connected between the row keys ?
Is there a way to tell a single Key a special color and the color has to change in another after push?
oh maybe the wrong chat? I will try in makecode
Hello I'm using an Arduino Mega 2560 and a fingerprint sensor AS608 and I'm using the Adafruit Fingerprint Sensor Library, the sensor is recognized (the light turns on) but when I upload it it says "Did not find fingerprint sensor" I was wondering if somenone has any tips!
the light is probably just coming on with power
which fingerprint sensor is it? link to product page?
Yes, you can write whatever code you want to change the behaviors of the lights.
Not all pins on the Mega and Mega 2560 support change interrupts, so only the following can be used for RX: 10, 11, 12, 13, 14, 15, 50, 51, 52, 53, A8 (62), A9 (63), A10 (64), A11 (65), A12 (66), A13 (67), A14 (68), A15 (69).
if using software serial, also need to check pins being used

DollaTek Módulo de Sensor de Lector de Huella Digital óptico de luz Azul para Arduino Mega2560 UNO R3
how are you connected to the mega? which wires to which pins?
Red Wire to 5V - GND to GND - White Wire (RX) to 10 and Yellow Wire (TX) to 42
ok. Thats good. But where do I get this codes from and how do I know how to use them?
I just need it the way
explained above
@autumn timber what does your SoftwareSerial mySerial(?, ?); line look like?
try:
RED (V+) to Mega 5V
YELLOW (TX) to Mega 10
WHITE (RX) to Mega 42
BLANK (GND) to Mega GND
with:
SoftwareSerial mySerial(10, 42);
Didn't work
https://learn.adafruit.com/adafruit-neokey-5x6-ortho-snap-apart/arduino has basically all of the bits of code needed to get something like that working, but it will need some rearranging for it to match what you're looking for.
Adafruit Learning System
The easiest way to create custom ortholinear key matrices!
@autumn timber try different baudrates?
also, maybe not a 5V device?

the adafruit library also may just not work with that model
thanks. The Example Code just dont get me to the Hint I maybe need in order to understand what I have to write the code correctly. Is there maybe a little hint I could use? The rearranging is way way more I do understand :/
@leaden walrus ok, I will try that
Adafruit SPI Flash library use with itsy nRF52840
Hi!
Is there any reason not to use the Adafruit SPI Flash and SdFat (Adafruit fork) libraries with the itsy express nrf52840 board?
The sd_FAT Format sketch compiles fine with itsybitsy nrf52840 express board selected.
The guide I am using is for a Feather m0 board: https://learn.adafruit.com/adafruit-feather-m0-express-designed-for-circuit-python-circuitpython/using-spi-flash

Adafruit Learning System
Get running faster than ever with the first Adafruit Express board
@leaden walrus what do you think I should change?

@autumn timber finger.begin(57600); <-- try different baudrates there
@leaden walrus nothing
could be a different sensor than the library supports
I tryed the Neokey Ortho Demo again and basicly changed the values you mentioned earlyer in here. But there is no function at all. Seems like the Keys not working? How do I activate them? The Neopixel Demos work just fine

it copy the sketch but this errors occure:
Arduino\libraries\Adafruit_Keypad/Adafruit_Keypad_Ringbuffer.h:57:5: note: type 'struct Adafruit_Keypad_Ringbuffer' should match type 'struct Adafruit_Keypad_Ringbuffer'
Adafruit_Keypad_Ringbuffer;
Arduino\libraries\Adafruit_Keypad\Adafruit_Keypad_Ringbuffer.h:57:5: note: the incompatible type is defined here
Adafruit_Keypad_Ringbuffer;

Hey folks, I am having some trouble controlling the nixie tube clock that I have been building. I have been working on a simple library for it, but whenever I open the serial monitor in this simple example, tons of lines which I do not understand are printed. They appear on the same baud frequency as the upload speed, rather than what was set in my code, which I do not get. I turned off autoscroll but with it on it is continually printing this. Has anyone seen this before? What may be causing this? I am using the Feather Huzzah32 (ESP32) board. I will post a screenshot of the code and paste the library code below.

Pastebin
Pastebin.com is the number one paste tool since 2002. Pastebin is a website where you can store text online for a set period of time.
Please note that I have just recently started with this and am doing this as a means of learning Arduino and coding in general. If I have made a stupid mistake or seem to not understand something, please help correct it. Thank you.
Check the "core debug level" setting in the Tools menu. It's probably been set to a level which enables extra diagnostic messages like that. You probably want "none" instead.
Thank you. I will try this now.
I am now getting a new message:

That seems to indicate a watchdog timer reset ("WDT"), which might happen if your code crashed or locked in an infinite loop.
Ok. Thank you for your help. I will fiddle around with this some more later on and try to see what is causing it. Have a nice day
I want to use a bluetooth module with my arduino nano, I've used it with an uno, and know that I shouldn't connect it to pins 0/1 because it interferes with uploading. On the uno, I believe I used alternately 11/12 or 12/13, I know some pins work but not all, which pins can I use for the arduino nano?
Both the Nano and the Uno have only one hardware serial port, but if you use a software-serial library, you should be able to use almost any I/O pin.
@leaden walrus hello. I have problems using the Sample Sketch Adafruit Keypad\Ortho 5x6Demo. I get this Error:
C:\Users\nosfe\Documents\Arduino\libraries\Adafruit_Keypad/Adafruit_Keypad_Ringbuffer.h:57:5: note: type 'struct Adafruit_Keypad_Ringbuffer' should match type 'struct Adafruit_Keypad_Ringbuffer'
Adafruit_Keypad_Ringbuffer;
^
C:\Users\nosfe\Documents\Arduino\libraries\Adafruit_Keypad\Adafruit_Keypad_Ringbuffer.h:57:5: note: the incompatible type is defined here
Adafruit_Keypad_Ringbuffer;
^
I write you because I found only related to something like this on Github: https://github.com/adafruit/Adafruit_Keypad/issues/6
GitHub
Hi. This is the error message on adafruit keypad library testing keypad_test arduino sketch. Arduino:1.8.9 (Windows Store 1.8.21.0) (Windows 10), Tarjeta:"Arduino Due (Programming Port)&am...
Any idea what I can do about this?
im trying to brogramm an Rotary encoder but it keeps giving me 0 and -1 if i rotate it
Has anybody been able to successfully set up / Upload code via the Arduino IDE on a macintosh for the LED glasses that came in the latest Adabox (20)? I get an obscure python error that I can't decipher and can't upload the demo code. Circuit Python stuff works fine.
i have the SSD1306 OLED Display, how can i make it so that it displays things (like a bitmap for example) in more than 1 color?
If it's a monochrome display, that won't be possible.
Can you link to the product page for the one you have? The SSD1306 just specifies the driver chip, not the display panel.
oh nvm its just white text
@lean prism can open a new issue, be sure to specify what hardware platform you are building for
I am on Windows 10 and use arduino micro. @leaden walrus
Answering my own questuon after simply giving it a go - works great with nRF52840 express 🙂
hi guys, i'm trying to use the fontconvert tool included with the adafruit gfx library however i'm running into an issue when building it that ft2build.h was not found. i have freetype2 package installed (i'm on arch linux) and the package does show under /usr/include so i'm not sure what is causing this error. maybe ft2build is an outdated name or something? any help is appreciated, thanks 🙂
never mind, i'm an idiot, was building manually with gcc instead of using the makefile 
;)
pico-sdk seems to leverage the OS quite a bit. I installed arm-none-eabi-gcc (whatever that sequence is) to satisfy a dependency and it works just fine.
So I mean it liked the Debian package for that version of gcc.
Usually, they fully support Linux in these kinds of things.
Hi all, I was wondering if anyone can point me to the definition of Arduino pins to microcontroller ports for the SAMD51. For example, on https://learn.adafruit.com/adafruit-matrixportal-m4/pinouts, it notes the board.ESP_RESET is Arduino pin 30. Is there a way for us mortals to find that mapping? I have a few other pins on that design that I know the port number (e.g. PA12 and PA13) but I need the Arduino pins to use them in PlatformIO
Yes, you can look at the same files the Arduino IDE uses to describe that mapping. Where the files are varies somewhat with which environment you're using, but on MacOS, the file for the that board is in my home directory, in Library/Arduino15/packages/adafruit/hardware/samd/1.6.5/variants/matrixportal_m4
So boards in general go in the Library folder in Arduino15/packages, then there are subdirectories for the various vendors. Under that, the boards are under "hardware", then sorted by architecture (the M4 is a SAMD), then version.
on windows, it is in
C:\Users\<username>\AppData\Local\Arduino15\packages\adafruit\hardware\1.6.5\variants
Note that normally folder AppData is hidden from view, as most users do not need to know of its existence (or at least, so Microsoft thinks), so you need to turn on option View->Hidden items in the file browser
Or you can look it up in the github repo: https://github.com/adafruit/ArduinoCore-samd/tree/master/variants/matrixportal_m4

GitHub
Contribute to adafruit/ArduinoCore-samd development by creating an account on GitHub.
@north stream / @vivid rock thanks for the tip! That is exactly what I was looking for. I didnt realize all the pins I needed already had #defines in those files so Im all set!
Hey everyone,
I am having problems controlling a stepper motor using my Arduino Nano. The code I'm trying to use is found here: https://atlantisq.wordpress.com/portfolio/obj-2601-barn-door-tracker-astra-v2-1/
I can't seem to make the stepper turn, however other sketches do make it turn. I don't fully understand the code provided so I don't know how to troubleshoot
Astra is a barn door tracker for astrophotography. It uses a straight leadscrew drive and can be driven by a 5V USB power source. An Arduino is used to control the speed of the leadscrew in order t…
What other sketches are you using?
https://www.instructables.com/BYJ48-Stepper-Motor/ This sketch does make the stepper turn

Instructables
BYJ48 Stepper Motor: Stepper Motor is a motor controlled by a series of electromagnetic coils. The center shaft has a series of magnets mounted on it, and the coils surrounding the shaft are alternately given current or not, creating magnetic fields which repulse …
MIght be a problem with the stepper.h library, since the other example seems to have hard-coded its own stepper motion. Do you get any errors in your serial output?
are you referring to the example that is working when you're talking about the "other example"?
Yes
Yeah, It has the weird use of cases
I do not seem to get any errors, uploads work fine and the serial output is as expected, allthough it goes very fast
when I do turn off the comments, that is
A video showing the problem and my driver board
not sure why your step states are alternating like that, there's no way your stepper would turn if that's the sequence it's following.
That's what I was thinking, but I'm not sure what part of the code makes it behave like this
Try changing the steps in the while loop from 2 to 1?
so like this?
stepper.step(1);
steps=steps+1;```Try that. If it doesn't work, you can also play with the speed setting.
Should at least turn now. My guess is the stepper library defaults to 4 steps per cycle instead of 8...
The speed is very important though, because it is supposedly programmed in such a way that the speed makes the contraption track with the rotation of earth
Yeah, you might have to do some adjustment somewhere else.
I can't speak for the motor math the original author did, but the difference between the motor turning and not makes me think that this is the original desired behavior the author wanted when he set the steps to move by two at a time.
right
I would just use it as is, while being aware that the math may or may not be off due to the change you had to make to get it to work in the first place.
the '2' would point to the amount of steps the original author would want it to take
Probably a difference in assumed default behavior.
Test it and see if the speed matches, I guess.
Which is confusing me, because i'm using the exact same hardware haha
Hm I'll try it some more
thanks anyways!
Hey everyone. I’ve been trying to create a program that essentially generates a PWM pulse on the rising edge of one of my IO. However, I have very tight time constraints so I found that using analogWrite for generating pwm was a little slow.
I resorted to polling the channels who’s rising edges i care about and basically just toggle the output high and low with the calculated period. The problem now is that the delay function isnt very accurate at low uS values and also seems to have some overhead. Yielding slightly off duty cycles.
I was hoping for help on this. Perhaps help writing a function that generates a PWM signal given a specific frequency and duty cycle.
I can send code if that helps
Generally you'd probably want to make use of a timer peripheral on the microcontroller, but the details of that will depend on the chip you're running on.
Im using a seeeduino xiao, samd21 mcu
I tried writing some stuff with timers but i dont have a ton of experience with it
Cool, that's a nice modern chip which should have a pretty capable timer.
Any resources that might help me get going?
I have three 120hz signals that come in one after the other, with a little dead time between. Ill have to change duty cycle and frequency at each rising edge
Not off the top of my head, I'm afraid. I'd just be doing the same Google searches you would. 😉
Fair enough
#define rs 12
#define rw 11
#define en 10
#define d4 9
#define d5 8
#define d6 7
#define d7 6
#define contrast 0
#define left 13
#define right 12
#define pot
LiquidCrystal lcd(rs,rw, en, d4, d5, d6, d7);
void setup() {
//analogWrite(5,contrast);
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// Print a message to the LCD.
lcd.print("hello, world!");
pinMode(left, INPUT_PULLUP);
pinMode(right, INPUT_PULLUP);
pinMode(5, OUTPUT);
digitalWrite(5, LOW);
}
void loop()
{
int state = 0;
//lcd.print("hello");
//while(true)
{
delay(1000);
lcd.clear();
if(digitalRead(left))
{
lcd.setCursor(0, 1);
lcd.print("turning left");
state = 0;
}
else if(digitalRead(right))
{
lcd.setCursor(0, 1);
lcd.print("turning right");
state = 1;
}
//else if(!digitalRead(right) && !digitalRead(left)) state = 2;
else state = 99;
switch(state)
{
case 0:
//todo set stepper direction left
//todo set speed
break;
case 1:
//todo set stepper direction right
//todo set speed
break;
case 2:
//lcd.setCursor(0, 0);
//lcd.print("following mode");
//todo set stepper direction right
//todo follow pot
break;
case 99:
//lcd.setCursor(0, 0);
//lcd.print("idle");
break;
}
}
}
oops, oh well, my code is printing random characters on the LCD screen. any idea what this is causing?
the only thing I found was that I couldnt use pwm for the contrast and that would possibly be the cause. and that I should use a pot. but I dont have a pot and not much room on my perfboard for a voltage divider and hoped putting it on a pin would do the trick
which LCD?
1602A
does "hello, world!" show up?
the hello world example works fine
I am trying the set cursor example right now
it does show up on startup as well. then it adds random characters
are left/right wired to buttons?
so high/true will be not pressed
if(digitalRead(left))
{
lcd.setCursor(0, 1);
lcd.print("turning left");
state = 0;
}
you want that to happen when the button is pressed?
yes
I think I found a different issue, I miscounted the ports. 12 is already used for the LCD, and overwritten for the one of the buttons
cool!
another question, is the arduino IDE smart enough to decide what size of integer to assign. eg should i use int or should I use fixed width integers?
int will be different sizes on different boards:
https://www.arduino.cc/reference/en/language/variables/data-types/int/
if you want known fixed size, use the stdint defs, like uint8_t
thank you!
another question, can the IDE compile C code? I have an AVR stepper library I would like to use


I have a CAP1188 that will not communicate at all- no lights will light up when I touch the respective capacitive inputs
Any ideas?
this is default code

nevermind, forgot I melted a hole in the breadboard there 🧠
Yes, Arduino uses Wiring, which is a dialect of C++, which is in turn a superset of C.
I assume arduino is capable of taking advantage of the 2 cores in an RP2040?
Yes, I think so
Hi everyone! I have a little project I'm working on using a Nano plus an MPU6050, BMP280 and an HMC5883. I'd like to log the data from these sensors and be able to access it on my computer after each run. However, I'd like to do this with a flash memory. I was hoping you guys could help me with this as I've never worked with flash memory before using Arduino and the greatest challenge I've found is getting the data from flash.
The common solution here is an SD Module, however, the modules I've found so far are too big for the 4x6cm form factor I'm using and I want to (1) stay within that form factor and (2) use a module that is high-vibration tolerant - so an SD Module is probably a no-go (unless you know of any modules small enough). I have found two breakout boards that might work for my project. There's the W25Q64 64Mbit 8MByte Flash Storage Module and Adafruit's XTSD 512 MB breakout boards. I'm heavily inclined towards the XTSD given its greater memory storage despite being bigger than the W25Q64 module. What I don't know is how to get the logged data from either module (if that's even possible).
- Is it possible to 'dump' flash via the Nano's USB port onto the serial monitor? or
- Maybe add some male header pins to my project and connect an SD Module with an SD card and 'dump' flash onto that external module (after each run)?
- Do you think the 328 MCU on the Nano would struggle with this?
I haven't bought neither the XTSD nor the W25Q64 modules because I want to pick one first. Apologies for the newbie questions but I'd appreciate any info, resources or help with this. Thank you!
SdFat and TinyUSB libraries allow one to access filesystem on a flash memory chip and even make it accessible to the computer as if it were a removable USB memory stick
however, not all boards are supported - those based on m0/m4/esp32-s2(note s2!) work, many others don't
maybe instead of nano, use something like itsy bitsy m4?
Man I'm losing my mind with the caterina bootloader. What a total nightmare.
Thank you so much for your response! I'll check out those libraries and the suggestions you made. The bitsy m4 is definitely worth considering switching to. Thank you!
i have a Adafruit Bluefruit LE UART Friend, and i would like to change it's bluetooth name. is that possible?
looks like i should use : AT+GAPDEVNAME
but i don't know how to pull the existing name and do a string comparison...
yes but it only gives me the command, not how to pull it as a string and then do a comparision.
If you send the command with no args, then you will get back the name on the UART connection and can read it.
yes. but how do the string comparision in arduino
there are several ways:
https://www.arduino.cc/reference/en/language/variables/data-types/stringobject/
can just try == as a first pass. with some trim also
new to this whole Arduino and Adafruit stuff (thrown onto a school project). Currently have an Arduino Mega, and an Adafruit ultimate gps. I am simply trying to parse the gps data that is coming in, but having many problems. The only time I can get any data off of the GPS is if I have the gps plugged into RX and TX (pins 0 and 1), and a blank sketch uploaded into the Arduino. My issue is that I need to get the data to work with TX2 and RX2. I was trying literally any of he available testing code that is given in the library such as the Hardware Serial echo test. But nothing I have tired has worked. not even something as simple as the following code is giving me anything. Serial2.available() is always reading as 0.
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
Serial2.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
if(Serial2.available() > 0)
{
char c = Serial2.read();
Serial.print(c);
}
}
@willow compass GPS shield or breakout?
I'm not sure which pins are TX2 and RX2, but Serial 2 should be on GPIO pins 16 (TX) and 16 (RX)
(16 and 17, that is.)
this one?
https://www.adafruit.com/product/746
Yes!
So my team has been working on it for two hours, I had to leave shortly, they have run through dozens of different tests and basic inputs and pins, the most they have been able to read out of it is a -1
Other wise the only time we get data is pins 0 and 1 with a blank sketch, but obviously this isn’t viable
"shortly" = how long? got some time to work things now?
I have time yes
you're using a mega?
Yes
table here has good summary of serial pins:
https://www.arduino.cc/reference/en/language/functions/communication/serial/
one confusing point may be that there will be two serial instances to consider
one for the Serial Monitor
and one for the GPS
if they aren't already in use, can use the Serial1 pins and follow the hardware serial examples
19(RX) and 18(TX) on the mega
Serial 1 is taken
we have Serial 2 and 3
and we have been changing any variables for Serial2 if it uses Serial1
i'm going to try Serial 1 real quick just to see
if it's taken, then don't worry about it
the others should work just as well
just need to change code
i'm testing here with a mega and the GPS breakout
this works for me:
5V to VIN
GND to GND
16(TX2) to RX
17(RX2) to TX
what code?
and then use this example:
https://github.com/adafruit/Adafruit_GPS/tree/master/examples/GPS_HardwareSerial_Parsing
and change only one line:
#define GPSSerial Serial2



hmmm...not getting any sentences
how's your soldering on the breakout? and your wiring connections in general?
I would assume fine, but I am not the one who was involved with that, our project instructor has been creating our wires and such for us
at this point, checking the hardware setup would be the best next step
if you can post a photo here, can take a look
or posting in the forums is another option

thanks. and disconnect the wires. want to check the header pins on the breakout.


thanks. soldering looks fine.
are the red/black/white/blue wires going directly to the mega?
Yes
they're female/male jumpers, so going directly into mega headers?


yes
white is RX from GPS, and blue is TX from GPS
16(TX2) to RX
17(RX2) to TX

cool. it's working now.
that's the general output you'll see until it gets a lock
then there will be more info
alright, i'll have to do that later as the wheels are off of this thing
but thank you for the help
np. looks like a common TX/RX connection confusion. happens all the time.
in general, you want:
TX <-> RX
RX <-> TX
bruh, instructor told us the opposite
it's a confusing topic
there are other protocols where you do match pin-to-pin
like SPI or I2C
makes, sense, we have that with other things and it works fine
a lot of confusion comes from devices that will label their RX pin as TX and their TX pin as RX
just to allow TX<->TX and RX<->RX when making wiring connections
but for others used to the general connection scheme, they will try it the other way, get it wrong, be confused, etc.
was about to say, even on the adafruit guide it says tx to tx and rx to rx
but that makes sense
it's a "fun" issue that we just have to live with. there's no simple solution.
the GPS guide?

ugh. so...yet another layer of confusion.
yah, that's for a specific use case.
with the uno
ignore that section of the guide. it doesn't really apply for your use case.
just skip to this section:
https://learn.adafruit.com/adafruit-ultimate-gps/arduino-wiring
and since you have available hardware serial, use that info. ignore the "software serial" info.
GPS RX to Feather TX and GPS TX to Feather RX.
then it's more inline with expected normal wiring
Alright
Thank you !
I apologize for added confusion of being confused in general. Was thrown in the deep end on this
np. and nothing really to apologize for. as simple as serial should be, it can be amazingly confusing.
Do I need to install something special to mount circuitpython on a Feather M4 Express under Ubuntu on a Raspberry Pi? It shows up under Windows 8.1, but not on a Raspberry Pi running either Ubuntu or Raspbian.
I do have a lot of disks showing up when I run sudo fdisk -l but I've no idea if one of them is my Feather. I'm new to Linux and Adafruit products.
Maybe this is the correct drive?
Units: sectors of 1 * 512 = 512 bytes
Sector size (logical/physical): 512 bytes / 512 bytes
I/O size (minimum/optimal): 512 bytes / 512 bytes
try checking dmesg after plugging it in
you may need to mount it
but if you're running the desktop version, i'd expect it to automount it similar to windows
also. maybe be better in #help-with-circuitpython or #help-with-linux-sbcs
dmesg gave me pages and pages of text. I'm not sure what I'm looking at, but there are errors.
248 KiB is a pretty small drive.
pi@raspberrypi:~ $ dmesg | tail -20
[ 255.205776] input: Adafruit Industries LLC QT Py M0 Keyboard as /devices/platform/soc/3f980000.usb/usb1/1-1/1-1.3/1-1.3:1.3/0003:239A:80CC.0001/input/input3
[ 255.272282] input: Adafruit Industries LLC QT Py M0 Mouse as /devices/platform/soc/3f980000.usb/usb1/1-1/1-1.3/1-1.3:1.3/0003:239A:80CC.0001/input/input4
[ 255.273014] input: Adafruit Industries LLC QT Py M0 Consumer Control as /devices/platform/soc/3f980000.usb/usb1/1-1/1-1.3/1-1.3:1.3/0003:239A:80CC.0001/input/input5
[ 255.273477] hid-generic 0003:239A:80CC.0001: input,hidraw0: USB HID v1.11 Keyboard [Adafruit Industries LLC QT Py M0] on usb-3f980000.usb-1.3/input3
[ 255.369062] usbcore: registered new interface driver uas
[ 255.392328] cdc_acm 1-1.3:1.0: ttyACM0: USB ACM device
[ 255.395175] usbcore: registered new interface driver cdc_acm
[ 255.395198] cdc_acm: USB Abstract Control Model driver for USB modems and ISDN adapters
[ 255.464147] usbcore: registered new interface driver snd-usb-audio
[ 256.234785] scsi host0: scsi scan: INQUIRY result too short (5), using 36
[ 256.234821] scsi 0:0:0:0: Direct-Access Adafruit QT Py M0 1.0 PQ: 0 ANSI: 2
[ 256.239321] sd 0:0:0:0: [sda] 129 512-byte logical blocks: (66.0 kB/64.5 KiB)
[ 256.251402] sd 0:0:0:0: [sda] Write Protect is off
[ 256.251434] sd 0:0:0:0: [sda] Mode Sense: 03 00 00 00
[ 256.254217] sd 0:0:0:0: [sda] No Caching mode page found
[ 256.254247] sd 0:0:0:0: [sda] Assuming drive cache: write through
[ 256.278764] sd 0:0:0:0: Attached scsi generic sg0 type 0
[ 256.335073] sda: sda1
[ 256.361873] sd 0:0:0:0: [sda] Attached SCSI removable disk
[ 256.942732] FAT-fs (sda1): Volume was not properly unmounted. Some data may be corrupt. Please run fsck.
pi@raspberrypi:~ $ ls /media/pi/
CIRCUITPY
that's running latest rasp pi os desktop
after plugging in a QTPY running CP 7
it did automount it under /media/pi
i'm ssh'd in, so not sure what the actual desktop UI does
I ran mount and I see no /media/pi
pi@raspberrypi:~ $ mount | grep CIRCUITPY
/dev/sda1 on /media/pi/CIRCUITPY type vfat (rw,nosuid,nodev,relatime,uid=1000,gid=1000,fmask=0022,dmask=0022,codepage=437,iocharset=ascii,shortname=mixed,showexec,utf8,flush,errors=remount-ro,uhelper=udisks2)
so it must be something with the OS version you're running
Thank you. That at least narrows it down.
I should have mentioned that it mounts fine in boot mode.
I'm going to flash the board and try again. maybe I corrupted something.
good idea. that can happen for various reasons.
and you'd see same behavior on another machine
even after installing new firmware, you may still get same behavior
neat! only took a minute to get VNC setup.


Hi guys. How loud should my buzzer be for the driver to hear it? I'm trying to make an alert system for a motorcycle, if it's over speeding, it will buzz. So, I'm still on papers so can't really test it
For posterity's sake, erasing the Feather M4 Express and reinstalling circuitpython worked. It now mounts properly.
The short answer is "pretty loud". The more accurate answer would depend on how loud the motorcycle is, how loud the surrounding traffic is, the type of helmet the driver is wearing, their hearing acuity, etc.
hi ...
this is my Arduino [ESP32 - MPU 6050] project ...
how can i make similar that on Visuino?
thanks a lot. 🙏
Does anyone know (or know where I can find out) what the GPIO are for the on-board QSPI flash for the Feather RP2040 (or really any of the Adafruit RP2040 boards)? I'd like to use it in Arduino with the Philhower core but I've had a difficult time finding this information.

Are those the GPIO though? As far as I can tell from the rest of the schematic, those numbers don't necessarily correlate to GPIO 🤔
I'm not sure what you want to do
That's actually a good question lol. What I'd like to do is just use a filesystem of some sort with the built-in flash
I was trying to work backwards from how I usually do it which is to use the Adafruit fork of the SdFat library. However, that doesn't work in the Philhower core, so I thought I'd explore why and how/if I could fix it.
on the RP2040 these are dedicated pins, due to having no internal flash, the code always runs off the external flash, unlike adafruit's "express" boards where it's separate and not used by arduino by default
But, if there's already some other way that works, that will work too lol
so I don't know how you access the flash as such, but I would assume it's already handled at some level and you don't need to worry about the pins
Right, that makes sense. If I look at the pinout diagram in the learn guide for the Feather M4 Express, it actually does list the GPIO for those though, even though they aren't broken out. Unfortunately, the RP2040 diagram does not do the same.
I'm looking into this now. It seems like there must be some built-in way in the core to use a file system.
Thanks for trying to help y'all, I really appreciate it 
Got something! It looks like what I'm supposed to do here is use LittleFS instead of the Adafruit SDFat fork. In the Philhower core you can choose how much of the flash you'd like to dedicate to the firmware and how much to the filesystem. I chose the size I wanted to use, and successfully built and ran the SpeedTest example, which performs the basic filesystem operations.
The QSPI pins are dedicated pins; they are not GPIO pins
Understood. Thank you!
ah, I see Neradoc said that already
I still appreciate it. I was banging my head against this for awhile, and I always appreciate offers to help 🙇
I forget to scroll discord when I see a query and hit the reply button 🙂
Same. 🤦🏾
trying to understand some C++ code for shutting down a pi on a button press:
</pre>
<pre>#include <wiringPi.h>
#include <stdio.h>
#include <unistd.h>
#include <linux/reboot.h>
int ioPin = 7; // GPIO04, physical pin 7
int main (void) {
wiringPiSetup ();
pinMode (ioPin, INPUT);
printf("c-watch v0 is now running.\n");
while(1) {
pullUpDnControl(ioPin, PUD_DOWN);
if (!digitalRead(ioPin)) {
printf("LOW\n");
break;
}
delay(1000);
}
printf("Got signal, starting shutdown.\n");
// Would like to change to dbus at some point
system("shutdown -P now");
delay(500);
return 0;
}</pre>
<pre>
What do the </pre> and <pre> commands do?
ahhh ok
it's commonly used to surround code elements, so that's why it's there in the first place
It looked like HTML but I don't know much cpp so I had a confuse
what would be a reason to use C++ over python for this? Speed?
that'd be a general reason for c++ vs python
ok cool
but in this case, it's not critical, so not really necessary
a python script would work just as well
on a pi, where would printf in C++ or print in python go?
do you mean what are the python equivalents for printf and print ?
no sorry, where does the output go
like if I add a bunch of print statements to my code that's running on start on the pi, am I just shouting into the void?
in both cases, C++ and Python, they'd go to standard out
hmm let me google that
you can end up shouting into the void, if for example you run things a service (sysemd)
yeah I'm using systemd
Having an issue with it actually but that's in the other channel
then you'd want to look into how handling standard out is dealt with
ok cool. I don't need to monitor print statements, was just curious
there's probably a more specific way to log message when using systemd, so it'll show up nice when running systemctl status etc.
but i actually don't know the specific details, i've only done very simple services with systemd
No worries, I don't need to log anything. My script that runs on start plays music so it's easy to tell if it's running or not
yep. and a basic "is it running or not" can be determined without any specific prints.
just the basic output from status will let you know
while I have you, do you mind weighing in on my issue in #help-with-linux-sbcs ?
trying to run the selftest on a pyportal-titano
https://github.com/adafruit/Adafruit_Learning_System_Guides/tree/main/PyPortal_Titano_ArduinoSelfTest
and compile fails with
https://pastebin.com/Ej3TtTeA
GitHub
Programs and scripts to display "inline" in Adafruit Learning System guides - Adafruit_Learning_System_Guides/PyPortal_Titano_ArduinoSelfTest at main · adafruit/Adafruit_Learning_...
Pastebin
Pastebin.com is the number one paste tool since 2002. Pastebin is a website where you can store text online for a set period of time.
downgraded to wifinina-1.8.0 works now
Hi
Could someone help me please?

here plzplzplz
nvm i understood as i drew it xd
Hey guys, I need help with the BNO055 IMU. I have two servos and the IMU on an arduino mega 2560 and I am unable to operate the two servos simultaneously while the IMU is working. The problem seems to be with the line in the main loop:
bno.getEvent(&event);
As soon as this line is uncommented, only one servo works. Any idea what the problem might be? Also, if one of the servo is plugged with the IMU working, it jitters. Using Adafruit_TiCoServo.h solved the jittering, but not the simultaneous servos problem.
I am done working on this for today and will get back at it tomorrow, in the meantime if you have any suggestions it would be greatly appreciated!
my main loop is set at 100Hz, maybe its too fast?
here is the code:
This is probably a ridiculously simple question, but I'm confirming from the Python world into Arduino by following the guides...
q: is it possible to have a text or ini file or similar on the device that your sketch can read from? My guess is no, after you compile and upload, the board doesnt appear in windows like it did when it was Circuit Python
there's a trick for that, like this project: https://learn.adafruit.com/pyportal-animated-gif-display
it uses Circuitpython to format the external flash as a drive, then overwrites with Arduino code that uses tinyUSB to present the files as a flash drive to the PC
But if it overwrites the Arduino code, then you need to reflash to get your program going?
first you flash with CP to create the drive, but you do it only once, then you replace with the arduino code, which then accesses the drive
subsequent updates to the arduino code will not erase the drive
hmmm interesting. Im reading through the sample. Im going to have to read it a few times to get this to sink in
I'm coming from the QTPY / NeoKey project (CP wont run this, so I'm here in Arduino) -- simply, my idea was having a text file with 4 lines, a "key" if you will for each line, thus an easy way to customize the macro you want. It sounds like, in theory I should be able to do this with the ardunio code using this hack
yes - this is what SdFat library gives you.
You can format the flash as FAT filesystem either using the trick above or using the flash formatter sketch included as example in SdFat library.
In addition, TinyUSB library allows you to access the formatted flash filesystem from a computer as if it were a USB memory stick
Ok, thanks both - I'm making notes here; will giver it a try
When using the Adafruit PCA9685 16 channel PWM Servo Driver, how do you map servos to their channels on the board (when using the Ardunio IDE)? I have been looking through this tutorial https://learn.adafruit.com/16-channel-pwm-servo-driver?view=all#using-the-adafruit-library however as far as i can see it doesn't mention it. Any other example code i've looked through only does a sweep of all the channels on the board and never references a single channel. I've been looking all day so any help is greatly appreciated.
I'm not sure what you're asking. You specify the channel number that you want to control in the setPWM() function call.
I get the error that 'setPWM' was not declared in this scope
Do I need to include unit8_t ? Also i assume i can leave the rest blank as i don't need it
No, that's just the type the argument expects.
So all i need is setPWM(0) ?
No, you do need on time and off time as well.
getPWM() is single-argument, but setPWM() must have all three arguments.
It would probably be fruitful to look at how the function is used in the example code.
Would you say getPWM() is the equivilent of attaching a pin on the Arduino?
Sorry i don't mean to waste your time but i'm new so reading the examples doesn't always help (when i don't understand what it's defining). This link is useful though, thank you
No, getPWM would return the PWM reading of the pin. The equivalent of attachment is done when instantiating Adafruit_PWMServoDriver().
Ah yes that makes sense. Do I still need to turn the PWM output On and Off if im listening for a variable through Serial though, and if so what would they be?
The on and off times would be the time your PWM turns on and off relative to its 4096-tick cycles. This timing controls your duty cycle, so you absolutely need to set these based on whatever variable you're listening for.
Where can i learn about Duty Cycles then? I saw the tutorial mention something about it however it was for controlling LEDs so i didn't think it was applicable
PWM, or Pulse-Width-Modulation, is the process of rapidly switching a signal on and off to control the amount of power to a device. The duty cycle is how long the signal is on for, so it's essentially the proportion of current used to power a device. It's often used to create a pseudo-analog output on a digital pin. https://en.wikipedia.org/wiki/Pulse-width_modulation

Pulse-width modulation (PWM), or pulse-duration modulation (PDM), is a method of reducing the average power delivered by an electrical signal, by effectively chopping it up into discrete parts. The average value of voltage (and current) fed to the load is controlled by turning the switch between supply and load on and off at a fast rate. The lon...
Hi, i am thinking in make led tubes with ws2813 led strips
Like that:
(FOTO 5)
Every tube have an input and output
Connected like that photo:
(FOTO1)
The first problem is that the ws2813 led strips if two LEDs burns consecutive, the rest of the LED strip after the two consecutive burned LEDs stop working , i lost all the tubes if this happen.
(I cant Weld leds or change the tube, because its in the ceiling)
Leaving the whole setup like this:
(FOTO2)
I can do this?
(FOTO3)
In this photo what I do is that the data pin of the LEDs is directly connected to the Arduino and does not pass through the rest of the LED strips of the other tubes, so that if two consecutive LEDs are burned, only said tube turns off and the rest will continue to work, is it possible to do this? but every tube needs to work independent(with other colors)

I forgot to thank you after i got caught up reading. You've helped a lot
It is possible, but you will need shunt resistors across the jumped connections to prevent the data from desynchronizing. You can reference the schematic of the adafruit 5x6 snap apart keypad for a better idea of why I mean.
Not sure what an appropriate resistance would be, but I believe that snap apart keypad used something on the realm of 2.2kohms?
Also, in the occasion of the burned tube, the data will shift past the burned tube to the next pipe, if that offset would bean issue for your application.
Foto 3 is also connecting the next strip in the wrong direction
I try it but the signal is repeated it the two tubes, i am using Jinx
ohh yes
Has anyone tried using the TX/RX pins on the new Feather ESP32-S2? Not only can I not seem to use them for UART, they don't seem to work at all for me 🤔
does the flora have analog in?
Yes, the 4 main data pins are analog-capable: https://learn.adafruit.com/assets/2845
thanks
Hey I'm having some issues trying to upload code to an Adafruit Feather M4 Express from the Arduino IDE, and I can't find much about it online other than people mentioning that the issue seemingly solved itself

I have my Adafruit hooked up via USB to my device

Right now I'm just trying to upload a mostly empty file to the chip to get it working
Arduino: 1.8.16 (Windows 10), Board: "Adafruit Feather M4 Express (SAMD51), Enabled, 120 MHz (standard), Small (-Os) (standard), 50 MHz (standard), Arduino, Off"
Sketch uses 10876 bytes (2%) of program storage space. Maximum is 507904 bytes.
Device : ATSAMD51x19
Version : v1.1 [Arduino:XYZ] May 17 2020 17:56:23
Address : 0x0
Pages : 1024
Page Size : 512 bytes
Total Size : 512KB
Planes : 1
Lock Regions : 32
Locked : none
Security : false
BOD : false
BOR : true
Write 11132 bytes to flash (22 pages)
[==============================] 100% (22/22 pages)
Done in 0.204 seconds
Verify 11132 bytes of flash
[======== ] 27% (6/22 pages)
SAM-BA operation failed
An error occurred while uploading the sketch
This report would have more information with
"Show verbose output during compilation"
option enabled in File -> Preferences.
This is the error log I get
Then upon failing my device indicates that a device disconnects, and it suddenly the board appears on COM4 instead of COM5

Does anyone know what's up with this?
- enable verbose output during compilation and upload and paste in the output here
- try unplugging the feather from the breadboard and upload again so that nothing is connected except usb
windows likes to change com ports so it's normal
Over 2000 characters

This also happens seemingly at random

It also can't find the board anymore
are you pressing the reset button? if you double-press the reset button then it goes into uf2 bootloader mode which allows you to drag uf2 files to "upload" them (which actually just flashes them)
it fakes a disk drive so you can upload a special file to flash it
I didn't this time, just unplugged the cable and plugged it back in the same port
can you double click the reset button to get into the bootloader mode?
(a drive should pop up, ignore it)
It did yeah
then try to upload over the new serial port (which won't have a name like "Adafruit Feather M4 express" this time)

close the port menu and open it back up to refresh it
like hover away
then hover back
it's weird
Arduino itself?
the computer*
do you have antivirus other then windows defender
maybe, some of them do that
Some programs are known to cause issues with COM ports. Offhand, I know Ultimaker Cura does that...
Restarted and it's still showing up under COM4
I'll try disabling security for a sec I guess?
I should also mention that the red LED marked #13 on the chip is now fading on and off
Am I missing some file that allows it to verify the uploaded files or something?
red fading would indicate bootloader mode. neopixel should also be green?
and you should see FEATHERBOOT folder
I finally figured this out. I'm assuming it's just because the Feather is so new, but it looks like the pins RX/TX pins aren't set up correctly in Arduino. I had to manually tell Serial1.begin which pins to use:
Serial1.begin(115200, SERIAL_8N1, 38, 39);
Actually thanks to the #circuitpython-dev channel, I was able to trace from a recent PR updating the neopixel power pin name to the file where all the pins are defined for CircuitPython and figure out what the correct pins were 😄
@green thunder weird. was that the one with or without BME280? probably doesn't matter though.
It's the one without
thanks. gonna take a look...
Thanks @leaden walrus 😄
@green thunder yah, i'm seeing same thing. you're probably also correct about it being because of new board. i'll pass this on.

at least makes sense that it works when code matches hardware 🙂
Thanks for verifying!
Hi just curious if anyone has any examples of midi in the seesaw library?
Hi all, I am hoping to emulate EEPROM behaviour on Feather nrf52840, any examples to read and write variables instead of entire file? Found this , but not enough information to get it working. I would appreciate any help. https://github.com/adafruit/Adafruit_nRF52_Arduino/tree/master/libraries/Adafruit_LittleFS/src/littlefs
GitHub
Adafruit code for the Nordic nRF52 BLE SoC on Arduino - Adafruit_nRF52_Arduino/libraries/Adafruit_LittleFS/src/littlefs at master · adafruit/Adafruit_nRF52_Arduino
Hi, I want to know. If we brutally shut down the Atmega board is it dangerous ?
Brutally? Are you shutting it down with a chainsaw?
I mean if a power outage occurred when it’s in function
Oh, only if it occurs while writing data.
And at the worst case, it's usually corrupted data that can be cleaned up later.
Ok Thanks
Hello, I allow myself to come back to you because I would like to know if it is possible to communicate with this serial port by an arduino:

It doesn't give the signal levels or encoding, but probably?
It's generally not a matter of "can" or "can't", it's usually more a question of "how easily..."
Here is the type of component behind the connector:
I am okay. Sorry for my wording
Nono, don't be sorry. I was just making a point most people don't realize.
The only limitation that Arduino struggles with in certain cases is speed. 16MHz is more than enough for most applications, but it's the only hard restriction in the case of a serial application. Other incompatibilities such as logic voltage differences can be worked around with supplementary external circuitry.
Compared to the datasheet, I think 16Mhz is sufficient unless I am mistaken
I would be surprised if it wasn't, haha.
No, the Arduino is certainly capable, it's more a question of what kind of signals you need to get the desired outputs.
Definitely doable.
it's a port serie 8bit cmos
Yep, and looks like it uses standard 5V logic, so it shouldn't require any external voltage shifting.
I am okay. But I'm stuck on the wiring and the program
Do you have a site or an example for me?
Since it seems to be a shift register, you can use the arduino shiftOut() function to send data to it. The details, of course, will depend entirely on what the device is expecting. https://www.arduino.cc/reference/en/language/functions/advanced-io/shiftout/
The Arduino programming language Reference, organized into Functions, Variable and Constant, and Structure keywords.
Thanks a lot, I'll give it a try, but it's the same for reading?
What do you do if you ever had a mess like this of wires on your arduino/breadboard ?
