#linear-algebra
2 messages · Page 214 of 1
if i wanted to use it then i wouldnt have asked for help with understanding the process
you'll see it in class eventually
it involves a long talk about subspaces of a matrix and whatnot
right now all you need is a vector projection
i.e. the vector projection of a onto b is (a dot b) in the direction of b

how do i go about approaching this problem
its not an exam or anyhting
this is hw
like how would i foil the (3u-v)^2
im not sure how to deal with it because of the normalizing around the 3u-v
what are u and v? vectors in a fin dim space?
oh it says it there
the norm you have there is the same as taking u dot u
and also equivalent to u^T u
for some vector u in R^n
you can do the same for a difference of vectors
e.g. $\Vert 3u - v \Vert^2 = (3u - v)^\text{T}(3u - v)$
Edd

you can distribute the transpose and then foil your heart away
keeping in mind that all u^T v are the same as u dot v
hmm?
ah, you can convince yourself on a piece of paper by writing it as a sum
write out what u dot v is
then do u^T v
and convince yourself they're the same thing
Should i even be foiling?
cause i feel like i should be foiling so that i find a term in there that shows u dot v is 0
how else would you multiply (3u^T - v^T) (3u - v)?
not for that portion but for the proof over all
i think it'll become clear after you do it
okay
how do you check if 2 vectors are orthogonal? just keep that in mind
If i have two vectors instead of just one, would it still be A A^T?
yes, but A is now a matrix, not a vector
but its from an old assignment and it says specifically Matrix projection and not vector projection
you can find what this matrix is by doing the vector projections and then grouping terms, same as before
i think you should really go back several lessons and review the definitions
i think i should too
you will get an orthogonal projection matrix, yes, and what it does is perform an orthogonal projection. an ortho projection is a decomposition of a vector into orthogonal components. this decomposition is done via vector projections onto an orthogonal basis
take the operations and associate them nicely, and you get the matrix that does them
Thank you i figured it out
notice i used a plural here. the projection matrix will do the work of several vector projections

Can I get help on this problem

rewrite vectors as linear combos of e_1 & e_2 then use the linearity of T
ie if $x=ae_1+be_2$ for some scalars $a,b$ then $$T(x)=T(ae_1+be_2)=aT(e_1)+bT(e_2)$$
RokabeJintaro

I'm still having trouble understanding
Would I set e1 equal to y1 and e2 equal to y2?
not sure what you mean
I think you can use the matrix associated to the linear map, you'd just need to multiply the vector to the matrix
T(e1) = y1, this is what they told you
unpack what T being linear means
someone correct me if im wrong
yes jackieto, that's right
So would I make an augmented matrix with e1 and y1?
you make the matrix with the images, in this case y1 and y2
there is no need to write any augmented matrices
So would I make a matrix like this?

yes
And then what would I do?
do you understand why jackieto told you to write this matrix?
No
this matrix represents the information you were given
i.e. that T(e1) = y1, and T(e2) = y2
multiplication of a matrix by a vector yields a linear combination of the matrix's columns
and the coefficients of that linear combination are the entries of the vector. multiplying a matrix M by e1 (the vector [1 0]) gives you the first column of the matrix M
so if M e1 = y1, that means y1 is the first column of M
similarly for y2
now follow rokabe's tip on decomposing the other vectors into linear combinations of e1 and e2, and use the linearity of T and M
I'm having trouble understanding rokabe's tips
anyone idea?

Vandermonde back at it again
Why is the Notation for row operations do weird
Instead of R_1->R_1-2R_2 it is R_1-2R_2->R_1
put this combination of rows into this row makes more sense?
Just do C_2->C_2- C_1 ,C_3->C_3-C_1, C_4->C_4-C_1
Factorise the required factors and repeat
aim to triangular matrix ?
i dont quite understand yet, how do you continue from here?

Take (y-x) out of 2nd column
(z-x) out of 3 rd column and so on
Now you will have a bunch of 1s
to calculate the intersection of 2 subspaces and 2 basis, can I do that by slapping all the vectors in a unique basis and checking and deleting the linearly depending ones?
Are you considering basis of the 2 subspaces?
yes
@native rampartthanks
yeah im aware of that. just wanted to see if there was a "gold standard" for linear algebra, much like how baby rudin is considered a standard for undergrad analysis

the basis of C2 above R is 4, and C3 above R is 5 ... right?
oh right my bad
Does anyone know how to do this? Im not sure of my answer. I got
0 2 1
0 -1 2
3 1 1

say you make matrices M_T and M_S, which have the corresponding basis vectors as columns
the change of basis mat should be M_S^-1 M_T
,w {{2,1,1},{0,2,1},{1,0,1}}^-1 {{6,4,5},{3,-1,5},{3,3,2}}

I have to compute the inverse of S and then multiply it by T?
On a problem like this, how would I find if x is unique?

Ax=b has a unique solution iff A is invertible
that's one of the equivalences of FTIM
Would it also be unique if there is a pivot in each column?
it'd be unique if RREF of A is I
I have a linear map f: R^3->R^4, in which space are the dimensions of the kernel and the image based?
For example, theres a theorem that says Dim(V) = Dim(Ker(f)) + Dim(Im(f)), is V R^3 in this case?
yes
the precise theorem goes: if f: V -> W is a linear map, and V is finite dimensional, then dim V = dim ker f + dim im f
i need to find a basis for the space of 2 x 2 matrices with real entries that have eigen vector (1,-3). any thoughts on how to proceed? i have done a couple of things to start but nothing has really helped much
Probably first find the space of matrices that contain (1,-3) in their null space and then modify that by adding I to the basis of that space
ill try that. why do you think that will work?
I did it differently, I put A=[a,b;c,d] then multiplied by the eigenvector and got two equations for the eigenvalue and eliminated it leaving me just with a relationship between the entries of A. From there I had the basis expansion since all 3 were linearly independent and we know it's not 4 dimensional because then we'd easily be able to make a matrix without that eigenvector
makes sense, in general for a vector in R^n the space of matrices that have it as eigenvalue is of dimension n(n-1)+1
ooh that's neat
this was my initial approach. i had the relationship between the entries and eliminated, but you lost me at basis expansion
solve for one of the variables and plug it into the matrix
then you can expand it as a sum of matrices with the entries as variable coefficients
@teal grotto
ok. thanks guys. ill try out both of these approaches
I have a simple question: if I have two linear transformations whose null spaces are equal, am I right to state that they have the same nullity because their null spaces are equal?
I believe so yea
Ok thank you @faint lintel
yes because if two sub spaces are equal then they have the same dimension
@teal grotto Thank you very much that makes sense.
does a vector space have a certain set of scalars that can be used, or can all scalars in $\mathbb{R}^n$ always be used?
light

depends on your basis vectors
if your basis is the vector of all 1s
then all you can do is create vectors where each entry is the same
@hollow latch
ah thanks
how does covector and matrix multiplication work?
you mean covector times matrix?
that's what i was gonna say
Hi, quick doubt:
I always saw the definition of a Linear System like y = L(x), where L is a linear operator, etc... Fine. We could have our input-output relationship as y = d(x) /dt, for example.
Today I saw on some lecture notes the definition of a Linear System as:
L_1(y) = L_2(x)
PS: L_1 and L_2 are linear operators, y is the o/p and x the i/p.
Question: why the Linear Operator L_1 on the output? I mean, wouldn't L_2(x) directly imply a linear system?
do "o/p" and "i/p" stand for output and input respectively
also i'm assuming this is in the context of control theory?
the output isnt always directly affected by the input
if it is, you'll have L1 be the identity operator
but for example you could have a driven harmonic oscillator system
then you could describe it as $\ddot{y} + \omega^2 y = kx$, where $x$ is the driving force, $y$ is the position of the oscillator and $k$ and $\omega$ are constants required to make this equation make physical sense
Ann

in this case, y doesnt appear on its own but rather passed through the operator D^2 + ω^2 I
@blazing bear hope this helps shed some light on your doubt
Oooh, I got it.
The reason for me usually seeing y alone was because I was assuming "direct effect" from input on the output haha. But to be precise, there was actually an L1 there as an identity operator. Implicitly.
In your example, the solution y indeeds goes through those operators, whereas our forcing function doesn't (well, at least not through those ones)
Damn, how did I never thought about seeing it this way haha
Like, more general, you know?
It surely did. Thank you a lot.
Let θ be the angle between the vector A = (-2, -6, 1), and B = (2, 6, -1)
What's the measure of theta?
I was never taught this, how do I approach it?
i can visualise it and reason through it but that's pretty taxing and takes a while
is there a way to compute it
i assume it is to do with the dot product..
it has to do with the dot product indeed
there is a geometric definition for it that involves norms and a cosine
you mean |A| * |B| * cos(theta)?
indeed
so i can just solve for theta using arccos, no?
yep
alright thanks 
i hadn't considered that specific form of the dot product
ugh i hate needing to calculate 3D magnitues

what :(
sqrt(x^2 + y^2 + z^2)?
i know how to do it, the formula is just cumbersome and long when i have to also calculate other stuff with it

do this in the bots channel tho
if only i had access to wolframAlpha at exams :^)
are you using a programmable calc or a simple one?
oh yeah wait my calc can do norm
yep, just in different ways depending on the type of calc
but most of the recent high school ones, even non programmable, have fancy matrix features

idk how to present it as system of equations
0 = x2
a = x3
3b -a = x4
b = x5```I've tried something like that and then tried to solve it with matrix
<@&286206848099549185>
let U,V vector spacecs, how can I compute U+V?
if you have basis for both, u can join the basis together and u get a generator for U+V
if the basis are finite u can reduce it to a basis of U+V using the well known algorithm to do that
Does anyone know how to do (c)?

try using (a) and (b)
Idk how to find it
Do you know?
Is it if dim(ker)+dim(range)=dim(T) then its one to one and onto?
"dim(T)"?
injective on finite dimensional implies surjective
I don’t understand?
Just if the dimensions of vector spaces are the same
its injective if ker is trivial that means it contains just 0 and Surjective if dim(im(T))=rank(T)=dim(R^3)
Okay thanks 👍🏻
@wintry steppe please don't post across servers. also you were already answered
they're posting across servers?
in hwh
How to solve question like this ?

think about the definitions of everything involved
ker(T) consists of all vectors v such that Tv = 0
ker(ST) consists of all vectors v such that STv = 0
is it true that for every vector v in V, if Tv = 0, then STv = 0?
why guess?
you should know what happens when you pass zero as input to a linear transformation.
where does any linear transformation send zero?
that's right.
now look at this again
is it true that for every vector v in V, if Tv = 0, then STv = 0?
notice that i am suppressing parentheses here as (ST)v is the same as S(Tv)
is this a "pick one" question?
you should be able to at least formulate all of these statements the way i just did
yea its a pick one
and yea i get it now
btw could you say anything about the third and forth ?
you could say that neither #3 nor #4 are necessarily true
is this count as T: V->V ?
@rose umbra the domain is the set of polynomials with deg=<2, the codomain is the set of real pairs
it should be then impossible to create one to one transformation ?
why?
well there is not tranformation matrix ,right?
assuming T(x) = (0,1) how would you present (0,1) with the basis of R2[x]
the domain is the set of polynomials with deg=<2, the codomain is the set of real pairs
these are finite dimensional vector spaces, so if T is linear then T has a matrix representation. but there's no need to think in terms of matrices
@gray dust
or T(x^2) doesnt matter
x^2 is like (0,0,1)?
so assuming i want to get the transfomation matrix ,since its T:R_2[x]->R2 i will have to say that {1,x,x^2} is like span{(1,0,0),(0,1,0),(0,0,1)}?
there's no need to think in terms of matrices
we can use rank-nullity to show that nullity(T)!=0, thus T isn't injective
I have a question which assuming this transformation and I have to pick up which statement is true
if you want the matrix representation of T, then you need to know what T does to basis vectors
yea assuming

is this true?
so then your matrix representation of T is those output vectors as columns
in the order of the input basis
how did you get it?
in order to find the matrix representation , I need to "build" the output vectors using the standard basis right?
$T[(f)_{B}]=\begin{bmatrix}2&0&2\3&1&2\end{bmatrix}(f)_B$
Mosh

where ()_B represents the co-ordinate vector of the function in R_2[x] wrt the basis B={1,x,x^2}
yea but lets say for example it would be B{3, -2x , 2x^2}
how would you then get the matrix represenation?
assuming T(3) , T(-2x) and T(2x^2) have the same output respectively as here
$T(3)=3T(1)=3[2,3]=[6,9]$
Mosh

then it'd be the same matrix, just the basis would be different
and thus the co-ordinate vectors of the functions
ty
What is the best linear algebra book for complete beginners
How would I find if a transformation is bijective? I know that I should check if the columns are linearly independent for one-to-one

T is bijective iff T is injective and surjective
How do I find if its injective and surjective?
check if the ker(T)={0} and im(T)=R^2
both of which can be answered from whether the matrix representation is invertible or not
What does "ker(T)={0} and im(T)=R^2" mean?
kernel is just the 0 vector, image is all of the output space
anyone
So would the problem that I posted be bijective?
I believe so
@frosty vapor help I can't compute JCF
I have a matrix $\begin{bmatrix}3&1\-1&1\end{bmatrix}$
Seasons of Light and Darkness

It has one eigenvalue, 2
So we should have $A=P\begin{bmatrix}2&1\0&2\end{bmatrix}P^{-1}$
Seasons of Light and Darkness

Then we have $P=\begin{bmatrix}p_1&p_2\end{bmatrix}$ and we know that $(A-2I)p_2=p_1$ and $(A-2I)p_1=0$ so $(A-2I)^2p_2=0$ so first we find $A-2I=\begin{bmatrix}1&1\-1&-1\end{bmatrix}$ so $(A-2I)^2=\begin{bmatrix}0&0\1&1\end{bmatrix}$
Seasons of Light and Darkness

Now, this is where I begin to diverge from W|A
They pick $p_2=\begin{bmatrix}-1\0\end{bmatrix}$ whereas I picked $p_2=\begin{bmatrix}1\0\end{bmatrix}$
Seasons of Light and Darkness

Why do they choose the negative one
For my choice of $p_2=\begin{bmatrix}1\0\end{bmatrix}$ if you work everything out it does not give the correct $P$ because you get $A\neq PJP^{-1}$
Seasons of Light and Darkness

So like I understand that it is wrong
But I don't understand why they chose p2 the way they did
hmm
firstly
squaring the 1 1 -1 -1 should give zero matrix
in which case you can choose any generalized eigenvector p2
Wait it does
and you can indeed choose p2 to be 1 0
in which case p1 will be 1 -1
Yes this is what I did
So you have $P=\begin{bmatrix}1&1\-1&0\end{bmatrix}$ and $P^{-1}=\begin{bmatrix}0&1\-1&1\end{bmatrix}$ right
Seasons of Light and Darkness


Yes I did
You swap their locations and then take the negative
Right
Or do they remain in place

$P^{-1}=\begin{bmatrix}0&-1\1&1\end{bmatrix}$
Metalmonomorphism beamerslides++

omfg that emote
JCF 💀
love jcf
jcf is good for you
wait is the kernel to the image (?) as the domain is to the codomain
no
umm sorry i erased all of the lin alg vocab
from my brain
whats the kernel again
things that are sent to 0
How do u find A as a linear combination of u and v using this diagram

the diagram shows how many steps in the direction of u (& that of v) we need to reach a

Two finite-dimensional vector spaces over F are isomorphic iff they have the same dimension.
To prove the direction where we assume that they have the same dimension, can we just define a specific linear map T in L(V,W) as follows: Tv_1 = w_1, Tv_2 = w_2, ... for each v in V?
For each basis vector of V I meant.
Yes
Yup then you can Continue it Linear
And for the other direction you can prove with dimension theorem if dimV<dimW that They cant be an isomorphism cuz linear maps are either not injective or surjective
guys i have an exam in 2 days and i need to know how to determine the dimension and a base of the inverse image of a linear transformation relative to an eigenspace i found
Why would this statement be true?

In theorem 9.9 from Done right of Axler, I don't understand the underlined part, could anyone help thanks. It is to prove the number of different block matrices corresponding to either dimension 1 or 2 in a block upper triangular matrix under a real vector space

<@&286206848099549185>

@twilit minnow since 3 is an eigenvalue, by definition, $det(A-3I)=0$, as $Av=3v$
Otoro


well if A has an inverse, could you come up with an inverse for A^2? for A^n?
is this a test 
sample test
Literally just take B=A
no just think about it logically
if all diagonal entries are non zeroes (thats what made it invertible)
that means its square etc etc
would also not be 0 entries right?
unless theres a flaw in my logic
yes, it works
the reasoning i was going for is more general, but your argument works
@native rampart Let $U_j$ denote
the span of the basis vectors corresponding to $A_j$ . Thus $dim U_j = 1$
if $A_j$ is a 1-by-1 matrix and $dim U_j = 2$ if $A_j$ is a 2-by-2 matrix. Where $A_j$ are the block matrices on the diagonal of the matrix of T
Otoro

yup I got that part
So U is also a subspace of that
Which means all elements of U+U_m are also in U+null(p(T))^n
Because well U+ null P(T)^n is a vector space
And sum of two elements in it is also in the space
so if I got that right, since Um is a subspace of U+nullP(T)^n and obviously U is a subspace of U+nullP(T)^n, then U+U_m is a subspace of U+nullP(T)^n, because taking an element from each and summing it would be inside U+nullP(T)^n right ?
ah okay thanks, and one more question. I don't understand how does $dim nullP(T)^n=dim null P(T|U)^n+d$ proves the part where the characteristic equation of $A_m$ equals p
Otoro

its also in the same screenshot btw
how would I determine how many solutions a 4x4 coefficient matrix has?
The coefficantt matrix only has numbers in the diagonals
so you have a 4 by 4 diagonal matrix correct?
@teal grotto
ok. what are your thoughts on this?
@teal grotto
yes. every column is a pivot column. so what can you say about its rank?
What does rank mean?
its in rref form
the rank of a matrix is equivalent to how many pivot columns there are in rref. and this is pretty much in rref
Then there are 4 pivots
right. so that means it has to have infinitely many solutions.
How do we know that thoough?
this is the rank nullity theorem
I haven't learned that theoram yet, is there another theorm earlier on that tell us this?
what is your definition of having infinitely many solutions
That means that there is a free variable
where we could chose the free var to be anything we want it to be
ah. okay. was interpreting the question incorrectly
call your matrix A. since there are no free variables in the rref of A, then for each y in R^4, there is exactly one solution to Ax=y
yes. if there were a free variable, then you could have infinitely many solutions, like you said
How does this matrix rotate the vector x by an angle theta counterclockwise? I’m struggling to visualize it

try to find a formula for a point rotated counterclockwise through an arbitrary angle and see what you get
you could also just try computing the angle between x and Tx
$$\theta = \arccos \frac{\langle x, Tx\rangle}{|x||Tx|}$$
R2T2

(see if this is true)
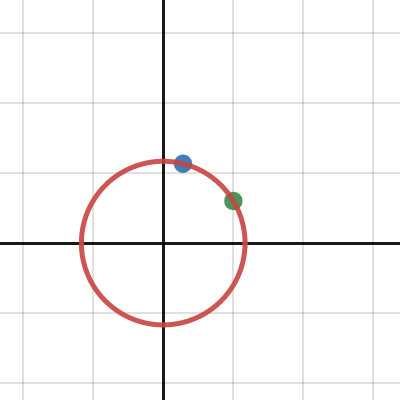
Would I do this by making a triangle and using Law of Cosines?
.
but that probably works too idk
i don't remember the law of cosines
im sure its C

because a is obviously false and im pretty sure 2I-A isnt always invertible
but can someone explain to me how its C
Why do you think it's C?
No
could you please explain then
2I-A isn't the 0 matrix guaranteed
so what does it mean by eigenvector of A corresponding to 2 is zero
It means that the nullspace of 2I-A would just be 0
which is correct? and why
Just try again
They all have to do with the invertibility of 2I-A and the fact it can't be an invertible matrix
so its not C?
No, C implies invertibility of 2I-A
"the only eigenvector" sounds a lot more correct
also, eigenvectors are usually defined to be non-zero, so i'm not sure what's going on there
maybe it meant the eigenspace?
yeah my money's on it being eigenspace
zero eigenvector wtf
any hints for this question?
get a basis for ker(A+I) and ker(A-I)
Ker just means null space
yeah we haven't learned that
Huh
um. there goes the easy way
no basis, no vector space, no subspace, no kernel
But diagonalizable?
dude what
yes
yes
bruh. you need to be able to talk about a basis if you're going to be able to talk about when a matrix is diagonal
🙁
what is your definition of diagonalizable
honestly at this point reject the course and learn the ideas on ur own lol

bro you guys are talking about multiplicity of eigen values but not bases???
i mean yeah thats what it means to be a null space, and i guess m parameters refer to the size of the basis

this is very wierd way to talk about this
😦
It's just the way the course is
I have no control
there is a course that covers that stuff but its the advanced linear algebra one
do you get penalized for using concepts like basis or w/e
i would
so, take any non-zero vector in the null space of A+I and take two linearly independent vectors in the null space of A-I
we haven't done linear independence or null space either 💀
how
just quit
rank nullity?
Hah yeah stem courses ftw
this is not basic
Mine was similar. Basis was talked about but definitely given very little screen time
so how do they expect yall to do this 
Everything else was discussed in terms of algorithms on matrices
do you have any input on how to solve this one?
Matrix algebra moment
You should go and learn and a basis in your own time, as that will give you a much better idea about vector spaces in general
honestly just quit this class and join the better one 
I will learn that content in my own time but i can't use any of it
wait, im curious now. what else have you guys covered
matrices
gaussian elimination
determinants
adjugates
systems of equations
diagonalization
invertibility
just off the top of my head
those concepts
but you haven't covered linear independence?
No
that has to be the most backwards linear algebra class ive ever heard of
You haven't heard of my LA class
Take his class and remove Gaussian elimination
And systems of equations
you haven't heard of my linear algebra class
take only gaussian matrices and determinants
You haven't heard of my linear algebra class. It was just y = mx + b
shit guys im actually laughing rn
im sorry about everybody's LA classes tho lmao. this has become one of my favorite subject areas
tbh,I don't expect my professors to know anything
Yeah LA isn't taught very well to stems. You need some proof to get a full idea
That would be too dangerous
Which is a shame because it is also likely one of the most important classes they'll take
right? its used almost everywhere
Anyone got an idea for this one? I'm actually drawing a blank
I wanted to say something about eigenvalues
what is the question again
how rank(A-I)=rank(-(I-A))=rank(I-A)=1
but idek
if u figure it out i just want some hints i want to be able to figure it out too 🙏
(A+I)x=0 will have exactly one parameter i think. (the x=(x1,x2,x3) part)
find REF of A+I and A-I
Hmm
that would have to mean that the one parameter must be multiplicity 3
to have 3 eigenvalues
This is a T/F question
if you dont have to show work, just write true
its true. sum of the dimensions of the eigen spaces of A is 3, hence diagonalizable
null(A-cI) is dimension of Eigen space with eigenvalue c
Rip 😦
what i meant was, any solution to (A+I)x=0 will have exactly 1 free variable (or parameter) because -1 is an eigen value of A with multiplicity one. (trying to bend to your first definition of diagonalizable)
ok. try to show that any solution to (A-I)x=0 will have exactly two free variables, and that 1 is an eigen value of A with multiplicity 2. and gl
bet
hey guys, if I want to check for linear independence using gaussian elimination, does it matter if I put the vectors in the matrix as columnns or rows? or only works if the vectors are as columns?
doesn't matter
the rank of a mat is the same as the rank of its transpose
you can look for this on wikipedia if you want a proof: "Proofs that column rank = row rank"
you could express the elementary matrix in terms of the canonical basis vectors, and study what happens when you multiply the matrix A by this
so, study what happens when you multiply A by canonical basis vectors from the left and from the right
(separately)
Let's say I have a bunch of Eigenvectors, can I just put them together to form a Matrix? My Prof. told us that when modeling systems you can get all kinds of matrices that are modelling the same underlying system. And by calculating the eigenvalues/vectors these matrices are connected. Now what do I get when i just put these eigenvectors back together into a matrix? Is it something special? Or is it just another matrix with the same eigenvalues, eigenvectors ?
wdym put them to form a matrix?
well under some conditions you can get representation of linear map wrt to eigenvector basis

How is it that we deleted the element a21?
I get what was done, but I didn't get why it is equivalent to the original matrix.
In case you don't get what I mean, here's the methodology to solve it:

I dont know, we can get these special numbers and vetctors from the "map", shouldnt we be able to get a special matrix from these?
they have done a step of "elimination"
they took row 1, multiplied it by -2, and added it to row 2
with the goal of getting rid of that leading 2 in the second row
I do get that, but I do not get what is the logic behind this being something valid to do.
What rule backs this property up?
Ah, the step is called Matrix Elimination.
Alright, Imma head out.
Thanks!
Very convenient name, just flew over my head.
it is valid in the setting of solving a system of equations, as you end up multiplying both sides of an equation by the same scalar, or adding something to both sides of the equation
in a more abstract setting, it preserves some properties of the matrix that are important. i'm guessing you will learn that later
this might help you out (or maybe not, i just googled random stuff)
hi would this mapping be considered linear? Its from 2x2 matrix to 2x2 matrix such that L(A) = A + conjugate(A)
I think it is but I want to double check
yes, but more is true: linear operators form a vector space
So i had this question
Prove (AB)' = B'A'
Can u please prove this by any two matrices where order of A is 3×1 and order of B is 1×3
if you're restricted to those dimensions for A and B, you can just do it by hand and show they give the same result
where?
So according to the order of a and b the order of product AB must be 3x3?
yes
Edd
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

can someone help me ?Find the spectral radius of the matrix Tj of Jacobi method for the following lineer system:
x₁-3x₃=2,
2x₁-2x₂+2x₃=1,
4x₁-3x₃=2.
what are you tasked with? constructing an example of a matrix like that?
you mean a system represented by your matrix?
okay, so then why don't you write down the RREF?
write down the rref and put asterisks or question marks or whatever in places where you don't know what the number is
$\left[\begin{array}{ccc|c} 1 & * & 0 & 0 \ 0 & 0 & 1 & * \end{array} \right]$
Ann

this is what you will get
no? why
so what if there's no pivot in the second column?
try not to get bogged down by pivots too much
this is simple
try going back to the system-of-equations view
you have three unknowns so let's call them x, y and z
and let's give those asterisks names, say c1 and c2
$\begin{cases} x + c_1y = 0 \ z = c_2 \end{cases}$
Ann

no there would not be one solution
you have less equations than unknowns, you never have a unique solution in that scenario
why do you keep pinging me at every single message
@wintry steppe isnt
@wintry steppe this
@wintry steppe annoying
@wintry steppe as
@wintry steppe shit
well annoying it was regardless of intent
anyway i cant tell you if "an under-determined system never has a unique solution" is treated as a Theorem To Be Named by any source
quick question about eigenvectors: https://cdn.discordapp.com/attachments/423244559682764800/855106503534313502/unknown.png

from -1 0 3|0 I got x_2 no problem
but im unsure how to find x_1
-x + 0y +3z = 0
so i set z = t
which means that y = 0
and x = 3 which gives me t * (3,0,1)
but i dont know how to find the other vector
do i just say y=s and the the other two lines are independant of y, therefore its just s(0,1,0) ?
yes
could you say that any time i have 2 lin independant rows and a zero in the remaining row that i will have a base vector as eigenvector?
you can choose any two values of x_3 you want for part c
if one of them is the number 2, then so be it
Ohh okay thank you
I have another question: They are asking to find a matrix D that diagonalizes Matrix A

This is from the solution

they just went ahead and made a matrix out of the 3 eigenvectors
how or why does that work?
it is based on the idea that if you have a matrix A and an eigenvector v of A, then Av = lambda v
if the matrix A is of size n x n and has n eigenvectors, you can do the same for each eigenvector
i.e. A v_i = lambda_i v_i
you can then put all the v_i as columns of another nxn matrix, call it P
then AP = PD, where D is a diagonal matrix whose diagonal elements are the lambda_i corresponding to the v_i that are the oclumns of P
then if all the eigenvectors are linearly independent and you have n of them, you can invert P
and then A = PDP^-1
oops
wait, i did something dumb there
there we go
ok imma have to think about this for a second 🙂
D is basically the matrix which has the eigenvalues on the diagonal?
yes
Hi. Is there a term for when you take a complex m x n matrix A, and replace each of the entries with the complex number's matrix representation, and get a 2m x 2n matrix?
willing to bet there's no established term for that
I have a followup question. how do i change A = PDP^-1 to isolate D?
P is invertible
because when i have AP = PD i would need the inverse of D
how do i get to the P on the right?
you want to isolate D right
yeah
apply P^-1 on both sides
A = PDP^-1 ?
but dont i have to respect some rules because its matrix multiplication?
like i can only grab things from the back
because AD is not DA
right matrix multiplication is not commutative. but if you know that X=Y, then ZX=ZY. thats all you're doing. you know that AP=PD, so P^-1 AP=P^-1 PD=D
yes because in general matrix multiplication is not commutative
AB = CD is this allows XAB = XCD
or this ABX = CDX ?
yes
nice thank you
np
but from the order it goes most right to most left right?
society if matrices commuted
ABC = A(BC) ?
one could only imagine
matrix multiplication is associative, the order matters not
no matrix multiplication is associative. you can do the multiplication in any order
sniped xd
ouch

so i can put the inverse either in the back or the front which gets me an I matrix which cancels out?
im not sure what you mean but associativity means A(BC) = (AB)C
in this example
AP = PD
i can multiply both sides with inveser of P in the back
which makes them cancel
and just leaves A
But i could also multiply both sides with inverse of A so i would have P = APD ?
A might not be invertible.
lets say its regular
i don't know what that means
its invertible
well, it's still wrong, you forgot an inverse sign on A
wait, you have AP=PD so how did you come up with P=APD? do you mean P= A^-1 PD
yes
hah nice. Thank you all. Finally makes sense 🙂
Given a matrix in echelon form, how do I know if the matrix is constient or not
@wintry steppe there is no row with zero coefficients and nonzero constant term
ok thanks
I have a question
if the rank of some matrix B is 1 does that mean it has 2 eigenvalues?
The matrix is 3x3
jeez
i can't type
since there are two parameters
must there be 2 eigenvalues?
or 1 eigenvalue multiplicity 2
I was thinking
i don't think 2 eigenvalues is possible
dunno if you've studied linear transformations, but if you think of B as a linear transformation, the image of the transformation is 1-dimensional, which means it has precisely one eigenvalue, i.e. whatever the vectors that lie on that image are multiplied by
hmm not geometric multiplicity 2
it has infinite eigenvectors, but they'd all lie on the same line
2 basic eigenvectors*
wdym by basic eigenvector
nvm
i think it'd only have one basic eigenvector
take this matrix
$$
\begin{pmatrix}
1 & 0 & 0 \
0 & 0 & 0 \
0 & 0 & 0
\end{pmatrix}
$$
Frank

which has rank-1
yeah
all eigenvectors must be of the form (x, 0, 0)
yep
it might not even have eigenvectors then if the matrix has real entries
i mean ig for a rank 1 matrix
you'd always have 0 as an eigenvalue with multiplicity 2
im so confused by this
Is it because
Yeah im not sure
I know it has two free variables
but how does the eigenvalue 1 have a multiplicity of 2??
$(A-I)x=0\implies Ax=1x$
Reaper

so clearly 1 is an eigenvalue
how are you defining multiplicity in your class
multiplicity means that any eigenvalue has 'm' basic eigenvectors
1 eigenvalue -> 2 basic eigenvectors
multiplicity is 2
usually shows in the characteristic polynomial when theres a square
(x+1)^2
well theres algebraic and geometric multiplicity
algebraic is the multiplicity in the characteristic polynomial
ok. ill try to get back to you in later im working on something else rn
ok
geometric is how many linearly independent eigenvectors the eigenvalue actually has
I really don't understand how the concepts connect
like if you have a 3x3 with a characteristic polynomial of (t-k)^3 and two linearly independent eigenvector with eigenvalue k, then you have an eigenvalue of k with algebraic multiplicity 3 and geometric multiplicity 2.
his class doesnt do linear independence. thats why i asked
^😔
you were right in your original question. rank 1 3x3 means 0 is an eigenvalue with algebraic multiplicity 2 (because nullity is 2), and you also have a nonzero eigenvalue (because rank is 1). so you have only two different eigenvalues but you will get 3 eigenvectors in this case
what role is used here?
how can you do linear algebra without linear independence
thats ridiculous
thats what we said yesterday

basic determinant rules det(AB)=det(A)det(B)
that is one rule thats being used
it is?
disregard me
nix (@ me for the love of euler)

i missed that
How do you know that 0 is an eigenvalue?
youre good
what is the A and B here?
i cant see it
$$\begin{align*}P^{-1}AP-\lambda I&=P^-1AP-\lambda P^{-1}IP\&=P^{-1}(AP-\lambda IP)\&=P^{-1}(A-\lambda I)P\end{align*}$$
coycoy
Compile Error! Click the reaction for more information.
(You may edit your message to recompile.)

vectors in the null space are eigenvectors (with eigenvalue zero). if a 3x3 has rank 1, then the rank nullity theorem tells us that the nullity is 3-1=2. so the dimension of the null space is 2, so you have two linearly independent vectors in the null space, and therefore two linearly independent eigenvectors with eigenvalue zero.
and since your teacher apparently didnt tell you, you can basically think of linear independence as not being the same or redundant. so like (1,1) and (2,2) are not linearly independent. theres a lot more to it but thats a bare bones understanding.
$Av=0$ is the same as $Av=0v$
nix (@ me for the love of euler)

😳
@wintry steppe how does your class define rank
@teal grottothx
rank is simply the number of leading ones in a matrix after gaussian elimination
I think this is beyond the scope of my course 😦
ah ok, so im guessing you didnt cover rank-nullity theorem then
better to think of it as the dimension of the column space but sure
alright
we haven't covered vectors, null space, dimension, lin independence
is this like a high school basics class or a college level into to linear algebra
its actually a second year linear algebra course
...
college level
ah rip this is a lot easier with vectors lol
second year as in into to linear part 2 or youre taking it in your second year?
yeah i think this question would be easier with those concepts
this is the first of two classes
gaussian elimination is multiplication by an invertible matrix right
hey hey
axlers is theoretical
axler slander 😠
they are equivalent
left multiplication specifically
yeah so you can use that to find the 0-eigenvectors
since rank1 means you can use gaussian elimination to get a matrix with 1 in the corner
anyone who says determinants are useless deserves constant slander /s
U a friedberg kinda person?
so we can write
$$
BE =
\begin{pmatrix}
1 & 0 & 0 \
0 & 0 & 0 \
0 & 0 & 0
\end{pmatrix}
$$
Frank

where E is an invertible matrix composed of elementary row operations
not necessarily
oh god theres two of these classes
where'd i mess up 😦
the top row could be
(1 * *)
(0 1 *)
or (0 0 1)
where * denotes an unknown entry that can be anything
the second one might be more rigorous i dont know
doesn't that mean it's rank 3
nope the second two rows would still be zero
oh i see
$\begin{bmatrix}0&0&2\0&0&6\0&0&1\end{bmatrix}$
nix (@ me for the love of euler)

for example would become the last case
the question im mainly trying to solve is If $A$ is a $3\times{3}$ matrix where $rank(A+I)=2$ and $rank(A-I)=1$ then $A$ is diagonalizable
single $ to have it be inline
Reaper

got it
the question im mainly trying to solve is If $A$ is a $3\times3$ matrix where $\rank(A+I)=2$ and $\rank(A-I)=1$ then $A$ is diagonalizable
nix (@ me for the love of euler)

lmaoo
thats a good question
wait how do you learn eigenvectors without vectors 
so when youre finding eigenvectors with eigenvalue -1 lets say, how do you do it?
dude what is a basic eigen vector
well I know what vectors are but we haven't done much with them
ah ok
lemme get the definition for u
basic i assume would mean something like, forms a basis maybe
im gonna cry. actually

ohh this is a cute question if im seeing it correctly
they dont do bases in his class
well, I would plug in for $\lambda$ then solve the system $(\lambda{I}-A)x=0$ to get the corresponding eigenvectors
Reaper

yeah. why?
theres only one parameter
righto
so we only get one eigenvector from A+I
because its rank 2
now A-I is rank 1. so how many eigenvectors do we get with eigenvalue 1?
we would get 2?
yeah!
wait buttt
thats eigenvectors
not eigenvalues
shouldn't that be looked at first?
3 basic eigenvectors => diagonalizable
look back at your notes or text if you need to for this: what is the requirement for a matrix to be diagonalizable?
any $n\times{n}$ matrix $A$ is diagonalizable if there are $n$ eigenvectors
Reaper

thats one of the theorems
exactly
well when you have two parameters you get two solution vectors
theres more technical language for that that your class has probably skipped?
but you get two linearly independent vectors in the null space of A-lambda I which means two linearly independent eigenvectors with eigenvalue lambda of A
For A to be diagonalizable then shouldn't $(\lambda{I}-A)x=0$ have 3 eigenvectors? How does that relate to $(\lambda{I}+A)x=0$ having 1 eigenvector?
Reaper

3 eigenvectors total
oh jeez
-1 has one eigenvector, 1 has two. thats 3 total
OHHHHHH
🙂
awesome!
what is the significance of quotient spaces V / U? im going through Axler's rn and he talks about quotient spaces and proves that V / null T is isomorphic to im T which is kinda cool, but in what way are these quotient spaces actually useful?
@spare crystal one example: you get to talk about affine subsets that are parallel to U
to expand, take $V=\mathbb{R}^2$ and $U=\textnormal{span}((1,1))$. Then $V/U={v+U:v\in V}$. so if we set $v=(1,0)$, then $v+U\in V/U$ is the set $v+U={v+u:u\in U}$ and geometrically, it is the line $y=1\cdot x$ shifted to the right by one unit.
coycoy

meme answer: it's a surprise tool that will help us later
explanation: I feel like you might not see the significance immediately until you come across theorems whose proofs require quotient spaces, and then you might want to come up with your own answer by extracting it from the proof. For example, there's a theorem which says that every square matrix is similar to an upper triangular matrix (over the complex numbers), and here quotient spaces are used as a means of reduction -- reducing a vector space V into two smaller vector spaces V/U and U, since dim(V/U) = dim(V) - dim(U).
ooh ok thanks for the insight! yeah it seems like an interesting concept, i'll just have to work with it a bit more and see it in action
lol there are quite a few things in linear algebra that are extremely important, but when you see them you're like "wtf is this"
quotient spaces, dual spaces come to mind
i haven't really seen much use for dual spaces other than the adjoint of a linear operator, (which is just the transpose i think?), and nothing else from the quotient spaces other than the example i provided. do you mind giving some more examples or expanding on dual/quotient spaces?
adjoint and transpose are slightly different
transpose is defined for any linear map between two vector spaces, adjoint is defined for linear operators on a vector space (so maps V -> V) and depends on a choice of inner product on V
they agree when you use the inner product to identify V with V* i believe
that said
an extremely important instance of dual spaces is in the building blocks for differential forms, which are fundamental in differential geometry
(and more generally tensors)
the first isomorphism theorem is probably the most common (and important) instance of quotient spaces
quotient spaces can be thought of as a way of "reducing" structure. i like to think of them as a way to divide out stuff you don't want
i'll give an example of that in a moment
oh, quotient spaces come up in the definition of homology/cohomology. that's incredibly important in topology
here's an example that illustrates the idea of "dividing out stuff you don't want"
R2T2 ✓

this is the linear-algebraic version of symplectic reduction
also, functional analysis
in infinite dimensions dual spaces become a lot more interesting, since then, they're never isomorphic to the original spaces
(so they're of some intrinsic interest)
this concludes my wall of text
@wintry steppe woah thanks. im gonna have to digest the omega map a bit, and review what the hell an adjoint is, but again, thanks so much

{kind=link}
{kind=link}
The proof is left as an exercise to the setter of the question
symplectic reduction :catglad:
id rather not lol. that looks kind of just... meh
idk. it just looks like not fun trying to prove that
it's easy lol
oh. wait. i actually havent thought much about it. i looked at the function and then looked at your menacing invitation/emoji, and i was like, this is probably a nightmare
the statement of part a feels a little off to me
why?
oh boy how do i describe this
also the statement of part b is nonsense
Whats wrong with my answers for part a and b?
i didn't say anything was wrong with your answers.
i said the problem is poorly phrased
so i;m trying to figure out what it actually means before reading your answers
What are you having trouble interpreting?
the eigenvalues of $A$, as displayed, would be scalars $\mu$ such that $A - \mu I$ is not invertible. NOT scalars $\lambda$ such that $A$ (which is a matrix, as constructed, which depends on $\lambda$) is not invertble. presumably they meant "let $A$ be the matrix $$\begin{pmatrix} 1 & 4 \ -2 & 1 \end{pmatrix},$$ find the scalars $\lambda$ such that $A - \lambda I$ is not invertible." (these are what eigenvalues actually are.) even worse, the given matrix isn't even of this form, so i'm not sure what happened
R2T2 ✓
