#linear-algebra
2 messages · Page 290 of 1
.
We saw bases for multilinear forms first semester so the proof is quick
But it doesn’t really tell me anything
@zinc copper general bilinear forms are not really an endomorphism
But both are identified with nxn matrice so there must be a connection somehow
I’ve learnt to take nothing as a coincidence in math anymore
bilinear could be from VxW
Si right now I mainly mean bilinear forms on V
So elements of V^* \otimes V^*
Yeah

On VxW you’re right it wouldn’t be nxn
idk what kind of connection you are looking for
Me neither lol
if the bilinear form is +ve definite then it can be thought of as an inner prod
(also has to be symm)
I mean it’s not so much thought of as defined there is it 🤔
But yeah I’m looking for something else
Cause you get an associated endomorphism which you can describe explicitly by just looking at the matrix but I can’t assign meaning to this endomorphism relative to the bilinear form
Is there even a name for this map/matrix
Yeah but then you don’t have nxn matrices
So different kind of identification
ye
I think this was somewhat on track I’ll see again on paper when I’m done eating
it's like you are applying the transformation before dot'ing them
like x.y but with x.By
"basis" change then you also need to change the basis of x
you can assume x is already there
probably not the right interpretation
it's like pairing x from that new basis
with an y from the old
so you need to transform y to the new one
you are literally changing x then
like 'same coordinates' but in 'different basis' is longer x
$([x]_B)^T[y]_B = ([x]_B)^TB[y]_C$
criver

that's how I would interpret this
i.e. you're given a covector with respect to some basis, and a contravariant vector with respect to another, so you have to transform the contravariant vector to the same basis in order to be able to feed it to the covector
then it goes to some subspace
transformation is much more accurate
Yeah my earlier interpretation is right I think: consider the unique endomorphism $\psi: V^* \to V^$ such that $\psi(e_i^) = \left<e_i, \bullet\right>$. Then its dual has matrix A in the basis $\mathscr{B} = {e_1,…,e_n}$
Not particularly enlightening but I’ve never found anything to be enlightening with dual morphisms anyways
𝓛ittle ℕarwhal ✓

Hmm I guess in a sense a dual morphism can be extended to a bilinear form on V* x V
That's what I mean by paiting the covector and contravariant vector
Typically that's considered a measurement of some sort in physics
The contravariant vector being the thing to be measured and the covector being your measuring device/sensor
what do you mean? like a software to put the matrix into?
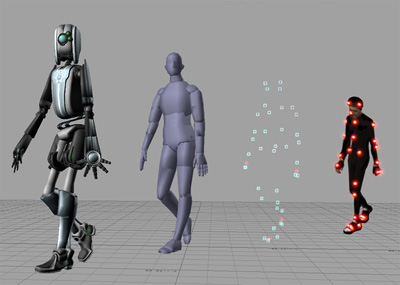
In 3D computer graphics, 3D modeling is the process of developing a mathematical coordinate-based representation of any surface of an object (inanimate or living) in three dimensions via specialized software by manipulating edges, vertices, and polygons in a simulated 3D space.Three-dimensional (3D) models represent a physical body using a colle...
right that makes sense
then I interpret the matrix just as a change of basis or transformations of the contravariant vector
im not trying to create a complex model of the skateboard, just a representation of the length and width, maybe just a 3d rectangle the same length and width of the skateboard.
then apply the rotation matrix to the vertices of the rectangle
if you want to rotate it around its center, then you'll have to translate it to the origin -> rotate -> translate back to its original location
what software can i use to visualize that? i downloaded the free trial of matlab but im not sure if i can use that for this

MATLAB should be able to do it too
alright, thank you.
Quick question regarding matrices: If I factor a matrix to yield 1's along the diagonal and zeroes elsewhere is it still considered an identity matrix?
What do you mean?
if you mean eigendecomposition, then QIQ^T = I, so you're technically factoring the identity matrix still
if you mean A = A * I = I * A, then this is clearly doing nothing
As long as there are 1s along the diagonal and the other elements are 0s its an identity matrix
what have you tried?
should i send ss or something?
nvm, someone's already helping you
I'm probably constructing this matrix wrong because myanswer differs from the book one, my matrix is $\begin{bmatrix} 1/2 & 1/2 \ 1/3 & 2/3 \end{bmatrix}$

Guilhotina ᓇᘏᗢ

and also i don't think i understand leontief model correctly, the rows are the producers of goods and collumns the consumer of goods ?
is there a good visual interpretation to what's happening on in a linear transformation when the algebraic and geometric multiplicities are different?
my reason for asking this is an attempt to understand why you can't have a jordan canonical form even if the field is algebraically closed
Can't have a jordan canonical form even if the field is algebraically closed? What?
you're only given the consumption, nothing about generation. you know that v (your economy state) must be an eigenvector of eigenvalue 1
so Av = v and you now need to solve for A
As for visual interpretation, I'm taking a liking to comparing the generalized eigenspace with k[t]/(t^n)
if I'm wrong here my bad, my interpretation was that you don't always have an eigenbasis for your domain but I might be mistaken and thinking that's equivalent to not having a JCF.
So, having an eigenbasis is equivalent to saying the Jordan canonical form is a diagonal matrix
The cases where there are 1's on the off-diagonal is precisely the case of not having a basis of eigenvectors
oo gotcha
think you could expand on this? I'm assuming this is quotienting by an ideal but I'm lost as to why that's connected
k[t]/(t^2) for example is the k[t] module with basis 1 and t, where t times t is 0
This corresponds to any Jordan block of the form $\begin{psmallmatrix}\lambda&1\0&\lambda\end{psmallmatrix}$
Icy001

Where the k[t] module corresponding to $(k^2,T=\begin{psmallmatrix}\lambda&1\0&\lambda\end{psmallmatrix})$ (here $k$ is the ground field) is isomorphic to $k[t]/(t^2)$ (note that $(T-\lambda)^2=0$
Icy001

Geometrically the Spec of $k[t]/(t^2)$ is a "thickened" point
Icy001

hmmm, hopefully I'll get it after looking over some notes, gimme a hot second but regardless thanks!
How can I do it? The problem says : Show that for this matrix the Leontief equation** x - Cx = d** has a unique equation for every vector d if $c_{21}c_{22} < 1 - c_{11}$

Guilhotina ᓇᘏᗢ

i found the inverse of it
$\begin{bmatrix} 0 & \frac{1}{-c_{21}} \ 1 & \frac{-(1-c_{11})}{c_{21}c_{22}} \end{bmatrix} $
Guilhotina ᓇᘏᗢ

@brittle ingot #prealg-and-algebra
thank you
Can someone explain why is matrix multiplication is not commutative but associative?
I understand why it is not commutative, but I dont understand how something can be associative but not commutative
cause commutativity and associativity are different properties
with no actual connection b/w them
seems to me like the step above (4) should be =, not <= right?

no its pretty much just saying that something <= |something| (the middle term is what makes it need to do this)
u dot v doesn't have to be positive
oop didnt catch that
thanks
i thought it said 2(u.v)
didnt see that norm :((

I'm having trouble with this exercise. For anyone wondering it is not an exam I'm taking, but one from around 2011, so do not worry. This is its translation:
a) Calculate the values of parameter a so that the system is not independent (r(A)=r(A|B)= number of variables).
b) Is there a value of a for which x = 1, y = –3, z = –1 is the only solution in the system?
@neon lake One approach: Put the system into a matrix. Row reduce the matrix. Find values of a for which the reduced system has infinitely many solutions (is that what "not independent" means?).
Yes, I tried to do that, the solutions of the triangular matrix I got were a=2, but solutions said a=2 and a=9 (there's a a-9 in the 2nd row of the same matrix and I dont know what it has to do...)
Here, look

If you aren't sure of how to solve a problem, I often find the best first step is to graph it. In this case, what we're looking for is two values of a such that at least two of the three resulting planes are parallel.
If we graph this in 2d (leaving out the first column), we can see that for a=9, the lines that represent the second and third rows are parallel, which is a fast way to confirm its a valid answer


This is from discreet math, but it's linear manipulation
can anyone explain to me how the second line is achieved?
Arkid

and the next step after that

Thanks
Sorry for interrupting you
I think Im done
if anyone can help clarifying this it'd be nice
it's because of the determinant
if you have a matrix M with determinant |M|, then scaling the matrix by c (i.e. you now have cM) yields |cM| = c^n |M|
where the matrix M is of size nxn
the vertical bars around the matrix denote the determinant
so the straight lines surrounding the matrix mean det
still i don't quite get what they did
what about the first row of the matrix? i’m not following that part
me neither


now it’s even more confusing haha
that makes sense yea
I'll ask him then, the explanation you gave makes sense
and now I see too why it's confusing
i know they want to boil it down to a case where taking the minors makes it easy
so they want to do it along the first col
what about from to the second step of the second line
where he gathers the first column in the first row
i don't understand your question

idk, that looks wrong to me too
it's okay, still thanks a lot
i get the impression they knew the result ahead of time and then did random nonsense to reach it
A trick is to see that it is a circulant matrix, and eigenvalues are given by $f(t_j)=\cos(t_j)+\cos(2t_j)+\cos(3t_j)$ for $t_j=(j-1)2\pi/4$ and $j=1,2,3,4$
What's the intention behind it?
You have the spectrum and can construct the charpoly from that 🙂
Ah I see, that's a nice formula
Sven-Erik

(changed n to 4)
intuitively, associativity lets you move the parenthesis around without affecting the result, so you can do both $(a \circ b) \circ c$ and $a \circ (b \circ c)$. however you can't swap operands around, that's what commutativity lets you do.
matrix multiplication and function composition are two standard examples that are associative but in most cases not commutative. go ahead and try it out for yourself and it'll become more convincing
crossbeam

To show that the transformation $T_\omega : \mathbb{R}^{MN} \rightarrow \mathbb{R}^{MN}$ given by the below equation is linear, I start off by showing that $T(u+v) = T(u) + T(v)$

FantaSkink


FantaSkink

Am I on the right track?
FantaSkink

anyone knows a software to check if a basis is orthonormal?
could anyone link me to some resource that explains the notaiton used here ?

criver

Let V be a vector space over C and T: V to V is a linear operator such that for v in V there exists n in N(naturals) satisfying T^n (v) = v. Show that T is diagonizable.
I tried to solve this like : As every transformation has matrix representaion so we can say A^n x= x or
(A^n-I)x=0 implies A^n=I , which tells us that all the eigenvalues of A are just nth roots of unity , which are distincts, so that means A is diagonizable implies T is
Is my solution ok?
No because n depends on x
but for every n this still the roots of unity
Ok and if I take
1 1
0 1
The eigenvalues are 1 which is also a root of unity
And in your exercise you have NOT A^n = I
What is n ??? It is not even defined
hey i need some help on this question part c

im so stuck like how would i show its surjective??
Pick an arbitrary vector and find its corresponding polynomial
Surjective means that for any element of the codomain you can find its preimage
here it's fairly trivial
hmm can i just use the 1 they gave like a0, a1,...an?
if you have a complex vector (a0, a1, ..., an), then how can you get a complex polynomial of degree at most n?
noo im doing something worng
oh no it would just be the column vector 1,x,x^2,....xn right?
I feel like your thinking too hard about this.
try forming this
$\begin{bmatrix} 1 & x & \ldots & x^n \end{bmatrix} \cdot \begin{bmatrix} a_0 & a_1 & \ldots & a_n \end{bmatrix} = \sum_{i=0}^na_ix^i$
criver

this is just your coefficients multiplied by the basis functions
you know how in R^n you can write a vector as
$\vec{v} = \sum_i a_i \vec{e}_i$
criver

well here it is the same, except e_i are the functions 1, x, x^2, ..., x^n (your monomial basis)
you can in fact write the map S
as
$\frac{1}{k!}\frac{d^k}{dx^k}\biggr|_{x=0}$
criver



How is f(x+y) = f(x) + (y)?
How is f(cx) = cf(x)?
No it’s not right.
 that not what you had before.
that not what you had before.
lmao
Lol now everything is gone.
minimal polynomial of A
that means the monic polynomial of least degree s.t. m(A) == 0
alternatively, it's the monic poly generating the ann(A) in F_A[x]


Can anyone help me to show this?
I checked in the Wikipedia, they used the young’s inequality
But I didn’t learn that in my courses
Is there any ways to start the proof?
Originally I want to try the mathematical induction
Can I just use basic knowledge of vectors and Cauchy Schwartz inequality to prove it?
only saw this now i but ok that kind of makes sense-i haven't really learnt it as like writing it in terms of derivatives and factorials tho yet- Thank you though so much!!
@cold temple there's a typo
it should be $\sum |x_i y_i| \leq \norm{x}_p \norm{y}_q$

and also, why can't you use young's ineq?
Oh yes I can use this as well
then?
Then $\frac{1}{p}+\frac{1}{q}=1$
Trenton

The holder’s conjugate
Then perhaps I can use the natural log
So after taking ln, the power will be bring to the front

I guess I can get something like this
assume $X_n = x_n/\norm{x}_p$ and $Y_n = y_n/\norm{y}_q$

then apply young

Hopefully I didn’t get your message wrong

I’ve got a careless mistake
upto this is correct
Ok
notice that $\sum |x_i|^p = \norm{x}_p^p$

so they will cancel each other out, that's the reason we normalized them
I hope rest is clear?
also, use _p or _q to enforce which norm you are using, otherwise it'll get confusing as there are multiple norms
here


Thank you so much!!!


real and symmetric matrix = self - adjoint matrix or is there any difference? lol
self adjoint is more general
but indeed, real symmetric matrices satisfy the definition

Hi guys,
Disclaimer: This is a homework question.
Question: True or False. the nullspace of a 3X4 matrix cannot consist of only the zero vector.
I know of this theorem, except I don't know how to apply it :

That theorem is not helpful for the question.
What would you suggest ?
do you think the statement is true or false?
I think that the statement is false because the nullspace of A(mXn) is closed under linear combinations. Although, I am not sure if this includes the zero vector.
oh wait
it's true isn't it ?
do you understand why, though?
so you missed the entire question?
yes happens 😄 😅
yea. The nullspace is any sort of vector when multiplied by the matrix A equals zero
Ax=0
all right
the x can be anything in R^n and a zero vector too
so how do you know that there's a nonzero solution to Ax = 0?
now think about the maximum rank a matrix can have, and the relationship between the row and column rank
by "nonzero solution" i mean
and also about the rank-nullity theorem
no matter what matrix A you pick, there exists an x such that Ax = 0 and x is not the zero vector
This thing ?

yes
if you haven't covered rank-nullity, instead imagine what your matrix must do to a basis (say the standard basis of ℝ⁴)
and then use linearity, i.e. aMx + bMy = M(ax+by)
using this, see if you can find a way to construct a vector that isn't 0, but when you multiply M by it, gives 0
hold on, let me start with this: the max rank a matrix can have is one less than the total number of columns ?
the key step is noticing that ||your images must be in ℝ³, but you have 4 of them, so they must be linearly dependent||
||why does this let you conclude the statement is true?||
ok let me figure this out with the info given
Thanks guys I'll let you know if I need more help
guys A is a matrix nxn in K field and P polynomial, S an invertible matrix and ofc S^-1AS. Is it true if i say that P(S^-1AS)=S^-1P(A)S ?
Resolving the components of the vectors in the sense finding the vectors right?
anyone know how to approach this?

for (ii), i'm assuming the answer would be 6.099? since it's the entry with the largest magnitude in the first column
Yes.
i'm not sure about (i) and (iii)
if there's no pivoting, then would the first pivot just be 0.2115 ?
These terms are new to me, so hold on a sec while I look it up.

Take a look at this to help you. https://courses.engr.illinois.edu/cs357/su2013/lectures/lecture07.pdf. Sorry 😢 I am lazy to read it right now.
But it does look interesting.
@tired lance Yes please. Write my dissertation on proving the Collatz conjecture please.
arcuzie

is A a matrix and ^T transposition?
Yes @fringe sierra
Dumb question does $(\mathbb{N}, \mathbb{R})$ from a vector space ?
Zophike1

depending if the natural set contains 0 or not
yes we including zero
yes i believe it is right
there are like axioms to know if something is a vector space or not
Ye I know I was just double checking

yeah I figured 🙂
how do i go about converting this into general form?
i know general form involves an orthogonal vector but i dont know how to get that from this
what's general form in this context?
ax+by+cz = d although where [a,b,c] is orthogonal
that's a plane though
there's no such thing for R^3 lines
oh damn, did not know that
hmm
well this is the actual question. and im thinking it involves projection but having trouble with that line equation

~~2 vectors:
- the vector orthogonal to the line's direction
- a vector through a point on the line and Q
What can you say about the actual length of the first vector mentioned? how might you find it using the second vector i mentoined?~~
1 is where im having trouble, i dont know how to get a vector orthogonal to x
like in general lets say i have a vector [5,8,7,9,0,1,2,3] how do i go about finding a vector orthogonal to this?
yeah that's actually my bad. there are infinitely many vectors orthogonal to a vector in R^3 (and above). so im gonna do some more looking around and if i find a sol ill post it here
i was thinking of shortest distance between point and a plane in R^3

I have A is a matrix nxn in K field and P polynomial, S an invertible matrix and we know SAS^-1 (similarity transformation). I found out P($SAS^{-1})=SP(A)S^{-1}$ is that true? Because my inital guess would be just P(A). Please someone help so I can prove it by induction
dim99
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)


Ann

thanks @dusky epoch

write down how the polynomial would look if the coefficients satisfy the conditions on V_a
that T is an isomorphism should tell you how many basis elements you need
uhhh... lol x_X
what did you get for part 1, then?
whats the difference between a square and symmetric matrix?
a symmetric matrix is a special kind of square matrix
the matrix $\begin{bmatrix} 1 & 1 \ 0 & 1 \end{bmatrix}$ is square and not symmetric
Edd

mhm
cool ty
can someone help me with this? I already asked this but I am still confused

for dimension isn't the formula n(n-1)/2 so the answer should be 10? cuz (5)(4)/2
but its 7? idk
and idk how you get the basis, im confused
what formula is n(n-1)/2? i don't see how that comes up here
first, they tell you A is skew symmetric
the property you mentioned would be true if that were all the info, but you have extra conditions
after that, they tell you that the sum of the components of the first 2 rows of A above the main diagonal is 0
this means you have a sum of 7 elements = 0
one way to interpret this is as a hyperplane with normal [1,1,1,1,1,1,1]
this is 6 dimensional
then you have a similar condition on row 3, so now you have a sum of 2 elements = 0
again a hyperplane, this time with normal [1,1]; this is 1 dimensional
If i have a diagonal matrix that where the diagnoal elements are all distinct, is then the rational canonical form just the same matrix?
always
Is there a difference between rational canonical and rational normal form?
oh so you subtract the ones which are making 0?
but why?
those are already fixed, you can't choose those
yea so 6 elements are 0 right?
mhm
wait but what will be the dimension for the given matrix
what?
also i got this formula cuz in skew symmetric matrix aij=-aji so we have n-1 entries to consider we add up the number of entries, that is
1+2+⋯+(n-1)
yes but that's not the case here
you have fewer degrees of freedom because of the extra constraints
you're ignoring the constraints
the dimension would AT MOST be the one you wrote just now
but as i showed you above, it's smaller
i didn’t understand this
for example
you are told that x + y + z = 0
this is the same as 1x + 1y + 1z = 0
which is the same as [x,y,z] dot [1,1,1] = 0
this last one is the equation of a hyperplane
but what does that have to do with this
this
hyperplanes are n-1 dimensional
this exactly tells you the dimension of what you're looking for
i’m so confused
@bold ermine apply edds logic to the conditions given by sums
the 7 entries above sum to 0. we can write it as the eqn of a hyperplane with normal [1,1,1,1,1,1,1], which is 6 dimensional
I really don't see it (highlighted part). Why is this useful? We can now write any vector in terms of the orthonormal basis, but I don't see why that is important. The next page is Gram-Schmidt Process. Linear Algebra Done Right btw.

It gives an easier way to compute coordinate vectors
cause the ith component is just $\langle v,e_i\rangle$
Mosh

so $v=[\langle v,e_n\rangle,...,\langle v,e_n\rangle]_B$ where $B:={e_1,...,e_n}$
Mosh

whereas to write v wrt a non-orthonormal basis, it'd be harder to have a systematic way of computing the components
I had to chew on that. I think that makes sense. With a non-orthonormal basis, we don't have an easy way to write some vector in terms of it. With an orthonormal basis, we have a standard procedure.
yes
and that standard procedure is do a shit ton of inner products
which is usually actually easy to do
Got it. Thanks for the help.
basically in the "vector space" sense, a "vector" is not necessarily a euclidian vector?

yes
Vectors period are things that can be added together and scaled, and obey the axioms of vector spaces
to which R^n spaces are vector spaces
(assuming standard + and scaling)
by decompose a positive definite Hermitian form into real and imaginary parts. How to show any two forms are equal if they have same imaginary part?
you can use an empty set construction to show every element of it is linearly independent from all other matrices
i think that works, yeah



lol


wikipedia has a very short snippet
An empty matrix is a matrix in which the number of rows or columns (or both) is zero.[73][74] Empty matrices help dealing with maps involving the zero vector space. For example, if A is a 3-by-0 matrix and B is a 0-by-3 matrix, then AB is the 3-by-3 zero matrix corresponding to the null map from a 3-dimensional space V to itself, while BA is a 0-by-0 matrix. There is no common notation for empty matrices, but most computer algebra systems allow creating and computing with them. The determinant of the 0-by-0 matrix is 1 as follows regarding the empty product occurring in the Leibniz formula for the determinant as 1. This value is also consistent with the fact that the identity map from any finite-dimensional space to itself has determinant 1, a fact that is often used as a part of the characterization of determinants.
empty product 😌

kinda like the 0 vector space being spanned by the empty set
ye
i have never seen it used for interesting stuff though
interesting to philosophers
Not really, just some extreme cases which either a) easy base case for induction or b) just for consideration of 'non-negative integers' vs 'strictly positive integers'
n=0 base case are even easier than n=1 base cases, if there is nothing to compute :D
I'm just asking to see because my primitives of the proof require 'linearly independent matrices' so I was wondering if empty matrix is part of it, if so it can be an example for the proof

i don't think that makes much sense
the empty cases are vacuously true
even if the nonempty cases aren't
we prove the matrix of all zeros is linearly independent (given some set, etc)
the base case of the empty matrix is obviously true
although idk if it affects the induction argument
now let...

How come the 2nd question got an answer of 77mm. Can someone mind interpreting it?
the n = 0 case doesn’t imply the n = 1 case here
The question is,
A scene points at coordinates (400, 600, 1200) is respectively projected into an image at coordinates (24, 36) and the camera's principal point is at coordinates (0,0,f). Assuming the aspect ratio of the pixels in the camera is 1. What is the focal length of the camera?
How come the 2nd question got an answer of 77mm. Can someone mind interpreting it?
Someone plz reply I'm desperately in need
How can i find the dimension of the space of linear operators on R^n , such that it maps v to w , where v and w are non zero vectors. Any hint? (By using operator form not matrix form)
given nothing other than L:V->V, where V is R^n?
just one thing more that linear operator maps v to w where v and w are non zero vectors
{A in L(V,V) | Av = w}
this?
and wym by using "operator form and not matrix form"?
yes in mathematical form.
so what i was gonna suggest was to pick a basis and then use matrices
but if i understood your question correctly, you want to talk of invertible matrices, which don't form a vector space
but why?
can i have an answer to my question
n^2-n
no
like writing it into matrix form
so you reject any solution method that involves matrices or bases in any fashion?
let me check question one more time.
why not send the question here and let us see it for ourselves
hey folks, I have 3 vectors in R3: n1, n2, n3. The values that make up n3 are given. I need to find n1 and n2. I know the following:
n1^T n3 = 0 (n1 is orthogonal to n3)
n2^T n3 = 0 (n2 is orthogonal to n3)
n1^T n2 = 0 (n1 is orthogonal to n2)
n1^T n1 = 1 (n1 is a unit vector)
n2^T n2 = 1 (n2 is a unit vector)
Now we have 5 equations and 6 unknowns which makes sense because there are an infinite number of basis vectors that are perpendicular to n3. However, I want to find just one solution by putting these equations in matrix [A]x = b form and solving using the pseudo inverse. In this case x would be in R6 and would be x = [n1;n2]
Can someone help me find the matrix [A] (5x6) and vector b (5x1) that does this?
do you specifically need the pseudo-inverse solution or would any solution do?
because if any solution is fine then pick any vector that is non linearly dependent with n3
then orthonormalize it
and finally produce the other as the cross product of the two known ones
yes i need pseudo inverse sadly (long story)
are numerical solutions ok?
if not then just do the SVD manually, or maybe using a symbolic solver
numerical solution is fine
(infact its preferred)
i'm intrigued by your idea of using the SVD. How do you expect that to work?
this would be a lot easier if you just consider a basis for the plane orthogonal to n3
and then do gram schmidt
interesting!
I've never heard of gram schmidt, but it looks like it needs a matrix as an input. WHat matrix would that be?
a matrix whose columns you want to make an orthonormal basis out of
the first column is kept as is, so you'd put n3 there
the only input info i have is n3 (3x1 vector)
how do you know what pseudo inverses do if you don't know G-S
matlab has a pinv() function 😄

if you know n3, you can make n2 by inspection
and n1 by taking their dot product
then all you need is to normalize n2 and n1

i can do this by hand for some simple n3 vectors no problem
and for complicated ones as well
but letting n1(3) = 1 for example, but i was hoping to code up a way to do this fo rany n3
i think you have... bigger problems
if the determinat of the matrix is 0 it's not invertable
?
Exercise 7.3. Let 𝑉 be the vector space, which consists of all differentiable functions 𝑓: [−1, 1] → ℝ. Which of the following quantities are subspaces of 𝑉?
(a) {𝑓 ∈ 𝑉 | 𝑓(0) = 0},
(b) {𝑓 ∈ 𝑉 | 𝑓(1) = 0},
(c) {𝑓 ∈ 𝑉 | 𝑓(−1) = 1},
(d) {𝑓 ∈ 𝑉 | 𝑓′(0) = 0}.
can someone throw me a bone
🦴
What does it mean for a set of vectors in a vector space to be closed ?
do you have more context?
"The space of any finite set of vectors in a vector space is closed under addition and scalar multiplication"
But I don't know what it's referring to when it says closed
a set is closed under addition/multiplication when those operations on the members of the set dont allow you to "leave" the set
so this is not true?
is this the full question?
It gives you one possible solution
An operation is 'closed' within a set if that operation takes parameter(s) from the set as input and it output something that's also in that set.
You also say 'the set is closed under the operation' to mean the same thing
Yeah
do u have a pic
Ty
very funny 

to do this, all i have to do is make a 3x3 matrix with them and if the det is not 0 they are linearly independent?
That is sufficient yes
Since they are both TFAE statements that the matrix is invertible

just started learning lin alg on my own time and
im kinda confused on matrix multiplication
$C_{ij} = \sum_{k=1}^{K}A_{ik}B_{kj}$
criver

What are you confused about?
oh wait i think i figured it out
textbook that i was recommended was kinda confusing
The definition or how one comes up with said definition
You can always try various textbooks
See which you like best for a specific topic
idk about calc, but alongside analytic geometry it makes sense because you gain geometric intuition
As far as calc goes, probably makes sense studying it alongside mechanics
how do I take the gradient of this

not #linear-algebra
but use the chain and product rules
it is literally an exercise in my linear alg course tho :/
it's technically calculus
eitherway product and chain rule
Differentiate wrt a, then wrt b, then wrt c
what is the definition of gradient?
well look it up

In vector calculus, the gradient of a scalar-valued differentiable function f of several variables is the vector field (or vector-valued function)
∇
f
{\displaystyle \nabla f}
whose value at a point
p
{\displaystyle p}
is the vector whose components are...


no
with the partial in b and c
The gradient is a vector
what you wrote is a scalar
even provided you fix the db, dc
Look up the section I linked
$\nabla f (p) = \begin{bmatrix} \frac{\partial f}{\partial x_1}(p)\ \ldots \ \frac{\partial f}{\partial x_n} (p) \end{bmatrix}$
criver

on your case p = (a,b,c), x_1 = a, x_2 = b, x_3 = c


criver

Why are you doing these additions tho?
yea that doesnt help me tho
$\nabla f (p) = \begin{bmatrix} \frac{\partial f}{\partial x_1}(p)\ \ldots \ \frac{\partial f}{\partial x_n} (p) \end{bmatrix}$
Yeah, you contrust a 3d vector
criver

Not do a summation
please remember I am not good at math telling me it is a vector does not help me
Do you know how a R^3 vector looks like
Ok, now instead of a,b,c put the partial derivatives there
It's literally that

yeah
lmao no
pdes means partial differetial equations
You need the product and chain rules
can you give me an example?
maybe for the first one

this is the chainrule right?
Yes.
In this section we discuss one of the more useful and important differentiation formulas, The Chain Rule. With the chain rule in hand we will be able to differentiate a much wider variety of functions. As you will see throughout the rest of your Calculus courses a great many of derivatives you take will involve the chain rule!
y is the function f(a,b,c)?
You should read a book or something
It will be more productive
I don't think most people here will be willing to solve it for you, for didactic reasons
If you are already familiar with it, and you read it again, it will be easier to remember
Functions.
y is f(a,b,c)?
ok, you want someone to spoon feed you the chain and product rule
telling me what y and u is, is spoon feeding?
You can literally read the article that criver gave you in like, 5 minutes or so
yes
ok 
Read the article and if you have specific doubts we can help you to solve'em
hey guys, does deta not equaling zero have something to do with this?

The determinant of A not being equal to zero
the fact the inverse exists is the important part

suppose y=(x-1)^3
in this case
u=x-1
y=u^3
dy/dx=dy/du du/dx=d(u^3)/du d(x-1)/dx
Something like this, maybe it help?
@amber osprey just read this, it won’t take long and it will help
as long as you have some knowledge on derivatives that is
also yeah people say you don’t need calculus for LA
but i sure do see a lot of calculus in my LA book
what book
linear algebra done wrong
why wrong instead of right
parody in a way
says in the first few pages
anyways this is kind of a discussion so 
#serious-discussion if you want

Is t supposed to be real?
thats all the info i have sadly
Drink Drake

So pick $t_0, t_1$ such that
$t_0^2-t_1^2-a$ is negative
Drink Drake

why did you do (a+t)-(a+t)
ok but what if i wanted to prove them seperately how would i proceed
If you are asking for motivation,we want to get a case where t^2 is negative
i just dont understand for what values of t its not closed under vector addition
because a e R numbers so like how can it not be closed
For all values of t,it will be in the set
But if t^2 were negative,there would be no such t

Oh wait t is a fixed constant,mb
Set of reals
ok nvm
so its still gonna be part of real numbers then
even if i mulitply by -1 or whatever
$ca+ct^2=(ca+(c-1)t^2) + t^2$
Drink Drake

@native rampart what are you even saying tbh
🤨
Scalar multiplication will land you inside the set
No it wont
Always
so mosh what did you mean by If you add 2 elements, you dont get an element in V
Ok,I am dumb
me too bruh
I was thinking t is a real variable
$a+t^2+b+t^2=a+b+2t^2$
Mosh

what does RHS mean
why is it not part of V, how does what you wrote violated a e R
2 != 1
it.... doesn't?
a and b are real numbers
I just didn't feel the need to say that explicitly cause I'm implicitly taking polys from the set
ok so what we have 2t instead of 1t what exactly does that change
but why does it have to be 1 im so confused
, shouldnt it be written on the right hand side then, it only tells us a e R
i thought the right hand side was supposed to be like the rules for the set or something
if $a,b\in\mathbb{R}$, then $a+t^2\in V$ and $b+t^2\in V$
Mosh

yes?
yes
now $a+t^2+b+t^2=(a+b)+2t^2$
Mosh

yes?
yes
Now, does this match the form exactly as stuff in V?
Well, we check both terms
is a+b a real number?
yes
ok so basically if i got some stuff like this, after the va, sm it has to match the coefficients exactly
ok but we dont have to match a,b because its said that it has to be real set
Now apply a similar process for scaling
so like 2(a+t^2) = 2a which is part of a e R but 2t^2 does not match so its not closed under SM
Mosh

alright then, big brain stuff right here
$U:={a+ct^2|a,c\in\mathbb{R}}$ however, is a subspace of $\mathbb{R}[t]_{\leq 2}$
Mosh

still havent gotten the hang of subspaces yet but i will save that for later
It's just testing the 3 requirements
A brief description and guide on how to use me was sent to your DMs!
Please use ,list to see a list of all my commands, and ,help cmd to get detailed help on a command!
Wolfram Alpha doesn't understand your query!
Perhaps try rephrasing your question?
Click here to refine your query online
wolfram alpha is not a do-your-homework tool
also your question isn't linear algebra
hmm yea
:/ it is not my h.w.
it was a sample paper for iit enterance
Does anyone have a suggestion for a numerical iterative method for quickly computing an underestimate of the smallest eigenvalue of a SPD matrix?
(I am aware of the power method, I would like something better)
Hi, I'm currently self-learning MIT's OCW linear algebra course and am pretty lost with one of their problem sets (here: https://ocw.mit.edu/courses/mathematics/18-06sc-linear-algebra-fall-2011/ax-b-and-the-four-subspaces/matrix-spaces-rank-1-small-world-graphs/MIT18_06SCF11_Ses1.11sol.pdf)
I was already having trouble understanding Problem 11.2b, but for part c) I completely don't understand how the dimension of the "column space" is 6. Could someone help derive this for me?
More importantly, I also don't get why the dimensions of the pseudo-"null space" and "column space" should add up to the dimension of the space of inputs to M. I suspect I'm lacking in some form of conceptual understanding...
you need to take a step back
do you know what the dimension of a vector space is?
and have you seen the rank nullity theorem, or alternatively what strang calls the "fundamental theorem of linear algebra"
I think I do. It's the number of elements in the basis?
the latter sounds familiar, but I can't recall it... I'll look it up!
well, the column space is the vector space spanned by the columns of a matrix
so you can find its dimension by finding out how many lin indep columns a matrix has
Right. The "column space" (in quotes, because even the question acknowledges it's not a real column space I think) that was derived in the earlier part of the question consisted of a matrix populated by variables, so I don't think I can do elimination to find the lin indep columns and thus the basis.
Besides, the matrix for the "column space" has 3 columns - so how can the dimension be 6?
Apologies for the long-windedness, and thanks for your input!!
so
the formulation is a little tricky
you should instead think of it as some linear transformation T:V->V
where V is the vector space of 3x3 matrices
V has dimension 9
the transformation T:V->V is doing something to the matrices in V, and outputting only a subset of the matrices in V
presumably, this subset of V will be a subspace
if it helps you visualize it, you can treat the 3x3 matrices as vectors in R^9
then the transformation T:V->V in some basis is given by a 9x9 matrix
and the question involves the columns of this 9x9 matrix
not the columns of A
the reason they write "column space" is that they didn't give you any matrix
so they actually mean the image of the transformation $T: X \mapsto AX, ,, X \in \mathbb{R}^{3 \times 3}, ,, A = [...]$
the image and the kernel of T
Edd

Thank you so much for your response @lavish jewel! I took a while to digest it and had to do some googling here and there... but ultimately I think I get what you were trying to convey.
I really appreciate your help!!

didn't we discuss that already
you can pick any orthonormal system with one of the vectors being n3
there are infinitely many such solutions
here's one possible solution with a numerically stable algorithm for computing it: https://jcgt.org/published/0006/01/01/
Yep we did! And yes, I can absolutely do it this way. But I really want to find a linear algebra solution to this by solving for [Bt; n3t] [B n3 ] = I
all of the suggested solutions are "linear algebra solutions"
and yes, you're right there's an infinite number of solutions (because there are an infinite number of paris n1 and n2 that are all orthogonal to each other and orthogonal to n3). But I only seek 1 (without preference). I'm really looking for a way to do this using linear algebra. I've already looked into Gram–Schmidt and that works as well once i define a set of linearly independant vectors n1 and n2
But I only seek 1 (without preference).
did you read the paper I linked?
yes i have
then you should be aware it gives you one solution
Gram-Schmidt is linear algebra btw
and i was hoping specifically there would be a way of inverting B^T or something along those lines (using matrix algebra)
I am unclear what linear algebra means for you, or what kind of solution you expect to get
there are infinitely many pseudo-inverses of it
that's the whole point of having infinitely many solutions
you can pick any solution (e.g. the one from the paper)
and produce any other by a rotation and potentially a reflection
ah yep, once you get n2 then you could easily multiply it by the rotation matrix about n3
and that would get you n1
rather once you have n1 and n2
you can rotate bouth around n3
to get any other solution
for solutions with different handedness you need a reflection too
let's say that the RHS of this equation wasn't the identity (but it was symmetric & positive definite). How could you solve for a solution of B?
in other words, i want to turn this isn't a complete abstract matrix algebra problem that has no connection to orthogonality
i'm looking for a proof something along hte lines of this (although it's problem statement is slightly different)
https://math.stackexchange.com/questions/2858299/solve-xtx-a-for-x

Mathematics Stack Exchange
How does one solve the equation
$$X^TX=A$$
for $X$ given $A$ is an $n×n$ matrix, $X$ is $m×n$, and $rank(A)<min(m,n)$?
I know this must be simple, but I have been wrestling with it for some t...
you can do Cholesky for X^TX provided A is spd
if A is symmetric, A = QDQ^T
then take the sqrt of each element in D
A = Q D^1/2 D^1/2 Q^T
then X^T = Q D^1/2
won't this result in complex D^{1/2} in the general case?
and in the specific case where A = I then Q = I and D = I, right? So wont that mean that X = I ?
so is there a way i can solve for B using a similar method to the one you just used?
oh, you know n3?
it just shifts the problem to choosing a basis for the 0 eigenvalues
you can make infinitely many solutions by picking n1 and n2 as an orthonormal basis for the plane orthogonal to n3
you will have to make that choice regardless how you rewrite the problem
yeah there is no unique way to do this
if you add some additional constraint that is linearly independent then you can get a unique solution
it's what they implicitly do here: https://jcgt.org/published/0006/01/01/
it's also what you would do if you were to pick a vector linearly independent from n3 and applied Gram-Schmidt
then the remaining vector is defined up to sign
what's the difference in "LA done right" "s.friedberg linear algebra" on the approach to the subject?
I see friedberg as a more complete linear algebra book. Theory and computation where axler is just theory .
Also determinant is not done properly in axler from what I have heard.
Friedberg would be a better introduction to the subject than axler is what I am saying.
How do I show that $T(u+v)= T(u) + T(v)$ for an image convolution with a kernel?
FantaSkink


{kind=link}
simple enough
you have your function defined for some input O
now substitute O = (U + V)
then distribute the omega term to both and split the sum
if you want something more esoteric, you can show that, after vectorizing the image O, the 2D convolution shown here is equivalent to multiplying a matrix with a 2 level block toeplitz structure
and matrix multiplication is linear
it might help to do it with a 1D case first, where the convolution is then represented by a toeplitz matrix without a block structure

I'll try that, thanks man
$||AB|| \leq ||A|| ||B||,$ where A and B are n-by-n matrices.
seth.delacroix

Is there a way to do it in general, or can I pick a norm and then argue from equivalence of norms?
these are operator norms?
induced by vector p norms, or?
because it's not true for some special norms like the max norm
i think it's true for the norms induced by the p norms though
if you construct the operator norm as max_x norm(Ax) with norm(x) = 1, you can apply the definition twice
i.e. ABx, subs Bx = y and then apply the def to Ay, and then to Bx
so why is the answer E?

since i dont find any other vector that would also work, and i assume the 0 vector is also a scalar multiple of that vector
0 is a scalar multiple of any vector
cause 0v=0
i agree. so why is E actually false?
Solve the system and find a basis for the kernel?
How difficult is linear algebra to self teach with a prerequisite of calc 3?
@oblique prairie
about as hard as any other math class tbh
if you've already learned calc 3 you've hopefully already touched on some linear algebra
like matrices and vector spaces and whatnot
How comprehensible are the concepts relative to calculus?
right which i think (-5,1,1,0) is the right vector, so E should not be false, so E is not the answer, but E is (nvm there is another vector that is part of the kernel that i overlooked, solved*)
<@&286206848099549185>

what i dont get is that there is supposed to be a matrix A that gets multiplied to f(t) and yields T(f(t)) but wouldnt there be t variables in there instead just a vector of constants f(a1) ... f(an)
no t is just a point in the domain of f. t is actually not necessary for this problem and only adds confusion.
@meager harness we multiply the coordinate vector of f wrt the basis by A, not f itself
For any transformation to be a projection, it just has to be endomorphic and idempotent right?
@wintry steppe yes
Thank you
[-8,2,0,1]
Hi

what is the significance of k=/= i,j
wouldn't it be the same if it hadn't written k=/=i,j
Drink Drake

its the levi civita symbol
Yea
but then it says k=/= i,j doesn't that mean my i and j for each term has to be different ?
for example
if i = 3 and j = 2
i would just get
e321e321+e322+e322+e323e323
here k = j
doesnt this violate k =/= i,j
Yea,you skip cases of k where k is I or j
Something seems wrong with the equation you wrote
If i=j it's clearly wrong
And k!=i,j is not needed, because the term will reduce to 0 in those cases
$\sum_{k} \varepsilon_{ijk}^2 = 1, i≠j$
this i understand, i was just wondering what the significance of writing k=/= i, j is
Drink Drake

There's none
mhmm i see thank you
Where did you find this equation exactly
This one seems like a cleaner version of your version
i got this from a classical mech textbook
and physics textbooks usually make minor mistakes with math maybe
Yea,or maybe the author didn't want students to expand terms that have j=k or i=k
Because they will reduce to 0 anyway
yeah
If you want a meaning for this(and hence your statement) this basically says if i and j are fixed different numbers, there's exactly one permutation as k varies over everything else
For example say i=2,j=3