#linear-algebra
2 messages · Page 321 of 1
Ah. No not really. Might get something for method at least.
Alala cliqpedia
J'aime pas trop son contenu perso, il explique pas de manière ouf et il fait des slides blindées : la combinaison des deux je trouve que ça embrouille à fond
Mais bon l'idée c'est que I_(L) c'est un vecteur qui représente la direction dans laquelle tu prends ta dérivée directionnelle
Le problème c'est que t'as plein de vecteurs qui représentent une même direction (si je me prends un vecteur x, kx pour n'importe quel k !=0 représente la même direction que x)
Pour se fixer les idées, par convention on prend I_(L) unitaire (I.e. de longueur 1)
Un vecteur de longueur 1 c'est un truc qui tape dans le cercle unité
C'est pour ça que tu peux écrire I_(L) comme cos(a) Ix + sin(a) Iy pour un certain a
@hard verge

(aussi ça aurait été mieux de mettre ton message dans #multivariable-calculus mais bon c'est pas un problème)
I recognized the guy in the video, that's why I answered in French lol
ah d'accord oui c'etais cette partie ou je comprenais pas pq le vecteur 1L devait être unitaire
Mais ouais sinon je te conseille les vidéos de Prof Leonard sur le sujet elles sont vraiment top (la playlist calculus 3, il a une vidéo sur les dérivées directionnelles)
oui ahah
ah ok moi jtrouve ca va
okay je testerai, en anglais ca va etre un peu cho mais ca sera l occasion de progresser
c'est des vidéos assez longues (littéralement ses cours de fac enregistrés globalement) mais tu peux speedup un poil et je trouve qu'il se démerde bien mieux sur ce terrain
good luck
C'est un mélange de cours et de séance d'exos c'est plutôt cool comme format
Guys, if I have a polynomial, say P(f)= f + f^2, where f is a linear transformation V->V
I'm not getting how to find P(P(f))
Please help 😢
if you mean to say P is the polynomial P(x) = x + x^2, then P(P(f)) = P(f) + (P(f))^2 = ... (you can finish it from here)
polynomials aren't defined in terms of how they act on linear transformations, they're defined as sums a_0 + a_1 x + ... + a_n x^n
over what ring
Anyone on?
@amber crow no, this server has been abandoned for years if not decades. (/sarcasm)
if you have a linalg question to ask then just ask it
Determine the value of A and B if the solution of this linear system is (4,6). Ax + By =-20. Bx + Ay = 15
dis confsing me
this doesnt feel like #linear-algebra , but i'll give some guidance anyway
the solution being (4, 6) means that the system is solved when (x, y) = (4, 6)
i.e. when x = 4, y = 6
so substituting this in, we have that A * 4 + B * 6 = -20, B * 4 + A * 6 = 15
solve.
well it is vaguely linear-algebraic in that it deals with a linear system
so there's that
its linear equations
srry bbg
exam is over so idk if you care anymore but no, when looking at it as a Z Module which we always did
its cyclic but the generator is never linearly independent
🥲
all in all i have a good feeling i think
yeah everyone i knew just took random numbers
so did i


So, T is invertible, then we can use Cayley-Hamilton Theorem to get a polynomial p(x) in F[x] such that p(A) = 0, which indeed has a non-zero constant term.
Question: How can I prove that this polynomial is indeed the minimal polynomial? I know that the minimal divides any polynomial that has A as a root
Another way to think of: How do I know if the polynomial given by the Cayley Hamilton is minimal?
If it is
Cayley Hamilton just says that p(A) (where p(x) is the char polynomial of A) is 0
I'm not sure if this answers your question but the minimal polynomial is the generator of the Ideal in K[X] that is the kernel of the map that plugs in your f into a polynomial
since every kernel of a ring homomorphism is an ideal in the domain
so to generate these ideals the degree has to be minimal
That was to much, I think?
This was how my course introduced the minimal polynomial
if you're not familiar with some of these terms just ignore what i typed
You can show this because T is invertible if and only if its representation matrix is invertible, and a matrix is invertible if and only if its determinant is non-zero, and since the constant term in the characteristic polynomial is (-1)^n det(A)*I, this is iff the constant term in the characteristic polynomial is non-zero.
And you know the minimal polynomial divides the the characteristic polynomial…
And you can then manipulate p(T) to get some polynomial = I, and that polynomial will have a zero constant term, so you can simplify it to T(…)=I
I am acquainted but not familiar
hummm
but what about having T(...) = I? I did that part but the minimal polynomial should have 0 as it image
I don’t understand your question
How does getting T(...) = I helps
You have Tq(T)=I (and also q(T)T=I) so you have that q(T) is the inverse of T (q(T) is that …)
q(T) is indeed a polynomial
I got $\frac{1}{det(A)(-1)^{-(n+1)}}T(T^{n-1}+T^{n-2}c_{n-1}+\dots+c_1) = I$
It doesn’t really matter what the polynomial is, as long as it exists
mns

I am sorry but I don't see how this answer the question
Because T*q(T)=I and q(T)*T=I. What’s the definition of an inverse?
Where q(T)=(-1)^(n+1)/det(A) (T^(n-1)+c_(n-1)T^(n-2)+…)
Whatever you wrote up there
q(T) = T^-1
Yes
I see this answer the second question but it has two!! I want the former xd
The first paragraph here.
Also showing that q(T)=T^-1 is sufficient anyway
You don’t even need the first paragraph I sent
You can totally ignore it actually
As you said, Cayley-Hamilton provides us the char polynomial which indeed has a non-zero constant term. How do we go from here to the minimal polynomial?
You don’t need Cayley Hamilton
I'm looking through a solution to a particular problem here
https://math.stackexchange.com/a/1939462
And I'm trying to code an answer to this problem, but I've noticed in one of my test cases I am given a U of 0,0,0 which is the zero vector?
Part of my code indiscriminately converts this zero vector to a "unit vector" by which it tries to take 0,0,0/sqrt(0*0 + 0*0 + 0*0)
which then comes back as NaN basically...
And I'm really not sure how to deal with this...
In my specific test case, I'm basically positioned at 3,2,1 a laser is fired with vector 0,0,0 and the position of what I'm trying to hit is an object at 3,2,1 with a radius of 0.
Basically I am directly on top of an object with a radius of zero firing with a vector of 0,0,0 and I'm not hitting that object currently.
The test case seems to think I should be hitting this object... and mathematically I want to know why
More specifically I'm kind of interested in, what exactly is the zero vector? Does it have a magnitude? And mathematically how should this situation be playing out or what does it all actually mean?
You have this, just instead of dividing by the determinant times (-1)^n, you’re dividing by the constant term of the minimal polynomial
Basically you have a minimal polynomial
[ m_T(x) = x^n + c_{n-1}x^{n-1} + \cdots + c_0 ]
You know that $m_T(T)=0$ so
[ T^n + c_{n-1}T^{n-1} + \cdots + c_1 T = -c_0 I ]
Then you get that
[ T\parens{-\frac1{c_0}\parens{T^{n-1} + c_{n-1} T^{n-2} + \cdots + c_1}} = I ]
So if you define the polynomial
[ p(x) = -\frac1{c_0}\parens{x^{n-1} + c_{n-1}x^{n-2}+\cdots+c_1} ]
You have that $T\cdot p(T)=I$ and $p(T)\cdot T=I$, so $p(T)=T^{-1}$

So you have shown that T has an inverse and it is a polynomial
You’ve answered both questions at once
oh

Now I see how it relates with the minimal polynomial!!
I was completely not using its definition
Thank you very much for your time!

"Let V be a finite-dimensional vector space over a field F and Ω an algebraically closed field containing F ."
So, for any polynomial p(x) in Ω, there's alpha in Ω such that p(alpha) = 0. I wonder what Ω containing F ( F subset Ω ) tell us

Every field has a field extension which is algebraically closed, so unless you have a specific question not much I’d think
well it's just convenient to be able to work over a field where every polynomial has a zero
it should hopefully at some point become clear why your text does this
hum ok thanks
just to make sure, T = [0 & 1 // -1 & 0] is semisimple. As F = R and Ω = C so that m_T(x) = (x - i)(x + i)
for context: T is semisimple if mT(x) is a product of distinct linear factors over Ω[x];
F or sigma?
over F
algebraically closed fields are good for the soul
this definition also works
the set of all polynomials of degree 3
does this include something crazy like x^8 - 3x^3, because technically this polynomial has a third degree term
no, x^8 - 3x^3 is a polynomial of degree 8, not 3.
the degree of a polynomial is the highest degree of all its terms.
guys, if If A is m×n matrix and n>m
how can i prove that A^T*A is a singular matrix.
i proved that A is a singular matrix
because its rref cannot be an Identity(equivalence thrm)
but how to prove the A transpose times A
$A$ is not singular, it needs to be square for it possibly be singular (and have $\det(A)=0$). Look at the rank of $A$ and $A^TA$
Sven-Erik

,w Bunny is considering joining a tennis club. The downtown club charges a $200 membership fee and $25 per hour to play. The uptown club charges a $300 membership fee and $20 per hour to play
Wolfram Alpha doesn't understand your query!
Perhaps try rephrasing your question?
Click here to refine your query online
hey, quick and stupid question:
Determine the dimension of the subspace $W \subseteq V = \bR^{4}$, $W = {(a, b, c, d): d = 0}$
texaspb :rainbow:

the answer for this is dimW=3, I don't get why
a vector from my subspace W has 4 components
why is the dim not 4?
I mean intuitively it's clear that it's because of my 4th component being 0, but why does this imply that the dimension is 3
in this case
find a basis of W
ok
so
hm
ok I got it
you cant find a basis of 4 vectors of 4 components right
is that what youre trying to say
im just saying to find a basis
ok my first attempt would be to try this "base" B={(1,0,0,0), (0,1,0,0), (0,0,1,0), (0,0,0,1)}
which doesnt work for W
ofc this requires knowing what a basis is
yeah
I tried using the standard basis for R^4 but it cant span W
so that was my first guess
ok I dont get what you're trying to say
I know what a basis is
I know what a basis is
B={(1,0,0,0), (0,1,0,0), (0,0,1,0), (0,0,0,1)}
here, spanB doesnt equal W
i suggest a more systematic way of finding a basis instead of guessing
write an arbitrary vector in W as a linear combo of some independent vectors
those independent vectors form a basis, dimW is its size
hey friends, im having trouble grokking this paragraph in my book that comes after a proof. the statement being proven is that if you have a vector space V with basis B, then given any vector space W and any function from B to W, you can extend that function to a linear transformation from V to W

g bar is the linear transformation from V to W and g is the function from B to W
what im confused about is that after the proof he says that being able to extend g to a linear transformation depends on the fact that the basis vectors are linearly independent, and then he gives an example saying that a function g from the set {v, -v} to W can't be extended unless g(-v) = -g(v)
im just confused as to why we can't always turn g into a linear transformation when it's defined on linearly dependent elements
like in the example, i don't get why having g(-v) = -g(v) is required
Well if g is linear then g(cv)=cg(v) for all scalars c. Using c=-1 we get g(-v)=-g(v)
So this absolutely has to hold, otherwise g cannot be linear
Hi I need help with this
Could anyone please help me understand why
w_0 + 4w_1 - 2w_2 = 0
turns into
w_0 + 4w_1 = 0
and w_0 - 2w_2 = 0
context?
So I have a linear graph of the equation
w0 + w1x + w2y = 0
i have values for x and y
and am to solve for w0 w1 and w2
I want to know what math rule is used to make
w_0 + 4w_1 - 2w_2 = 0
into
w_0 + 4w_1 = 0
and w_0 - 2w_2 = 0
do I need to give more context



u forgot to mention this https://i.gyazo.com/5f7c4ac55b87832296890a4712e54bc3.png

these are assumptions on specific points on the line, not implied by the equation itself
take the point (4,0), ie the equation holds for x=4, y=0
assumption in that its an extra bit of info given by the problem
one known point on the line is (4,0), ie the equation holds for x=4, y=0
out of interest this is the solution im showing you, I just havent a clue how we get there
so we can plug x=4, y=0 into the equation
no, we plug x=4, y=0
stop
hold up
that would mean
that there are 2 insertions
x = 4, y = 0
and x = 0, y = -2
we're just focusing on the fact (4,0) is a point on the line for now
we focus on the other point later
you just helped me understand that the points are treated seperatly
thats why we get
w_0 + 4w_1 = 0
and w_0 - 2w_2 = 0
Thank you 😭
But ok yeah lets continue with the one point
one known point on the line is (4,0), ie the equation holds for x=4, y=0
so we can plug x=4, y=0 into the equation
we get w0+4w1=0
is this clear?
so far yes because (0)w2 is 0
now (0,-2) is another point on the line, ie the equation holds for x=0, y=-2, so lets plug those in
yes
thats how we use two known points on the line to get these two equations from the original
no prob
whats the square root of an operator? our instructor never defined it for us but apparently we need to know what it is to solve a homework problem
the square root of an operator T is an operator S with S^2 = T
what else could it possibly be?
@real bone
ok thats what i assumed thx
i just wanted to make sure just in case i was wrong about it
I have a collision checking algorithm where I take a start point, a firing vector, and then I have a sphere at a location with a radius.
https://math.stackexchange.com/a/1939462
I'm working off of the example posted here...
In my current particular test case my
C = <-2,0,0>
r = 1
P = <0,0,0>
U = <1,0,0>
The math works out as follows
Q = <0, 0, 0> - <-2, 0, 0> = <2, 0, 0>
a = <1, 0, 0> * <1, 0, 0> = 1*1 + 0*0 + 0*0 = 1
b = 2 * <1, 0, 0> * Q = <2, 0, 0> * <2, 0, 0> = 2*2 + 0*0 + 0*0 = 4
c = <2,0,0>*<2,0,0> - 1*1 = 2*2+0*0+0*0 - 1 = 4 - 1 = 3
d = 4*4 - 4 * 1 * 3 = 16 - 12 = 4 > 0
Where d is the discriminant of my quadratic. I've noticed that in this particular case d is 4 which is greater than zero, and I'm trying to figure out why and I realise like.... indeed my sphere is on this line... but it's behind my starting point.... I'm basically collision checking a line not a ray, and in this particular collision I have hit an object behind me...
Is there any way to actually check for and rule out this case?
I'm currently kind of thinking maybe if I can get a unit vector from my start to my sphere location, and if it's opposite my given firing vector I know that I can't hit that object? Is there a fancy linear algebra way to do that?

Mathematics Stack Exchange
I have a 3D world and I have a gun who's position is defined by X,Y,Z which fires a bullet in a straight line with a direction defined by X, Y, Z towards a target who position is defined by X,Y,Z w...
can i get some help with this?

I'm currently kind of thinking maybe if I can get a unit vector from my start to my sphere location, and if it's opposite my given firing vector I know that I can't hit that object? Is there a fancy linear algebra way to do that?
It seems weird to me that this is necessary... when I feel like I'm already doing so much with these vectors... How can I already tell if my object lies on my line without knowing somewhere already that it lies on my line "backwards"
Try #precalculus or #prealg-and-algebra
Sorry it’s a bit unclear, are you trying to determine if your line hits a sphere?
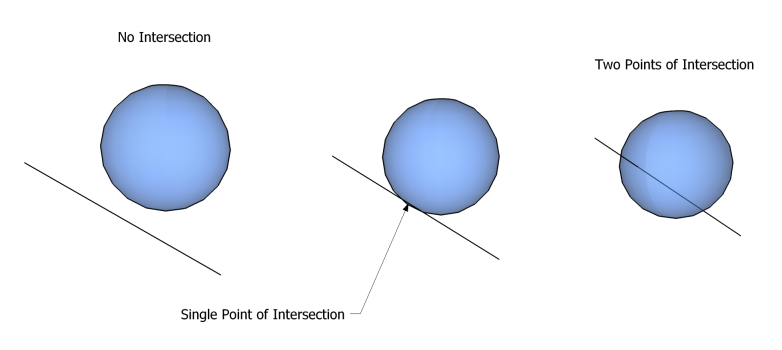
Let p(t) = p_0 + td be a your line. If your sphere is determined by a center c and radius r we have all points x of the sphere satisfies |x-c| = r. Now plug in x = p(t). Square both side, left side turns into a dot product, expand. Get a quadratic polynomial, if the discriminant is negative the line doesn’t intersect the sphere. If not then either the line intersects the sphere once(one solution), or twice(two solution).
If that what your trying to do.
ye they do that here https://en.wikipedia.org/wiki/Line–sphere_intersection
{kind=link}
Hi, I have a question on free variables for Ax=0 and Ax=b. In Gilbert Strang's video on Ax=b, the free variables are assigned 0, but for the null space in Ax=0, he uses free variables [0,1] and [1,0].
why is it that for Ax=b, the x particular's free variable doesn't use the same set [0,1] and [1,0]?
Hi, sorry for the interruption, but I need to show that for subspaces $V, W$ of $U$, $(V + W)/W \cong V/(V \cap W)$. I have access to the first isomorphism theorem that $V/$Ker$(T) \cong$ R$(T)$, so I could just find $T$ whose kernel and range are $V \cap W$ and $(V + W)/W$. Not sure how exactly to do that though.
PhenomPlasma

Could you try a map T:V+W -> V/VnW, where T(v+w)=v + VnW
Have to show it’s well defined first, and then then kernel is W and it’s surjective hopefully
sheeesh high level stuff
Yeah, in my case it's weird because my line isn't just a line necessarily. There's a start point and a direction vector, so there's a weird edge case where my line may pass through my sphere, but only at a point where the Sphere is behind my "start" point.
It doesn't matter, free variables are arbitrary real numbers except when you want to pick some specific solution vector