#linear-algebra
2 messages · Page 317 of 1
If you're looking at a triangle with side lengths a, b, c, the points you're looking at are the (x1,y1,x2,y2,x3,y3) that simultaneously satisfy the equations
(x1-x2)² + (y1-y2)² = a²
(x1-x3)² + (y1-y3)² = b²
(x2-x3)² + (y2-y3)² = c³
The common zeroes of a system of polynomial equations are, by definition, an "algebraic variety". Each equation generally takes one dimension away from the entire 6-dimensional space you start with.
thank you for the valuable information.
Let $v \in V$ then is v a subspace of V?
Jester

nvm its not
v is a vector in V
but then have is v + W defined
if v is a element of V
and W is a subspace of V?
i only know how to "add" two subspaces
v+W={v+w: w in W}
would this may not be a subspace cuz 0 may not be in it?
yeah in general it's just a coset
possibly
or you can call it affine subspace
This is gonna be some maniac bullshit but bear with me, I diluted it down since I last posted about it
Let M be a member of GL(n,R), essentially where F is some field, and all matricies M are full rank n x n matricies
a matrix M is crystalline if the following conditions are held
M^T * M = N, where N is in SL(n,Z), or an n x n integer full rank matrix that has determinant 1
If K is an orthogonal matrix (K^T = K^-1) then KM is also crystalline
Two matricies A and B are equivalent if: A = KBL, if K is orthogonal and L is a full rank integer matrix with determinant 1
How many equivalence classes are there for dimension n≤ 8
first try to find the equivalence class of Id
you should get KL where K is orthogonal and L is full rank integer matrix with det 1
It's actually the equivalence class of unimodular lattices
Of course, there is only 1 up to 8, and 2 at 8
but I want to prove it differently
how about you show that M can be decomposed into K*L
?
tho tbf I have no idea how to show that
also no idea why 8 matters here. so IDK
The unimodular lattices in R^8 up to isomorphism are the integer lattice Z^8 and the E^8 lattice
In geometry and mathematical group theory, a unimodular lattice is an integral lattice of determinant 1 or −1. For a lattice in n-dimensional Euclidean space, this is equivalent to requiring that the volume of any fundamental domain for the lattice be 1.
The E8 lattice and the Leech lattice are two famous examples.
Essentially this can be phrased as [using Q instead of R for simplicity]
let n ≤ 8
K_n = {M in GL(n,Q) : M^T * M in SL(n,Z)}
(K,~) :
A ~ B <=> there exists C in O(n,Q), D in SL(n,Z) : AD = CB
Prove |K_n/~| = 1 for n < 8, |K_n /~| = 2 for n = 8
... suddenly this became abstract alg, fuck
K_8/~ = {[Z^8],E^8}
I wonder if there is a linear algebraic reason for this
Are A and B also n by n matrices?

A and B generate isomorphic lattices
I am a bit confused. SL(n,F) is a normal subgroup (or kernel) of a group homomorphism det: GL(n,F) -> F^x where F^x is the multiplicative group of F excluding 0 (according to Wikipedia I read a while back)
But Z isn't a field, because it cannot form a multiplicative group 
I believe this is a general linear group over ring Z then
hm?
why would Z need to be a field
Z^x is still a group
(its just not Z\{0}, its {+-1})
Oh I see
not sure I understand but maybe it helps to look at how the inverse of a matrix is computed. It uses only addition and multiplication everywhere except in the one critical step of dividing by the determinant, so you really only need to worry about the determinant being a unit in your ring for your matrix to be invertible
afaik, if K is a commutative ring, then GL(n,K) is a monoid
The subgroup of UNITS in GL(n,K) is a group, of which is a supergroup to SL(n,K)
I don't know for sure, I just thought of it
for a monoid, the set of elements such that there exists an inverse forms a group
Well, if the monoid is cancellative

uh didn't you ask this question before lol
Hey platypus
Yeah I did
But I raised the query regarding the question to higher authorities
They said the answer is A
And didn't give any solution
How the fuck is answer A
Btw did you guys can solve a question regarding gradient
The value of gradient of z=ye^z at (0,3)
it is d
yeah how the fuck is the answer a
it is not
youve asked this so many times. this was already answered in #multivariable-calculus
it also doesnt belong in #linear-algebra
May be you can give it a shot
Bro this is india
🥲😂😂
Lmao the professors don't care
They just ignore
Some are good but I am unfortunate
i mean if you asked one of the test administrators maybe I'd understand
but your own teacher
rip
@ocean meadow pls stop asking this question. it was already answered
nah
great. also read channel descriptions to see what belongs where
??? shut up please
Chill if you can't solve move ahead
muted for 24h. pls take the time to understand the reason we have different channels

How to find a straight equation of a function that is positive in X is not equal to 4?
its a determinant which determines if functions are linearly independent
comes up a bit in ODE theory (to tell if you are spanning your solution space usually) not so much in linear algebra
its a determinant of a matrix where f(x) and g(x) are in the first row and f'(x) and g'(x) are in the second row (f's and g's in the same column)
and its used to solve problems when using the variation of parameters method in diff eqs
Can you think of different dimension vector spaces
as like
just algebra with three different variables?
And how does this change for linear systems and like, the set of all polynomials
choosing a basis of an n-dimensional vector space is the same as identifying it with R^n via some linear isomorphism
Everything is R^n if you try hard enough
how can I check how many solutions a system of equations has?
is there a general method for that
yes, it's called row-reducing the system's augmented matrix
alright thank you
i'll check that out
row reducing means that I have to put the augmented matrix in this form here, right? for example

that's row-echelon form, and if this alone is sufficient for you to tell how many solutions the system has (and so it is; it's possible to tell that ||this system has a unique solution|| from here) then no further work needs to be done
this augmented matrix seems to be missing its decorator, by the way
hmm
so my problem is that I have a system of 3 equations and only 2 unknowns
is this a special case?
I found one solution for it so far, but wanted to know if there's a general trick to tell how many solutions it can have in reality
for the system to have 3 equations and only 2 unknowns
it's usually 2 equations and 2 unknowns, 3 equations and 3 unknowns, etc right
it can be any of those.
yeah I see
Hey guys can someone help prove that this is a subspace

proving the o vector part and the addition part is fine just the multiplication with a variable
Matrix vector spaces don’t make sense to me. Like how can a 2x2 matrix be a vector space
a 2x2 matrix by itself is not a vector space
do i just say 3(αt)Yo = α3(t)Yo
@small dome yes
however the set of all 2x2 matrices obeys all the axioms you need for a vector space (you can add them and scale them and everything works how you expect it to)
thank you Ann
So because of those principle it is a vector space?
I guess another thing that doesn’t make sense is it’s dimensions? Like how can a matrix have dimensions?
one way to see the dimensions is take the matrix and "flatten it out" into a column vector, so a 2x2 matrix would be flattened into a 4x1 vector
if you like to think of dimension as the number of degrees of freedom, then every entry is another degree of freedom, so you have as many dimensions as you have entries
an m by n matrix will be of dimension mn
you can also get this by generalizing what merosity wrote
what have you tried?
can you write down a few examples of linear transformations from R to R?
for a hint: ||c = c*1 for any real number c. what does linearity imply?||
(a) Show that a vector space V is not the union of finitely many proper subspaces.
I don't understand this.
Ah
I assumed that unions and sums of subspaces were the same thing.
$(x, 0) u (0, y) $\ne$ \mathbb{R}^2$, but $(x,0) + (0, y)$ is
Color, Hermes
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

yeah sure, that works
it just means a function T: R -> R with T(x + y) = T(x) + T(y) and T(cx) = cT(x) for all c, x, y in R
that second property might be pretty helpful here...
although i suggest you figure out a few examples of such linear transformations ahead of time
might help you when you try to guess and prove your answer
reflection, rotation, scale?
translation
so 4?
those are linear transformations R^2 -> R^2 (except for the last one, translation is not)
you are being asked about linear transformations R -> R
i wrote down the definition of a linear transformation from R to R a few messages above, but i think you should tell me what a linear transformation R to R is in your own words
oh scaling
are they all given by scaling?
linear transformations aren't just scaling, reflections, and rotations, you can't apply the same geometric reasoning you would for R^2 in R
with that said, that sounds believable
if you believe linear transformations are just scaling, reflections, and rotations, then your reasoning says that these all break down into scaling (in possibly the negative direction), which would imply that all linear transformations R to R are given by scaling: for some c, the map is x -> cx
it's not quite a proof, but it's good intuitive reasoning i guess
you're gonna have to rely less on geometric intuition for this one and work with the definition i gave for this one
you need to prove that all linear transformations R -> R take a certain form, and if you don't know any, you're going to have to rely on the definition
there also seems to be a misconception that all linear transformatons are just scaling, rotating, shearing, reflecting, or something like that. this is not the case.

this is like answering "determine all linear transformations from R to R" with the phrase "the set of all linear transformations from R to R"
yeah, it's an answer, but it's not a good one
you need to be more descriptive
which is why i suggest doing the following:
-write down (explicitly; give formulae, don't just handwave it away with vague geometric intuition) some linear transformations from R to R
-try to guess what form they will all take
-try to prove your guess
and a hint for the last step is: a linear transformation T: R -> R satisfies T(x) = T(x*1) which equals what?
so T(x + y) = T(x) + T(y) and T(cx) = cT(x)
and then example of it?
idk bro im asking because i dont know the answer
those are the properties a linear transformation from R to R has
can you come up with an example of such a function?
and im telling you how you can figure out the answer
you can alternatively skip to the last step (suppose T: R -> R is a linear transformation and play around with T(x) = T(x*1) as i wrote), but i think it would be good for you to find some examples first
looks correct to me

can you start by showing that there is a vector that is not in U and not in V?
I don't understand why I would be interested in such a vector
suppose you have such a vector, call it x1, then suppose we let U1 be the subspace spanned by U and x1, and let W1 be the subspace spanned by W and x1, these new subspaces have the same dimension and that dimension is one larger than that of U and W
then repeat the procedure until you have "grown" U and W to be all of V
where each stage of growth occurs by appending a common vector to both
I'm a bit confused on adding vectors to U and W and V.
no you're not adding them to V, all vectors are already in V
I think I got confused here
Maybe you meant W?
So you would add vectors that are not in U or W but that are within the span of V until U and W's dimenions equal that of V.
Okay, but lets say we add a vector and it is already in U, but not in W. In that case C would no longer be a direct sum, no?
resulting in new subspaces with dimension increased by 1
right
you need a vector that is in neither U nor W
Lets say U = (x1, x2) W = (x3, x4) V = (x1, x2, x3, x4)
So we would construct some new vector that is neither in U or W until we reach the same dimension as V?
yep, just need to show that there always exists such a vector
Like in this case a new vector would be like x2 + 2 or something?
you could reason as follows (this can be generalized): x1 is not in W, and x3 is not in U, therefore x1 + x3 is not in U or W
I see
I think I'm still having a hard time conceptualizing vectors
Hopefully I'll get comfortable as I spend more time thinking about stuff
But yeah, that all makes sense. Thank ya kindly amigo
mucho gusto
hi friends, im learning about direct products and came across this diagram that i don't think i understand the significance of:

im not sure what's meant by "universal property," i feel like im missing something because it just seems obvious that you could make a linear transformation from U to W0 x W1 using individual linear transformations from U to W0 and to W1
so i guess im trying to understand why this is important to know
a unique linear map mind you
universal properties in general are often useful because its often better to work with that instead of the specific construction (in this case the direct product)
you can forget how the concrete object looks like and instead work with what it does (the universal property)
(this works because two objects satisfying the same universal property are unique in a very strong sense: unique up to unique isomorphism)
(in fact this is also often used to show two objects are "the same")
dunno if this is helpful but its what i have @slim gyro
you will see the usefulness once you work with them a bit more and use the to describe more complex objects, say for example tensor products
If we have 2 vectors u and v, in a vector space V, does the vector w = u + v also have to be in V?
I feel like vector spaces had a closure axiom, but I cant find it written anywhere
yea, that's a vector space axiom
what is your source then
I thought so, but why isnt it written on the wikipedia article for example
I know, terrible source for math stuff, but still

In mathematics, physics, and engineering, a vector space (also called a linear space) is a set whose elements, often called vectors, may be added together and multiplied ("scaled") by numbers called scalars. Scalars are often real numbers, but can be complex numbers or, more generally, elements of any field. The operations of vector addition an...
or just
The first operation, called vector addition or simply addition assigns to any two vectors v and w in V a third vector in V which is commonly written as v + w, and called the sum of these two vectors.
scalar multiplication is also a binary operation then, right?
not sure i get it, but are you saying that if there's a linear transformation from U to some direct product, and another from U to another direct product, there's an isomorphism between those two direct products?
idk if this helps but im also learning direct sums, it's right after this part about direct products
so im sure they're connected but i havent read far enough to see how yet
you take two different direct products that both satisfy the universal property, say $U_1$ and $U_2$ are directs products of $W_0$ and $W_1$.
then you have projections say $U_1 \to W_i$, so you can use the universal property of $U_2$ (where you set $U = U_1$ in the definition), which gives you a unique map $U_1 \to U_2$
doing the same thing with the universal property of $U_1$ gives you a unique map $U_2 \to U_1$ and playing around with those maps and the projections shows you that they must be inverses of each other
Lochverstärker

so the two objects $U_1$ and $U_2$ are isomorphic (and in fact this isomorphism is unique)
Lochverstärker

this works more or less the same way for any universal property
if your book introduces this, there is probably a more detailed proof somewhere
and yeah, many constructions satisfy some universal property and its often easier to work with that instead of the precise construction
its not that noticeable for such simple objects tbh but once you see tensorproducts, you will love universal properties
alright well i guess for now ill just remember this concept exists and appreciate it later, thank u
my suggestion would be if you are tasked to prove something about direct products or direct sums or wtv you know that satisfies a universal property, then try to do a "normal" proof but also try to only use the universal property (and not the concrete description of the object)
gotcha, ill remember that for the exercises of this section
Hiii guys


I somehow disprove the first question
What do you guys think?
I dunno what went wrong
I dunno 
But yeahhh, you will learn linear transformation soon after that
Yeahh it is linear algebra
bro how the fuck do I show if something is a vector space or not
like how to do that in practice, I have a slight idea but have no clue how to freaking ensure that my answer is correct
show the vector space axioms are satisfied
oh great but how do I do that
for example I have this here, in my head it is obviously closed under addition but not under scalar multiplication... but I have no idea on how to put that into words that will make a complete proof

you exhibit a counterexample
scan the axioms briefly, decide which one the definition of multiplication above violates
then make a counterexample
hint: || it violates the multiplicative identity ||
what if I wanted to show that the multiplication itself is not well defined? I'd have to show that the scalar multiplication isn't an element of V (R^3)?
that would be a way for the multiplication to not be well defined, here it is well defined -- the problem is that the definition doesnt turn V into a vector space
theres many ways for definitions of addition or multiplication to not be well defined
for instance if you wanted to define addition of fractions across like a/b + c/d = (a+b)/(c+d)
this would not be well defined even though the result is a fraction
since you would get different answers by taking equivalent fractions
ooooh
ok I got your example
alright, so when I perform addition or scalar multiplication, those operations are well defined as long as the result is also an element of my vector space. ie a(x, y) should entail (ax, ay) and nothing else (if V = R^2)?
and then if they're well defined I just have to check if the axioms hold
well-definedness is a very tricky business in math but i would generally say in the scope of linear algebra thats right
sure
like if I have V = R^3 again, and a vector x' = (x, y, z). then a(x, y, z) = (ax, y, z). is this a well defined operation?
it is right? because I still have a 3-tuple
yes
ok
but it doesnt make R^3 into a vector space since 0*x is not equal to (0,0,0) for all x in R^3
ofc gl

"show that there exists a basis in which the matrix of f is equal to..."
wait f ∈ lR³??
like even if f ∈M(3, lR), it's not true, for example take
$$f = \m{0 & 1 & 0 \ & 0 & 1 \ & & 0 }$$

it's supposed to be f²=0 not f³ because it's true regardless as it's 3x3 nilpotent
Impressively many typos in a short problem statement
So hmm for the proof can I just say that since square of the matrix equasl 0 then it can be in the basis
Ann

Also guys, is there a matrix that for any matrix multiply by this then it increment by some value

do you mean to ask whether there exists a matrix $A$ such that $$XA = X + \bmqty{1&1&1\1&1&1\1&1&1}$$ for all $X \in \bR^{3 \times 3}$?
Ann

Yes yes
then no
I see
X = 0
would never get sent to anything other than 0 upon multiplication by any matrix
Let's exclude 0 then 
still the map X ↦ X + [1 1 1; 1 1 1; 1 1 1] is not linear
therefore it cannot be represented in such a way
Wikipedia is in fact a good source for most math stuff I would say 
all maps of the form X ↦ XA (and generally X ↦ AXB) are linear


but it isnt
it's P(X + alpha) not P(X) + alpha
I thought it is
hey guys, is your discussion still going on? I wanted to discuss something else but don't want to interrupt
Ohh im good now, you can start
how do yall understand non-invertible matrices visually? i used to think about it in terms of span and linear combination of columns, and now determinants, but it's getting harder to visualize these intersections as matrices get more complex
Oh
Yeah so
A square n×n (let's stick to real matrices for the moment) T can be thought of as a linear map:
T : R^n -> R^n
from R^n to R^n. Right?
For example
if n=2
We could have a 2×2 matrix
that can be thought of as a rotation and scaling of the plane in some way.
And in fact
If our matrix is invertible
You can sort of think about square n×n matrices in this way
As acting on R^n via scaling, rotations, reflections and so on.
But if the matrix is non invertible
Then something else happens
what you have is that
the image of the map T : R^n -> R^n
is still a linear subspace of R^n
but now of lower dimension
So in a sense
non-invertible square matrices
can be thought of as linear maps
that collapse R^n onto a "smaller" subspace.
For instance
Think about the 2×2 matrix associated to the linear map you get when you project a vector (x,y) into (x,0) (projection into the x coordinate).
this is a 2×2 non invertible matrix
and here this idea of it collapsing R^2 into a smaller subspace is pretty clear, right?
the image of this map is precisely the x-axis.
And here's how this is related to the determinnt criterion for a square matrix to be invertible.
As you may already know
if you have a square matrix and think about it as acting on euclidean space
what the determinnt measures is the change of n dimensional volume of this linear transformation
i.e
if you look at the n-cube [0,1]^n and you look at its image under the linear map T : R^n -> R^n, what the determinant measures is precisely the generalized signed volume (so lenght for n=1, area for n=2 and volume in the usual sense for n=3) of the image of [0,1]^n under T.
So for example
if n=2
and the matrix T is invertible
then it maps the square [0,1]^2 into a parallelogram
and the determinant of T is the area of this parallelogram
now
if T is non-invertible
for example, the projection map I mentioned earlier
then it collapses the square
onto something which has 0 area
for example
a line segment
or just a point
so the determinant has to be 0
Is this clear?
yup that makes sense
thanks for such a detailed response
so I'm confused on how determinants are related to finding a solution for x = (A^-1)b, like if determinant is 0, why does that mean that there's no solution to x = (A^-1)b
I mean
the "standard" form of a linear equation is Ax = b.
You can only go from this
to x = (A^-1)b
if you know A is invertible in the first place
which may not happen
and you can measure the invertibility of a matrix via its determinant.
Another thing is
invertibility of A
implies that a solution exists and is unique
but A can be non-invertible
and the equation Ax = b still have a solution.
for some x
the thing is
a solution will exist iff b is in the range/column space of A
and
if it exists
it won't be unique anymore (if A is non-invertible)
and again
in the case where A is non invertible
if a solution exists
you will find it
but not by applying the inverse of A
because A is not invertible to begin with
np

if z = a+bi, then z is in the upper half plane iff b > 0. All you have to do is that if you take z = a+bi, then compute z+1 and -1/z, we will also have that the imaginary part of these numbers is positive.
You will have to use properties of conjugation for proving this for -1/z.
it is not necessary for z+1, as you can see.
so, am I just performing scalar multiplication of z with the matrix?
oh, so I'm plugging a + bi into (az+b)/(cz+d)
probably you should use z=x+iy to save yourself from conflating a,b with the entries in the matrix and z
right, good call.
I'm not seeing where the complex conjugate comes into play

you misunderstood the task, you didn't have to do that
that's already given from the problem
you have to show given $y>0$ with $z=x+iy$, then $\frac{-1}{z}=u+iv$ makes $v>0$
Merosity

oh...
I say try to prove it by any means possible, and then after that I can show you how to do it with the conjugate later if you're having trouble finding a way to do it that way
so, the first one is basically already proven tho right? because it's just z + 1 and that can only increase the real part?
so if z is in H, then z + 1 also in H?

does that seem right?
maybe this way to be more thorough with the top one?

Is there a way to learn how to find kernel and image in an hour
I got an exam and tryna learn it as quick as possible. I can’t find any sources online.
Unless someone could teach
Does proving that those two mentioned matricies generate SL(2,Z) require Euclid's algorithm
I'm not sure, as we haven't covered that, but I think that is why the problem states that the SL(2,Z) action is an assumption. I could be wrong tho.
yeah looks good except second one you put a sqrt in the denominator that's not supposed to be there, good otherwise I think
oh right, cause the modulus is squared, duh. Thank you for your help!
yup yw
Can anyone explain the justification for why it takes 2n^2-n arithmetic operations in the worst case when solving a linear system using LU decomposition?

Also not sure what they are defining as an arithmetic operation
Do they mean row operations?
a triangular system can be solved by means of forward or backward substitution (for lower and upper triangular systems resp)

Can someone rephrase b for me?
I'm still unclear on what the mathematical notation for b would be
Am I supposed to show that U1, ..., Uk == B1, ... , Bi?
I'm so confused
no, each U_i is the subspace spanned by B_i
example, say V = R^4, U1 = the set of vectors of the form (x,y,0,0) and U2 = the set of vectors of the form (0,0,w,z)
I think I got it now
then B1 might consist of the two vectors (1,0,0,0) and (0,1,0,0)
and B2 might consist of the two vectors (0,0,1,0) and (0,0,0,1)
the B_i are sets but they're not subspaces
Yeah, no
I just got confused because I thought that a was referring to the set of all elements in the U, which also happened to be a direct sum
I didn't realize that they were additional conditions that we needed to prove were equivalent
Feeling a bit silly 
Alright
So
For that question
I'm unsure how to get from basis to union
Like I can prove that B1, ... , Bi span U1 + ... U k, but I'm not sure how to prove that their union spans U1 + ... _ Uk from that
Basically, I'm not sure how unions (with empty intersections) relate to sums of subspaces

each u in U can be written in the form u_1 + u_2 + ... + u_k, where each u_i is in U_i
Also, can someone link me to some resource on logs/exponents or something
now express each u_i in terms of the corresponding basis B_i
Because I'm pretty sure my lack of knowledge of log/exponent rules is keeping me from completing that proof
But that would be a1b1+...+aibi
Which is not the same thing as the union of the subspaces?
That's like saying (x, 0, 0) union (0, y, 0) = (x, 0, 0 ) + ( 0, y, 0 )
well you need to use double indexing or something similar
one index for the choice of U_i, and another index for the basis representation within that subspace
well not exactly true as you wrote it there, those are individual vectors
Yeah
If we set x, y /in R
I mean, I'm just confused on how to make that transition from the sum of subspaces that span U1,...,Uk to the union of those subspaces
there's no union of subspaces involved here
the B_i's are not subspaces
each B_i is a basis (a collection of vectors whose span is the subspace U_i)
see my earlier example:

hi I'm trying to think about this section here in terms of row spaces. Since we perform row operations on the augmented matrix to get the rref form, does it mean that vector b has to lie in the row space of A as well for b to be a solution to Ax = b

no
Ax=b is consistent iff b ∈ Col(A).
in fact in your case it doesn't even make sense to ask whether b ∈ Row(A), because Row(A) is a subspace of R^4 while b lives in R^3
I see, ok thanks!
That moment when you have to compute a 5x5 characteristic polynomial in an exam situation 
yikes
Ouchies
Those painful moments when you think there must be a trick because the computation is so long but there is no trick and you wasted 10 mins
guys
to check if a set is subspace of a vector space do I just have to check for the closure axioms (closure under addition and scalar multiplication) or do I also have to check for all the other axioms
neither
you need closure and nonempty 😛
you get everything else for free then because the restriction of a commutative/associative/wtv operation is again wtv
I have no idea on how to show that it's nonempty tho lol
so the statements arent vacuous
certainly the empty set satisfies all the vector space axioms (and more!)
oh wait you said how
depends on context
are there any drastic changes when you do linear algebra over a non zero characteristic field?
like for example I have this $W = {\bold{x} = (a, b, c) \in \bR^{3}: b = c = 0 }$, if I show closure in my thought process it immediately shows that it's nonempty right? what I did was \
take any $\bold{x}, \bold{y} \in W$ with $\bold{x} = (a, b, c) \bold{y} = (a', b', c')$ then (for addition): \
$\bold{x} + \bold{y} = (a, b, c) + (a', b', c') = (a, 0, 0) + (a', 0, 0) = (a + a', 0 + 0, 0 + 0) = (a + a', 0, 0) \in W$
texaspb

for scalar multiplication it's the same process
how does this immediately show its nonempty?
because once I perform addition i will be left with an element of W?
idk honestly
it makes sense in my head
only if you start with two elements that are in W

you write down a member
every subspace must share the same zero vector from the big vector space
so that is generally easiest
oooh ok
and well, (0,0,0) is in W
gotcha
I guess this can get harder if I have a more complicated definition for a set that could be a subspace right
maybe
in situations that appear naturally its usually obvious that the set is nonempty
hmm okay
and usually the zero vector is easiest to check
(and if you can show that it isnt in your set, it cant be a sub vector space, so you are done then as well)
alright, so summarizing:
to show that a set is a subspace of a vector space:
- show closure
- show that it's nonempty
correct?
perfect, thank you so much
when your class was online and they allowed for "computational aid" 😌
certain aspects once you learn them seem really boring and tedious
Can I choose any singular vector when doing SVD?
Could you elaborate?
What do you mean by « choose a singular vector »
hello, is anyone on?
idk
do you think it is?
check it against the definition of a strictly increasing function.
you're welcome but also you are wrong
also i think we may want to take this to #calculus
g(x)=(x-1)(x-2)(x-3) for x = 2 f changes sign
If you graph this i'll see it isn't always increase but decreasing this time
you are talking about x^3 one minute and about (x-1)(x-2)(x-3) the next...
honestly i think you're rude 🙂
i am rude for responding to your question as written and not as intended when those two are different and i didn't know the latter?
🙂
is that a yes or a no?

if i get neither response i will just assume that either you're a clown or realize your accusation was baseless but now have too much hubris to retract it

what is supposed to be -1?

Sounds like they're looking for the determinant of their matrix
So, I should have been consistent and not do column and then row?
first you are exchanging cols -> (-1)* original det
Yes
btw why do you expect the det to be -1? is it the det of the original one?
I expect it to be -1 because I do a column swap.
what's the det of the starting matrix?
note on the last step you are performing 7R2-R3 -> R3 so there's a sign swap of R3
there will be another sign change at that step
do R3-7R2->R3 instead, you do not have to deal with signs again
I translated this from german, could someone give me intuition what this actually means? because of corona i couldn't listen to the past 2 lectures where we introduced this new topic. we have previously only done linear algebra.
I hope this is the right channel, as we are doing this in a Linear Algebra right now

intuitively i understand parallelism between straigt lines and planes, but this is more general
can you show the original german?

the translationsraum is a vectorspace with vectors that "move" the points
so:
$\tau_v(P)=v+P=Q$
~Martin

where P,Q are in A
v would be an element of the translationsspace
I see that in the english version of wikipedia this Translationsspace is called $\vec{A}$
~Martin

ok through the english version of wikipedia which is suprisingly more detailed, i understood that:
2 affine subspaces are parallel if they share the same direction (the same linear subspace $\vec{A}$)
That is why an equivalence class is fixed via one of these linear subspaces $\vec{A}$
~Martin

Now what I don't understand is A/W and V/W actually are
Quick reminder:
A is set of "dots" or "points" and V is the linear space of vectors with which I can do this:
v+P=Q
W is a linear subspace of V
i would guess that A/W means the affine space A, so the set of points together with the linear space V but without the vectors in W
ok i think i understood it
I need a good YouTube video to learn about Matrices and Linear Algebra. Could someone suggest me please? Tag me for reply
Essence of linear algebra by 3b1b
it's a playlist
Okay. Thank you!
Support the channel on Steady: https://steadyhq.com/en/brightsideofmaths
Or support me via PayPal: https://paypal.me/brightmaths
Or support me via other methods: https://bright.jp-g.de
Watch the whole series: https://bright.jp-g.de/linear-algebra/
Linear Algebra series YouTube-Playlist: https://youtube.com/playlist?list=PLBh2i93oe2quLc5zaxD0WHz...
Syst3ms

In French it's called "Lemme des noyaux" (Kernel lemma)
i've never seen it go by a name in any english books
if it's in axler's book, it probably has a catchphrase at least
I don't know if if this is efficient, but if you can make A be a 4x3 matrix then we have an equation Ax = b. where x is is the weights of columns of A.
So as long as x exists then we know the linear combination exists
so you can multiply both sides on the left by A transpose so we get (A^t)Ax = (A^t)b
now notice that on the left we have (A^{t}A)x
so if we can find the inverse of A^{t}A then we know we can isolate x in a closed form
so you can check if the determinant of A^{t}A is 0 or not
work through the definition of linear combinations. w is a linear combination of v_1,...,v_n if and only if
w = c_1v_1 + ... + c_nv_n where c_j are some scalars.
then you can easily see what to do.
yea thats what i did, and i did get an answer that it's not possible but it took some time
is that the same thing ive done
is there a faster way
i made a 4x3 matrix with the resultant vector at the end
Thanks man!
this drives me crazy...

i have tried some stuff, but it didn't help
this is all i came up with

this doesnt catch the case that U+P is not U+P'
also i dont know how to follow from this to show that U and W are disjunct
I’m taking linear algebra this semester (I’m thinking about a dual degree in math) and I saw on the syllabus that it includes matrix calculus? I have credit for calc 1/2 already, but I’m not enrolled in multi-variable which is really worrying me. Should I start studying up on multi to be okay for that unit or will calc 1/2 background be good enough granted I learn the very basics of multi variable as I go?
maybe they just mean basic matrix arithmetic by "matrix calculus" (that's what I think at least)
i.e. what's a matrix, operations defined on them, how to solve linear systems w/ them etc...
for people who maybe haven't seen matrices in their studies, or just a refresher for ppl who forgot about them
regarding LA vs multivar, LA is usually pretty self-contained, so you should be ok
LA is a nice background to have for multivar
@torn goblet
I could be wrong though, idk your uni
your course could maybe end up talking about matrix norms and numerics and stuff, but it sounds pretty unlikely for a first course in LA
Yea that’s what I heard, hence the decision to take LA first. I think you’re right as-well since I (might have) found the textbook my uni uses (granted it was a different professor) and saw no mention of matrix calc, at least the ones with the partial derivatives and stuff. Thanks a ton lmao. I was about to question my entire existence
does it make sense to think of change-of-basis matrices as linear transformation that is from the space to itself that is also isomorphism? meaning that change of basis is a particular form of linear transformation.
also another question. when looking at a given matrix as a linear transformation say from V->W. does the matrix already imply a given basis in V and in W? because you can't construct a Matrix from a linear transformation without given basis right?
yes and yes i think
This is a particular instance of the primary decomposition theorem. But like, I haven't seen this specific result in the context of linear algebra have a particular name in the english literature. Which is a shame, because it is useful for a bunch of stuff like stablishing both the Jordan decomposition and the rational canonical form.
can someone help me understand this question ?
I don't really understand this question.
The affine transformation k is the anticlockwise rotation through $\pi/2$ about the point $(8,9)$.
By using the translation $h$ that maps the point $(8,9)$ to the origin, and its inverse $h^{-1}$ , find the transformation $k$ in the form of $k(x) = Bx + b$, where $B$ is $2 \times 2$ matrix and $b$ is a column vector with two components.
Unknown101

@crude schooner do you still need help with this
who the fuck uses a row

Taking the transpose of a column vector will give you a row vector, and sometimes you’re forced to work with that in formulas such as a Householder transformation.
every linear functional (on a finite dimensional space) has a representation as a row vector
row vectors arent a typographical nightmare
so vectors should be rows and matrices act from the right
🙂
well what's the bigger nightmare, $$\begin{pmatrix} a_{11} & a_{12}& a_{13} \ a_{21} & a_{22}& a_{23} \ a_{31} & a_{32} & a_{33} \end{pmatrix} \begin{pmatrix}x \ y\ z \end{pmatrix} = \begin{pmatrix} s \ t \ u \end{pmatrix} $$ or $$\begin{pmatrix}x & y & z \end{pmatrix}\begin{pmatrix} a_{11} & a_{12}& a_{13} \ a_{21} & a_{22}& a_{23} \ a_{31} & a_{32} & a_{33} \end{pmatrix} = \begin{pmatrix} s & t & u \end{pmatrix} $$
Denascite

the second one takes up way more space
its literally the same amount of vertical space
you are rarely writing out a whole matrix
horizontal space doesnt matter as long as you stay within the page
you easily run out of horizontal space as soon as the entries get slightly more complicated
no 

f=f(x) is a polynomial and you map it to f(h(x))
what do you think?
I dont know, I'm really having a hard time understanding how linear transformations with polynomials work
maybe I can represent h with some linear combination
of a basis
ok
heres where I tried
T(f) = 0
f(h) = 0
c_0 * h(x)^0 + c_1 * h(x) ^ 1 + ... = 0
I dont know where im going with this
F[x] is infinite dimensional, so you're not going to get a matrix representation
the mapping being described sends an element of F[x], say a polynomial f(x), to the polynomial f(h(x)), another element of F[x]
to be explicit
it might help to use some symbol for it
oh
\phi(f(x)) = f(h(x))
injectivity for linear maps can be proven more easily
f(h) = g(h)
thank you I think I see it now :D
it's enough to show that T(f(x)) = 0 implies f(x) = 0
"kernel is zero" is equivalent to injectivity
less things to write down
now
for the second part
since ive already proved its injective and linear
and I only need to show its surjective if and only if deg(h) = 1
then its an isomorphism if and only if deg(h) =1 ?
"A Linear Transformation of Vector Spaces preserves the vector-space operations" I found this statement in one of my assignments. Is it saying that, for any given linear transformations T: V -> W, that addition and scalar multiplication is always defined the same way for both V and W if T is linear?
no
what does "defined the same way" even mean
you know how like, in vector spaces, you can defined your own addition and scalar multiplication?
it is just saying that T(cx + y) = cT(x) + T(y) for vectors x, y in V and a scalar c
are you asking if the existence of a linear map V -> W says anything about W? the answer is no, in general, since you can just send everything from V to 0 in W
actually, what does it mean to "preserve the vector space operation"
it means what i wrote
oooh i see thanks a lot
.
but isn't this true by definition of a linear transformation?
yes
"linear transformation" and "preserves vector space structures" are the same thing, the second is just more vague
thanks

Seems like its just asking if there exists an x that works
Nothing much about uniqueness

but im misunderstanding part 2
and how to set that portion up
since for 1 i just set matrix a, x1 x2 = matrix b x1 , x2
since x3 && x4 would be the same
By “works” I mean a vector x that is a solution to Ax = e1 and Bx = e2
but im not understnading what to set it equal to in the case of part 2
So you’d set A times x1, x2 to be e1, and B times x1, x2 to be e2
could u write out Matrix A for example? Im not fully following
thank you 🙏
wait i think im getting it
Hello guys, can someone elaborate to me what T represents in this matrix? Our professor has not given us even one discussion the entire semester and I am trying to self-study on this problem

T stands for transpose
surely your professor has talked about matrix transposes at least once during the whole semester? @robust gale
In linear algebra, the transpose of a matrix is an operator which flips a matrix over its diagonal;
that is, it switches the row and column indices of the matrix A by producing another matrix, often denoted by AT (among other notations).The transpose of a matrix was introduced in 1858 by the British mathematician Arthur Cayley. In the case of a...
ahh okay I've seen that one in my book i'll try to scan its content ty!
sadly no TT he hasnt discussed anything
and he came out of nowhere and gave us a final exam
so your professor has told you NOTHING throughout the ENTIRE semester for SEVERAL MONTHS and just gave you problems and went "figure it out on your own, chumps"
Most likely thats the case TT
sounds like a piece of shit professor.
ikr he's gonna drop us if we do not submit the final exam on time
and im out here trying my best to study TT
what authority does he even have lol
Thank you @dusky epoch I now know the answer to the problem! 😄
hes the dean of our department sadly TT
Also, I would like to ask what does the bolded 1 represent in this question... Im trying to search my book for any meaning for the bolded 1 but i couldn't find any TT

maybe a vector (of appropriate size) with all entries 1?
I'd clarify it with your prof tbh if he's receptive to questions
adjacency matrix stuffs
bolded 1 sounds like an appropriately sized vector of all ones
Is it typically written that way or more of a exponent/subscript? TT
But thank you for the idea guys though I am starting to believe our prof did not give all of the resources
it is typically written as a bolded 1
got it thank uuuu!!
Hello, is there any difference with the dimensions between C and D? I am having thoughts that the dimensions of C is q x p

That's correct for C
no
A is a p by q matrix as you are told
and the I's are (presumably) appropriately-sized identity matrices
owww okay is it not possible for A to be a perfect square?
question does not make sense
it is entirely possible for p to be equal to q, or even for them both to be equal to 2, but that's an unnecessary and unjustified assumption for this simple problem
does it not make sense for finding the dimensions of D? because thats the part where I really struggled
i meant that your question of "is it not possible for A to be a perfect square?" does not make sense
"perfect square" usually refers to a property of integers, not matrices.
and under the assumption that you meant to ask "Is it not possible for A to be a square matrix?", see my previous reply.

this is what your D looks like

okay @dusky epoch i'm still trying to internalize what you have said just now 😅 sorry for the confusion I made earlier
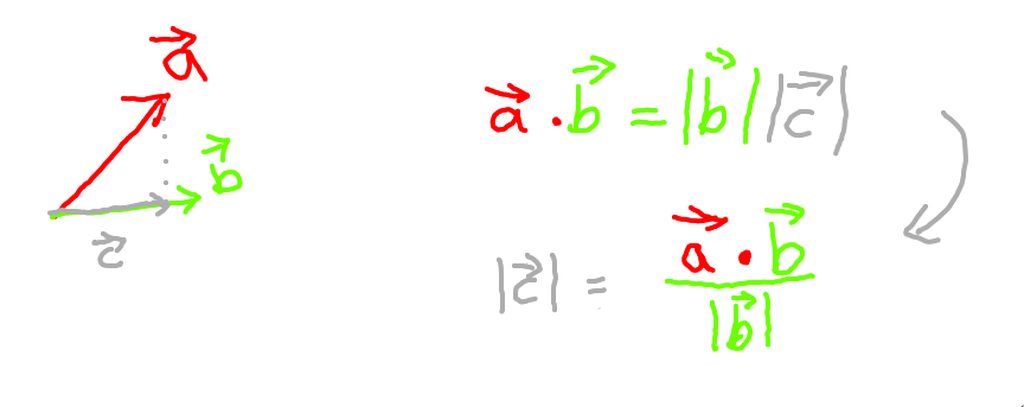
If the dot product is the scalar projection times the length of the vector it's projected on, why, when calculating the "quantity" of a basis vector, do we use the square of the modulous of b in the denominator?
that's just the magnitude of c, but if you want the vector c you want to multiply it by a unit vector in the direction of b, so you have b/|b| multiplying it
that's where the other |b| comes from in the denominator
But if b is the basis vector can't I just multiply it by the length of c?
not all basis vectors are of unit length
it's generally nice to have orthogonal and normalized basis vectors though
What happens if it isn't of unit length? Does it scale too much?
Oh wait I understand now
well if it's not unit length, we just scale out yeah
If |b| = 5 (say), and |c| is 2. It would do 2 * 5 = 10 while we want a b with length 2
Is that right?
I don't quite follow
if |b|=5 then we can define u=b/|b| which now has |u|=1
so then we take (a dot b)/|b|=|c| and have c = |c|u
I think I might be saying it too tersely that it's confusing but I also didn't want to bury it in words either haha, so maybe it's easier to ask about what I said so far
Sorry, If |b| = 5, and |c| is 2, doing 2b would give us a b that is of double length, while we want b to have length two, that's why we use the unit vector
ah, I see what you're saying, you want c to be length two because c=2b is wrong, you want c=2b/|b|
that way we're removing the magnitude of b, sounds like you have the right idea but wrote it slightly off is all
Thanks for your help
yeah you're welcome
another kind of nice thing about projections is we can write them as a matrix, $b\frac{b \cdot a}{b \cdot b}$ can be rewritten in matrix form, assuming they're column vectors, as $\frac{bb^Ta}{b^Tb}$ (the bottom is just the scalar dot product) and we can then see $bb^T$ as a matrix itself, and pull out $a$ to get $\frac{bb^T}{b^Tb} a$ which is nice. Then you can check the simple property that $P=\frac{bb^T}{b^Tb}$ obeys the simple property $P^2=P$, which just says projecting twice is the same as projecting once.
Merosity

That's pretty cool!
😎 👍
I don't understand one thing: introducing $\frac{b}{|b|}$ into $\frac{a \cdot b}{|b|}$ makes it $\frac{(a \cdot b) b}{|b|^2}$ but it should be $\frac{a \cdot b}{|b|^2}$
jet

Where does that b in the numerator go?
why should it be the second thing, the first one you wrote is right $\frac{(a \cdot b)b}{|b|^2}$
Merosity

I'm following an online course and they claim it's the second. Any way to get to it from the first?

He even writes that down see (it is creative-commons licensed, and legal to share a screenshot, in case you're wondering)
I don't see what you're looking at

this looks like the right thing
that's the projection vector, it looks like maybe he's just focusing on this scalar piece individually in the next line below it or something, idk
haha it's fine, it's that guy's fault for having all pastel colors that blend in with the shirt and background haha
How come the image of the kernel is not {0}?

oh nvm its the image of the linear map not the kernel
Hey, I have a question if anyone could help me out:
Given two sets of ℝ² M = ({a, a}: a ∈ ℝ) and N = ({a, 2a}: a ∈ ℝ), are their union (M∪N) and intersection (M∩N) subspaces of ℝ²?
I see that the intersection of two (or more) subspaces of ℝn is always a subspace of ℝn, but, wouldn't in this case be:
M∩N = ({a, b}: b = a & b = 2a)?
which is impossible
it is possible M∩N ={0} which is a subspace
.
but for any other value it isn't right? for instance if a = 1
Well any vector space must contain the zero vector. So necessarily a = 0 if any subset of M is to be a subspace of R^2

Is there a matrix M such that det(M^n) = n?
What book?
afaia det(M^n) = det(M)^n
if det(M) = A, A^n = n
Log_A(n) = n
so it can be true for a specifc n, but you would not get an A such that it is true for all n
Log_A 🤔
lin alg done right by sheldon axler
det M = A
lol that threw me off for a sec
log base A
Yea but capital letters are traditionally matrices
you got me
I don't see this same question in the second edition. Are you reading the first?
I don't know what Axler expects you to say about inf-dim vector spaces, as the book doesn't cover them. Unfair question imo.
@fathom portal
i'm reading the 3rd edition 
Problem 2. On the edge A1C1, of the triangular prism ABCA1B1C1D1, the point M is taken so that A1M = 3MC1. The point N is the midpoint of the segment B1M and the point K is the intersection of the line AN and the plane (BCA1). To find the ratio AK : AN.
Hello! Can someone explain to me the algorithm to solve this problem. How do I know how to get started? There is a solution to the problem here, but it is not in English.

this isn't really #linear-algebra
Remember that the determinant of a matrix is the product of its eigenvalues.
Now
Let M be the $k \times k$ diagonal matrix matrix:
$$
M = \text{diag}(\sqrt[n]{n}, 1, \cdots, 1)
$$
Then the eigenvalues of $M$ are equal to its diagonal values. Moreover:
$$
M^{n} = \text{diag}(n, 1, \cdots, 1)
$$
Has eigenvalues $n,1$, so that the determinant of $M^n$ is equal to $n$ (the product of $n$ with the other eigenvalues, all of which are equal to $1$).

MisterSystem

forgot to type the diag thing
I think the problem is meant to be interpretted as being true for all natural n
but it sounded like they already resolved it
The problem is the following, to prove question $11$ we use the fact that $S : V \rightarrow V$ is a right invertible (surjective) linear operator, but by rank-nullity, every linear endomorphism on a finite dimension vector space that is right invertible (surjective) is left invertible, thus an isomorphism. Which means that there exists an inverse linear operator $S^{-1} \in \mathcal{L}(V)$.
Similarly, $U$ is left invertible and thus, again by rank-nullity, we have that $U$ is an isomorphism and there exists an inverse $U^{-1}$ for $U$.
\
\
Thus, $STU = I \implies T = S^{-1} U^{-1}$. And so $T$ being a composition of invertible linear maps is itself invertible with inverse:
$$
T^{-1} = US
$$
For infinite-dimensional vector spaces, we don't have in general that right invertibility iff left invertibility iff isomorphism for linear maps, so try to work around that to construct counterexamples.
MisterSystem

Ohhh
Yeah, so what I just gave as an answer was pretty dumb

yeah like
think about the space of sequences of real numbers
it is a vector space over the real numbers with component-wise sum and scalar multiplication
now
there is an operation defined on it
called the shift operator
It essentially takes a sequence (x_n)
you can chop off, so you can have injective but not surjective
Yeah, the thing is that the shift operator is injective, but not surjective.
mmhmm
to be more detailed
let's denote by $U : (a_{1}, a_{2}, a_{3}, \cdots) \mapsto (0, a_{1}, a_{2}, \cdots)$.
This is a linear operator on the space of sequences of real number that is injective, thus left invertible, but can't be surjective because its image are the sequences whose first coordinate $0$.
MisterSystem

Now
What is a left inverse for U?
We must have that FU = I if F is a left inverse for U.
Hello, im new to linear-algebra how to start learning? any suggestion
And F is a linear operator as well...
can you write it as F = ST for some S and T?
here: linear algebra done right pdf and solutionbook

thanks
you can make up an s and t for this to work right
yup
as long as (ST)U = I where U is the shift operator
So ST has to be a left inverse for U
but it's on the left
linear algebra done "right"
Precisely
Take T = I
and S be the following operator:
$$
S : (a_{1}, a_{2}, a_{3}, \cdots) \mapsto (a_{2}, a_{3}, a_{4}, \cdots)
$$
MisterSystem

a1 got rekt
It can't be the case that T^{-1} = US
Because T^{-1} is the identity
so it would be the case that US = I
but as we have already seen
U is not right invertible
S not isomorphic so cant be left invertiblee?
because it is not surjective
or right? im confused
No