#linear-algebra
2 messages · Page 244 of 1
You can talk about monoidal categories
Which are categories endowed with a certain product, which we usually call a tensor product.
ah is that the generalised concept
And it satisfies properties which are analogous to associativity and having a unity element
no, yeah
that's exactly what i mean
wrt. groups the identity is the trivial group
Vector spaces endowed with its usual tensor product are a monoidal category, in fact a symmetric monoidal category
and you can show associativity up to isomorphism
Sets endowed with Cartesian product too
The category of monoids endowed with direct sum is also a monoidal category
There are tons of examples
no but we speak of Grp
Yeah, Grp would be the category of groups
what about just finite groups
category of groups with group homos as homos
i feel like you could definitely have a set of all finite groups
It is not a set, it is a category tho
why is it not a set
all the elements are of finite order, how can you get any paradoxes
surely no recursion
kai, distinguish class vs set
russell
there can't be russell for the set of finite groups
surely
the set of finite groups is infinite
but all of its elements are finite
so it cannot possibly be in itself
or anything like that
there are assumptions in category theory that aren't really like
the same
when you try to fit the metaphor of sets and classes
https://youtu.be/JOp7mH72Jlg
you can try this

This lecture is part of an online course on Category theory
This is the introductory lecture, where we give a few examples of categories and define them.
The lectures were originally part of a graduate algebra course, and give a quick overview of the basic category theory that is useful in algebra.
Recommended textbook: "Categories for the wo...
Alright
can any of you say with 98% certainty that you could literally sit down and, in the specific case of defining a set of all finite groups, point to a contradiction
if you insist on calling it a set then yes it will result in problems
i know what russell's paradox is, btw
and you also can't have a set of all sets bc the cardinality would be greater than the cardinality bc like 2^C < C and 2^C < C, using the power set
how do we extend that
yeah, i'm solving it with solution 1
bounding the size of the objects
Consider the proper class $\mathcal{U}$ of all sets. Consider the subclass:
$$
\text{Fin} := {S \in \mathcal{U} , \vert , \text{S is finite} }
$$
We will prove $\text{Fin}$ is a proper class. Indeed, suppose $\text{Fin}$ is a set, then for any $A \in \mathcal{U}$, we have that ${A}$ is a finite set, i.e ${A} \in \text{Fin}$. So if $\text{Fin}$ was a set, we would have that the union:
$$
\mathcal{C} = \bigcup {A} \subset \text{Fin}
$$
Is also a set, but $\bigcup{A} = \mathcal{U}$ is a proper class, a contradiction ; $\square$
God damnit
MisterSystem

Wdym?
like
the constraint that the elements are finite order isn't sufficient
since the elements of the elements can be infinite
so the elements can contain the entire thing
no i think this is valid
But yeah, the problem is that if we take any set
it makes sense, whenever you have recursion you can get wild
ok
But you see, we have to be careful dealing with categories.
what if we make the additional constraint that all the elements, and the potential elements of the elements, and the elements of the elements of the elements, and so on, all have finite orders
Uh, to be fair I don't even know how one would make this precise
Or if this can be made precise
So I can't answer :/
not sure what to do here, could someone walk me through these questions? thanks so much!

Ofc
First
Notice the following
If we have a polynomial p in F[x] and I take p(T) for T some endomorphism of V
Then p(T) and T commute!
yeahh
Can you see this?
Nice
We will use this
We will prove (a) by induction. Let $k \in \mathbb{N}$, then $W$ is invariant under $T^{k}$. Indeed, for $k=1$ it follows by hypothesis.
\
\
Suppose now $W$ is invariant under $T^{k-1}$ for some $k \in \mathbb{N}$. Then, $\forall w \in W$ we have that $T^{k-1}(w) \in W$, since $W$ is $T$ invariant, this implies $T(T^{k-1}w) \in W$ and so $T^{k}(w) \in W$ and $W$ is invariant under $T^{k}, \forall k \in \mathhbb{N}$.
\
\
Now, suppose that a subspace $W$ is invariant under $T,U \in \text{End}{\mathbb{F}}(V)$. Then it is invariant under $T+U$.
\
\
Indeed, $\forall w \in W$, we have that $T(w) \in W$ and $U(w) \in W$, so $T(w) + U(w) \in W$ and $(T+U)(w) \in W$. So $W$ is invariant under $T+U$.
\
\
Finally, consider $p(T) = \sum\limits{k=0}^{m} \alpha_{k} T^{k}$. It is easy to see that if $W$ is invariant under a certain endomorphism $U$, then it is invariant under $\alpha U, \forall \alpha \in \mathbb{F}$.
\
\
Notice how $p(T)$ is a sum of terms of the form $\alpha T^{k}$ and we proved $W$ is invariant under each $T^{k}$, and thus is also invariant under each $\alpha_{k} T^{k}$. Since $p(T)$ is a sum of operators under which $W$ is invariant, then $W$ is invariant under $p(T)$ as well ; $\square$.
Here's how part (a) goes.
MisterSystem
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

There are prolly some typos I guess.
But this is the idea
You just need to make the proof cleaner.
omg this is super helpful - thank you so much!!!
Do you know how to apply part (a) to prove part (b)?
Think about this for a second
And if you get stuck
not sure rn, but looking over it i think i can
Try to use this
thanks!
Hey Mathematical Homeslices, how much of linear algebra can I reasonably get from Khan Academy's course?
Some amount, yeah.
Keep in mind
It does everything under R^n
Doesn't go over a bunch of stuff like the formal definition of a vector space, thus doesn't go over stuff like dual vector space, quotients and other more abstract constructions
It also doesn't go over stuff related to invariant subspace decomposition and diagonalizable matrices.
So it doesn't talk about the spectral theorem for normal operators
Doesn't talk about the Cayley-Hamilton theorem
Doesn't talk about Jordan Canonical Form
It talks about more basic stuff
And is good at what it does
At least that's what I remember when I watched it 2/3 years ago
Thank you, I just went ahead and snipped that comment and saved it as a PNG called "Rest Of Linear Algebra." I know that's not true either, but it's a start.
Good luck with your studies!
well i dont think you can ask to pay people
and if you have an issue with a certain question just send it and ask whats bothering you with it
you know how you can visualize scalars as points on a line or 1D vectors and visualize vectors as arrows in space, is there a similar visualization/geometric intuition for rank 2 tensors?
not really, maybe componentwise?
but a tensor is a transformation
it's related to some geometric concepts, but that's about it
you could try to characterize it through the action it performs
but it itself, not really
thank god there's a linear algebra channel
is the inner product a tensor?
it also depends on what you call a tensor
unfortunately there are many definitions depending on who you ask
What do you mean by a rank 2 tensor? There's some confronting definitions in the literature. By a tensor of type $(p,q)$ on a finite dimensional vector space over a field $\mathbb{K}$ we mean a $(p+q)$ multilinear map:
$$
T : \underbrace{V \times \cdots \times V}{\text{p times}} \times \underbrace{V^{\ast} \times \cdots \times V^{\ast}}{\text{q times}} \rightarrow \mathbb{K}
$$
I've seen in the literature people referring me to a type $n$ tensor as a $(n,0)$ tensor, as a tensor of type $(0,n)$ or as a type $(p,q)$ tensor for which $p+q=n$.
\
\
In any case, since we are dealing with finite dimensional vector spaces, we can identify $V$ with its dual, and think about rank 2 maps as bilinear forms:
$$
T : V \times V \rightarrow \mathbb{K}
$$
Which can thus be identified with a matrix $A$ for which $T(u,v) = u^{t} A v$.
MisterSystem

don't multiple definitions of tensors define the same mathematical object?
no
Sso sometimes in the literature, you will see rank 2 tensors being referred to as bilinear forms/matrices
If you are referring to a tensor by what I defined above
Then an inner product on a real vector space is indeed a tensor.
then the inner product is a tensor right?
Yeah
But not on a complex vector space
Because hermitian inner products are sesquilinear
Not bilinear
A real inner product is defined as a symmetric, positive definite bilinear form on a vector space.
So it is a type (2,0) tensor
I.e, has contravariance 2 and covariance 0
oh that kinda makes sense
In any case, this is the definition of a tensor that usually comes up in differential geometry and analysis
There's also something called the tensor product of two vector spaces, or more generally two modules over a commutative ring.
Which is a different concept
Ofc these are related
But tensor products ultimately generalize the concept of a tensor as a certain (p+q) multilinear map.
wait what product is that? that X
Just cartesian product
ah okay
In the usual sense
Sometimes it is referred to as direct product
In the context of algebra
Hello
Can anyone help me clarify a question I have about subspaces?
If H is the solution set of the x vector in a linear system, and the parametric vector form of that is not parallel to the 0 vector, then it cannot be a subspace correct?
Like it is not passing through the origin*
Sorry if my question is confusing*
No, it is not.
You are correct, the solution set for Ax=b is usually going to be an affine space, but not a subspace.
For b≠0
so its like
the solution set to my linear system has one free variable
but it also has scalars that are added onto it
if i had x1 x2 and x3 where x3 was free then x1 would be like x3 + 1 for example
that scalar at the end means that it doesnt run through the origin so it isnt a subspace correct?
Np
What would be the easiest way of findind the inverse matrix of ?

I = I * I
the hint would be to use the definition of nul(A) and linearity of A
for example, recall that A(x+y) = Ax + Ay
and that if a vector is in the null space of A, then Av = 0
im confused tho theres two matrices in Nul(A) ?
what's the problem with having the null space be spanned by 2 vectors though?
this just means that any vector v = aw_1 + bw_2 satisfies Aw = aAw_1 + bAw_2 = 0, aAw_1 = 0, bAw_2 = 0
so v = 0 ?
no, that's precisely the point
they're telling you that A[0,1,-1]^T = 0 and A[1,2,0]^T = 0
that's precisely what Nul(A) = span(...) means
by why are we using NUl(A) = span() to find the other three vectors to the Ax equation?
because of linearity...
i'll give you an example, but you really will need to go review your definitions
you are told that A[0,3,0] = [-3,3,-6]
and also that A[0,1,-1] = 0 and A[1,2,0] = 0
by linearity, you can just add the 3 vectors together
A([0,3,0] + [0,1,-1] + [1,2,0]) = A[0,3,0] + A[0,1,-1] + A[1,2,0] = [-3,3,-6] + [0,0,0] + [0,0,0] = [-3,3,-6]
so [0,3,0] + [0,1,-1] + [1,2,0] = [1, 6, -1] is another solution to the equation
so your adding Ax with the two matrices in Nul A ?
i added x with the two vectors in Null A
but any linear combination of the vectors spanning Null A works
for exactly the same reason: linearity and the definition of the null space
you need to go review those 2 definitions
ohhh ok i get it now
ok
thank you
so for the first solution i got [-2, 5, -7]
but since your adding the vectors i only got two solutions tho
i cannot do anything more for you, i already explained how to find infinitely many solutions
you will need to go review what span means as well
first solution i did [-3, 3, -6] and second solution i used [0,3,0] since they are equal to each other
oh ok
Hey @sour cloud , if you get this figured out, can you give me an idea of what it's asking? I'm new to linear algebra.
sure!
Thanks, starting from the top, what is NulA?
Can you find the inverse matrix of a matrix thats already on the RREF notation?
sure, if after RREF you find the matrix has a full set of linearly independent columns
but note that the inverse of the RREFd matrix is not the same as that of the original
Ahh okay. I've got the RREF(A) equals to I_n, but it only explains that there is existing an inverse matrix of A
yep
Seems like I need to start from scratch - seems like an easier options than finding / having the linearly independent columns
what you can do is to deal with an augmented matrix
if you take your matrix A and augment it to [A I], where I is an identity matrix of the same size of A, then if you RREF the rows so that A becomes an identity matrix, the place where the identity matrix originally was turns into A^-1
That sounds really fancy
We are quite new to this linear algebra stuff, so maybe I'll just stick to the book
And I don't quite seem to get how you even would do it like that (sorry)
well
every time you do row operations on a matrix, this is equivalent to multiplying the matrix A by some matrix, let's call it R (for "row operation")
so something like RA
when you do one row operation after another, it's the same as composing several of these operations, which for matrices is the same as multiplying several matrices together
so Rn Rn-1 Rn-2 ... R2 R1 A
and these matrices (Rn Rn-1 Rn-2 ... R2 R1) multiply A to turn it into an identity matrix
meaning ( Rn Rn-1 Rn-2 ... R2 R1 ) = A^-1
by augmenting A into [A I], when you multiply by (Rn Rn-1 Rn-2 ... R2 R1), this is distributed to both blocks of the augmented matrix
so you get [(Rn Rn-1 Rn-2 ... R2 R1)A (Rn Rn-1 Rn-2 ... R2 R1) I]
and since (Rn Rn-1 Rn-2 ... R2 R1) = A^-1, this turns into [I A^-1]
just as we wanted
wait quick question how do you find a vector? if we dont have Nul span and it was just the matrix and T(v) (linear transformation) ?
i dont know how to write matrix here lol
invert the matrix directly or iteratively (if possible)
wdym ?
also it can be any matrix this is an example cuz i was curious on how to find a vector like this
do gaussian elimination or invert the matrix, idk what else to say
but what do you do with T(v) then ?
the transformation is R^3 -> R^3
ok i found one like this:

hi okay i need some help please if thats okay

i just sont get thiss
like what is it even asking me to do and how? its a bit wordy too
and where did they get the v from?
im just lost
any arbitrary v in R^3 i assume
?? arbitary?
oh ok
so how do i do it? do you have any idea
do i just say how ab will be a 3x3 matrix so will ba and a^2 and b^2
lkke they all end up as 3x3 matrixes when multiplied?
the transformations, not the matrix products
but how are we transforming it??
were multiplying it?
ngl this transformation thing is confusing me
basically i just read this example dont really get it but it looked like they did the transpose of it

it was in the lect notes but i didnt get the b one or c one ? like did they just transpose it like why are they sating r3 is r2
??
oooooh okk multiplying is a type of transformation right?
linear transformation can be represented as a matrix , it basically does the job of T as it sends a vector from 1 space to another
huh wdym linear transformation (sorry if its a dum question)
oh...my bad
i guess you're going through it backwards
what do you think T_{AB} would be? just take a guess
take is as such for now
if the matrix A is a mapping from R^2 to R^2
AB will also me a mapping that works similar to something familiar relating to functions( can you guess what it is?)
idk a 9 by 9 matrix....i dont get this whole transformation thing
why do you say 9 x 9?
oh 3x3 woops
right
so if AB is a 3 x 3 matrix
what would the corresponding linear transformation T be?
r3 to r3
if Ax is T_A(x), then ABx is ...
idk sorry
It should be T_{AB}(x) = ABx
treat them as functions :3
The definition of matrix multiplication is $T_{AB} = T_{A}T_{B}$.
IlIIllIIIlllIIIIllll

okayyyy........
thats not really definitional
almost a definition.
it's a fact that follows from the def of matrix multiplication & matrix reps of linear maps
eh, it takes a bit of work to build that up, which is what 1u1 is trying to do
AB is similar to but not really a composite function starting with B and then A for every vector introduced on it
if matrices $A,B$ represent linear maps $T_A,T_B$ respectively then the matrix product $AB$ represents the composition $T_A\circ T_B$
maybe that will help digest the idea
RokabeJintaro

you can prove this by def of matrix multiplication & matrix rep
i say you CAN prove it, as in it's not an 'immediately' given fact but it follows from definitions, not that you should take the time now to actually do it
ooohh okk sorry
the point is that the above fact gives intuition for viewing matrix multiplication
roketto you need to remember help-seekers dont listen to anything but The Answer™️ /hj
i actually do uko- i want to learn the process too to learn it an answer isnt always enough
or i will fail in the actual exams ...whenever that is ...if i dont get it.....
anyways so what am i trying to do im still lost....
wdym ?
my courses are linear algebra calculus and analysis probabilty and business microeconomics (that was only optional module) and comp classes for this semester
so i think this matriceis is what we doing now part of lin al
not sure abt linear transformations?
i dont thinnk ive done it yet
dunno if i will
but im trying my best to keep up and understand everything thats taught cuz im finding this all really hard and overwhelming ngll
hmm correct me on anything i might explain poorly
so lets put it this way , each matrix corresponds to what you would call a linear transformation i wont define it or go into it but it works like a function and takes a given vector from 1 space say V to another say W in this case T: V-->W or T(v) just like you would work with a function
now this transformation can be represented as a matrix A or B that can take functions from say R^2 to R^3 in this case the number of colums would represent the initial dimension for reasons i wont dive into ,all you need to understand for now is that the 2 matrices A and B when multiplied work just like you would with 2 functions f and g ,only difference being we call them linear transformations and just like fg or f o g is a composite of functions same thing to A and B as each of them represent our so called "function" T namely TA and TB so T_AB would simply be represented by...well TATB and since A represents TA and B represents TB it would simply be T_AB=AB and works as T_AB(v)=ABv
holy run-on sentence
Hi I am struggling to learn linear algebra. We use Sheldon Axlers Linear algebra done right as our text book. I tend to go over the definitions and work my way through the chapter but then I come to the exercises and i do not understand how to even attempt the questions. I would highly appreciate any and all advise on how to approach studying this module
to summarize the point: theres a special class of functions called "linear transformations". these are what linear algebra is named after.
matrices are, in a sense, "alternate notation" for linear transformations, in that they exist in one-to-one correspondence with linear transformations. A matrix with m rows and n columns maps from an m-dimensional vector space to an n-dimensional vector space.
the point is that matrix multiplication and applying linear transformations are the same thing
this is why matrix multiplication is defined the way it is in the first place
oh okk i got till the thid last line lol before getting little confused
i kind of get it
ohh okk
so is a and b originally a transformation like what was it origionally if it is?
i mean if you are studying axler im assuming you are more interested that just using linear algebra
understand the theorems , try to prove them and make sure you know how you can use them
A and B are the matrices that represent those transformations
so ta= a?
equality isnt quite accurate, T_A is a function while A is a matrix
but they represent the same thing
oh....
Honestly my professor never separated the notation T_A and A while learning linear algebra myself
and a function is something that has been transformed?
Is axler enough to get this understanding or should I supplement my studying with other books?
No, a function is a function, the same concept you know and love
i know axler is a 2nd pass that ignores determinants
to clarify
T_A = A is misleading since T_A and A are fundamentally different things
so might be a good idea to use a supplement if its your 1st time doing LA
(if you program, its kinda like comparing the int 2 and the float 2.0, i guess?)
but T_A(v) = Av is true for all vectors v
[T_A]=A is the notation I was shown with the input/output spaces bases on the brackets
the left hand side, T_A(v), means apply the function T_A to the vector v
the right hand side, Av, means multiply v by the matrix A
(on the left)
ahhh thank you. I was starting to feel hopeless
the point is that these are the same process
so its like f(x)=x^2? 
thats not linear, but sure, same idea
you might have a function like:
ye just the overall idea
ooh
[T\begin{pmatrix}v_1\v_2\v_3\end{pmatrix} = \begin{pmatrix}2v_1 - 3v_3 \ 0 \ v_1 + v_2 \ v_2/2\end{pmatrix}]
Namington

T would be a linear transformation from ℝ³ to ℝ⁴
(or perhaps F³ to F⁴ for F an arbitrary field, but same idea)
so the matrix representation of T would have 3 rows and 4 columns
okk yh
to determine the entries of those rows and columns, we typically look at what T does to a standard basis
so do we only look at the rows for the no that goes on r
like what if both rows and colums have changed?
i dont understand the question.
oh yeah, whats the mutliplicative inverse of 2 in a field of characteristic 2
here you changed r3 to 4 by looking at the rows right
so i was saying the no that goes on top of r is that for the rows
the notation ℝ^n just means "the set of vectors containing n real entries"
and also in your example the no of rows changed what if no of colums change or both numbers of rows and columns change
matrices are not members of ℝ^n (unless they're 1xn matrices, i.e. column vectors)
so the question is moot
its like saying "f(x) = x^2??? well, what if x is a hippopotamus!?"
oh didnt know that i thought its what u used to describe the transformation
we're not talking about hippopotamuses
we're talking about numbers
and similarly, in this case, we're not talking about arbitrary matrices, we're talking about specifically column vectors with however many entries
i feel like youre missing some prerequisites here, try rereading earlier chapters
i kinda did.....ive done all notes and qs whilst going along for practice so till like here so that included prev topics
but i got stuck here cuz it wasnt explained well at all- it was the 3 examples i showed thats what it sed then it moved on to other topics and propostions

look its here about transformations

then few pages later they mentioned about the composites.....

i think those 2 are the only 2 things i needed for the q tho
if you understand it now ,works out fine :3 maybe he assumed you are familiar with vector spaces and linear transformation
which im assuming is coming soon
vector spaces are the axioms right like v+0=v or v+(-v)=0 ? i think we did that but thats more to do with vectors not matrixs
not linear transformations- aint done that
@winter harbor so I Just compute the determinant first?
vector spaces contains a field of scalars, a set of V objects called vectors and 2 rules of addition and scalar mulitplication with certain properties
yh we did that with vectors like we did the propsitions
so uko would this be right then for the first bit this is what ive understood so far in how to do it t(ab) is r^3--->r^3 where tab(v) is avbv?
ok so ive misunderstood somewhere
if g=x^2 and f=x+1
you would not say
gof(3)=3^2*(3+1)
you would say its (3+1)^2 or g(f(x))
same thing applies here
what dies the cirle stand for?
just a notation for composite
so that would be a(bv)?
oh ok
same thing as ABv yes :3

oooh okkk so do i do the same thing with the rest so for example ba is r^3-->r^3 again but it would be tba(v)= bav this time
cuz we do a first
yep you got it 
ooooh okk im gnna make notes on this im my own words then try the rest of the q..... i thnk i get it now
thank you ever soooo much
Yeah, just calculate the determinant of C.
ummm im soo sorry but now i dont get this its part of transformations...but diff

i manged to do a and b using what i just learnt like its eqaul to ax so i did that
but i dont get c
c is asking you to verify that the transformation is linear
you can let (x = \cvec{a \ b}) and (y = \cvec{c \ d}) and show that (T_A(x+y) = T_A(x) + T_A(y))
ricey

show that it holds for all (a), (b), (c), and (d)
ricey

so i use a(x+y)= a(x)+a(y) right like do i use their value of a
i think you have to show for all vectors x and y
ye
just take 2 arbitrary vectors x and y ( and show it holds for all x,y)
as mentioned
so like this ignore the messy writing n background

The writing of the logic needs work
could be more formal but yep pretty much it
i dont do formal...something i need to work on
I wouldn't say formal vs. not formal, I rather split it into makes sense vs. doesn't make sense
You did the right calculations but your proof does not make sense
and then is the second bit saying a lambda x is equal to lmmbda ax
A verification and a proof that two things are equal is the same thing
like regardless of the place lambda is put
i think it would be acceptable to submit this, albeit it's not very rigourous
i was taught that verify means to check
so i wouldn't bother proving the linearity here
Hmm?
To verify that 8 is a solution to x+3=11
and to prove that 8 is a solution to x+3=11
i substitute x = 8
is exactly the same question
for the first one i would substitute x = 8 to check that it works
for the second one i would solve for x
Nah if you solve for x you are actually proving the converse
that if x+3 = 11, then x = 8
why are they the same thing? im also used to verify and prove being seperate questions

Mathematics Stack Exchange
Can the terms "Verify" and "Prove" typically be taken as synonymous when reading math texts or in discussion with mathematicians?
If not equivalent, then what are the definitions of "Verify" and "...
Look at "Verify Goldbachs' conjecture for all even integers less than 1 million"
[sic]
How would I go about finding the domain and codomain ? Im confused

Let's take off the 1 million part
Verify Goldbach's conjecture?
That's the same difficulty as proving (or disproving) Goldbach's conjecture hmm
is it not?
isnt that the whole PvsNP situation
Same question yeah?
idts though verifying would be way easier compared to proving from the ground up
its more
prove you can solve this soduko
if you just dumped numbers into it
or
okk i tried the same logic for that bit and it worked- Thank you bothhh
verify the solution
have you all seen "the shortest paper ever"?
oh yeah that is indeed more apt
for the proof that a conjecture proposed by someone was false

That's a full proof that Euler's conjecture is false, a proof that there exists a solution, etc etc etc
yeah but we aren't showing that it's false are we
It's equivalent to proving that there exists a solution to the equation
Look, prove is not a word from another mysterious world
To prove something means to demonstrate it is true, logically
yeah but neither is verify
If all it takes is a calculation, that's all it takes then
verify just means to check
Check that it is true
and here he is checking that yes it works for all vectors x and y
so i don't see why his solution is not ok
If you manipulate both sides of an equation and get 0=0 for example, is that a valid check?
If you assume a statement is true and you show that it implies a true statement, you haven't verified the statement at all
i think the main idea is that verifying is a less rigorous version of proving
verify means
given these cases
test that the statement holds
and here the cases is all x and y with real entries
and he has shown that linearity does hold
That's just a difference in the typical types of problems with "verify" and "prove" in them
But you can swap the word "verify" and "prove" and retain the same meaning
so here is what im thinking
does the tv work? verify it! i turn it on "yep it works "
prove it works i have to then explain in details why its working
if i press the power but i am then recieving a picture from the screen sound works and there seems to be no issue or assume the tv doesnt work which means it wont turn on or show anything but i turned it on then its indeed working!*
i am very open to know why this is wrong
Turning it on also proves it works (at least at the time you turned it on) 100%
i feel like to prove that the tv works
i would have to show that the circuit diagram works
but to verify that the tv works
i just turn it on lmao
Have you ever had to prove the existence of something?
yeah of course
What's the proof like
In many cases it's just "Here's an example, it works, the end"
this just seems like a semantic misunderstanding
but i think in this matrix question
verify works
"prove statement P" and "verify that statement P is true" mean the same thing
"prove statement P(x) is true for x = 7" and "verify that P(x) is true for x=7" also mean the same thing
but its more common to hear "prove" in the former case and "verify" in the latter
just... because
its just a language trend
yeah this is what i was taught
And if your verification OR proof has a serious logical error, it fails to be a verification OR proof
and i don't think it's fair to say that his verification doesn't make sense because he has achieved the question's needs
There's nothing that's a verification that's not a proof
where is the logical error in his proof though?
He started by assuming A(x+y) = Ax + Ay
sure it doesn't look formal but i don't think it's fair to say that it "doesnt make sense"
Already a fatal error
Anyone know how to solve this?

oh
She* oops
ok
ok fair enough
she should've presented it as left = ... right = ...
because left = right then qed
prove
x^2-x has a solution of x=1
find x as if i dont know it
verify x=1 is one of the solution
substitute x
Exactly
ok fair enough
what am i missing 
didn't catch that
prove
x^2-x has a solution of x=1
find x as if i dont know it
this is unecessary
to prove that x=1 solves x² - x, it suffices to just plug in x=1
youre talking about deriving the solution
not proving it
I only got worked up when I heard 2 people claim, what it seemed to me, that logical errors in a verification are okay [because we don't expect students to use correct logic in math unless they're taking a proof-based class]
(sometimes you do have to verify that your derivation actually produced a valid answer, e.g. you didnt introduce extrenuous solutions or whatever)
okk lol ill change it to that 🙂
(but thats covered in grade school algebra so it should go without saying in #linear-algebra )
(though basically every manipulation in LA is invertible so... whatever)
Screams in multiplication by 0
how often are you multiplying by 0 in LA
How about taking the derivative of a polynomial!
its not valid in any sort of row reduction/canonical form/whatever
lol its okay thanks tho
eigenvalues explicitly disallow it
What about multiplication by any matrix in $M_n(\bR)-\GL_n(\bR)$
Icy001

that happens more often but a "typical" matrix in M_n(F) is invertible
with very high probability as n gets large
Hmm to call that a manipulation though...
hmm...
What manipulations does one do in linear algebra besides row reduction and inverting a matrix and stuff
Depends on what you even mean by a manipulation.
It's not as it has a formal definition.
finding eigenvalues, canonical forms, that kinda thing
At least, in this sense.
Linear algebra is fun
It's also the cornerstone of modern math because apparently mathematicians have not found an easier thing to reduce all their questions to than linear algebra
Finite dimensional vector spaces are just nice
I have a lattice question that might be appropriate for this channel 👀
I'm stuck on proving that $L^{\vee\vee}\subseteq L$ for an integral lattice $L$
Icy001

where $L^\vee\coloneqq{v\in L\otimes\bQ:\langle v,x\rangle\in\bZ\text{ for all }x\in L}$
Icy001

An integral lattice $L$ is a free finite rank $\bZ$-module with an integer-valued symmetric bilinear form
Icy001

Wait, so I suppose $\langle \cdot, \cdot \rangle : L \times L \rightarrow \mathbb{Z}$ is the symmetric bilinear form you are referring to, right?
MisterSystem

yep
Ok
And then we consider elements of the tensor product of L and Q
Which satisfy some property related to this bilinear form
Question
How exactly is this bilinear form defined for elements v in the tensor product of L and Q?
It's extended by bilinearity
$\langle \frac 1nv,\frac 1mw\rangle=\frac 1{nm}\langle v,w\rangle$
Icy001

Yes, and by proving that (L^vee)^vee is a subset of L I suppose actually means that we can embedd (L^vee)^vee in L, right?
We can embed it in L tensor Q
14 times a day
Because taking (L^vee)^vee we would be dealing with elements in L tensor Q tensor Q
it's extremely satisfying
whenever i'm struggling to diagonalise some horrible matrix
just multiply by 0
boom
problem gone
Icy001

I just thought of the idea to choose a basis for both L and L^\vee
This could work
(integral basis of course)
We have to be a bit careful here
Because we can't really talk about (L^vee)^vee being a subset of L, as sets these are completely different.
So we want to construct an embedding of (L^vee)^vee into L
They both live in L tensor Q canonically
Yes, after doing some identifications.
In any case, it is still just easier to construct an embedding between (L^vee)^vee and L
Them argue via some isomorphisms
That we have (L^vee)^vee as a subset of L if we instead view these as living inside another space or whatever.
Icy001

but $\frac 12L\nsubseteq L$
Icy001

Yes
But we can identify 1/2 L via its isomorphic image
By the embedding
This is essentially the same thing you are trying to do
The way I defined L^\vee
It's a lattice inside L tensor Q
L is also a lattice inside L tensor Q
that allows us to treat vectors in L and L^\vee on the same footing as vectors in L tensor Q
Yes, by considering it as its isomorphic image via the map q -> q tensor 1
So really doesn't matter
yep
These are just technical details
The thing is that by dealing with embeddings
Is that dealing with linear maps is far more flexible
Than dealing with set theoretic relations
It's flexible but...
I said that $\frac 12L$ can "embed" into $L$ via the multiplication by 2 map
Icy001

but for this question, if $L^{\vee\vee}$ turned out to be $\frac 12L$, then that would be a counterexample to the claim
Icy001

(via all the canonical identifications of the lattices with their images in L tensor Q of course)
I don't see how? But whatever.
because 1/2 L has vectors not in L
so it would not be true that "v is in L^{\vee\vee} implies v is in L"
Is there a name for this construction?
Where is this problem from?
Yeah, it's called the dual lattice
A paper I was reading defined $N$ to be minimal positive integer such that $\frac N2\langle x,x\rangle\in\bZ$ for all $x\in L^\vee$ and I wanted to check for myself that $N$ is the same as the absolute value of the determinant of the bilinear form matrix of $L$
and got stuck on the proof of the proposition I mentioned along the way
Wait, is this definition of N correct?
Ahh oops
Yeah, it doesn't refer to N at all
Icy001

Nice
Ok
The original problem seems nicer to solve lol
I will think about this for a bit 
Yea, let me know if you get anything! I also almost solved my problem, I just need to convince myself that you can always make a dual integral basis for L^\vee such that <ei, \eps_j> = \delta_{ij}
where e_i is an integral basis for L and \eps_j is the hypothetical dual integral basis for L^\vee
What does that mean
Why is the multiplying matrix by matrix together useful
matrices correspond to linear transformations
multiplication of matrices corresponds to getting the transformation that's two transformations combined
Do you mean $x^{T}y$ or you mean an inner product from vector space of matrices
ShatteredSunlight

So in that sense its analogous to matrix composition
yes thats what i meant
ok, ty. It just seemed unintuitive because it doesn't involve matrices of the same dimensions, like composition does
thanks!
no
oh wait I thought there was a 'dot' word somewhere, I think I'm seeing words that weren't sent :(
i made a mistake, thats on me
even ones of not the same dimension
yeah they edited it
_>
i was not aware
Dah of course there is such a dual basis, just take it in $L\otimes \bQ$ for the given bilinear form....
Icy001

so that's my problem solved
Have you ever solved a matrix vector equation before?
yes
T[v]=Av
it's stated in the screenshot that A is T's standard matrix
That question also wasn't directed at you.
It's not your question...?
It's not your question...
you're not roy347
Some messages deleted...
can someone help me part 2 part a I don't remember how to do it.

yes i have but idk why im getting this incorrect
do i just choose a vector from the matrix and set it equal to T(v) ?
definition of basis
do i choose any row in the matrix?
ohhhhh ok
wait sorry im confused how am i using matrix ?
do i do this equation for each row in the matrix ?
do i need reduced row echelon form ?
got it wrong 😢
i put [20, -30, -36]
and it was incorrect
how do you write Ax=b into an augmented matrix..?
Ok... but did you row reduce the augmented matrix?
or just the co-efficient matrix?
just the matrix that was provided to me lol
that's why
was i supppose to do something before?
You need to write the linear system as an augmented matrix then row reduce, like any other linear system
ok

so this is the augmented matrix : ```
[ 1 1 -4 18
-1 1 4 -26
0 4 1 -21]
ill just do rref since im good at it
Ok, but do RREF on a 2x2 system instead, it's quicker
yes.
so row reduce that
ok
I solved it and got
-3/2
1/2
5
$c_1+c_2=3-5 \ c_1-c_2=4-5$
Mosh

i got [ 1 0 0 2 0 1 0 -4 0 0 1 -5 ]
minus sign is fucked up somewhere
?
2-4-5!=3
i put [2, -4, -5] and it was right
oh I was looking at Krusty's system, my bad
thank you sm!

convert [1,2,3] wrt B into a vector wrt the canonical basis
$[1,2,3]_{\mathscr{B}}^T=1b_1+2b_2+3b_3$
Mosh

by definition of co-ordinate vectors

yeah, not checking the algebra though
will check the fact you said 0+0+3=0
and 1+2+3=0
So do I just Solve the matrix:
1 2 3 0
1 -2 3 0
0 0 3 0
????
.
oh nvm then
huh
ok then no 0
just use definition of co-ordinate vectors, which I posted

yes
so it would be
6
2
3
Mosh

thats it, thats the answer for part c?
yes.
for 3 do i write it like this
1 1
1 -1
2 0
1 4
0 0
transpose it, then you have the matrix.
Hi, So ive gotten this far and I am trying to find the values of the parameter t for which the system has a unique solution. Can someone provide what direction I go from here. I used cramers rule.

Ax=b has a unique solution for all b iff A is invertible by FTIM

hey quick question how do you find T(v) if the vector isnt given to us?

i cant do reduced row echleon form since its only x1 and x2
Not sure what you mean. I know that there is a unique solution for all b If A in not singular. Im confused on if that is all I need to do.
what do you know about det(A) if A is invertible?
its not 0
yes, so you need det(A)!=0
@nocturne jewel if I transpose it then wouldn't it just turn to
1 1 2 1 0
1 -1 0 4 0

yes.
Okay! So in this case, A will have will unique solutions when t is equal to all real numbers excepts 2/3.
Because if t=2/3 than determinate is equal to 0
🤨 check your det(A) expression again
$(3t)(5t)-(5)(12)$ is det(A)
Mosh

row reduce then write the basis.
so i rref it?
So I would just set that to 0 and find the values ? I got t=2, and -2 ?
If that was all I had to do to find values of t did I just waste my time....bruh
yes, t=+-2 makes A non-invertible
I really need to upgrade my understanding of linear algebra terminology. Sometimes, I just dont know whats being asked of me so I just do the ole relaible......determinant or RREF
if you can find FTIM show up, that's usually a good sign, yeah
i row reduced and got
1 0 1 5/2 0
0 1 1 -3/2 0
you can reduce that more
really i thought this was the lowest it can go
If "S" is a set of all 2x2 singular matrices...
That means any 2x2 singular matrices that I can come up with will be elements of set "S" right ?
Just getting the terminology clear
And also...do 2x2 matrices contain an additive identity matrix such as the zero vector ? Or actually I should ask.. does "S" contain that ?
R^(2x2) is a vector space, you're asking if the space of singular matrices forms a subspace of it
@nocturne jewel do you know how to do mine i kept getting it incorrect.
Write v as a linear combination wrt the w vectors.
aint no way i can reduce it anymore
how do you write v as a linear combination?
Yes, so does S contain an additive identity matrix and can you describe it. What are the properties ?
Yeah man
its just a system of equations
if we suppose that $v=c_1w_1+c_2w_2+c_3w_3$ then thats a system of three equations in three unknowns.
nix (@ me for the love of euler)

Really late but I finally have an answer just in case.
It suffices to count the number of $m$-dimensional sub-spaces of $\mathbb{F}_p^n$. We do this in two different ways.
Firstly, the number of $m$-dimensional sub-spaces of $\mathbb{F}_p^n$ is bounded above by $|\mathcal{P}(\mathbb{F}_p^n)|=2^{p^n}$, since the collection of all $m$-dimensional sub-spaces is a subset of $\mathcal{P}(\mathbb{F}_p^n)$.
Let $X$ represent the number of $m$-dimensional sub-spaces of $\mathbb{F}p^n$. Let $W$ be one such $m$-dimensional sub-space . Since $W$ is isomorphic to $\mathbb{F}p^m$, then there are a total of $p^m$ vectors in $W$, thus the number of ways to choose a basis for $W$ is given by $\prod{k=0}^{m-1}(p^m-p^k)$, since each collection of $m$ linearly independent vectors in $W$ generates the same sub-space $W$. It follows that $X\cdot\prod{k=0}^{m-1}(p^m-p^k)$ is the number of ways to choose a linearly independent set of size $m$ in $\mathbb{F}_p^n$.
Alternatively, we have that $\prod_{k=0}^{m-1}(p^n-p^k)$ also counts the number of ways to choose a linearly independent set of size $m$ in $\mathbb{F}_p^n$.
We obtain our result as
[\prod_{k=0}^{m-1}(p^n-p^k)=X\cdot\prod_{k=0}^{m-1}(p^m-p^k)]
so the number of sub-spaces of $\mathbb{F}p^n$ of dimension $m$ is given by
[\prod{k=0}^{m-1}\frac{(p^n-p^k)}{(p^m-p^k)}=\frac{(p^n-1)(p^m-p)\cdots(p^n-p^{m-1})}{(p^{m}-1)(p^m-p)\cdots(p^{m}-p^{m-1})}]
and we see that [\sum_{m=0}^{n}\prod_{k=0}^{m-1}\frac{(p^n-p^k)}{(p^m-p^k)}] counts the number of sub-spaces of $\mathbb{F}_p^n$.
c squared



lol same
hi, what’s algebra ?
Algebra (from Arabic: الجبر, romanized: al-jabr, lit. 'reunion of broken parts, bonesetting') is one of the broad areas of mathematics, together with number theory, geometry and analysis. In its most general form, algebra is the study of mathematical symbols and the rules for manipulating these symbols; it is a unifying thread of almost all of ...
the space of all real polynomials is infinite-dimensional, right? the basis would be defined something like (x_1, x_2, ...)?
yea
its a hamel basis even, since each polynomial can be written as a linear combination of finitely many basis elements

what if n is even and dim S_1 = dim S_2 = n/2
or more generally, what happens if S_1 and S_2 intersect non-trivially
i see that now but if a vector space V has a basis of n vectors then every basis of V must have exactly n vectors. So why doesnt the union of basis 1 and basis 2 always guarantee a basis = n
you're missing the two key points of a basis. not every collection of n vectors is a basis (its not even guaranteed that B_1 U B_2 will have n elements)
they need to be both linearly independent and spanning
if my vector spaces intersect non-trivially, B_1 U B_2 either wont be spanning or linearly independent
an example: lets work in V = R^3 and let e_1 = (1,0,0), e_2 = (0,1,0) and e_3 = (0,0,1)
let S_1 = span(e_1, e_2) (this is the x-y plane)
S_2 = span(e_1) (this is the x-axis)
Then dim(S_1) = 2, dim(S_2) = 1 and 2 + 1 = 3 = dim(R^3) and
B_1 = {e_1, e_2} and B_2 = {e_1} are bases for S_1 and S_2 respectively, but B_1 U B_2 = {e_1, e_2} is not a basis for R^3
ahhh
i see it now
i appreciate the help 🙂
but i have one question about what you said earlier
sure
what does it mean when two subspaces intersect "non-trivially?" The point at which they intersect is the non trivial solution?
two vector subspace S_1 and S_2 intersect trivially if S_1 intersect S_2 = {0}
phrased differently, the zero vector is the only vector that S_1 and S_2 share in common
so if the zero vector is one off n vectors that S1 and S2 share in common, they intersect non trivially
S_1 and S_2 could share infinitely many vectors in common
but S_1 and S_2 intersect non-trivially if there is at least one non-zero (or non-trivial) vector that S_1 and S_2 share in common

what have you tried
if you have $A$, $B \in \bR^2$ such that $\cancel{\exists} c \in \bR\ cA = B$, how do you prove that ${A, B}$ spans $\bR^2$?
CoolShot

@solemn lotus Do I just write it like this
(1, 1, 2, 1)
(1, -1, 0, 1)
Then row reduce?
?
it's not true. take A = (0, 0) and B = (1, 0).
sorry forgot to mention A, B ≠ (0, 0)
Let $A = (a,b)$ and $B = (a',b')$ and consider the matrix:
$$
M
\begin{bmatrix}
a & a' \
b & b'
\end{bmatrix}
$$
Notice that since the columns are linearly independent, then $M$ is non singular which implies that $\forall y \in \mathbb{R}^{2}$, $\exists ! x \in \mathbb{R}^{2}$ for which $Mx = y$.
MisterSystem

That's one way to do it.
Another way to do it
Is just using the fact that R^2 has dimension 2
And you requirements imply that A and B are linearly independent.
And since a basis is a maximal linearly independent set and we know the dimension of R^2 beforehand.
It must the base that A and B form a basis
thus, equivalently, they are a linearly independent set that span R^2
gotcha, ty
Just to clarify: If $U$, $W$ are subspaces of $V$ and $U$ and $U\oplus W = V$, then every element/vector $v\in V$, $w \in W$ is linearly independent, right?
justini

I think so, using plus with circle is also asserting that their intersection is zero
Implicitly
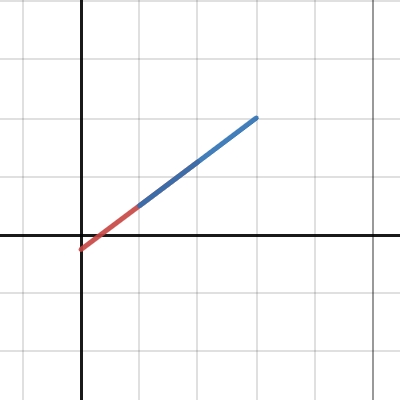
hey i kinda need a little bit of help basically im combining the printed lecture notes with the ones i made like in the lectures but i dont get this how is 0 -0.5 the same as 2 1
i put a star on it

i tried some working in pencil but its not giving me the same answer like i dont get why he did that step saying 0 -0.5 + lambda 4 3 is equal to 2 1 plus lambda 3
can some one explain?
oooh he sed they were the same
I can confirm that (0, -1/2) is different from (2,1), HOWEVER
The line (0, -1/2) + lambda*(4,3) is the same as the line (2,1) + lambda*(4,3)
(0, -1/2) and (2, 1) differ by a multiple of (4, 3)
in the lect notes it just has 2 1 plus labda 4 3 as the answer
yh lol so i dont really get it
any vector in the form (2, 1) + λ * (4, 3) can be written as (0, -1/2) + λ' * (4, 3) as well
and vice versa
assuming your teacher isn't an incompetent piece of garbage, yes.
but how did they get there?>
sounds like they might have just gone for the y-intercept as their base point
aah okk
like i dont get what the multiple is for same line?
like i cant multiply cuz anything time 0 is 0 and if i add 2 then id get (2, -0.5+2) which is which is (2, 1.5) not (2,1) if ugm
Did you play around with my cute thing?
You can the numbers in the range for t in both things on the left
Did you figure out how it works?
wdym? i just substituted nos in
Did you figure out how what it's showing on the right corresponds to what you type in on the left
yh it extends the line or shrinks it
Ya
the lager the values the longer the line?
Try changing the equation now
to?
kk
Play around with it and have make observations and try to figure out how it works

the line is parallel if i change that
Ya
How can you predict where exactly the line ends up
based on what you change (0, -1/2) to
also if you change (0, -1/2) to (2,1) what happens
can you find other vectors besides (2,1) where the same thing happens
thats the same line
bigger values the more the parallell
where its the same as (0 -1/2)
thats scale factors of the numbers right
Test your hypotheses
omg it isnt scalar factors that mean on same linee
:)
Keep playing around until you find something
like keep changing the (0, -0.5)
yes
nothing is workinggggg
okk i got 4 and 2.5
Nice
dunno how it realtes tho?
Well keep playing then
cuz one is times 2 another is times 2.5
Until you can reliably make another one
im just gnna end up with similar logic uko
It's not the right logic yet