#linear-algebra
2 messages · Page 284 of 1
am i the only one who has trouble understanding the answer options
no, only 3 makes some sense as the question is asked
1 and 2 make no sense in the context of the sentence
maybe AxB=0 is the option
A x B = 0 means A,B are parallel, so it's still A= B = 0, so probably not it.
A dot B = 0 will work though for any A,B
Ah yeah, here we go
let OP tell us that
$|A+B|^2 = |A|^2 + |B|^2 + 2(A \cdot B) = |A|^2 + |B|^2 - 2(A \cdot B) = |A-B|^2 \implies A\cdot B = 0$
yes
criver

This tells you what. That only the diagonals of a rectangle can be of equal length I think
how to calculate basis of a matrix when eigenvalue is not given?
?
Is V a subspace of V+W?
is {a,b} a subset of {a}?
not direct sum
my question still holds
then you can try to answer it yourself
W a subspace of V?
V is a subspace of V+W
yes that's tivial
ur trivial
didn't you ask the 'other way around'?
I am not sure if this is the correct channel but I want to know about tensor analysis. I know fundamental linear algebra and up to undergrad engineering mathematics (computers). I want to know it through a book medium because I tend to not remember concepts well if I read it from a computer.
you can start with that, then you can try something more serious
it's fairly short
thank you
I'm taking the eigendecomposition of a matrix and getting its transpose as a result
so decomposing X as ADA^T actually gives me X^T
is there some property of a matrix that might cause this?
the decomposition is in python btw, not manual

thats not the same
can you show your X
yes, its

that's not symmetric
decomposition gives

why are you doing ADA^T?


let me decompose my self
that sounds hilarious

first of all the matrix is not symmetric
so you shouldn't get a orthonormal basis to begin with
the second matrix they sent is symmetric
but i still don't get which one they wanna evd

thx
that was the result of ADA^T, which is supposed to be symmetric
ive only been decomposing symmetric matrices as of late and brain farted lmao
icic
we dont have to fully prove, only justify, but how do I explain this is false? (without determinants)
are you considering matrices over the real numbers or over the complex numbers?
@hardy inlet
idk if this is possible without invoking determinants though 
field is C?
Its R or C
i see

I just dont know how to do it without determinanta

I tried something like this earlier but its all borked

oh, I meant "I see" why that works. Not that I see the matrix. latex isn't hard to read
in a basis, can one or more of the vectors be the zero vector?
@dusky epoch @hardy inlet doable w/o det, just tedious
this makes the set linearly dependent hence not a basis
i’m trying to understand from ladw and i’m not really getting it, so do you mind briefly explaining why?
i’m trying my best lol
whats ur def of linearly dependent
oh shoot i just realized
because you can rearrange the term on one side
and make the zero vector = every other term
right?
and that would be a nontrivial combination
whats ur def of linearly dependent
is what i did

oops latex error but ignore that lol
a system is linearly dependent if the zero vector can be represented as a nontrivial linear combination
correction*

according to the logic theres a step implicitly done but not explicitly said which is bad
whats x,y

if a vector in a system is 0, assign it a nonzero weight
what does that mean
theres more

theres some contradiction here
yeah i misread the statement lol
you tricked me to give an answer
no i
we're assuming there exists an eigenvector (x,y)

I thought it said there isn't a matrix
and showing it has a nonreal eigenvalue
eigenvectors must be nonzero so theres another condition on x,y
namely x!=0 or y!=0
this is what allows u to divide by x,y in respective cases

not rly and its not equivalent to "or"
ohhh ok
(x,y) is nonzero if at least one of x,y is nonzero

when taking a linear combo, weight refers to the scalars put in front of each vector
my wording would go
suppose for sake of contradiction there exists an eigenvector v with a real eigenvalue lambda. it has the form v=(x,y) where x!=0 or y!=0
ok i think i get it now thanks
this has already been said
this makes the set linearly dependent hence not a basis
im using the given def of dependence to show WHY its dependent
im having a brain fart. How do I get the eigenvector out of an eigenvalue
are these typos or am I crazy?

wdym?
you mean find the eigenspace?

there's not a lone eigenvector
Is this good for the eigenpair 0, (0 1)
finding the 0-eigenspace is the same as finding ker(A-0I)=ker(A)
Facts
but yes, your eigenspace is span([0,1]) in that case
since x=0 and y is free
so [x,y]=[0,y]=y[0,1]=span([0,1])
i left out the eigenspace cause technically we haven't talked about those but I know what ur talking about yes

what does a Linear Operator T mean
@molten pilot kx already answered
he did the last 2 and then i noticed the first and I thought "maybe we're both crazy"
shouldn't that be just $\vec{x}$?
yes
So for this, my friend claims there are infinite subspaces because of the infinite scalar multiples; but I dont believe that. The eigenspace of the respective eigenvalues is a single subspace right; thats the definition of a subspace

infinite eigen vectors, not subspaces
yes, eigenspace is a subspace
ok thanks. I'll have to compute but there should be the spaces spanned by (1,0) and (0,1) right
idk if u guys can tell or not idk whats possible
but i assume its that cause its the mirror of that one example i had
there's at most 2 eigenspaces
opposite of this right

the 0-space and whatever else
that looks like nonsense given the question tbh
cause nowhere did you discuss sum of eigenvalues
oops wait did i shit I hate latex one sec
thanks for pointing that out

was my answer for f tho. accidentally \include{blah.tex} on the wrong \item

probably better would be to show that A-3I is non-singular
uhh fancy words 😨
I feel like this is just worded very poorly
pick u,v from the same eigenspace
QED cause they're in the same span
yeah that's fine, could and should be flushed out though
Why can't a 2x2 matrix have 3 eigenvalues?
yeah... im in a rush otherwise i'd flesh it out. Wait it can have 3??
If you're not gonna explicitly show the char poly
what?
when did I ever say that?
"Why can't a 2x2 matrix have 3 eigenvalues?" implies the possibility that there may be 3
No
ok so ur just saying I never proved it
You never gave justification that 1 and 2 were the only eigenvalues, no
brief comment on fundamental theorem of algebra is sufficient though
Like the only hole is "Why isn't 3 an eigenvalue?"
is this correct enough


uh my friend said they got 3. (i got 4) am I wrong; are they wrong; or are we both wrong

Is the T(u) + T(w) \in U + W step justified by "the sum of subspaces" definition?


yes
Ok thanks
4 should be correct
i think im slowly learning more
its painful; but im getting there
Is a reflection over x=y
T(x,y) = (y,x)
yes


yeah thats good
for explicit clarity though, since its ambiguous here,
$A=\bigg[
\begin{array}{cc}
T(e_1)&T(e_2)
\end{array}
\bigg]$
assuming T(e1) and T(e2) are column vectors
o rip texit bot

still offline?
guess so
sad

so m equations and n unknowns means
m x n matrix
but rank m means that there are m unknowns
no?
number of columns is the number of unknowns
rank is the number of pivots
yes
if you mean row reduce, then no. the matrix stays the same size always.
but if you mean you start lobbing off and ignoring non pivot columns, then yeah it would be mxm i guess.
but we dont typically do that
but dimension of row space is m
yes that is true

i think that means "range of the transformation given by the matrix A is F^m"
L_A is the notation for the transformation given by the matrix A iirc
F^m is basically the more general form of R^m. so yeah you can basically think of it as a column vector with m entries. rather than real numbers, though, the entries are the elements of some "field" F. the real numbers form a field.
ah okay thx
ye i got that
Would this be a proof by contradiction?

idk, try it and find out
good?

oops case 2*
gonna call 7 good; I've been dreading #6 though

T and S-1 T S have the same determinant, from there you can almost conclude
also why would lambda = 0 imply z1 = 0 ?
we cant use determinants
oh alright


it's yes:
You can set the x component with ease, then pick the scalar for v_2 to fix the z component
im not understanding the second part to fix the z component
[x1,0,x3]=[x1,0,2x1]+a[0,0,1]
@burnt hearth
you pick a to fix the fact the z component is 2x1 not x3

How would I approach problem 3? I found the answer is no, and I believe it's bc it's no bc it doesn't cover non-integer values. However, while I can quickly glance and see that now, how would I mathematically prove that?
you'd have to appeal to the list of axioms for a subspace, say which ones it fails in particular and why, which isn't too far off from what you've said

i don’t really understand the highlighted part, can someone explain?
i’ve been thinking about it for a bit and i still don’t get it
if you have a linear combination of v1 up to vp, you can express vk as a combination of the other ones to get a combination in terms of v1, ...., vp without vk
write it out
ok
let's say V={(1,0,0),(0,1,0),(0,0,1),(1,1,1)} with vj element of V, what would be vk here
i’m writing it out and i really don’t get it
i’m probably just doing it wrong
i honestly don’t know sorry
is the set Lin. independent ?
take any v in V
write it as a combo of the v_j
if $$v_k = \sum_{j \neq k} a_jv_j$$ then $$\sum_j b_jv_j = b_kv_k + \sum_{j\neq k}b_jv_j = \sum_{j \neq k}(b_ka_j + b_j)v_j$$
TTerra

write v_k as a combo of the other v_j
oh shoot it’s v_4 = v_1+v_2+v_3 
donot bully the boi
so v_4 is the vector that makes the set linearly dependant right?
what happens if u remove the stupid annoying vector v_4
it’s linearly dependent?
yes
i am not sure really
so removing v4 u will get V={v1, v2, v3}
can any vj be a lin combination of other vj
no
then the set became linearly in dependant
why can you just remove v_4 though?
?
if $v_n$ can be written as a linear combination of ${v_1, ..., v_{n-1}}$ then $v_n = b_1v_1 + \cdots + b_{n-1} v_{n-1}$, right?
∧res

yes ares
for some b_1, ... b_{n-1}
but then
$$a_1v_1 + a_2v_2 + \cdots + a_{n-1}v_{n-1} + a_n v_n = a_1v_1 + a_2v_2 + \cdots + a_{n-1}v_{n-1} + a_n (b_1 v_1 + \cdots + b_{n-1}v_{n-1}$$
∧res

yikes
sigma notation is a thing for a reason
yes
but then
$a_1v_1 + a_2v_2 + \cdots + a_{n-1}v_{n-1} + a_n v_n = a_1v_1 + a_2v_2 + \cdots + a_{n-1}v_{n-1} + a_n (b_1 v_1 + \cdots + b_{n-1}v_{n-1}$
quantum

i forgot a parentheses on the right, but anyway
the point is your thing is now written as a linear combination of the v_1,...v_{n-1}
so you didn't need v_n in the first place
oh ok i think i get it now
i don’t know how to explain why i wasn’t getting it but i just wasn’t lol
thanks
lol np

i’m not sure how to proceed, could someone help?
although i’m not really sure if i’m doing it correctly in the first place lol
Don't assume the w's can be linearly combined to 0. The intuition is that they all lie on the same plane.
Instead find a linear combination of w's equal to 0
actually that equation that you get at the end will let you work it out
wait don’t i kinda already have that
yeah
so what should i do next? other than maybe rephrase some stuff
find b's in terms of a's
depending on what exactly your professor expects as an answer, you could provide a really simpler solution
aye @feral mountain if you are good at linear can you look at my question in helpers
i don’t have a professor, i’m doing this on my own time
what’s the easier way?
oh alright
$dim(span({v1,v2,v3}) < 3$ and $w1,w2,w3 \in span({v1,v2,v3}) \implies w1,w2,w3$ are linearly dependent
Entelechy

unfortunately the book i’m using hasn’t taught that yet
oh alright, do you understand it anyway ?
no
Lol
okay you'll come across these notations eventually, you can carry on your calculations 😛
Can you look at my question @wintry steppe
In helpers
Well it’s not actually a question
okay I'll have a look
I need explanation to something
I didn’t understand the question at all
I tagged you @wintry steppe
how exactly does the equation imply that $b_1+b_3=a_1$, $b_1+b_2=a_2$, $b_2+b_3=a_3$?
quantum

Is that also linear algebra?
yes
they could be unequal, but it suffices to find b in terms of a to satisfy those equations
I haven’t seen you in ages @feral mountain
yes recently I've felt like coming back on here
maybe, I gradually look through the help channels
@oblique prairie and after don't forget to notice that your b's can't be all 0
ok i got the bs in terms of as, how can i check to see that not all the bs are 0?
should i just set them all equal to 0 and see if the equation has a solution, knowing that no a can be 0?
@feral mountain

yeah i solved that already
is that yeah a response to this?
yes
ok
Can i say that matrix of order n×n is invertible iff its rank is n ?
Okay ty !
Any ideas? I’m a bit lost here since A and B aren’t necessarily 0

you are already given that A_iB=0 and these A_i forms a basis of W
you don't know that they form a basis nor do you need to
@fringe zodiac do you still need help with this?
true
btw i never asked, should i ask set theory question here or is it not in linear algebra ?
#discrete-math is better for that
ooh ok thx
[Endomorphism’s reduction]
(for those interested and to exchange views about it)
Let f : ℝ —> ℂ be a bounded continuous function such that the space E = {Span(x —> f(x + k)) : k ∈ ℤ} is of finite dimension. What about f ?
Yes
is this an assignment
Consider the polynomial 𝑝 (𝑥) = 𝑎 + 𝑏𝑥 + 𝑐𝑥2. Set up a linear system of equations so that p passes through the last three data points. Solve the equation system using elementary row operations. Plot the result
time (min) 2,0 5,0 8,0 10,0 11,0
temp (◦C) 35,0 40,0 50,0 65,0 70,0
can someone help me start
no, it's only to exchange views about it
(It’s an exercises that I have prepared during this year when we were on endomorphism’s reduction chapter and it’s an exercise extracted from ENS oral maths exam)

já tentei bastante mas não consigo encontrar o polinômio característico, alguém ajuda ?
It’s a good intuition 😄, how did u think about that ? And can u write a proof for the case where dim(E)=1 and send it here ?
estou errando algum cálculo
well if dim(E) = 1 then f satisfies f(x+1) = kf(x) for all x, and k not being a root of unity will make this function unbounded i think...
in that case i don't know :x all i can say is to check it in wolfram or octave
Yes, me I have this if dim(E)=1 :
Let g : x → f(x + 1). (f, g) is linked and f and g are nonzero (otherwise not interesting), so we can write g = μf for some real μ, then by induction we have f(x + k) = μ^{k}f(x) for any real x and any integer k, or by letting k tend to ±∞, |μ| = 1, and therefore f(x + 2) = μ^{2}f(x) = f(x) and finally f is 2-periodic.
Now, we must study the general case 😄
https://www.youtube.com/watch?v=APKu4HOVrik at 2:18 doesn't "minimizing the quadratic" just simplify the expression and result with the same number? Also, any ideas how he got -b/2a? I'm generally confused by the steps to find dmin
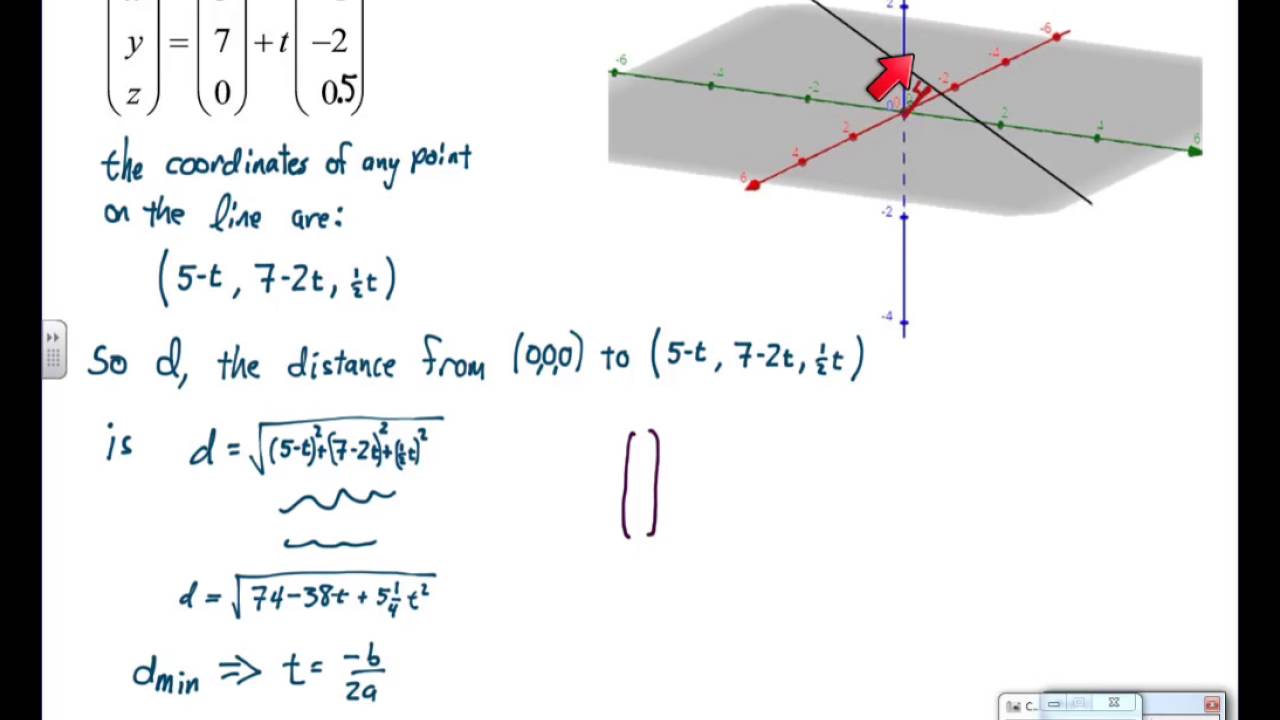
This video screencast was created with Doceri on an iPad. Doceri is free in the iTunes app store. Learn more at http://www.doceri.com
How could I find the points P_1 found on line L_1 and P_2 found on L_2?
I have found the distance P_1P_2
Now I am supposed to use the fact that P_1P_2 is orthogonal to L_1 and L_2 to find points P_1 and P_2..
Any tips?

can some1 help me with e?
i found [T]_b by looking at the eigen values of T[e_n]
but idk how to find the actual basis
Hey, quick question regarding ordering of PSD matrices
Suppose I have got this Hessian

and I restrict x1 and x2 as follows

sorry server busy :(
Whoever knows will reply. Regardless of my post
ok
@wintry steppe is question is not clear
wym by "eigen values of T[e_n]"?
like basis 1 0 0 , 0 x 0, 0 0 x^2
you mean elementwise order?
pick the basis {1, x, x^2}
why are you calling it "eigen values"?
but not eigen vecters
cuz i found eigen values to this matrix
and tehy are correct
these are the eigen vectors?
I didn't check


ya you already have the eigen vectors, then pick those as the basis
i.e. {-1+x, x^2, 1+3x+8x^2}
alternatively you can also use "change of basis formula"
but this doesnt give me the correct [T]b
,w eigen value decompose {{1, 1, 0}, {3, 3, 0}, {4, 4, 2}}


hahahaha

i am supposed to determine the closests points on two lines
then i am supposed to use the relationship that P1P2 is orthogonal to both lines
Think about projecting one line onto another
If we have two vectors, v and u and w = av+ cu where c and a are real numbers, is it correct to state the following: "The value of v = A^{-1}w where A is a matrix" and that A has values ((v_x, vy), (u_x, u_y))?
Unsure how to write a matrix here, but (v_x, v_y) is the first columb and (u_x, u_y) is the second
How can we find linearly independent vectors of a null space if we know the dimension and matrix representation of LT?
extend the basis of the column space into a basis of the vector space V of which the columnspace is a subspace
Okay
Then i have to check its image under T is zero vector of codomain space right?
@lavish jewel
mhm
Is this correct?

Im trying to solve this que
No
i just dont see how representing X^TX as Summation of x_i x_i ^T helps this proof

this is a stats question?
i thought its linear algebra

ok pasted there thanks
hey i need some help with this proof q- i'm ever so stuck/confused

can some one plz help me out here- where would i even begin?
anyone?
6.a.13 in Linear Algebra Done Right. Is this talking about a general inner product or is it the usual dot product?

The usual dot product
you have the identity
$[v]_C = P [v]_B, , P^{-1}[v]_C = [v]_B$
criver

Let $[w]_B = A [v]_B$ then $PA [v]_B = P [w]_B = [w]_C$
criver

I meant to write general inner product in R^2 vs usual dot product. How did you figure it was the usual dot product?
Because they didn't specify a specific one
You can prove it for a general one if you want
Pick two basis vectors f1,f2
umm we havent learnt dot product yett
let their coordinates be defined wrt the canonical basis (1,0), (0,1)
Then form the metric tensor g_ij = fi dot fj
Then form the inner product <u,v> = g_ij u^i v^j
Where u and v are defined wrt the basis f
You can prove the same thing there too
So where was I at with 1u1's proof
$[w]_B = A [v]_B \implies PA [v]_B = P [w]_B = [w]_C \ DP [v]_B = D [v]_C = [w]_C \implies PA = DP$
criver

Then multiply both sides on the right by P^{-1}
ooh ok that kind of makes sense but one question like how did you just come up with all of this like just by looking at it and how did you know oh let [w]b=A[v]b if you get me
also here is this a definition or something
I just picked an arbitrary element from V
cuz you changed T to v
And then I say w = T(v)
The above doesn't hold for arbitrary A and D, the key part is that A = [T]_B, D = [T]_C
It's the same map
So if we say w = T(v)
Then this should hold regardless of the basis in which w and v areexpressed
So
$[w]_C = [T]_C [v]_C$ and $[w]_B = [T]_B [v]_B$
criver

You could also pretend that you are not given [T]_C at all, but rather that you want to find it
Then you would do:
$P^{-1}[w]_C = [w]_B = [T]_B [v]_B = [T]_B P^{-1}[v]_C \implies [w]_C = P [T]_B P^{-1} [v]_C \implies [T]_C = P [T]_B P^{-1}$
To me this feels a tad less tautological
criver

this tex bot refuses newlines for some reason
lol ok that kindof makes more sense now just tryna get my head round it all fully
The middle equality in the first expression is by definition of T_B
The left and right ones are by definition of the change of basis matrix P
Then you just multiply by P from the left
you mean the one u did right at the beg the [v]_c=p[v]_b ?
oh woops realised u were onnabout this one
ohh omg okk uno what i think im seeing it now-its making wayyy more sense
like thank you ever ever so much i appreciate it a lot honestly 🙂
i just need to do more practice tho on this topic too to fully get the hang of it all
so i was struck yet again with an example against my intuition namely the decomposition of bilinear forms into symmetric and skew symmetric forms doesn't work in field of char=2 and i understand why but i have been seeing this char 2 field pattern much too often of things that simply work everywhere except there and my question is
why char 2 fields? is it just a coincidence? or am i missing something trivial about it
because 1 + 1 = 0 messes a lot of things up
having 2 not be equal to zero is pretty nice
maybe there's a deep number theoretic reason with it being the only even prime
i suppose that would make sense
i just find it interesting how much difference it makes
for your specific example, you could say that in characteristic two there's no difference between symmetry and skew symmetry
oh that makes more sense
i initially thought of how we usually prove it with $\frac{f(x,y)+f(y,x)}{2}+\frac{f(x,y)-f(y,x)}{2}$ where f is a bilinear form and realized we cant divide by 2 so it wont work tho now that im considering it it might not have been enough
James banash.

but taking in my mind they're the same any non symmetric form wont be decomposed into there sum as it would be symmetric
cool
ty
hello, just a quick quetsion, if dimension(kerT)=dimension(V), does it imply that kerT=V?
yes, it is to assume it is finite dimensional, thank you
also, another clarification, if V maps to W, W is a subset of V?
wdym V maps to W
like V is the pre image of the transformation, sorry I am only using terminology from textbook


why exactly do they define matrix vector multiplication like this? it seems like they just defined it as this random thing?
like why do they define Ax as T(x)?
V,W can be completely different spaces. one need not contain the other
okay, that is why i had confusion, thank you so much
For a linear map $T : V \implies W$, we want to find the image for a given x in V under T. If a finite basis for V is given, say $v_1,…,v_n$, we know any x in V can be represented as a LINEAR combination wrt to the basis. So x = $\sum_{k=1}^{n}a_kv_k$. Now T is LINEAR, so finding the image of x comes down to T(x) = T($\sum_{k=1}^{n}a_kv_k$) = $\sum_{k=1}^{n}a_kT(v_k)$. Amazing, all we need to know is see how T acts on the given basis to be able to find the image of x under T. So let $A = [T(v_1), …, T(v_n)]$ would be the matrix of T wrt to the given basis. So we just do define T(x) = Ax where Ax is defined as $\sum_{k=1}^{n}a_kT(v_k)$.
Plegasus

Now if V = F^n and W = F^m, we have an mxn matrix and the so called matrix vector multiplication is just a linear combination as stated above.
I can only echo what Pleg said here, but the idea is that this definition says that all of the information about a linear transformation is contained in the columns of its matrix representation, which tell you how the linear map acts on a basis.
This seems more natural than the "dot product of rows with columns" definition that is sometimes given anyway.
imo this is like one of the most important definitions in finite dimensional linear algebra.
also LADW very pog
i feel like it will probably seem less random as you go along
i’ll just accept it as it is for now
why do you still see it as random?

i mean, if you have an arbitrary function R --> R, if I tell you what f(1) is, you have zero clue how to determine what f(x) is for arbitrary x. But if f is linear, f(1) completely determines f.
i.e. a single number determines an entire function R --> R between uncountable sets.
It is because of bases and linearity that linear transformations can be represented by finite arrays of numbers (in the finite dim setting).
I suppose the definition is "random" in the sense that we have chosen to represent the matrix as columns where a_k = T(e_1) instead of rows, or diagonals, or other arbitrary means. But with this definition, you can recover the usual "dot product of rows with columns" computational trick that you can't do if you chose to define matrix multiplication some other way.
Ah that is what they meant by random.
i just don’t understand all this stuff very well yet
the big important part is that a linear transformation is determined by its action on a basis. The usefulness of that and the def of matrix multiplication will become more and more clear as you go along
I am having difficulty here, so, i am assuming i need to find that imT=0, but how would i do that?

why do u say imT={0}
still, why?
because it tells me to use the dimension theorem, so that means that the nullity would be n or that the rank is 0
if rank=0 then imT={0}. but recall how T is defined
by taking the transformation of p(x) if i am correct?
sum of coeffs of p
yes (u should show it), so its wrong to say imT={0}
so the dimension of the space itself must be n+1?
if i am correct here
what space
Pn
yes
ok, so that's where i am stuck, because i thought that it had a dimension of n which is why i was confused as to why i had dim(imT) of 1
but why would it be n+1?
find a basis of P_n. count it
look at a simpler case seb
take n=1 or 2 for example
i am having a monmet
isnt Pn= a_1+a_2x^1+...+anx^n-1?
if i am correct?
no
what am i missing here?
highest degree will be n
you're good
mistakes happen
im losthere, i know what is to be shown, but i dont even know how to start this proof

start by what it means for something to be in the null space of A
Yes*, the basic solution
how do you start a proof that one set is a subset of another?
If it can be written as a linear combination of another
no
there are multiple issues with that phrase, but what i was trying to appeal to is the basics of set theory
to prove A is a subset of B you prove that every element of A is also an element of B
If I'm in an algebraically closed field and M (square) is injective, is it true that M must be diagonizable?
i would imagine it would be since we do have (say n is the rank) n roots to the characteristic polynomial
preferably don't give me proof, I'm trying to figure it out myself, but I don't wanna go down a rabbit hole trying to prove something false
inb4 though

the answer is no
what you wanna read about is defective matrices and jordan normal form
oh man i think that might be over my head at this point 😅
Is there anything that can be said about the inverse of a block matrix of the form
$M = \begin{bmatrix} A_0 & A_1^T & \ldots & A_m^T \ A_1 & 0 & \ldots & 0 \ \ldots & \ldots & \ldots & \ldots \ A_m & 0 & \ldots & 0 \end{bmatrix}$
criver

More specifically about the first block row of the inverse
Where A0 is not full rank
if you assume the inverse exists and partition it into blocks of the same size as the A_i
hmm
consider a 3x3 block case first, for simplicity
$\begin{bmatrix} W_1 & W_2 & W_3 \
W_4 & W_5 & W_6 \
W_7 & W_8 & W_9 \end{bmatrix}
\begin{bmatrix} A_0 & A_1^T & A_2^T \
A_1 & 0 & 0 \
A_2 & 0 & 0 \end{bmatrix}
= \begin{bmatrix} I & 0 & 0 \
0 & I & 0 \
0 & 0 & I \end{bmatrix}$
Edd

then you get a couple of things that may or may not be useful
like W1A0 + W2A1 + W3A2 = I, W1A1^T = 0, W1A2^T = 0
Yes, I did that part, unfortunately A0, A1, ..., A_m are not invertible
do you know anything about the A_i? any symmetry?
A0 is symmetric, the others not necessarily
Yes, so it is a left inverse
if it can exist in the first place, yea
btw if A_i is not invertible, then M is not invertible
because you get linearly dependent columns
Let me try to process that
hmmm that's not what i mean, actually
What if the A_i are not even square?
what i mean is that A_i^T needs to have full column rank
and so the A_i have full row rank
except for A_0, all the other A_i^T need full column rank
Full column or row rank?
the A_i have full column rank yes, but not full row rank, I think there are 0 rows in the A_i if I didn't mess up something
How did you figure that out?
you just look at the matrix and go "oh"
all of the columns past the block containing A0 are the same columns of the A_i^T, except padded with zeros
Because you're looking out for 0 cols/rows?
Ok I think I got what you mean
and the columns here depend only on the columns of the A_i^T, because of the matrix structure
so if any A_i does not have full row rank, M is not invertible
Ok let's assume they have full row rank I guess
If they don't I guess I get a singular matrix, have to think through this
and you say A0 is symmetric, yeah?
Yes, in fact it is positive semi-definite and has only one 0 eigenvalue corresponding to the eigenvector 1^T
i.e. it loses the mean value of input vectors
ok
at the outpit it cannot differentiate between vectors differing only by a constant
Just to make sure, you mean full column rank of [A1^T, ..., Am^T] as a whole
Otherwise I would get linearly dependent columns
That is, at most [A1^T,...,Am^T] can be square, num rows >= num cols must hold
sure, but that also implies it for each one
Sure, my point was that for each one is a weaker cond
it's the same cond here
hmmm
i guess not
i guess this enforces some inequality between the number of blocks, the number of rows, and the number of columns
and then there's some interplay in the A0 part but I let's leave that part alone for now
these matrices have very few rows?
Ai^T have very few columns
A lot of rows
So rows >= cols always holds for them taken together
mhm
hmmm
yeah
well what i would do is consider a generic block inverse, call it W with blocks W_i
and WM = MW = I
and use both WM and MW to construct the blocks
many of the blocks should be pseudo inverses of the A_i
but something special should happen for the first block row and block column of W
just taking the pseudoinverse ought to work?
ought to work for what
as in:
whenever you have these expressions W4 A1^T = I and A1^T has full column rank, W4 is the pseudo inverse of A1^T from the left
that's the very definition, isn't it?
Amd the pseudo-inverse will exist as long as A1^T has full col rank
you can construct it by taking the SVD of the A_i^T
And similarly for right pseudo inverse and Ai
mhm
the other thing i'm sure you're considering is that this matrix is the form of an outer product
there should be some way to exploit that
No, I hadn't thought of that
you have a vector of block matrices, call it V
and your matrix M = VV^T
so i'm almost sure you can directly SVD the blocks of V to come up with something interesting
yeah, Ive worked only with uu^T, I am not sure how that generalizes
But I get what you mean
idk what exactly the better approach is off the top of my head, but i think this gives you something to play around with for a while
Yes, thank you. I'll look into the details. This helped a lot.
u doing data science or ML or something like that?
or maybe discretizing differential equations
Yes it is from a PDE, although the only part that arose from a discretisation of a pde is A0, the rest arise from Lagrange multiplier constraints.
I looked deeper into the inverses, but unfortunately the moore-penrose one would not satisfy the first equation, so it's quite nasty in the sense that L also enters the W1, W2 etc terms. They get mixed.

not linear algebra
not linear algebra though it's correct
( a + b )^2 = a^2 + b^2 + 2ab
( a - b )^2 = a^2 + b^2 - 2ab
( a * b )^2 = ( ab )^2
( a / b )^2 = ???

sqrt( a / b )^2 = sqrt(x)
a/b=sqrt(x)
(a+b)^2 = a^2 + b^2
no
yes
(a+b)^2
same as (a+b)(a+b)
distribute
a*a=a^2
its not linear algebra what
lmao
ab + ba = 2ab
get this rubbish out of here god damn
b*b=b^2
I think pre-school math is next door

dope
go away
ok
because that wouldn't make any progression
i want to know if (a/b)^2 can be simplified
yes it can be
so i sqrt both
a^2/b^2
so a/b=sqrt(x)
mby take this dms

what exactly does the book mean by this? like a complex number multiplied by a complex number?
idk i just don’t understand the question
wait maybe they mean T(x) = x(a+bi)
either way i wouldn’t mind further clarification just to be sure
this is exactly what the book means
Oh this is a very cool thing that has a great application in complex analysis.
moash

plz ping when u reply
well, first you have to define what matrix norm you're going to use
unless you mean entrywise absolute value?
Ummm what?
I mean the determinant
My question basically is
Is det(A^n)== (det(A))^n
oh the determinant?
yeah it is
det(AB) = det A * det B
your equality immediately follows from this more general fact
sorry, i know i sent this yesterday, but a day later, i still don't understand this

What direction do you want to do first
i really need help on how to start, because i can't evem figure out how to start this properly
colB subset of nullA
AB=0
Right. Do you recall that col B and range B are the same?
yes
So the way I'm thinking about it
Is that if I take a vector v, then Bv is in range B
But if it's in range B it's in col B
but if it's col B, then what?
then it is part of a set of linearly independent vectors?
then it is in nulla
if your in colB what other set are you in
yeah
And if Bv is in nullA, what is ABv=? for any v?
no
what does it mean to be in nullA
if a vector u is in nullA, then what does Au=?
=0
0
So it's true for any vector v that ABv=0, right?
If so, we say AB=0
see if you can get the other direction
with this question, i know we are trying to prove: f(x)=p(x+1)-p(x), but do i start with defining the transorfmation?

Hi, could somebody remind please. I have an eigen value of multiplicity 3, I have found one eigenvector. How do I find the rest?
I have this formula: A h_2 = lambda h_2 + h_1 but I don't understand why it's true
(where h_1 is the eigenvector I found, h_2 is the second one, lambda is the eigenvalue for h_1)
look up generalized eigenvectors
Thanks
how should i start learning linear algebra
mit has a full online course available for free with assignments ,videos and lecture notes tho you can always pick up a introductory level book and grind it out yourself

is this your typesetting?
so i know how to write what a linear transform from R to R would look like, just T(x) = ax, but idk what to do for a linear transform from R^2 to R^2
yeah
may i suggest writing $\overset{?}{=}$ instead of $=?=$
Ann

yeah i guess i’ll do that next time, it was temporary anyways
i know how to get the matrix for it, i was just trying to prove linearity
but idk how the function would look like exactly, if my wording makes any sense
like you know how a quadratic looks? i don’t know how this would look
Ann

$= (ax - by) + i(bx + ay)$
Ann

so i guess just write T(x,y)^T = (ax-by,bx+ay)^T?
since i can’t work with imaginary numbers in this case
sure you can
it's tantamount to just writing complex numbers directly in the basis {1,i} and not as coordinate columns
ok thanks
Hii guys

Can you explain me with this hint using 3x3 matrix

I dun understand how they got it
Ohhh
How do I do the sum rule
?
where can i find good practice problems of linear algebra
textbooks
like?
I like Hoffman Kunge

all of those matrices are in REF right?
none are in RREF
ping if u reply plz. ty
isn’t that like a really hard book
Look at the definition in your book/notes. However 2 of those are not in REF.
which ones...
they all seem to be in REF
zeros grouped at the bottom
leading entry is 1
and each leading one is to the right of the previous one
this is the def we have of REF in our book
As I stated before go to your notes for this. Or even google online for when a matrix is in REF.
It follows easily if you do.
yeah i was just checking .....
but which ones were u talking abt....
oh wait
nvm
You clearly said it here.
Yes.
It isn't. The right names are Hoffman and Kunze btw
Not linear algebra, try #prealg-and-algebra and google.
Thank you, sorry btw
can someone help me in arithmetic sequence?
question:
If i have a matrix, and i map that into its normal form (jordan form) is that continuously invertible?
question is to prove a set of matrices is dense in L(R), but to change eigenvalues/determinants its easier to switch to its normal form
by continuously invertible i mean a homeomorphism
dont know if this goes here but alas
can anyone please explain how we can do this problem .....

@wintry steppe yes
thanks :)
nvm
after hours of thinking what the hell i did wrong
and a few mental breakdowns
i realised i put 3 instead of -3 in the augmented matrix
linear algebra for me in a nutshell
i will respectfully go kms
peace y'all
Hi there
How can you find a matrix which satisfies a already given kernel
in particular

can anyone explain why this is false


Potato

It’s the set of all polynomials of degree n or lower over R
So like the set of polynomials in the form $\sum_{k=0}^n\alpha_k\cdot x^k$ where $\alpha_k\in\bR$

(And the alphas can be 0, so the polynomial doesn’t necessarily have to have a degree of n, it can be less than n)
ay slurp
Take the most simple case where the matrix is 0. So let’s say you want to solve
Ax = b
Where b isn’t 0, so you get
0x = b
0 = b
Which is a contradiction, so there is no solution
I see thanks !
And the RREF of 0 is just 0, so it obviously has a row of zeros, but no solutions (this not infinite solutions)
i see
it seems a bit contradictory tho
to what i saw in class
i was told if the last row is all zeros then the system has inf many solutions
This is false. It either has infinite or no solutions
In the case where it’s a homogeneous set of equations (so Ax=0) then no matter what it has infinite
i think they assumed the other rows are non zero
like
if the last row is zero
and the other rows are non zero
wouldn't this mean the system has inf many solutions
oh
yeah cuz the augmented matrix wouldn't be invertible
[ \begin{pmatrix} 1 & 0 \ 0 & 0 \end{pmatrix}\cdot x = \begin{pmatrix} 1\1\end{pmatrix} ]

ummm aren't we supposed to include the right side in the augmented matrix?.....
like this would actually be
[ \begin{pmatrix} 1 & 0 & 1\ 0 & 0 & 1\end{pmatrix}]
moash
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

Oh well if you’re referring to the augmented matrix as a whole, then yes, if a row has all 0s including the column to the right, then it does have infinite solutions
But
1 0 1
0 0 1
and therefore the last row would correspond to 0=1
and that's why it has no solutions
but if it were for ex
This is also false because you could have something like
0 0 | 1
0 0 | 0
oh
hmmmm
Yeah so sorry about above, I kinda just forgot what is meant by an augmented matrix 
np lol i have a midterm exam in 2 days and i barely know anything ❤️
oh lol
just saw an example of what u were saying in my prof's notes
interesting

Good luck!
can we find a general formula for the determinant of the inverse of a matrix A in terms of the determinant of matrix A?
$A^-1=(1/det(A)) adj(A)$
moash

det(A) = 1/det(A^-1).
$det(A^-1)=det(1/det(A))adj(A))$
moash
