#help-with-arduino
1 messages · Page 99 of 1
Hi all, anyone know how/if I can get serial output from this GPS module? It mentions a serial control pin, but I'm not sure where that is, nor what exactly it does.
I'm looking to read the serial data from the GPS module via Hardware serial port on a teensy 4.1

The Ultimate GPS module you know and love has a glow-up to let it be easily used with any computer, not just microcontrollers! With the built in USB-to-Serial converter, you can now ...
That GPS module is a USB version that uses a CP2104 to convert the serial data to a USB peripheral. You would need a serial one to hook to the serial port on a Teensy.
Ah shame, I was hoping I could somehow get the original serial out. Time to order another one!
Think this one would work?
https://learn.adafruit.com/adafruit-ultimate-gps-featherwing

Adafruit Learning System
Where are your Feathers at? Now you know!
Yes, that one does provide serial data. https://learn.adafruit.com/adafruit-ultimate-gps-featherwing/pinouts
Thanks!

Pulse Sensor Amped is a greatly improved version of the original Pulse Sensor, a plug-and-play heart-rate sensor for Arduino and Arduino compatibles. It can be used by students, artists, ...
I was trying to connect this pulse sensor to a adafruit feather stm32 and I am having some issues with it
The sensor turns on and in the library it asks for a G0 pin because the library is designed for an arduino board but I don't have one but I am still using arduino ide to upload and I went into the libraries' c++ file and changed that pin to A0 to match it on my board but it is just not working
When you say "just not working", what do you mean? Do you get an error? Do you get a weird reading? Does something else happen?
No serial data shows up on the serial monitor even a basic print statement
Which code are you using? The starter project doesn't print anything.
Like this one? Do you have the data rate set properly? https://github.com/WorldFamousElectronics/PulseSensorPlayground/blob/master/examples/PulseSensor_BPM/PulseSensor_BPM.ino

GitHub
A PulseSensor library (for Arduino) that collects our most popular projects in one place. - PulseSensorPlayground/PulseSensor_BPM.ino at master · WorldFamousElectronics/PulseSensorPlayground
GitHub
A PulseSensor library (for Arduino) that collects our most popular projects in one place. - PulseSensorPlayground/Getting_BPM_to_Monitor.ino at master · WorldFamousElectronics/PulseSensorPlayground
this one
Ok it does do basic print statements but there are no beats being registered
Presumably the library does sampling and processing to look for beats and isn't seeing what it expects? Is it hooked up correctly? You could try this one (which says it supports the STM) to possibly get more information https://github.com/WorldFamousElectronics/PulseSensorPlayground/blob/master/examples/PulseSensor_BPM_Alternative/PulseSensor_BPM_Alternative.ino
GitHub
A PulseSensor library (for Arduino) that collects our most popular projects in one place. - PulseSensorPlayground/PulseSensor_BPM_Alternative.ino at master · WorldFamousElectronics/PulseSensorPlay...
I believe so I mean it is only 3 pins. One in 3.3v, one in ground, and one in the A0
I will give that sketch a shot
I'll normally make a quick sketch that just reads A0 and sends the value to the serial port as a check that I'm getting data, and what the range of values looks like. It looks like that library does a lot of internal processing and may be expecting something in particular, but I haven't looked into the details.
The sketch you sent me is working so far so thank you
I am trying to use a feather stm32's built in sd card and the program is failing to intialize my sd card. I am using the read and write example from the stm32duino stm32SD library
I'm running ESP32 2.0.0 from board manager and trying to upload Arduino code to Adafruit Funhouse, but I consistently fail with the error msg: File "serial\serialwin32.py", line 222, in _reconfigure_port
serial.serialutil.SerialException: Cannot configure port, something went wrong. Original message: OSError(22, 'A device which does not exist was specified.', None, 433)
[25636] Failed to execute script esptool
. I've read through all the Adafruit guides for ESP32-S2, but none of the material covers this. Any advice would be appreciated. The device does should up consistently as COM10 (Adafruit Funhouse)
Hello! I had a quick question. I am planning to use a 12V 5A power supply to power two TB6600 motor drivers in parallel for some NEMAS. I was also planning to power the microcontroller with this power supply as well. So my question is, what should I do to make sure I am supplying the correct amount of power to the MCU? I have a DC barrel jack soldered onto a protoboard with the 2 drivers connected to it in parallel btw, should I just use a fat resistor to step down the amperage for a connection to the MCU?
No need to "step down the amperage", the MCU will draw what it needs. However, the motors will tend to create electrical noise on the power supply line, so you may want some isolation.
ah, so a small capacitor or smthn to smooth out the noise?
Note that you may want to step down the voltage, depending on the type of on-board regulator the MCU has.
Note: NEMA is not a type of motor, it's a series of frame sizes.
the MCU is rated for 7-12v, so i think It should be able to take it without voltage reduction
its a NEMA 23 with a 50:1 gearbox, not sure of specifics
tying in with this, what would you recommend to mitigate electrical motor noise?
I think that adding a voltage regulator between the power supply and the MCU to bring the voltage down from 12V to 7-8V woudl help not to overload the MCU (if it is designed for 7-12v, feeding it 12v is pushing it) and also help with electric noise
I can't connect to the selected COM port
The Magtag docs have most of the solution. I found that by pressing the Reset first, then pressing and releasing Boot, then releasing Reset, the Funhouse will expose the correct COM port. Then reset again after programming per the MagTag instructions
About how much current does a Feather M4 draw?
I want to get a voltage regulator for my project but I don't want it to melt lol, stepping 12V down to 5V with anything higher than like 250mA of draw will not end well
Use a DC-DC converter if you don’t want to worry too much about thermals
There are plenty of great options on the adafruit shop

This little buck converter based on the MPM3610 is a marvel, taking up to 21V input and providing a 5V output with up to 1.2A current. It's great for supplying power to popular 5V ...
Thanks :)
I am hoping to create a bluetooth mouse HID device using Nano RP2040 Connect. It doesn't seem there is any HID API built-in to ArduinoCore-mbed or any example on how to do it.
I was able to make it appear as a bluetooth device to my windows 10 computer using ArduinoBLE library but I can't figure out how make it appear as HID Mouse device and then pair. I can't seem to figure out the pairing process. Is there the functionality for Bluetooth HID Mouse using Nano RP2040 Connect? It's technically not an Adafruit product but I didn't get any answers through Arduino forum or github page. I would appreciate any help.
Hello, I'm trying to make a Bluetooth mouse with Arduino. However, I had an issue with https://github.com/adafruit/Adafruit_nRF52_Arduino/tree/master/libraries/Bluefruit52Lib library. I have too much latency with mouse.move(). I have a board with nRF52840.
I use this website to measure mouse latency https://www.vsynctester.com/testing/mouse.html
I tried my USB, Wifi, and Bluetooth mice. All of them have around 60 mouse events / sec. But my Arduino mouse has only 30 per sec.
I copied this example: https://github.com/adafruit/Adafruit_nRF52_Arduino/blob/master/libraries/Bluefruit52Lib/examples/Peripheral/blehid_mouse/blehid_mouse.ino
The only difference is the loop function. I have just
void loop()
{
blehid.mouseMove(10, 0);
blehid.mouseMove(-10, 0);
}
How can I improve its performance? Ideally, I would like it to be as fast as my Bluetooth mice. Thank you!

no dice
no?
I remember there was something weird about it not including files that weren't "part of the sketch" (which basically means loaded in via the menus as another file concurrent to the main file)
I think in the menu there's something along the lines of "add file to sketch"
Not at a computer at the moment to check
That seems to do the trick
Okie doke glad to help

Hmm... I'm not sure on this one, but silly question, is it a board with default support or something you had to add support for? If the latter is there a chance you missed a step?
add support, I can check right quick
It almost sounds like some definitions or standard library stuff for the board is missing
Could even be an arduino IDE incompatibility with that version of the board's libs
I've had issues with that before, mostly on Teensy
(and 3D printer boards)
I'm following an Instructubles guide

Instructables
ESP8266 Weather Widget V2.0: Welcome to my new Weather Widget Project. Earlier I have posted an Instructables on the weather widget, that uses a 0.96" OLED display to display the weather parameters. The main problem in the earlier version is that the display is very small …
Using the same stuff as him.
I'll keep trying
Can anyone take a look at this, I dont know what the issue is after some googling.
this is failing to compile for the board itself, the for this is recent enough though.
have you attempted to re install the arduino IDE?
or install the new pro IDE?
No, I havent
I would give that a shot as it would be a fast way to double check
if it was a lib failure, it would comment on the libs, but its failing with the board... so 1) the libs you are using are not for that board, 2) the board you installed is not the right one, or 3) arduino IDE throwing a fit would be my first 3 suspects
It's only directing me to the microsoft store version
while you can download that and use it, you can also just download the executable from the site
or


also if you scroll down there is the 2.0

I found it, I'm checking now
Arduino: 1.8.16 (Windows 10), Board: "Arduino Uno"
esp8266-weather-station-color:31:10: fatal error: ESP8266WiFi.h: No such file or directory
#include <ESP8266WiFi.h>
^~~~~~~~~~~~~~~
compilation terminated.
exit status 1
ESP8266WiFi.h: No such file or directory
This report would have more information with
"Show verbose output during compilation"
option enabled in File -> Preferences.
Its always something new
Both versions are having the same issues.
and this happens when you compile and not upload?
Yeah
if that is the case this has to be a issue with the libs you installed or the libs being used.... I would double check the libs used because there are often times libs spelled very similarly but choosing the wrong one will lead to this sort of thing
I’ll do my best, i can always try a reinstall of everything.
I followed the instructibles instructions to the best of my ability and followed alone nearly identical.
and you also selected the correct settings for the board itself? I see you have 80 MHz, Flash, Disabled in the top line there
I would have to check, I’m taking a break so I can work on homework. I’ll check soon.
I have tried on 2 different devices, neither have worked successfully.
hmmm..... I would try to make sure you downloaded the correct board linked? or I would attempt to test out each lib compiling for that board. those libs usually come with example code samples, I would load them each and compile for the board to see if one of them ends the same way
but if you have homework do that first XD
Hi there I’m pretty newbie. I want to know if I can secure my radio transmission between 2 Arduino boards using the end to end encryption ?
Sure. You probably want to avoid public-key cryptography on a lightweight microcontroller, but there are plenty of symmetric-key ciphers that would be suitable.
Thanks can you provide me an exemple or link ?
The RadioHead library supports encryption, you could use that, or grab the encryption code from it to use elsewhere. https://www.airspayce.com/mikem/arduino/RadioHead/
im trying to use like a 868mhz remote control with an arduino, but im not sure what kind of an extension to the arduino board should i look for, to have it be able to receive signal at that frequency
the remote control itself also has a label of rt21, not sure what that means
would a RFM69HW be good enough for this sort of project
It depends somewhat on the modulation scheme, but yes, that should be able to receive it.
Hey guys, i got a small issue and i cant figure out whats going on
I have a Ublock Neo GPS Module (GY-GP6MV2) and i am connecting it to a NodeMCU.
This is my pin layout
GPS -> NodeMCU
VCC -> 3V
TX -> D2
RX -> D1
GND -> G```
Now, yes, i also tried to connect the TX->RX and RX->TX that didnt work either. With this simple sketch
#include <SoftwareSerial.h>
#include <TinyGPS++.h>
SoftwareSerial gpsSerial(1,2);
TinyGPSPlus gps;
float latitude, longitude;
void setup(){
gpsSerial.begin(9600);
Serial.begin(9600);
}
void loop(){
while(gpsSerial.available()){
int data = gpsSerial.read();
if(gps.encode(data)){
latitude = (gps.location.lat());
longitude = (gps.location.lng());
Serial.print("Latitude: ");
Serial.println(latitude);
Serial.print("Longitude");
Serial.println(longitude);
}
}
}
Im getting nothing, only this once when i open the serial monitor:
You may need to send it something to get it to power up and enable the output. Also, the characters in the serial monitor look to me like a rate mismatch. Many GPS units default to 4800bps. I'm unclear on whether gps.encode() is doing what you want here.
thing is this is from a tutorial haha and it has the same script, im so confused.
I also checked the website where i bought the GPS from, and they say its Default Baudrate is 9600
Even if the GPS is screwing up, you should still see the "Latitude" strings in the serial monitor instead of garbage. So there seems to be something wrong with the NodeMCU-to-PC connection. Maybe a bad clock config somehow?
well what i do find weird
The NodeMCU got this blue power led
when i disconnect the GPS module, the LED goes back on, but when the GPS module is connected, the NodeMCU led turns off ?
also find it annoying that this GPS Module has no power LED lol
hmm weird, as soon as i touched the antenna it started to display the lat and longitude
its all 0.00 but i think thats cuz im inside lol
yeah when i touch the antenna it starts to display stuff in the loop
but when i release it, it doesnt do anything in the monitor lol
Sounds like a wiring/connection/power issue
ayyy maybe i left the soldering iron too long on the board :/
Yeah, sounds like maybe a disconnected ground or something like that.
🙃



You'd want to use antennas labeled as specifically for GPS, since it uses a different frequency band than GSM cellular or WiFi.
I saw that this gsm module can operate at range 500-1900 MHz. GPS frequency is not included inside that range ?
I mean, you can try it. You can also try a Pringles-can antenna. But if you want a good GPS signal, you're better off using a GPS antenna... 😉
Thanks
I want to make a DIY drone but I’m confused with two motors
1000kv/13T and 2200kv/6T brushless both outrunner motors I don’t know which to choose
It depends on your power supply voltage and type/size of propeller
https://wiki.seeedstudio.com/Seeeduino-XIAO/ if you go to this wiki page and scroll all the way down to the getting started section, you can find a step-by-step procedure to using a XIAO wit arduino.
Seeed Product Document
More specifically, you can find the JSON file to add the board definitions to Arduino here: https://wiki.seeedstudio.com/Seeed_Arduino_Boards/
Seeed Product Document


Possibly because the workspace path points to somewhere that isn't there?
11.1v 3s 30C 2200mAh lipo battery pack
I will choose propellers after the motor. What I need is polyvalence but specifically stability for pictures
so this should work right? because for me it doesnt

What do you mean by "work"? None of the potentiometers have their central wiper terminals connected to anything, so they'd just be fixed resistors between power and ground.
i just took the analog pin out to make it easier to see the diagram i am actually talking about
When you say "can't let that happen," what exactly is the problem that occurs?
It looks like the power rail is hooked to GPIO 6 instead of a power pin, and ground is hooked to ... a mounting screw?
Does anyone know if I can use Hardware Serial on an Atmega32u4 and USB serial at the same time for debugging? I’ve got a Pololu 3Pi+ I’m trying to add an iBus receiver for but I’m just getting nothing on the receive.
Yes, the 32U4 has both USB and UART serial. The usb should be Serial and the UART should be Serial1
Thanks, that’s what I thought. Not sure what’s going on with the receive. I put power and ground in, then the signal out from the receiver to the RXD1 pin and I see no data. On my Arduino Mega with Serial2, I read it without issue.
anyone successfully had a QT Py RP2040 working as-expected under Arduino using the earlephilhower/arduino-pico core?
like it technically works, but the pin mappings don't seem to, so like i can't just do pinMode(2, OUTPUT); and have it set pin 2 denoted by the board's silk to an output, i had to check on this picture to get what actual pin numbers are mapped to which broken out GPIOs https://cdn-learn.adafruit.com/assets/assets/000/101/678/original/adafruit_products_QTRP_sch.png?1618955879

so like to get what's labeled as pin A2/D2 to wiggle some bits, i have to use, for example, pinMode(27, OUTPUT);
and i'm almost positive it just works without any weirdness or inconsistency on my MacroPad RP2040 and my Feather RP2040
the feather D pins don't always match with the GPIO numbers either, though some do (like D9-D13)
well i mean trying any of the defines like A2 or D2 doesn't get it either
i'm returning to a project i wrote back in January. Updated all libraries. Now I'm getting a few errors in libraries, such as this one:
C:\Users\rblin\OneDrive\Documents\Arduino\libraries\Adafruit_SPIFlash\src/esp32/Adafruit_FlashTransport_ESP32.h:34:3: error: 'esp_partition_t' does not name a type
esp_partition_t const *_partition;
yeah I don't know anything about board definitions in the earlephilhower arduino core, and these boards are missing a proper pinout card, but you can use the circuitpython pins.c as a reference that's likely easier to read/parse (than the schematic), it matches the silkscreen to the chip's GPIO pins
https://github.com/adafruit/circuitpython/blob/main/ports/raspberrypi/boards/adafruit_qtpy_rp2040/pins.c
https://github.com/adafruit/circuitpython/blob/main/ports/raspberrypi/boards/adafruit_feather_rp2040/pins.c
nevermind, checking out variants/generic/common.h i can see the problem
for that core, i mean
apparently i thought i tried and got the same result for A2 and D2 but i must not have
static const uint8_t D1 = (1u);
static const uint8_t D2 = (2u);
static const uint8_t D3 = (3u);```
```static const uint8_t A0 = (26u);
static const uint8_t A1 = (27u);
static const uint8_t A2 = (28u);
static const uint8_t A3 = (29u);```even though the silk and the docs on the QT Py RP2040 says that Ax and Dx pins are the same, in the definitions for it on that specific Arduino core, they're mapped to different GPIO on the chip
so i guess the fix is to just always use A0-A3 for those
anyone knowledgeable about lvgl? i'm having trouble getting font references to build... for instance, if I have lv_font_montserrat_12, it tells me it's not declared, and suggests using lv_font_montserrat_14. changing lv_conf.h doesn't seem to do anything... both 12 and 14 are defined as 1. Even if I set 14 to 0, it still suggests it.
it used to work, 9 months ago.
but after updating libraries (and downgrading to lvgl 7.11) it doesn't work
Can you use the feathers with normal arduinos? I have an Adafruit motor featherwing, and im trying to control a stepper motor but my base is a normal arduino uno. what needs to be setup to use it?
it's supported with the Arduino IDE, you should start there for the software https://learn.adafruit.com/adafruit-stepper-dc-motor-featherwing/arduino-usage
The wiring requires powering the board with the logic power pins and connecting to the I2C pins for communication, and it should work. The pinout in the guide shows the pairs, but doesn't seem to indicate which pin is power vs gnd or sda vs scl, but you can compare to a feather pinout https://learn.adafruit.com/assets/96531
oh, but it takes 3V logic, you might need a level shifter
the uno has 3.3v output
will that work?
im just trying to get the default code from the motor shield v2 library working rn
actually the PCA9685 is indicated as being 5V compatible
I have it plugged in via the 3.3v, as well as the SDA and SCL are plugged in
I have gotten it to work. I had it on the wrong motor. Thank you for the help.
that is just as like a placeholder image it would normally be an Esp32 and the red wires are the voltage/3.3v and the black wires are ground
exit status 1
invalid conversion from 'void ()()' to 'void ()(int)' [-fpermissive]
This report would have more information with
"Show verbose output during compilation"
option enabled in File -> Preferences.
whats this
It looks as if the code is calling a routine that expects no argument, with an argument.
Or in other words, the receiveEvent() function should take an integer parameter, but it seems to have been defined without one.
Thank you, that's more accurate
It'd be defined like:c void receiveEvent(int numBytes) { // do something with the event }
Open-source electronic prototyping platform enabling users to create interactive electronic objects.
Which saves more space in arduino:
(a) define 4 variables or (b)define an array of 4.
also what data type is suitable for storing microseconds for micros()?
It'll depend a bit on the variable type, but generally the array will either be the same size or slightly smaller. However, it's generally not worth optimizing things to that extent to save a few bytes... prioritize code readability first, especially if the variables aren't really related to each other.
micros() returns an unsigned long.
The Arduino programming language Reference, organized into Functions, Variable and Constant, and Structure keywords.
Thanks. I will be using unsigned long.
The reason I ask is because I have a large array that is too big to upload into arduino uno so Im experimenting different things for better space complexity.
If it's constant data, you should also look into PROGMEM if you haven't already. https://www.arduino.cc/reference/en/language/variables/utilities/progmem/
The Arduino programming language Reference, organized into Functions, Variable and Constant, and Structure keywords.
do i just copy paste it in but change the "// do something with the event"
?
i tried it and now it says this:
'requestEvent' was not declared in this scope
ping when responding
@sweet holly I thought it had been receiveEvent, why is it changed to requestEvent?
Apparently you'll have to define requestEvent?
isn't it defined already?

I don't know about ir but the error message says you're referring to requestEvent without defining it.
i mean't "it" lol
no ir
isn't the code above the red marked spot the definition?
No, that's the reference: it's trying to use it there.
The compiler requires that you create something before using it.
The definition is what creates it.
Is it possible to "overclock" the circuit playground classic in arduino?
Hello everyone, I'm having issues with the LSM6DS33+LIS3MDL breakout on an Arduino Uno
I'm using the example code on the website, https://learn.adafruit.com/st-9-dof-combo/arduino
Here's the message I get in the serial plotter: Adafruit LSM6DS+LIS3MDL test! Failure to find LIS3MDL chip


Adafruit Learning System
Get moving with so many forms of 9-DoF motion sensing!
I made sure the correct breakouts in the code were uncommented, and all libraries and the Arduino IDE are all updated as well
can you post photo of actual setup?
Will do, as soon as I get home from work
What is my issue?
I've been fighting for days.
https://www.instructables.com/ESP8266-Weather-Widget-V20/
This is the project guide I'm following
Instructables
ESP8266 Weather Widget V2.0: Welcome to my new Weather Widget Project. Earlier I have posted an Instructables on the weather widget, that uses a 0.96" OLED display to display the weather parameters. The main problem in the earlier version is that the display is very small …
Looks like an undefined reference in WString.h

Tried to get the best angle for this, let me know if there's anything else you need!
I have one button wired to 14, another to 13, and both to the same ground pin. I'd expect this code to turn on the LED if either or both buttons are pressed, but it's only doing so if both buttons are pressed. ... Am I confused about how || works?
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
}
void loop() {
delay(100);
bool red = digitalRead(13) == HIGH;
delay(100);
bool blue = digitalRead(14) == HIGH;
if (red || blue)
digitalWrite(LED_BUILTIN, HIGH);
else
digitalWrite(LED_BUILTIN, LOW);
} ```If I disconnect one of the buttons, I can't get the LED to light anymore. I'm using a Huzzah, in case the GPIO pins have still more surprises. (I initially connected one of the buttons to pin 15, which doesn't have a pullup.)
Okay one thing is the button is pressed when low because pullup. Whoops.
The other is the Huzzah LED is inverted.
Here is the fixed code ```#include <Arduino.h>
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
}
void loop() {
delay(10);
// INPUT_PULLUP buttons are LOW when pressed.
bool red = digitalRead(13) == LOW;
bool blue = digitalRead(14) == LOW;
// Huzzah LED is on when LOW.
if (red || blue)
digitalWrite(LED_BUILTIN, LOW);
else
digitalWrite(LED_BUILTIN, HIGH);
} ```
@tepid oxide thanks for photo. that all looks ok. it's interesting that it's only failing on one of the sensors. try running this i2c scanner and see if it finds both addresses:
https://playground.arduino.cc/Main/I2cScanner/
revisiting a project that utilizes this idea; I want to follow this project's tutorial, but instead of one eye it'll be two and I'd like to do it with adafruit's mini matrices
https://www.adafruit.com/product/860
any idea of what parts to buy and what modifications should be made to the provided code?

You will squeak with delight when you hold this adorable miniature LED matrix. 0.8" square, it's got everything a big LED matrix has, but bite sized! 64 bright yellow LEDs are ...

Arduino Project Hub
Use an infrared sensor to sense eye movements and control an LED. By HomeMadeGarbage.
The parts I already own are an adafruit FLORA (https://www.adafruit.com/product/659), the reflectance sensors (https://www.pololu.com/product/2458), and some female headers

The QTR-1A reflectance sensor carries a single infrared LED and phototransistor pair in an inexpensive, tiny 0.5" x 0.3" module that can be mounted almost anywhere and is great for edge detection and line following. The reflectance measurement is output as an analog voltage. This sensor is sold in packs of two units.
I'm new to arduino but understand the main basics of coding, so I thought this would be somewhat doable to do as a beginner with some help along the way whenever I'm stumped
All I'm getting is a continuous scroll of question marks
Never mind! I changed baud rate to 9600 and got the following: I2C device found at address 0x1E I2C device found at address 0x6A
@tepid oxide you're getting 0x1E for the LIS3MDL for some reason. it's default is 0x1C
that's the alt address:
https://learn.adafruit.com/st-9-dof-combo/lsm6ds33-lis3mdl-pinouts#i2c-address-pins-3065024-4
did you solder the jumper on the back?
Nope, the only solder on the board is on the pins
something else may be shorting it

do you have a multimeter?
I do
with the breakout removed, like in above photo, do a continuity check between the ADM pin and the VCC pin

also check between ADM and 3Vo

500 between ADM & VIN; 330 ADM & 3VO
ohms?
yes
that's close enough to shorted that it's changing the address
in that case, should I just solder the jumper? And would I have to change anything in the .h file for the sensor?
lis3mdl_success = lis3mdl.begin_I2C(0x1E);
^^ one simple change in the example sketch
try that before doing anything else. see if it works normally once you specify the other address.
post another photo like above, but flipped over. can take a look for anything obvious that might be causing the short.


Top right soldering is laughable, but not bad enough to cause any problems like this 😅
maybe?

your soldering looks fine in general
gibberish was me going back to 115200 baud

do the i2c scan again

ok, go back to example sketch but make the code change to set the other address
LIS3MDL to 0x1E
LSM6DS33 to 0x6A?
can leave the LSM6DS33 as is
lsm6ds
just the one change:
lis3mdl_success = lis3mdl.begin_I2C(0x1E);

not sure why the alt address is being set. but at least you have a work around.
seems like a similar problem
yah. it does.

maybe it wants a direct connection vs. through a resistor?
you could do something similar if you wanted, i.e. short that pin to GND to bypass the 10k resistor
that'd get you back to the 0x1C adddress
i just hooked one up to an UNO and i'm getting 0x1C
weird issue. the discussion in that thread seems good.
sorry, which pin exactly?
the ADM pin
it's connected to GND through a 10k resistor
apparently, based on discussion in that forum thread, that may not be working 100%. i.e. it needs to be a short, not via a 10k resistor.
so by adding your own short, you'd bypass the 10k
Okay, yea I got it now. and hanks again, I really do appreciate it
*thanks
np. glad it's working. weird issue. sry you ran into that.
Hi, Can someone explain to me what exactly does a Switching convert Power adapter do ? (i.e. https://www.amazon.com/gp/product/B01E6RMASC/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1)
and What kind of led strips do I look for because Im doing a project to programatically change the color of lights?
Context: project involving visual/more interactive way to play midi files.

LEDMO Switching Converter, AC/DC Power Supply Adapter Transformer Driver for LED Strip Lights, AC 100V/240V to DC 12V 10A 120W LED Strip Light Power Supply Switching Mode Converter
A switching converter is just a kind of power supply
@waxen hawk They just throw in extra words because they don't speak English.
There are AC to DC converters and DC to DC converters.
If it's not a linear power supply, it's a switching power supply. Linears weigh a lot more because they use transformers in them.
DC to DC converters are pretty much always switching types.
Sort of: most switchers also have transformers: however since the switching frequency is much higher than the mains frequency, the transformers can be smaller and lighter.
having a hard time trying to figure out what atmega chip is arduino compatible. should any ATmega328p be compatible? im looking at the schematic for the arduino nano and it says it uses a 328p-mur, but that part number seems to be a different package than the one thats actually on the board.
The original Arduinos had the DIP packaged chip, but some versions have a much smaller surface mount version.
The Nano would have one of the smaller packages
Anyone know how I would create a time_t variable from a string 2021-09-16T10:11:17.709845+00:00
the question I guess I'm asking is, can the arduino IDE compile code that will work on any of the different packages as long as they are 328p's or do I need to hunt specifically for a -mur -au, or etc.
The code should work on any of the packages. There is a -B version that's slightly different (it has a second UART, among other things), but the other packages should all be interoperable (probably the same silicon inside).
okay, thanks a bunch!
Can i use 5v sensor with 3.3v esp32?
i have this turbidity sensor that i want to use with the esp32, also if i use the voltage divider i don't know how will i be able able to calculate the values in NTU Which is the unit used for measuring turbidity, Can anyone please help?
https://www.dfrobot.com/product-1394.html
The turbidity sensor detects water quality by measuring level of turbidity. It is compatible with Arduino via Gravity interface.
For a low-precision application, a simple resistor divider might suffice. If there was a schematic, I could say in better confidence if it would work or not, but it's likely you'll need an op-amp circuit to buffer the voltage prior to a divider for impedance concerns.
Sorry, did not see your concern with your voltage divider calculation. If you know your resistances, you can calculate a fixed ratio to multiply your result by.
Vin______/\/\/\________/\/\/\______GND
R1 | R2
|
| Vout
Given such a divider, you can multiply the Vout reading by (R1+R2)/R2 to obtain your original values.
Easiest way to manage this would be to use two resistors of equal resistance, and multiply your resulting voltage output by 2.
I am trying to use a feather stm32's built in sd card and the program is failing to intialize my sd card. I am using the read and write example from the stm32duino stm32SD library

Adafruit Learning System
ST takes flight in this fantastic Feather board with STEMMA QT
This is the board I am using
How was the card formatted?
I formatted it using my phone. Unfortunately I lost my microsd card reader so I am using my phone till I get another
I don't know if it matters but I am using this card

Might be too big of an SD card, 128G is usually formatted as exFAT, which doesn't always play nice with microcontrollers...
Ok well I have some smaller ones that I can try
A smaller FAT16 or FAT32-formatted card might work better
Yeah, according to https://www.arduino.cc/en/Reference/SD, The library supports FAT16 and FAT32 file systems on standard SD cards and SDHC cards.
Open-source electronic prototyping platform enabling users to create interactive electronic objects.
I am not using the default sd card library
It's probably safe to assume the STM32 library has a similar restriction.
Formatting the 128GB card with a smaller partition might work too, but you need an OS with a better formatting tool
Actually, upon closer inspection, the FATFS library the STM32 lib is built upon does have ExFAT support, but it may require additional configuration
Well I found an 8 GB one that works like a charm. Thank you for your help !
Stumped … trying to do a FM Radio Ardunio sketch … keeps saying si4721.h no such file or directory
im tinkering with an esp8266 and i was wondering if it is safe to just unplug it from my pc to make changes to the breadboard wiring
since it has no console that i am aware off
(reposting since it got lost in the channel)
revisiting a project that utilizes this idea; I want to follow this project's tutorial, but instead of one eye it'll be two and I'd like to do it with adafruit's mini matrices
https://www.adafruit.com/product/860
any idea of what parts to buy and what modifications should be made to the provided code?
The parts I already own are an adafruit FLORA (https://www.adafruit.com/product/659), the reflectance sensors (https://www.pololu.com/product/2458), and some female headers
I'm new to arduino but understand the main basics of coding, so I thought this would be somewhat doable to do as a beginner with some help along the way whenever I'm stumped
You will squeak with delight when you hold this adorable miniature LED matrix. 0.8" square, it's got everything a big LED matrix has, but bite sized! 64 bright yellow LEDs are ...
Arduino Project Hub
Use an infrared sensor to sense eye movements and control an LED. By HomeMadeGarbage.
The QTR-1A reflectance sensor carries a single infrared LED and phototransistor pair in an inexpensive, tiny 0.5" x 0.3" module that can be mounted almost anywhere and is great for edge detection and line following. The reflectance measurement is output as an analog voltage. This sensor is sold in packs of two units.
If you're not in the process of writing data, it should be fine.
okay thanks
Switching the display from addressable RGBs to a monochrome LED matrix means you basically have to rewrite all the graphics methods from scratch. The reflectance sensors are 5V devices so they're not super easy to work with using the FLORA, unless you have the right level shifters on hand. It's certainly far easier to use with an Arduino pro micro, but the SPI on Pro micro means you may be only able to drive one MAX7219 driver per.
Thanks, Thanks for this cool diagram as well
So, doing a lab that involves building a resistor circuit, measuring voltages at certain nodes with a multimeter and with the analog pins on the arduino. The voltage from the arduino would be x/1023 * 5. Getting some confusing results though- sometimes, it matches the multimeter, but sometimes it is way off. I'm just running a wire from A0 to the node in the circuit and doing an analogRead- is this not the right way of doing it?
It is, assuming they share the same ground reference. If the multimeter and arduino have a common ground reference, there should not be any way-off instances.
If the analog signals are variable non-DC values, your DC multimeter can also sometimes give funky results.

Currently reading 855 on the arduino, for 4.18 volts, if I put my multimeter on the ground rail and the exposed bit of the yellow jumper wire, it reads 2.56 volts.
voltage source is the 5v pin on the arduino which should be smooth DC
Swapped the Arduino, same results
Can you measure the 5V pin on the arduino with the multimeter?
5.01
You wouldn't have an internal pullup enabled, would you?
I don't think so, I did pinMode(A0, INPUT);
So some measurements are dead-on, while others are off by over a volt?
That IS weird...
i think you can skip pinmode for analogreads
what's an example of a reading the does agree?
Would it be better then to just get what's listed on the project's list and simply modify the code to account for 2 eyes instead of one? The LEDs will be attached to the inner section of a visor, sort of like these

(replica of one of the daft punk heads)

Maybe have the only thing replaced being the arduino because I do have an arduino uno

the reason i initially was considering small matrices is because I don't know how effective it would be to use LED strips instead for such a project and/or if it'd be more tedious for a beginner compared to using a matrix. The LEDs would be programmed to be like the first image's eyes; They'd be only half-circle eyes that move in sync with my real ones
I have my visor designed removable for if i ever need to repair something and/or just need to pop it off so i can easily eat/drink when wearing it and wandering around conventions
hey folks, I am trying to set up an esp8266 to control my w2812b led strip but I'm getting peculiar results. I'm using an example script from the FastLED library and it's supposed to cycle between different effects. But instead, I am getting this blinding white flicker. Could it be a problem with my circuitry? I have an external 5V power supply injected and grounded into my led strip and im using its ground on my breadboard aswell, instead of utilizing the gpio ground pin (is this what 'common ground' means?)
I should also note that I have a jumper wire connecting my led to a 3.3V pin on the esp board. Is this bad? I couldn't find much information on how to hook everything up properly with my particular setup. I also don't want to experiment on my own anymore because I think I just killed one of spare led strips trying to figure this out :/
You will want to connect your ESP ground to the strip/power supply ground (it is unclear to me what the breadboard ground is connected to, so you may have already done so). Additionally, you will want to configure the library to the same color space as your strip (for example, if you have an RGBW strip and the library is configured for RGB, you can get behavior like this).
Are you level-shifting the data line?
no, I had a resistor between the data pin and the led strip's data but then the lights would not turn on. Do you have a resource that goes in depth about this?
something like this? I wasn't sure if I should hook up the led's bare ground wire into the terminal connector and have the other plugged into the breadboard.
I should also mention that my esp is plugged into my computer via usb, I don't assume that would be the grounding issue?

oh it works!!
thanks guys 👍 though i would love to know if there's a way i can improve the circuit
There’s a really captivating article on Tweaking4All illustrating the various effects (firelight, bouncing-balls, chasers, etc) that can be easily reproduced with the common WS2812, addressab…
You may want to ground the ESP through the ground lead on the data connector instead of doubling up on the power connector.
i appreciate the help. i have cleaned up the wiring for the most part :)
Anyone here use PlatformIO with their boards? Not sure the correct place to post this question. Using the Arduino framework and Adafruit M0 and M4 boards. Using the Arduino IDE sprintf worked. With PlatformIO, I get empty chars back. I am trying to put numbers on TFT’s and getting them into chars to write to the TFTs has been hella frustrating.
Anyone got any exp with CheapDuinos? I'm trying to find out how to wipe them, anyone know?
I want to wipe it because I keep getting an upload error and I'm wondering if I just need to wipe it first?
Essentially a USB upload always wipes it. If you're bootloader is funky you'll need a ISP to reprogram that (assuming it has ISP headers)
Oooh just looked it up. Neat little boards

Morning all. This is to do with MQTT and the adafruit lib. I need to have retained messages for a little esp 8266 project. There is a pull request that is open to add support for retained messages. The current installed version in arduino does not have this change. What can I do to make this happen? 🙂
Added support for retain on publish #56
@turbid iris I had this issue recently with a radio library that didn’t support the M4. Is there a branch that has the code you want? You can download that branch and put that version in your libraries folder instead.
I figured it out. The PlatformIO folks have it disabled in the linking phase to reduce resources. You can enable it with “build_flags=-Wl,-u_printf_float” This is poorly documented.
@livid holly I've hacked my local copy for now. Works. Just jammed the flag in all the time. 🤫 Although it's reinventing the wheel, I fancy writing my own as an exercise. 🙂 Write it from the specs. See how close I get. I did simular for a JSON lib, it was a nice two weeks coding.
Hi all, bout to run my first uno r3 board test for LEDS
Is the code for uno different then an adafruit feather?
I'm trying to test code for a part of a ray gun project on what parts I have right now
I've been itching for practical applications!
code should be the same , except for a couple of chip-specific libraries like Neopixel DMA (only works on SAMD21, SAMD51 boards)
and of course, remember that UNO is 5V, whereas Feathers are 3.3V
so for driving neopixels, Uno is actually easier - no level shifters needed
Ya know… funny thing.. I drive Neopixel with 5V power and 3.3V data lines 😆
I know, it mostly works, but I had some problems with it before
Interesting, I’ve not encountered issues but maybe I’m lucky. I’m sure there is potential for problems
BTW: I was trying to find what is the acceptable voltage range for SK6812
datasheet says "5V" and that's it
do you know if one can reliably use them with 3.3v power?
or with higher voltage, like 6V?
@gilded swift ?
no issues with that?
They are running 1 neopixel so generally permissible
That data sheet should be mostly applicable to the 5050 variety
3.5-5.5V
The samd21 and rp2040 can technically handle 3.6V through their GPIO
Since that’s the max input range for their supply pins
I am confused.. I look at schematics for QT Py and it shows that neopixel Vcc is connected to one of the SAMD21 pins, not to 3.3V rail
Right
That’s what I was saying, they power the single neopixel on the samd21 pin
Same on the qt py rp2040
They do that so you can disable power to the neopixel
for power saving
Yeah
well, it depends on LDO current limit, but in any case, I am lookign to power just 2
Yeah, make sure the LDO has a max output up to 3.6V
even though datasheet says 3.5V?
Yeah, just to be safe
well, I was thinkign of using 3.3v ldo
I am not even sure 3.6v LDO exist
QT Py uses 3.3v LDO
Oh, I see
Thanks!
More than likely, any answer to this question will be beyond the scope of my understanding. I’m trying to use a PIR sensor to detect motion and turn on a single neopixel to run Pacifica from the fastLED library for 10 minutes. I’ve tried “while”, “if/else”, and have started venturing into “millis” and “every_n_minutes”. I’m sure it’s simple, but my skill level isn’t there yet.
Generally you're looking at a "state machine" sort of architecture, where your code is deciding when to change its state based on various inputs, including the time. For an untested example:c long turn_on_time = 0; int led_on = 0; void loop() { if (led_on) { // See whether it's time to turn it off yet if (millis() > turn_on_time + 10*60*1000) { // Turn off the NeoPixel led_on = 0; } } else { // See if there's any motion yet if (PIR_sensor_triggered()) { // Turn on the NeoPixel led_on = 1; turn_on_time = millis(); } } }
Thank you! I'll try it out. I had read about state machines and it sounded like I was on the right path, but I was struggling to find a simple example combining it with using a sensor.
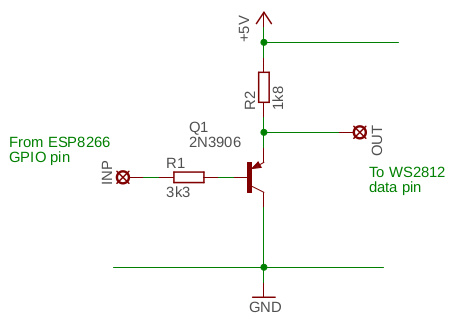
It works, except when it doesn't...
A PNP and a couple resistors never fails though
Good evening innocent .
excuse me .. I'm trying to program ATMEGA328 with FTDI and TTL adapter but always have this error

this is my ATmega328 circuit it use 16MHz crystal with 22pF capacitor

I'm using this ftdi and ttl


so what I'm doing wrong .. and is there any other way to do it
Could be a voltage issue (3.3V vs 5V), speed issue, programmer type/bootloader issue, port issue, or hardware problem
I though you needed to put a bootloader on the atmega328p before you could program with UART?

circuito.io blog
The ATmega328p microcontroller is the beating heart of the Arduino Uno. Learn how to burn its bootloader in a few simple steps, so you can use it as a standalone unit.
it's on 5V .. also I'm trying to do that on 3.3 because I'm gonna use circuit has ATmega328 working on 3.3V
it's already done and i can program it with Arduino uno but i want to program it by ftdi or ttl on 5V and 3.3V
Hmm.. once the bootloader is loaded, so long as your RX/TX lines are right it should work.
You'll need to set the programmer type to match your bootloader too
i tried all ways of contacting rx and tx even the opposite way
i ll try to do that ..but sorry i have no idea how to match the bootloader to my programmer 😅
If you put the Uno bootloader onto the chip, you should program it as an Uno
I have a sony spresense / arduino comaptible board, I have hooked up a EVK-701 sensor chip with a KX126 accelerometer attached to it. https://github.com/RohmSemiconductor/Arduino/tree/master/KX126 I can get the x,y,z, data from it via serial out. I am curious though, what are all the calls possible for this chip? Is it defined in the keywords.txt file (see above link)?? Is there a way to define the sensor update interval frequency? Is it pre-defined somewhere? I see get_val and get_rawval, i see init, one would think I set the update HZ in init. I see no documentation anywhere on how to actually use this library. The examples work fine, but I wonder if there is more to its functionality than I am seeing. Any pointers would be helpful. Im still newish to arduino.
GitHub
Adruino libraries and samples for Rohm Sensors & Bluetooth LE - Arduino/KX126 at master · RohmSemiconductor/Arduino
thank you so much .. i just burn new bootloader and it works even with 3.3

🤍🤍🤍
It took me a month to have the light bulb moment on programming the first Arduino I designed myself. It’s awesome to be able to others get there faster 🙂
really appreciate all that time you spent 😇
Chinese nano clones are like a box of chocolates, you never know what bootloader you're going to get.
Yup
i like chocolate
I'm still trying to decide what parts to get; I think I want to do something a bit more basic with my LEDs, so currently I just have 2 8x8 NeoPixel matrices, and an arduino UNO. What would be a good power source to use if it's to be used in a portable project (the LEDs and arduino are for a costume)? Ideally I'd like something rechargeable to cut down on batteries and be able to power on the go when needed
A PowerBoost board and a LiPo would be an easy way to go
The PowerBoost boards charge, give you 5V out, and can even have a USB port to power things from
An LC709203F fuel gauge can be used to monitor power if you want to get fancier
Alternatively, you could use a lower voltage board like a Feather and run the whole thing directly from a LiPo cell. The LEDs wouldn't be quite as bright, but you wouldn't need a PowerBoost.
I'm still trying to deduce how the access that i get thru arduino ide using the provided library for the chip https://github.com/RohmSemiconductor/Arduino/tree/master/KX126 works. What calls can I make to get data from it? Can I set the g range (the chip docs say it has 3 modes)? Can I change the update frequency? How? Any pointers are much appreciated.
GitHub
Adruino libraries and samples for Rohm Sensors & Bluetooth LE - Arduino/KX126 at master · RohmSemiconductor/Arduino
basically, im looking for someone to tell me if thats the only driver for this chip?
it seems really limited.
i feel like im missing something.
Technically, that's all the drivers needed to do whatever you want. Problem is, it's pretty low-level compared to something someone like Adafruit would provide, as it requires some understanding of the registers and what to write to and read from them. The example sketch provides you exactly what you need to get started, but to really do everything else, you'll need to pull up the datasheet and figure out which registers to read from and write to.
All of the other functions are kinda hidden in the write() and read() functions, which simply write or read data over I2C.
I pulled this datasheet from Mouser, but it's quite a handful to try to digest it all... https://www.mouser.com/datasheet/2/348/KX126-1063-Specifications-Rev-1.0-1154286.pdf
does this stuff from the datasheet exist in this driver?

can i use the registers to set it to differnet modes in arduino ide?
yes/no. you can access that register, and any register, and read/write whatever you want.
that driver has nothing special w.r.t to those register though
looks like get_rawval and get_val are the only methods that actually do anything besides basic register read/write
okay thats what I thought, I wanted to be 1000% sure of that before proceeding.
so like... the arduino driver provided by rohm just doesnt take advantage of the other setting provided by the chip?
its api just lacks those calls?
again... is there any way to make my own driver to gain access to those calls if i wanted to (i dont, i may, i will just use a different arduino based IMU sensor with more functionality)
You could, if you figure out the proper register writes to do so.
The code definitely includes definitions for different sensitivity settings, it just lacks a dedicated configuration function
@heavy star @north stream thank you! This helps a lot in deciding what to buy^^
also, i got the matrices soldered so I tried coding them again since they would now have a stronger connection (originally they were just held together to their cables by painter's tape), but i've run into an error suddenly?
Arduino: 1.8.13 (Windows 10), Board: "Arduino Uno"
Sketch uses 9364 bytes (29%) of program storage space. Maximum is 32256 bytes.
Global variables use 291 bytes (14%) of dynamic memory, leaving 1757 bytes for local variables. Maximum is 2048 bytes.
An error occurred while uploading the sketch
An error occurred while uploading the sketch
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xc2
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xc2
nevermind, it fixed itself when i closed out the program and unplugged then plugged in the arduino
i think it was because a cable moved or something
Arduino weird
Anyone have a couple of moments to help me tease out what's going on with my arduino ISP? I'm trying to re-program the ATtiny2313a that came with the generic USPTinyISP (I don't necessarily trust the folks who flashed it, so I wanted to roll my own). I'm trying to program the ATtiny on a breadboard, I have the 10uF decoupler cap on the ISP reset pin. No matter what I do tho, either there's something wonky about the ArduinoISP sketch, avrdude, or the ATtiny simply isn't responding for some reason (identifier 0x000000).
I know the ATtiny isn't bricked, because I just used it (against my better judgment) to read the flash from the arduino
The only thing I can think of is maybe the attiny has a fuse bit set for the 12MHz crystal oscillator, and the arduino isn't clocking it that fast?
hey, I'm just learning about PortManipulation in arduino - there aren't many good tutorials or examples for it...
now to my problem: I want to have the PIN registers #defined at the top of my code and use them like this
(so PIN{_Port} would get replaced by PINF and P{_Port}{_PortBit} should become PF7 at compile time... I can't figure out the character to (de-)reference (?) the PIN part of this statement.. any help/tutorials/tricks for PortManipulation? kinda already got the basics and yes, I need its speed.
please @ me if you have an answer
you could use a c pre-processor macro and the ## concatenation operator. See https://stackoverflow.com/questions/5106280/string-concatenation-using-preprocessor# (not the accepted answer, which is not really helpful)
thanks! I think that's exactly what I was looking for!
I have a QT Py connected via USB C to my PC. Uploads to it via File Explorer or Arduino IDE usually fail. I managed to get a basic NeoPixel sketch to run once, but not again despite no changes. Any writes to the QT Py cause the COM port to drop out. Tried 3 different cables and 2 QT Py boards (with and without an attached I2C device, the AHT20). Cables work fine to communicate with other devices, can't verify current rating for PC's USB C port.
Recommendations as to what to try next?
qt py M0 or RP2040?
If QT Py RP2040, update philhower core to 1.9.5
M0, sorry for not specifying. Whoops
the symptoms are completely reminiscent of an RP2040 problem, which is why I asked. Just to double check, there is only one pushbutton on the top, and it doesn't say RP2040 on the bottom. Assuming M0, did you add a flash memory chip on the bottom, or not?
If you double-click the reset button, does the QTPY_BOOT drive show up?
@stable forge Definitely only one button. Haven’t soldered an SPI chip on it. They’re straight from the packaging.
@stable forge yes, it will always show up. It’s only when I go to write a file to it (or use Arduino IDE to upload a sketch) that it drops. The COM port completely disappears from Device Manager after a second or two. When I press reset, it comes right back
the comport is expected to go away. Have you used other of our boards with Arduino and they've worked, on this computer?
@stable forge I’ve used them previously, but that was on my older PC. This is my first attempt with this one. It did work for a sketch the one time without issues. Then it went back to the above behavior. Connecting a Trinket doesn’t exhibit the same issues
you are selecting the QT Py board in the Boards menu, right? What error is showing in the arduino log?
which kind of trinket?
Are the Arduino and Adafruit SAMD board packages both up to date?
QT Py connected

@stable forge I just installed Arduino on this PC yesterday. Retrieved all libraries then. Installed Arduino SAMD at that point. Now looking within the Library Manager I'm struggling to find it however to give you the version.
not library, BSP, but if it's yesterday, they will be very new. I assume you must have installed both the Adafruit and Arduino board packages
@stable forge yes, I did. Was walking through the learn article on adafruit.
https://learn.adafruit.com/adafruit-qt-py/using-with-arduino-ide

so what kind of Trinket, and do you have any other Adafruit boards to try
Trinket M0. I also have a Circuit Playground express here, though I'll have to hunt down a mini USB data cable for it.
so the trinket M0 is working fine, is that right? You can upload Blink or whatever to it with the current setup/
(I am setting up a Windows machine to try this)
let me try again to verify.
@stable forge Ok, it wrote to the Trinket M0 without issue. Popped up some windows errors afterwards, but the device is blinking its red LED as expected.
what are the Windows errors?
@stable forge They went by quickly. It said something about the COM port. Then I believe the drive for it disappeared. Expected, correct?
if it said TRINEKTBOOT disappeared without being ejected or something, yes
ok, I am trying a qt py ... one sec
@stable forge Here's what I see after running an upload to the QT Py

did you double-click the reset button, and then select the appropriate port, so it was checkmarked?
is the USB C cable plugged in to the same USB port that you tried with the trinket?
@stable forge No to both. Let me try that
if you are using a USB hub, try not to use it if you can
@stable forge I'm plugging directly in. QT Py uses USB-C, so I was using my actual USB-C port. Trinket was plugged into a USB-A 2.0 port. Using an A to C cable that claims to be USB 3.0 in the same port gives the dreaded red LED of bad cableness 😐
I kinda got it now but I cant get _Port to resolve as F and simultaneously being right next to DDR.

@stable forge same for a micro to USB-C adapter. Have used both to sync with my iPad to this machine on a different USB port. Ugh.
USB-A 3.0 port gives green light.
Upload fails same as before. Then get this windows error.

Let's clean up all the ports. Download the DeviceCleanup Tool from this page (scroll down a bit to find it): https://www.uwe-sieber.de/misc_tools_e.html. Run the tool as Administrator. Unplug all the boards before running it. Delete basically all the devices you see. It won't hurt. They will come back if you plug them in again.
@stable forge Ok. Yeah, definitely in a mess now. Trinket M0 is giving failures now as well.
quit arduino as well
I had a flashing error before aswell - I just cut power and plugged it back in during compile so the upload is right when it comes back on. Was an issue with the serial port being clogged up from the sketch
@stable forge Success! At least one round of getting Blink onto the QT Py. Used my USB-A 3.0 port with the direct A-> C cable after wiping all devices.
Now I'll see if it can do it again....
@dinh
@stable forge I changed the color of the blink... Now it fails:
No device found on COM4
An error occurred while uploading the sketch
double-click reset again and choose the port
I did.
did the port say COMn (Qt Py...) or something like that?
@stable forge It did not. I had unplugged it since the first success. Came back on the same COM port, but no name next to it.

The COM port just disappeared without my attempting to upload. Didn't do anything but take that screenshot and type here.
was it COM4 the first time?
if you double-click to get QP_PYBOOT, then a COM port shows up. I assume. Is it COM4?
@stable forge Yes. I just did another round of Device cleanup and it worked without issues. Showed as it should in the list.

is that with QT_PYBOOT showing?
I believe it was showing when I started the Upload, yes
Uploading again, when the upload is in the middle I get QT_PYBOOT popping up. Then it disappears and the QT Py starts the correct blinking.
what is the model of Windows computer you are using? You mentioned it's new. Did it come with various utility programs installed, or did you install some? Are you running a third-party antivirus, or some backup or disk monitoring program?
Do you have another computer to try this on?
It's a custom PC (Software Dev here). AMD Ryzen 3700X. Windows 10 Pro. Lots of developer tools installed (though none for micro controllers other than what we've discussed). No anti-virus.
The very first upload after wiping the devices, always double-click reset, set the port, and try an upload. Then unplug, double-click reset, set the port, and try uploading again
we haven't heard of specific issues like this with Ryzen
but who knows?
@slate pendant also specific issues with USB C?
no I had micro USB and type A
after unplug it showed up as COM5. Failure on upload.
it showed up as COM5 after double-click? The COM port when QT_PYBOOT is showing should be consistent
yes, COM 5 after double-click. QT_PYBOOT drive comes up, but then disappears after ~30s (along with the COM5 port)
Did you re-plug the cable into the same USB port...?
@livid osprey Yes. I've been unplugging the QT Py from the end of the cable, haven't touched how the cable is plugged into the PC
the disappearing is very odd. QT_PY should stay visible indefinitely
If you have another Windows machine to try, that would be a helpful test to narrow it down to your machine. I'd double-check the list of installed apps and drivers, including using the old "Programs and Features" window, not just the new "Apps" listing. The older one sometimes shows more.
Swapping to a USB 2.0 port leads to the red light of unhappiness. Both USB-A 3.0 ports exhibit the swap to COM5 + disappearing after a delay behavior.
USB C port acts the same as the 3.0 ports with it disappearing after a delay
does your motherboard have some kind of USB power saving feature turned on or anything? I'm at a loss here.
also what motherboard? potentially Asus Strix x470-f?
I swapped to USB ports on the back and have been running through some scenarios.
- After wiping all devices and plugging in the first time it shows up as COM4. If I then double-click the reset button it swaps to COM5 and the QTPY_BOOT drive appears. If I just sit there at that point then it will disappear after a bit.
- After a wipe and plug in for the first time with it on COM4 the Arduino IDE shows it with the proper name and such.
Now that I've fiddled with it some the blink program is no longer running and I've been unable to upload to it again.
@slate pendant Gigabyte X570 Ultra Motherboard
@stable forge No power saving modes that I'm aware of, no. Weird issue!
we coming back to my issue?
hmm
There's only one # in line 20 instead of ##
some of my messages keep disappearing now.
it will show up as two different COM ports: one is when the Arduino program is running, and one is when the QT_PYBOOT drive is present.
I can't tell which messages are going through. I send them, they show for a second, then they're gone. Discord being weird too
Probably the bot saw something that triggered its antispam or language filter...
I tried leaving a QT Py plugged in for a while and it did not disappear (I had not seen that before anyway). I think this is a USB driver issue or some utility program issue
If it wasn't going through, your message would show up on your screen in red
your message hit the banned words filter
@stable forge Ok. I'll try this on my laptop later. Need to get some work done for a while anyway. Was trying to get this rolling while taking a break.
@livid osprey It didn't show in red. Just disappeared
i asked another staff person with a lot of support experience, who also has not seen this problem
Yeah, that's a banned word AFAIK
What got removed:

i deleted that; you said something else beginning with h
@stable forge Very odd... the text above is what I copy/pasted in and it was deleted multiple times.
anyway, not important. Thanks for trying to figure this out. I'll dig more later.
yes, I see it in the log. You put it in quotes above, that should not make a diff, but ...
yup but it doesnt depend on that - the _Port doesnt get resolved to a 7 when using ##
#define __DDRREG DDR ## _Port
resolves to DDR_Port
is there #define DDR somewhere?
nope
then you have two strings which it just concatenated "DDR" and "_Port"
is there a #define _Port somewhere?
Could you show a whole reduced example that does not work? I am seeing the snippets but not the whole context
This might be helpful: https://gcc.gnu.org/onlinedocs/gcc-4.8.5/cpp/Stringification.html
also would it help to use a macro with arguments (e.g. port number, etc.)?
//Setup
#define _Port F
#define _PortBit 7
//Script variables
#define __DDRREG DDR ## _Port
#define __PORTREG PORT ## _Port
#define __PINREG PIN ## _Port
#define __PIN P ## _Port ## _PortBit
void setup() {
__DDRREG &= ~(1<<__PIN);
Serial.begin(9600);
delay(5000);
}
once I get that DDRREG working I can do it with the others and its nice code
__DDRREG should become DDRF
__PORTREG should become PORTF
__PINREG should become PINF
__PIN should become PF7
or is there a better way to adress ports?
that maybe looks the port up in the arduino ide internal portmapping table
#define __DDR(port) DDR##port
#define __PORT(port) __PORT##port
#define __PINREG(port) PIN##port
#define __PIN(port, pin) P##port##pin
@slate pendant
I'm still not quite sure what you want to do here. There are a bunch of macros in the arduino pin header files that might do what you want: see variant.h , which has stuff liek:
extern "C" unsigned int PINCOUNT_fn();
#endif
#define PINS_COUNT (PINCOUNT_fn())
#define NUM_DIGITAL_PINS (19u)
#define NUM_ANALOG_INPUTS (5u)
#define NUM_ANALOG_OUTPUTS (1u)
#define analogInputToDigitalPin(p) ((p < 6u) ? (p) + 24u : -1)
#define digitalPinToPort(P) ( &(PORT->Group[g_APinDescription[P].ulPort]) )
#define digitalPinToBitMask(P) ( 1 << g_APinDescription[P].ulPin )
//#define analogInPinToBit(P) ( )
#define portOutputRegister(port) ( &(port->OUT.reg) )
#define portInputRegister(port) ( &(port->IN.reg) )
#define portModeRegister(port) ( &(port->DIR.reg) )
#define digitalPinHasPWM(P) ( g_APinDescription[P].ulPWMChannel != NOT_ON_PWM || g_APinDescription[P].ulTCChan
nel != NOT_ON_TIMER )
I think this would not allow for setting the PORT from the top of the script (configuration, deployability etc)
but your second message might be really useful
how would I go about making something with an Arduino so that when I push a button one servo rotates 90 degrees, and another rotates -90 degrees, and when I push another button, the servos go back?
start by dealing with buttons and servos separately, to understand the basic of each
and then try merging the two together to achieve what you're after
I have probably quite the beginner question - How do you figure out the pin numbering of the Adafruit boards for Arduino?
Like, is there some place, some documentation where they are defined for all boards? (Specifically Feather m0 and Gemma m0, but would be interested in all of them)
Thank you!
Are the purple numbers on each of the pins the one you would use in the Arduino IDE?
yep
you can also use the silkscreen labels
the small white text on the board itself
digital pins will have a number like 13
analog pins will be prefixed with an A, for example A0
but a lot of times pins can have multiple functions, and the silkscreen can't document them all, just not enough room on the board
for example, on the feather m0 express, 9 is also A7
similarly, the analog pins can be digital pins, A0 is 14, etc.
First of all thank you. Can you point me to where exactly the pins are defined for the IDE to use? Is there some file that I could change to change the pin numbering or are the definitions buried in some binary files?
there are board definition files, variant. h and variant.cpp

GitHub
Contribute to adafruit/ArduinoCore-samd development by creating an account on GitHub.
Thank you so much! That's exactly what I was looking for
i wouldn't mess with the BSP files though
but not every pin can be used for every function. e. g. not every pin can be used as PWM - you need to consult the datasheet
Why?
why do you want to change pin numbers?
Would kubernetes clusters be overkill for an arduino driven network that consists of 1 sensor, maybe geotracking and an img from an onboard cam. Could be a bunch of devices. Data would only be a few bytes of random numbers unless the camera or gps is used. I kinda want people to have their own profiles and data based on the device analytics and user input. I've seen cloud services, caas platforms for machine learning, not sure what route to go to put it all together.
https://puu.sh/IdU86/59b93b3995.png
are these the right settings for an Adafruit RP2040?

yes, if you are using a Feather RP2040, but Adafruit has more the one RP2040 based board. do you have a feather?
one of these?
https://www.adafruit.com/product/4884
note you also need to specify the Port (unspecified in your screen cap)
yes!
im on COM4 so im ok there
having some issues now with LED controls, but im making a little headway
I have some (hopefully basic) questions about multiple power sources in one circuit.
I want to control an MCP4725 I2C DAC with an Nvidia Jetson Nano which runs at 3.3V, and read the DAC output using an Arduino.
I'm about to hook up the three devices as pictured. The DAC has a common ground and the Arduino's VCC is not connected. I believe this should work without issue, can some please reassure me?!

Ultimately the plan is to control an e-bike controller with the DAC, which I have done successfully with just the Arduino. The e-bike controller's throttle uses a hall sensor on a 5V line which I'm trying to emulate with the DAC.
The DAC is going to output a voltage up to the VCC input voltage (3.3 in the above picture). Can I safely connect the Arduino 5V VCC to DAC?
I'm worried the 5V will flow into the Jetson Nano and damage it. Would a diode on the Jetson's 3.3V VCC protect it?

I'm also unsure if connecting both 3.3 and 5V to the DAC VCC will cause problems with it understanding the I2C communication from the 3.3V Jetson Nano
Do not connect a 5V Arduino to a 3.3V device like a Jetson Nano. You will damage the 3.3V device
Instead use a 3.3V Arduino (like a Feather M0 or Arduino Nano 33 or Nano RP2040.
As a general rule, can I connect two devices of the same voltage without worry, and connect two grounds from boards of different voltages without worry?
hi guys, im finally running neopixels! but i really dont fully understand some code i copy pasted
Adafruit_NeoPixel pixels(NUMPIXELS, PIN, NEO_GRBW + NEO_KHZ800);
i added Neo_GRBW to the original Neo_GRBW since im running SK6812s
but i have no idea what the Neo-KHZ800 means, unless that is in reference to the type of pixels im running?
Yes, that's a decent general rule.
Hi I am using the very cool Feather nRF52832 and would like to save some data to it’s EEPROM like you can do with many Arduinos using the:
#include <EEPROM.h>
EEPROM.write(address, data)
EEPROM.read()
EEPROM.update
I just get a:
“EEPROM.h: No such file or directory” which makes sense I guess since that is not made for the feather.
Wondering if the Feather nRF52832 has an EEPROM and how I can write/read from it?
Thanks for any help.
Well i did find some information that the 'NRF52" doesnt have an EEPROM. But somehow you can try using NFFS. But its all over my head. https://forums.adafruit.com/viewtopic.php?t=88272
I just would like to store one INT in non-volatile memory. Are there and easy/tricky ways to do this?
attach an spi flash chip or sd card?
I don't have any room. any way to do it in code?
unless you have non-volatile arduino accessible memory to write to, you can’t
The link above talks about using NFFS but i dont know anything about that. Is that a way to store data?
it’s an NRF feature that’s basically a tiny file system that you can read and write to; trouble is all the links I could find to example code are dead (on my phone at least; there’s likely some examples on adafruit’s github)
Thanks, I dont think I am going to mess this that unless I had a clear guide. Thank you for your help.
The NEO_KHZ800 is an option for an 800kHz data rate. There is also an option for 400kHz. Generally the faster 800kHz should work.
it is working nicely
have another question
#include <Adafruit_NeoPixel.h>
#ifdef __AVR__
#include <avr/power.h>
#endif
#define PIN 12
#define NUMPIXELS 6
Adafruit_NeoPixel pixels(NUMPIXELS, PIN, NEO_GRBW + NEO_KHZ800);
#define DELAYVAL 1000
void setup() {
#if defined(__AVR_ATtiny85__) && (F_CPU == 16000000)
clock_prescale_set(clock_div_1);
#endif
pixels.begin();
}
void loop() {
pixels.clear();
pixels.setPixelColor(6,pixels.Color(255,0,0,0));
pixels.setPixelColor(6,pixels.Color(255,0,0,0));
delay(DELAYVAL);
for (int i = 0; i < NUMPIXELS-2; i++) {
pixels.setPixelColor(i, pixels.Color(0, 100, 0, 50));
pixels.show();
}
delay(DELAYVAL);
}
it seems i cannot individually set the pixel values using the code i set here?
specifically the part about setting pixel colors
i can get the loop to work just fine, but the two i assign on their own arnt working proper
The pixels are 0 based indexing, so the last one would be 5, not 6. I think in the first two lines you should be using 4 and 5.
oh then im borkin this up, ty
KHZ400 is for WS2811-based LEDs.
Hi,
I wanna copy a logo for a TFT display using the adafruit library, depending on a switch case, to keep the displayin code clean, I tried to store the right logo into a pointer to later use it on the display.drawBitmap function.
Problem is that it fails at compile with this error:
error: incompatible types in assignment of 'const unsigned char*' to 'const unsigned char* [385]'
The code:
const unsigned char unknowLogo [] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,....
};
const unsigned char *logoToUse[385];
switch (fs)
{
case FS_UNKNOWN:
logoToUse = (const unsigned char *) &unknowLogo;
break;
...
It fails on the assignment line: logoTouse =...
Any ideas on how to fix this please ?
unknownLogo is a pointer to const unsigned char, where as logoToUse is an array of pointers to const unsigned char. Both allocate storage, and I'm guessing you don't want or need to do that. I'd just replace the logoToUse line with ```arduino
const unsigned char * logoToUse;
Thks, yes I tried that before without success, but at that time I didnt forced cast to (const unsigned char *) &unknowLogo
This works:
const unsigned char *logoToUse;
switch (fs)
{
case FS_UNKNOWN:
logoToUse = (const unsigned char *) &unknowLogo;
break;
This doesnt:
const unsigned char *logoToUse;
switch (fs)
{
case FS_UNKNOWN:
logoToUse = &unknowLogo;
break;```
```src\main.cpp:232:17: error: cannot convert 'const unsigned char (*)[384]' to 'const unsigned char*' in assignment
logoToUse = &unknowLogo;
^```You also do not want the & character, which takes the address of what is already a pointer.
I don't think you need the cast either.
with this:
logoToUse = unknowLogo;
it will take the address of the variable directly ? 😕
Yes, unknowLogo is an array, and in C, arrays are referred to by address.
okay, indeed it works, thanks 🙂
https://youtu.be/AhvDJaFdmw8?t=309
Ryzen 3000 has USB issues (min 5:10)

Thanks to 3CX for sponsoring this video! Get 3CX free today at www.3cx.com/?src=ltt
In this episode, callers navigate a hilarious phone maze in hopes of getting personal IT tech support from Linus himself.
Discuss on the forum: https://linustechtips.com/topic/1376180-press-1-for-tech-tips-sponsored/
►GET MERCH: http://www.LTTStore.com/
►SUPP...
Ok I have a question about working with Arduino BLE. I have a stepper motor that I want to control remotely. I have 3 modes for control that are each contained in there own Arduino programs. Is there a way that I can change programs remotely without uploading the new code?
Currently the solution I'm working on is containing each program in a giant while loop and then switching between while loops by sending a command to the arduino.
Are there any more elegant solutions that you guys/girls know of?
That general approach of using higher-level program logic to switch between operating states is indeed what people typically do.
using functions and calling the functions via a command?
Is arduino suitable for very hi safety priority purposes or would straight C++ be better?
I wouldn't use either, perhaps Rust would be a better choice
I have a smidgen of C++ experience, how hard is it to learn rust from scratch? My company wants me to build a human sized one of these that is spun by a motor while people stand on it. I have some concerns about safety, to put it mildly.

I honestly don't know, as I haven't yet learned Rust myself. However, this looks like a fairly conceptually simple system, so other options include sticking with Arduino and doing rigorous analysis and testing, or adding hardware to enforce safety features.
Yeah system wise it's pretty simple, just a single actuator and feedback sensor, but since people are gonna be on the thing, it needs to be safer than safe
I was thinking 2rpm max with a .1-.2rpm/s acceleration
I also prefer a belt-and-suspenders approach to safety
What's that idiom?
It refers to keeping your pants up: some people wear a belt, some people use suspenders. However, the saying goes that if you want to be double sure your pants don't fall down, you could wear both.
It's an old idiom (not a lot of people wear suspenders these days), but seemed applicable
I think the overall system design will be more critical to safety than the choice of programming language or framework. For example, if your feedback sensor dies and starts giving bogus constant data, does that cause the motor controller to accelerate to max speed, or to shut everything down? Etc.
Perhaps specifying a motor that cannot go faster than the desired max speed.
Yeah I was hoping there were big slow motors for stuff like this. I'm going to call around drama departments at colleges nearby and see if anyone has a rotating stage I can look at
You're unlikely to find a motor that inherently runs slowly, but you may be able to find one with integrated gearing.
Would a pulley system be acceptable?
A belt drive? Yep, that could certainly work, and would be quieter than metal gears, I expect.
Quiet is preferable. And easy to service
Ah, is this the project where you were asking how to solve for the torque your motor needed?
A giant "Weihnachtspyramide"?
Not really arduino but is this posable it worked for a second

What's it connected to?
It should from your picture, but I can't see very well
That's it
What's the board? A Nano clone?


That's just a FTDI programmer, it looks like to me. Then no, it shouldn't work
A Nano or an Uno would be good
I got uno
OK, that'd do fine
👍
hi there, I created a void who spam a key, it's possible to creat a buffer for this void ?
I'm not sure what you mean by void here, perhaps a data type? Usually buffers contain a certain size of data, but void technically means nothing, some languages use a void pointer as a pointer to anything.
Oh I knew how to solve, I just wanted a sanity check that using CAD MOI would work
I misunderstood then, yeah CAD would work for that, the thing that gets me with finding MoI with CAD is sometimes I forget which axes I aligned my parts too
Sometimes people see void loop() and conclude that void means "function".
If it is a function to spam a key, then what does the buffer do???
I'm not sure what you're asking. Do you mean a pull-up resistor, or just connecting it to a fixed level or what?
Kind of like a pull up resistor bit within the arduino
With the IO pins I can set the mode to OUTPUT and then they are pulled down internally
I was wondering if that's possible with the Analog input pins as well
@north stream

Ok. Different question: on this pinout diagram it says that pins A6 and A7 are Analog only. Do you hav a better idea how to get the digital value anyways besides writing a function that checks whether it's over some voltage?
No, actually that's exactly how you would get a digital value from an analog input. Better ideas wouldn't be doing it differently, they would be doing it more efficiently?
K
Yes, you can use the analog pins as digital pins that way.
No. I meant whether I could pull them down internally
No, I assume that's the reason they're "exclusively analog."
If you pull them externally, you might be able to get an artificial digital input, but you would still suffer from the same drawbacks an analog pin has due to the way it's hardwired to the ADC block.
What's an ADC block?
I'm just gonna fire the next question: I use pins 0...7 on my board. Pins 0 and 1 are RX and TX (I kinda know what they do, I've used them before).
Now if I write C Serial.begin(9600); into setup I can see the stuff it sends (on the serial monitor) but also pins 0 and 1 are occupied. As far as I know RX and TX aren't used for USB communication (at least I used them for a different protocol). Can I keep the serial data transfer but without pins 0 and 1 being occupied?
I'm a little unclear on what you mean by RX and TX aren't used for USB, but the serial data for the Nano does use pins 0 and 1.
You can view the schematic here https://content.arduino.cc/assets/NanoV3.3_sch.pdf
It's just the part of the MCU that handles all the analog-to-digital conversions. Most pins are on a reassignable port, but these two are not.
RX and TX are the pins that connect to the USB through the USB-UART bridge, there is no way to separate the two.
Ok :( I'm really struggling with my pins now. I need 8 input and 8 outputs. Also a few trigger buttons for controll of the thing are necessary. But they are used up really fast. Maybe I'll put my output on a shift register so I can make 4 pins as if it were 8
8 inputs and 8 outputs?
Mind if I ask what you're trying to accomplish? I might have some suggestions to conserve pins...
I'm making a thing where you can programm a virtual ram with op codes and then it executes them step by step

https://forum.arduino.cc/t/multiple-buttons-on-1-analog-pin/8622/9 This could cut down on the inputs needed for your DIP switch?

Arduino Forum
Don't mind the nominal precision. Just buy a charge of any equal resistors.... They will be equal... (I think this concept has been discussed three times during the last month :-) )
Maybe. I'll look into it if it becomes a problem
But when I'm only using the analog in pins for input, the io pins are enough (I think)
Any tips on what to do when the cable length doesn't match the length I need (you see it on the picture with the red cables)
Get some wire strippers and a soldering iron, then strip and tin your own wires to whatever length you need, perhaps?
I hereby declare the cables complete 🏁
Not a bad idea
it's been a while since I did audio with the arduino, what's the best way of playing wavs now that the waveshield is obsolete
@leaden walrus You've been doing things with BusIO, right? I'm getting an error trying to upload a sketch, and the error isn't in my code.
yah. what's error?
/.../Arduino/libraries/Adafruit_BusIO/Adafruit_SPIDevice.h:68:72: error: 'SPI' was not declared in this scope; did you mean 'PI'?
68 | uint8_t dataMode = SPI_MODE0, SPIClass *theSPI = &SPI);
| ^~~
| PI
exit status 1```(The ... is my path, I removed it.)
what board are you building for?
Proximity Trinkey
it probably doesn't have a default spi
or any spi...let me look...one sec...
Thanks
ah. no guide. guessing you're writing?
Yes 😄
Trying to run the code it shipped with, to test it for the guide.
Because when I installed FreeTouch, it shows up as INCOMPATIBLE in the examples list....
So I wanted to see if it was even working. And got this instead.
Ugh. It's not showing up that way anymore.
I should have gotten a screenshot.
So...... How do I use the APDS lib with it then?
i2c?
Well yeah...
But I just tried the proximity sensor sketch and get the same busio failure
Where is it calling SPI?
hmmm. not sure. let me fire up arduino and see if i can replicate...
Hey, can you help me: I now have what I got what i want on the top. It outputs a 8 bit number in binary with the LEDs. But what I want is that it also gets output on the bottom using those seven segment display. I planned to just send the output from the main arduino to the second arduino which then does the conversion to hex(in red) or to decimal twos compliment (the one with +-). What's a good way of letting the 2 ardoinos talk to each other? It only needs to be one way (maybe SPI or Uart or I²C)

This is outside my comfort zone, but I think UART is a common way for talking between micros in general. Someone else may have a better answer.
Ok
I have used UART before so that's a plus.
On the other hand: on the top side of the arduino nano there are 6 pins used for SPI. That means that I don't use up more of the already limited pins
@pallid grail i'm getting same thing. i think it's sort of an arduino thing. it's compiling the entire busio library, even though APDS only uses i2cdevice.
Ok. That's good you're getting the issue I guess. But bad because I have no idea how to proceed.
guess this could be considered a bug. the busio lib needs to protect against boards without SPI or I2C.
guess this is first time such a board has been used
Wonder how Limor got it to work. Maybe the testers work differently?
They must, they don't compile, they simply flash, I assume.
So what should I do?
i'd say open an issue. but also curious how limor didn't run into this? maybe ping us over in slack and ask this? not sure how any of the recent busio changes could cause this.
Can someone else help?
UART is the standard comms between two MCUs. Just make sure you connect TX to RX and vice versa.
Isn't it also used for USB?
I'm sending debug data to USB.
Does that interfere?
Hardware pins may be occupied by USB serial, so you can either read the same data and share the same pins, or setup two pins for software serial.
That depends on what kind of data you're looking to receive, and whether or not your 2nd MCU can filter out the debug info.
If I were to send data from 1 arduino to the other one, would the USB monitor be able to see it?
Yea. I can make a filter
Open-source electronic prototyping platform enabling users to create interactive electronic objects.
If you use the hardware pins, yes?
The original plan was that the master would just send the 8 bit number and the slave would just display whatever it gets.
I think I have 3 or 4 free pins.
So I might use software serial
If you set a certain string to scan for, you can encode your commands for the other controller to read only the number immediately following your set string
Plenty of options to choose from
If I were to use SPI, is it more difficult? I thought there are libraries that could handle all the difficult stuff and I just connect 6 cables and I'm good to go
More wires, comparable complexity?
As you can see at the top, there are designated pins for that.
For your application, it's about the same.
Most inter-MCU communication is best done with UART just because it's asynchronous and super easy, but if it's one-way data, SPI is an option you can select.
It's only slightly more complex, and usually not worth it because you can easily repurpose the SPI RX and TX pins as UART most of the time.
But there do exist libraries for it.
Don't RX and TX mean UART?
Not strictly, no. They're usually used as UART designators, but they're commonly seen in any similar protocol with two opposing unidirectional data lines.
It's just SPI has a bunch of different names for the same pins, especially so these days because the original names were based on a "master and slave" concept that people are frantically trying to rename recently.
is it possible to change the playback rate of a file using the audio featherwing shield like it used to be on the wave shield?
I would guess so. It's probably worth seeing if they use the same chips.
Hey. I need help with electronics (LEDs and resistors): i have this 7 Segment Display. I also have an arduino that has 5 V output voltage. When I used the display with 5 V it had 500 mA (way too much). Now I put a 100 Ohm resistor to the before the common ground of the display and it only has 25 mA and I don't see a great reduction in brightness.
Now, what if I want to make 2 segments light up at the same time they only have 1 resistor. I have learned by this sit that this is bad tho. Why? How can I fix it?
Here's a picture

The blue wire is ground and the yellow wire is +5V
This is what I think the current configuration looks like

Pls ping if you can help or tell me where I should ask instead
You'll want to have a separate resistor for each segment. The resistor limits the amount of current that flows, so when you have two segments using the same resistor, the current through each gets halved.
Depending on how the 7-segment display is wired, you might need to put the resistors on the 5V side instead of the ground side. Whichever has the individual connections for each segment.
As I said there is 1 common ground (the blue wire) and I can turn on the rest by setting the other pins high
Right, but you'll want separate resistors on the high side instead of on the ground side to limit current per segment, not overall.
Ok
I assume it's a common anode display.
If you use your original circuit, your current will be split among all of the segments, resulting in a comparatively dimmer display when you're using multiple segments at once.
I have a bit of a problem as most pins of the bread board are already occupied. Is it possible to somehow not use another pin? I just want to plug in the cables and lead them to my output
If it's solely for testing and you can accept the drawbacks of the single resistor solution, sure? However, if you want to do this properly for an actual finished display, my recommendation would be to get another breadboard for resistors or a resistor array.
It's basically a bunch of resistors packaged into a single chip. https://www.mouser.com/Passive-Components/Resistors/Resistor-Networks-Arrays/_/N-e89l?P=1yzimuzZ1yxu8a7Z1y8qgm3Z1yzu5l9Z1z0z7l5Z1yzu5ah
I don't actually know the difference between networks and arrays, probably something to do with the way they're interconnected?
They're particularly useful for applications requiring a lot of the same resistance, such as 7-seg displays, but I do believe most people simply opt for a 7-seg driver these days for simplicity.
Yes, i would do that but i Plan in showing stuff like i and sometimes i need Hex, sometimes i need decimal (or 2s compliment with the +-)
I need 7 + 7 + 4 + 7 + 7 = 32 pins. I don't think the arduino can do that :(
A Nano certainly can't. Have you considered a larger board like the Mega?
Arduinos come in all sorts of (well, maybe not shapes, they're mostly rectangular) and sizes.
Nope. I have a adafruit Feather M0 and 3 arduino nanos
@rocky schooner just fyi, there are chips that can make interfacing to that LED easier
otherwise you do need a resistor for each segment as well as a dedicated pin
it'll end up looking like in this old product photo:
https://cdn-shop.adafruit.com/1200x900/768-00.jpg
there's this as one option:
https://www.adafruit.com/product/1427
and if you want to stick with going the low level route (resistors and pins everywhere) and are running out of pins, then can use a GPIO expander
Ok now only somewhat related question:
How can I wait for a button press ? I used an interrupt and a function but i don't know of that's the best way (it probably isn't. Previous code:
https://pastebin.com/Ya0te77i
Pastebin
Pastebin.com is the number one paste tool since 2002. Pastebin is a website where you can store text online for a set period of time.
#define interrupt 10 // Black wire
#define OK_BUTTON 10
volatile bool button_rising = false;
void await_button();
// -------------------------------------------- I/O stuff ------------------------------
//----------------------------------- BUTTON STUFF ----------------------------
void button_pressed() {
Serial.println("button got pressed");
button_rising = true;
}
void await_button() {
delay(500); // button only gets recogniced max 2 times per second
button_rising = false;
while (not button_rising) {}
button_rising = false;
}
bool askIfNewNumber() {
write_to_shift_register_high_first(0b11011011, 0);
while (not button_rising) {} // await button rising
button_rising = false;
return read_from_shift_register(0);
}
void setup() {
pinMode(LOAD_INPUT_TRIGGER, INPUT);
attachInterrupt(digitalPinToInterrupt(OK_BUTTON), button_pressed, RISING); //## here i set it up
Serial.print("Starting\n");
}
//## The idea is that I wait for the user to set the switches and then they press the button and the code procedes to read what was on the switches
It says for LED matrix does it still work for my 7 segment display? Also, do I still need the resistors when I use this?
no resistor are needed. you can look at the schematics for the various LED backpack boards as a ref:
https://learn.adafruit.com/adafruit-led-backpack/downloads
you can think of all these type displays as being matrices
some are obvious square N x M matrix things. for the segmented LEDs, each segment is like an element in the matrix.
you can see in the link above how many different style LEDs can all be driven by the same HT16K33
I'm a little lost on this link. Aren't these all boards with LEDs? I already have the displays. I only need the logic component to connect them
sure. it's just that the HT16K33 takes care of a lot of that.
you don't have to use it
you can use a bunch of resistors and a ton of GPIO pins
with the HT16K33, you'd only use I2C pins on the host controller
Nice
Do you know if Adafruit ships to Europe? I want to buy this https://www.adafruit.com/product/877

By popular request, you can now get our 7-segment LED backpacks without the LEDs! These backpacks feature an HT16K33 I2C LED driver, they're simple and easy to use - you can use our very ...
Also what's the difference to this product https://www.adafruit.com/product/1427

This is the magic sauce in our 7-segment and matrix backpacks, now available in breadboard-friendly breakout board format. The HT16K33 is a neat little chip that has the ability to drive a ...
in general, yes. more info on shipping here:
https://www.adafruit.com/shipping
but can also check:
https://www.adafruit.com/distributors
PID 1427 is a general purpose breakout for the HT16K33
PID 877 uses the HT16K33, but has specific wiring for the 7 segment LEDs (like linked from that product page)
7 segment LEDs from other sources may have different pinouts, so don't think of PID 877 as "works with any 7 segmenet LED"
but you could use the schematic info in the guide to see if it would work for any given LED
I buy from pimoroni if the product is available there
@leaden walrus I have this sketch that should work, and it compiles and uploads properly (now that I'm not trying to use the Feather RP2040), but nothing is happening. My wiring is hard to mess up, there's almost nothing to it. Not sure how to troubleshoot.
Wait nevermind... ugh. I started the serial monitor, and the code started working.
ha! that's the arduino show() 🙂
Ok, part of it is working?
It's this rotary encoder.
The LEDs are lighting up from the buttons, but I'm not getting any info from the encoder rotation. Which it looks like I should be getting.
comment out this line to change that behavior:
while (!Serial);
Ah fair enough.
what board?
Feather M4.
Because it makes wiring really easy.
You simply plug in the rotary encoder breakout to the short side of the Feather.
7 GPIO needed, 7 available.
what's the pid for the encoder?
hold on.
getting.
https://www.adafruit.com/product/5001 and the breakout is https://www.adafruit.com/product/5221

This funky user interface element is reminiscent of the original clicking scroll wheel interface on the first iPods. It's a fancy mechanical kit but has an intuitiveness that is ...
The ANO rotary encoder wheel is a funky user interface element is reminiscent of the original clicking scroll wheel interface on the first iPods. It's a nifty kit, but the pin-out ...
ah neat. so connected like in that product photo?
Yep
Same demo
but the rotation isn't working
Green LED should be moving around the ring, it is not. And the serial output is not showing rotation. Except once.
LED shifted by 1, and the serial printed one detente
Not sure when that happened.
Ok now I know when it happened
Rotate the encoder, then press the center button, and it moved the LED by one, and says it rotated by 1.
That does not continue to work.
And is not how it should be working, afaik.
(I reset the board to see if that would help, and got the same behavior)
was demo written for feather m4?
If not M4, then M0. But the board in the product vid is M4.
Code was written for Feather.
I did not update the pin defs.
ENCA 13
ENCB 12
COMA 11
SW1 10
SW2 9
SW3 6
SW4 5
SW5 SCL
COMB SDA
that's what i get for a feather m4, code is a little diff
that probably doesn't matter, would just change direction
You're right though!
The pins were wrong.
Wonder how it ever worked for Limor.
Or maybe it wasn't written for that wiring setup in the first place.
I swapped to what you have and it works.
Thanks @leaden walrus!

{kind=link}
{kind=link}
{kind=link}
Yeah that's what I'm thinking.
Was the com pins being wrong were what was making it not work.
Or partially work anyway.
it could have been written for a different feather
yah, getting the two COM pins correct is important
otherwise that entire bank of switches probably wouldn't work
swapping ENCA/ENCB would just be a sign change in the rotation, would still work though
and for all the SWx pins, would just be a mapping issue
Right, which I wouldn't have noticed because the LED ring is already oriented differently than the encoder.
So no baseline to use.
Hi, I am using a Feather nRF52832, I am not using Bluetooth but would like to. Ideally I would like communication between the feather and a Mac running Processing. All I can find are examples using a smart phone. Could someone point me in the right direction?
Thanks
Ps: here is what I am working on…

Oooo Vectrex!
I wish I had a Vectrex
Yeah they are fun. I made the wireless controller using the Feather nRF52832 and some nRF24l01+. Thought it would be fun to get my mac to talk to the controller using Bluetooth but I am not sure where to start with that. I do have it talking to my computer using USB.

Also if you look closely you will see that my Vectrex is running the 1979 arcade version of Asteroids. There is a new device called a PiTrex that uses a raspberry Pi Zero W and allows the Vectrex to play a whole new world of games.
Again: is this Ok or is there a bette solution?
so I'm a bit closer to what I want from coding with NeoMatrices and Arduinos, but I can't find good tutorials for getting tiled NeoMatrices to display simple "eyes"/"eye shapes" on their LEDs. I am using a modified version of the adafruit "tiled" example for this code.
// 'Howdy' across three 10x8 NeoPixel grids that were created using
// NeoPixel 60 LEDs per meter flex strip.
#include <Adafruit_GFX.h>
#include <Adafruit_NeoMatrix.h>
#include <Adafruit_NeoPixel.h>
#ifndef PSTR
#define PSTR // Make Arduino Due happy
#endif
#define PIN 6
// MATRIX DECLARATION:
// Parameter 1 = width of EACH NEOPIXEL MATRIX (not total display)
// Parameter 2 = height of each matrix
// Parameter 3 = number of matrices arranged horizontally
// Parameter 4 = number of matrices arranged vertically
// Parameter 5 = pin number (most are valid)
// Parameter 6 = matrix layout flags, add together as needed:
// NEO_MATRIX_TOP, NEO_MATRIX_BOTTOM, NEO_MATRIX_LEFT, NEO_MATRIX_RIGHT:
// Position of the FIRST LED in the FIRST MATRIX; pick two, e.g.
// NEO_MATRIX_TOP + NEO_MATRIX_LEFT for the top-left corner.
// NEO_MATRIX_ROWS, NEO_MATRIX_COLUMNS: LEDs WITHIN EACH MATRIX are
// arranged in horizontal rows or in vertical columns, respectively;
// pick one or the other.
// NEO_MATRIX_PROGRESSIVE, NEO_MATRIX_ZIGZAG: all rows/columns WITHIN
// EACH MATRIX proceed in the same order, or alternate lines reverse
// direction; pick one.
// NEO_TILE_TOP, NEO_TILE_BOTTOM, NEO_TILE_LEFT, NEO_TILE_RIGHT:
// Position of the FIRST MATRIX (tile) in the OVERALL DISPLAY; pick
// two, e.g. NEO_TILE_TOP + NEO_TILE_LEFT for the top-left corner.
// NEO_TILE_ROWS, NEO_TILE_COLUMNS: the matrices in the OVERALL DISPLAY
// are arranged in horizontal rows or in vertical columns, respectively;
// pick one or the other.
// NEO_TILE_PROGRESSIVE, NEO_TILE_ZIGZAG: the ROWS/COLUMS OF MATRICES
// (tiles) in the OVERALL DISPLAY proceed in the same order for every
// line, or alternate lines reverse direction; pick one. When using
// zig-zag order, the orientation of the matrices in alternate rows```// See example below for these values in action.
// Parameter 7 = pixel type flags, add together as needed:
// NEO_RGB Pixels are wired for RGB bitstream (v1 pixels)
// NEO_GRB Pixels are wired for GRB bitstream (v2 pixels)
// NEO_KHZ400 400 KHz bitstream (e.g. FLORA v1 pixels)
// NEO_KHZ800 800 KHz bitstream (e.g. High Density LED strip)
// Example with three 10x8 matrices (created using NeoPixel flex strip --
// these grids are not a ready-made product). In this application we'd
// like to arrange the three matrices side-by-side in a wide display.
// The first matrix (tile) will be at the left, and the first pixel within
// that matrix is at the top left. The matrices use zig-zag line ordering.
// There's only one row here, so it doesn't matter if we declare it in row
// or column order. The matrices use 800 KHz (v2) pixels that expect GRB
// color data.
Adafruit_NeoMatrix matrix = Adafruit_NeoMatrix(16, 8, 3, 1, PIN,
NEO_TILE_RIGHT + NEO_TILE_LEFT + NEO_TILE_COLUMNS + NEO_TILE_PROGRESSIVE +
NEO_MATRIX_RIGHT + NEO_MATRIX_LEFT + NEO_MATRIX_COLUMNS,
NEO_GRB + NEO_KHZ800);
const uint16_t colors[] = {
matrix.Color(255, 50, 0), matrix.Color(0, 255, 0), matrix.Color(0, 0, 255) };
void setup() {
matrix.begin();
matrix.setTextWrap(false);
matrix.setBrightness(40);
matrix.setTextColor(colors[0]);
}
int x = matrix.width();
int pass = 0;
void loop() {
matrix.fillScreen(0);
matrix.setCursor(x, 0);
matrix.print(F("0"));
if(--x < -36) {
x = matrix.width();
if(++pass >= 3) pass = 0;
matrix.setTextColor(colors[pass]);
}
matrix.show();
delay(100);
}```What I want to display is the following:

I'd like Arduino to "draw" eyes onto the Matrices, so two simple circles, one per matrix, that will blink at random intervals
I am using the feather stm32 board with the micro sd slot and the sd card writing seems to fail at random times. I am writing to it rather fast so I that might be a reason as to why it is failing. Is there a way that I can write to sd card super fast with this board without it stopping writing randomly?
I am using the STM32SD library to write
Which core are you using?
I am using arduino
STM's I believe
I seem to remember someone wrote an SD library against Roger's core, you might want to try that.
Are you using a genuine name brand SD card? Many of the knockoffs will go off into the weeds occasionally.
I am using a sandisk sd car
Do you happen to know where I can find that?
Should be in the library manager if you have Roger's core installed.
Note that with most libraries, you have to do a status check to make sure the card is not busy before you write again. Note that there are a lot of fake Sandisk cards out there.
I have stm then casue it is not showing up
I am using if(dataFile) before each write. dataFIle being my instance of file
I am wondering if I am writing too fast cause I have a delay of 2 seconds between each entry but it needs to be that fast for the type of sensor I want to use
hi guys, sorry if this isn't the right place to put this, but how hard would it be to use the ssd1305 arduino library with c code? how much of it is written for arduino and how much will "just work"?
Hallowing m0
@paper mist entirely written for arduino. for use elsewhere, can potentially be done, but would take some effort to fill in all the missing pieces the arduino core provides.
understandable, thanks 🙂
I'm interested, what/what platform were you planning to port that library to?
focuscalc, I'd love to have it written in c
I can do basically everything with not a ton of issues but the display libraries are holding me back
also the adafruit gfx lib now that I think about it
if you wanted to, you could write a custom library to gain the extra functionality you’d want
what’s the problem with the GFX lib currently? is it feature-wise or hardware-wise (efficiency, variables’ memory usage, etc.)?
there's no issues with the current arduino code i have (at least, none that are caused by any libraries) though it is pretty heavy on both memory and flash (more than i'd expect, given how basic it is). i'm hoping rewriting it in c would free up some resources and maybe i'd learn something along the way
actually now that i think about it (and i just confirmed it), i'm not even using the gfx library as i'm only displaying text, however i'm still using around 800 bytes of ram and 20k of flash
not worrying numbers by any means but still lol
nevermind, i was being an idiot and even though i removed the includes from my code it was still being used to compile. if i fully remove the gfx library it fails
I’m not sure using C instead of arduino C/C++ would do much; it’s be about the same as perhaps figuring out what parts of the GFX library are used, paring it down to those essentials, and using that as a custom library
does anyone know where to find an itsybitsy32u4 footprint for kicad?
I'm pretty sure the Arduino compiler already removes unused functions and stuff
oh right! thank you for reminding me deadcode removal is a thing, I forgot about that sorry 😅
fair enough, thanks 👍
interesting, thanks 👍
Can one access the web (with a M0) by name? I have a raspberry pi with mosquitto and node red that I want to communicate to but I would rather use raspberrypi.local instead of the (changing)ip address. Is it possible?
The M0 doesn't have a lot of resources, but you might be able to use either a DNS server or Zeroconf/Bonjour to do address resolution.
Hey, again about this pinout: What does AREF mean?
Analogue REFerence
So Ground?
Well usually, it's the voltage being compared to for your analog inputs. This would connect to a fixed voltage to define the voltage range your analog input values would correspond to. https://support.arduino.cc/hc/en-us/articles/360018922239-What-is-the-AREF-pin-for-

Arduino Help Center
AREF means Analog REFerence. It allows us to feed the Arduino a reference voltage from an external power supply in order to configure the reference voltage used for analog input (i.e. the value use...
I need a relative point in time to compare against (either running time or global time) how could I get one of those on arduino
millis() or micros() are both counters that give you time elapsed since power-on.