#circuitpython-dev
1 messages · Page 221 of 1
Currently removing stuff is somewhat ad hoc. You'll want to look at ports/atmel-samd/mpconfigport.h and maybe boards/trinket_m0/mpconfigboard.h
@cunning trail in reading the article, and looking at Debra's blog, seems that for the handbags/headbands she's using the Gemma (naturally..best fit). To get around the file size with hardware, ItsyBitsy M4 would be the closest wrt size constraints. Then there is also Roy's pixelbuf work that may help on the M0 too. Having said all that, MakeCode seems the "better" suggestion in the interim?
@obsidian dome you may want to use the 3.x branch right now instead of master, which is undergoing churn as we develop 4.0
danh: Thanks. I'm looking into it. Right now I'm setting up a VM for building.
Feel free to return here for help. A number of folks who hang out here have done their own builds
Looks like I can easily loose touchio, i2c and SPI for my project
@obsidian dome what OS are you on?
k. i was going to suggest WSL if you're on Windows. Its the "fastest" compile time-wise.
interesting. anyone else stumble upon this recently?
https://github.com/actions
https://github.com/features/actions
GitHub
Automate your GitHub workflows. GitHub Actions has 16 repositories available. Follow their code on GitHub.

GitHub
Easily build, package, release, update, and deploy your project in any language—on GitHub or any external system—without having to run code yourself.
Any suggestions for how to determine which modules use the most space?
I saw they announced it, but wasn't aware it was available yet.
still beta, but it showed up on the CP repo. (which is how i came across it)
@obsidian dome hmm.... i wonder if the object sizes are useful there.
That's what I was thinking, but sometimes small objects have massive dependencies in code. Don't know if circuitpython will be like that.
find build-metro_m4_express -name \*.o -ls
That's why I wondered about it.
build-metro_m4_express/firmware.elf.map might help
(use your build dir instead)
I can't remember if the map is produced if you don't use DEBUG=1
Kudos to whoever manages the circuitpython repo. Once I got to the learn page it all worked like a charm. The only trivial issue was checking out 3.x as three directories from master (lib/tinyusb, ports/nrf/nrfx, tools/huffman) weren't empty. But hey, I know now to rename a directory. Again, kudos for a good tutorial and process.
 yeah, I still refer to the debugger setup instructions page instead of remembering it. I ❤ Adafruit Learn.
yeah, I still refer to the debugger setup instructions page instead of remembering it. I ❤ Adafruit Learn.
I use a Trinket M0 Express with CircuitPython 3.1.1 and libs bundle from 12/29/2018
Trying to use a LED 7-segment Display
As in the doc, when reaching
display = adafruit_ht16k33.segments.Seg7x4(i2c)
Generates an error: NameError: name 'i2c' is not defined
Here some photo of the wiring
Trinket M0
https://photos.app.goo.gl/bsmJMYGT3PXyopBE9
Led Backpack
https://photos.app.goo.gl/8TfvWC1onWZRoYq26

Google Photos

Google Photos
sounds like you didn't create the i2c bus
do you have a line of code that looks like this?
i2c = busio.I2C(board.SCL, board.SDA)
oh... right :)
The problem was I jumped to the Led Backpack in the doc and forgot this line. Thanks
np. what doc are you reading?

How to use LED Backpacks & FeatherWings with CircuitPython!
everything is there but I made this quick read jump.
hmmm. yah, that's written so the individual sections aren't really code complete.
that's easy to jump that line (I saw the import lines just before)
yep. the "I2C Initialization" section applies to all the displays - the sections that follow
take a look at the examples in the library also:
https://github.com/adafruit/Adafruit_CircuitPython_HT16K33/blob/master/examples/segments.py
having complete code to look at helps
oh nice, I was looking for example like this but was looking for something with the name of the library I use (adafruit_ht16k33)
perfect, I'm doing a little countdown gadget for the fun
If the esp 32 has two cores can Cp run on just one? (Just conjecture. Not request or suggestions)
Leaving the other available for wifi sterf ?
I didn't know thete was CP for esp32
There is not and there is not likely to be...
@marble hornet some interesting stuff on using both cores with Arduino https://www.hackster.io/rayburne/esp32-in-love-with-both-cores-8dd948 --- I did some quick google searches for micropython on dual cores and there appears to be work on this. I did not dig too deeply.

Hackster.io
Arduino on the ESP32 is a match made in heaven: One core for RF and one core for Arduino; but you can cheat and get more Arduino resources. By Ray Burnette.
@umbral dagger hey hey
the guides are ready to live in a min...but i was wondering, i think the debouncer should go in a helper library no? seems like ya use it alot?
@meager fog Yeah, we'd mentioned that. Kattni and I are going to sit down and talk (me) through it to make it happen. Just haven't gotten mutual time to do that yet. There's a couple tweaks I want to make to it to make it more generally useful. It's on my list for the new year. That said, it's getting a fair bit of testing.
kk its not too hard - i have a checklist
if ya can, for the garmin guide, can you take a 2-3 sec gif of you spinning it in your hand so we can see the lens part?
like turning it around so you can see that there's a lidar sensor on the other side 😃
ive been intersted in that myself, that page is giving 404

Share your code with the world
ah 😃
What is the maximum pwm frequency for the M4 in circuitpython?
For example in the code "led = pulseio.PWMOut(board.D13, frequency=5000, duty_cycle=0)"
I can't quite recall but I think it's like 20-50KHz-ish or less
it's definitely in the KHz range
First time here... Looking for some help with libraries. Not sure how to change default settings. For example - changing the range on the L3GD20 gyro.
nav, check the docs here https://circuitpython.readthedocs.io/projects/l3gd20/en/latest/api.html
@solar whale thanks for the link!
Separately:. Is there a good reason to go 32 over 8266 when doing cp wifi?
yes esp32 can to secure connectiosn better/faster
Thanks, but my mechanical engineering background is showing. Tried
sensor = adafruit_lsm303.LSM303(i2c,rng=0)
and got back TypeError: unexpected keyword argument 'rng'
@meager fog Converting a spin gif now. Where do you want it?
Apologies...being a dingbat. I am working with both. Trying to use my Metro Express with ZumoBot.
@meager fog have a look
@hearty edge adafruit_lsm303.LSM303() only takes an i2c argument, not a rng argument. Just take that away for now.
@tulip sleet Thanks - got that. Now trying to write set a register on L3GD20. Trying SENSOR.write_register(_L3GD20_REGISTER_CTRL_REG1, 0x0F) and getting a NameError.
Fubling my way through "class" and "parameters"...
@hearty edge the _L3GD20_REGISTER_CTRL_REG1 value is not available (normally you'd use SENSOR._L3GD20_REGISTER_CTRL_REG1) because it's a compile time const due to special rules (it's set via const(...)). Do you need to set the register yourself? We already set it to 0x0f in __init__()
@tulip sleet Thanks again. What I am really trying to do is to get a handle on how to use the libraries to control the different aspects of the sensors. I would like to have my students - mechanical engineering sophomores - to use these devices so I am trying to do a deep dive. I am trying to decide how much background info I need to use a given sensor and its associated libraries. I don't want to treat them as "black boxes"
@hearty edge I have to go out for a while. I'd suggest starting with the current driver and then modifying it, as opposed to using it as it is, because it's set up for a particular style of use (hence you can't write the registers yourself).
@hearty edge the library is too much of a black box in this case? you're going to want them to understand the registers?
@ @tidal kiln @tulip sleet I guess that the ideal thing would be to have some more examples that could be used to explore the capabilities of a sensor. The libraries reference the information provided on the data sheets, but it's not obvious to a novice how to explore/implement the functionality.
sounds like maybe the examples are too simple?
or is there functionality of the sensor that is not currently implemented in the library?
@tidal kiln Examples are too simple (IMO)... The libraries look to be very complete.
ah. ok.
it's a trade off
for each library we want to have, at a minimum, a "simple" example that truly is very simple
not much more than a "hello world" for the sensor
some libraries will have additional examples that explore things further
or maybe covered by guides in the learn system
the 840 has zigbee!?
@tidal kiln BTW - I am a BIG fan of everything Adafruit has done and continues to do. I just usually approach learning things with the idea that I will eventually have to explain it to someone else. What I need to do is to get more proficient with Python. Do you have any recommendations that would be particularly geared towards Circuitpython?
did the 8266 support wifi in 3.1.1? or just running on it
anything Python would be fine, it should translate fine to CircuitPython
CP tries to do everything in a way that's backwards compatible with CPython - which is what you're probably running on a PC
this tries to explain some of the main differences:
https://learn.adafruit.com/circuitpython-essentials/circuitpython-expectations#differences-between-circuitpython-and-python-18-7
@hearty edge we do have a guide that shows going thru a datasheet to make a sensor driver. python's a lil different than C but i find it easier to code sensor drivers in python

Learn about porting an Arduino library to CircuitPython with the VL6180X distance sensor.
that may be helpful so youc an see the 'thought process'
@marble hornet it does support wifi, using mostly the MicroPython supplied modules
@hearty edge for books, if you're already a programmer, I can suggest:
https://www.amazon.com/Python-Nutshell-Desktop-Quick-Reference/dp/144939292X/ (front section has a concise introduction)
https://www.amazon.com/dp/0321680561/ (somewhat out of date (early Python 3.x) , but well written)
https://www.amazon.com/dp/1617294039 recommended by others but I have not looked at
@meager fog Thanks! I'll take a look. BTW - Congrats on the Forbes Top 50.
nav, thanks - and if you end up writing drivers let us know we'll include in the bundle! 😃
I'm an ME so not likely, but maybe a tutorial or two as I figure things out....
you'd be surprised ! there's a lot of mechatronics out there people like to use python with - you could have a lot to contribute 😃
@umbral dagger here for a few mins, lookin' @ LIDAR
Adafruit Industries, Unique & fun DIY electronics and kits : - Tools Gift Certificates Arduino Cables Sensors LEDs Books Breakout Boards Power EL Wire/Tape/Panel Components & Parts LCDs & Displays Wearables Prototyping Raspberry Pi Wireless Young Engineers 3D printing NeoPix...
Man, the maker world is getting so awesome!
I wish all this fun stuff existed when I was an 8yo dabbling with electronics.
me too! thats why i made some of it 😃
yay!
Thanks! I hope yet to get my kids excited by it, but it's harder now that there's so much electronic magic around them.
@umbral dagger 🤦 i forgot to ask if the spinning lidar could have the LEDs be on, if it isn't too much bother do you mind regiffin' but with it turned on
@tulip sleet mircopy code on cp for wifi ?
I'm building a model theatre for my daughter (Previously posted in #help-with-projects ). I want to have sound, lights and servo or motor control. I have a TrellisM4 which gives me the sound capability and the buttons to control everything. It has been suggested I buy an Itsy Bitsy to run the neopixel LEDs that will be the stage lights and the servos/motors to raise/lower the curtains. Can I connect the Itsy Bitsy and the TrellisM4 over I2C? How would I go about passing a key-press event on the TrellisM4 to the Itsy Bitsy to say, change the colour of the neopixels? Or actuate the servo?
One option would be to use serial
@ruby atlas Ok. I am a novice with CP. I have read through a learn guide on I2C - SPI but it was about connecting a sensor not microcontroller to microcontroller. Are you aware of any sample code that may give me a starting point?

The next step in learning CircuitPython.
The JST port can be used as I2C, ADC, or UART.
https://www.adafruit.com/product/3938 Finally, a 4 pin JST hacking port is available for extra add-ons. It's STEMMA and Grove compatible, and provides GND, 3.3V power, and two pins that can be used for I2C, ADC, or a UART. So connect some other sensor, or read stereo audio in, or maybe hack together a MIDI port. Whatever you like!

We got a big ol' blender and tossed in an ItsyBitsy M4, two NeoTrellis boards and an electret mic amp - turned on the 'mix' button and out came the NeoTrellis M4 - a super fun ...
https://www.adafruit.com/product/3800 can be powered from the 3.3v of the STEMMA port making it a single wire bundle (4 wires) to connect the two boards.
What's smaller than a Feather but larger than a Trinket? It's an Adafruit ItsyBitsy M4 Express featuring the Microchip ATSAMD51! Small, powerful, with a ultra fast ATSAMD51 Cortex ...
The ItsyBitsy M4 Express can also play audio files.
There are sooo many awesome boards 😃
I ❤ my ItsyBitsy M4 Express. I can't wait to get the Adafruit Grand Central.
You could also probably just use the Trellis M4 to control everything.
@meager fog Will do. After dinner.
@steep moth I have the same sentiment about the itsy m4
Aren't they great!
But that gc m4 🤤 more wam
That looks useful and I will read with care. I would be grateful for any code samples that specifically detail passing a key-press event on the TrellisM4 to an Itsy Bitsy. @ruby atlas Can I connect neopixels to the TrellisM4?
Signed up for the Adafruit Grand Central!
They are awesome, I started to use mine with Circuit Python, but I found it easier to accomplish my goals in Arduino, so I started using my M4 in Arduino.
@sinful sand yes. Let me find the pinout details. Neopixels just need data and power.
I hope the Grand Central is not too expensive. I think it will probably be around $40, which is kind of out of my price range.
What is this Arduino you speak of, I've Never heard of it?😉
My guess is 35 🤞 but once it is out one could easily make their own (via copy)
Like as part of a project
I bought my TrellisM4 because of the M4 chip, the large memory, the sound capabilities and of course the LEDs/buttons!
hrm, i can't find the pinout details for the board beyond a few mentioned on the learn guide.
Is the trellis m4 256 k ram or 192?
i don't feel like figuring out how to read the board/schematic file 😃
"512 KB flash, 192 KB RAM"
I have had a lot of fun with mine - who doesn't love light-up buttons.
It now has a new silkscreen on the back.
Trellis M4 = SAMD51G19A, GD25Q64C flash. Metro M4 = SAMD51J19A, S25FL116K, S25FL216K, GD25Q16C flash.
(per boards/*/mpconfigboard.mk)
Same chip so same ram makes sense.
I saw that. I think I'm glad I have one of the 1st ones.
I have one from the adabox010 and 2 more for the kids I got shortly after that also ahve the fancy silkscreen.
I've got one currently doing an FFT spectrum analysis of the music pumping out of my mixer to my office 😃
They do look nice.
They were out of stock on the acrylic cases, so I designed an OpenSCAD 3d printable case.

This is a snap-fit case for the Adafruit Trellis M4 board and buttons.
The OpenSCAD files can be easily modified to support multiple boards or to add support for adding NeoTrellis boards. Keep an eye on this project for updates that support 8x8 or 4x8 cases.
This is design...
I can't see a way of controlling neopixels and a servo with just the JST/STEMMA port. Other than via another MC.
You'd have to send control sequences to something like the trinket.
More thought required and hopefully some example code to connect two MCs. Off to bed now, it is late in GMT land.
There was another community member communicating between two Itsy Bitsys but I don't remember who.
They were using UART afaik.
i want to do UART to feather M4 to feather adalogger
Hmm i really wanna know what the grid of pads is on the back of the trellis m4.
OpenBoardView installing 😃
that didn't work
next
eagle has a free version
ty
@tulip sleet, are you skilled enough with git to know how I could get that patchset for samd51 into a more recent openocd?
@meager fog New gif in place. I replaced the guide thumbnail as well.
git cherry-pick?
Is there a wifi coprocessor guide yet?
No.
@marble hornet Dumping notes from jerryn to you:
https://discordapp.com/channels/327254708534116352/327298996332658690/527997507054338058
/usr/local/bin/esptool.py --chip esp32 --port /dev/ttyUSB0 --baud 115200 --before default_reset --after hard_reset write_flash -z --flash_mode dio --flash_freq 40m --flash_size detect factory_WROOM-32.bin
https://github.com/adafruit/Adafruit_CircuitPython_ESP_ATcontrol
@ruby atlas -- you can use teh library from here (I htink it is in the latest bundle as well) and the demos in the examples should work -- see the demos code for the pins to wire up -- GPIO15 is critical for flow control - you need to connect RX,TX,VUSB,GND,GPIO15,RESET from the ESP32 to the metro M4 -- swap RX/TX - use the recommended or any other GPIO for the GPIO15,RESET(edited)

GitHub
Contribute to adafruit/Adafruit_CircuitPython_ESP_ATcontrol development by creating an account on GitHub.
HTH
@ruby atlas @marble hornet https://learn.adafruit.com/adding-a-wifi-co-processor-to-circuitpython-esp8266-esp32

Surf the 'net with Blinka!
oh!
that would have helped me 😃
There's so much stuff on the adafruit learn system now I find it hard to navigate.
@ruby atlas I totally! Agree.
I think my adapter speed might've been too high. I have working breakpoints!
I also updated openocd
I'm using the segger jlink and arm-none-eabi-gdb-py build-metro_m4_express/firmware.elf -ex "target extended-remote :2331" 😃
yeah I'm doing some super janky openocd raspberry pi stuff
And thanks @idle owl
I think I'm on my way to success
here I have a comparison of oscctrl bits on my rust program and on arduino
heh 😃
now I just have to look up all the ones that are different
@meager fog I'm seeing the Garmin guide, on 'learn.' but without a live link.
@umbral dagger heya back - https://learn.adafruit.com/garmin-lidar-lite-range-finder ?

Measure distances using lasers. LASERS! No sharks, though.
@meager fog It's good now.
thanks, sorry had to hit a button
ok i checked off the 3 that went live!
whatcha wanna do next?
Nice simple learn guide. Nice!
@umbral dagger how bout a 2d lidar with a pi, you wanna try writing a library for it?
@meager fog I was wondering about using a Feather M4 (possibly the Grand Central?) for that.
feather m4 would do a fine job
TG, there's an existing guide. thats what we have now. no ETA for more, its very alpha and experiemental!
my metro m4 randomly can't write to 0x00006000 anymore
@meager fog okay, subject to change then? Should I be worried about working changes or am I fine PCB wise ?
@exotic pumice external or internal?
@marble hornet huh?
oh, internal
afaik
maybe I'll try a uf2 on it to see if that unlocks it somehow
On the chip or as part of the USB drive ?
Can you paste the error ?
Ah. Can you run earse file system with a trinket firmware?
Or wire an Arduino sketch ?
Error: SAM: NVM programming error
Error: Failed to erase block containing 00006000
Error: SAM: failed to erase sector 3 at 0x00006000
Error: failed erasing sectors 2 to 4
Error: flash_erase returned -4
(gdb) load blinky_basic.elf
Error erasing flash with vFlashErase packet
@exotic pumice I wasn't sure about the openocd patch set, if it even came from git. You would use the patch command, not necessarily git. I wish it was just in a repo somewhere.
yeah it is a git repo it's just not on github
What programming tool are you using? Jlink?
ok so i did more testing tonite, and used the mu plotter to get a sense of the data and it seems really spikey, did you notice this too?
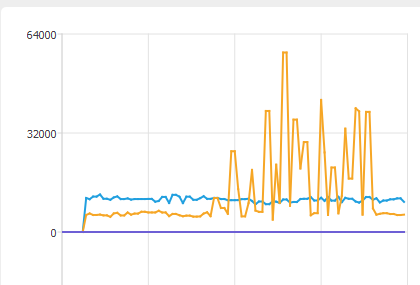
it's a bit jank
it was working pretty well for the past few hours though
now all of a sudden, can't write
I've power-cycled and run a bunch of stuff that's supposed to erase and clear protection flags
to name a few
atsame5 chip-erase
flash write-image erase unlock
flash erase_address unlock
i have no real experience with openocd, unfortunately
Neither myself
yeah
Have you tried running the bin without over uf2. Like loading cp.bin into memory?
or, you can convert all the .bin's to uf2, and load that way
uf2conv.py is in the circuitpython repo and also the uf2-samdx1 repo
with the j-link mini edu, you can run the gdbserver also and use the load command
it means the bootloader is running, waiting for an upload (UF2 or arduino style)
oh I fixed it
I loaded through a separate openocd command, and then loaded through gdb as well
weird
my clocks bleeping work!!!!!!!!
samd51 hal ready to go possibly
this is huge for me
great! gotta say good night! but congrats!
g'night @tulip sleet
Night @tulip sleet
Sleep well
Separately
Can you scan for IP addressssss over at?
Ah, okay
I see
I think you can get a list? @marble hornet
Do you see example code?
GitHub
Contribute to adafruit/Adafruit_CircuitPython_ESP_ATcontrol development by creating an account on GitHub.
that's access points
you'd probably have to ping a range and see who responds
Hmmm okay.
ahhh IP's sorry yeah thought you meant list of access points
on a PC I'd use nmap, on an ESP idk really
Is this English ?
lol
Nmap Free Security Scanner, Port Scanner, & Network Exploration Tool. Download open source software for Linux, Windows, UNIX, FreeBSD, etc.
what is your use case?
Making a wifi connected device where consumers would set it up
A wifi flow guage
So it needs to be connected to a phone or something somehow
Wifi does need to happen
For it though
Am I being clear? Am I englishing ?
why do you need to scan for IP addresses?
@exotic pumice did you need to change the BOOTPROT like i need to to get it to write?
no, I just wrote with a different command and it seemed to clear things up
it wasn't even in the bootloader range I don't think
have you guys seen this micropython talk at 35c3? https://www.youtube.com/watch?v=xCPnOxWxHIc

https://media.ccc.de/v/35c3-9648-micropython_python_for_microcontrollers How high-level scripting languages make your hardware project beautifuly easy MicroP...
just checking it out now and thought you guys might be interested
I don't use python because i use c and c++ now for 30 years but i will download the video and listen. Thank You @exotic pumice
Hi
hey @timber mango! 👋
@exotic pumice I watched the video...very interesting....I must explore further. Like Mike, I'am far more used to C/c+ and java than python. I watched another presentation by the creater of micropython and it's apparently being used in some serious stuff. Interestingly he did question the need for circuitpython as an "easier" version of python.
I try to write a driver to use the M4 board as two neotrellis
to be able to put everythong in one multitrellis instance
so I try to understand how neotrellis (with Seesaw) works to do the same with the trellis M4
i haven't used or delved too far into either of them, yet. i imagine you could interface them over I2C with the Seesaw (SAMD09). are you on working on the C side or the Python side?
only on the python side
but I need to understand what data the seesaw is sending over I2Cto code the same behavior on the trellis M4
@pastel panther Thanks for reviewing/approving the rfm9x. If you have time would you also take a look at thr rfm69 -- same fix https://github.com/adafruit/Adafruit_CircuitPython_RFM69/pull/14 -- cut/paste is dangerous thing 😉

GitHub
Corrects an error if packet header receipt is enabled but packet is not addressed to recipient and filtering is enabled.
hey, i'm looking to use this: https://www.adafruit.com/product/1400 to switch power in project (the tricorder) but the button can't be physically pressed. i see that the output of the nand gate is connected back to the input by a not gate. can it be hacked into it somehow? else could i please have some mosfet help 😅 (i'm not great at them) . other suggestions welcome too. thank you either way

The Adafruit Push-button Power Switch is a tidy little design that lets you control a DC power source using an everyday tactile button. The breakout uses a latching analog circuit that is ...
please 😅 😀
i have a capacitive touch sensor as an input rn
@timber mango in looking at the NeoTrellis library, seems that it's just using the Seesaw library. So, that should give you some insights.
NeoTrellis importing Seesaw: https://github.com/adafruit/Adafruit_CircuitPython_NeoTrellis/blob/master/adafruit_neotrellis/neotrellis.py#L51
Seesaw library files: https://github.com/adafruit/Adafruit_CircuitPython_seesaw/tree/master/adafruit_seesaw
@marble hornet so you want to replace the pushbutton with your cap. touch switch?
so - can't you just do that in the circuit? or is the cp touch also powere y the same source. Is that the problem?
the cap touch is separate (it's the same regulator output but turning off the rail to the m4 and sensors )
i'm just really bad at using mosfets and transistors (smd) i can rarely get them to work. the m4 and such will draw more current than the cap chip can provide
right -- I am by no means an expert on ths, but it looks likea good place for a transistor -- the Cap touch would just turn the transistor on/off to close/open the point where the pushbutton is. Does that make sense?
I would think momentary -- just like the pushbutton
while the button/captouch is pressed, the circuit is closed.
is it possible to remap TX and RX? was thinking of putting a feather and hallowing together but the RX and TX will be in same place.
i already tested so if anything crazy happens when i connect the two running different stuff, hallowing was running slide show, and adalogger was logging sensor data
in addition to the pushbutton! okay now i;m on the same page.
or instead of it -- I was just saying that the pusbutton action is more like momentary than toggle.
it makes contact while it si pushed
i have a bunc of these laying around. (i agree, i though the transistor was replacing the pushbutton board, now i see what your'e thinking, 👍 )
ok -- I thought just just wanted to hack into that board.... may be a much simpler way to do it.

Transistors are powerful little electronic switches, and we really like these NPN and PNP transistors whenever we need to control medium-power electronics, such as small motors, solenoids, ...
yeah. i'm reordering the board with touch so i don;t mind changing to toggle
there may be a much simpler way just using the cap touch and a transitor or mosfet alone.
I was focuse d on how to tap into the circuit you posted -- not on the implmentation
you might want to jump over to #project -- there are some folks there who may be of great ehlp.
wheee:
WARNING: CPU could not be halted
Failed to halt target device on connect```i was light on implementation description. however the hacking would be quite fun. (too space inefficient though if just a transistor would work)
thank you @solar whale i'll take a jump over
{ MP_ROM_QSTR(MP_QSTR_TX), MP_ROM_PTR(&pin_PA10) },
{ MP_ROM_QSTR(MP_QSTR_RX), MP_ROM_PTR(&pin_PA11) },
thats what I meant
i change those two right?
I think you just figure out which pins are available to be tx or rx on the sercoms and then tell busio to make a uart out of them
TX and RX are not something specail just name of pins? i can just change code around and it works?
The code you pointed at is just binding the names
They can only be sercom pins
There's a script somewheres that tells you which
one board id do this ?
busio.UART(TX, RX, baudrate=115200, timeout=3)
and other board this?
busio.UART(RX, TX, baudrate=115200, timeout=3)?
@upbeat plover since the pins are physically tied together, I don;t think you can use them to communicate between the boards.
since thay have to cross over between the boards to work.
okay ill have to do something else then, like use a statemachine and just check up or down between pins
The link I posted is a script that tells you which pins can be UART
@exotic pumice i ran script has long printout
perhaps I'm wrong -- if you rediine the pins on one side to swap RX/TX, then I think it should be OK - pin is just a wire.
D0 is not a TX pin so i dont think i can just switch code around
yo would have to rebuild CP with swapped pins on one board
If the script tells you you can, you can. That's the magic of sercoms
It's from the guide here https://learn.adafruit.com/circuitpython-essentials/circuitpython-uart-serial
The next step in learning CircuitPython.
hmm ill have to run it on hallowing but looks like i can use different pins and do what i wanted
Yep, whatever pin combos the script tells you, just do busio.UART() and you have a new UART
Getting rid of the old one is a separate problem
I guess that's actually what you want. Sorry.
How do you get rid of old ones?
I guess it probably uses the one bound to the name like you were showing before as the main one
MP_ROM_QSTR....
okay so in pins change those to the new ones i see?
Try it and see
alrighty
I've never done it before
might take a bit, but ill update once boards are running changed CP
@upbeat plover which board are you runnig the modified CP code on?
both
hallowing and feather M0 adalogger, changed both D6 to TX and D10 to RX
building now
OK but I' confused don't you want to cross TX/RX between the boards
oops orignal problem forgot to switch lol
and you can't use D0/D1 on those boards? just swap on one of them?
hallowing d6 = TX d10= RX, adalogger D6= RX d10 =Tx
have yet to test anything came here with my thoughts first
D0 would not have worked not a sercom
on which board?
both its not TX
ok -- I was looking at a diferent board (ItsyBitsyM4) it is on that one.
anyone have a simple script to test this with?
@idle owl i was listening to the weekly again and wow that was an impressive amount of work you did !
😊 Thanks!
@upbeat plover ah -- now I see -- not on hallowwing -- too bad.
moddified CP on both boards now
oos -- ignore taht old version -- just a sec
@upbeat plover here is the alpha5 compatible version ```import board
import busio
import time
RX = board.RX
TX = board.TX
with busio.UART(TX, RX, baudrate=115200, timeout=3) as uart:
while True:
data=input()
if "reset" in data:
uart.write(bytes("\x03","utf-8"))
uart.write(bytes("\x04","utf-8"))
else:
uart.write(bytes(data+"\r"+"\n","utf-8"))
getresponse = True
while getresponse:
response=uart.readline()
print(response)
if(response == b'' or response == None ):
getresponse=False
Invalid Pins😬
??
yeah no clue why, im gana edit build and see if i remove the D6 and D10 and only have the PA to RX and TX
where do you get the "invalid" pins message?
line 8
post the code you are running
i copy pasted the alpha5 , where the time is 3 and not 3000
but did you remap RX/TX in your build -- try using D6/D10
building new CP right now with D6 and D10 removed and only having them as RX and TX
okay, ill try default CP next with D6 and D10 defined where they go
that is what I meant -- use D6/D10 in the script - with your modified CP
@raven canopy thankyou. I'm looking at the seesaw lib but I don't fully understand what the seesaw keypad does and send over I2C
I guess I have to experiment a little with neotrellis first
@solar whale everything i try gives invalid pins for line 8
even current CP build with RX and TX pins lol
so in the script you replaced RX with D6 and TX with D10 -- in both places
@tidal kiln heya i can review the guide now
what __ can you post the code and error mesasge that fails on current CP?
import board
import busio
import time
RX = board.RX
TX = board.TX
with busio.UART(RX, TX, baudrate=115200, timeout=3) as uart:
while True:
data=input()
if "reset" in data:
uart.write(bytes("\x03","utf-8"))
uart.write(bytes("\x04","utf-8"))
else:
uart.write(bytes(data+"\r"+"\n","utf-8"))
getresponse = True
while getresponse:
response=uart.readline()
print(response)
if(response == b'' or response == None ):
getresponse=False
main.py output: Traceback (most recent call last): File "main.py", line 8, in <module> ValueError: Invalid pins
with CP alpha 5
that fails on current master CP -- or your modified CP?
current master
oh
whew! thanks @meager fog
okay ill try moddified again
Hi all
I new to IOT 😃, but have been lurking on adafruit.com for some months now looking components and guides over. It's been ~10 years since I did C# and VB.NET development, so I thought CircuitPython was a good place for me to start anew. As a first project I want to read (using the https://learn.adafruit.com/using-ds18b20-temperature-sensor-with-circuitpython/hardware guide) temperatures from some 1-wire DS18B20 sensors I have been using with my smart house installation (www.loxone.com) and post these to a API interface on the smart house controller. I have therefore purchased a Feather HUZZAH ESP8266 board and have successfully flashed it with CircuitPython 3.1.1. My next step was to connect board to my WiFi network, but I'm not actually sure how to do that using CircuitPython as the most relevant guide, I have found so far, (https://learn.adafruit.com/adding-a-wifi-co-processor-to-circuitpython-esp8266-esp32) assumes that the Wifi board is the HUZZAH ESP8266 Breakout board running ESP8266 AT firmware and being managed from a Feather M4 Express running CircuitPython.
Is is unrealistic for a newbie like me to do everything on my single Feather HUZZAH ESP8266 board running CircuitPython?

How to connect and use a DS18B20 one-wire temperature sensor with CircuitPython!
is there some kind of check in busio im missing?
doc, you could - but we are sorta moving away from useing the bare esp8266 with circuitpython... might be better to try micropython for your project
@upbeat plover -- what happened?
doc, this is the only circuitpython wifi on esp project we've published https://learn.adafruit.com/circuitpython-totp-otp-2fa-authy-authenticator-friend/software - but it did work

Keep accounts secure without frustration
invalid pins still, i tried current CP and just do RX = board.D6 and it fails
@hexchat the wifi stuff is the same as for micropython, so you can use those guides
but when i run the UART_Test_Script it says D6 is both RX and TX
I think that measn it can be either, but it is defined as one of them
it fails and says Invalid Pins if RX is anything other then PA11
Thanks ladyyada. I'll have a look at the 2FA TOTP guide 😊
or TX anything other then PA10
ill think ill just do as you suggested and cut and jump, make it cross pins physically
taht is on current CP -- on which board -- hallowing?
yea hallowing
taht is how it is defined on adalogger
rX = PA11, TX = PA10
not on Hallowing
on Hallowwing RX = PA09 TX = PA10
@upbeat plover I have to go AFK for awhile -- I suggest double checking how things are defined -- good luck.
on both boards it wont let me change RX or TX
I think this is a very basic question but I've been struggling with it and would appreciate some help. I'm using the Hallowing and using capacitive touch to trigger an led blink. Using the built in led on pin 13 works as expected but when using an external led through any GPIO the light is on by default and then blinks as expected with touch. I'd like that led to be off by default. I think I need to pull it down but haven't been successful as that doesn't seem to work on outputs. I checked and the touch value is responding as expected. Here's a simple example: https://gist.github.com/pdbartsch/c01440f60d5d9c24917bc1820cd3b664 Thanks in advance!

Gist
Simple example to illustrate my problem using an Adafruit Hallowing with CircuitPython. When using the built in red led on pin 13, the light remains off until I ask it to turn on with the capaciti...
im going to delete my CP and get from git again
@valid falcon How do you have the LED wired up?
@steep moth positive to 3v and negative on GPIO pin 9
Try connecting negative to GND and positive to GPIO pin 9.
@steep moth Haha. Thanks! I knew it was simple but not THAT simple.
@valid falcon You're welcome. Have a great day.
@steep moth you too!
@tidal kiln p0ngz
@meager fog p1ngz
sure thing
ok assign me the review once you have the PR in
it's just fork/add/PR?
ok...should only take a sec...
having all our code examples in one spot makes it easier manage 'em
featherpins = RX is PA18/D10, TX is PA20/D6
hallowingpins= RX is PA18/D6, TX is PA20/D10
does that seem right?
trying to UART a hallowing and feather adaloger with the feather just plugged into back of hallowing
can try. my outbound pipe is reaaalllyy sllloowww today. trying to get that learn PR up. sry.
oh noo! want me to do the code PR?
here's my PR
turns out we need more codes to detect the 'warranty' bit on a raspi
i tested it on a pi and i have a person who can test after its pulled - so i dont think its a biggie
the plumbing on all this has changed since last time i looked at it
where's the Detector class?
@tidal kiln its in init?
I wonder what versions of the Pi I have scattered around.
so there's no attempt to parse out the info. just a straight compare to value?
thats right
At least a 3 B+, several 2s, and at least on pre-2 model.
yeah
ok. now that i'm up to speed....PR looks fine. basically just adding in those other possible values.
I was using wrong pins looks like D1 and A3 will work with just code no CP changes
feather_m0_adalogger; RX = A3, TX = D1
hallowing_m0_express; RX = D1, TX = A3
@upbeat plover nice! I guess it's OK as long as neither pin is the same on both.
so if i got that code running on one and send this from other i get this
>>> uart.write(bytes("hello"+"\r"+"\n","utf-8")) 7
@upbeat plover AS for stacking feathers (not wings) in general, I was concerned there were some possible conflicts on some of the power/battery pins -- I don't see any problems, but it's worth checking carefully
definately don't ever power both!
@meager fog guide code PR finally up
@tidal kiln checkin!
merged!
@tidal kiln fixed that missing code - wanna approve?
(once travis' done)
done
thanks!
So what's a warranty bit? Does it void if you overclock or something?
i forgot how painfully slow the build is in Vagrant VM. even after i bumped the available memory in vmware. 😴
interesting, builds are about the same speed in parallels for me.
VirtualBox* (maybe that has something to do with it?)
do you have VT-x enabled? (and/or VT-d)
i don't think so. read some warning somewhere when i started with the vagrant, iirc.
VT-x significantly speeds up virtualization by reducing overhead
assuming virualbox supports it
i haven't use vbox in a long time
vbox does. vagrant seems hit or miss in my re-googling.
vagrant should use whatever virtualization you tell it to use
well, it seems to be picky on implementation...
and, yes, VT-x/AMD-V is enabled. 🤷
on Windows, and vagrant+linux VM doesn't support Hypervisor; which is what i was conflating with VT-x
hmm. this note from Vagrant may be a bigger issue, actually:
Windows users: NFS folders do not work on Windows hosts. Vagrant will ignore your request for NFS synced folders on Windows.
(i use vagrant for shared folders, since i debug in Atmel Studio vs gdb)
G'day Limor, Happy Holidays!
What kind of touchpad setup did you have? The physical setup is quite
finicky, more so than for example the ESP32's self-oscillating method.
To get decent readings out I used a grounded backplane and a thin
insulating layer over the touch sensors.
I've attempted to clean up the signal using a linear regression (of
sorts) to estimate but we might need to do some experimentation and
stick some constants into boards/*/mpconfigboard.h to tune the
algorithm per boa...
when stacking feathers i get an issue "OSError: no SD card"
but when they are not stacked everything works fine
here is code for feather
import board
import busio
import digitalio
import adafruit_sdcard
import time
import storage
# LEDs
redled = digitalio.DigitalInOut(board.D13)
redled.direction = digitalio.Direction.OUTPUT
greenled = digitalio.DigitalInOut(board.D8)
greenled.direction = digitalio.Direction.OUTPUT
# SD card
spi = busio.SPI(board.SCK, board.MOSI, board.MISO)
cs = digitalio.DigitalInOut(board.SD_CS)
sdcard = adafruit_sdcard.SDCard(spi, cs)
vfs = storage.VfsFat(sdcard)
storage.mount(vfs, "/sd")
# write to SD card
def sdwrite(sdlog):
with open("/sd/wowecho.txt", "a") as fp: # open to add line to log.txt
redled.value = True # turn on Red LED when SD in use
print(sdlog) # print what your about to write to SD
fp.write(sdlog) # write to SD
fp.flush() # what does this do, hope it helps????
redled.value = False # turn off Red LED when SD is done
uart = busio.UART(board.D1, board.A3, baudrate=115200, timeout=3)
while True:
greenled.value = True
data = uart.read(32) # read up to 32 bytes
# print(data) # this is a bytearray type
if data is not None:
greenled.value = False
# convert bytearray to string
data_string = ''.join([chr(b) for b in data])
sdwrite(data_string)
and code from hallowing
import board
import busio
import time
uart = busio.UART(board.A3, board.D1, baudrate=115200, timeout=3)
uart.write(bytearray('hello'+"\r"+"\n"))
it writes so fast i dont even notice LEDs change most of the time
are you stacking two feather m0/m4 boards, or two wings on a board?
@upbeat plover the hallowing isn't really a wing, so you can't stack it on a feather
You might have to cut some pins. The hallowing is probably causing interference on the spi lines.
sck is the pin
i checked all pins
@tidal kiln so far these two seem okay with eachother, ill have to test more like TFT and sensors and all that
@upbeat plover i think what ArduinoUno17 and cater are saying, is that if you have the full header pin connecting both boards, then SCK/MOSI/MISO are connected on both boards. this may be causing some signal interference on the Adalogger when it tries to communicate with the SD card; the Hallowing's SPI pins may be sinking the voltage low. recommend that you only have power (V/GND) and UART (RX/TX) connected between the two boards...
here's a happy gif for anyone who was following my samd51 rust project
https://i.imgur.com/Jcq80Eu.gif
no blinka involved
thanks to everyone that helped me get to this point
For those of you that have been listening to me/watching me work on pixelbuf:
32 pixel array, Feather M4 - Runtimes in seconds for a 256 loop wheel():
neopixel.py brightness=0.1 7.31797
neopixel.py brightness=1.0 5.42851
encapsulated pixelbuf 1.75293 (python settem, getitem wrappers)
pixelbuf neopixel_write 1.69814
pixelbuf neopixel_write via python 1.68467
direct common_hal_neopixel_write 1.6835
I'm going to see how non-sliced setitem performs next. That may make the decision easier.
nicely done @ruby atlas! i envision many happy "blinka blinkers" when you're finished...
animated blinkas i imagine
and...how is that not a team name i have heard of? "Our next competitors for the Annual Retinal Trickery Competition are...Blinka's Blinkers!"
i like UART
just looking at itsybitsy m4, very cool that swclk and swdio are first class pins
I gotta get me one of them
now I see why you guys mentioned the itsybitsy when I was looking into making a swd implementation
@upbeat plover @raven canopy regarding the stacked feathers, it should be OK to stack SCK,MISO,MOSI -- they are a bus and are norammly shared amond all SPI devices. I'd look elsewhere for the conflict.
it was SCK, i detached it and so far no further problems
hmm -- I guess that makes sense now that you mention it -- only one board can provide the clock. wings dont do that. .. there is more to stacking feathers than meets the eye -- be careful out there....
yes for sure, i was going to try m4 but couldnt even find good pair of pins for TX and RX
@upbeat plover I think the same script for finding tx and rx would run on m4
yeah it does, i mean pair for both boards that line up well when stacking
oh I see
Hallowing has accelerometer, TFT, and external si7021 sensor all going, sending; temp, humidity, x y z G, and Lightsensor analog value over UART to adalogger and adalogger puts that all in a txt file on SD card
really seems like its working so far
@umbral dagger I tried to point this forum post you your blog about updating the feather M0, but the blog link is broken https://forums.adafruit.com/viewtopic.php?f=57&t=145597&p=719369#p719369 -- Do you want to comment on it?
@solar whale Done. I seems to have not turned https support on when I changed hosting.
just using a wire, but it needs to be stable no matter what the method - did you add a way to test with an optional charge gpio pin? that should work more consistantly :)
So I'm new at this but not programming, I'm using a CPX and i want it to throw some keyboard commands when I hit real momentary pushbuttons so my F/A-18E's APU will be just like the real one. Anyway here's my code:
import time
import board
import digitalio
from adafruit_hid.keyboard import Keyboard
from adafruit_hid.keycode import Keycode
kbd = Keyboard()
apu = digitalio.DigitalInOut(board.A1)
apu.direction = digitalio.Direction.INPUT
apu.pull = digitalio.Pull.DOWN
while True:
if apu.value:
kbd.send(Keycode.A)
else:
print(apu.value)
time.sleep(1)
problem is all I get back is false.
I have a normally open momentary hooked to ground and A1
but oddly enough, if I take it to the REPL, I can get apu.value of false and I get true when I press it. I must be missing something real easy. Sure enough it was easy. Momentary switches need to be pulled up and then given an IF not statement instead. Like So:import time
import board
import digitalio
from adafruit_hid.keyboard import Keyboard
from adafruit_hid.keycode import Keycode
kbd = Keyboard()
apu = digitalio.DigitalInOut(board.A1)
apu.direction = digitalio.Direction.INPUT
apu.pull = digitalio.Pull.UP
while True:
if not apu.value:
kbd.send(Keycode.A)
time.sleep(1)
kbd.release(Keycode.A)
hello, if I have questions to the usage of a circuitpython-lib, where should I ask?
I try to run the example of the adafruit_lidarlite circuitpython lib, but the only thing I get, are exeptions. The LIDAR works with the Garmin Libs (and same wiring) without problems ...
@light plaza this is the place to ask -- post your code and the error messages and people will try to help when they are online.
also let us know what microcontroller board you are using and what release of Circuitpython.
Feather M4 Express, CircuitPython 3.1.1 with the Library-Bundle.
code (lidarlite_simpletest.py):
import time
import board
import busio
import adafruit_lidarlite
Create library object using our Bus I2C port
i2c = busio.I2C(board.SCL, board.SDA)
Default configuration, with only i2c wires
sensor = adafruit_lidarlite.LIDARLite(i2c)
Optionally, we can pass in a hardware reset pin, or custom config
#import digitalio
#reset = digitalio.DigitalInOut(board.D5)
#sensor = adafruit_lidarlite.LIDARLite(i2c, reset_pin=reset,
configuration=adafruit_lidarlite.CONFIG_MAXRANGE)
If you want to reset, you can do so, note that it can take 10-20 seconds
for the data to 'normalize' after a reset (and this isnt documented at all)
sensor.reset()
while True:
try:
# We print tuples so you can plot with Mu Plotter
print((sensor.distance,))
except RuntimeError as e:
# If we get a reading error, just print it and keep truckin'
print(e)
time.sleep(0.9) # you can remove this for ultra-fast measurements!
The error-Messsage(s):
Measurement failure
@timber mango I don't see anything obvious -- hopefully some familiar with that sensor or the library will be online later. Do you have the RESET line wired in - Does the Garmin Software use that?
@solar whale No, I do not have the reset-line wired in.
I have only the 5V, GND, SDA and SCL lines wired and I have attached two pullup-resistors to 3.3V and the capacitor, that the LIDAR manual shows.
If I use the same configuration for a L3GD20 sensor and change only the SDA and SCL wires, I2C works as expected with the circuitpython adafruit_l3gd20 -lib.
If I have the LIDAR wired and exchange the feather M4 with feather M0, that runs the Garmin Arduino Lib, the LIDAR works fine.
So it seems, that the only thing, that does not work, is the adafruit_lidarlite. But I cannot imagine this, because it would be the first time, that a adafruit - lib does not work ...
@timber mango Is it a 5V device or 3.3V -- the Feather M4 expect 3.3V signals for I2C
@solar whale It is a 5V device
does a M0 expect 5V?
and I have the pullup-resistors connected to 3.3V
The M0 is also 3.3 V so I don;t know but I would be careful connecting a 5V device to either one. I'll defer to someone with more harware experience to comment. Good luck -- I see you also posted your question to the forum so I hope you get some help soon.
Hm, but Adafruit is selling them (the Version without HP, that is 5V, too ) and they have a project (range finder), where they have wired it the same way as I do (even without pullups, but I have tried it without pullups, getting the same exceptions). And Adafruit is providing this lib.
It would IMHO make no sense, if they would sell hardware, provide a tutorial together with a lib, if it would not work from a power point of view, would it?
@solar whale and thank you for your comments
@light plaza I don't work for Adafruit - I was just trying to help and as noted I don't see any obvious problem. Hopefully the people who provided the library can respond when they are online. Good luck!
@timber mango Also feel free to ask in https://forums.adafruit.com, where paid technical support people hang out and can refer problems to the appropriate library writer.
@tulip sleet yes, I already did, but there was no answer, so I had a look into the chat, if here is a better place to ask ... I am not that familiar with the many "channels" Adafruit offers to communicate to its customers ....
@timber mango Could you give a link to your forum post? It can take a few days for a specialized response some time. Also, if you think there's a bug in the library, post an issue in its github repo. Discord is for more casual support and support by the community. Only a few of the support people monitor Discord
@tulip sleet Ah ok, here is the link to my forum-post: https://forums.adafruit.com/viewtopic.php?f=60&t=145569
@timber mango - it appears there are differences in the I2C details: http://blog.pistuffing.co.uk/garmin-lidar-lite-v3-vs-v3hp/
@tulip sleet ok, thank you, so the lib has to be adapted to the new registers? that leads to my seconfd question on the forum, How to do that 😉
and what I do not understand in this case: Why is it possible, to use the same version of the official Garmin lib for both LIDARs and why do they not mention on their github page, that there are differnces .... but, I will have a deeper look at these registers, to compare them.
I actually did a quick comparison, but there it seems, that the registers are the same .... so I have to look more accurate .....
@timber mango i think the regs are the same but the way they work is slightly different (based on that blog post above). The Garmin Arduino library probably handles both, but we don't (since we don't sell the V3HP and so didn't test against it).
there may be other clues in the vast internet, but that was the most promsiing link I found
@light plaza I replied to the forum post. As for the issue of 5 vs 3.3. It just worked when I hooked it up. I had an I2C level convertor on hand in case it was needed, but it didn't seem to be. I never encountered any issue during coding, build, & testing.
@light plaza There's (in garmin/LIDARLite_Arduino_Library) actually separate libraries and examples for each model.
my dad is using windows 8, should he install the windows 7 drivers ?
for cirpy
**and the drive isn;t showing up as a serial device
@marble hornet Yes.
Thanks
At least I have had three people do that and it worked, but I still make no real guarantees.
Apparently I'm going to need to trace execution to see where cycles are going. assignment of a single value (foo[n]) vs slicing is significantly slower than expected - worse than neopixel.py even. Except in one code path. Either way, I'd like to know why.
@light plaza do you have one of these? https://www.adafruit.com/product/2465
the guild shows you need one to make 3.3v power 5v
https://learn.adafruit.com/garmin-lidar-lite-range-finder/hardware

PowerBoost 1000C is the perfect power supply for your portable project! With a built-in load-sharing battery charger circuit, you'll be able to keep your power-hungry project ...
Measure distances using lasers. LASERS! No sharks, though.
<@&356864093652516868> Reminder: No Weekly meeting today! We won't be meeting again until 7 January 2019. Have a wonderful New Year!
awe
@idle owl i'm off today and tomorrow, if you want to chat cookie+pypi. @tidal kiln, @gusty kiln (and anyone else, really) would you be available & willing to participate? my only experience with the PyPi stuff is as a spectator, so your inputs would be helpful i think.
of course, i'll need to work out my mic issues from last week. 😄
@raven canopy Tomorrow should work. Today I'm headed out after an already-scheduled meeting. I don't think the discussion will be that involved, I already know what we can add and what we can't. And the general cookiecutter issues aren't PyPI related, they're bugs.
@upbeat plover hat I do not have such a PowerBosst Charger.
As far as I have understood the tutorial, I would need this, if I wanted to use a battery, but I do not want. "To make it mobile, we can use a LiPo battery and a PowerBoost to get 5v."
ahh. misunderstood (forgot?) the scope, maybe. just let me know...i have zero plans.
@raven canopy Scope is we're adding as much of the PyPI stuff to cookie as possible to get it out of the way since basically everything is going on PyPI. And there are a couple of unrelated issues.
I'll ping you tomorrow!
@tulip sleet if the registers are the same, do you have an idea, how I could find out, where exactly the differences are?
Does anyone out here have experience with the mcp9808 temperature breakout board?
@raven canopy Or depending on when the meeting ends, maybe today, but probably not.
@timber mango i would hope the data sheets show the differences (not necessarily explicitly). As @umbral dagger mentioned in the forum, it sounds like the Garmin-supplied drivers cover both V3 and V3HP, so that could could be taken as "truth". @umbral dagger said there are different versions for the two variants (? I haven't looked at the Garmin library)
does an open drian output mean it defaults to gnd?
@idle owl all good. we can just mark it for tomorrow...early dismissal from a meeting should never be rewarded with another meeting! 😜
It almost always is 😃
troof.
@marble hornet the drain is usually
yes, usually, the drain is on top and is "open" (not connectted to anything)
thank you
(picture is from elsewhere, not wikipedia article)
Finally getting back into the serial comm issues - holidays took me out.
@tulip sleet ok, after looking into the zip file, I saw, that there are indeed two versions, one is called LIDARLite and one is called LIDARLitev3HP ... so - as you said - inside of them must be the truth 😉
@tulip sleet I've added debugging at the Python level - basically its never returning from input() when the string is sent from the command line (via echo)
From minicom it does... that will push me to look at how we're calling the readline lib...
@light plaza Between the Garmin libs and datasheets, it should be easy to create a 3HP module.
@tough flax We're in a meeting for a bit here, fyi. So there will be a bit of a delay in response.
Sorry - didn't realize
No worries! Simply letting you know so you're not wondering 😃
@marble hornet you still working on that mini M4?
yeah
i kinda want one
what do you wanna use it for?
nothing special just shrink a project
that's pretty cool, how many you get made at a time? do you do a whole bunch to check manufacturing process is good?
@tulip sleet @tidal kiln @idle owl I am not sure this is a CP issue, so I created an issue in my client code repository to track the analysis on this - we can move results over https://github.com/ATMakersOrg/Little-HandRaiser/issues/1

GitHub
I thought I'd make a place to store the progress on this - I'm not sure it's a CircuitPython issue yet. The problem is that when trying to send data to CP from linux, the input() method...
greetings
i have a question
i want to have the itsy bitsy m0 provide a raw bytestream over usb since i need a fairly high bitrate for something
500+ kb/s
i think USB is limited to 115200?
@carmine kestrel i can't give any concrete yes/no on possibilities; my understanding isn't strong enough to be definitive. however, here are some things to consider. the M0/M4 are USB Full Speed compliant, which means theoretically the bitrate is 12Mbps; practical speed is much less (1-9Mbps based on googling, with most results in the lower range).
if you are using CircuitPython, i don't recall a method to send a data stream through USB; only to capture receiving it using input(). (someone please correct me if i'm wrong on this.) the only real option is to use an external UART-to-USB converter, and use busio.UART. there is also USB HID support, but that would most likely be quite limiting since you'd have to convert data to keycodes/etc and parse it on the PC side.
Arduino may have better options, with the use of Serial \ Serial1. i haven't really used Arduino in quite some time, so i can't help at all on that front.
i was hoping since it had the HID capability i could pretend to be some other USB device
modem ? or perhaps audio or so on
to the stream the data that way
long as i can open the raw stream PC side before a decode
well, there is HID Consumer Control. but, if you were planning that, then i guess you already thought about intercepting and parsing on the PC side.
i should then be able to implement a custom decoder to pull out my data
Humble has a new python bundle out.. I posted the link in books
HID doesn't seem the right overall choice though since it's ISR driven handling in the OS with limited to 0 buffering
there is already uart over the usb but i'd need it to run @ 1 Mb/s ish and i don't know if it will let me
yeah, i agree. iirc there is an open issue for (re)implementing multi-terminal, but not completely sure that would allow this. and, i'm fairly certain there hasn't been any movement on it.
best idea was to present as an microphone
and then open that
and then take the bytestream and re-interpret
BUT i'd have to know how to present as a microphone vs HID
@tulip sleet did most (all?) of the HID work. he would know best if that can be extended.
ok
technically it's 5 microphones but i can interlace them in one stream so no big deal
TY though 😃
does anyone know a board house that will also populate boards ?
it's called pcba or pcb assembly. SeeedStudio is one.
pcba is rather expensive though
PCBWay is another popular one.
microfab
https://pcbshopper.com/ <-- click the "assembly" tab
PCBShopper is a price comparison site for printed circuit boards. Enter your PCB's specs and immediately see prices from more than 20 PCB manufacturers.
there are many more, for example elecrow is not listed there, that's where I assemble mine
thanks !
Happy New year everyone! I was wondering if there was anHTTP client library in circuitpython (Need to make a simple POST to a webservice)?
HAPPY NEW YEAR, Hope everyone has prosperous 2019 to come.👌
Charles
@inland tusk you too!!
@pliant pond no httpclient yet, it's still early but you can connect to the internet using this guide https://learn.adafruit.com/adding-a-wifi-co-processor-to-circuitpython-esp8266-esp32
Surf the 'net with Blinka!
Thanks for answering! I was just hoping for some of the encoding to be offloaded to smarter brains than mine 😄
@prime flower Brent hope you have one too
@tulip sleet @tidal kiln I have an update - basically two things have to be true to get input() to return and provide data (at least when the client's linux). 1) You must send a carriage return (\r) - Minicom does this and echo does not. and 2) you must read from the socket (from the linux side).
So, the following works:
$ printf "red\r" > /dev/ttyACM0
$ cat /dev/ttyACM0
The only problem I've found is that cat never returns (neither does tail which I found surprising). I also learned that there's basically no way to make echo send a \r consistently, but the bash builtin printf does fine.
This command works exactly as I'd like :
printf "@wheel\r" > /dev/ttyACM0 ; head -1 /dev/ttyACM0 > /dev/null
Still would love to know why I have to read the stream to get it to act, but I'm not complaining - I have a solution 😃
How does one "step over" a line in gdb? ie go to the next line, not jump into the function call
thanks
Or launch it from emacs & you'll get a menu & lots of goodies (my first IDE was Emacs + GDB)
@tough flax Anything with text I usually use GNU Emacs.
is the CPX sound sensor SPW2430?
@tulip sleet , @umbral dagger , thanks for you hints, I got it working now.
ha, oops, just called a file neostar.py and another dotpixel.py
@ruby atlas better than neodot.py and pixelstar.py, right?
took me bit but added sound sensor to cpx frozen lib
just does dB
cpx.magnitude
everything was from here https://learn.adafruit.com/sensor-plotting-with-mu-and-circuitpython/sound

Plot all the things!
hmm i guess it isnt dB at least it's no where near the same as my multimeter, but does reflect how loud sound is
@terse bay moving over from #help-with-projects, what OS are you on and which version of CircuitPython are you running?
Alrighty, this looks like the proper forum for my question:
I am fairly versed in MATLAB and ARDUINO coding, but have taken on the side project of learning CIRCUITPYTHON by building a neotrellis toy. I have a Feather M0 Exprtess built and functioning and am currently working on the code for a Simon-like sequential memory game. I am building it off of the simple Neotrellis Example file. My question is this: How do I edit and save .mpy files? I am using MU as my editor and it doesn't seem compatable. Ive searched quite a bit to no avail. THANKS!!!!!
im on windows 10, CP version 3.x.x
im at the gym on the treadmill lol, if you need the actual version I can post in a bit when I gewt home
@terse bay as far as I have understood this, you cannot edit the *.mpy files
Actually, let me back up a minute.
How do i edit and save .mpy files?
.mpy files cannot be edited. they are .py files that have been converted to bytecode, using the mpy-cross utility. so, you'll have to edit any .py files, then run mpy-cross to convert them. here is a link to download mpy-cross 3.x for windows: https://github.com/adafruit/circuitpython/releases/download/3.1.1/mpy-cross-3.x-windows.exe
you have to edit *.py files and use a "cross-compiler", to "compile" *.mpy out of them
@terse bay are you trying to edit a library/etc that was downloaded, or your own local files?
oh ok, that's silly, but I think I understand. So in order to get into Imported files from an example code, and tinker with them ( that seems to be how I learn best what things do), I need to pull it off the GitHub, save it as a .py file and put that in the lib folder on board, then I can edit it? must I also delete the original .mpy that im tinkering with?
can I import .py files exactly the same way as I have been with .mpy files?
@terse bay you can download the .py bundle, as opposed to one-at-a-time.
and yes, .py imports the same. however, memory issues can arise depending on the size of the file. CircuitPython does the bytecode conversion of .py files internally, but that takes up additional RAM space. that is why using .mpy is recommended (required in some cases).
@raven canopy https://cdn.discordapp.com/attachments/327298996332658690/529493911924768778/express.py is line 109 needed?
the actual property is down at line 506
or maybe @idle owl could help
@raven canopy Ya i have the current pi bundle for version 3.x.x . and sounds good, thanks. I suppose I will go ahead and learn how to use mpy cross, I guess it will be handy eventually .
@upbeat plover its possible that the instance variable could be removed, and have the property just return the math.sqrt result. i don't see anywhere else that the instance variable is used...
thank you, removing it should free up a tiny bit of ram?
tiny...yes. wouldn't expect much savings, if its even noticeable. 😉
@property
def magnitude(self):
samples = array.array('H', [0] * 160)
self._sound.record(samples, len(samples))
minbuf = int(sum(samples) / len(samples))
sum_of_samples = sum(float(sample - minbuf) * (sample - minbuf)
for sample in samples)
return math.sqrt(sum_of_samples / len(samples))
does that look correct?
yep
after loading adafruit_circuitplayground.express has like 22kbs of ram
well, on the CPX that library is frozen in. are you updating the frozen lib? that may complicate your comparisons, if not.
yeah also i have to load gc so not just express is being loaded
this was my memory test
`>>> import gc
gc.mem_free()
22256
gc.collect()
gc.mem_free()
22208
gc.collect()
gc.mem_free()
22176
gc.collect()
gc.mem_free()
22144
from adafruit_circuitplayground.express import cpx
gc.mem_free()
11408
gc.collect()
gc.mem_free()
11504
cpx.magnitude
48.4383
gc.mem_free()
10144
cpx.magnitude
131.216
gc.mem_free()
8784
cpx.magnitude
75.0965
gc.mem_free()
7424
cpx.magnitude
60.0724
gc.mem_free()
6064
cpx.magnitude
58.9491
gc.mem_free()
4704
cpx.magnitude
48.5408
gc.mem_free()
3344
cpx.magnitude
53.6286
gc.mem_free()
1984
cpx.magnitude
63.8343
gc.mem_free()
11616`
looks like gc.collect() is not needed and i only have 11kbs not 22kbs
the garbage collection will eventually toss out stuff; gc.collect() just forces it.
so i do need to import it to do the auto collect?
nope. well, there are instances in code where forcing it is useful.
smaller samples seem better when trying to use as "the clapper"
I'm not sure how to do github but I think this needs to be verified. https://github.com/adafruit/Adafruit_CircuitPython_CircuitPlayground/commit/c377b39ba584cf03d734f228ec7a3855f5fb12eb

do i click the "Create pull request" button?
im gana click it
Yes, that puts it in for approval
is it possible/okay to change the usb label name of a circuitpython cpx so that it works with devices that only work with certain labels on a usb device?
maybe this? im not sure never tried
GitHub
CircuitPython - a Python implementation for teaching coding with microcontrollers - adafruit/circuitpython
@acoustic pollen like “CIRCUITPY” to something else?
if the volume name, yes, it's in filesystem.c line 66 https://github.com/adafruit/circuitpython/blob/master/supervisor/shared/filesystem.c#L66
GitHub
CircuitPython - a Python implementation for teaching coding with microcontrollers - adafruit/circuitpython
thats probably what he means
ywah
*yeah
is it possible to do it from windows itself when it's plugged in or does it need to be special built?
special build.
@ruby atlas @acoustic pollen Idk if this is a bug, but I just tried renaming "CIRCUITPY" to "CIRCUITPY2" in Windows 10 and Mojave with no issues
(on 4 alpha 5)
May be fine, but I bet it returns as CIRCUITPY if you reconnect.
not true, it retains the new name
does it have new name on other devices?
Let me pull out my laptop
only tested on windows and mac
yep retained on mac between systems
maybe a perk of Tinyusb ? hm
there's undoubtedly code someplace to save that to flash
thats cool
/dance
does it work if you then take that to another computer?
Yep
I moved it to my other mac.
Now I know which one is my Feather M4 and which is the Metro M4
@meager fog @ruby atlas only discovered this by mistake 😄
it didnt used to work
STATIC mp_obj_t vfs_fat_setlabel(mp_obj_t self_in, mp_obj_t label_in) { ... well that'll help 😃
this apparently works now - and quite well! handy when you have many circuit py boards :) find a good spot in the essentials? maybe early on cause its useful for classrooms!
Should failing to upload artifacts cause a PR to fail Travis?
(IMO it shouldn't be trying)
Happy New Year! Still working with I2C registers. Trying to modify MCP9808 code from https://learn.adafruit.com/circuitpython-basics-i2c-and-spi/i2c-devices
Trying to change the resolution by setting register address 0x08 to value 0x0. The code I am using is below. The three commented lines in the while loop was my latest attempt.
import board
import busio
import time
i2c = busio.I2C(board.SCL,board.SDA)
def temp_c(data):
value = data[0] << 8 | data[1]
temp = (value & 0xFFF) / 16.0
if value & 0x1000:
temp -= 256.0
return temp
while not i2c.try_lock():
pass
while True:
i2c.writeto(0x18, bytes([0x08]), stop=False)
resolution = 0x0
i2c.writeto(0x18,resolution,stop=False)
i2c.writeto(0x18, bytes([0x05]), stop=False)
result = bytearray(2)
i2c.readfrom_into(0x18, result)
tempC = temp_c(result)
tempF = tempC * 9 / 5 + 32
print('Temperature: {} C {} F '.format(tempC, tempF))
time.sleep(1)

Learn how to talk to I2C and SPI devices with CircuitPython!
hm @hearty edge if you wrap your code in ``` it'll format it to code for easier viewing
@tawny creek thanks for the tip!
import board
import busio
import time
i2c = busio.I2C(board.SCL,board.SDA)
def temp_c(data):
value = data[0] << 8 | data[1]
temp = (value & 0xFFF) / 16.0
if value & 0x1000:
temp -= 256.0
return temp
while not i2c.try_lock():
pass
while True:
i2c.writeto(0x18, bytes([0x08]), stop=False)
resolution = 0x0
# i2c.writeto(0x18,resolution,stop=False)
i2c.writeto(0x18, bytes([0x05]), stop=False)
result = bytearray(2)
i2c.readfrom_into(0x18, result)
tempC = temp_c(result)
tempF = tempC * 9 / 5 + 32
print('Temperature: {} C {} F '.format(tempC, tempF))
time.sleep(1)
@ruby atlas that build is failing on the Building Translations. need to run a make translate then commit that. i'm peaking at the reason for artifacts; there's no cron but i imagine its for the nightly S3 build.
aha! i missed that failure.
This has the comments in the correct locations
import board
import busio
import time
i2c = busio.I2C(board.SCL,board.SDA)
def temp_c(data):
value = data[0] << 8 | data[1]
temp = (value & 0xFFF) / 16.0
if value & 0x1000:
temp -= 256.0
return temp
while not i2c.try_lock():
pass
while True:
# i2c.writeto(0x18, bytes([0x08]), stop=False)
# resolution = 0x0
# i2c.writeto(0x18,resolution,stop=False)
i2c.writeto(0x18, bytes([0x05]), stop=False)
result = bytearray(2)
i2c.readfrom_into(0x18, result)
tempC = temp_c(result)
tempF = tempC * 9 / 5 + 32
print('Temperature: {} C {} F '.format(tempC, tempF))
time.sleep(1)
And yeah, i'm sure it's the nightly S3 stuff, but that was just misleading I think.
im missing the adafruit_circuitplayground.express library. where would i re-get it

How to build CircuitPython yourself on different platforms
i don't see anything related to re-downloading the lib in there
git pull
git submodule sync
git submodule update --init --recursive
# Then make again.
for updating but i usually just delete the whole circuitpython and git clone
if i have changes i keep them backed up somewhere else
is there a way to re-install the library just with a folder or is it unique to every cpx board?
if your trying to change frozen lib adafruit_circuitplayground.express library you have to rebuild and then use new uf2 file
im not sure how its "missing"
@acoustic pollen the library is "frozen into" the CPX firmware. if importing it is failing, then the file system may be corrupt.
@upbeat plover I replied to your PR on GitHub. Unfortunately we won't be able to add the feature to the library. It's already almost too big. The buffer required to do sound sensing causes memory allocation failures consistently as soon as any other code is added to a program. It runs fine alone, but if you add any other features to your program, it begins to fail.
We tried before, I have the code already written to add it. 😃 But until there's an update to how memory is handled or physically to the CPX, it isn't viable.
for some reason the keyboard feature isnt working on circuitpython on the cpx
from the make it a keyboard guide
@idle owl can i get an example of a failer? cause im not seeing any issues yet and only diffrence is 176 bytes when importing cpx
I believe you i just would like to understand it.
@upbeat plover I can in a bit. It was failing when you started to add other things like NeoPixel or light sensor or some other feature of the lib. Like, if loud_sound() (which was simply a threshold check), turn on NeoPixels or something like that.
Why are the A0 and A1 pins on the Feather M4 marked with brackets on the PCB? Can I use them like regular digital pins?
NEW YEAR'S DAY 2019 - GitHub stars live @adafruit @github #adafruit #github #circuitpython-dev https://youtu.be/ZLSLhEF9ShI & https://github.com/adafruit/circuitpython

GitHub
CircuitPython - a Python implementation for teaching coding with microcontrollers - adafruit/circuitpython
I think it's because they offer DAC functionality. I believe you can still use them as digital IO pins.
GitHub
CircuitPython - a Python implementation for teaching coding with microcontrollers - adafruit/circuitpython
Message:
You are running in safe mode which means something unanticipated happened.
Looks like our core CircuitPython code crashed hard. Whoops!
Please file an issue at https://github.com/adafruit/circuitpython/issues
with the contents of your CIRCUITPY drive and this message:
Crash into the HardFault_Handler.
@idle owl i found a crash when doing
from adafruit_circuitplayground.express import cpx
while True:
if cpx.magnitude > 400:
cpx.play_file("electrons.wav")
that crashs circuitpython and causes safe mode, even if you have a sleep at the end of file play but
from adafruit_circuitplayground.express import cpx
cpx.play_file("electrons.wav")
cpx.magnitude
cpx.play_file("electrons.wav")
cpx.magnitude
runs without crashing
everything else seems to work in the cpx lib
from adafruit_circuitplayground.express import cpx
import gc
while True:
gc.collect()
if cpx.magnitude > 400:
cpx.play_file("electrons.wav")
no crash so everything does work fine
@raven canopy this is where the gc.collect() was useful
from adafruit_circuitplayground.express import cpx
import gc
cpx.pixels.brightness = 0.3
while True:
gc.collect()
if cpx.magnitude > 400:
x, y, z = cpx.acceleration
print(x, y, z)
cpx.red_led = True
print(cpx.touch_A1)
print(cpx.touch_A2)
print(cpx.touch_A3)
print(cpx.touch_A4)
print(cpx.touch_A5)
print(cpx.touch_A6)
print(cpx.touch_A7)
print(cpx.button_a)
print(cpx.button_b)
cpx.pixels[9] = (30, 0, 0)
cpx.pixels[8] = (30, 0, 0)
cpx.pixels[7] = (30, 0, 0)
cpx.pixels[6] = (30, 0, 0)
cpx.pixels[5] = (30, 0, 0)
cpx.pixels[4] = (30, 0, 0)
cpx.pixels[3] = (30, 0, 0)
cpx.pixels[2] = (30, 0, 0)
cpx.pixels[1] = (30, 0, 0)
cpx.pixels[0] = (30, 0, 0)
print("Lux:", cpx.light)
print("Slide switch:", cpx.switch)
temperature_c = cpx.temperature
temperature_f = temperature_c * 1.8 + 32
print("Temperature celsius:", temperature_c)
print("Temperature fahrenheit:", temperature_f)
print("free mem:",gc.mem_free())
gc.collect()
print("free mem:",gc.mem_free())
cpx.play_file("electrons.wav")
print("free mem:",gc.mem_free())
this works, so calling everything from a loud_sound() seems fine
added si7021 too and still has lots of memory, but i cant use touch_a4 or touch_a5 with the si7021 sensor thats unrelated to cpx.magnitude has to do with scl and sda
We can't instruct people to include garbage collection in cpx lib projects - it's meant to be simple and for beginners.
i was thinking that so im trying a build with express.py with it included lol
new org for Rust neopixels
https://github.com/smart-leds-rs
https://i.imgur.com/GHFuPLF.jpg

GitHub
WIP Organization for drivers, effects and similar stuff with smart (addressable) leds - smart-leds-rs

{kind=link}
{kind=link}
it's supposed to be a smiley face
I'm not that great at neopixel demos haha, and I'm not sure if my library is even stable enough to do anything more than that
@upbeat plover I appreciate your enthusiasm! The problem is that memory usage isn't always consistent, so even with gc.collect() included in express.py, we're still opening things up to potential failures. Like I said, the library is already massive. The amount of space left over after import is less than we'd like to have already. sound_level() requires a buffer. The difference between what I have written and what you wrote is that your buffer is half the size of mine - mine was 160 bytes which is what was used in the Sound Meter demo. It's possible that you're running into less issues than I did due to that difference.
but even losing 80 bytes to the buffer for your magnitude is not ideal.
I'm willing to test what you come up with, but I'm really not sure it's viable with the current environment.
alright, im still gana give it a shot cause CPX "the clapper" is nice
If we decide to include it, we can reopen your PR and make changes there (there are a few things that would have to change for backwards compatibility and to fit with the library design)
I agree! That's why I tried to add it. I like the idea of having as much of the functionality on the board in that library as possible.
The last two things are sound and IR. Both are massive unfortunately.
yeah IR need much bigger buf
hey, i've never actually needed to use on chip pullups but can an input be pulled up without an on board resistor?
@marble hornet yep - https://circuitpython.readthedocs.io/en/3.x/shared-bindings/digitalio/Pull.html
thnx
@idle owl i tried hard to get it to work but even after i add gc and gc.collect() to the play_file and magnitude
from adafruit_circuitplayground.express import cpx
while True:
if cpx.magnitude > 500:
cpx.play_file("electrons.wav")
still crashes
from adafruit_circuitplayground.express import gc, cpx
while True:
gc.collect()
if cpx.magnitude > 500:
cpx.play_file("electrons.wav")
doesnt crash... something weird is going on i dont understand
Thanks. Could you be more explicit? Is this on a Hallowing or some other board? Did you alter the original demo program or is it unchanged? Are you still having trouble?
>>> class A:
... def __new__(cls):
... super(A, cls).__new__(cls)
...
...
...
>>> a = A()
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "<stdin>", line 3, in __new__
AttributeError: 'super' object has no attribute '__new__'
Is this feature implemented?
Hello all, I am new to this and I am working with Itsy Bitsy controller, I just want to know up to what extent I can work with Circuit Python. Can I do a commercial project using circuit python.?
I am trying to install circuit python on my board as per the instructions on the website, green led keeps on blinking and the drive with circuit python never comes.
@regal juniper cp i believe is under the mit license so:
https://opensource.org/licenses/MIT
what exact version of the itsy bitsy do you have? (is the board black?)
I am using one with cortex m4.
Yes I tried with different cables.
okay so no drive of any kind showed up?
Nope.
Itsy bitsy drive was there but when I uploades the circuit python file everything disappeared and a green light is continously blinking on the board.
I have tried uaing different operating systems and computets but the issue persists.
which image did you flash?
can you get the boot-loader to appear again?
This one.
Yes I can get the boot-loader appear again by pressing the reset button twice.
Tried it but same issue.
Windows 7 and windows 10
Happy New Year! I can haz a BLE MESH wrapper in CircuitPython plz? https://www.nordicsemi.com/Software-and-Tools/Software/nRF5-SDK-for-Mesh
The nRF5 SDK for mesh is ideal for developing applications that use Bluetooth mesh networks . It is a richly featured SDK for building sophisticated solutions with Bluetooth mesh.
I am on windows 7 currently.
I have installed Adafruit drivers, are there some else.
okay,... it should be these:
https://learn.adafruit.com/welcome-to-circuitpython/installing-circuitpython

New to CircuitPython? This is the place to start.
GitHub
All in one Windows driver installer for Adafruit's boards. - adafruit/Adafruit_Windows_Drivers
Yes, I have installed these too.
i'm thinking...
can you try installing once more, just incase (i had to only check the top line to get them to work on win8 )
since bootloader appears, the cable is not power-only
so it's probs sw thing right? (on one side or another)
I don't get it.
becasue the bootloader shows up that means there is a data connection. that means the problem isn;t in connecting to teh board it is software problem
did cp work before the update?
(please excuse the spelling)
The thing is I have had developed a custom board with some other modules on it along with Itsy bitsy controller. While designing I followed the schematics of Itsy Bitsy controller. When the board arrived, I burned the bootloader using Jlink and now trying to install cp but coming up with the issue.
Cp never worked.
so it isn't a from adafruit board? but the same pinout ?
is there a flash chip on the board?
is there a GD25Q16C on the board?
and i'm just curious are those 0402?? really cool!
yes these are 0402, I doubt the existance of GD25Q16C
ah okay, so the itsy m4 board has that built in. it is where the files are stored
@stuck elbow is there enough space for an m4 with internal flash as the drive?
3.87 MB
where do you see that?
The drive with label ITSYM4Boot.
i see that on my m4 board too, but that doesn;t necessarily mean that there is 3.xx mb of flash
i think, if you don'y have external flash connected to the atsam51, you will need to make a custom board file for your device which uses the internal flash as the drive
The reason I am trying for cp is that I want to configure sercomm ports as serial ports. Is there any way around? Can I do it using Arduino IDE?
i don;t have the expertise but plenty of the cp helpers can help with the board configuration. (it isn't too complicated) i've done it, just not enough to show someone how
and i'd ask in #help-with-projects about that in arduino
are you familiar with github?
It is for the Hallowing.
Running the latest version of the 4.00 Alpha
I attached a Bluefruit LE UART Friend [2479] to the pins on the back to try working with bluetooth.
I'm working on a custom program from that has the intention of running a neopixel strip in a pattern that can be changed by an app on my phone via the bluetooth.
The zip file in the original contains the code file which caused the error.
The board runs a simple program so tonight I'm going to try rebuilding the progra...
i do know it isn't that difficult you just need to know what to do, i suggest askig someone with more experience then i.
Yes I am.
okay, so you'll need to clone the cp repo then in ./ports/atmel-samd/boards duplicate and rename the itsy m4 folder then the changes will be made in there
GitHub
CircuitPython - a Python implementation for teaching coding with microcontrollers - adafruit/circuitpython
Thank you.
@solar whale did you use a jlink to flash the particle with ?
or is there another way to get circuitpython loaded on there, like the uf2x sketch
@prime flower yes -- flash bootlader,sd then CP
jlink only for bootlader and SD -- uf2 for CP
I think you need to put our bootloader on it first -- needs J-Link
@prime flower here is what I did - using J-Link -- cloned the nrf bootlader https://github.com/adafruit/Adafruit_nRF52_Bootloader, then ```in projects/adafruit_github/Adafruit_nRF_Bootloader
make BOARD=particle_argon clean
make BOARD=particle_argon
make BOARD=particle_argon erase
make BOARD=particle_argon sd
make BOARD=particle_argon flash
copy CP .uf2 to CIRCUITPY
same for particle_xenon
@prime flower I am not familiar with what you refer to as the uf2x sketch -- I don't know if a stock particle board can be uploaded to by arduino or not -- iI have not tried that.
was referring to https://github.com/adafruit/uf2-samdx1, but I'm following along with the nrf52 bootloader rn
@prime flower try this link https://www.nordicsemi.com/Software-and-Tools/Development-Tools/nRF5-Command-Line-Tools
The nRF5 Command Line Tools are used for development, programming, and debugging of Nordic Semiconductor's nRF51 and nRF52 Series SoCs (System on Chip).
yep that works, adding to my path
__new__ requires MICROPY_CPYTHON_COMPAT which is only enabled on samd51/M4 builds (maybe on NRF but definitely not samd21/M0) due to the increased flash usage. See #1167.
@prime flower let me know if it works OK -- I have not upgraded to the latest nrfprog so will wait until you confirm before I do 😉
@dhalbert @tannewt if either of ya can verify this (i believe its true) then @kattni please add to the Expectations page :)
@prime flower Nice! I don't think Mu is particle aware yet --- not sure how to get it there...
fairly quick flash -> install, but I had the arm toolchain already installed
yeah -- it was quick and easy for me.
Download the ESP32 firmware bundle above, unzip and place the esp folder in the root directory of your CIRCUITPY drive alongside adafruit_miniesptool.py
@solar whale do you mean, keep miniesptool in CIRCUITPY instead of lib/
oh you didnt write that part, whoops
oops -- missed that -- if you have miniesptool in the lib, then no need to copy it over again
ESP32 mini prog
Resetting
Traceback (most recent call last):
File "code.py", line 25, in <module>
File "/lib/adafruit_miniesptool.py", line 448, in sync
RuntimeError: Couldn't sync to ESP```the guide still needs some clean-up