#linear-algebra
2 messages · Page 208 of 1
Are there prereqs I need to study before getting into LA?
You need to be able to solve systems of linear equations
I did that. I studied till calc 1
well its just you said you knew what fields were
so i assumed youd know of common examples of rings
but i guess not
I read about fields in the appendix
I just know it's a set of elements with + and * operations which give out a result in the same set
okay then the important takeaway is
when we talk about a vector space V over a field F
we mean that your scalars come from F
and your vectors from V
when we write something like ℝ⁴ with no further information, this typically means the vector space ℝ⁴ over the field ℝ
so your scalars are any real number
and your vectors are composed of 4 real numbers
but if we said "the space ℝ⁴ over ℚ" instead, here our vectors are unchanged
they still consist of 4 real numbers
but now our scalars have to be rational
so sqrt(3) would be a scalar in ℝ⁴ over ℝ, but not in ℝ⁴ over ℚ
(hence you can multiply by sqrt(3) in the former, but not the latter)
this actually gives rise to radically different vector space structures
Ohh 
for example, i can express ANY vector in ℝ² (over ℝ) by taking the following equation:[
a\begin{pmatrix}1\0\end{pmatrix} + b\begin{pmatrix}0\1\end{pmatrix}
] and setting $a$ and $b$ to appropriate values (this is called a ``linear combination")
Namington

but i would NOT be able to do that in ℝ² over ℚ
for example, $\begin{pmatrix}\sqrt{2}\0\end{pmatrix}$ would be impossible to express
Namington

since $\sqrt{2}$ is not a scalar and so i cannot set $a$ to it
Namington

Well do 1(√2,0)
Take that as a basis element
yes, im trying to show that ℝ² over ℚ has strictly greater dimension
sigh
the point is that ℝ² over ℚ has a fundamentally different structure
since we cant express all its vectors by just taking "linear combinations" of 2 vectors
 okayy...
okayy...
in fact, if you do the algebra, it turns out you need infinitely many vectors
(this is what i meant by "infinite dimensional" earlier)
the axiom of choice asserts the existence of such a set for any vector space, but its typically unconstructible
Oh so the set of vectors isn't bounded?
its size isnt bounded by a finite number
Ohh okayy
but again, this is different from "standard" ℝ² (over ℝ)
in ℝ² over ℝ, we only need 2 vectors

(this is known as the "standard basis"; there are many other choices of basis, but this is the simplest.)
this is mathematically important since it turns out
you can figure out EVERYTHING a linear transformation does
JUST by looking at what it does to these "basis vectors"
this makes linear transformations in ℝ² over ℝ "simple to study" comparatively
since we only need to look at what they do to 2 [linearly independent] vectors
whereas in ℝ² over ℚ, we would need to look at what they do to infinitely many vectors to fully determine them
which, as one can imagine, isnt really feasible
(the study of ℝ over ℚ is closely related to galois theory.)
(the space is so messy that you cant use the "nice" techniques of linear algebra as readily)
aside: this idea of studying transformations of a space by looking at what they do to some "generating element" (i.e. some elements you can recover the entire space from, like (1 0) (0 1) in the above examples) comes up many times in algebra
we say "homomorphisms are determined by how they act on generators"
thats beyond the level of #linear-algebra , but its important to mention
since it emphasizes that this idea is actually very deep and useful
Okay I read through it twice slowly now, and I think I get it
Can anyone help me with developing an intuitive understanding of the bra and ket in the dirac notation?
Or maybe suggest a resource which does that.
you can think of bras as being in the dual space of a vector space
and the kets are vectors in that vector space
a simple example in R^n would be to consider kets as vectors in R^n, while bras are transposed vectors in R^n
noting that the scalar product of 2 vectors v and w, v dot w, can be written also as v^T w, you could say v^T is a bra, while w is a ket
since v^T is a linear form that takes a vector w in R^n and maps it to the field R
for inner products of square integrable functions, bras would be e.g. integration of some kernel, and bras would be square integrable functions
Ann



!superficialsicko

there
That should be A*
yeah
I assume you just wrote A because it's hermitian
so close to being Hermitian though, idk
Anyway you know (A-\lambda I)v=0 implies (A-\lambda*)v=0
A is Hermitian as in the given
!superficialsicko

Yes
right, different notations
!superficialsicko

i dont follow
an alternative way would be to consider x* A x and use associativity
You know <Av,Av>=<A*v,A*v> because A is hermitian
that's a really messed up path, interesting
Then just write <Av-cv,Av-cv> and <A*v-c*v,A*v-c*v> and compare both
wouldn't <v, Av> = <Av, v> be easier?
Probably
cuz anyway the one you wrote will show lambda squared are real
But,That gives you a useful result for normal operators in general
My dumbass almost wrote but if lambda^2 is real then so is lambda.
epic i^2 moment

Ok, That just gives you the answer
Hello. How can I show that the double orthogonal complement of a finite-dimensional subspace of an inner product space is the subspace?
are you sure this is true as stated?
are you sure you want only the subspace to be findim, and not the ambient space?
let me see if i can find my functional analysis notes from last year...
showing $W \subseteq (W^{\perp})^{\perp}$ is comparatively easy if you just write out the definitions of everything (though i suspect you in particular would find this hard too)


not sure if this is what you meant by lambda squared being real
i got the first equality by writing it out as the Euclidean inner product
what cursed notation. by v_i^2 i'm guessing you meant |v_i|^2, because the v_i are complex
this, what buncho wrote, gives you the solution directly. c* = c for real c
in what you have, even after correcting the missing conjugates, you get that lambda^2 is real, which doesn't directly help you
you then have to study the relationship between lambda^2, the eigvals of A^2, and lambda, the eigvals of A
yeah, lambda could've been complex while having a real square
indeed
okay so apparently the real thing to prove here is that double orthogonal complement equals the original if your subspace is closed
from which your result will follow since all finite-dimensional subspaces of an inner product space are closed
("closed" here meaning closed in the topological sense)
Yes. Although I may not be smart enough, in my opinion, that direction is obvious, isn't it?
What does "mkay" stand for?
it's a stylized "ok"
ok
Is it possible that we do not use topological concept here?
don't think so
if it was elementary linear algebra then theyre probably assuming the ambient space to be findim too, but you did not
No, it was not assumed there.
Yes.
Its ebook?
please
stop
reply
pinging
me
every
Sorry for last pinging.
okay im done here
I did not want to ping you in the last message; I mistakenly edited it.
If I must not ping you, then how can I reply to a specific message of yours?
you can turn off the ping in a reply.
How?

Let me check.
lmao

Yes, they're independent.
but I have to show that for every sin(x) and for every cos(x).
since they're not constant.
any ideas?
my google fu says that if $a \cdot \sin(x) + b \cdot \cos(x) = 0$, then $a \cdot \sin(0) + b \cdot \cos(0) = 0$ and also $a \cdot \sin(\pi/2) + b \cdot \cos(\pi/2) = 0$
Eρρa

since the linear combination should yield the 0 function, yeah?
but from those two special cases, you can see this implies a = b = 0
fu?
Yeah, yeah.
placing special numbers to it.
I did it too.
But didn't convince me.
you know.
Just placing special numbers on it.
0 means the zero function
the definition of the 0 function is that it is 0 for any value of x
meaning a and b have to be such that a sin(x) + b cos(x) = 0 for all real x, all at once
and in particular it must be true for x=0 and for x=pi/2
what we did was show that you only get the 0 function if a and b are 0; otherwise, you get a nonzero value at at least 1 point, and then it is not a zero func
next time, @lavish jewel will throw me a big giant zero function if I'd ask sth. in terms of zero function again.
okay, but don't we have to go through all possibilities?
Okay, in that case we got. 0, 0.
that's already enough
no, nobody says we "have to" do anything
i mean, if you want to spend literal forever examining continuum-many equations that's on you
those two cases show it's impossible to get 0 from sin and cos at x = 0 and x = pi/2 if a and b are not both 0
we only needed 2 points to show that a and b have to be zero for the result to be 0 at those specific points
if a and b are not both 0, then you have a counter example to a sin (x) + b cos (x) = 0, and none of the following analysis matters
okay. got it.
cuz you couldn't even apply the definition of linear independence to this in that case
yeah.
and everything is fucked
tteppann
if an n-by-n matrix A is Hermitian, then how do i prove that eigvectors corresponding to distinct eigvals are orthogonal relative to the Euclidean inner product?
say x1,...,xn and y1,...,yn are the respective coordinates of arbitrary eigvectors x and y corresponding to distinct eigvals
take two eigenvectors u, v with different eigenvalues and look at $u^\dagger A v$
Meρρa

i came up with <x,y> = sum_{k=1}^n x_k\overline{y_k} at the end
you can evaluate it in two different ways
hm, idk what $u^\dagger A v$ is
!superficialsicko

conjugate transpose
i did it using the basis of C^{nx1} though
take the complex conjugate of the entries and transpose it, just one of many notations to represent this, it's not too serious
u is a column vector
it's an eigenvector of A
for any two distinct vectors in the basis of C^{nx1} = V, the image under f (Euclidean inner product) is always 0
but <v,v> for any v in the basis of V is always equal to 1
i meant for any two distinct vectors in the basis, not for any two eigenvectors corresponding to distinct eigvals
don't think about the components of the eigenvectors, it's not going to be useful for this proof
oh
so i would have $$\begin{bmatrix}u_1\\vdots \u_n\end{bmatrix}^* A\begin{bmatrix}v_1\\vdots \v_n\end{bmatrix}$$
you can use vdots
figured
!superficialsicko

Meρρa

now you can evaluate it two ways by making A act on u or v to get different eigenvalues
$u^* Av = u^* (\lambda v)$
\$u^* Av = (u^* A^)v = (Au)^ v = (\gamma u)^* v = \overline{\gamma} u^* v$
here
right
also the overline is unnecessary over the eigenvalue
!superficialsicko

yes, because they are both reals
yeah, good so now you're nearly done with the proof
hm
$u^* (\lambda v) = \lambda (u^* \ v) = u^* Av = \gamma u^* \ v?$\
but $\lambda$ is distinct from $\gamma$
!superficialsicko

in particular focus on this: $u^* (\lambda v) = \gamma u^* v$
Meρρa

as a hint, you can think of $u^*v$ as just being a scalar
Meρρa

because it's a 1x1 matrix
let me think
the definition of orthogonality for vectors x,y is that <x,y> = 0
nah just look at this, you don't have to think about any linear algebra
it's just an equation with scalars in it effectively now
all i'm seeing is some sort of 'associativity' and 'commutativity' going on
$u^* (\lambda v) = \gamma u^* v$
Meρρa

write the left side in terms of $u^*v$
Meρρa

like right now lambda is in between there
!superficialsicko

in here
ok so divide by $u^*v$ since it's a scalar
Meρρa

isn't that a contradiction though
now to connect this with orthogonality
nonzero
you can't divide when it's zero
i answered ur 2nd question lmao
nonzero
if it's nonzero then you have a contradiction though
..yes..
so it must be 0
but we didn't define vector division though
we don't have that
but even if u didn't ask me to divide

i would've still concluded they were the same eigenvalues
what are you talking about
it's a scalar
i mean
?
how do i even explain that in my proof
there's another way to say it but the fact that you are having trouble with it being explained this way doesn't make me want to say it
you could subtract it to one side and factor it out
$(\lambda - \gamma)u^*v = 0$
Meρρa

now you know $\lambda - \gamma \ne 0$ so you can divide it and get $u^*v = 0$
Meρρa

but this is still a scalar
btw watch out for the case of equal eigenvalues there
we assumed from the start they were distinct
ah
Alright, my thanks
compute some more examples with this stuff
i was expecting it to be similar to the proof of the problem i asked about earlier here
and it was
you seem to be unsure about what a lot of this stuff actually is, like when you were talking about vector division
yeah good, it is pretty similar luckily
i just didn't think of it more creatively i suppose
haha all good, but now you know, pretty fun proof really

this looks more like multivariable calculus than linear algebra
but other than this it's just a matter of finding all the partial derivatives & arranging them into the jacobian matrix, & then evaluating it all at (-2,1)
Okay so the first step should be to find the partial derivatives of the 4 different terms in F(x)?
pretty much
Can anyone help me? I have 3 LA questions

Show if R_i < |a_ii| for all i, then A is invertible
something something eigenvalues?
Wikiwand
In mathematics, the Gershgorin circle theorem may be used to bound the spectrum of a square matrix. It was first published by the Soviet mathematician Semyon Aronovich Gershgorin in 1931. Gershgorin's name has been transliterated in several different ways, including Geršgorin, Gerschgorin, Gershgorin, Hershhorn, and Hirschhorn.
can also look up diagonally dominant mats
What have you tried?
i need some help on recurrent sequences.
Let's take the fibonacci sequence first
using this matrix formula

then

which is very useful in computer science, as raising to a power can be done in logarithmic time complexity
I have noticed that more recurrent sequences have this type of formula for the nth term (multiplying the first few terms by a certain constant matrix)
now the questions i have are
- do all recurrent sequences have this type of formula
- how do you find the formula
ping if answered or if you think i should have posted this question in another channel (maybe a more advanced one?)
if they're linear recurrent sequences, yes
probably best to think about how the formula for fibonacci sequence is made
it's the exact same idea really
multiply the matrix out and look at why corresponding terms are equal
i'm gonna ask a dumb question
how is the one for fibonacci made
i don't have a path for finding it, just the formula
do this
oh oh alright
F_n=(1)F_(n-1)+(1)F_(n-2)
F_(n-1)=(1)F_(n-1)+(0)F_(n-2)
Buncho Dragons

This is the easier form to digest
and we chose a vector with 2 elements because any fibo number is written in terms of the previous 2 elements?
Yes
wow alright that's awesome
makes sense
so now to make sure i got this right
if we have the seq $$A_n=A_{n-1}+A_{n-2}+A_{n-3}$$
then it's safe to say
$$\begin{pmatrix} A_n \ A_{n-1} \ A_{n-2} \end{pmatrix}=\begin{pmatrix} 1 & 1 & 1 \ 1 & 0 & 0 \ 0 & 1 & 0 \end{pmatrix} \begin{pmatrix}A_{n-1} \ A_{n-2} \ A{n-3} \end{pmatrix}$$
ℨєɟɟ̶ค𝔯

Yes
thanks!
i dont understand this statement: "if we have $ax=b$ then if $a=0$ and $b \neq 0$ then $0x = 0 = b$ which is false for any value x, and so there is no solutions"
zeffs

so if b is 0 then there is no solutions because a would also be 0
Consider a 2D XY plane. Is rotating XY plane by 90 degrees a Linear transformation?
Consider a 3D XYZ plane. Is rotating XY plane by 90 degrees but keeping Z axis constant a Linear transformation?
idk you tell me
can you write out these functions?
is it at least intuitively clear? do your rotations r satisfy r(x + y) = r(x) + r(y) and r(scalar*x) = scalar*r(x)?
can an equation with something on left and right side of equal sign ever have one solution?
can i have an example o this?
0 x 1 = 0
yes but $b \neq 0$
zeffs

but then $"if we have $ax=b$ then if $a=0$ and $b \neq 0$ then $0x = 0 = b$ which is false for any value x, and so there is no solutions"$ doesnt make sense to me
zeffs
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

because we cant have a = 0 and b not equal to 0
but why would a linear system ever have that?
a system doesn't need to have solutions
if $a \neq 0$ then it has the unique solution x = b/a for any value of b
zeffs

sure, why not

Someone help on q7 pls
I can't find the linear transformation its really frustrating
Okay so I figured out the answer but idk how on earth it worked
$[5,-3]=5e_1-3e_2$
Mosh

yeah cause T is linear
A linear transformation can be represented by a matrix right
yes
Why can't we just find that matrix and apply it to (5,-3)
You can
To find the image
left multiply the matrix representation to the vector in question gives the same as just applying T
$T[v]=(T)_\beta^\alpha v$
Mosh

for bases alpha and beta
Hmm I've not actually seen that notation yet
The most I've done is T(x)=Ax
Is this the same thing
if A is the matrix representation of T, yes
Ah right okay
So I realised what I did
I got confused because I found the matrix A for e1 to y1 and it was different for the one for e2 to y2
But its a linear combination of the two isn't it
Which is the same as a linear combination of e1 and e2 due to linearity
Yeah I see now, thanks for your help
$A=\begin{bmatrix}2&-1\5&6\end{bmatrix}$ in this instance
Mosh

not sure how you got a matrix that represents T with only 1 of the vectors
Basically I got the same as you x_1(2,5) +x_2(-1,6)
Which is the same as what you got
is it always favorable to represent a systems of equations in augmented matrix form?
what do you mean favorable?
in my textbook it says i can solve a system of equation using EEO(Elementary Equations Operations) but it seems as tho i cant find much information about this online, however it also says i can perform ERO(Elementary row operations) if i convert the system of equations into matrix form
They should be synonymous I'd think
ero 
but if they synonymous why do we need to convert the linear system into matrix to do gaussian elimination?
you dont need to
oh its just easier?
augmented matrix just removes the fluff of writing out the variables every line
You can keep it as a system, but each line is going to have every variable
so i could just do the matrix form instead of equation form typically
yes
so forward elimination can also be performed on a system and not just matrices
anything you can do to an augmented matrix you can do to a system.. as they are equivalent representations
gauss elimination consists of forward elimination and then doing back substitution right?
Gauss Jordan, yes
isnt gauss jordan forward elimination then backward elimination
or am i mixing them up
that's what you just said. .
my book has different definitions of backward elimination and back substituin
Gauss part is the Row Echelon part whereas the Jordan part is the Reduced Row Echelon part
is there a difference between forward elimination and forward reduction?
How does your book define forward reduction and forward elimination?
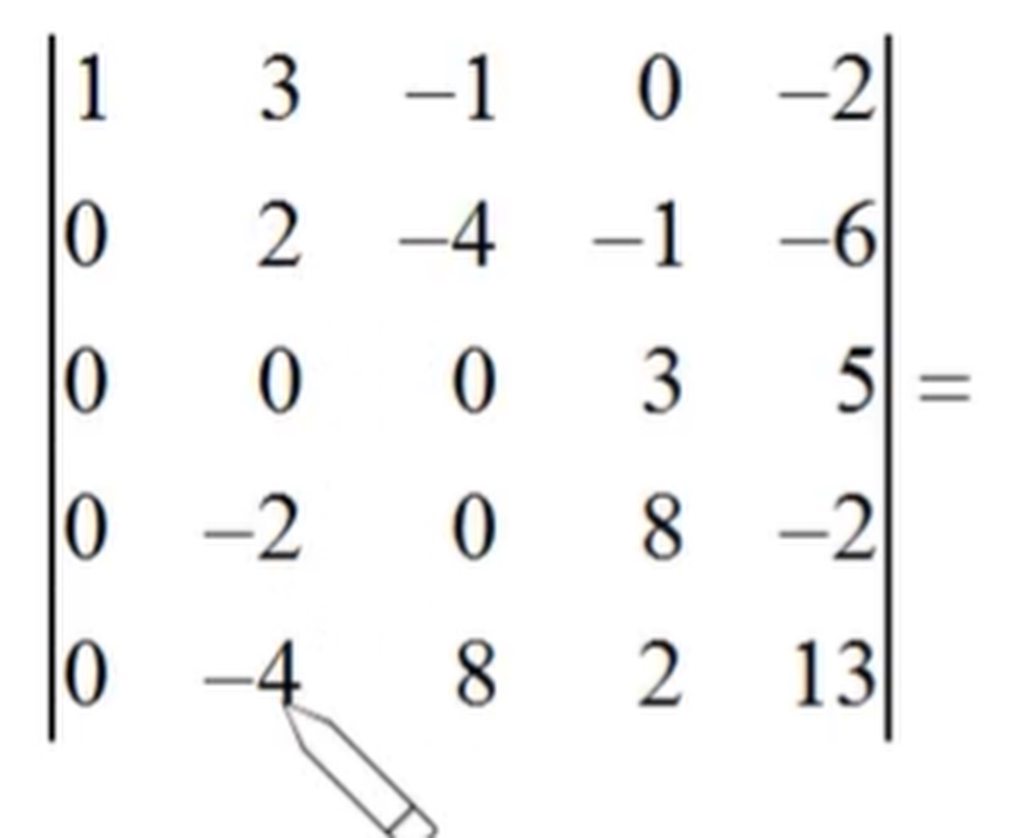
Hey everyone, first time linear algebra learner here. I'm trying to cram as much as I can conceptually before starting a grad program that I have no idea how I got accepted to. I'm learning about linear algebra through a udemy course, but sometimes I feel like they leave some important rules or concepts out. My question is in regards to finding the determinant of this 5x5 matrix. https://imgur.com/a/fqMoNK3
From my udemy course, if two rows in a matrix are the same then the determinant is 0. If i need to bring my matrix into row echelon form and in this example I do R4 - R5 -> R4 and R5 - R4 -> R5 then these last two rows are just the negation of each other. Then if I multiply either row by -1 the two rows will be the same and I would have a determinant of 0. I know this is not the case, but WHY is it not the case? What rule prevents me from doing this for any matrix determinant?
When you do R_4-R_5->R_4 your R_4 changes
So R_5-(new R_4) != R_5-R_4 in most cases
You can't do two elementary row operations simultaneously
You have to do one at a time
An amazingly important detail my course has left out - row operations happen one at a time.
Row reducing a matrix is the same as solving a system of linear equations in a sense
Another thing I've wondered, must I start a row operation with the row I intend to supplant? So I can do R_3 - R_2 -> R_3, but can I do R_2 - R_3 -> R_3?
You can
Think of linear equations
If you have
x+y=1 R1
2x+y=2 R2
Then
x+y=1 R1
(x+y)-(2x+y)=-1 R1-R2
Is an equivalent system
A matrix is just this but in a more abstract form
A system of linear equations
By equivalent system I mean the new system and original system have the same solutions
If a matrix A is row equivalent to matrix B,then
Ax=0 and Bx=0 will have the same set of solutions if a solution exists
Got it, this makes sense
That's not one elementary row operation tho. It's a combination of -R_3->R_3 and R_3->R_3+R_2
An elementary row operation is always of 3 forms:
- swap rows
2)R_i+cR_j->R_i
3)R_i->cR_i
If it's not in these three, it's not elementary
the second point can be addition or subtraction (addition of a negative) no?
Or is that then two operations?
Then I'm lost on how R3 - R2 -> R2 is not one operation. I am subtracting a row from another row and storing within a row occurring in the operation.
This has to be 0,not for any general c mb
You have to fix R_2 and add a multiple of R_3 for that to count as a row operation
Remember it's R_i ->R_i + c R_j
Here i=2,j=3
Meaning then I have to perform some operation on R_2 and store within R_2 for it to remain as one single row operation.
Do you include R_3-R_2->R_2 when you say "operation on R2"?
no, because r_3 is the row in which an operation is being performed on, but the result is being stored into r_2, which I've been wondering if it is acceptable as a row operation
Well,There are many operations you could do on R_2,like you could do R_2+aR_1+bR_3->R_2 if there are 3 rows
Not elementary
right, so that's the key term here. r_3 - r_2 -> r_2 is not an elementary row operation?
Yes,it is not
Check if the row operation is in this format. If not,It is not elementary. There are no other ways in which you get a elementary row operation
Mostly because we define only those operations as "elementary" row operations
When bringing a matrix into row-echelon as a simple method to find the determinant, what effect do elementary operations have on the determinant?
Suppose in my operations I perform 2R_1 - 3R_2 -> R_1. Do I then need to multiply my end result determinant by 1/2 and 1/3 to cancel the effect of having multiplied my rows by the inverse constants?
That's 2 elementary operations but w/e(2R_1->R_1 and R_1-3R_2->R_1)
Swapping of rows changes the sign of determinant
R_i+cR_j->R_i doesn't affect the determinant
cR_i->R_i scales the determinant by c
That's det(new matrix)=c det(old matrix) for cR_i->R_i
got it

Take a wild guess
thanks
what does ran mean
do you have some context
it probably means range but i want to make sure
yes...
not good with the english terms
idk why you're reluctant to show me exactly where you saw the ran notation

okay yeah it's range
for a positive definite matrix, is it true that all the entries down the main diagonal must be positive?
aka the trace of a positive definite matrix is always > 0
those are not equivalent
the trace, being the sum of the eigenvalues, is of course positive
but that alone isnt enough to conclude that each diagonal entry is positive
however it is true that the diagonal entries are positive
because $a_{ii} = \ang{Ae_i, e_i}$
Ann

ah yeah my second statement was incorrect




x and y being column vectors
$x^*y = \sum_{j=1}^n \overline{x_j} y_j$ actually. and under your definition, $\ang{x,y} = y^*x$, not $x^*y$.
Ann

conventions differ as to which argument in the inner product gets conjugated. i think physicists generally conjugate the first and mathematicians the second? but don't quote me on that.
basically they are complex conjugates of each other
that's where i was confused
so idk how they are equal
are you sure the theorem was $x^*y = \ang{x,y}$?
Ann

yes
and are you sure it's the y's that got conjugated in the definition?

number 5


third pic talks about how Euclidean inner product is the f in Example 36 but with all a_i = 1
third line in remark 37 should have F = R...
this book's full of misprints it looks like
then talk to your prof
so it should be a typo
thm 45 item 5 should have y*x
!superficialsicko

right?

careful, you're implicitly assuming this addition they've defined is associative
which it is not
ok i don't see how i'm assuming that lol
well ok no
all i see is distributivity
i guess you're assuming the distributive law
which doesnt hold either
because of the infinities
right
but i think explicitly breaking assoc is easier
try the two different ways of parenthesizing $\infty + \infty + (-\infty)$
Ann

so if we assume distributivity, contradiction because x = 0 = -x, but by assumption x and -x aren't in R, so does that do it
oh ok
yeah, there's no associativity
$(\infty + \infty) + (-\infty) = \infty + (-\infty) = 0 \ \infty + (\infty + (-\infty)) = \infty + 0 = \infty$
Ann

these are not equal, therefore addition isnt associative, therefore no hope to be a vector space


normal means A commutes with A* right
!superficialsicko

hermitian => real eigenvalues does not require normality iirc
indeed
ive already proven that in a previous item
hm
i was wondering whether to use inner products or not
if not, how i can make use of these three facts
using associativity perhaps, but..
If T is normal and c is an eigenvalue,then c* is an eigenvalue of T*
sooo
How would that finish the proof?
Do you know spectral theorem?
- $AA^* = A^*A$\
- $Ax = \lambda x$ for some nonzero (eigen-)vector $x\in\C^{n\times 1}$\
- $\lambda = \overline{\lambda}$
yep
!superficialsicko

there are ways of doing lists in TeX
specifically you want the enumerate environment
here's how to do it:
ik that lmao
oh
Then write your matrix of T in an orthonormal Eigenbasis
its faster this way tho
Take conjugate transpose to get T*
A is unitary diagonalizable iff A is normal
If c=c* for all eigenvalues you have that the two matrices are equal
is that the spectral theorem?
Yes
can i make use of $\C^{n\times n}$ standard basis?
!superficialsicko

i dont think we have that theorem
!superficialsicko

would i need to use gram-schmidt for that?
im lost lmao
You know U*AU is the matrix of operator in some basis?
The basis consists of columns of U
You know representation of operators as matrices requires you to choose a basis?
And change of basis formula helps you to find the representation in a different basis
ah u mean representations of linear operators, yes
Yea that
yes
You ok with this?
Now this being unitary means the basis is orthogonal
And the basis is Eigenbasis because the matrix is diagonal in that representation
why is that
also are u talking about this

Yes,That
each col of U corresponds to an element from B1 written with a coordinate matrix relative to B2
but those are the same bases
?
Also,This should be U^-1 I think
If that's confusing,Take the columns of U
Since U is invertible they form a basis
Let this basis be B_2
Now try seeing what B_2PB_1 will be where B_1 is your standard basis
I think you will end up with U or U^-1 not sure which one
oh, are you actually talking about since A is (unitary) diagonalizable, there's a basis for C^{nx1} containing A's eigenvectors?
Yes
oh u should've led with that lmao
i was confused as to how u obtained an eigenbasis from U
or U*
ok, i.e. a basis for the colspace of U
so yes
You know U is unitary implies the basis formed from col space is orthogonal?
was also confused since u didnt specify what the basis is a basis for
mb
nope
i dont see that directly

Mathematics Stack Exchange
So I'm trying to understand why the columns of a unitary matrix form an orthonormal basis. I know it has something to do with the inner product, but I don't fully understand that either (we learned...
ok, but im afraid id have to prove that too along with A being Hermitian
just to refresh, heres what i need to prove
maybe post the entire problem for context, but this channel is currently occupied
!superficialsicko

Your thing follows easily if you show your version of spectral theorem is equivalent to "every normal operator has an orthogonal Eigenbasis"
operators having bases? that's new for me
i.e. linear transformations (on the same vector spaces) having bases
Ok,Just ignore that I am being dumb
idk if this proof is supposed to be long anymore lmao
idts
as in there is a basis such that the representation matrix in it is diagonal
Just read up on the various forms of spectral theorem
This follows directly from one particular form

Just read this when you come back
@dawn fractal
(ping so that you can find this easily)
will do
what does this sign mean?

context?
probably "not equals"
post the full image
nvm you got your answer in #math-discussion
it's $\rotatebox{-90}{$\pi$}$
Meρρa

ye
Is calc workshop best resource for learning linear algebra
>calc workshop
>linear algebra
okay so their name is just misleading, got it
Any thoughts
I’ll have an midterm this Friday afternoon and want to get a very good score
Chapters 1 and 2 in lay and McDonald
I think you should ask a specific question about a linear algebra problem you've attempted to work on but can't figure out
I don’t have any specific question
My question to begin with was a broad open ended one
In that what’s a good online resource to get a comprehensive understanding of linear algebra for my midterm
@wintry steppe
I liked Gilbert's lectures, you can probably find (at least elementary stuff) at MIT open courseware. It's better to work through a textbook though imo.
Suppose for matrix A which is of dimension n*n, it's given that COL SPACE = NULL SPACE
What can you say about A^2 ?
What can you say about A^2 * X , where X is a non zero vector?
i can say a lot about A^2, and also a bit about A^2 * X where X is a non zero vector
wbu?
do you know what COL SPACE and NULL SPACE mean?
Col space = Set of Linearly independent column vectors
Null space = Set of Linearly dependent column vectors
that's not right
column space = span of the matrix's columns
null space = the set of x with Ax = 0, A being your matrix
a space is not the same as its basis
gang appearance of tteppann
considerable
is a zero matrix Symmetric?
Do you know what a symmetric matrix is?
A matrix is symmetric iff it is equal to its transpose yes
so this should be true?
cause i just got an 0 for saying it is
The transpose of a nxn zero matrix is itself
so those are symmetric
if it was a nxm zero matrix then its not symmetric
it's a 2x2 zero matrix
talk to your teacher then
Is there any weird trick for this? ik this is true cuz T-9I injective else 9 would be eigenvalue, therefore also surjective cuz operator and finite dim. Is there another way or are the specific numbers just red herrings?

pretty sure the numbers are just red herrings (This is a question from Axler's book right?)
yea Axler
lol that's a troll question
is orthogonally diagonalizing a matrix the same as diagonalizing it as normal?
because P^-1 = P transpose right
<@&286206848099549185>
An orthogonal diagonalisation of a matrix will also be a normal diagonalisation, but not the other way around
how would I go about finding uA and uB?

feels wrong to ping helpers for what I think is an easy question
uhh, what does uA even means?
well, u is a vector, and A is a base for the linear space V
I'm not entirely sure what to make of it
a similar practice exercise showcases this

ah, so by $u_A$ you mean u in terms of the basis A?
b2unit

so coordinates in respect to a basis, maybe?
I suppose, yes
the test is in a week and I'm trying to make sense of all of this stuff
well supposing it is (you should revise if this is indeed correct), then the straightforward way of solving for the coordinates, is to solve the system of equations created by the equality $\lambda_1 v_1 + \lambda_2 v_2 + \lambda_3 v_3 = u$ (where the lambdas are the coordinates and the v's are the basis vectors), if you express the vectors in terms of the canonical vectors (in this case, those are ${1,x,x^2}$), then you will obtain a system of three equations and three unknowns (the three lambdas)
b2unit

but sometimes, finding the coordinates is easier than that
thanks
- What should I be googling for?
2.The coordinates which lambda represent would be x^2,x^1 and x^0? basically?
so, in the case of this exercise: 3 -6 +5?
uh rather than googling it would be better to compare it with your class notes or the textbook that you are using, but if you want to google anyways,a good search term to begin with would be "coordinate and change of basis" I think
the lambdas would be the coordinates you want to find, if you are saying 3 -6 +5 because those are the coefficients of u then that reasoning would be incorrect, 3 -6 +5 are the coordinates of u with respect to the canonical basis {1,x,x²}
right
and I want to find u with respect to A rather than it's canonical basis, is that right?
well, assuming that u_A means that, then yes

that's the system
(I wrote it out on paper since I forgot how to do the vectors in latex lol)
I'm having a little trouble figuring out bijection. Can someone help me understand two examples? (That'd be [T(x, y) = (0, 0) and T(x, y) = (2x, y)]
[Please. Also, not saying both are, but two examples to understand the reasoning, cause I've been unable to so far]
I don't understand what you're asking ? You're asking if both of these maps are bijections ?
Uhum
ok so a map f: X -> Y is bijective if:
- f is injective, meaning that two distinct elements can't have the same image, i.e f(x) = f(y) implies x = y
- f is surjective, meaning that for any y € Y, there exists x € X such that f(x) = y, so basically "every element is reached"
Here, I assume T goes from R² to R² ?
It does, yes
I understand it on a theoretical level, but been having trouble matching this to the actual questions/examples
Ok so first let's look at T: R² -> R², (x, y) |-> (0,0).
Does every element of R² seems reached ?

No 😂
Right, so that means it is not surjective.
So it can't be bijective, right ? 
(not it isn't injective either, do you see why ?)
Uhum. This one is a little easier since it's so 'final' with the (0, 0)
ok then let's look at the second map T: R² -> R², (x, y) |-> (2x, y)
Hi, Can anyone guide me with polyphase filters used for decimation and interpolation?
First is it surjective ? If I take (a, b) € R², is there some (x, y) € R² such that T(x, y) = (2x, y) = (a, b) ? @bitter cape
(hint: ||this reduce to solving two distinct one variable equations||)
can someone tell me how they converted that equation into that vector form?

it's a bit of a sleight of hand, but it appears they are implying that b should satisfy 3b_1 + b_2 = 0
which can be considered as a system in its own right, with 2 unknowns and 1 equation

aha
also is this translated from another language
because "non-negatively defined" just sounds super wrong to me
yea most likely.
On wikipedia it says non-negative means > 0
positive would be >= 1
backwards
i mean all elements in the matrix would be > 0
that's so bad
nonnegative means >=0
no, this isnt what positive-definite means
you can have a matrix contain some negative entries and yet remain positive-definite
oh sorry yes, >= 0
positive means >0, nonnegative means ≥0
correct
this class isnt fun. The professor translated all the materials and homework so it is very confusing
the class is like programming and neural networks, but the final exam practice is only linear algebra
translated from what language, if you don't mind sharing
polish
...okay that was closer than i thought itd be
i thought it might've been translated from russian
i mean, ML deals very much with linalg
it does, but these problems weren't part of the course
aha
my only complaint is that the exam is really obtuse and not very related to the course.
!superficialsicko

i ended up doing this but encountered the above problem
!superficialsicko

I had a question, I worked through a proof sketch but ended up with $c_1$ in place of $c_0$. Did my lecturer make a typo or am I wrong here. I used induction on k for $P_k(z)$

Panda_Bear59

Ann

oh right, from definition of norm
but <v,v> is only 0 when v is 0
so that is not 0
ty
you should have c_n not c_1
ah i was thinking that too, but was trying to make c_0 work. So it is a typo?
it is a typo yes
is orthogonally diagonalising this matrix the same as diagonalizing it as normal, since its symmetrical?
oh wait, nvm its not symmetrical is it
it's not symmetric, unless you insist 6 = 0
now that its symmetrical, diagonalizing it as normal is the same as orthogonally diagonalizing right
you have to adjust the eigenvectors to have norm 1
and if you have repeated eigenvalues, you have to choose orthogonal eigenvectors
otherwise theyre already orthogonal
A^k means AxAx...A k times
What do you think they are asking?
They first ask you to calculate a few small powers of those matrixes
so makes sense they ask you for a general expression for their powers after
that's the whole point, no?
v*v is not zero, but the eigenvalue minus its complex conjugate is
for example if D is the following matrix
[0 1]
[0 0]
then D⁰ is identity, D¹ is D and D^k for k>=2 is the 0 matrix
how do i prove that if a square matrix A is diagonalizable, then A has a square root?
if you had a diagonal matrix, can you find a square root of it?
i do know that $I_nI_n = I_n$
!superficialsicko

but diagonal matrices are simply identity matrices multiplied by scalars
Well, the whole point of diagonalizing
is that it's easier to work with diagonal matrices
do you know how to calculate the square of a diagonal matrix?
a real square root?
simply squaring the diagonal entries
you will need its eigenvalues to be ≥0 if you want a real square root
otherwise it's not guaranteed

Take the matrix in the Eigenbasis,now consider the diagonal matrix whose diagonal entries are square root of the original one
i.e.,$b_{ii}=\sqrt{a_{ii}}$
Buncho Dragons

not sure which eigenbasis u are referring to here
Diagonalise A
Say D=PAP^-1(D is diagonal)
Now consider C a diagonal matrix such that c_{ii}=\sqrt{d_{ii}} for all i
ah, so you're working in C
P^-1 B P will be your square root
by sqrt{d_{ii}},I mean an element c such that c^2=d_{ii}
ofc.
im not bright enough to easily get this though
C^2=D
Because of how we defined it
(P^-1 C P)(P^-1 C P)=(P^-1 C^2 P)=(P^-1 D P)=(P^-1 P A P^-1 P)=A
this looks ok, but you made the notation cursed
they already used B for something else in the problem statement
just be careful with that
One sec,I will change it
ok i have tried using the fact that cols of AB are l.c.'s of cols of A and others but i am lost

im thinking it has something to do with which columns correspond to columns with leading 1s in the RREF
but idk how to determine that
WLOG suppose rank A <= rank B. So min(rank A, rank B) = rank A
i need to prove that rank AB <= rank A then
range (A),where A is a matrix is the set of vectors y such that y=Ax for some x
range(A) also happens to be a vector space
when doing matrix-vector products, you can represent the result as a linear combination of the columns of A, where the weights of the columns are the elements of a vector x
so Ax is a linear combination of column vectors in A. these column vectors are the spanning set of range(A)
wdym by 'weight'
coefficients
is there such a thing as elementary equations operations?
Like we have elementary row operations?
the elementary row operations represent the common ways you manipulate equations in a linear system
so theyre kind of the same thing
but no, no one uses the term
elementary equations operations
my book does in a small section but i cant find any info on it online
also is forward elimination and forward reduction the same?
well its just the general principle of
you can do something to both sides of an equation


Im not sure how to approach this problem
What does it mean that A and B are matrices whose reduced row echelon forms are both Identity?
does it mean that A and B are both identity matrices?
or just when we RREF do they become Identity matrices
This.
Oh I just did this one, this is a good one to do
How would you go about proving this?
Would you show that A and B are invertible because they are can be RREF into Identity matrix?
Are you familiar with what RREF means for matrices? Basically if I have the augmented matrix [A | b] this represents the x such that Ax = b
they are invertible by that property
^^
oh
To find the inverse you rref until you get the identity on one side and the inverse in the other
yes, fundamental theorem of invertible matrices
because both A and B are invertible, then AB is also invertible
thus (AB)x = 0 only has a trivial solution
Yes you got it
thus exactly one solution
👏
thank you
well it says $E_{32}E_{21}b$
Mosh

multiply them together
what?
what you just said makes no sense
E_32 is a 3x3...
i have no clue how you've gotten a matrix is a scalar

lemma (the previous exercise): let A and B be subs of V; then A union B is a sub of V iff B is a sub of A wlog, as:
the if is trivial
conversely assume A union B is a sub of V and that there exists a in A but not in B, and b in B but not in A.
then a+b must be in A union B
but if a+b is in A, then (a+b)-a is in A, ie. b is in A. similarly if a+b is in B, then (a+b)-b is in B, ie. a is in B. contradiction.
therefore there must be either no a in A not in B, or no b in B not in A. qed
_ _
now to prove the actual statement: let A, B and C be subs of V; prove that A union B union C is a sub of V iff two of A, B, C are subs of the last.
case 1: one of the subs is a sub of another. wlog let C be the sub of B. then A union B union C is just A union B.
case 1a: then if B is a sub of A, then B and C are the subs of A and the union is a subspace, in accordance with the statement.
case 1b: if A is a sub of B, then A and C are subs of A and the union is a subspace, in accordance with the statement.
case 1c: if A is neither a sub of B nor B a sub of A, then by the lemma the union is not a subspace, in accordance with the statement.
wlog, if two are the subs of one, then the union is a subspace, in accordance with the statement. however, if one is the sub of another but the last is neither a sub of the second nor the second a sub of the last, then the union is not a subspace, in accordance with the statement.
then the only case left is:
_ _
case 2: none are the sub of any other; then neither A union B nor A union C nor B union C are subs of V. we must show there is a+b+c not in A union B union C to fulfil the prophecy.
lemma: there is a in A not in B or C, and b in B not in A or C, and c in C not in A or B
this is because if every a in A is in B or C, then A is a subset of B union C.
if A is a sub of neither B nor C, then there is g in B but not C and h in C but not B.
then g+h is in neither B nor C, so A is not in B union C, contradiction.
therefore A is a sub of either B or C, but this is also a contradiction as this is case 2.
wlog, by the second lemma we can have non-empty sets D, E and F:
let D be all a in A not in B or C; let E be all b in B not in A or C; let F be all c in C not in A or B.
case 2a: if e+f is not in A, given that e+f is never in B union C, d+e+f is not in A union B union C. then the union is not a subspace, in accordance with the statement.
case 2b: if e+f is in A, e+2f cannot be in A. given that e+2f is never in B union C, d+e+2f is not in A union B union C. then the union is not a subspace, in accordance with the statement.
this proves the statement.
i really hope this is right lol
this was sorta fun but i am almost certain there was a better, shorter way without so much case juggling

{kind=link}
{kind=link}
{kind=link}
{kind=link}

if I know that A is matrix of order m x n , and rank(A) = n
how do I show that C(A) = R^m ?
what is C(A)?
column space of A
then the column space cannot be R^m, unless m = n
true, because rank(A)=n then A is invertible, and because it's invertible it means it's square matrix
that's not true in general
you can have rank n, but m > n
and then the matrix is not invertible
hmm
I missed one detail in the question like
The Given was: A is of order m x n, and for every Ax=b there's singular solution.
Prove that A is square matrix and that C(A) = R^m
and what are you told about A?
that's it hmm
so I tried answering this like this:
specifically for b={0} vector there's also singular solution.
That means rank(A)=n
right?
you still haven't told me what they tell you about A
so i can't say anything
the question alone is not enough
that's all they said it's just one liner 😦
I'll try translating it word by word sorry one moment
Let A be a real matrix of the order m x n, and assume that for every b ∈ R^m, the linear system Ax = b has a singular solution.
Show that C(A) = R^m and that A is square matrix.
Nice name username
thanks I tried my best 
ah, they gave you the extra info that every Ax = b has a singular solution
that was missing before