
#linear-algebra
2 messages · Page 278 of 1
Does the range of a matrix mean the set of all vectors that can be made from multiplying M by a column vector v?
something like this, but for a specific 4x4?

yes
Would this be correct?

this

mostly. theres some bad notation
rangeM is the set of all those products as a,b,c,d vary over real values
$\brc{M(a,b,c,d)^T:a,b,c,d\in\bR}$
RokabeJintaro

i sorta just moved it to a different spot, this good?

no, it completely ignores what i said about notation
rangeM is the set of all those products as a,b,c,d vary over real values
rangeM is the set written above
is what i said about notation clear?
no i meant this guy posted a grabify link that doesn't even have the domain changed
its harmless
is it not an ip grabber?
ah yes i blanked. theyre banned
anyways i sorta rearranged it but idk if I need to change part of my equation to reflect the definition

no rangeM is a set not a vector. ur notation suggests its a vector
the braces must be there each step to denote a set
hmm i see

ye. just make the R boldface
these little ones that I just realized, or even the \mathbb{R}'s

make em mathbb
is there a reason to use bf over bb

i just use the classic \newcommand{\R}{\mathbb{R}} and forgot to type the \ in the previous pictures
mb by boldface i meant blackboard
omg thats what that means lol
ik cal is caligraphy but didn't know blackboard
makes sense
helo guyss
so where can I find that definition of rangeM because I dont see it in sheldon axlers book
could anyone help me with this ex

the set of f(x) for all x in the domain
so (by viewing matrices as linear maps) rangeM is the set of Mv for all vectors v
.
im slightly confused by the notation in the stated problem not being the transposed row

its common to swap between writing vectors as tuples & columns
then the matrix multiplication technically doesnt make sense
you could write it as a row vector but move it over to the left of the matrix
then the result would be a row vector and you wouldn't need your transposes
@wicked palm no
so does this have a problem

oops i see a glaring problem that I don't have M on my second line
no other than missing M
oh wait the M doesn't need to be there
because that was solved for
its {(a,b,a,b)...} not {(a,b,c,d)...}
why not? just transpose M and it works I think
taking M^T works but maps are usually enacted as left-multiplying matrices so no
the prof said my original 1 line equality was fine (the one with range not being a set). But Ive asked him if its supposed to be the transposes
since the question doesn't say the transposes
but Mv is a column so
tranposes shouldnt get in the way of understanding
a vector in R^n is precisely that whether its written as a row or column
well i definitely feel like i understand teh problem better now
cause i didn't think of it as a set before
even though I literally made it a set when it was a map lol


Would this be a valid solution
I solved for the plane then made random coefficients and vectors to equal it
I don't think that'd guarantee hold for other points
Hint: Find 3 points on the plane and 2 vectors on the plane
i am convinced that this is true but I dont know how to even begin to show it. if dim range T=1 then only one element is nonzero right? (i dont think thats right.) And if you do T(....nonzero....) you get an output thats a1v1 a2v2... anvn, but all but one a_i is zero so its just scaled by a_i? 

dimT doesn't make sense
Explain why Tv=cv_i for some scalar c and vector v_i in V.
dim range T = 1*
i suppose you moved the c into the transofrmation
T(Tv) = cTv
T(Tv) = T(cv)
implieis Tv = cv
T isn't injective
darnit ur right
Hint: $T[v]\in Im(T)$
Mosh

Whats Im
Image
T^{-1}?
Mosh

$Tv \in \operatorname{range}T = \operatorname{span}w = {aw : a \in \mathbf{R}}$
MattDog_222

yep
so that means there exists a in K (we don't know what scalar field V acts over) such that T[v]=aw
for the purpose of our class $\mathbb{F} \equiv \mathbb{C} \lor \mathbb{F} \equiv \mathbb{R}$
Ok, so you should still be using/saying F
MattDog_222

cause F is generic scalar field
ah yes i shall edit that
ie saying a in R is a loss of generality
but yeah, if dim(Im(T))=1, then there exists w in V such that Im(T)=span(w) since Im(T) is a subspace
(Ie, you just pick a basis for the image)
i've got to tie in my equation thingy here in a minute, but do I need to include its a subspace or is saying the basis contains one element, and we'll call it w etc etc

rangeT = span w*
should i use a different letter than a? c is reserved for the result/conclusion
maybe r or s?
i changed to alpha lol. "aw" didn't feel like a vector but αw does
is there a way to tag an equation in latex, basically the opposite of \notag
like put an (a) here or something

No clue, however I'd say something like $T[T[v]]=T[bw]$ cause alpha is playing the role of scalar in the definition
Mosh

or frankly you don't even need to explicitly say span(w) is that
idk i think it helps with clarity. but ye i'll either use alpha beta c or a b c
how do you know if something is onto and when something is one to one
if the image of the domain is the codomain and if f(x) = f(y) => x = y respectively
Tw is also in w right, so do I said (beta gamma w_2) or somethiing

What is W?

$W=\operatorname{span}\left{\begin{pmatrix}
1\
0\
-2
\end{pmatrix}
,;\begin{pmatrix}
0\
3\
6
\end{pmatrix},;\begin{pmatrix}
-4\
2\
3
\end{pmatrix}\right}$
MattDog_222

sorry to @ but is this proper now. and should i handle the c \equiv gamma how I did, I shouldn't have c in the \align right?

I mean it looks fine
You've shown there's a scalar in F st T^2=cT
Doesn't matter what the scalar name is
oops I just realized I brushed Tw = aw under the rug
i think ima make a (4.11) that says Tw \in span w
@nocturne jewel


You're being redundant now
Once you said Im(T)=span w once, you don't need to again
ok
Since Im is that, there exists a and b st Tv=aw and Tw=bw
and did i need to define v\inV?
Well duh
(oops i forgot xD)
You need to define anything you use
Fix v in V.
Then define w when you say Im is span
Then define a and b when you comment on Tv and Tw
u mean like comment a and b (beta gamma) here?

No
Personal opinion: Define what you will use in a computation in a systematic logical manner
Do the computation
Conclude
define a like this? Sorry i'm confused on the fine details

did my proof just fall apart D:

No..
Like what I said
There exists a and b in F st Tv=aw and Tw=bw
Then T^2v=T(aw)=abw=b(aw)=bTv
oh i see so the proof survives 😅
Cause you currently have random scalars appearing, which reads poorly imo
agreed
broooooo who knows how to do grade 8 math i ahve been stuck on this question forever. I need to find a formula for this

what the heck
this isnt linear algebra
my fault sry
use a regular help-xx chanel
Not even a linear relationship
MY FUALT
bro thank u so much my friends and I were struggling
n = # of flavors. not sure why you're supposed to know that formula in 8th grade lol. but i digress
can you do LDU decomposition if there's a diagonal entry that will equal zero
can you use linear in partial fraction decomp to find the coefficients ?
Im confused what this is saying sorta


like do I not wrote the x x^2 x^3 in the basis and instead 1 1 1 1 = 1 2 3 and given the ordered basis 1, x, x² it equals (1, 2x, 3x²)? feels fuzzy
thats not exactly how bases work here
the vector in R that corresponds to the polynomial 1 + x + x^2 + x^3 is the vector [1, 1, 1, 1]
in general, a + bx + cx^2 + dx^3 is representtd by [a, b, c, d]
not [a, bx, cx^2, dx^3] (this isnt even a single vector in R!)
so your multiplication should look like

and [1, 2, 3] as an R^3 vector corresponds to the P_2(R) vector 1 + 2x + 3x^2 as expected.
does that make sense? @hardy inlet
this?

sure?
thats not exactly the computation you had before but yeah thats correct
well idk what the part in red means
"for"?
the ordered basis
1, x, x²
$(1,1,1,1)$ of $x^0, x^1, x^2, x^3$ goes to $(1,2,3)$ of $x^0, x^1, x^2$
MattDog_222

if you sum up the derivatives of 1, x, x^2, and x^3, you get 1 + 2x + 3x^2
thats what you did, you just wrote these in a different representation
as vectors of coefficients rather than as polynomials
right, thats the ideaa
so basically i gotta reverse engineer this transformation matrix

and i wanted to try and understand how given a basis u get to the matrix
so I can undo it

what did u do
do u know how to row reduce a matrix*
yeah but like this scalar part
is confusing me
can you provide me the answer
because i have 8 mins
do u know RREF
yeah
make ur columns ur variables, augmented with the nonhomogeneous set of solutions
but can you explain after giving me the answer real quick just cuz of times sake
Sounds like a quiz/test to me
why'd u wait till the last second to start it
you essentially have 3 equations and 2 variables to solve for


I got it thanks
👍
take it as a lesson to not procrastinate :P
overstresses you and you dont learn as much and it makes the assignment harder
critical thinking skills go ⬇️ when the brains under stress

im trying to think if P_3(R) makes sense or if it should be the reciprocals
Not sure, still runs under the previous assumptions

this feels like slop. looking for input

ohh I had the exact problem last semester in a test
i think its fine. All you really have to do in a solution is present the bases, and show that the matrix representation for differentiation has the form you want
i think the better way is this

i think this (this post) is a much better result than #5 (hyperlink)

looks ok, but you chose the P_4(R) basis before writing the outputs of the transformation
so you should swap the middle part with the first part
nope nvm, it's too early for me and my head is fried
i redid 5 with a similar thing, but had to do some slop with preimages still

looks good
i just wonder when it says two new bases, does it want you to do the same again but fixing a basis for p3 first this time
i mean example 3.34 had a different basis so i think im fine; but yeah i'll try and remember to ask the teacher
i did this backwards
I think its wrong

or maybe i messed up the numbers in the example
hmm?
if i have 75x² how do i put that in the transformation matrix, as 150 or 37.5
37.5 seems right
well then thats not the derivative
so idk if i defined it wrong or I am not putting the value in correctly
which example are you working with?
6x^3 + 75x^2 + 4x + pi
also i added an extra row of zeroes on accident there, its only 3 rows tall
and im falling asleep lol
what you can do to double check is put your basis as columns of a matrix
and multiply that by a vector with the coordinates in that basis
the result should be in the canonical basis
this allows you to double check whether you are expressing the vector correctly in the new basis
words
in this case, for example, x^2/2 is the basis element and 150 is its coordinate
and their product is 75x^2, which is the original vector in the canonical basis
so that checks out

which makes sense sorta. its a little bass ackwards but
$A(1,1,1,1) = A(x + 1 \cdot \frac{x^2}{2} + 1\cdot \frac{x^3}{3} + 1 \cdot \pi) = \frac{d}{dx}(x + 1 \cdot \frac{x^2}{2} + 1\cdot \frac{x^3}{3} + 1 \cdot \pi) = 1 + x + x²$ true
MattDog_222

if it helps you, this is the same as letting the matrix D act on the canonical basis, but first doing a permutation and scaling (the one i mentioned earlier). this can be interpreted either as a new transformation acting on the canonical basis, which should be the original matrix for differentiation, or a new transformation that acts on the new basis. under an appropriate change of basis, they should be equivalent
so something like DB^-1


Ohh

why did you think it was LD?
I thought since there is a free variable
It’s LD
I’ve never dealt with R4 3 vectors before
wait hold on
where did this matrix even come from in the first place
i think you may have been checking linear independence for the wrong set of vectors
I row reduced the matrix I made of the Vs
I did
1 2 -1 1 | 0
2 3 4 0 | 0
-1 -1 2 1 | 0
And then row reduced
To what I got
I just didn’t show my steps
But like I solved it plenty of different times
hold on tho
Idk if I’m just tired or not getting it
that sounds to me like you were checking the set { (1,2,-1), (2,3,-1), (-1,4,2), (1,0,1) } for linear independence.
hence why you have four variables... why would there be four coefficients when your set only has three vectors in it


if you were really using the definition of LD as you were instructed, you would start with the vector equation: $$x_1 \bd{v}_1 + x_2 \bd{v}_2 + x_3 \bd{v}_3 = \bd{0}$$
Ann

and then if you were to write this out componentwise,
you would get 4 equations in 3 variables
not 3 equations in 4 variables
What
I’m confused
How do I do that
How do you get 4 equations
Oh
4 equations
Got it
you don't need to post the same image over and over again.
It’s by accident
I’m trying to post something else
Phone is glitching
Oh I’m an idiot
I see what I did wrong now
;-;;
Welp I guess that’s why it’s important to write it out as a linear combination

God bless @dusky epoch

have you already done part b
so you have found the matrix of T?


i see no mention of the standard matrix of T
what is up with $\bmqty{1&2\1&-1}\bmqty{2&1\-1&1}$? what is that about?
Ann

I thought that’s how you do it
I thought the standard matrix
2 1
-1 1
And then for
2x+7
-x+y
I took the coefficients
And then multiplied those
I thought that’s how you do it
does anyone know how to do integration in disguise
im so confused on the highlighted section

yes that's the standard matrix of T
what's with that other matrix tho
by which you're multiplying it
$\cosh{x} = \frac{e^x + e^{-x}}{2}$
[TEB] darthlothins

I believe it should be fine to understand after this simplification
Also I would say the problem belongs to #odes-and-pdes
@peak plinth so you have never used matrices to evaluate a linear map at a point?
also you chose not to explicitly write out "[T] = ..." even though you will need it for part c
Basically
Long story short, my midterm is tomorrow
Linear mapping is apart of chapter 3
I kinda crammed chapter 3
Thank you bestie!
is this talking abouit integration by factor?

yea
Hi, guys, why if cx+dy+e=0, for some x,y, then M is not invertible? where A is 2-by-2 matrix and B is 2-by-1 matrix.

Yes
let me think
if A is 2x2 and invertible, then B is a linear combination of the columns of A. let's call the scalars x and y, so that A[x;y] = B
if for this x and y we also have that cx + dy + e = 0, then the third column as a whole is in the span of the first 2
(i think i messed up the signs)
i think i meant A[x;y] + B = 0
then the columns are linearly dependent. i made a lot of assumptions there though. are you given any other info?
Oh, thank you
I just saw on Reid's book, if cx+dy+e=0, then the projective transformation is not well-defined, i was guessing the matrix M may not be invertible, since somehow collinear exists or something

that seems unrelated
you're dividing by this term
or are you? what is this notation

Yes,division I think
then it's just looking to avoid division by 0
Yes,I am assuming the reason is that if so,then the matrix M will not be invertible
no, if the term is 0, you're dividing by 0
it's telling you the transformation is undefined
nothing about M
The transformation which will not be defined refers to the transformation defined by M not the division one
it says T there explicitly
it's talking about the transformation
and well, in homogeneous coordinates, which this is using for the projective space, M applies the same transformation as T
you can have M be invertible and T still be undefined
this is because in T, (cx + dy + e) has a division by 0
in the case of M, the matrix acts on vectors in homogeneous coordinates of the form [x,y,1], yes?
Yes
and this transforms into [u,v, cx + dy + e]
Yeah
and because we are in homog. coords, we divide by cx + dy + e so that the third element is equal to 1, since we're projecting on a 2D plane
when you do this division, you again divide by 0
just like in T
the problem is not M being rank deficient, it is the division by 0
so B is 1×1 
B is 2 x 1
oh ye mb
anyway, this has nothing to do with M not being invertible
this represents a point at infinity, to be fair
that's part of the point of using projective coords
im not sure if thius is the right channel but
i have a set of points
and i need to find the center of them

for example, how can i get the center of all of these points
find the average of the x coordinates and the average of the y coordinates
then?
that's it
unless you have some other definition of centre of course
yup, then my method is right


do you know what an orthonormal system is
yea an orthonormal system is one wherethe dot product is 0 if and only if what ur dotting isnt equal to each other
no, that's just orthogonal (albeit somewhat butchered still)
an orthogonal system is a set of vectors which are orthogonal to each other
ah ok ok
an orthonormal system is an orthogonal system where each vector also has length 1
are you having trouble checking your {u1, u2} against this definition?
yea :/
which part are you having trouble with?
so i guess first i should show u1 and u2 have a magnitude of 1
which is done by showing
ok sure
ok so i did that
so then
we should dot them to see the dot product i assume
so i think we could do u1^T u2?
sure, that works
the what is orthogonal? just for clarity
so now i guess my second question is what is Big U here?
u1, u2
{u1, u2} is an orthonormal system
ok
since u1 and u2 are orthogonal and each has a magnitude of 1
now going back to this im not sure what capital U is here
they really don't mention it, but my best guess is that it's the matrix U = [u1 u2]
ok so
what does I_2 mean?
i know I is the identity matrix
but what does the sub 2 mean?
identity mat of size 2x2
Free vector dot product calculator - Find vector dot product step-by-step
yes
i just used symbolab real quick
but it seems to be I_2
i think you can benefit from thinking a bit about how you could have done the calculation quickly without a calculator
yea ill think about it
P_u is actually more interesting tho
its alternating 1/2 and 0
also another thing im wondering is
how can Q_U = I_2 - P_U
they're different dimensions
notice that $U^T U = \begin{bmatrix} u_1^T \ u_2^T \end{bmatrix} \begin{bmatrix} u_1 & u_2 \end{bmatrix} = \begin{bmatrix} u_1^T u_1 && u_1^T u_2 \ u_2^T u_1 && u_2^T u_2 \end{bmatrix}$
Edd

oh true ur right
since we know that
U_1TU_2 is 0
bc theyre orthogonal that makes sense
and U_1TU_1 makes sense bc its
4 * 1/4
and same with U_2TU2
yep
that makes a lot of sense actually
it's like "define"
cool tysm
so i got Q_u then ill verify that thats actually a mistake tho
it must be
more or less like "this is important for some reason, so let's give it a short and sweet name"
yea
so in terms of finding the closest point, i have no idea how to do that
yes its 4 x 4 i got alternating 1/2 0
the important thing here would be to notice what UU^T means
have you seen orthogonal projections?
its basically saying the range and the kernel are orthogonal right?
yes the quantity Q_U
i guess im having trouble seeing where this is coming together
if i had to guess, id say the 0 vector would work
but im not sure thats right
oops
yes
the kernel then has dim 2
yea
anyway, UU^T does an orthogonal projection onto the span of U
so this allows you to compute the shortest distance & closest point
r u saying then that the orthogonal projection is the closest point?
yep. i encourage you to either read or show why
but the thing is
the point that we have is a 4 x 1 vector
and our orthogonal projection UU^T is 4 x 4
dont the dimensions have to match?
they do?
i thought so but i might be wrong
ohhh
you apply the orthogonal projection to a vector
or find the orthogonal projection of the vector onto the span of {u1, u2}
however you wanna call it
ah ok ok so
i got 3/2 2 3/2 2
that makes more sense
ill watch a video about this tho
what happened was
i took linear over the summer in an accelerated class at a cc, but it was very surface level and problems were super easy (generic pearson)
now that im taking an advanced math elective building on this stuff
since i didnt have a good foundation
im struggling a lot rn
hence why the seemingly dumb q's haha
sorry about that, but thanks for ur patience and help, i appreciate it a lot
since you already have some familiarity, then 3b1b's videos might help
i also like gilbert strang's vids
yea some people have recommended that channel, ill take a look, thanks!
anyone remember if (logx)^2 =. logx^2
it doesn't. try #prealg-and-algebra
a vector space is just a set of elements, that we call vectors, that is closed under scalar multiplication and addition right
the addition and multiplication also need to be "nice"

oh associativity commutativity identity inverses
indeed
ABELIAN VECTORS GRAPES
ok just wanted to double check without googling
now onto differentiable manifolds 
right, abelian group under addition. but yeah, you can wiki any further details
yeah TIL wikipedia is a really good resource when you dont have a textbook
hmmm
non euclidean vector spaces
i wonder
wait would a differentiable manifold be a non euclidean vector space
im making so many black box assumptions rn 
Vector spaces have operations that act how you expect them to act 
ive realized that the further along you go in math, that becomes too much too expect lol
Yep
mosh you know any topology?
Not really
Anyone available? I've got a question.
Hi, I'm taking linear algebra this semester and I'm already lost on the first week. can you guys recommend any good YouTube channels to help? thanx!

YouTube
Lecture videos from Gilbert Strang's course on Linear Algebra at MIT.
I am not sure this fits the channel, but I couldn't find a constrained mathematical optimisation channel, so I thought this fits best here.
I have a very simple problem: $\min_x v^T x$ under the constraints: $1^Tx = L, , x_i \in [0,1]$. That's a linear programming problem.
criver

I was wondering whether there's a good way to find a solution analytically, or should I just resort to an interior point method or something of the sort.
do i need to know calc to learn linear algebra
its largely unneeded
material wise the most u need is mastery of high school algebra & geometry intuition
analytically?
Hey guys can anyone look at my question on linear algebra

sorry does this require Gaussian elimination

Gaussian elimination is one systematic way to go about it, but you can also just wing it if you prefer.
also not sure where to take this anymore

c = 2 seems to give infinite solutions
and c = -2 gives no solutions?
nvm im stupid
I can not understand how this problem is proved (there was no answer in the book). Problem - let k be the smallest of numbers that det(F-r*I)!=0 for all r>k, then there exists c independent of r that norm (F-rI)^-1 <=c for r>k
did u mean like using Lagrange multipliers and Kunn-Tucker? think we'll end up with the same thing at the end 
can you show the problem?
I do not understand how to estimate the inverse matrix norm
the first condition is equivalent to saying that the spectral radius is atmost k
field ℂ would have been easier to work with but anyway
you can assert that all real eigen values are less than k from the given condition
(absolute value)
actually this is not true if we are only taking real r's
the book dealt with matrices in the complex field
but you said r>k
this would also be my suggestion, kkt
ye but we end up with the same problem anyway?
like it's a harder problem now 
simplex is way easier compared to kkt
more variables cuz of slack?
does simplex work with ineq constraints? i dont remember
r integer, is used for the Taylor series
also it's iterative
after adding slacks or surplus
(honestly I don't ever want to see kkt )
lol
specially when you have to solve by hand 
Is this kind of proof okay? If we take a spectral norm, then the inverse matrix is bounded and the norm depends only on k, but all norms in linear space are equivalent to a constant, so the inequality is satisfied for any norm

looks like Bessel inequality
Heyy guys
Is linear transform is like you turn a straight road into a perspective view ?
No, that is a projective transformation, which is more general.

How did they go from the last line of the first page to that last line of the new page ?
it's already done in the previous page
they say (C^k)_p = the sum in sigma notation = the sum not in sigma notation
then you extend the same expression over all the indices p
this gets rid of the subindex p and replaces the scalar a_pj by the vector A^j
I've been trying to wrap my head around this, but i'm struggling. can someone explain it to me please?

the list $u_1, u_2$ is linearly independent iff $u_1$ isn't a scalar multiple of $u_2$ and vice versa.
Ann

I was a bit imprecise with my question
I understand that
but I don't know intuitively why it's true
say your vectors are $v_1$ and $v_2$, then they are linearly independen by definition iff there exist $\lambda_1$, $\lambda_2$ not both zero such that
$$\lambda_1v_1 + \lambda_2v_2 = 0$$
now we can say that $\lambda_1 \neq 0$, so we can divide by it and get
$$v_1 + \frac{\lambda_2}{\lambda_1}v_2 = 0$$
or
$$v_1 = - \frac{\lambda_2}{\lambda_1}v_2$$
i.e. $v_2$ is a scalar multiple of $v_1$

yes, i am trying to see it
Lochverstärker

but i dont know if this is 'intuitive', whatever that means
i think the intuitive reason is that the span of a single vector contains all its scalar multiples
oh
geometrically, the span of a single vector is a line
or a set of rays
and as loch wrote, in the case of 2 linearly dependent vectors, this means v1 is one of these rays (or v2, depending which vector you take the span of)
did you mean to write linearly dependant?
lol
No, I didn't mean KKT since I tried that already. I guess there's no simple way to get a solution.
simpler than simplex 
interior point is simpler than simplex, but I'll probably just hack around something because the problem is not that simple
As in the linear problem is a subproblem of a linearized problem. I'll probably just do projected gradient descent.
I figured out a simple algorithm that seems to work. But this channel is probably not appropriate for this.
hey um i need some help on this question part e)

ik its not a linear map but its not working when i show it
like this is what ive tried im guessing its wrong

cuz it shows it is- can some one help me out here on what i need to do/how to do it?
why would it not be linear? It's linear in the coefficients
part e i mean i tested it out in a graph and yh i dont think its a lin map ngl
The 1, x, x^2 are the monomial basis functions
yepp
but the showing of it isnt working
i did that here at the bottom
but it gave me the same thing
T(a * (a0+a1 * x + a2 * x^2)) = (a0 * a + 1) + ... != a * T(a0 + a1x + a2 x^2)
Because you'll have 1s on the rhs
And you'll have +a on the rhs
You wrote it wrong in your example
your using a as s.m and coefficient of polynomial bit hard to differentiate between them
$T(\alpha a_0) = \alpha a_0 + 1 \ne \alpha a_0 + \alpha = \alpha T (a_0), , \alpha \ne 1$
i would argue it's easier to see with addition
criver

hmmm but the second bit im wondering why cant u just factor out th alpha?
I can it's alpha * (a0 + 1)
you could if you wanted, but that would give $\alpha(a_0 + 1)$
Edd

Which is not the same as alpha * a0 + 1 unless alpha = 1
hmm ohh
try doing it with addition
Easiest way to check whether it's affine is to see whether it leaves the 0 element in place. If it doesn't and the rest is linear after then affine.
you'll reach something like 2 = 1
hmm i swear i tried that but i thought i could split up the 2 into 1+1 if ugm?
like what i did in my working above??
no, that doesn't make sense here
you'll get something of the form $a_0 + b_0 + 2 \neq a_0 + b_0 + 1$
Edd

ooh okk lemme try that then
those correspond to $T(a_0) + T(b_0) \neq T(a_0 + b_0)$
Edd

and one counterexample suffices
Also note T(0) != 0
this one is a dead giveaway, yeah
It's one of the easiest necessary conditions to check
Even for nonlinear nonaffine stuff
Also when checking for subspaces, it's the first thing you should check
ok so would it look something like this

aah okk yhh
what you wrote IS equal to T(u) + T(v)
Be careful that in the T(0)!=0 test, the 0 on the lhs is from V, while on the rhs it is from W, where T:V->W, but in your case V=W so it's trivial
hmmm oooh okk lemme try that
i get the impression you're not understanding why you're doing this
yeah not fully and idk how to do t(u+v) then?
i mean i wached a load of vids and read alot into itt but yh
Edd

and now if it helps you, let $p_i = (a_i + b_i)$
Edd

since you already know how to transform that
hmm so it would be T(p0+p1x+p2x^2)= (p0+1)+(p1+1)x+(p2+1)x^2
(a0+b0+1)+(a1+b1+1)x+(a2+b2+1)x^2
right
now compare to this
and you notice they are not equivalent
aaah okk yhh i see it now
this means that T(u) + T(v) \neq T(u + v)
okk yh i get that
makes alot more sense- thank you so much
i think i definitely need more practice with this tho lol
although in some cases one requires some clever tricks, the main idea is the same
you are given a definition
and you want to check if some object satisfies this definition
and here the definition at hand is that of linearity
so you just calmly check the properties one by one
how exactly you do this may vary
I highly recommend Halmos' problem solved book. There's no better way to learn to solve problems than by solving a lot of well chosen problems.
yhh tbh i didn't know exactly how to like the proper way so i was getting myself more confused and over complicating it lol -esp for these polynomials 1
thanks yhh ill check it out
He has solutions and hints at the end
So you can't get stuck, though I'd recommend trying to solve the problems yourself before looking at the solutions
this one right?

Yes
ooh okk yh ill check it out thanks
As you can see the linearity definition is on the cover 😛
loll yepp i didnt even realise till u mentioned
Hii guys
I forgot the formula or theorem which help you quickly to find determinant

Example we have this
Then we can take 3rd column and make it into 3×3 matrix
my recommendation would be to use minors here, the last column looks easy
I see
How does one find a proof strategy for anything
Im trying to do the exercises in axler
and its just pain
When you go to prove something, what is the thought process?
everything seems so unmotivated and out of nowhere
Write down the definitions of the relevant concepts, and try juggling them into the final form you need. If you can’t do that, why? What piece of information are you missing? Think about various pieces of facts and theorems you know and what that tells you about the definitions, and keep trying stuff until you successfully get it where you want it. Also, almost every result in linear algebra can be found by just drawing a picture of arrows, so I strongly recommend that. For example, inner product will be the product of the distance of one vector say a and the distance of say vector b parallel to a.
The generalization of inner product to n-dimensions is motivated by considering law of cosines
Well im doing linear algebra purely abstractly, but I never even thought of writing down definitions and theorems and seeing how they can mesh. I'll try that when Im next bothered to open it lol. thanks 🙂
Oh the abstraction is absolutely beautiful, because then it applies to so many things. The arrows are mostly just a good way to hunt for results that are true for vectors and guess theorems that you can then set about proving. They’re a lot less obviously true for more abstract vectors than these arrows, which is why they’re so effective for this.
is there a pure LA proof of the fact that any 3x3 real matrix with positive entries has a positive eigen value
if I have $$T(x,y,z) = (y, z-y, -x-y-2z)$$ and I want to find $$[T]^E_E$$
is it just the columns of the standard base E?
so for eample T(1, 0, 0) = 0, 0, -1 => the first column is 0, 0, -1?
blackmamba[they/them]

Does det[A-I\lambda] = 0 always result in a cubic polynomial with real roots?
If yes then it's probably related to how the cubic roots discriminant looks like

In algebra, a cubic equation in one variable is an equation of the form
a
x
3
+
b
x
2
+
c
x
+
d
=
0
{\displayst...
anyone?
no I'm asking why it should have a positive eigen value, not just a real one
otherwise it's obvious
is it actually true?
yes
there are proof which are not LA based, I was just wondering about a purely LA proof
Yes
what about eigenvalue = 0?
at least one positive, so if one ev is 0, there should be other +ve eigen value
ah
I thought you said it's only positives
did I?
ok I'm writing it formally, Let $A$ be a $3\times 3$ matrix with \textbf{positive real entries}, then it has \textbf{a real positive eigen value}.


hmm
before working hard though, is it similar to a simple 3x3 matrix? having only positive values
similar matrices have the same determinant
same eigenvalues
define simple
guys are the eigenvalues of A and A^T the same?
$A=Q\Lambda Q^{-1}, , A^T = Q^{-T} \Lambda Q^T$
criver

so yes they should be the same
if A is non-square then you need to look at
A^TA and AA^T
${}^{-T}$ should be an valid operator

such Q may not exist
you can use the char polynomial
p(x) = det(xI-A) = det(xI-A^T)
Why would that equality hold?
I mean, I know that it does
Even if I consider det(A)=det(A^T)
Yeah, but the characteristic polynomial is defined by det(xI-A) right?
yes
so why would they have the same characteristic polynomial?(I know they do, but why?)
.
yeah but that's circular
det( (xI-A)^T) = det(xI^T-A^T) = det(xI-A^T)
why is that equal to det(xI-A)? Transpose has no effect on determinant basically?
det(Q) = det(Q^T)
yes
spray some water on whatever you are reading
good idea thanks
Shifrin, but it includes calc and analytical geometry
Generally most things that are analytical geometry + linear algebra, or physics + linear algebra, or some engineering stuff have applications of the theory so it is typically more accessible
I have a misunderstanding and it keeps driving me crazy:
say I have this matrix and base B is
shouldn't C_i in base C be the matrix multiplied by B_i?

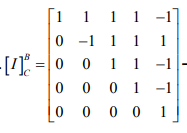
So $$ C_i = [I]^B_C * B_i$$
blackmamba[they/them]

or am I imagining?
Changing the basis for matrices requires a sandwich product by the change of basis matrix and its inverse
well yeah that's one way
but why can't I calculate this by hand also?
Isn't the point of the change of basis matrix to change... the base?
So if I multiply by B_1 =[1, 1, 1, 0, -1] it should give me C's representation of B1 right?
Idk what Cs representation of B means here, but I know that you need a sandwich product
no way this is unsolveable w/o sandwich product
representation of vector B_1 in base C
Say you have a matrix B with coordinates wrt some basis f1,...,fn
Now say you're given a vector with coordinates wrt some basis e1,...,en
Then to compute the action of B on this vector
You need to transform from es coordinates to fs coordinates
Let this be achieved through P
So B * P * v, but now this vector is with coords wrt f
And you want it wrt e
So you add
P^{-1} * B * P * v
honestly, I am not sure what you're saying lol
I'm trying to find base C
Has a coordinate representation that depends on the basis
it's the same for matrices
but B_i is a base so its representation/coordinates is just 0s expect 1 at the i
$B_e = T_{f\rightarrow e} B_f F_{e\rightarrow f}, , T_{f\rightarrow e} = F_{e\rightarrow f}^{-1}$
criver

Idk what is unclear, maybe someone else can help
$$[b_1]_C = [1, 0, 0, 0, 0] => b_1 = 1c_1 + 0c_2....$$
blackmamba[they/them]

B is written here
C is unknown
its a base
Is B_i the i-th vector
yes
A basis?
yeah.
So they are linearly independent and there are n of those, where n is their dimensionality
What is I^B_C
well it's a private case of the transformation matrix
So it's just some matrix
And C_i = I^B_C * B_i
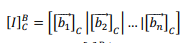
so each column is made of the vectors B_i with coordinates wrt C
https://i.imgur.com/6FnBmF7.png
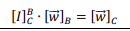
for every v
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Yes that is correct
yes, that is the definition of this symbol
so why can't I do this
What is C_i there?
Or rather what do you expect it to be
B_i is I assume the coordinates of b_i wrt the canonical basis
each v = a1b1 + a2b2.... anbn for the basis B and some a's from the field,
if v is b_i then its coordinates is just 0's except in i where it's 1
right?
v wrt which basis
b_i in the basis of b is e_i
yeah
yes
so
can I take my matrix
multiply it by standard
and get the representation in C
of b_i
actually that is what I'm doing
Can you take which matrix? What do you mean multiply it by standard? And what representation of C are we talking about?
C is unknown
B is a base
the matrix is the [I] I wrote
[b_1]_c = [1, 0, 0, 0, 0] => b1 = c1
B is a collection of basis vectors with coordinates wrt the canonical basis, correct?
that I've written
Yes, but the coordinates of the basis vectors are expressed wrt the canonical basis
Is that correct?
So wrt what basis are the coordinates of B's basis vectors you listed
what do you mean
If i write [1 2 3] and say that's vector v, I am in fact saying that these are v's coordinates wrt some basis. Usually the canonical one. So is this the case for the B_i.
you're not making any sense to me
I have a basis B
a transformation matrix / change of basis from B to C
and I want to find C
the main characteristic of the transformation matrix here is that multiply a vector in the vector field, represented in base B, is equal to that same vector in base C
Is it true that $B_i = [\vec{b_i}]_e$
criver

?
If I write v=[1 3 5] it's usually implied that this is v_e if a basis is not specified
These are coordinates
They are wrt something
They are coordinate reprrsentations of vectors
B is a basis, it what forms the coordinates
no, they're just vectors
they're vectors which span R^5
these coordinates are expressed wrt some basis. I am assuming the canonical basis
they're not coordinates
what is the canonical basis?
1, 0, 0, 0, 0...
0, 1, 0, 0, 0...
Yes
that's thecanonical basis
Yes
And when you write