#linear-algebra
2 messages · Page 202 of 1
Let $U$ be a subspace of $V$. If $U \neq V$, then $\dim U < \dim V$. Suppose that $U \neq V$. We know that $\dim U \le \dim V$. Suppose that $\dim U = \dim V$. Then let the basis of $V$ be $u_1,\dots,u_n$ and the basis of $V$ be $v_1,\dots,v_n$. Append vectors $v_j,v_{j+1},\dots,v_{j+k}$ to the basis of $U$ such that $U = V$.
We then know that $\mathrm{span}(u_1,\dots,u_n,v_j,\dots,v_{j+k}) = V$ and that all vectors in this list are linearly independent, as none of the $v_i$ were in $U$ for them to not be equal. But observe that the length of this list is $n + j + k$, but we know that length of $\dim V = n$, so we have that $n = n + j + k$ which implies that $j + k = 0$. Clearly, $j,k > 0$ which implies that $j = k = 0$ which is a contradiction to the assumption that $U \neq V$ as this would imply that the two subspaces are equal without appending any vectors to $U$ from $V$. Thus, $\dim U < \dim V$.
Does this proof work?
n/c

<@&286206848099549185>
Can anyone check my proof?
Would it not be more straightforward to do the contrapositive i.e. if dim U = dim V then U = V?
@wintry steppe you should be explicit about the fact that "if U != V then dim(U) < dim(V)" is a goal, not an assertion. it reads as an assertion rn.
and also you need V findim as a hypothesis. if V is infinite dimensional it can have infinite dimensional proper subspaces.
also, "the" basis? there's (almost) no such thing as a vector space with one and only one basis.
also what's that with appending vectors to the list of u's "such that U = V"?
and why is this new list LI?
also the length of your new list isn't n+j+k, it's n+k+1.
What's the question?
Can the characteristic polynomial of an Endomorphism be defined without any choice of Basis or usage of matrices?
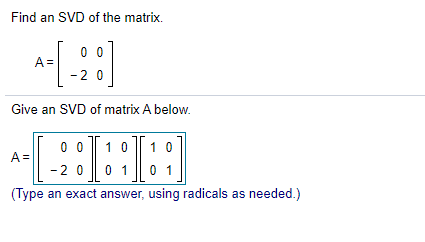
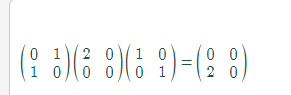
vici, that is not an SVD
you will have to read the definition to see why, but first of all, you have a 0 vector on the leftmost matrix
by definition, the SVD has an orthonormal basis for the image of the original matrix as well as its orthogonal complement (i.e. in an M x N matrix, the leftmost matrix is M x M with M orthonormal columns) as the leftmost matrix, and yours doesn't
since the 0 vector is linearly dependent
@waxen flume Also the reason you're getting A is because you're multiplying by the identity matrix. Any matrix times the identity matrix, you get the same matrix, kinda like any number multiplied by 1, you get itself
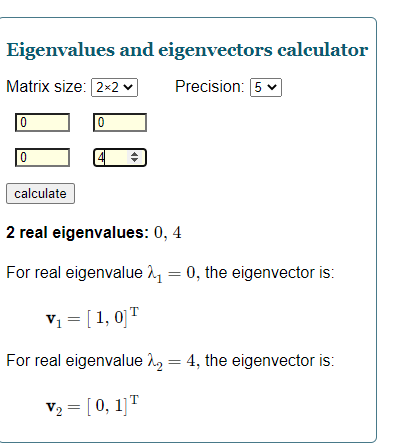
0

I redid my work
but now im stuck on finding u_2
because if i do 1/0 its division by 0 obviously
what is wrong with my Us
I dont get it
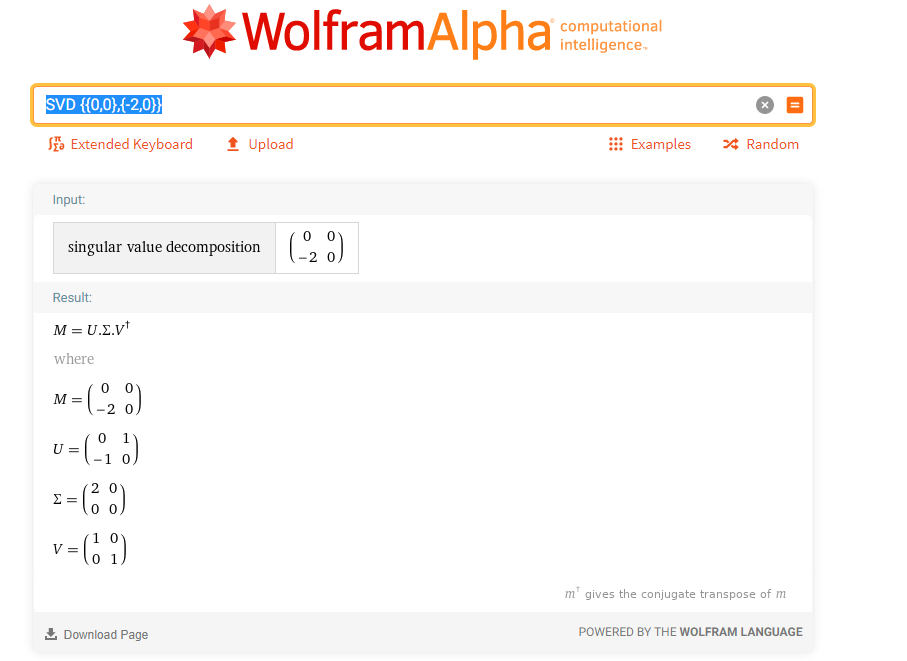
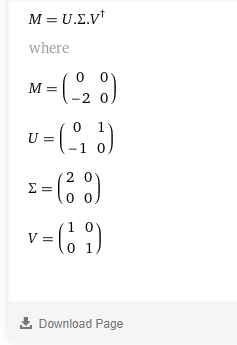
Do AA^T, plug in the eigenvalues and that's the U matrix
?
You did A^(T)A, and found the eigenvalues for the V matrix, do the same process except AA^(T)

Or you can do the method I said too, it works
Those vectors are in the span of U
i guess they did it wrong
because when i did it in my calculator
i got the same as wolfram

BUT
for the second U column
this makes no sense
because
1/0 * [A] * [v2]
Which is exactly why I said do my method, because you don't get a divide by 0 error
If you do it my way
whats your method
AA^(T), plug in each eigenvalue, find the eigenvector corresponding to that eigenvalue, and that's the U matrix

Work it out yourself and you'll see that it's not equal
It's the same concept as A * B != B * A

Plug in the eigenvalues and find the eigenvectors
didnt know that
@waxen flume How long have you been doing matrix multiplication/linear algebra to not know that?
i got
we dont talk about that


You messed up when finding the eigenvector for 4
You forgot a negative sign
You do need that negative sign, because if you don't, when you do UΣV, you get a positive 2 in the A matrix instead of negative 2

Multiply UΣV, and see what you get
I'm telling you, do it by hand
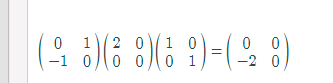
Because it needs to be a -1 to produce a -2 in the A matrix
okay
but i did the whole eigen system process
and i didnt get any -1 in my eigen vectors

Technically, you used the negative. You choose the 0 to be negative
If you choose the 1 to be negative, that's how you find it or you trial and error to find out which term should be negative
there has to be a reason why 1/sigma * A * V_i didnt work in my case
there's gotta be easier way to compute this lol
Because the σ was a 0
That's why it didn't work
Or if you know, the eigenvectors should be orthogonal so you can guess the missing vector
And you're normally not going to do SVD like that, unless you're doing image compression. Other decompositions are faster. Those are just problems to help you understand the concept of SVD
LU decomposition, V * Λ * V^-1 (which is eigen decomposition)
thanks @flint jackal
LDU is another one
im gonna watch more examples of the svd decomposition
It's simple if you do the process I told you, it's tedious but you can get all the vectors easily
the thing is with your process for the U part
i got the eigenvalues/vectors
but that negative im clueless on still
Or to find the U matrix, you can do (A * Vi) /(Norm(A * Vi))
but that negative im clueless on still
@waxen flume Like I said, if you multiplied out UΣV, and did not get A, that means one of the vectors has the wrong sign
Yeah
Normally, a SVD problem shouldn't have that many 1s but because it was a simple question that produced matrices of 1s, just trial and error
Linear algebra is easy
Normally yes, but the computations can be tedious.
its definitely easier than calculus 2 and 3
Normally yes, but the computations can be tedious.
@waxen flume Which is why you should use a calculator for matrices bigger than a 3 x 3
How do you make jordan decomposition
why

No, its negative semi definite
thanks.
ye
kinda forgot how to calculate nullspace
been 9 months since i needed that last time
you get rref form right
and like when you see any number to the right of pivot 1
then those numbers could be set to anything
not really helpful i guess unless it reminds you of the method
yeah found out how to do it, im trying to do some jordan decompositions
and im tilted af on these
wtf happens in these jordan youtube tutorials

oh ffs, this is for when we know A
but this just looks like
eigendecomp
which is a special case
just solve for eigenvalues and find eigenvectors, then you find p
note P contains the 2 eigenvectors as columns
back to youtube i go
Computing kernel is the same as solving for the homogeneous system Ax=0
that youtube was not really helpfull, since i need to do B=PAP^-1
and in that case I had A
$\begin{bmatrix} 3&4&0\3&4&0\end{bmatrix}\to\begin{bmatrix} 3&4&0\0&0&0\end{bmatrix}$
moshill1

so the eigenvectors are vectors [x,y] which satisfy 3x+4y=0
yeah i have done eigenvalues for my matrix M now i just needd to figure out how to do jordan for it
wait a second, couldnt i do it this way take M -> eigen values diagonally = middle matrix in jordan -> do nullspace and get P and then inverse P to get P^-1?
oh yes its all coming together now
If you put the eigenvalues in a diagonally matrix, it'll be an n x n matrix, right? Won't it have dim(ker(A)) = 0?
wait a second, how i determine for 3x3 matrix if one of the 2 eigenvalues is double eigen?
doesnt matter
you put them in too from what I know
similar to repeated roots of a polynomial

i got this situation i know my Jordan should have -1,-1,-0,5 or -1,-0,5,-0,5
but im unsure on how to determine the correct choise (spoiler it is the first one)
by hand, that is?
yeah
could try Newton-Raphson
or any reasoning i could use to justify selecting one
@novel hamlet Can you post your original problem? I want to see what the goal/problem is

And that's what it says to use? Jordan decomposition?
no method spesified as long as i can get it to jordan normal form and get that decomposition out of it
pardon my ignorance, but isnt that just diagonalizing?
I prefer to call it diagonalization with extra steps
so what are your steps so far?
calculate eigenvalues for A, then proceed to calculate Ker(A-eigen x I)
then combine null spaces to matrix P
I meant as in your working
i managed to do eigenvalues for A, but im only getting 2 instead of 3 i need
probably one that is repeated
There's a repeated eigenvalue
yes, but i dont know how to determine wich one is repeated
solving the cubic is a good start
,w solve -x^3 - 5/2 x^2 - 2 x - .5 == 0 for x


Well, it's the -1 that's repeated
yup, was looking for that, now you know which one is repeated
yeah this should help, next i just need to do Ker(A-(-1)I)

how did you get that-1.5?
oh i got typo
@novel hamlet Your Characteristic Polynomial is wrong
yeah i accidentally put wrong value
noticed it already
hmmm, come to think of it the nullspace of that is trivial
wait this method does not work


cant go via ker(A-eigen x I) route here
i dont get why J gets that poisitive 1 on 2nd row
oh nothing lol i was just poking fun ahah ur good. SVD has D for decomposition so i thought it was funny to see svd decomposition in the same way as rip in peace. ur good lol
singular svd value decomposition
edd, yuou got any idea where im getting it wrog?
Are you still doing that problem?
yeah, cant figure out, since null space is trivial
and not 100% sure where that positive 1 comes from
since if null space is trivial this whole thing does not work out
do you know how to get P when we know A and J for A=PJP^-1
Isn't P, just the eigenvector matrix?
no, at least when you look the above photo, from wolfram the eigenvectros dont hit anywhere
I haven't done much with with Jordan decomposition so not sure
usual algorithm for this would be, get eigenvalues for A, get ker(A-eigen x I)
and J comes from egenvalues of A and is diagonal P is some kombination of null spaces
but since my null space is trivial this thign does not work
What do you mean by this exactly?
I'd get 0,0,0 as my vector and that does not appear as column anywhere on PJP^-1
for matrix P
Not 100% sure then, sorry
please somepne ping me if you could help
what's the q
what Q?
question
jordan decomposition for

I have done eigenvalues and got the J
but when i try to do ker(A- eigen x I) i get that the result is trivial
when using eigen = -1

i'm afraid i can't help
i don't know what a jordan decomp is 😛
decomp using jordan normal form
yeah basically get jordans normal form (done) and then find common eigenvectors for P and then invert P
using
where A is square matrix € C and lambda is eigenvalue of it € C

I am confused as to how the matrix transformations on the left of each 3 x 6 matrix work in relation to the right hand side
Like the first change
how does 1,2 and 3,2 change by the right hand side remains as the identity matrix
like the first operation is adding the left most column to second column
But then the second transformation of adding row 1 to row 2 changes the right hand side matrix
I don't get it
Yea I'm stuck for 2c

<@&286206848099549185>
Not entirely sure why those operations are legal but can't combine columns like that because the first column is x while the second is y, you just can't have (x+y) in the column
I haven’t tried the question but if you get λ = -1 then you need to consider ker(A - - I) = ker(A+I), I think you’ve done ker(A-I)
yea me either but that's what the book says >_>
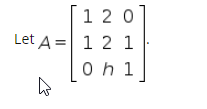
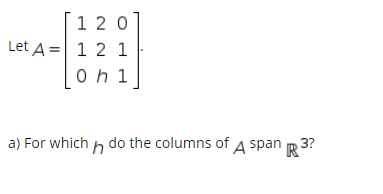
Row reduce like normal, except you'll have an h term
r2= r2-r1 seems like a good start
[1;2;0;0;h;1;0;0;1]
The idea is to get the h in a position where it would have an effect on the pivot in last column
That’s not rref
No I know
One second
Separate with commas and semicolons
Gona try dat next just finishibg my food

Step 2 is r3 = r3 - r2
oh i see
You should try again, there's errors in the first step
No there isn’t
There is
Element 2,3 should be -1
Why?
I am correct my friend
If h is not 0
Hello
Prove that the determinant and trace of the linear transform A are independent of the base selection in the range set of the transformation.
If h=0 there is nontrivial kernel
İs there anyone solve this?
Ah okay @golden kelp
You can do this a couple of ways. You can show that the characteristic polynomial is independent of basis and then the fact that the constant term in the characteristic polynomial is the determinant and the coefficient of x^(n-1) is the trace
Hmmm
I don't know much about the characteristic polynomial.
Can you explain Liitle more? :)
Ohhh thank you so much 👍👍
A Matrix M has an eigenvector v if M*v = λv, where v is a vector and λ is a scalar. This means that Mv - λv = 0 and the vector belongs to Ker(M - λI).
That's why a characteristic polynomial has all eigenvalues as roots. As it is exactly det(M-λI) which is zero if you plug in an eigenvalue.
👀 ps
It's about proving that two similar matrices have the same characteristic polynomial and determinant?
Aha ı got it. Eigenvectors and eigenvalues are in the last chapter in the book I'm working on. But you explained it well. I think in this way, we can see that the trace is calculated independently from the range set.
Have the same determinant and trace. I mean what you said was correct but the question wasn’t about the eigenvalues per se
I will learn eigenvalues and eigenvektor
That's because A and B are similar iff there is invertible P s.t. P^-1 * A * P = B
In fact, A and B do the same application. P "rewrites" the vector into another basis
And P^-1 gets back to the initial basis.
And det(A^-1)=1/det(A) for inversible A.
That can be proved by considering the determinant follows det(AB) = det(A)*det(B). You can prove it if you consider det as a multilinear function (just a long calculation with a lot of Σ)
That's why similar matrices have same determinant
But the problem is not about having the same determinant. Sorry maybe ı got you wrong
As to the characteristic polynomial: consider det(M - λI). Then consider det(P*(M-λI)*P^-1).
Okayyy okayyy now ı get you
Woow that's so Cool way if you are right
(let me think, I am improvising 🙃 )
Yes indeed you can do so.
This 👆 is the same expression as det(P^-1 *M * P - λΙ)
Yeah I understood how proof it is. So now I have to study eigenvalues and eigenvectors. Good by and thanks a lot 🙏
👍
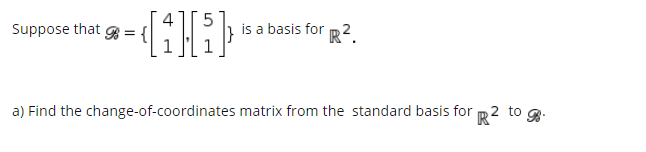
Does anyone know how to find this change of coordinates matrix
Is it just [4;5 , 5; 1]
Don't you need to find the inverse?
the one you said goes from the new basis to the standard so ^
Suppose $U_1,\dots,U_m$ are finite-dimensional subspaces of $V$ such that $U_1 + \dots + U_m$ is a direct sum. Prove that $U_1 \oplus \dots \oplus U_m$ is finite-dimensional and [ \dim U_1 \oplus \dots \oplus U_m = \dim U_1 + \dots + \dim U_m. ]
n/c

First we will show that if $U_i$ are finite-dimensional subspaces of $V$ for $i = 1,2,\dots$, then so is their direct sum. We will use induction.
Clearly, $U_1$ is finite-dimensional, and so its direct sum with no other subspace is finite-dimensional. We assume that $\displaystyle\bigoplus_{i=1}^k U_i$ is finite-dimensional for some $k \ge 1$. This implies that it has some basis, say $e_1,\dots,e_n$. Then, if $U_{k+1}$ is a finite-dimensional subspace of $V$ with basis $f_1,\dots,f_k$ such that $U_{k+1} \cap \displaystyle\bigoplus_{i=1}^k U_i = {0}$, then clearly $U_{k+1} + \displaystyle\bigoplus_{i=1}^k U_i$ is direct and has basis $e_1,\dots,e_n,f_1,\dots,f_k$, which is finite-dimensional.
We will now show that [ \dim \bigoplus_{i=1}^m U_i = \sum_{i=1}^m \dim U_i. ] We example the left-hand side: Suppose the bases of $U_i$ are given as
\begin{align*}
U_1 &= (e_{11},\dots,e_{1x_1}) \
U_2 &= (e_{21},\dots,e_{1x_2}) \
& \vdots \
U_m &= (e_{m1},\dots,e_{1x_m}).
\end{align*} We are given that the sum of the $U_i$ is direct, and therefore [ \dim \bigoplus_{i=1}^m U_i = \dim (e_{11},\dots,e_{1x_1},\dots,e_{1x_m}) = x_1 + \dots x_m. ] We now examine the right-hand side. We have, by definition, [ \sum_{i=1}^m \dim U_i = x_1 + \dots x_m, ] and so we are done.
n/c

Does this proof work? I know it's kind of long sorry
Can someone explain how to solve this question? I am not sure what to do.

You want to find a vector v such that Pv = v
well lets do some rearranging
Pv - v = 0
(P - I)v = 0
v is non-zero
so you want to find non-zero vectors v such that (P - I)v = 0
and then remember that it's a probability vector
so you have to normalize it
@lapis osprey
Ok now I have my own question

the last part of part c
answering this conceptual question of notions of diagonalization
Very lost
<@&286206848099549185> plz part c in that question above ^
Ok I think I have it
is it because symmetric matrices in R are orthogonally diagonalizable?
ie nxn matrices over R are symmetric iff they are orthogonally equivalent to a diagonal matrix?
<@&286206848099549185> Can someone look at the proof I posted above?
Why is this a proof?

I don't see how that proves that there does exist a unique linear map that does exactly that
@wintry steppe this only defines a suitable T. it's really up to us to show T satisfies the above. we must also show T is unique, ie if T & S are maps satisfying the above then T=S
the map is provided in the 'proof'. it's now our job to show it actually satisfies the above properties
I don't know if I can agree with that
We're not shown that it will always be the case that such a map will exist
we ARE. it's explicitly defined right there
No?

technically you do need to show that T is well defined, and that it is a linear map
but both are obvious, since v_i are a basis
i already pointed out we must show T satisfies the above properties
they're caught up on explicitly defining T
there are 2 parts to showing some object satisfying some property exists
every x in V can be written as a linear combination of the basis vectors, so T(x) = T(c_1v_1 + … + c_nv_n) = c_1w_1 + … + c_nw_n, and that is the definition of the map
explicitly define/provide the object, then show it satisfies the desired property
so to do the existence part of the proof, we must define T in such a way that we can then show T satisfies the desired properties
But we don't know this can be done??
the 'proof' just defines T. we're left to show T satisfies the properties
by definition of basis, any x in V is a unique linear combo of the vj's
I know that
which part do you not know it can be done?
it literally just defines what the image of each vector in V is
and that's all that a map is
@warped cape if you're being so tight about well defined, you failed to mention the linear combo is unique ensuring Tx is unique
that is true
Again I'm just saying we don't know that we can write it in terms of a linear combination in W
let x in V. since the vj's are a basis of V, there exist unique scalars c1,...,cn where x=c1v1+...+cnvn. then c1w1+...+cnwn is a uniquely defined vector in W, and we choose to define Tx as that
Keep in mind, you're not writing an element of V as a linear combination in W, you are defining a map, a correlation between elements of V and elements of W
this uniquely defines Tx for each x in V, thus defining T as a map V->W
If I wanted to reduce the following into a basis

I would make a matrix with each row representing one element (matrix) as follows:
1 0 0 0 1 1
0 1 1 0 0 0
0 1 0 1 0 0
1 1 0 0 0 0
0 0 0 0 1 0
0 1 0 0 0 0
0 0 0 1 0 0```then I would reduce the matrix.
I am looking for reassurance that I have the right idea.
@hollow willow redo row 4 but yes
ahh yes typo on my part but I'm glad I got the idea right. I wasn't sure if I would rewrite them as rows or columns
doesn't matter, we can row reduce em as rows or col reduce em as cols

I need help with Question 4
[v]_B1 is the coordinate matrix of v w.r.t. B1
Let $v\in V.$ From the definition of coordinate matrix,
$$[v]{B_1} = [\alpha_1 \ ...\ \alpha_n ]^T$$
and
$$[v]{B_2} = [\beta_1 \ ...\ \beta_n ]^T$$
for all $\alpha_i ,\beta_i\in\mathds{F},\ i\in\mathds{Z}_{n+1}^*.$
!superficialsicko

idk where to proceed from here
$\bZ_{n+1}^*$?
Ann

by that i mean the set {1,2,...,n}
Ann

anyway you will also need the change of basis matrix
the question was asked before that topic
so how could i proceed without using that
i mean, is there any relation between alpha_i and beta_i?
scratch that question
here's a new one
how do i prove that
$${B_2}P{B_1}[v]{B_2} = [v]{B_1}?$$
!superficialsicko


i already have an intuition for what change of basis does to vectors in R^2 when i want to write them as a linear combination of the new basis vectors, but
i can't grasp the concept in general
it's gonna take some index fuckery and keeping careful track of summations
so to prove the theorem i need the fact that every vector v in V is a (unique) l.c. of vectors in B_1 or of vectors in B_2?
and not by actually explicitly proving the theorem
Finding the eigenvalues of a matrix is easy, but finding those for transformations for some reason is so much more complicated for me

anyone know how to tackle this?
for what values of lambda does f' = λf have a nonzero solution?
this is a differential equation
Ooh
How do I go about solving this?

guys i got this doubt
are gaussian elemination and row echelon form are the same?
oh they're the same lol
no, they are related but they are not the same
like ?
In mathematics, Gaussian elimination, also known as row reduction, is an algorithm for solving systems of linear equations. well i googled it
confused 😅
"gaussian elimination" refers to the process
"row echelon form" refers to a form matrices can be in
oh so what's gaussian elimination is generally?
?
do you want me to describe the gaussian elimination algorithm in full or something
well kind of confused but it's a process right and generally what does that does?
just say it simple i'm not asking it in brief
it's a sequence of row operations applied to the (augmented) matrix of a linear system in order to solve the system
Process that lets you solve a system of linear equations
if you ask me it's just a certain kind of algebraic manipulation except it's written in a more streamlined format
yeah now got it thanks 😄
gaussian eleemeenation
let A be square NxN matrix (A€C), find smallest k€N that Rank A^m = rank A^k, for all m > k, how should i approach this?

for part b) how comes the span of p_1, p_2, p_3 is equal to this

i get the (x-2)^2, (x-2)^3, but idk why (x-2) and 1 is in the span
it doesn't say "Show {p1, p2, p3} is a spanning set for V", does it?
i mean, ok, hold on
$p_1(x) = (x-2)^2, p_2(x) = (x-2)^3, p_3(x) = x(x-2)^2$
Ann

(x-2) and 1 are not in V

ah ok
@wintry steppe try some rotation and reflection matrices maybe?
what is the matrix of moments associated to legendre polynomios?
guys what's crout's method?
Google is your friend, I suggest that you look that up and read about it. But from my research, it looks like it's a algorithm for LU decomposition
yeah LU decomposition method learning it
It looks like Crout's method returns a lower triangular matrix and a unit upper triangular matrix
yeah well i don't get this

LU Decomposition
Instructor: Ben Harris
View the complete course: http://ocw.mit.edu/18-06SCF11
License: Creative Commons BY-NC-SA
More information at http://ocw.mit.edu/terms
More courses at http://ocw.mit.edu
i'm referring to the MIT courseware video tbh
i think i'll watch another video
confused enough lol

actually how they're calculating ?
Calculating what exactly?
well never mind lol i were confused in the row operations
understood the LU decomposition 😄
Can someone tell how rank(a) works with A^m
Since rank a =< min (z,y) where a €R z*x
you introduced a lot of variables without clarifying what they are
are a and A meant to be the same thing? what are x, y, z?
A is same just phone autocorrect
Z and y are the dimensions of matrix a
X was just typo
I know I have to prove the 10 axioms. But I’m not sure what an element of V would look like?

For example, how does u+v look like
an element of V is a positive real number
with vector addition being ordinary multiplication
so if u = 2 v = 3, then u+v = 2*3=6 and uv=3^2 = 9
oh right.
you will need to distinguish 3 as an element of your vectorspace and 3 as a scalar
granted, this construction is a bit unorthodox but its purpose is to illustrate that vector spaces do not always look familiar
okok thank you
so elements of V are single positive real numbers so it can't be like (2,3), but are still considered vectors.
you could write them like (6) if you want
how do we know that the only solution for the spanning set is c_1,c_2,c_3 = 0

oh actually nvm thats a dumb question
is this question just the definition of a basis, just do reduce row echelon and pick the pivots with 1 and the columns that correspond to the basis, don't really know how to approach this

insofar as it should be done using the definition of a basis, yes
try for small matrices first
you do not need to do any row reduction for this problem.
Mat_{nxn}(R) is that same thing as R^(n²)
same as a polynominal field?
yes they both denote the n by n matrices over R
hmm usually R^(n²) would denote lists of n² elements over R. which are indeed the same thing as vector spaces
oh i read that as R^(nxn) while you meant tuples. but yes they're isomorphic
welp i tried to do the question
but pretty sure i proved absolutely nothing

big f
damn 2nd line doesn't even make sense
meant to say it's a basis of r^n
V consists of matrices, not polynomials...
so your basis should consist of matrices
how should i denote my matrices?
Not as monomials
like when i'm writing them out as a span
$E_{i,j}$ is standard notation for the elementary matrix with 1 in the (i,j)-entry 0 else
moshill1

give them the answer 

no, because Mat_{nxn}(R) doesn't contain polynomials
its elements are matrices
so your basis should consist of matrices

this is only a basis for the space of diagonal matrices, but you're on the right track
not sure what "where S is an identity matrix" means since it's a set of matrices. you've checked linear independence - good - but why does this span?
a basis of V is, by definition, linearly independent and spans V
i was trying to say when they added up it makes a diagonal matrix
but i don't think i needed to say that
it's kinda self explanatory
how do i get eigenspace of matrix A if i have done row reduce and i got eigenvalues?
if c is an eigenvalue find ker(A - cI)
yeah i know of that method, but that is probably worst idea since i have to use R to do this
I know i can deduce the matrix eigenvectors from this
but i have forgotten how

i've got an idea, list every single matrix not just the diagonal and show that it's linear independent
wrong matrices
every single matrix? be more precise, i'm sure that's not what you mean
like E_1x1, E_1x2,..E_1xn
and all the way so when they add up
they make a filled up matrix
and i can show linear independence and so it's a matrix
works?
you tell me
yes
thought you was the teacher here 
tera's making sure you know definitions and using them correctly, not holding your hand
I don't understand this question. It is mostly the basis that I am confused about (I have read quite a few places and watched videos). I am not completely sure about egenvectors either. (egenvektorer=egenvectors)

I think I am supposed to make vectors out of the columns
can you find the eigenvectors of A?



Find λ
2 and 0
You should have 3 roots

So say for instance $λ_1 = 2$. Do $A - λ_1 * I$
dldh06

null space?
Kernel
ahhhh
They both mean the same
ok i understand kernel somewhat. i just learned about it though.
Work out what you think you do, and post your work and I'll see if it's right or not and help you that way
so here i have a reduced echelon and the koordinates. then i would get the kernel through that, right?

Which value of λ did you do first?

No need for determinate
yea but what i posted before should be the lambda=0 then
Is this your answer that you found or the book/solution key?
So this matrix is correct but the solution is wrong. Set that equal to 0 and then solve for the values
So for the first row, it would be $1x_0 + 0x_1+ 0x_2 = 0$, correct?
dldh06

You understand how I got that for the first row?

Ignore the λ
ok

Just $A\vec x=\vec 0$?
Sim

and we get the kernel from that, because that is the standard way to get the kernel?
Specifically, $(A-λ_1)\vec x=\vec 0$
dldh06

Yes
but i thought i should ignore the lambda... shouldn't lambda occur somewhere in what you wrote?
Those λ are the roots, when you did $det(A - λ*I)$
dldh06

ah yes it is zero now. i see
So for instance, the first one you did. You did $λ_1 = 0$
dldh06

Then use this
yea, so i get to keep it for the other one
but i am slightly confused that we are gonna have two kernels then
2 kernels but the one with repeat roots (λ = 2 because it's a repeated root), you can create two different vectors from the same kernel
For when $λ_1 = 0$, get this, understand?

dldh06

I did $x_2 = 1$
dldh06

this is helpful
Do the same for $λ_2 = 2$
dldh06


ok, so now i have two kernels, right? i am slightly unsure about that we a dealing with two different x vectors
two kernels??
Do it one step at a time, show your work for $(A - 2 * I)x = 0$ first, because I'm confused on how you got to the second line
idk T_T
dldh06


Not exactly, you can still reduce it a bit more
Also, when you find the kernel, it should be in Reduced Row-Echelon Form
ah so it is zero on two rows. so i it supposed to be reduced echelon?
Yes, exactly
When you have this, what should the solution be? The set of equations like we did for the first value of λ


You're missing one more set
i only had two lambdas
And that first line is incorrect
so we just can't know for this one? so we put the two solutions together to know?

ok
Now because we have a lot of free variables, we can't say $x_0 = 0$ $x_1 = 0$ $x_2 = 0$
dldh06

ofc. gotcha
Make one of the variables equal to 0, and the other 1, and that's one eigenvector for when λ = 2
Then because λ = 2 is repeated, switch the 0 and 1 to get the other eigenvector
yes so now i have two eigenvectors
So $x_0 = 0$ $x_1 = 1$ $x_2 = 1$, is one vector and the other vector is $x_0 = 1$ $x_1 = 0$ $x_2 = 0$
dldh06

wasn't the other one like this?

It's not $x_1 = -x_2$, it should be $x_1 = x_2$
dldh06

hmmm i feel a bit stupid atm

That's the matrix, right?
ah no this was the previous one
oki
yea then i agree with (1,0,0) or (0,1,1) if it was only for the last one
So you should have all of your eigenvectors with the eigenvalues
ok 3 vectors.
So the problem was the basis consisting of the eigenvectors, correct?

So you found the eigenvectors, which is the basis
so i make a span of the 3 i found?
Yep, exactly
and then nothing more?
Nothing more, because it asked for the eigenvectors, which you found
No problem

do you know Least Squares solutions?
no?
not sure what that is
i think i need to project it but im not sure what to do
You need least squares method
Hiya, I was wondering if anyone could point me in the right direction with this; I am trying to generalize my notion of transforms and functionals to linear maps/operators and was wondering if someone could help me make the connection between these. So I know what a linear operator is now, and that it has a matrix representation (which you get by letting it act on the basis vectors of the initial vector and then find with respect to the second vector´s basis- correct me if Im wrong). I´ve been introduced to coordinate transforms, and within that intro we were given a transformation matrix which is unitary. How might I visualize this in terms of a linear operator? Im kind of new to this generalized approach so i cant yet fully visualize it. Below is an example of a matrix ive been given which i want to connect with the operator concept:

If you don't know about least squares, I suggest you watch this https://www.youtube.com/watch?v=WABC6wmuLOk&list=PLkZjai-2Jcxlg-Z1roB0pUwFU-P58tvOx&index=28&ab_channel=JeffreyChasnov. Also, you were kinda right about projection but not exactly
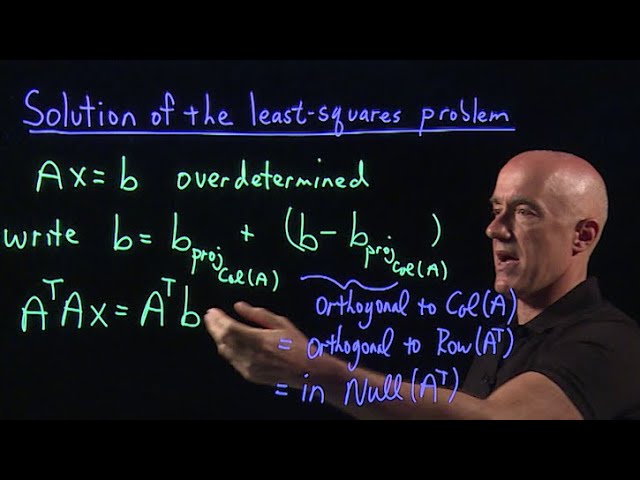
How to solve the least-squares problem using matrices.
Join me on Coursera: https://www.coursera.org/learn/matrix-algebra-engineers
Lecture notes at http://www.math.ust.hk/~machas/matrix-algebra-for-engineers.pdf
Subscribe to my channel: http://www.youtube.com/user/jchasnov?sub_confirmation=1
If x^TAx=x^TUDU^Tx where A is symmetric and D is diagonal, does x^T have the same dimensions as U?
If not would x^TU=(U^Tx)^T?
How do I show that S(T_1 + T_2) = ST_1 + ST_2
Where S, T_1, T_2 are linear maps?
I can show that (S_1 + S_2)T = S_1T + S_2T
But we only defined addition of maps (S + T)v = Sv + Tv
And so I am not sure how to do this way
(S+T)(v) is a linear combination of vectors, assuming both S and T act from V to W
so if S is linear, then you can apply linearity again
What is this in relation to?


If I had a short proof from my linear algebra class is this the right spot to ask if someone can look at it and verify?
yes
Cool! here's a pdf; there are 4 proofs, each about a page long. Our class is using Otto Bretscher linear algebra with applications 5th edition.
thank you so much!
If you only have time to look at the first one that would be more tan enough help, I don't want to hog anyone's time
I need help showing that if A is positive semi-definite, then there exists a matrix B such that A=BB.
<@&286206848099549185> im going to cry
That is true if B is symmetric, which I think it is since A is symmetric since A is positive semi-definite. Unless, I'm wrong about that
arent all symmetric matrices diagonalizable or something
Yeah, I have because A is positive semi-definite, then x^TAx\geq 0 for all xin R^n
A=UDU^T where UU^T=I
If A=B^TB then D=(BU)^T(BU), but I don't know how to get to that without assuming what I'm trying to show
backwards
D is diagonal, so you can easily say D = sqrt(D) * sqrt(D)
then just associate U sqrt D
You can take square roots of matrices?
yes
and particularly for diagonal matrices, you just take the square root of each element
you can prove that yourself, it isn't difficult
Thanks

What if D=C^2 and B=UCU^T?
you're making a mess
i'm in a meeting right now though, hopefully someone else can give you a hand
you only need B = UC tho
wait
can someone tell me why the rhr is used
i asked a long time ago but forgot about it
when looking for orthogonal vectors
how do we determine which vector to use
since there are two orthogonal vectors
the positive and negative
i understand how to get the multiplication table for i * i and j * j and etc
but i don't understand why some are negative
Its like a physis convention, you use right hand rule as convention to choose what it means by positive value
to for example encode which direction something rotates in
but if you have two vectors cross producted
aren't there two different vectors
that could arise
as there's two different orthogonal vectors
well depend on the order of crodd product, like AxB = -BXA
but thats consistent with RHR
is this like linear algebra
like orientation?
wait
this is linear algebra
bruh
this is vector calc
so is this linear algebra
um i guess it is yea but just 3D linear algebra
Could someone explain what the R^n and R^m notation actually means? I'm so confused about it because I'm not sure what it represents, I thought it was like the dimensions of a matrix or vector but I'm not sure 🤔

dimensions
it's the dimensions of the vector
iirc
so like R^3 mapped to R^2 means mapping 3d to 2d
I may be incorrect but that's what I recall
So would that be a 3x3 to a 2x2 matrix
I don't really remember if they have to be square matrices
I just remember that they're two separate dimensions
If i proceed anymore, i may confuse you so I'll stop here for the best
Yeah I'm confused about this
R^n and R^m are vector spaces
a linear map does map between vector spaces and is linear
R^n is the set of n-tuples of real numbers and R^m is the set of m-tuples
the associated matrix must have m rows and n columns
so if x is in R^n then Ax is in R^m
Hmm I think I understand a bit better now - so each one is a vector space with m x n rows right
Is it one matrix transformed between 2 vector spaces?
the matrix is just convenient notation for the linear map T
in this context
the matrix is a way to represent a function
if you want, you can say that T transforms R^n to a subspace of R^m
that just means you apply T to all elements of R^n
Ahhh so can I think of it as a transformation that maps x to Ax ?
yea, T maps x -> Ax
The first q asks how many pivot columns are in A, but I don't understand how this would be related to vector spaces if vector spaces don't have rows or columns
its just related to A
the question is equivalent to asking whether T is an injective map
but this is the case exactly when the image has the same dimension as the domain
the columns of A are the images of basis vectors
so this is also equivalent to asking whether A has n linearly independent columns
and that is the number of pivot columns
So just to make it clear, n and m of a matrix have nothing to do with R^n and R^m right
they have something to do with them
the dimension of the vector spaces determines the number of rows and columns of A
How?
if you have T: V -> W with dim(V) = n and dim(W) = m, then any associated matrix A will have m rows and n columns
so in this case, x has n columns and Ax has m rows?
what is x
x in R^n
if x is in R^n then Ax is in R^m
i think you should go back to matrix multiplication
I think I sorta understand it, thank you for your time :))
I think I got confused because for some reason I'm thinking of vectors as having rows and columns which is wrong
Question:
When finding a standard basis of a subspace in P2. 2 conditions must be satisfied.
- The vectors have to be linearly independent
- They have to span the entire subset.
However, I've read somewhere that the basis vectors have to span the entire space of P2 (not just the subspace).
Is this true, and is this specifically for subsets of polynomials?
@wintry steppe if you want a basis for P2 it has to span P2. If you want for a subspace it has to span the subspace.
Dosen't matter if it's a subspace of P2? In other words, the vectors dosen't necessarly have to consists of x^2, x and a constant.
P1 is a subspace of P2, and a basis for P1 would be {1, x} which spans P1 not P2.
Makes sense, thanks
$x=\sqrt{1}$
kanga

I got a question, again.
W = p(x) = a + bx^2
How to form an orthogonal basis from subspace W, in P2?
do you mean W = {a + bx^2 | a, b in R}?
Yes
and orthogonal in what inner product?

okay
{1, x^2} is clearly a basis for W, so orthogonalize it
using that ^ as your inner product
you literally defined W as the span of those
Can't seem to understand the basics
:p
nvm, I'm slow
Okay @dusky epoch How do you go from that orthogonal basis to an orthonormal basis? Do you have to normalize it?
{1, x^2} isn't orthogonal
but yes, after you orthogonalize, if you want not just an orthogonal but an orthonormal basis then you will only need to normalize each vector.
but you set out to just get an orthogonal basis, not an orthonormal one. so technically you don't need that.
ok, thanks
I know, it was just a follow up question, just to map everything in my head.
does this mean _B1P_B2 is equal to its own inverse here?
why does _B3P_B4 become equal to (_B1P_B2)^-1 and not simply _B1P_B2 ?

where _B3P_B4 is the transition matrix from B4 to B3
and m(f)_B2,B4 is the matrix representation of f relative to B2 and B4
@dawn fractal looks like a typo. the leftmost matrix should be _B1P_B2. now the inverse of a transition matrix is another transition matrix causing the 'reverse' change of basis, so _B1P_B2=(_B2P_B1)^-1 which is what i think they meant to say
any particular name for this theorem?
same thought
guys
can someone please provide a solution to this

actualy no i solved this haha

for question 1
i'd call it a formula for the matrix representation of a linear map under a change of basis of the domain & codomain
we don't give out answers here.
ok thank you
ok thx
write W as the span of a set of vectors then use any procedure to pick out a basis of W and hence find dim(W)
@sonic aurora you can use the membership rule of W to form the basis
e.g. a basis of P_3(R) is {1,x,x^2,x^3} =: B
and every vector v in P_3(R) is a (unique) linear combination of the elements of B
v = a(1) + b(x) + c(x^2) + d(x^3)
so to form the basis you just need to express each vector w in W as a linear combination of the terms in w in W
they dm'd me asking for a full solution. i don't think they intend to read any of this
and of course prove that that potential basis is a basis by proving it is linearly independent
@sonic aurora
it's why i have my privacy settings turned off xD
they're banned
sad
@dawn fractal i won't say specifically, but the severity can be compounded by poor attitude etc
Question:
What is the length of a polynomial vector?
Is it sqrt of inner product(vector, vector)?
😄
since they went 'under the table' to me after just being told not to do so, i placed a longer ban
vector spaces a priori dont have a notion of "length"
you can give them one, but you have to specify how
the method youre referring to is getting an induced norm from an inner product
but of course, this requires you to have an inner product on your vector space
to show an isomorphism do i need to show injectivity, surjectivity and also linear mapping?

which you dont have "automatically" either
yes.
hmm
but you already did all that in (a), (b), (c)
(d) is just "putting it all together"
right.
would the right answer be it's not because b,c is not mapped in the image
right, it's not surjective because its image is not all of $\mathrm{Mat}_{2\times 2}(\bR)$; for example, $\begin{pmatrix}1&1\1&1\end{pmatrix}$ is not in the image
Namington

yeah
because the "b" and "c" entries are always 0.
i don't get the need for the other lines, isn't the 1st line already sufficient to state the kernel?

u wouldn't be able to set a=d=0 without the 2nd line
thats just the defining the kernel for the map
1st line is definition
2nd line just evaluates the linear mapping
3rd line is the kernel for this specific mapping
yeah makes sense
if we have dim v> dim w
then there exist no linear map that is surject & injective right
no injective one from V to W, and no surjective one from W to V. so certainly no invertible one either way
slimevesus

Is there a reason as to why a change of basis is defined as:
$$e^*_i = c^j_i e_j$$?
I suppose it's because every vector of the new basis is ultimately just a linear combination of the vectors of the previous basis; is this reasoning somewhat correct?
rcatalang

that is exactly correct
there has to be an invertible linear transformation between bases
Nice, thanks!
you're welcome
sometimes, when finding the inverse of a matrix, my gaussian elimination steps are all mathematically correct, but the inverse i obtain is wrong
why is that?
how do i know the correct steps?
example?
this is the correct answer


and the above is mine
both follow the same steps but in a different order. but shouldnt the answer still be the same
for part c, I get that (cf)(3) = cf(3) = c+cf(-5), but I don't understand why that doesn't work. why do we expect cf(3) to also be 1 + cf(3)?

I think I'm missing something about (cf)(3) = cf(3), what does (cf)(3) really mean in comparison to cf(3)?
because you made a mistake
(cf)(3) is defined as cf(3)
-2+1 = -1 which is not 1
even better, 0 \neq 1 + 0 (re rohak's question)
Yeah I was about to say 0 isnt in option c
hmm I don't understand what you're trying to say here
For it to be a subspace it needs the 0 vector (0 function in this case)
ohhhh yea, gotcha
it's probably the first thing you should check if you're ever given a "is this a subspace?" question
I meant it as kind of a vehicle to explain cf(3) here doesn't equal (cf)(3)
that's the definition of (cf)(3) 
why is it that we expect 1+ cf(5) though
isn't c * f(3) literally multiplying the output of f(3) by c
we shouldn't expect that to be true. take c = 0.
it's literally not true. the set here isn't a subspace

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}