#linear-algebra
2 messages · Page 220 of 1
. . .
what is T_p(u(x))?
idk
all the way back here (in the problem statement) T_p(u(x)) is defined to be p(x)u(x)
so c p(x)u(x) equals what?
are you answering this?
yes
is this for the last line of the proof
yes
what's the answer?
c(p(x)u(x)) = cTp(q(x))
yes
assuming u(x) = q(x) (not sure what happened here but im rolling with it)
so can you complete the proof?

the proof of additivity is also correct, but it's a little messy
yeah
additive + homogeneous = linear
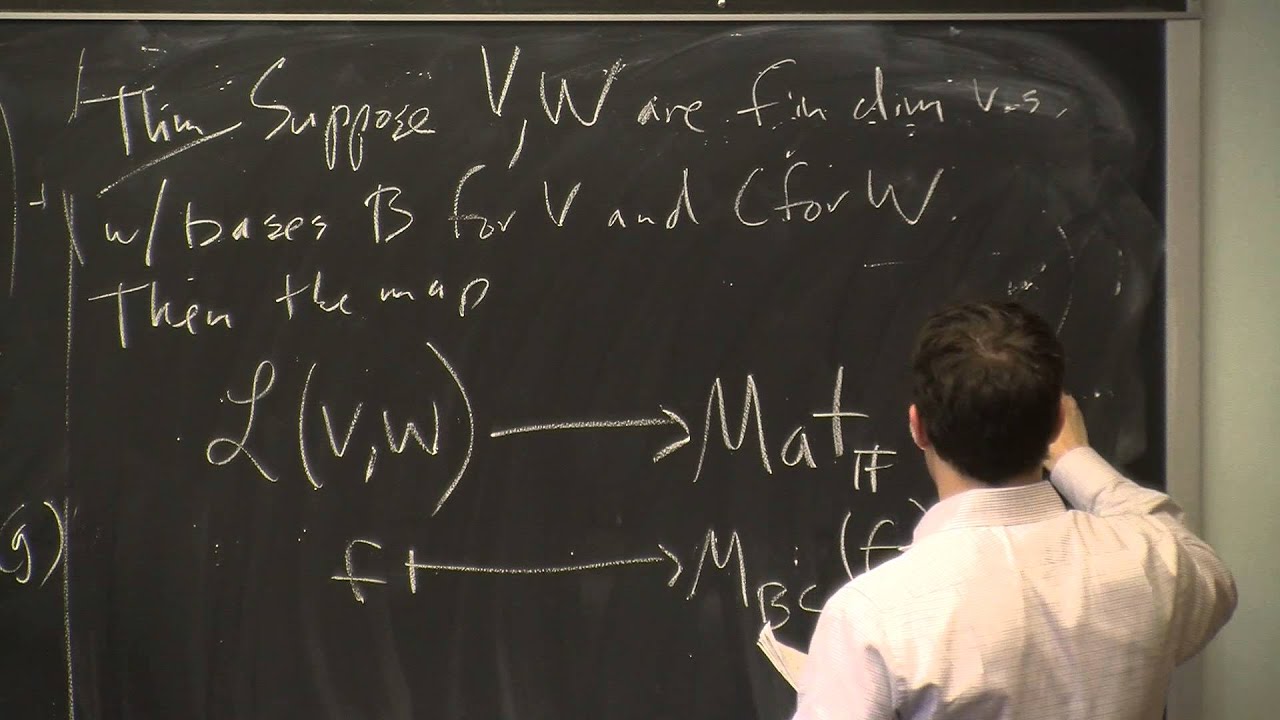
you want to compute $T_p(1)$, $T_p(x)$, and $T_p(x^2)$, find them in terms of $1,x,x^2,x^3$, and then put the coefficients into some kind of matrix
TTerra

roughly
i'm being vague on purpose since i think it'd be worthwhile to check again the definition of the matrix of a linear map with respect to two bases
so put in 1, x, x^2 for Tp
yup
but idk the equation for Tp
you do....
recall, again, the definition of T_p
all i know is Tp(q(x)) = p(x) q(x)
so i can put in 1, x, x^2 for p(x)

that means 1,x,x^2 would all be q(x)
yes roughly
did i do this right

TTerra

you mean T_p(x) = 3x^2 + 2x and T_p(x^2) = 3x^3 + 2x^2, right? then yes
well that's for you to figure out
do you have a definition of "matrix with respect to bases" for a linear map?
no
i know that the ending should be a 4x3 matrix
ending matrix of Tp^
@wintry steppe

confused on this
<@&286206848099549185>
hello?
https://www.youtube.com/watch?v=9zPeRXnzEdE
play it at 1.75 speed. he talks slowly.
regarding: #linear-algebra message
https://www.overleaf.com/read/wkktvyvtcntr
I have examples. your problem seems neat. i'll work on it tonight at work. and write it up fully. i'll add it to this document.
An online LaTeX editor that's easy to use. No installation, real-time collaboration, version control, hundreds of LaTeX templates, and more.
are there examples in there
section 2. are my examples.
this pdf is very much a WIP and is rough around the edges, but the examples are cleanly written imo.
page 2
probably the identity matrix with n^2 entries? hard to say for sure with no further context

it's the identity matrix of size n^2 by n^2
without spoiling the answer, what does the phrasing "use it to calculate det[T]_a_a" mean exactly
am I supposed to pretend that I don't know that the transformation matrix is the identity matrix and figure out the determinant through the basis?
so if complex eigenvalues of a real linear transformation correspond to rotation, what do defective eigenvalues tell us about the transformation?
that it cannot be diagonalized
in ur problem there are infinitely many matrices for which this will be true. if it was (1,1)->(2,1,1) and (1,-2)->(1,1,1) then u could actually bc
A[1 1; 1 -2]=[2 1; 1 1; 1 1] and then u could multiply by the inverse of [1 1; 1 -2] to get A.
if u just want one particular matrix u could do smthn like set the 3rd column to be zero and then do that process with just the first two entries of the input vectors. so (2,1)->(1,1) and (1,1)->(1,-2).
well ye but i mean like what it looks like or does. like rotation from complex eigenvalues
nothing special other than that
it just makes problems involving that matrix more difficult to solve
or more generally, that linear operator
would it be like a shear? since thats what upper diagonal matrices are iirc
no
rippppp
it just means you can't split it easily into smaller problems
you poor poor thing
i do think, but don't know if it's true, that all shears are defective
whether all defective transformations are shears is another matter
but yeah. not everything has to have a geometric meaning
how do you define shear?
$\begin{bmatrix}1&k\0&1\end{bmatrix}$ and $\begin{bmatrix}1&0\k&1\end{bmatrix}$ are the shear operations in $\bR^2$ i think
nix (@ me for the love of euler)

yeah, right
i think basically the row operation of adding a scalar multiple of one row to another is a shear in general
could be wrong
in K^2 every nondiagonalizable is similat to a shear then
yeah those two matrices are nondiagonalizable
neat
if being triangular is similarly shear-like maybe that's the answer but id need to experiment with it a bit
do double backslashes to end rows \\
right. im going to plot it real quick
yeah kinda looks like a shear ig. wish i has a program to animate linear transformations in R3 so i could see it better.
maybe in some sense all nondiagonalizable are direct products of "shears"
need to define what a shear is ofc
jordan normal form
also just fyi if you're curious, in 3b1b's video on eigenvectors i think he actually animates a shear in R2 and shows visually how it doesn't have two eigenvectors.
id imagine its jut fixing k dimension and rotate+stretch wrt n-k orthogonal dimensions lol
well nvm it cant be rotating
nvm i think it can
forget it i misunderstood shears just now

yea, the question is what "shear" means
I think of shearing transformations in terms of the determinant
there's a nice rule that if you add a multiple of a column (or row) of the matrix to another column (or row) then it doesn't change the determinant
it's like when you're in grade school and you think of the triangle formula being base*height/2, we don't care about where the apex of the triangle is relative to the base, just its height above it
that's because area of a triangle/parallelogram is unchanged by shearing
same goes for higher dimensional versions of this for parallelepipeds
so now what are the matrix multiplication way of writing 'adding a multiple of a column to another column'?
it's just an identity matrix with a scalar on an off diagonal entry
so that's what a shear means to me
I should just say this is just multilinearity of the determinant but one of the matrices is linearly dependent so it's 0 when you expand it
that is indeed a nice way to think about it merosity, multilinear in the rows is not something that everyone would accept right away.
Perhaps pure linear algebra people mean something different by shear. But in continuum mechanics which defines all these things using linear algebra a shear is any off diagonal term in the stress tensor. So in that 2x2 case Carla posted above that's a stress tensor with pure shear, so it would literally shear vectors when it operates on them.
https://www.continuummechanics.org/stressintroduction.html
Stress
If I wanted to transform the vector P(x,y,z) to P'(x',y',z') so that there is no z-component, would I do it by rotation about the y-axis or just a normal transformation from one point to another?

\phi is the angle between the x-axis and the shadow of P on the xz plane.
\theta is the angle for P
looks like a projection onto the xy plane, not a rotation
and then P'=[x',y',0] ?
or maybe not, what exactly are the coords of P'? since it seems not to land on the same x and y coords as P
That might just be my error in drawing, I added the P' vector to show what I mean by projecting P onto the xy plane
I just want P projected such that it doesn't have a z-component
and only x and y then, so onto the xy plane
then P' is just (x,y,0)
Alright
if you would use a rotation, the point would land further away
Even if I rotate by \phi ?
just think about it for a moment
the radius r is sqrt( x^2 + y^2 + z^2)
rotations preserve length
any nonzero z will yield a larger radius
OH
if you rotate that larger radius, you get a point further away on the xy plane
if you project, length is not preserved
this is (if i understood you right) what you want
you get instead only length in the xy plane
Yes P needs the same length in the xy plane
so that means no rotation and just like we said before for P'=(x,y,0)?
that's what it sounds like to me

Mathematics Stack Exchange
The Leontief Open (Production) Model is a simplified economic model for an economy in which consumption equals production, or input equals output.
In this model, the entries in the consumption matrix
Who pinged me?

Economics Stack Exchange
Q&A for those who study, teach, research and apply economics and econometrics
might be a better place for your question
@glacial mango Thank you, I'll duplicate the question there
I didn't understand this part

can anyone explain whats the difference between bound and free vectors
@grand cove Free vectors can be considered as displacement in a multidimensional space, whereas bound vectors can be considered as an ordered pair of points.
in terms of like linear algebra
i read somewhere that free vectors dont make a vector space
and derivates of displacement vectors??
is there any general concept like difference of two vectors from same space make free vectors?
what dont you get exactly?
that what displacement is right?
According to the definition, b_{m+1} , b_{m+2}..... b_n are equal to 0
yep
they're just any scalar
and what about position vector? they are also displacement vectors right? but they dont really seem to be free
@grand cove Considering a vector in $R^n$ there are $n$ coordinates. Each free vector in $R^n$ defines a displacement in in every coordinate. If we consider a function $f: R^n \to R^n$ this function, it can be differentiable if (insert the part from calculus)
JohnDark

Oh got it my bad
the tl;dr is that any degree m poly can be "made into" a poly of degree n>=m by adding the corresponding terms just with the 0 scalar in front of it
example I can "make" ax+b into a quadratic by writing 0x^2+ax+b
yep
@grand cove You can find partial derivatives of the coordinates if the function allows
For every point $\textbf{x}$ in the domain of definition of $f$ there is a corresponding free vector that can map the point $\textbf{x}$ to $f(\textbf{x})$. That free vector is $\textbf{v} = f(\textbf{x})-\textbf{x}$.
JohnDark

Then the graph of the function $G(f)$ (set of all ordered pairs $(\textbf{x},f(\textbf{x}))$) can be considered as the set of bounded vectors
JohnDark

Here the points are modelled as tuples in $R^n$
JohnDark

If you meant $(([\textbf{x}]_1)^2, ([\textbf{x}]_2)^2, \ldots, ([\textbf{x}]_n)^2)$
JohnDark

im having a hard time tryin to understand this im a physics major
You just should think what happens at every coordinate
hmmm
matrix differentiation
The point (represented by a column matrix) is a matrix too
ahan
alright i kinda know how to do that
you basically describe function by a parameter in vector form
and then represent it as matrix and take its derivative??
Yes, that's totally acceptable, just make sure that you actually need it
in the context or row and column ordering, what does R1, R2, R3, R4 and R5 mean?
this is not in english but you might get a sense of what i'm trying to figure out

amd and colamd are matlab commands
Bruh when does LA get exciting
😅
once you start getting into vector spaces ig but its all exciting to me
I just felt bored by this polynomial definitions and stuff
It's in vector spaces chapter
It certainly isnt the "glamour" of calculus, but yeah exciting is relative
Integration in calculus 1 felt horrible
integration is calc2
Need to resume learning calc 2
no integration is introduced in calc 1
Intro to integration is calc 1
but only goes as far as u subs basically
Techniques and stuff are calc 2
eigenvalues/eigenvectors are pretty rad i think
diagonalization is cool
the applications of it are cooler though tbh
Ohh
like linear systems of differential equations stuff
but thats an optional topic
rarely covered in a LA class
I'm interested in learning a little application side too. I guess computational programming is useful for employment
Least Squares

I'm not sure if this is true or false.
I tried explicitly writing all the entries of A,B, and AB but still cant prove that the columns add up to 0 (def of linear dependence)
well whats an equivalent condition to having linearly dependent columns
we can write those columns as a linear combination of one another
I am going for something else, can we make a statement about say, the null space of B
the null space of B is not empty
mhm, and do you see how to proceed from that
its been a while, but, you probably meant the nullspace of B has other things in it beside the 0 vector. maybe that might help you to form the argument?
coming from a different point of view, given functions g and f, the composition g o f is injective if and only if f is injective and the restriction of g to the image of f is injective.
the columns of B being linearly dependent means that B is not injective, so the composition AB has cannot be injective, hence it has linearly dependent columns.
But composition is not equivalent to matrix multiplication?
in a suitable basis, yeah
Matrix multiplication is constructed such that composition is equivalent to it
not too hard to see either, you look at how the linear operator acts on a basis and that's enough to make a matrix. That matrix encodes everything because linearity lets us decompose any vector down into a linear combination of the basis vectors.
matrix multiplication is defined to be equivalent to composition of corresponding linear maps
A more straightforward argument would be that since the columns of B are LD there exists a nonzero vector n such that Bn=0. It follows that (AB)n=0 implying AB has a nontrivial null space implying the columns of AB are LD.
yeah thats what i was going for
One interesting property is that the inner product doesn't change if you apply them on either side
If you take <·,·> to be the standard dot product, then a symmetric matrix S has the property that <SX,Y>=<X,SY>
you can use them to measure lengths of vectors as a metric tensor. In particular the lengths of vectors are scalars and so should be unchanged by coordinate change, so let's say we describe our change of coordinates by the matrix J, with Jx=y, we want |x|=|y|. We can look at the squared length as just y^T y = x^T (J^TJ) x = x^T G x and so the matrix G here encodes how to measure length correctly in this new basis
in general if you care about x^T A x and A isn't symmetric, you can always symmetrize it too, since it's just a scalar, add it to its transpose and divide by 2 to get x^T ( (A+A^T)/2 )x, it's convenient in the sense that you only have n(n+1)/2 degrees of freedom as opposed to n^2 to worry about
well in my example G=J^TJ so it's really every entry is all the combinations of the dot products of the basis vectors, so it's geometrical in that sense
yeah I wouldn't try to picture it either lol
but the dot product is a visual thing at least
the most useful way to look at it might be as being diagonalizable in an orthonormal basis
idk what exactly you meant by "diagonalization" up there
diagonalization usually denotes using an invertible matrix P to turn the matrix in question into a diagonal one
A = P^-1 D P -> P A P^-1 is the diagonalization of A
strictly in 2D, ok
which 2 vectors?
what are you calling transpose
that's not a transpose
be careful not to ruin what you already know in an attempt to visualize new stuff
if you're comfortable with inner products and rank 1 matrices
another useful way is to note that a symmetric matrix A can be written as B B^T, for some matrix B
at least for positive (semi)definite ones
then you can see Ax is the same as multiplying x by several rank 1 matrices (outer products of vectors in B) and adding the results up
still, that's only for a special kind of symmetric mat
idk why you keep trying to visualize it tho
the whole point is kinda to abstract what "vector" means
it's fun! and it helps too
sure, you can make vector spaces from, say, functions and not points in n-D space, that doesn't make drawing lines and planes useless nor needlessly restrictive imo
vector space of functions is just space of sequences with a really large number of entries
that's how u visualize it
unfortunately sequences are already infinite-dimensional, so good luck drawing that out
in similar ways at least
i cheat and allow infinite linear combinations so that I can take the function delta(x) which is 1 at x=0 and 0 otherwise and then my basis is delta(x-a) for all a 😎
very easy to visualize, even if it's fake 😭
why cheat? just take formal infinite linear combinations and work with em
formal infinite considerable tteppa
infinite linear combinations are not necessarily still in your vector space
like, power series aren't in ℝ[X] anymore or whatever?
like continuous functions over R
an infinite sum of continuous functions is not necessarily continuous
hi! I need some help at the last part where it says "by using the expression..." am i supposed to just substitute PDP^-1 into B = QAQ^-1, also sorry if this is not the right place to ask, im not sure if it is;;;

This is shown in the answer scheme, but I'm not very sure why is it QPAP^-1Q^-1
I think its just a typo?
yea looks like a typo
the point should be to show that the operation QAQ^-1 is "eingenvalue-preserving"
don't worry about it 😛
bleh
let QP = M,
then B = M D M^-1, so that M diagonalizes B
B has eigenvalues D
A has the same eigenvalues D
meaning B=QAQ^-1 preserved the eigenvalues of A
How do you get the area of a parallelepiped formed by 3 vectors?
I know that you can get the area of a parallelogram formed by 2 vectors by getting magnitude of their cross product
how does this work with ppiped though
take the dot product of the third vector with the cross product of the other two
it's more clear if you think of the cross product in the determinant, then the dot product is just filling in that final row
the determinant is what's getting you the volume of the parallelepiped
can you explain what this means in more detail? i'm starting to get it i think, thanks a lot
take the cross product determinant, and expand it along the row of basis vectors so you have your 2x2 determinants like so: |..|i-|..|j+|..|k
now when you dot another vector with this you're really replacing the i,j,k with the components of that vector, so you have |..|x-|..|y+|..|z
now you can go backwards and put x,y,z into that row the basis vectors were originally in
in R^n, if you have n vectors and you want to find the volume occupied by the n-paralleletope that those vectors create just form the n by n matrix whose columns are the n vectors in question and take the determinant of that matrix

@copper heath
Maybe this picture helps as well?
Observe how the volume is based off the dot product between A cross B and C

err, i don't really see how the dot product comes into play from that picture?
Maybe In limiting cases.
Say C were completely in line with the cross; then its just orindary multiplication.
But if C were completely perpindicular to the cross, then its zero.
Yes.
So intuitively, we decompose C into parts that are parallel with the cross, and parts perpendicular.
The magic is the total volume is a "linear combination" of those "projected" sums.
(intuitively it arises because each of the projected volumes point in the "same direction".)
yeah i think that makes sense..
it'd probably click more once i start playing around with it
i just saw a problem somewhere where it gave me three vectors and wanted me to get the volume of the parallelepiped and i was very puzzled
waaaaaaaait
the three vectors are just linear combinations of the basis vectors
so it's literally just the determinant like coycoy said
determinant and the method that the others mentioned are equivalent, in R^3 at least
yeah i understand that, but it just being determinant is a lot more intuitive to me
hello, if i have a flat vector (y=0), how do i rotate it upwards towards positive y axis by some radians
i thought of a method but i think its inefficient
not quite sure what ur getting at here. any three vectors are lin. combs. of the standard basis vectors
yeah i know its obvious, but it just didn't click to me how it related to the parallelepiped
i thought of just doing sine as you would (you get a longer than needed vector) you normalise it and scale by originally intended length
oh i didn’t mean it was obvious, just unsure what point u we’re trying to make
there must be some vector manipulations to do this right?
@crimson jay You can form a rotation matrix and apply it to your intial vector.
but wouldnt that take even more calculations
and arent rotational matrixs along x, y or z axis
technically this is rotating about its normal
so (0,1,0)^thevector axis
in my head i was thinking "oh since det is just how the unit paralleletope gets scaled by a linear transformation, if you put the three vectors in a matrix it pretty much falls right out that the matrix's det is gonna be the new volume"
@crimson jay Starting with (1, 0) rotate it by theta. Where do you end up?
Maybe draw a triangle? you may find its x and y componens are just cos and sin resp.
its a 3d vector
anyways it would be r cos theta, r sin theta
(cos theta, -sin theta)
(sin theta, cos theta)
hmm im not sure i see what you mean....
in my head with your rotation its all flat along the x-y.
yea i agree with you (1, 0) gets mapped to (cos theta, sin theta)
so that means any (x, 0) say, gets mapped to (x cos theta, x sin theta), and this answers your og question.
this is along the axis z tho
rotation along z
since you are using x y
right now i want to rotate it into the third dimension
by a angle theta
like this would work but it looks dirty
im pretty sure this problem is well solved
find the dydx first?
👀 isnt F usually integral
youll have to use the rotation matrix no matter what axis, but the computation is cheap
how do i construct this rotational matrix?
its along the axis perpendicular to both the up axis and the original vector
i can get it via cross product
e.g. [1 0 0; 0 cos sin; 0 sin -cos]
thats is z axis no?
which do you want? thats x axis fixed, rotate the yz plane
then its [cos 0 sin; 0 1 0; sin 0 -cos]
however it is rotated towards the y axis
which means its not along any of the x or y or z axis

yea lol just draw a picture
i dont what u mean cuz rotation is fixing some line and rotating the plane orthogonal to it

so can u represent the fixed axis as a unit vector?
then its all a matter of change of basis, u have the matrix [1,0,0;0 cos sin; 0 sin -cos] wrt the basis containing the fixed axis as a basis vector
Rz(Ry(vector))?
but this is computational heavy so probably theres better way to do it
i thought of this method where i just introduce a new y value
based on right angle triangle
normalise it and scale by original length
👀 wait this is a vector manipulation but expanded out
actually its fine, so say u want to rotate a vector v by angle theta across an arbitrary axis represented by some unit vector u
then u construct a ON basis containing u and 2 other ON vectors and compute coordinate of standard basis vector in the ON basis
wats on
orthonormal
ehh
you mean i pull it upwards?
while maintaining same projection if looked from top?
its like perpendicular vectors basically, but in a different coordinate system chosen to your convenience
the y value should be tan(theta)*|v| right
tbh i dont have much idea what you mean sorry 
but if you want to do rotation w.r.t a random axis of your choice (thats not along any of the x,y,z axis) you should use change of basis and work with a new coordinate system that sort of captures the rotation well
and so you may want to look up change of basis since all of its pretty convenient
but of course if your just rotating and fixing one of the 3 x,y,z axis you can directly apply one of the rotation matrices in R^3 you can get from google search
is this better

the axis perpendicular to the original vector
and y axis
it rotates towards the y axis
hm there is a whole plane perpendicular to the original vector
erm yes
when you rotate you just fix 1 axis so that vectors on that axis gets mapped to itself after the rotation, so im still not sure if ur saying the axis u fix is y, or some axis perpendicular to original vector
huh i think it is working (the normalise + scale method)
its some axis perpendicular to original vector
the y axis is originally 0 and becomes non zero
neither of x y or z are fixed in this rotation
i think i see what u mean
is the axis perpendicular to original vector also flat in the y direction?
should just be $$(x,y,0)\mapsto (x \cos(t), y \cos(t), \sqrt{x^2 + y^2}\sin(t))$$ right?
same thing
perpendicular to both the original vector and the y axis
ahh, so thats the axis ull fix and so u'll do cross product of (0,1,0) and your original vector to get that axis
coycoy

hrm i did cos(t0), tan(t1), sin(t0)
let me check again
yes i said that quite a while back
urs might be different because we have different axis fixed, but it’s the same idea
and when you asked me if i can put it in a unit vector i said yes
yes
mine starts off with y = 0
its on the xz plane
yea i think coycoy made it good
ok. will start with that and check once more
except just need to reorder i think
wait it was not all the same angle
wdym
mine was if you rotate (1, 0, 0) by t0
anti clockwise by +y
and then rotate it by t1, towards y axis
i simply sent the wrong notation here
fixed
basically it would be normalising the original vector
and set y to tan(t)
normalise it again
and scale by original length
if you have $(x,0,0)$ on the x-axis, then the transformation $(x,0,0)\mapsto (x\cos(\theta_0)\cos(\theta_1),x\sin(\theta_0),x\sin(\theta_1))$ should work, where $\theta_0$ is the angle rotated counter-clockwise about +y and $\theta_1$ is the angle rotated up towards +y axis
coycoy

you can always get a vector to lie on the x-axis so to speak through the correct change of basis, so this should be sufficient.
why would it be different if i switch x and z axis
not sure what u mean by switch
eh why are x and z treated differently
they’re not really.
“mine was if you rotate (1, 0, 0) by t0”
i just went by this and rotated (x,0,0) how you wanted it to be rotated
but why would the z value be x sin theta 1
shouldnt it be lesser than that
since the vector rotated into the third dimension
the projection on xz plane should have a down scale
but remain same proportions
ie same direction
that’s because i switched up coords lol. my mistake
?
second and third coordinates should be swapped in the latex thing i posted
the problem is still the same
since my question is valid when both angles are equal
wait i think i got it
you set y to r sin
and x and z to cos * ( cos, sin )
since you scale both x and z by the new triangles adjacent
🤔
while the y is the opposite
so if t0 is the angle along y axis
and t1 is angle towards y axis
it would be
r cos t1 cos t0
r sin t1
r cos t1 sin t0
x
y
z
because intuitively x and z should have similar notations
since they are affected by both t0 and t1
my bad. i had forgot to adjust again the z coord again. just checked and what you have is the same as what i got now
everything is trivial after it’s been solved
you just scale x and z by cos t1
wait if so
it is a rotational matrix of some kind
we are rotating a vector. isn’t that expected?
now need to find general formula
hi

Is this a mistake in my textbook?>
Shouldn't the length of the vector X be:
Tim O'Brien


yes
Ah ok
second page of the book
there is alre3ady a mistakje
awesome @solid siren
hard to tell what the arrow is pointing at tho
you can see its coords
so if I have an n-dimensional vector, with n different coordinate points
I will have that n-amount of coords. squared under the square root
added to each other
under the sqrt
?
ok yeah the book sasy that nvm,
meant the arrow with sqrt(x_1^2+x_2^2)
could be pointing to the vector on the bottom, the base of the triangle formed by (x1,x2,x3). but looks like it’s just a mistake
there’s probably an erratum online
libgen
When you have a linear system of equations, if the coefficient matrix is invertable, then the lines intersect, right?
Each equation only defines a line in the 2x2 case
Assume we have the 2x2 case.
Then that is correct
nice ty
I need someone's opinion; perhaps I'm overthinking this question.
I have an nxn matrix A where the ith row of A is given by t u + kv, where u and v are row vectors and k and t are scalars.
The question?
if A is invertible in Ax=b, you have a unique solution, yes
I'm sorry, I was typing it up in LaTeX to make it easier to read.
I realized quickly that I wasn't going to be able to convey it well.

where u and v are row vectors.
My idea is that this should follow pretty quickly from this theorem in my textbook:

Thank you, Mosh.
But that feels. . . cheaty?
If you already have the theorem, then yes this follows almost immediately. Not using the theorem would just be proving the same thing twice.
Are there intermediate steps that I'm missing? I can't see any reason for not applying the theorem and going straight to my intended result.
Yes, just apply theorem
But you kind of have to apply it twice
Once for the k and once for the t
Oh, well I did not think of that.
So, if I'm understanding you correctly, I can apply the theorem once directly and have one determinant in terms of tu and the other in terms of just v since I've already removed the coefficient.
From there, I could express tu as 0 + tu, then expand that and show that the first determinant is 0?
(I understand you're not my professor and I thank you a ton for your help. I'm just trying to see if I understand your point.)
r u done?
Yeah, sounds good
Np u2
Alright so

So if we have these three vectors
And with a fourth vector, it will form a quadrilateral
Wouldn't the third vector just be the sum of all three?
You add up each vector, and you get 3 sides. The fourth side is the vector that goes from the origin to the tip
of these three added
thats my idea but im not sure
I struggling :(
Or, would it be the sum of these three
and the 4th vector
is what makes that sum equal the 0 vector?
so it goes around all the way basically?
Idk im really lost
These vectors don't represent the sides of your parallelogram. These are the position vectors from the origin of the vertices.
So it's not the vector that points from one vertex to the next
It's basically the coordinates of the vertices
Disguised affine space questions lmao
ok wait let me try to solve this one
I can do iot
it
hmmm
I can't do it
Ughhhhhhhhhh
so a paralellogram has 2 pairs of equal sides
maybe I can do somethign with that
it's just so hard when it's 3d
Well, you can try to use these vertices' position vectors to find the vectors representing the sides.
That could help.
It is known.
So what vector could I add to one of vertices to get another one
and that's one of my sides
if I add up the 4 sides, I get to the 0 vector
right
And remember, if you take the difference between two vertices on opposite corners, you won't get a side but a diagonal.
Try to see how you would do it in R^2 if you can't figure it out, so you can apply the same ideas
@edgy grail When I've found the values for t and s, is simply finding the point of intersection enough to determine if the line segments intersect or should I also see if that point of intersection falls within the bounds of the line segments? I'm thinking I need to see if the point is in bounds but I can't really explain my thinking.
I can give more context if someone else wants to help or you can't remember what we were talking about.
Side note: does anyone have an example of a 2x2 non-invertible matrix?
@dusky blaze
$\begin{bmatrix}0 &0 \ 0 &0 \end{bmatrix}$
$\begin{bmatrix}a & b \ a &b\end{bmatrix}$
ninnymonger

Ok
It took me a little while
But I got a solution




Hey can someone help me solve this problem?
please its due really soon and im stressing sm
just use the definitions, it's not so difficult
look for stuff that is linearly dependent/independent
hey can anyone explain the difference between transformations and operators and there effects on vectors
is it right to say that transformations change vector components and operators change tha vectors??
like transformations change basis and operators change vectors in the same basis?
"transformation" and "operator" are largely synonymous
some authors reserve "operator" to mean "linear transformation from a space to itself"
some authors say ann is largely tteppa
what does "changing basis of a transformation" mean?
nothing, it sounds like minced wording

the matrix of T with respect to B
Not with respect to B, I think
er
thats what i meant changing basis of the operator before
yeah my bad sorry
🥲
oke
so what is this A matrix?

can we think of it as something that transforms the object
like rotation matrix
i read that transformations dont change the vectors
but the components
Are you unfamiliar with the concept that linear transformations can be represented by matrices? And that every matrix represents a linear transformation?
yes
Because if you are, you should not be looking at this theorem
You need to go back and read about that
thanks
if i have an R^3 vector and the three angles it makes with the axis as well as it's magnitude
how do i quickly figure out it's coordinates?
i could probably do trig and figure it out but
is there a general formula
i know x is cos * magnitude
y is sin * magnitude
what about z? 
you've only used one of your angles to get x and y
yeah that'll work
like you worked out though, you only need 2 angles to do this, the 3rd is redundant
Is there a mathematical formula for a gauss sum of gauss sums like this? 1+(1+2)+(1+2+3)+(1+2+3+4)+...+(1+2+3+...x)
not quite the right channel, but that's not too complicated
there's an easy formula for each one of those terms, which is a polynomial
and the sum of n or n² from n=1 to x has similarly easy formulas
$\sum_{i=1}^x 1 +\sum_{i=1}^{x-1} 2+ ... + x$
Mosh

Is this the fastest/most efficient way of computing the cross product of 2 vectors?

I think so, but there can be faster ways if you happen to know more about them beforehand
$a\cross b =det\left(\begin{bmatrix}i&j&k \ a_x&a_y&a_z \ b_x&b_y&b_z\end{bmatrix}\right)$
Mosh


struggling to articulate my argument for this one
wait no i've been misreading the question
brilliant
Want to try first now that you read it correctly?
yes
for some reason i read it and thought 'w1, ..., wn a fixed basis for W, prove there exist v1, ..., vm such'
which is probably harder now i think about it
and/or false
wait, no
wait
that's just the next exercise, ok
so it's not false
but anyway
lmao
when you add complex numbers you add the real and imaginary parts component wise
maybe a bit trivial but idh answers to this

basically need to classify if subspace or not
would it be correct to say all three are?
here's my logic, null can be satisfied in all
for (i), addition & scalar multip works as we can adjust the other three vectors to match
(ii) same story, also considering we can leverage negative numbers
you should check (ii) and (iii) again.
you need to actually write out and verify that the definition of a subspace holds/fails in each case
just use the fact that Det(MN) = Det(M)Det(N) and that a transpose had the same determinant as the original
over and over again
can't a be 0 and then b be 1? thus 0 is element of the subspace
no
why not
by 0 i mean the vector (0, 0, 0, 0)
the zero vector of V
a subspace of V must contain this vector
can 1 be [1,0,0,0]
no, 1 is a scalar. leave it at that
okay noted
so then you can't even add two vecs to get a scalar
so subspace laws fail
okay
then why can't a = -1 and b = 2
i don't follow
OHH
because a and b must both be 0
to satisfy the 0 vector
got it
Do all 0 vectors in a subspace need to be of the same dimension as the 0 vectors of the vector space?
the zero vector in the subspace has to be the exact same zero vector as that of the parent space
so yeah
(note that there's only one zero vector, always)
for iii) a^2 = b^2
I'd say it satisfies 0_v, and the subspace test
not sure where I'm going wrong
does it satisfy the subspace test though?
let's see hmm
show a + lambda b in U
a + lambda b in R, so let this equal to a, for all a^2 there exists 2 values of b for b^2 given a nonzero
no?
so it does satisfy
i don't understand what you're doing
what are a and b here?
if we test with a restriction, eg. a^2 = b^2
subspace test is that
0 in the space
linear combination of elements is in the space
seth i think you might be getting mixed up because of your notation
for the subspace test you wanna check that a + lambda b is in U whenever a and b are in U. but you're already using a, b, etc to denote the coordinates of the elements of U
ah
so if x = (a, b, c, d) and y = (e, f, g, h) are elements of U, and lambda is a scalar, you want to check that x + lambda y is in U. what would that entail?
no you can't square a vector. you mean its first two entries, right?
yep
yeah
and you want to check that those are equal
knowing that a^2 = b^2 and e^2 = f^2
are they?
no
right, not always
yes if everything is 0
or some other special case
but in the whole no
so SS2-3 fail
alright got it, thank you for your help

it's a matrix that's similar to a diagonal one
more transparently, it's a matrix that represents a linear operator which becomes diagonal with respect to some basis
is it a identity matrix but that has the same number instead of 0?
not sure what you mean
you should probably hold off on understanding diagonalizability until yhen
I need it for a proof tho
diagonal matrix is 0's off the diagonal, not 0's on the diagonal
so what’s the difference between that and the identity matrix
is it just a non square identity matrix?
the identity matrix is diagonal, but not every diagonal matrix is the identity (eg zero matrix)
hmm
typically one only speaks of diagonal matrices that are square
can the diagonals be anything non zero?
of course
and be different for each row
definitely
okay got it
1 0
0 3
Diagonal 2x3 matrix 
so basically a generalised identity matrix but the diagonals can be anything and different
can one of the diagonals be 0 and the rest nonzero?
or all must be nonzero
many
diagonalizability is a fun topic
very important too
the whole point is that we might have some super complicated looking matrix, but we might be able to turn it into a very simple kind of matrix. diagonal matrices are very simple
i was just asking because of this

then is the zero matrix a diagonal matrix, or not really
a diagonal matrix is just one whose entries off the main diagonal all vanish
(vanish means equals 0)
and yes, your answer to this is correct
(assuming n > 1, since if n = 1 things are kind of silly)
what's the difference
which comes first, the chicken or the egg 
what's the difference between a scalar and a 1x1 matrix?
not really anything
trivially the egg due to genetic theory ig
ah okay fair
in practice everyone just pretends 1x1 matrices and scalars are the exact same thing
no problem
what's the method for solving this

laplace expand?
I think what you can do is replace the first collumn with the sum of the three collumns, then you can take out that factor
yeah but how would you arrive to this
What do you mean?
how did you know that's what you're supposed to do just by looking
ok so once i have the det of the matrix?
It is a kind of standard trick i guess if you ever notice the row sums/collumn sums are equal. The question came with a hint of x+2y too
can you explain what you mean by taking out that factor?
the first column just becomes x+2y, x+2y, x+2y
after you sum and replace
then what
Correct, now the factor of (x+2y) comes out of the determinant and that column becomes all 1’s
are you sure about it being all 1s?
this is the supposed correct answer


how do you go from that 3rd step to the second to last?
how did the det get to that
I subtract the first row from the second and third rows
That is, replace row2 by row2-row1 and similarly replace row3 by row3-row1
sorry if its a dumb question but why is that necessary
That just makes life simpler, now the first column has only one nonzero entry so finding the determinant is now super easy by expanding along it. (Or another way you can get the determinant is that now the matrix is triangular so the determinant is the product of the entries on the diagonal)
It isn’t really necessary, you can probably expand the determinant at the third step as well, it would just be a little messier probably
question, if you do laplace expansion on the original determinant you'd end up with the final expression for it anyways right?
Yes, but there is a catch: it won’t factor x+2y out for you, so you’ll have to do some polynomial division on whatever expression you get for the determinant
But yeah, it will be the same
alright, thanks
i think i understand although i'm still iffy on where this operation comes from
I did that operation to kill off the 1’s on the first column

hey i'm sure this is a stupid question, but i dont see how matrix dimension match in eq 4.2.5
U_A has a size mxm
D_A has a size kxk
Z has a size kxn
but in the formula it's not only D_A but its a block matrix containing D_A, hence the number of rows is greater than k


you're correct, thank you
The number of columns match, you just need more rows
np
can we say a line is a subspace of R^2
@maiden rock only if line passes through (0,0)
that is set of vectors {(x,1)}
(x,1)-(x,1)=0 but 0 is not in {(x,1)}
yes
but line would also be
and a line inside that plane passing through the origin is a subsubspace
subsubspace has no meaning
L <= P <= V
i mean like you can speak about subspace of subspace but it reduces to being just subspace of original space
a line going through the origin in R^3 is a subspace
V is a subspace iff a linear combinaison of element of V are still in V
i always refer to that definition when im asking myself this kind of question
Im pretty sure their question was more just making sure they understood linear subspaces, since they were doing subspace/naive test the other day'

{kind=link}
not invertible
one solution: ||any non-invertible diagonal matrix with integer diagonals||
that was what i was thinking just pick any diagonal matrix that is non invertible
Heyo, for my highschool graduation project im making a program that renders cross-sections of 4d objects using raymarching. It works right now, but only if my cross-section is perfectly flat, which yields quite uninteresting results, hence my question: How would I go about rotating vectors in 4 dimensions?
in which the following would be given: (x,y,z,w) for a vector, and the (x, y, z, w1, w2, w3) rotation of the object im looking at
What are the w1, w2, and w3 for? For 4D, you choose a plane and put cos(x) and sin(x) in front of the two components you want to rotate. So like, to rotate the vector 20 degrees in the w-z plane you do (x,y,z,w) -> (x,y,zsin(20),wcos(20))
Can anyone help me start this proof?

im not sure where to begin
This is the theorem, because using this would make the problem trivial

so im not sure where to begin for this or even how to approach it
take the eigen vector v associated to the eval lambda. you have Av = lambda v so A^2 v = lambda^2 v.
now (A^2 - 2I)v =…
👍
Thank you.
I think that I can tell if a point a(t) is on the line segment if
x0 <= x value of a(t) <= x1
where x0 and x1 are the x values of the endpoints of the line segment defined by a(t).
Is this true? Is this enough?
What do you call it when you multiply a matrix by a number?
Like
n * [1 2]
[3 4]
What do you call n? Is that a scalar? A constant? Something else?
scalar, field element
Thank you.
For what values of the parameter
tis this the case?
I think this is the case for the values0 <= t <= 1. These are the values oftthat describe the points on the line segmenta(t).
Is the same true forb(s)?
I think this is true for the values0 <= s <= 1. These are the values ofsthat describe the points on the line segmentb(s).
Putting it all together, after solving the matrix equation, how do you determine if the line segments intersect?
I think that if0 <= t <= 1and0 <= s <= 1, then the line segments intersect. I don't think that I need to calculate the intersection point.
Thank you for all of your help with this.
i know this is kind of a broad question but why do linear transformations have so much applications in economics, physics and other real world phenomena
i get the mechanics of linear transformations but im trying to piece it together with why they are so important
a lot of operations are linear, like rotations, translations, differentiation, integration, etc., or can be approximated by linear ones (like by taylor expansion)
that helps, thanks
Translation is not linear, I believe.
you can make it linear if you use homogeneous coordinates, kind of a cute hack
oh yeah sorry not in the usual sense of x -> x+a, I was thinking of translation on functions
like Tf(x) = f(x+a)
but then got it mixed up
since the word translations goes with rotations but also I remember the translation operator on functions being a linear operator
Morning #linear-algebra
given a vector space V with basis $\beta = \left{ v_1 , v_2, \ldots , v_n \right}$
have you guys ever seen the basis of the dual written as follows??
$$\beta^{\star} = \left{ v^1 , v^2, \ldots, v^n \right}? $$
I've seen it when looking up english resources on the subject
ninnymonger
Morning #linear-algebra
given a vector space V with basis $\beta = \left\{ v_1 , v_2, \ldots , v_n \right\}$
have you guys ever seen the basis of the dual written as follows??
$$\beta^{\star} = \left\{ v^1 , v^2, \ldots, v^n \right\}? $$
```Compilation error:```! You can't use `macro parameter character #' in horizontal mode.
l.56 Morning #
linear-algebra
Sorry, but I'm not programmed to handle this case;
I'll just pretend that you didn't ask for it.
If you're in the wrong mode, you might be able to
return to the right one by typing `I}' or `I$' or `I\par'.
LaTeX Font Info: Calculating math sizes for size <14> on input line 58.
LaTeX Font Info: Trying to load font information for U+msa on input line 58.```
yeah, it's typical, goes well with tensor index notation
$v^iv_j=\delta^i_j$ for instance
Merosity

However, in class we just wrote the dual basis of $B = {e_1,\ldots,e_n}$ as $B^* = {e_1^,\ldots,e_ n^}$
Syst3ms

so there's no confusion that this is exponentiation? cuz that wouldn't make sense in linear-algebra context?
well, it could, but i guess it's left up to context
I mean, usually you know whether f²(x)=f(x)^2 or f(f(x))
is this the kronecker delta? i've not seen it written that way before.
(bear in mind that in the case of linear maps, u²(x) usually means u(u(x)))
yes it is
Syst3ms

oh that's neat. i like that notation.
yeah, me too. the times ive seen it are $\delta_{ij}$ also .
ninnymonger

ShiN

tensor notation is for physicists
well location of indices matters
lower indices are covariant, upper indices are contravariant
you can index juggle with the metric tensor, so it wouldn't be delta_{ij} generically speaking
i've seen that language only once. i'm used to seeing covectors called one-forms or linear-functionals.
^re: covariant and contravariant.
well you just said you've only just seen upper indices for your first time
so you're just inexperienced, that's ok
4 nuts
differential geometry is pretty notorious for having a lot of different notation
lovely haha
don't interrupt the discussion for random stuff plz