#linear-algebra
2 messages · Page 191 of 1
well no matrix can do that with this as your origin
you'll have to translate it first
you can do an affine map i guess
so you have two tasks: determine the distance from the origin to the red line, and determine the angle between the xy plane and the upper point at that angle there, you can use a dot product
you can do a translation with a matrix if you're using homogeneous coordinates if you really want to be fancy, sure
but probably not a good idea to try to do it that way if you're asking this question in the first place lol
@wintry steppe so do that, find a vector from the origin to the red line that's the shortest length
this should be easy cause it's nice and symmetrical
hint: it's the average of two vectors
(1/2, 1/2, 0)
i guess then that the sequence of transformations would be
translate by (-1/2, -1/2, 0)
rotate by some angle around (1, -1, 0)
translate by (1/2, 1/2, 0)
you can do that in steps as mentioned above, or try the rodrigues rotation formula
I mean after I translate by (-1/2,-1/2,0)
oh, do you mean like rotate so I can rotate about an axis and then rotate back?
yeah i think thats what it boils down to
is it impossible to simplify fractions if the numerator or denominator is an odd number?
see pins
yea i did
you can get the angle from the dot product
In finite fields, do we need to be careful doing row reduction?
I found this problem pretty interesting
Suppose F was Z/2Z (It cant happen here because it is a subfield of C) then this is no longer true

like my question is we can still do row reduction right for finite field except just doing mod
yes
Sup
is it correct to say that a transform that maps from a higher order dimension to a lower one, has always infinite many solutions, if any?
ker T = nul T = {v: Tv=0}
and the system is consistent
if n > m then nul T includes not only zero vector
yo az
i suggest you to prove that set of vectors v s.t Tv = 0 is subspace of V where T : V->W and V,W are both vector spaces
just translate the statement into subspaces of euclidean space and linear transformations between euclidean spaces if you're uncomfortable with abstract vector spaces
there's no loss of generality after all
all functions are analytic?

why good
8 hours of what
sleep
kid
how old are you
he's like 9 or 10

This may only be done by a moderator!
😮

Does anyone have any recommendations for introduction to finite groups?
maybe ask in #book-recommendations
your matrix A looks ok az

starting from the left subtract columns from their counter part on the right
this will leave you with 2 diagonals and the rest 0
the main diagonal will be all 1000
the other diagonal will be all -1000
then add those corresponding rows and you will have a matrix full of zeros
@coarse marsh
yes
you even don't need to do that all
just subtract first column from last column
then add first row to the last row
you find the last column is 0
a matrix with a column/row of zeros has determinant zero
done
you welcome
honestly i would probably try and do something with characteristic polynomials
but that's highly specialized fuckery
lemme try and see if it works out.
oki
my first reaction was putting it on symbolab
then it gave me 1028 * 10^24 as an answer
1028 * 10^24 hm
i might've made a sign error somewhere.
oh yeah.
i did
oops!
plugged in 1000 where i shouldve had -1000
you won't get the last col as zero, az
there will still be a -1000 in the lower right corner after doing what you did
if you want i can explain what i did.
it would be nice
let $u = \bmqty{0\1\2\3\4\5\6\7}$ and $v = \bmqty{1\1\1\1\1\1\1\1}$, then we are asked for the determinant of the matrix $A = uv^T + 1000I$
Ann

is that much clear?
now if we consider the eigenvalues of $uv^T$, we get the following:
\begin{itemize}
\item 0, with multiplicity 7 (eigenspace consists of everything orthogonal to $v$)
\item $v^Tu = 28$, with multiplicity 1 (eigenvector $u$)
\end{itemize}
Ann

so we have that $\det(uv^T - \lambda I) = -\lambda^7(28 - \lambda) = \lambda^7 (\lambda - 28)$
Ann

to find $\det(A)$, plug in $\lambda = -1000$
Ann

I don't see why this doesn't work

if you subtract first col from last col you are left with [-1000 0 0 0 0 0 0 1000]
now add first row to last row and the last column becomes all zeros
@dusky epoch
you're left with -1000 in the top right corner then
damn
your second operation affects only the last row
this
it won't become all zeros like I said
it will become a diagonal
which we can easily multiply
differential n-forms are a type of tensor right?
What about their transformation properties?
how would something like $dx\wedge dy$ transform when changing coordinate systems?
Exynouz

well you'd look at how dx and dy transform
and then simplify a bit using some wedge product properties
Oh, so like this?
$dx \wedge dy = (\sin\theta dr+r\cos\theta d\theta) \wedge (\cos\theta dr-r \sin\theta d\theta) = -r dr \wedge d\theta$
Is there a way to represent this using Jacobians?
Exynouz

Using Jacobians is the way I usually see coordinate transformations being done
you have the right idea, yeah
although i think it should be x = r cos theta and y = r sin theta (i think you did it the other way around)
Could someone help me prove that this polynomial is LI?

there's no way to sum x^3 and x^2 to get x^4
I mean really what you want to show is that
ap(x) + bq(x) + cr(x) = 0 implies a = b = c = 0
so like just work with that
set up the matrix, row reduce and die cause row reduction sucks most of the time and then you'll see everything is 0
how was this last step simplified?

row reduction it seems like
i plugged it into a calculator to see but i got this

can someone help me with this?

except C and F i dont' know which ones are linear
that's also a valid row reduction, yes.
your first image provides a row reduction but not a full row reduction
whereas your second image is a full row reduction
i don't know why they didnt fully row reduce, hard to tell without context.
slimvesus

slimvesus

mirzathecutiepie

slimvesus

slimvesus

slimvesus

slimvesus

slimvesus

slimvesus

elementary matrices are basically row reduction matrices
ie you can represent a row operation with an elementary matrix
I mean you can use the 1st line to find the inverse of H
$H=E_1E_2...E_nI\implies (E^{-1}nE^{-1}{n-1}...E^{-1}_1)H=I$
they're the same thing. doing row operations is the same as multiplying by elementary matrices
you can use matrices that swap rows, add them up, scale them, etc
moshill1

so $H^{-1} = E^{-1}nE^{-1}{n-1}...E^{-1}_1$
moshill1

which is consistent with the 1st line, invertible H^-1 is a product of elementary matrices
Is matrix calculus considered on topic for this channel?
that's a better fit for multivariable calculus
If only it was covered in my multi-variable calculus class.
I don't even know if stewart calculus covers it.
Maybe parts of it.
what's the q

mhm
$d\theta = d(e'e) =?= e'd(e)$?
Steve3

you can try and see for yourself by expanding it as a sum
is this over the reals or the complex numbers?
This is the reals, is e' treated differently if it's a row vector?
over complex it's just conjugate transpose.
Edd

Yeah I know this.
this is literally the only thing you need though
now take the gradient w.r.t. e, which is the vector of partial derivatives w.r.t. e_n
The book has $d(x'y) = d(x)'y + x'd(y)$.
Steve3

So I'm guessing they skipped some steps.
you can also do it like that if you want and it'll be equivalent
Yeah but I'm trying to understand matrix calculus b/c literally everything in modern statistics/ml uses this language.
I guess it's a good idea to be able to translate back and forth.
it doesn't matter which one you use
i have to say that this is inconsistent regarding the vector dimensions though
What do you mean?
let's do it another way. look at what you wrote up there in terms of differentials
if you divide both sides by d(x)', it tells you the derivative of x'y w.r.t. x' is y + x' dy/dx
y usually does not depend on x, and so d(x'y)/dx' = y
you treat the whole of x' as if it were a single variable in your usual 1-variable calc
if y = x, however, the term x'd(y) is no longer 0, but rather x'd(x)
now, x' and d(x) are vectors of the same size, and that expression is a dot product that yields a scalar. over the reals, you can transpose a scalar and get the same scalar
so x'd(x) = d(x)'x
so now you have that d(x'x) = d(x)'x + d(x)'x = 2d(x)'x
According to the entry-wise definition of matrix multiplication,
$c_{ij} =[A_{m \times n}B_{n \times p}]{ij} = \sum\limits{k=1}^{n}A_{ik} \cdot B_{kj}$. Do I understand correctly that for $c_{ij} \in \mathbb{F}$, where $\mathbb{F}$ is a field, $c_{ij} \neq \langle a_{i \bullet}, b_{\bullet j} \rangle$?
For example, for complex inner product space V, $\langle \cdot, \cdot \rangle = w_1 \overline{z_1} + \cdots + w_n \overline{z_n}$.
In Einstein summation notation $c_{ij} = a_{ik}b_{kj}$. What's the name of that operation? Dot product, according to many sources, is defined either for real or complex vectors.
JohnDark

about the matrix calc?
Yeah I feel dumb not being able to figure this out.
i get paid to do it for a living
I even studied most of this in college just not all together.
(even though i'm terrible at it)
Honestly, if you have any resources on it it would be much appreciated.
I was reading from the book Matrix Differential Calculuswith Applications in Statisticsand Econometrics
I wish undergrad would go over this stuff as it seems important to literally all modern research.
But I've talked about this in the past and they say oh, it's just notation....
Everything you've said makes sense but I would have never thought it about on my own lol
they are inner products, you just define the rows of A appropriately so that the product takes that form. over the reals, you directly get cij = <ai, bj>. over the complex numbers, you let the rows be conjugate transposes of something.
i would agree there. all you have to do is write the stuff as a sum and differentiate one variable at a time
i don't have any good books on it off the top of my head, though wikipedia has a bunch of nice properties listed with no justification
the people in multivariable calc will probably have better suggestions, so give it a shot there
According to ``Linear Algebra Done Right" by Sheldon Saxler, inner product requires conjugate symmetry: $\langle u,v \rangle = \overline{\langle v,u \rangle}$ for all $u,v \in V$
JohnDark

mhm
And I'm not sure that conjugates are defined for fields.
in some fields they do nothing
Can I ask how you use this for work?
what you showed up there was the basic "least squares" or "pseudo inverse"
i tend to work a lot with so-called multi-channel image processing
stuff like x-rays, ultrasound, radar
if V is complex, then conjugate-symmetry is needed
in which you end up solving regularized versions of that same problem
Is minimizing $||Ax-b||$ the same as finding least-squares solution(s)?
moshill1

yes

@nocturne jewel I have to think if $a_{1k}b_{k1}$ is really conjugate-symmetric.
JohnDark

Conjugates are not defined on abstract fields, so conjugate symmetry cannot be defined as well.
maybe nami or someone else can comment. i don't know enough to answer your question
@lavish jewel Thank you anyway ❤️
According to the entry-wise definition of matrix multiplication,
$c{ij} =[A{m \times n}B{n \times p}]{ij} = \sum\limits{k=1}^{n}A{ik} \cdot B{kj}$. Do I understand correctly that for $c{ij} \in \mathbb{F}$, where $\mathbb{F}$ is a field, $c{ij} \neq \langle a{i \bullet}, b_{\bullet j} \rangle$?
For example, for complex inner product space V, $\langle \cdot, \cdot \rangle = w_1 \overline{z_1} + \cdots + w_n \overline{zn}$.
In Einstein summation notation $c{ij} = a{ik}b{kj}$. What's the name of that operation? Dot product, according to many sources, is defined either for real or complex vectors.
JohnDark

Inner product requires the definition of a conjugate, which is not defined on an abstract field.
Thank you, I was trying to figure out what this sum was for quite a while
And before I stumbled upon Einstein notation, I couldn't even conveniently write it down
mirzathecutiepie

mirzathecutiepie
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

I guess the only thing known about $a_{ik}b_{kj}$ for $A_{m \times n}, B_{n \times p}$ that $a_{ik}b_{kj}: \mathbb{F}^{m \times n} \times \mathbb{F}^{n \times p} \to \mathbb{F}$, if we abstract away from i and j
JohnDark

for finite vector space do c1f(a1)+...+cnf(an) = f(c1a1+...+cnan) = 0 then by bijective this is only true when c1=...=cn=0
first equality assuming ur isomorphism satisfy cf(a) = f(ca) but idk
so pick a basis a1,...,an
f(c1a1+...+cnan) = f(0) = 0
and if f(a) = f(0) then a = 0 since f is bijective, but that means c1=...=cn=0 since a1,..,an lin indep
now u pull the c out
ye so f(a1) through f(an) r indep
and ur done
they span too
like pick any other a in V then f(a) can be written as linear combo of f(a1) through f(an)
ye
i dont understand this pf

they say if B' = {a1',...,an'} is ordered basis then it is clear that... this part i understand, but i dont know how the next part works
doesn't this equality use the assumption that B' is an ordered basis, which is what the pf is all about

like first of all how do you know there is a B' such that i) is valid


ok i think i got itnvm
mirzathecutiepie

how should i go about showing this

Matrix D diagonal entries are matrix A eigenvalues and P colums are matrix A eigenvectors
(sorry for epic ms paint skills)
well
let's say P = [v_1, v_2, ..., v_n] where v_i are column vectors
and let's write λ_1, λ_2, ..., λ_n for the entries along the diagonal of D
your goal is now to show that $Av_i = \lambda_i v_i$ for $i=1,2,\dots,n$
Ann


yes
Im still confused where does the P^-1 come to play
$P^{-1}v_i = e_i$
Ann

that V_i is colum of the P? A= obviously matrix A and lambda is row of matrix D?
been trying to google this on math stacckexchange but with few success

Mathematics Stack Exchange
Let $X$ be an $(n \times n)$ matrix. Let $V$ be the $(n \times n-k)$ be the matrix of eigenvectors of $X$ which correspond to non-zero eigenvalues of $X$. Let $E$ be the $(n-k \times n-k)$ diagonal
basically this?
you are pretty much being asked to justify the first step that person took in the answer
just came to mind, probably wont affect this, but i found proof of this for real values, i think the same works for complex numbers too?
shouldn't make much of a difference here
im still a bit confused if this is called eigendecomposition or spectral decomposition
or they are synonyms
for a matrix, the spectral decomp is the eigen decomp
spectral decomp is more general

sure. it's the same thing you were given above 😛
well, also more general since they don't assume Q is invertible, though it kinda happens as a consequence
tbh im starting to think this "higher math" is just take some random D insert to these conditions and poof D matches them and the desired result is achieved
while im still thinking like in high school wtf is D and how i know i can put it here
numbers?
oh youre referring to the schur form
sorry, thought you meant the result from rep theory for a second
anyway, there's a variety of sources on the internet covering schur decomposition; it's a bit of a large algorithm to try and summarize over discord messages
a google search brings up this: http://web.math.ucsb.edu/~padraic/ucsb_2013_14/math108b_w2014/math108b_w2014_lecture5.pdf see section 3 for a practical algorithm
a more "naive" algorithm is just repeatedly gram-schmidt'ing
to generate an orthonormal basis
and that gives you the columns of your matrix eventually
(this is detailed in the big 7-part proof in my link)
is orthogonal matrix the same as orthonormal matrix?
Quite confused with the terms
Orthogonal matrix has orthonormal row/columns
then there is no such thing as orthonormal matrix?
some people say "orthonormal matrix" to mean "orthogonal matrix"
some sources even use the terms differently
one requiring square-ness and meaning A^-1 = A^T, which is equivalent to orthonormality of rows/columns
and another that does NOT require square-ness (hence A^-1 doesn't make sense without further work) [https://en.wikipedia.org/wiki/Orthogonal_matrix#Rectangular_matrices]
just stick to whatever definition your source/course/text is using
thank you
can someone explain why "it is now clear that R is uniquely determined by W?

proof of this, im losing the big picture

(the last paragraph)
like i understand everything before that but how that ties together to say R is unique row reduced echelon i have no idea
You understood how k_1 ,k_2,...k_r are uniquely defined by W?
Now,just use 2 rref forms are row equivalent,to show rref is unique
@zealous junco
Suppose there are 2 distinct rrefs call them A and B,atleast one row should be distinct. That row vector in B can be obtained from row vector in A,via some row operation

That's to show pivots of rref of the matrix will be in columns k_1,k_2...
For an example,Take
p_1=(1,2,3,4) p_2=(0,0,1,2)
k_1=1 and k_2=3
ok so since for all B in W, we can write B = (0,...,0,0,bks,...,bn) for some s = 1,...,r and bks≠0
is that what its writing?
Yes
i thought that was obvious by definition
of the rhos
wait i must be missing something, if rho_1,...,rho_r are defined as the row vectors of R so that their leading 1 is in column k_1,...,k_r, then why do you still need to show this?
If you just put those vectors as row vectors,You end up with a row reduced form
Not rref
i mean once you order them they are rref
Not really sure why he did that
oh anyways i dont understand this also
wait actually.. i think i do
so is it because of the fact about B he proved
if B≠0 in W then its first nonzero entries has to be in one of k_1,...,k_r, so if there was another R'~A with another rho that didnt have leading 1 in one of those columns then its contradiction
Do you understand why it's contradiction?
yea since the leading 1 would be not be one of k_1,...k_r so specifically 1*rho would be in W
right
Yes

this is false, a uniqueness questions is "Is T one to one"?
Meaning there is at most one solution for every c in R^m
someone check, please
what's a uniqueness question
whether the solution to Ax = c is unique

for this question i found that there is 2 solution for alpha and beta

but im confused if that is even allowed or i messed something
alpha can be (cosø,sinø) but that means beta = (sinø,-cosø) or (-sinø,cosø)
but they give 2 different coordinate
why you want to transfer to trig here
why won't you just show that these vectors are lin independent
which automatically make them basis
True. Let T(x) = Ax be a mapping for R^m |-> R^n. If for every c in the codomain of T there exists a solution x in the domain, then T is onto R^n.
Suppose i have B = {a1,...,an} and B' = {b1,...,bn}.

B is a ordered basis but B' starts off as any set
but I found P invertible so that $b_j = \sum_{i=1}^nP_{ij}\alpha_{i}$ for all $j = 1,...,n$, how do you show that B' spans V? To conclude that B' is the unique ordered basis by theorem 8 works on it
Anticipation

wait i think i figured
i show if c1b1+...+cnbn = 0 then ci's = 0 by invertibility of P
i need help for this

the half magic number is 1+1
if we remove 2 from every entry in the basis it should give -1 everywhere.//.
i think ur B is not the simplest but still possible
so for the first one [1 1;1 1] well what u get is [-1 -1 ; -1 -1] and that is -1a1+ 0a2
and for second one u get [0 -1; -1 0] which is -1a1+a2
so ur [L]BB should be just taking the coefficient of a1 and a2 for first line as first column, and second line as second column
is there a way to check if a matrix contains an orthgoonal sets?
to quickly check*
what would that even mean
if the columns of a matrix A are all mutually pairwise orthogonal then A^T A = diagonal matrix since you're looking at every combination of dot products
THANKS ALOT ANTICIPATION!

why they should not
yeah, makes sense
this way of thinking will also extend to having 2 parameters and being a plane
this way of thinking helps to take the plane to dimensions above 3
i mean az, if you want you can always visualise stuff by R^2 and R^3 since then you can generalize
yeah, I didn't think before about them as parameters
I knew it but it wasn't that bold for me
now it's easier to generalize from 2d/3d
Maybe non square matrices?
For square matrices,both are same
EEEE will be left inverse
You know linear transforms?
You know a linear transform from a space to itself is injective implies it's surjective?
That's why right inverses and left inverses are same(and both exist,if one exists)
You know you can represent a transform by a matrix?
and vice versa
If a matrix has a left inverse,it means it's corresponding linear transform has a left inverse
and same for right inverses
and vice versa
Yes
And there's one more very important theorem to finish this:
A function is injective iff it has a left inverse
and A function is surjective iff it has a right inverse
Take the matrix, let's say it has a right inverse
Take the corresponding linear operator,it will be surjective by that
So, It's also injective,which means it has a left inverse
which means the original matrix also has a left inverse
if a function has both left and right inverses,both will always be same
Yes
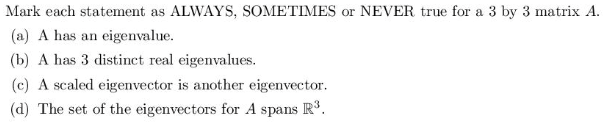
For A I got always, B I got sometimes
C always
D, sometimes
can someone check or counter prove any of them
seems okay
well
c might have to be sometimes, because i know there's sometimes some fuss over whether or not 0 is called an eigenvector, and 0 is certainly a scaled eigenvector
@waxen flume

az

can someone have a look, please
How do I test if a stochastic matrix is regular?
I know that A is regular if there is some power m such that A^m contains only positive values
(note A^m+1 could contain non-positive values, just there has to be at least one such m)
Is there a good test for this?
anyone happen to know what i'm doing wrong here? this is the question (i tried plugging in y=1 and z=1 after this attempt as well but it didn’t work)

and here is my work

when i plugged in my original solution from my work i was also marked wrong
Thanks @wintry steppe
@tiny palm how did you do the gauss pivot ?
Line 2 <--- Line 2 - 5 x Line 1
1 - 5(-4) = 21
You did a mistake
ohhh my gosh thank you, dumb mistake
no problem
so here
in this equation
Why do you only simplify 1/7 and 5
but not with (x - 1)
pretty sure u just can do
1/7 * (x - 1) = 5
x - 7 = 35
like thi
s
why not 7 * -1
i messed something up
lol
uhm
weir
d
lmfao
try equation* to get rid of the number
mirzathecutiepie
Compile Error! Click the reaction for more information.
(You may edit your message to recompile.)

who coded the bot
hm
okay
$\begin{equation}
\frac{1}{7} (x-1) = 5
(x-1) = 35
x = 36
\end{equation}$
Shaky
Compile Error! Click the reaction for more information.
(You may edit your message to recompile.)

Shaky

lol
i saw
it... sure looks that way
i also have no good leads about the volumes, other than saying "yeah it works in 2 and 3D"
must be some fancy trick to build parallelotopes
idk
or integration as you say
understanding it, on the other hand...

here's what you want
Mathematics Stack Exchange
Definition
If $x_0,...,x_n$ are $(n+1)$ affinely indipendent point of $\Bbb R^n$ (which means that the vectors $(x_1-x_0),...,(x_n-x_0)$ are linearly independent) then simplex determined by them is...
Mathematics Stack Exchange
Consider the simplex determined by the origin, and $n$ unit basis vectors. The volume of this simplex is $\frac{1}{n!}$, but I am intuitively struggling to see why. I have seen proofs for this and am
i didn't fully read nor understand it, but there it's done with integrals
why did you put equation* environ in $...$
they mean to ask why you used begin{eq} at all
i only realized right now xD
guess it makes sense if you wanted to get something that wasn't in-line, but there was no accompanying text anyway
throw in some page breaks
sooo, i may be in a worse position then i thought for this class lmao
Umm, can I ever use Cramer's Rule to test for linear independence?
Because if my system is homogenous then won't Cramer's rule just give me a determinant of zero for each solution?
why is this wrong? I factored -2 out of the denominator and then cancelled the terms in the numerator and denominator

and the reason its negative is because you get this: $$sqrt((1/-2)^2) = 1/-2$$
its the modulus right?
yes
request new nickname

|a/b| = |a|/|b|
is this correct
can you just cancel the square and sqrt
or does it produce 1/2
its 1/2
why
oh, i see. thx!
How do I do this???
If I let any arbitrary vector in R^3 = <u1, u2, u3>, then I get
<u1, u2, u3> = a<1, 0, 0> + b<0, 1, 0> + c<0, 0, 1> + d<-1, 2, -3>
Therefore,
a-d = u1
b+2d = u2
c-3d = u3
Letting d = t, we get
a = u1 + t
b = u2 - 2t
c = u3 + 3t
What am I supposed to get from that?

I mean, I guess we can tell that coefficients exist for any real parameter t?
Or that there is some parameter t for every vector in R^3 such that that vector is a linear combination of aS1, bS2, cS3, and dS4?
I mean, it clearly spans R^3 since you have the canonical basis of i, j, k vectors
and it's clearly dependent since the 4th vector is in the span of the canonical basis
So it’s not a basis for R^3
nope
But it does span R^3
Can you explain what the equations I got mean? I understand your explanation but I’d like to know if there’s any value in what I got
Or if it’s just nonsense
This sounds right to me but I’m not sure
I mean what you wrote was to see if the vectors span R^3, namely every R^3 vector can be written as a lin comb of the vectors
And they can, because there is a parameter you can find to get each coefficient?
Sorry if I’m not making sense
They can span R^3, cause a subset of that set is a basis
namely the 1st 3 vectors span R^3 (clearly)
Alright, I'll just use that then. Makes more sense anyways. Thank you Moshill!
For example, you shouldn't have to do much work for 32
given it's the exact same, the canonical basis of R3 is a subset
Okay 😁
what am i doing wrong?

request new nickname

yes it is a correct inpuit

yes, since -2pi/3 is between -pi and -pi/2, it's Q3
for this one I rewrote it as $$e^{2+4i\pi}e^{6+i\pi/2} = e^{8+i\pi/2}$$ but then when I solve $arctan(\frac{b}{a}) = \frac{\pi}{2}$ it has no solution?

request new nickname

that means it's a purely imaginary number
$Arg(z)=\pm\frac{\pi}{2} \implies z = bi, b\in\mathbb{R} b\neq 0$
oh yeah i see. thx!
moshill1


im not sure if this is right way to solve

so x is my coordinate of (a,b,c)
and P1,..P3 are columns of P, and ~ is row equivalent
cuz i found solution online that is different answer
idk why online solution put the alphas in rows rather than columns

doesn't matter
a matrix is invertible iff its transpose is
but the coordinate obtained is different
the coordinate matters though and idk if im wrong or solution wrong
ok nice lol i thought i did it wrong, yea cuz i got confused why solution put it in rows
for this example if R has rows of 0 then does that mean b4 in the boxed part can be anything? and the answer will be correct no matter the choice of b4 right

wait nvm
yea do you just place a placeholder for b4 to be anything? cuz u need the matrix multiplication to work out so the 3rd element in row vector cant be gone
Hi can i ask if a nxn matrix have more than n eigenvalues and how do i possibly proof it?
you can use the fundamental theorem of algebra and the characteristic polynomial to prove what ann said
oh right
so its not possible for a 1 dimension eigenspace be digonalizable if the det(λI−A)=(λ−2)squared * (λ−1)?
?
becos im not sure whether dimension eigenspace has to do with eigenvalues
...
det(λI - A) = (λ-2)^2 (λ-1) does not by itself prevent A from being diagonalizable.
but if i constrain it such that the eigen space is only 1 dimension will it still be diagonalizable
thats what im confused
if you know that det(λI - A) = (λ-2)^2 (λ-1) and that all eigenspaces of A have dimension 1 then A will not be diagonalizable.
ok i c thanks!

hyperplanes are n-1 dimentional affine spaces for an n-dimentinoal vector space right?
then doesn't that imply that if we rk(A) = 1 for that highlighted part?
i don't understand why rk(A) is necessarily 1 there
guys for eigenvectors, there would never be a standalone eigenvectors which is unique right? cos we are essentially solving for non trivial solutions of the homogenous eqn
eigenspaces have a basis, yes
can i say that eigenvectors is always a subspace?
eigenspaces are subspaces
but eigenvectors may not be?
moshill1

are eigenspaces always square matrix?
Not always
this is what i saw on my teachers notes

yes that's equivalent to finding the kernel
and it seems to suggest that eigenvectors is always a subspace?
kernel is a subspace i guess
E_o is called an eigenspace
the eigenvectors are any vector in the eigenspace associated with that eigenvalue
but wouldnt a whole set of the vectors become a subspace on its own for eg. (0,1,1),(0,2,2)...
one smaller than the eigenspace
is there a difference between kernel and subspace, my school hasnt mentioned this term b4
I mean hard to go one smaller than an infinite set
kernel means what gets mapped to 0, subspace is a subspace
$ker(A-\lambda I) = [A-\lambda I|0]$
moshill1

$ker(\lambda I-A) = [\lambda I-A|0]$ does it work the other way round?
amphibian sergeant

yes
so is there a relation between kernel and subspace or are they completely different concepts?
completely different
ok thks i guess its wrong for me to see eigenvector as a subspace
my teacher told me that anything with span(anything) is a subspace lol
yes span(something) is a subspace, but span(eigenvector) is the eigenspace not the eigenvector
does that mean that there are 3 eigenspace in this case?
or are they just grouped as one
oh ok i see so the eigenvalue is like a name for the eigenspace
hi can i ask if is possible for all symmetric matrices to form a basis?
all symmetric matrices
no, this set is linearly dependent
after all, it contains the zero matrix

we can show that f(x) + f(y) = mx + b + my + b = m(x+y)+2b = f(x+y) + 2b which contradicts the linear property of f(x+y) = f(x) + f(y)
The answer key of my book tho, gives another explanation that I don't understand.

can someone explain this and if possible make a connection with my solution so that I understand it?
linear functions take 0 to 0.
if T is linear, T(0) = T(0 + 0) = T(0) + T(0). subtract T(0) from both sides to get T(0) = 0
O that makes sense
linear functions don't translate by adding or subtracting, only through multiplication
the zero vector must always give zero for a linear function
for a linear transformation*
tired
why
I'm using wrong terms maybe
are you missing classes, kid?
yes
no good prof
pugh
O, just learned the correct terms
linear transformation vs. affine transformation
b = zero, b \neq zero

just speak about functions you know
especially upper arrows?
and proofs by pictures?
well but this is obvious from figure abc
,ban vimes
This may only be done by a moderator!

"Proof: obvious from figure 145"
figure 145: contains the proof in the caption


@wintry steppe look at this amazing proof of bolzano-weierstrass

isn't this obvious?
you forgot the entire proof in the caption
sorry this is left as an exercise to the reader

well many profs tho do proofs by "obvious"
well but i used such books so mainly it was indeed obvious
"the proof is obvious if you read the proof"
"the proof is obvious if you write the proof"
can someone look over a proof for me?
Go ahead


T(x,y,z)=(z,y,x)
T^2 =/= T right?
wot
cause T^2 = identity
F
I have an example that works I don't need help with that
I just wanted to prove that such a T is always diagonalizable

I used this fact which I am allowed to assume
(I mean the proof of said fact is in the textbook which is why I'm allowed to assume it)


I don't think that's necessary
Isn't it tho?
Nvm,it is
cause then I get v = u-w rather than u + w
Yea, That's clearly true
and I guess I could work with that but direct sums are better worked with as sums :P
Since you are multiplying (T-I)v=0 with -1 on both sides
dope
In general,intersection of distinct eigenspaces is always zero subspace
if im given two vectors
2x1 + 2x2 + x3 - x4 = 0
how do i setup the matrix to find the basis
i forget it its straight across or vertical
can someone help w/ my question in the #multivariable-calculus its also related to linalg
Correct me if I am wrong, is square matrix multiplication commutative when one of the matrices is a diagonal matrix?
nah it fails
Example?


multiplying by a diag matrix from the right scales the columns. from the left, it scales the rows
Despite the seizure you seem to be having I see the issue
only matrices that always commute are multiples of identity matrix, AFAIK.
yea quick way to see the scale column/row is to remember 2 ways of matrix mult
AB, then first way is linear combo of rows in B by reading off coefficients of rows in A
just read linear mappings no need in matrices yknow
and then theres lin combo of columns in A by coeff of columns in B
Hmm, this definitely presents some problems with what I am doing :/
hm thats nice way to see it actually
Actually, there aren't any issues here. I can make this work. Thanks!
I have this operation: m^2 + n^2 where m and n belong in Z and I want to check if this operation have an identity element
Is this a linear algebra question 🤔
am I looking for this? an element such that: g^2 + e^2 = g
this is from my lineal algebra course, sorry if this is not the place
Also, if m and n are the identities, then 0 is indeed the additive identity here
Ohh, I see the dilemma. Yea, not sure how well this fares for you
@crude falcon Since you are in the integers, this is the same as finding the roots of
$g^2-g+1=0$
dackid

wait
but g^2 != g?
this cannot have idenity
yeah, thats what Im guessing
And the roots of this equation is not in the set of integers
In any case, you will have exactly two elements that satisfy this equation
this only possible in integers only for 0
But it will not be true for all the integers
Yea. Here is my way to go about it: assume the additive identity exists in Z. $Let k\in\Z$ be the additive identity.
Then $g^2-g+k=0$. This equation has exactly two solutions and is therefore not true for all the integers, regardless of the value of k.
dackid

i understand this reasoning
but I'm not following you there
why do you use g^2-g+k=0? since the operation is just m^2+n^2?
In that case the quadratic would be $g^2-g+k^2=0$. But k is constant so the argument is exactly the same
dackid

ooh I see now
You are trying to show an identity element e.
So $g^2+e^2=g$. I am saying if we assume e exists, let e=k for some integer Z.
dackid

alrigh thank you!
btw isnt this really lineal algebra? its about algebraic structures
This is definitely abstract algebra
To find inverse of a matrix, in one book they used the method where they would write square matrix and attach an identity matrix to it, and then use row reduction to turn the original matrix into identity, then the identity matrix would become the inverse of the original. Is this generally true or does it work for 3x3 / some special matrices?
it is generally true if i understand you correctly
you mean they take A
then make an augmented matrix [A I] and do rref on it?
if so, then yes this method is applicable
It just gets extremely tedious very quickly
It's better than adjoint/determinant tbh
Adjoint is messy, but pretty straightforward. But there are certainly better options yes
Like matlab?
I like the product of elementary matrices approach. Probably not the most efficient of all the options, but I do like the option
I'll Google that, thanks wholesome guy that draws but who's name I'll never be able to recall
pablo picasso i think
Thanks, I can't remember names ever.
Guys I am having trouble

I know I have to find out the length of the base of the triangle
How do I do that
Basically how do I find the length of the bottom side of the triangle given the height and slope if it
this ain't linear algebra

There are lines on the picture, close enough \s
I have this set A = {-1,1} with the multiplication operation, and I want to check if the set is asociative
How can I do it? I would need 3 elements right?
or can i just do (-1 x 1) x -1 = -1 x (1 x -1)
no, I'm checking if that set is an algebraic group or not
and for that I want to see if its asociative
OK, I'm not that far
np
rly? isnt any analytical/abstract way to do it?
im lazy
like the way I put it shows its associative for that given example
if you're really lazy you could say something something inherits associativity from integers? idk
mm I dont think thats allowed for this exercise
then brute force it
associativity is always boring
can't think of much
set theory? elementary algebra?
matrices/systems of ecuations
those are typically things you learn in linear algebra, no?
systems of ecuadors
Ik my school was supposed to teach matrices in Alg II but they cut it out cause of remote learning
honestly the main thing you need is comfort doing algebra
also basic set theory i think, idk
i'd be surprised if that wasnt taught during the LA class.
Are the identity matrix and a number conmutative?
Like I * 5 = 5 * I
Its an i, not a 1
yes those are both 5I
So a matrix with just a diagonal of 5s and the rest is 0?
yes
Ok, thanks
Anyone could help me explain the Null space and column space basis?
I still dont get the Null space

The null space is the set of all vectors $\vec{v}$ such that $\textbf{A}\vec{v} = \vec{0}$
LifeSource



Quick question: Are you Polish?
No
Oh
Решение систем линейных уравнений (матричный метод, метод Гаусса), исследование на совместность
That is what I am using
Oh
idk why is Polish there
XD

{kind=link}
{kind=link}
Yes
Well, going back to your example, you want to first get rref
The augmented matrix makes things confusing

The augment is unessisary
and?
Then you get it of the form $\begin{pmatrix} 1 & 3 & -9 & -1 \ 0 & 1 & -3 & \frac{-3}{5} \ 0 & 0 & 0 & 1 \ 0 & -10 & 30 & 4 \end{pmatrix} \begin{pmatrix} v_1 \ v_2 \ v_3 \ v_4 \end{pmatrix} = \vec{0}$
LifeSource

I know that, what's next?
You write it in equation format as you did
next
Well, the one that was done by the calculator is not quite right
It accounts for the augment
the augment here should just be all 0s
that's irrelevant, I know how to write the general solution
what I need to know is how to write the null space basis
Would you have time for a voice chat?
You get $\begin{cases} v_1 + 3v_2 - 9v_3 - v_4 = 0 \ v_2 - 3v_3 - \frac{3}{5} v_4 = 0 \ v_4 = 0 \ -10v_2 + 30 v_3 + 4v_4 = 0 \end{cases}$
I can't rn
LifeSource

Yeah, that's what I wrote down
Good
Then, you know how to write the general solution? Right?
Get the pivot variables in terms of the non-pivot variables
Yes, and what do I do with the x4 = 0
is that part of the Null space?
Yeah, this wail require more Khan Academy
What you do is you want to set each individual pivot variable equal to 1, and all others equal to 0
Then you solve for you non-pivot variables
is x4 = 0 a non-pivot?
Sorry, I mean the other way around
Yeah, not a single youtube video address that instance
It might help to watch a video
wft do I do with a row that has a single 1
Is that part of the null space, yes or no?
Yes! It is always the fourth component of the vector!
Yes
thanks
According to the picture I posted above
This is what i'm writing and its create a matrix [1,0,0;0,1,0;0,0,1]
But i'm getting it incorrect
what language is this?
matlab
az

is that correct?
yes
thanks, vimes
np, az
maybe a stupid question, but ive got [cost sint], and i reparametrize it with t = 2 sin^-1 (s), that limits t to -pi/2 to pi/2. how do i get past this domain restriction?
What would make it possible to express a vector u as a linear combinations of v1 and v2 in more than one way?
v1 being a scaled version of v2

Ax=0
When A is LI, x is 0.
Why is x=0?
Prof asked this in class today, but I can’t figure out why
All I think can think of it’s because columns of A are LI, the matrix is full rank
another way to see it that when vectors are linearly independent, their corresponding matrix of coeffs has no free variables.
Or you can see it this way: for a non trivial solution to the equation Ax = 0 to exist, there must be scalars c_1, c_2,... c_{n-1}, not all zero, that multiplied with n-1 columns of A, will produce the nth column (we assume that the nth is the dependent column)
This will allow us to have a sum of all columns equal zero, where the scalars are not all zeros.
But if we can't produce such scalars, not all zeros, we end up with the trivial solution.
My classmate said similar lines but apparently that’s not what he wants
He’s asking like “why”
And I have got no more ideas
is he looking for a proof based on the linearity of A?