#linear-algebra
2 messages · Page 190 of 1
alright thanks
If you perform the gram-schmidt process on a set of 4 vectors in R4 and the resultant third vector doesnt equal to 0 while the 4th vector equals to 0, does it mean the set of vectors is linearly dependent
Yes
If the original non orthonormal set is {e_1,e_2,e_3,e_4},this would mean e_4 is in span {e_1,e_2,e_3}
wait so that means the original set spans a 3 dimensional subspace?
a set containing the 0 vector is always dependent I believe
nice,thanks
Any strang reading group?
theres a strang worship group

What is a dualspace, How do you visualise it ?
you mean in general or do you have a particular scenario in mind?
dual spaces and vector spaces come in pairs
You can't just isolate a vector space and call it "a dual space"
@lavish jewel Idk I think about it like the space that gets spanned when you take the dot product between for example 2 vectors
in the case of vectors over the reals or complex numbers, you can think of the dual space as the space of conjugate transpose vectors of the same dimension
what you said is just the base field
so the space that gets ( for example ) by the columns of a hermitian matrix ?
no matrices involved
hmm, then I didnt understand you 😦
say you have R^{n} as your vector space
uhm ok
its dual space contains all the linear functionals that take vectors in R^{n} and give you back a real number
a vector of n real numbers
you can think of its dual space as R^{1 x n}
Is a dual space a vectorspace ?
so for example you have the dot product between
(a,b,c) * (1,2,3) so you put a value in a b and c, you just get the one dimensional number field, is that a dual space, just our basic numberline ?
So the dual space is just R ?
so R^3 ?
in this case, it looks just like R^3, yes
ahhhhh, so it either could be C^3 right ?
these are only the easy cases though
since vectors and vector spaces can be more abstract things, so can their dual vector spaces
wdym mean with abstract, I dont think there is an abstract way to think about a vectorspace tbh
what about the vector space of all polynomials of order 5
Hmm wdym with polynomials, do they span a vectorspace as well ?
how come, can you give an example ?
i would rather not
just don't make the mistake of thinking that linear algebra is about putting numbers in curly brackets 😛
matrices and stuff like [1, 2, 3] are just a special case
lmaooo, but how can I understand it then ?
do you know how a vector space is defined?
yeah
enlighten me
aight
a vectorspace V over a certain field F is a commutative group V which is equiped with a compositionlax F x V ==> V, (f,x) ==> fx
which has certain conditions
1x = x
f(x+y) = f(x) + f(y)
.....
I literally wrote the definition of my book
I might have made translation mistakes but I think its understandable
right, so the book goes on to list some conditions, right?
exactly
anything that satisfies those conditions is a vector space
so, you don't have to visualise vectorspaces ?
indeed
you can try to if you like, since you can probably put it into a nice vector/matrix form using a nice basis
but the idea is that the definition is abstract so that you can apply it to anything that satisfies it
hmm, so does that mean that it is not possible to visualise ( for example ) a polynomial space or is it because it satisfies those conditions ?
as i said, if you use a basis that makes the visualization nice and pretty, it can be useful
hmm alright thanks, I have another question.
How would you determine the dimension of a polynomial space ?
for example
R(x) = 1 + x + x^2
How do you determin its dimension.
And how would you be able to put these in a matrix if you dont have a system of equations ?
make up a nice basis and follow the same ideas you already know
for example, a nice basis for the polys of order two is {x^2, x, 1}
that poly you wrote up there is a single "vector", so that is dim 1
you can then make a correspondence like 1 + x + x^2 -> (1,1,1)
and the basis vectors are (1,0,0), (0,1,0), (0,0,1)
and now the polys of order two look like the vectors and matrices you know
idk what you mean by the first part
ah nvm
I misread your answer my bad, Ima delete my question
so the basis you have chose {x^2, x, 1} is enough to find all of the vectors that satisfies that polynomial, am I right ?
no
the basis allows you to represent all polynomials of order 2, including yours
the poly now has coordinates in that basis. and the coordinates would be different in a different basis for the same space (polys of order 2)
thanks man I understand it, can I ask you one more question ?
according to the defintion and the condition which vectorspace must satisfy, we can tell that vectorspaces are all linear. But what makes a polynomial a lineair function, when I think of a linear function I always think of function that has degree 1.
I don't think that all polynomials are linear, only polynomials f(x) = ax are linear I think
eduuu exactly, thats what I think
but then you shouldnt be able to apply it to polynomials with higher degrees yet in my book they do
a polynomial alone is a nonlinear function of x
but the only thing i did up there was say that you can write any polynomial of a given order using other polynomials and linear operations
nothing else
The elements of your vector space do not need to be linear as well @viscid kernel
ooohhhh so the polynomial space of R(x) = 1 +x + x^2 is the space spanned by {x^2, x, 1}
so the vector {x^2, x, 1} is itself linear, right ?
Try seeing things this way: Consider the set IR2[x] as being the set of all 2nd degree polynomials. Then 1 + x + x^2 is an element of IR2[x], as well as other polynomials: 1, 1+x, 1+ x^2, 1-x+3x^2 etc..... The set {1, x, x^2} spans the whole set IR2[x], but {1,x,x^2} is NOT a vector, is a set of vectors belonging to your vector space IR2[x]
{1, x, x^2} is a basis for IR2[x] because Its vectors are linearly independent and it spans IR2[x]
That means that every vector (in this case your vectors are the polynomials of IR2[x]) can be expressed as a linear combination of those vectors, for example: 2 + 5x - 4x^2 = 2 * (1) + 5 * (x) + (-4) * x^2
how do you know the vectors of {1, x, x^2} are linearly independent ?
and so the coordinates of 2 + 5x - 4x^2 in that basis will be (2,5,-4)
3 vectors x,y,z are linearly independent iff the only solution for the equation ax + by + cz = 0, is a = b = c = 0
In this case we want to solve the equation: a + b.x + c.x^2 = 0
in this case note that we are dealing with an equality of function, in the lhs e have the function a + b.x + c.x^2, and in the rhs we have the null function 0
two function are equal iff they have the same output for every x
Yeah but in this case its impossible for them to be equal to zero, but what if you gave values to x ?

Consider the functions sin(x) and cos(x)
They are linearly independent as well
consider the equation: a sin(x) + b cos(x) = 0
This equations need to hold for every x
to if x = 0, you get:
a sin(0) + b cos(0) = 0 -> b = 0
if x = pi/2
a sin(pi/2) + b cos (pi/2) = 0 -> a = 0
because the only solution is a = b = 0, then sin(x) and cos(x) are linearly independent
by that logic, none of the canonical bases for polynomials would be bases, since 1=1=1^2=1^3=etc
aight I think I see where I misunderstood you in the example of the basis given in the begining {1, x, x^2} I thought that you could assign a value to x, so you just have to see 1 as seperate vector as well as the other elements right ?
hmm understood that part but as I progress I forget the beginning lmao
{1, x, x^2 } so why the dimension of this 1 ?
it's not
there are 3 vectors, so the dimension is 3
dimension is just the size/cardinality of a basis
Aiight
i said the dimension of your polynomial was 1
@lavish jewel I see, I tricked myself xD
$\mathbb{R}[t]_{\leq 2}$ has basis ${1,t,t^2}$ which means it has dimension 3
moshill1

I know understand why my professor thinks differently about vectorspaces
I used to think of it as line, plane, hyperplane, cube through the origine but its not enough
So my last question
The polynomial space is the space spanned by the set {1, x, x^2 } right ?
i mean, the coordinate vectors will still have that meaning
the polynomial space of bounded degree of 2, yes
@nocturne jewel thanks
also @lavish jewel @drowsy idol thanks for helping me out as well
You're welcome 🙂 @viscid kernel
Lmao I started my question of what dual spaces are and started a discussion about polynomial spaces
and with that in mind, the dual space of polys is a thing
and not as straight forward as doing a conjugate transpose, as it was before
@lavish jewel do you mind giving me an example of a dual space ?
dual space to {0} 
0_-
That would be the dual basis for the dual of all 2nd degree polynomials
right? @lavish jewel
in this case k = 2
*k = {0,1,2}

I don't understand why more than two free variables is still visualized with a plane through the origin.
wouldn't three free variables give us a shape with volume?
because R^3 is the highest dim space available for direct visualization
unless you can visualize a 3-dimensional hyperplane in R^4 faithfully
in which case please let me know how you did it because i wanna be able to do that too

yeah? 3 free variables in R^3 would just give you the whole space
couldn't we visualize 3 free variables in R^4 in 3d space then?
metal, explain
what happens if we take 3 vectors in R^4 with 3 free vars?
you know az
Commander Vimes

this is called equation of n-dimensional hyperplane
unless you can visualize a 3-dimensional hyperplane in R^4 faithfully
in which case please let me know how you did it because i wanna be able to do that too
the answer is "you can't"
az, that means that 3 free vars will give 3-hyperplane
I'm not trying to disprove you
but you are free to think of it as behaving similarly to a 2d-plane embedded in 3d space
I'm trying to understand it
a point on a line, a line in a plane, a plane in 3d space, a... cuboid in ????
past 3d, you could try to get creative with stuff like a line of cubes, a plane of cubes, a cube of cubes, a line of cubes of cubes, etc
but that is all very arbitrary
this succession was really helpful for me to think about it
yeah, whenever you're doing hyperdimensional stuff you really just want to think about it with a lower-dimensional metaphor
when our solution set becomes a 3d space itself, we need to have a higher space to hold it
which we can't visualize
does that make sense?
yeah
cuz then you have several disconnected 3d spaces, you need an extra dimension to move between them
🤮
thinking about it
why?
can't digest
yeah, probs at some point, I need to stick to the definition and let go of mental visualizations as is
my go-to is always planes inside a cube
@wary lily are u from belgium ? Cuz I think my friend uses the same textbook rn.
can you elaborate on this?
no, I'm self-learning from a few books, actually.
Aight
but I'm interested what year/major your friend is with this book?
that's Lay's book, iirc
@wary lily he is now second year engineering, but he still uses that book. In his 1st year he used that book for the subject linear algebra.
Ik, 😦 cant eat it now cuz Im on a diet

@wary lily also to have a spacial image, Id suggest you watch the essence of linear algebra on youtube
if you're in a lower dim subspace of a vector space, it's like having a plane inside a cube
and anything that is not on the plane casts a shadow on it
Sign up with brilliant and get 20% off your annual subscription: https://brilliant.org/ZachStar/
STEMerch Store: https://stemerch.com/
Support the Channel: https://www.patreon.com/zachstar
PayPal(one time donation): https://www.paypal.me/ZachStarYT
►Follow me
Instagram: https://www.instagram.com/zachstar/
Twitter: https://twitter.com/ImZachSta...
hyperplane is a very generous and flexible word, so it applies to any dimension
This video might help you visualise
Isnt hyperplane used for 2+n dimensional planes cuz I think you cant say a line is a hyperplane tho
i chose my words carefully
a point is a hyperplane on a line
a line, one on a plane
and so on
^this analogy is sooo good
Aight, Understood
OK, thanks
I think I understand the subject good enough at this point.
Haven't learned Vector Spaces yet.
So, save some for later, as it wouldn't make much enough sense to me rn.
much appreciated

lol
😋😋😋😋
off to BaklavaJail until after diet 
Lmao 🤣🤣
vector spaces 

you want to express each element of the second basis as a linear combination of the elements of the first
Hmm what do you mean by that
you have two bases of a vector space
each element of one basis can therefore be expressed in terms of the elements of the other
so write 1 - 2t and -1 + t as linear combinations of 1 + t and 1 + 2t
trying my luck: you want a matrix that if multiplied by one basis you get the other basis
that matrix multiplication is the same linear combination that TTerra says
a 2 * 2 matrix
Yeah its a 2x2 matrix answer
I'm used to actual vectors so when these bases for P
come in
I get confused
I don't know what it means to write them as linear combinations
I know what linear combinations are but in this case I'm just blanking
az

by the definition of a change-of-basis matrix, the columns of the matrix will be the coordinate representations of 1 + t and 1 + 2t in terms of 1 - 2t and -1 + t. i got it backwards here
that's the matrix multiplication/dot product expressed as a linear combination @edgy kelp
it's the same
You can just grab the coefficients and represent them as vectors
so 1+t
[1,1]
1+2t
[1,2]
Yeah I know that @wary lily my thing is how would I have turned 1+t into a matrix

What does vech mean in this context?
I assume it has something to do with echelon form, but I have only come across reduced row echelon and row echelon form?
I think its half vectorization
Ok thank you
There is a question which comes to me now, I know that if a matrix M of dimension n, has n distinct eigenvalues then it is diagonalizable.
But what about a matrix M of dimensions 3x3, which has 3 eigenvalues, but 1 of multiplicity 1 and another of multiplicity 2.
It is not diagonalizable?
A matrix which has eigenvalues with multiplicity is not diagonalizable?
a matrix which has eigenvalues with multiplicity is not diagonalizable
this is false
to talk explicitly about the 3x3 case, take, for example, a 3x3 diagonal matrix with two diagonal entries equal
that's certainly diagonalizable, and has an eigenvalue with multiplicity > 1
May i get help
for the 3x3 case, if you have two distinct eigenvalues and one, let's call it λ, has algebraic multiplicity 2, then there are two things that can happen
- λ has geometric multiplicity 2, in which case the matrix is diagonalizable (this is an iff)
- λ has geometric multiplicity 1, in which case the matrix is not diagonalizable, and can only be put in jordan form
(geometric multiplicity = dimension of the eigenspace corresponding to λ)
just ask
I do not understand these two cases 1) and 2). If a matrix is of size 3x3 it has 3 eigenvalues, if it does not have 3 eigenvectors -basis- then it is not diagonalizable
However, if it has one eigenvalue of multiplicity 2 and one eigenvalue of multiplicity 1, the matrix has indeed 3 eigenvalues in total.
But we cannot know if it is diagonalizable because we do not yet know the eigenvector base
In the examples 1) and 2) that you gave, we have the impression that the 3x3 matrix must have either an eigenvalue of multiplicity 2 or an eigenvalue of multiplicity 1. It is not clear
But we cannot know if it is diagonalizable because we do not yet know the eigenvector base
diagonalizability is equivalent to algebraic and geometric multiplicities agreeing for every distinct eigenvalue.
Your explanation of case 1) and case 2) is not clear. At the beginning you say that the matrix has 3 eigenvalues. Okay.
- In the case 1) you talk about one eigenvalue of mulitiplicty 2, where is the 3th eigenvalue ?
- in the case 2) you talk about one eigenvalue of multiplicity 1 where is the 2nd and the 3th eigenvalue ?
i said at the start there are two distinct eigenvalues. one of them has algebraic multiplicity 1, so it also has geometric multiplicity 1. therefore, if we want to discuss diagonalizability, it suffices to look at the other one, i.e., the one of algebraic multiplicity 2
there are indeed three eigenvalues
but i am considering the distinct ones
one of them is repeated

do you know rank-nullity
Sorry is not clear
Nope @wintry steppe
- λ has geometric multiplicity 2, in which case the matrix is diagonalizable (this is an iff)
- λ has geometric multiplicity 1, in which case the matrix is not diagonalizable, and can only be put in jordan form
so here, rank A + nullity A = 7
that's what the rank-nullity formula says, at least for this specific example
Oh wait rank is 4 right?
A 3x3 matrix can have λ has geometric multiplicity 2, and λ has geometric multiplicity 1 you dissociate the two in two cases, it is not clear at all, there is a problem in the wording of your explanation
there u go
does the onto mean anything?
I prefer to speak of algebraic multiplicity for no confusion
yeah, it means the rank of the matrix equals 4, in this case
i.e. the image is all of R^4
(assuming the matrix has real entries)
i guess in more "matrix-y" terms, the column space is all of R^4, so then rank A = dim (col space of A) = dim R^4 = 4
Ah okay
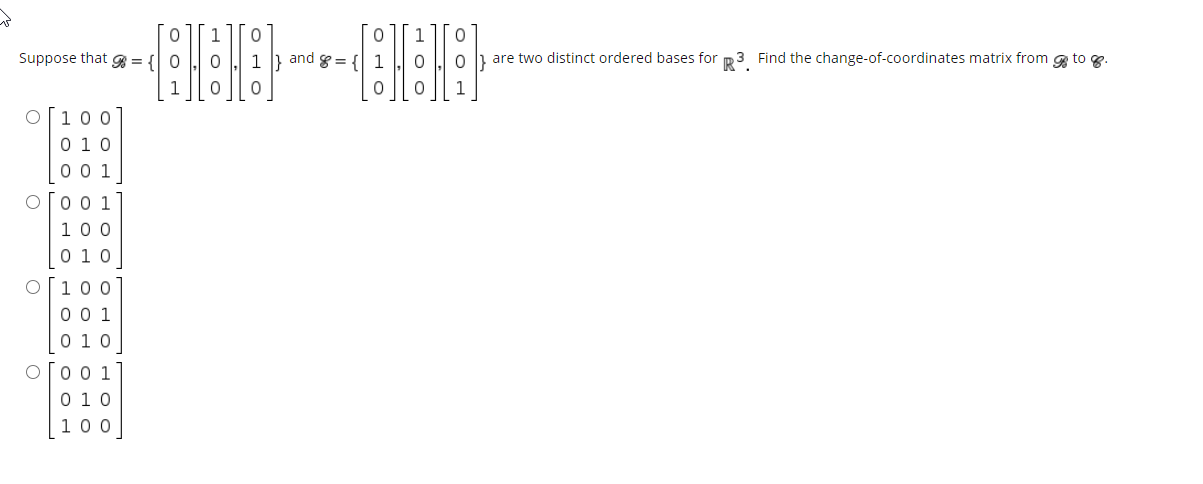
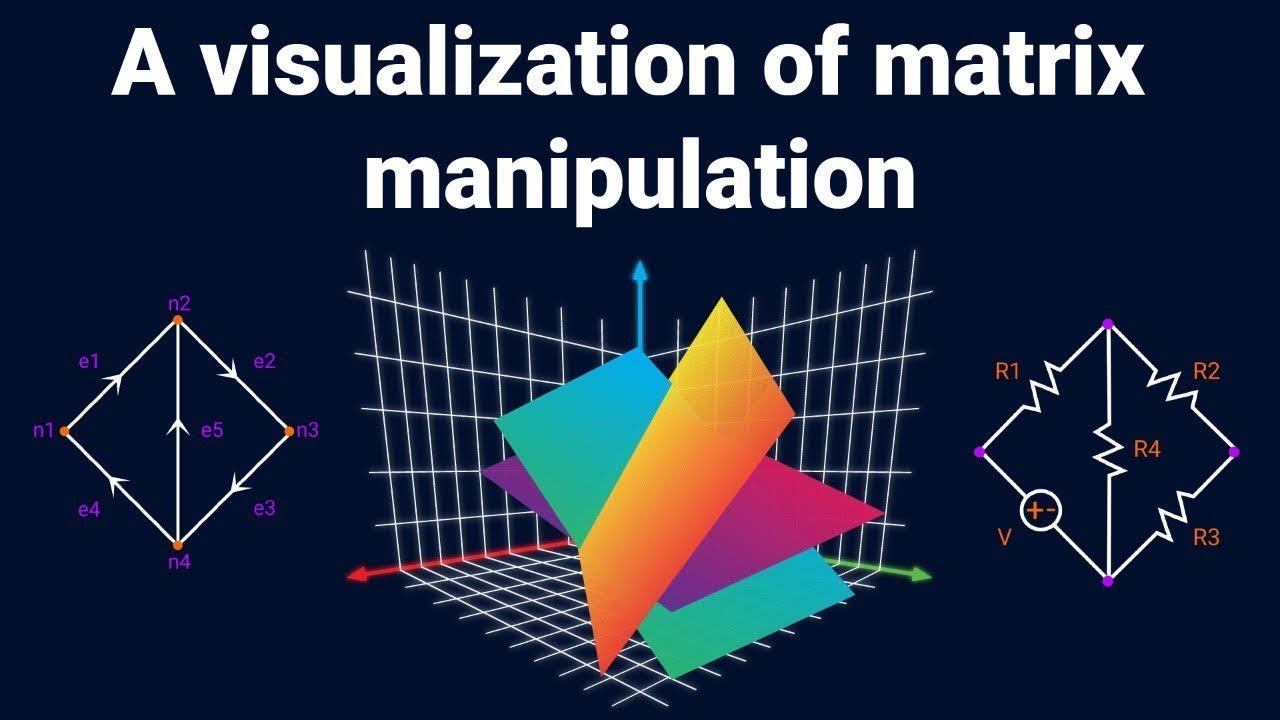
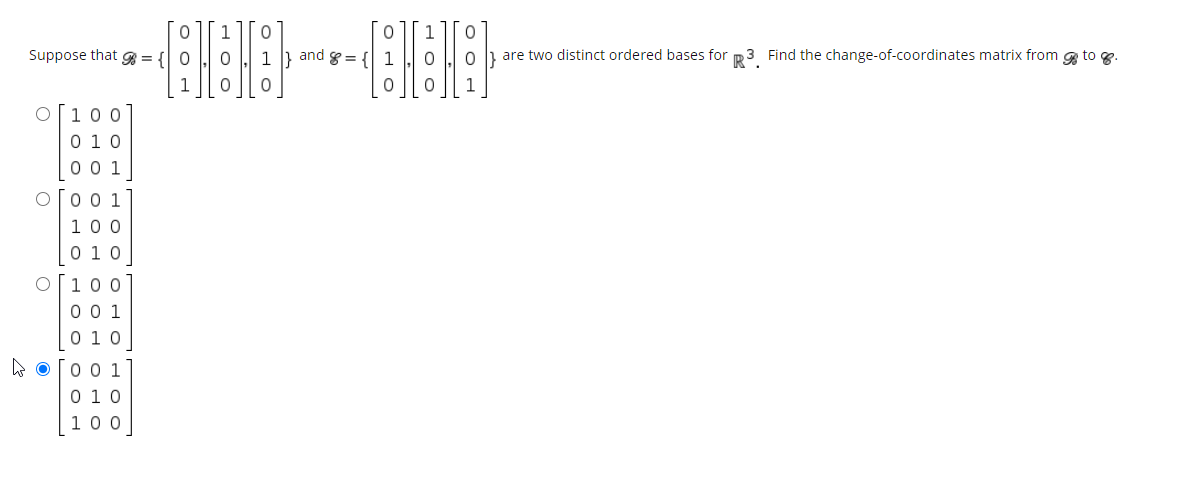
For this question, I remember my teacher said just put it in a big matrix
and rref it
But when I did that
I got this matrix
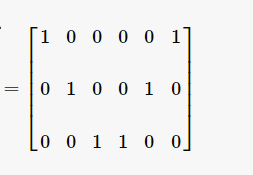
lol
Does that mean anything lol?
Yeah
you dont need to do any row reductions here
the columns of the change of basis matrix will be the representations of the elements of B in terms of those in C (if i'm reading the \mathscr right)
so, for example, how do you write (0, 0, 1) in terms of elements of the second basis?
keep in mind the ordering
Um
multiply the inverse of one of them with the other sort of thing

the inverses?
makes that sense, TTerra?
of those two?
So I can take the B matrixes and then take the inverse
of it
and multiply it to C
I see
Left mult inverse of A on both sides and you get the Transform matrix that takes you from A to C
seems right
After doing the work
changing bases 
Hello, I should find two non-similar matrices in $\mathbb{R}$ with characteristic polynomial of $(x-1)^2(x^2+1)$
Any idea?
Bardak

Is an injective linear map ( in lineair algebra ) the same as bijective linear map.
if the domain and codomain have the same dimension
otherwise
no
e.g. x -> (x, 0) from R to R^2
even worse
the only linear map {0} -> (your favorite non-trivial vector space)
Help? 🥺

They ask me to show that this matrix is not diagonalizable on R and on C.
I calculate the characteristic polynomial, find the eigenvalues and the eigenvectors and I show that this matrix is not diagonalizable on R.
But how to show that it is also not diagonalizable on C?
compute the eigenspaces and their dimensions and show that they don't agree with the multiplicities of each eigenvalue as a root of the characteristic polynomial
by this
It’s what I said but on R
what?
what i said goes for matrices over any field
diagonalizable iff algebraic and geometric multiplicities coincide
They ask me to show that the matrix is not diagonalizable on R and on C. If I have to show that it is not diagonalizable on R by saying what you said, then it is also automatically not diagonalizable on C
?
so if it is not diagonalizable on R it is not diagonalizable on C?
diagonalizable iff algebraic and geometric multiplicities coincide
that's what I said. But they ask me on R AND on C
not diagonalizable over R does not imply not diagonalizable over C
e.g., 2x2 matrix for rotation counterclockwise through an angle of pi/2
what did the characteristic polynomial come out to?
I have the impression that you did not understand my question :/
I will explain
okay, can you clarify it?

Question: Show that this matrix is not diagonalizable on R and on C
My answer :
P(X) = -(X - 2)(X-1)² . We have two eigenvalues X_1 = 2 of multiplicity 1 and X_2 = 1 of multiplicty 2.
I now calculate the proper subspace (I do not know the word in english) Ker(A - 2 I_3)
And I find and only find Vect( 4 e_1 - 2 e_2 + 3e_3)
Conclusion:
The dimension of Ker (A - 2 I_3) which is 1 is smaller than the algebraic multiplicity which is 2. The matrix is therefore not diagonalizable on R.
Now they ask me about C
Because the question is on R AND on C
i think in this case, the argument
(not diagonalizable over R) implies (not diagonalizable over C)
works, because R contains all of the eigenvalues of B. if this is true, then you are done. let me verify this
high power approach: all of the eigenvalues of B are real, and B is not diagonalizable over R, so B has a jordan form considered as a matrix over R, which is not a diagonal matrix. the jordan form is invariant under field extension, so it also has this jordan form over C. therefore, the matrix is not diagonalizable over C, since its jordan form over C is not diagonal
but note that you can't use this argument if B's eigenvalues are not in R, as in this example. this one's eigenvalues are i and -i, which are not real
if you don't want to nuke
note that the algebraic multiplicities of the eigenvalues don't change when you pass to C. should the geometric multiplicities change?
Here I can not use this? The eigenvalues are all real, no ?
(not diagonalizable over R) implies (not diagonalizable over C)
if i am correct
you can use this
i was just making sure of it
and noting, with an explicit example, that it's not always true
Ok thank you
hi
i wrote something pretty small and i wanna know if it's correct
netherrite wrench guy
:3
ok idk


Could anyone help me out on a problem I'm working on
just ask
Uh I asked it in questions-2
@wintry steppe
But not sure if it will get a response
Since someone said to put non hs/calc stuff in subject chats
Sorry?
Basically I need to characterize f such that the form mapping a vector from fn[x] times fm[x] (polynomial fields of degree m and n respectively) to the integral from 0 to 1 of pqf is bilinear and nondegeneratr
So that should be equivalent to integral 0 to 1 of x^k*f
=0 for any k
For degeneracy
Is there a difference when determining leaset square solution using the differential method vs AtransposedAx = Atransposedb?
Does anyone know how I would get the additive inverse of X as shown above
Yeah set u+v=0 and solve for v
So 0=u+v-2
V=-u+2
I guess sorry u+'v=0 or w/e since I can't type that symbol
Okay someone asked me to reformat my question
'Let Fn[x] be the R-vector space of polynomials of up to n degrees'
Thanks!
'Characterize continuous f(x) such that T:Fn[x]*Fm[x]->integral from 0 to 1 of p(x)q(x)f(x) is nondegenerate, bilinear'
Proposition: T is nondegenerate iff kerT=0
Ker T =0 iff T(eij)=0 for all basis elements eij of some basis for Fn[x]*Fm[x]
Consider the basis defined by {1, x, ... x^n}*{1, x ..., x^m}. Then the condition is equivalent to integral from 0 to 1 of x^(k)*f(x) =0 for k=1...m+n
I don't know where to go from here besides integrating by parts, but I don't see how that would give me a useful way to proceed either.
I reformatted it and moved it to a subject chat
<@&286206848099549185> does this work in terms of formatting?
I think integration by parts and induction translates the condition into something like: the first m+n+1th antiderivatives G with G(0) = 0 satisfy G(1) = 0 @rotund aurora

what is this Vect() operator? and what do you mean by supplementary?
according to google, the french notation is weird
is this like, "V2 is the subspace spanned by these 3 vectors. find its orthogonal complement."?
I don’t know What is supplementary or complementary in English
In french is « supplémentaire »
Hello, I should find two non-similar matrices in $\mathbb{R}$ with characteristic polynomial of $(x-1)^2(x^2+1)$
Any idea?
Bardak

@red ether can you tell me which properties should this Vect(e_4) you mentioned have with respect to V2?
az

yeah
if this is only a question about interpretation, this is where "null space" and equivalence classes are nice
thanks, Edd
haven't learned null space etc. yet, but heard about it
like the solution here is the set of all points on the line that is created but the intersection of two planes and it's called null space or kernel or whatever
don't know it yet
just notice that Ax = b having infinitely many solutions x = [4,-1,0] + x3[3,2,1] can be seen this way
since the part with x3 solves the homogeneous system, as you said, that means that we can just say x_n = x3[3,2,1] and that Ax_n = 0
and then let x_c = [4,-1,0]
so Ax = b has solutions x = x_c + x_n
that in turn means that x_c ~ x_c + x_n
so that Ax = A(x_c + x_n) = Ax_c + Ax_n = b + 0
I'm fully following until here
are you setting x_n equal to the trivial solution 0?
in that case I understand x_c ~ x_c + x_n
then this line follows naturally
in A(x_c + x_n), we could also see x_n = 0, then we'd have A(x_c + 0) = A(x_c) = b
x_n in this case is equal to x3[3,2,1]
you said that solves the homogeneous problem, yeah?
yes, it does
so A(x3[3,2,1]) = 0, yeah?
yes, for any x3 in R
mhm
so x_n doesn't just include 0
it also includes x3[3,2,1]
adding that to another vector won't change the result when you multiply by A
x_c ~ x_c + x_n, what does that curvy symbol mean here?
presumably, edd silently defined $x \sim y$ as $Ax = Ay$
Ann

very silently indeed :3
you just learned what a null space is, btw 😛
hahah
that would be x_n
Oh
let me describe it in my own words
a null space is the set of points in R^n for which the solution of a system of equations/a matrix multiplication of size m * n, is the same regardless of the choice of point from that set.
what is stinking?
so i'm gonna say instead that it just smells
cause it's not bad enough to say it stinks
it's an intuitive description, not mathematical, I think
the null space is the solution to Ax = 0
you overcomplicated it
it's the solution to the homogeneous system
I was trying to understand it
intuitively
for advanced people, saying homogeneous tells it all
bc they can connect with that term from different perspectives
that's bc experience
for beginner, they need other real world analogues to reach that level of understanding
it's just we are at different levels
the word homogeneous throws me off, idk
hahah
i just think of what it implies
"the null space of A is the solution set of Ax = 0"
vectors in the null space are orthogonal to the rows of A
to me this sounds like a perfectly good and succinct description
^ this makes sense to me now. After I went through my layman description.
in order to not memorize, our brain needs to connect our previous knowledge with new pieces in a logical way
once Ax = 0 and null space become familiar ideas in my hed, I can use them as such pieces.
you will now think of ann whenever you hear "null space" for the rest of your life
hahah
i mean isnt this just the defn of nullspace
definitions are what you need to have on instant recall

Ann
Do you know What is « supplémentaire » in English ?
Je pensais « supplementary » but not many people understand this word

Donner une base d’un supplémentaire dans R^4 pour chacun des sous espaces vectoriels suivant
uh
i'm guessing a ``supplémentaire'' of a subspace $V$ of a vector space $E$ is another subspace $W$ such that $V \oplus W = E$?
Ann

Yes I think
aha, so it WAS the ortho complement
For V2 j’ai dis Vect(e_4) for supplementary
no, not the orthogonal complement necessary.
I dont know if it’s good
any direct complement will do.
i see, thanks for clearing that up
So vect(e_4) is correct for V_2 ?
can't tell at a glance
is e4 a linear combination of the vectors V2 is given as the span of ?
if not, then you're good.
Yes, but sometimes I'm wrong in my calculations so I'm not sure. There may be several supplemenrary . I don't know if Vect (e_3) and Vect (e_2) also work

checks out, captain
e2 and e_3 also work, and indeed, any vector linearly independent from the ones that span V2 will work
Ok thank you very much
I noticed that whatever (random) vector you put it gives you a matrix with 1s on the diagonal and 0s everywhere on wf 🤔
if you choose a truly random vector, then yes
random vectors are linearly independent with high probability
Yesterday I had an exercise that looked like, I chose a random vector and it didn't work

vect(e_4)
if you generate a vector following something like an i.i.d. gaussian distribution, it'll probably work
hey guys, can i ask that how to prove this theorem?

pick a basis of ker L and extend it to a basis of R^n
show that the images of the elements you added on constitute a basis of the image of L
this is like the most important result in intro linear algebra  surprising they're asking you to prove it
surprising they're asking you to prove it
another way to go about it is to use the first isomorphism theorem and then count dimensions, but it ends up being basically the same proof if you don't know the dimension of a quotient space
can u be more specific about "pick a basis of ker L and extend it to a basis of R^n" ?
choose a basis {v_1, ..., v_k} of ker L
you can then find vectors w_1, ..., w_{n-k} in R^n such that {v_1, ..., v_k, w_1, ..., w_{n-k}} is a basis of R^n
now look at {L(w_1), ..., L(w_{n-k})}
yes
do you know why tho?
yes
it's very important to see the connection between equal statements in LA
det(A) = 0, there is no inverse, etc...

what confuses you?

I understand the first form: x = a + tb
but with the second and third I have a problem
so, t is the parameter for the free variable
second form is just first form written explicitly
consequently, the exist a free variable x_3 = t
put a = [-2,0], b = [-5,3]
third form is just representing coordinates of x as system of functions
wym
wait why you are speaking about free variable here
t here is just parameter
you have a vector-valued function from R to R^2 if that is easier for you to think about
t, the parameter, is what is put in place of the free variable, no?
I was thinking about it the other way around
going from the answer to the problem
like this

is a system
isn't it?
x_3 = t, is implicit
in the above two equations
isn't it?
Commander Vimes

then f is parametrized vector
it is system of functions
Commander Vimes

but why
ahah, then the solution will be different
no
this system is already in RREF
the only thing you need is to move free variables to right
I now see the problem with my thinking
I was assuming that there is a third row of zeros
but there is not
I can't imagine that arbitrarily
if there was an x_3, then there was such a row
but I'm given a parameter
there is no guarantee that t represents x_3
and the vectors are in R^2 which is proof that there doesn't exist such a row
@dire thunder does that make sense?
if you are fine with that interpretation then yes
i am not really understanding what you mean tho
like when I'm given an augmented matrix like
1 0 0 1 0 1
0 1 0 0 1 2
and write the general solution for this
I know that there are 3 free variables
well
and the vectors of the solution will be columns of 5
and we have two basic variables
those free variables become s, t, w or whatever
Commander Vimes

and?
the vectors of the solution would be 5 entry columns
2 for the basic variables and 3 for the free
in the problem that I brought earlier
there were 2 basic variables and one parameter
that parameter, I imagined, was a free variable expressed as such
you can arrive at parameter from system of equations

yes, true
hello everyone, i have a doubt about determinants: can i say that $\det( AB) \ =\det( A) \ *\ \det( B) \ =\ \det( BA)$ since multiplication is commutative?
<eo

yes, if by "multiplication is commutative" you're referring to that of real numbers
yes, real numbers
ok ur in the clear
we haven't covered complex numbers yet, so I don't know what I should say to be clear
well i'm bringing this up because matrix multiplication is far from commutative
but that of real numbers, or complex numbers, or of elements of any field, is
det(AB) = det(A)det(B) = det(B)det(A) = det(BA)
thanks Terra, very clear :)
how could I prove 4?

prove that if $Lv = L\hat{v}$ then $L(v-\hat{v}) = 0$
Ann

i have a question if you have two matrixes with A*B=I why does that implicate that the function Kn->Kn with x |->Ax is surjective
for any element y in K^n, we can write A(By) = y.
(by associativity)
hence y has preimage By under the function.
so every element of the codomain has a preimage in K^n, hence we have surjectivity
this principle holds in general, in fact; it doesn't just apply to matrices/linear transformations
a function is surjective iff it has a right-side inverse
(in this case, that inverse is multiplication by B)
thanks a lot 🙂
What is F ?
You know that the determinant is the only (up to a multiplicative constant) n-linear alternate form
Maybe it can help idk
Yeah ok
Well then it is an homomorphism, are you looking to find a characteristic that only the determinant has ?
Good question !
Prob
I really dunno what can be said

Mathematics Stack Exchange
This might be a dumb question; I know only enough group theory to be able to ask dumb questions.
Ken W. Smith has pointed out that one way to get intuition about the determinant is to observe that...
lie theory 
the derivative of det is trace
any homomorpsim has derivative a scalar multiple of trace
integrate
any homomorphism factors through det
given some linear transformation T what does $T_A$ mean?
Crown

here's an example, nvm i got it

anyone able to point me in the right direction for this question? I drew the rhombus and labelled my points. I was thinking that maybe C=2(M-A) but thats all i've been able to come up with

E is very obviously not LI.
oh really?
uh yeah? if you just add the two vectors in E you get zero
i'm a retard
Hihi, have a question.
Is the following true?
λ is an eigenvalue of A if and only if there exists infinitely many u such that Au=λu.
Depends on the field
If it's a finite field,There could be only finitely many such elements
Oh I see thanks!

it depends on what you mean by direction. in some books, direction is a unit vector. in others, it's the angle
you have to be aware that the arctan cannot give you the angle in any quadrant, though
you can take arctan(abs(b/a)) and then adjust the angle based on whether each of a and b were positive or negative
I'm going through some lectures on tensors and I'm having trouble connecting the definition with an 'intuitive' understanding of tensors as n-dim arrays.
When working with machine learning frameworks, one works with 'tensors' all the time. I.e. if I have a collection of 256 images of size 256x256, I can store it in a [256, 256, 256] tensor. I can retrieve the components by indexing in the appropriate slots (e.g. pictures[7,0,0] gives the value of the pixel at the upper left corner of the eight image).
I feel fairly at home working with 'tensors' in this manner, but I cannot reconcile this understanding with the definition of tensors as multilinear maps that take in p vectors and q covectors to produce an underlying field element. I understand that it only makes sense to speak of components of a tensor under a choice of (dual) basis for the underlying (dual) vector space, but what would the p and q be for the [256, 256, 256] example?
to be fair, that is technically wrong
putting the data in a multidimensional array does not make it a tensor
a tensor really is a mapping between vector spaces
what it actually looks like does not matter
a matrix or an n-way array (or what you're calling a tensor) can do exactly the same operations
the underlying linear map can be represented in more than one way
you can "unfold" these arrays into vectors if you want and it's equivalent
say you have, for example, an N x N x N array, as you wrote. you wanna map it to some other thing of size M x N x P x Q
because why not
a linear map from N x N x N to M x N x P x Q is a tensor
independently of if you make it an N x N x N x M x N x P x Q entity
or if you represent it as a matrix acting on really long vectors
or use just sums and products
Fair. ML frameworks love to call these things tensors, and I understand that in a sense it's in name only - the same way in CS a vector is just an array of elements, not necessarily an element of a vector space. I'm just trying to see to which extent can the two be reconciled or understood in light of one another.
they cannot be reconciled all that much 😛
Lol, your answer is helpful though
i do ML and sigproc as well and all of this stuff is a pain in the ass
every 20 years or so, some dumbass "rediscovers" linear algebra and calls stuff a new name or shuffles up the names
It's weird because I have used 'einstein summation' functions in those frameworks, and stuff like
torch.einsum('ijk, ij->ik', x, y) has been very expedient at times, makes for concise yet understandable code
No, bc then the zero vector needs to be a solution in which case b = 0, which is not. Is that right?

if b is a linear combination of the columns of A, then x is a linear combination of the rows of A
you could decompose x = x_c + x_n
the x_c part can be a plane through the origin, can it not?
it also depends on what you mean by plane. strictly in 2D, i think it's only possible in 2D
if it's a hyperplane, it can happen in higher dims
take all of this with a grain of salt, i'm half asleep
I think they are talking in 3d
from the context and level of the book and chapter I deduce
yes this is the second-best possible explanation
the first-best is "x=0 is not a solution of Ax=b"
ah i was thinking of every b treating it like a vector space
when they explicitly told you to exclude 0
anybody know a good way to motivate jordan and/or rational canonical forms?
at least for jordan canonical form, I just motivate it as "the closest thing to diagonalize that we can do sometimes"
reasonable enough
seems harder to motivate rational canonical form tho
a consistent system is linearly independent if and only if their null space is a single point
is that correct?
does that make sense?
I think "linearly independent" is a term used to describe a set of vectors and not a system of equations
the null space is that of a matrix and not of a system
sounds a bit sloppy, so can you properly rephrase ?
yes, let me think
the vectors composing the coefficients of variables in a linear system form the columns of the matrix A in Ax = b (which is the system). Those vectors are linearly independent if and only if the solution to the always consistent homogenous equation Ax=0 is unique
Those vectors are linearly independent if and only if the corresponding homogeneous equation Ax=0 has only the trivial solution.
A homogeneous equation has a unique solution if and only if it is the trivial solution.
Bc the trivial solution is always in its solution set.
true, that's a bit more precise indeed 👍
your wording is correct
yeah, I just made it more specific
thanks
helped me get that down
Np
is the scalar product in spherical coordinates the same as in cartesian?
pretty much yep
nice ty!
rational canonical form is just a funny thing that falls out of the fundamental theorem of finitely generated modules over pid
:petthecat:
dat beastars pfp


hi, how can you find the slope-intercept form if the slope is undefined?
define "undefined". Is it like a division by zero undefined or like undefined in terms of numbers but x_1, y_1 x_2, y_2?
it says here to determine the equation of the line in standard form given the slope and the y-intercept. the slope is undefined and the y-intercept is 7.
this is suited for #prealg-and-algebra but you define a variable, say m, as the slope and use the point slope formula.
or rather the slope intercept in this case
but doesn't make much difference
so it will be x=a?
let's move this to #prealg-and-algebra
okok

this is true, since for two vectors to be lin. dep. one needs to be a multiple of the other, which implies that they are vectors with the same direction and possible magnitude
is this correct?
if they go through the origin the zero vector is within their span
which would mean they are dependent
this doesn't answer my question, but I think your reasoning is wrong. Two vectors can go through the origin and be independent. Going through the origin doesn't imply dependency.
The zero vector has always the trivial solution.
Ax = 0 always work for x = 0
Commander Vimes

can you check my answer and reasoning?
(1,0) and (-1,0)
dependent
diff direction
(1,0), (-3.0) the same but also diff magnitudes
but you are right that they are multiples
true, didn't think of the change in direction when the sign is flipped
can I say: for two vectors to be lin. dep. one needs to be a multiple of the other, which implies that they are vectors with the same absolute direction and different magnitudes.
having the same direction only means they are parallel
what was written up there writes one vector as a line with the direction of the other vector and passing through 0
yes, parallel vectors through the origin with different magnitudes
not necessarily through the origin if all you say is "same direction"
what i mean is you haven't fully justified why it must go through the origin
this is more of a thing with how we handle/draw vectors, no?
what is wrong with just saying: one vector is a multiple of another
that is, one vector is just second one stretched
nothing wrong
the problem, I think, stated it as vectors through the origin to stir confusion and make one think

how could a segment that is orthogonal to U be the basis of U???

shouldn't b · (p-x) = 0 since they are perpendicular??
oh my brain just couldn't use english
i thought the text said p-x was the basis and got confused
sorry lmao
I mean
T' takes in functions Y -> K and outputs functions X -> K
That's what the dual space is
It's just that, it's not composition that's happening between T' and I
I think that's the problem yeag
Is there any difference between a dot product and Euclidean inner product? If there is, what is that?
mirzathecutiepie

for linear transformations, you can express them as matrices and associate them from the left
Smells like Notation
it's the same as transforming one transformation with another
mirzathecutiepie

mirzathecutiepie

l is a transposed vector, then
Wait so this is (T'f)(x)=f(Tx)?



Yes, That's true
Matrix multiplication wise,There is no distinction
Although T'l and lT are not defined simultaneously
Since l has dimensions 1xn
Let's say T is n x m
Then T' will be m x n
You can't multiply m x n with 1 x n
Except when n=1
Yes
they did that in para 1 lol
Ok, I am not wise enough to understand the ways of lax
it says 11 is already a matrix product
looks like the same notation denotes something new, but it happened much earlier than you thought
that doesn't seem nontrivial by this point though
lol


mirzathecutiepie

kinda, yeah. Tx is another sum

Hoffman Kunze is much easier to read
than lax
and I don't think you are losing anything
i'd suggest to write Tx as another sum
also T'l
dunno about clean, but it should indeed work
It's very clean



so far so good
mirzathecutiepie

what's r here
and i'm guessing you mean (l,cj)
cuz otherwise this is cursed
same on the rhs
yea, that would be the idea
idk anymore

this is still pretty cursed cuz that looks like multiplication of stuff that can't be multiplied, but as long as you're consistent...
yeah but
one of those things is a scalar and the other is a matrix
when you move l to the right you're doing an "outer product"
lcj is fine
one of the two
lemme see again
yeah
right, cuz your row is a column
lol
you can't just move l around like that
the dual space looks like a transpose when you write this crap as vectors
do you use f(x)
you'd be better off using lax' notation here tbh
lol
everything as columns and using ( . , . )
this looks like something you would find in that book

Matrix product could be defined as $[c_{ij}] = a_{i1} \cdot b_{1j} + \cdots + a_{in} \cdot b_{nj}$. Is this sum The inner product of the vector space? It seems that Wikipedia says that for vectors with complex entries dot product can be defined either as $a \cdot b = \sum \overline{a_i}b_i$ or as $a \cdot b = \sum a_i b_i$. Considering the sum as the dot product seems to be unnecessarily abstract, not to mention the inner product of a vector space. Bilinear form seems to be off too. What the f... is this sum?
JohnDark

Thank you, I would appreciate it a lot
wait nvm, it actually does look like a definition via inner products
in einstein notation, the repeated index is summed over
According to Axler, inner product is a binary operation that satisfies certain properties
And I'm not quite sure how they relate to properties of matrix multiplication
It's an inner product of the ith row of A and the jth column of B
I don't think there's anything new to be gleaned from this point of view though
Shouldn't be there additional properties?
Not sure what you mean by that

I more or less understand how matrix product is computed
I'll throw away the garbage and come back when I can explain the question clearer
each entry in the result will have all the properties you're familiar with, if that's what you meant
You could prove the usual properties of matrix multiplication through this I think
Like how matrix multiplication distributes maybe
can i say that matrix is an orthogonal projection matrix if i can write it as a sum of the outer product of orthnormal basis vectors(for some vector space)?
I know that an orthogonal projection matrix is one that is equals to its hermitian and its square but a projector is basically this sum i mentioned. So does it suffice to find such summation to say that a matrix is an orthogonal projection matrix?
sounds ok to me, that would be something like U U^H for a matrix U with orthonormal vectors, which is idempotent and orthogonal to its null space
alright, thanks!
how can i use parseval identity over a fourier serie?
Do I understand right that the sum $C_{ij}= A_{i1}B_{1j} + \cdots + A_{in}B_{nj}$ is not an inner product for $A_{ij},B_{ij},C_{ij} \in \mathbb{F}$ because $\langle A_{i \bullet}, B_{\bullet j} \rangle = A_{i1}\overline{B_{1j}} + \cdots + A_{in} \overline{B_{nj}}$?
JohnDark

what are A,B, and C?
$A \in \mathbb{F}^{m \times n}, B \in \mathbb{F}^{n \times p}, C \in \mathbb{F}^{m \times p}$
Matrices over a field $\mathbb{F}$
JohnDark

$A_{ij}$ is an element of a matrix $A$ in row $i$ and column $j$


By the virtue of being a field, $\mathbb{F}$
\begin{itemize}
\item Is associative under addition: $a+(b+c) = (a+b)+c$
\item Is associative under multiplication: $a \cdot (b \cdot c) = (a \cdot b) \cdot c$
\item Is commutative under addition: $a+b=b+a$
\item Is commutative under multiplication: $a \cdot b=b \cdot a$
\item Has additive identity: $a+0=a$
\item Has multiplicative identity: $a \cdot 1 = a$
\item Has two distinct elements for additive and multiplicative identities: $0 \neq 1$
\item Has additive inverses: $\forall a \in \mathbb{F}. \exists \mathbb{-a}. a+(-a)=0$
\item Has multiplicative inverses: $\forall a \in \mathbb{F} \vert (a \neq 0). \exists a^{-1}.a \cdot a^{-1}=1$
\item Is distributive over addition under multiplication: $a \cdot (b +c) = (a \cdot b)+(a \cdot c)$
\end{itemize}
JohnDark

Hmm a field is more restrictive than a VS right? Cause both multiplication and addition between elements is defined??!
I'd say they're kind of different
It might be helpful to check that all fields are vector spaces over themselves
@granite yacht
Huh wat??? Vector spaces over themselves? As in it’s sufficient for a VS to be a field
R is a vector space over R for example
mm i see why R is a VS over itself makes sense but ye i think get what ur saying


I was thinking when a_2 is not a multiple of a_1, then the converse must also be true.
But the second matrix in the answer key then doesn't make sense.
Are they considering the case that a_1 is the zero vector?
yes
OK, thanks
O, I just understood why there was no talk of a codomain in calc but we specify the codomain in LA.
in calculus your codomain was almost always R
In calc, especially single variable, we always deal in R, so the codomain is always R, there's no need to specify it.
yeah
making this reference in textbooks may be helpful for student understanding
but maybe profs do that anyway
how did we know that U is the base change matrix here... I mean how would i apply it here to make a base change?

that's what lines 3.12a and 3.12b are saying, just write that as one matrix equation
Does anyone here use Kahn academy

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}