#linear-algebra
2 messages · Page 189 of 1
but since it's least square doesn't b not equal Ax
so then you can't write b as something in the range of A with svd

nvm nvm
yes, using CAS
yeah, you only get the component of b that was in the column space of A
the other one gets mapped to the 0 vector
you need to specify b = bs + bn and x = xs + xn
some of those get mapped to 0, others not
wym by "solve matrix"
What is the projection of some vector v on a unit vector u
How come it’s not just they inner product multiply by u
|u| cos(theta) = (u . v)/|v|
that's the "shadow" of u on v
the magnitude
that's multiplied with v since v is unit already
in case it isn't unit, you divide it by |v|
which result in this formula:

that's the same as they wrote up there, just with u swapped with v
apparently they ran into some case in which (v dot u) u with unit u didn't work?
what's CAS?
Gaus Jordan Elimination to get S_0, S_1, etc expressed in variables
RREF it using your favorite software
otherwise, the rows actually look kinda friendly
you can start from the second to last equation parametrizing stuff and back-substituting
RREF online calculator shows this

as final answer
but doesn't make sense does it?
did you augment the matrix?
nah, it's square
otherwise, at least you know for sure the problem has a solution
first row appears to be headers

this kinda seems to say there is no solution, then?
it does
i'm hypoglycemic at the moment, so if anyone has more insight than i do, feel free to correct me
that's what it looks like to me lol
hmmm might have to take a step back and check the equations i made the matrix with
I was wondering tho, when a system has n variables and n+1 equations, for it to have a solution, at least one row needs to be a multiple of another, right?
then that row doesn't apply any constraints and we get down to n euqations.
either a multiple or in general a linear comb., yes
that's pretty much what the definition of "consistent" means
just think about linear eqs in terms of dimensions of domain and codomain of linear map

For part b, if the set of 3 vectors are linearly independent then they form a basis
does that make it sometimes or always?
are vectors always lin indep?
no.
sometimes?
yeah
so, sometimes 😛
thanks @lavish jewel
no prob
is $n=4$ in both $z^4=(re^{i\theta})^4$ and $z^{\frac{1}{4}}=(re^{i\theta})^{\frac{1}{4}}$?
why are you raising theta to the 4th power 
$(re^{i\theta})^4$
Ann

also to fix the error you need to write \& and not just &
ah
what is n supposed to be?
the number of roots
ahmad_11

there we go , thx
any ideas?
maybe im just thinking of it the wrong way
basically the question is if you have something like find all the roots of z^4=16, then yea n=4 and theres 4 roots but if its something like (1+sqrt(3)i)^1/2 why are there 2 roots to that
every complex number other than 0 has two square roots
it's an immediate consequence of fta
right
maybe a substitution would help make it more clear?
say you have z^4 = w
the solutions of that are the z = 4throot(w)
right
that makes sense
and if you have z^1/4=w then the solutions to that are z=w^4
i guess doing it backwards requires you to be careful
if you are already given one of the roots for that, there is only one way to raise that to the 4th power
but you have to be aware there are 3 other roots that will give the same result
since the two problems are linked
so it depends on whether you start with z or with w how you go about it
why haha
this is your chance to make up for it
that's the spirit
my personal experience has always been pretty similar. find a cool new topic, realize i don't know anything or i had a ton of misconceptions, cry myself to sleep, start understanding the stuff, enjoy the profits
i guess sometimes that's just how it goes
i'm a lowly engineer
doing a phd, which probably puts my math level somewhere around like 1st or 2nd year undergrad mathematician at best
signal processing
xD nice


@wheat prairie which part do you mean?
i just don't know how the first simplification was done
$\hat{\Phi} w = \begin{bmatrix} \Phi w \\ \sqrt{\lambda}I_m w \end{bmatrix}$, yeah?
Edd

if you subtract $\hat{y}$ from this you end up with $\begin{bmatrix} \Phi w - y\\ \sqrt{\lambda}I_m w \end{bmatrix}$
Edd

now you multiply this from the left by its transpose and you're done
ah, with a factor of 1/2, apparently
@mortal juniper i cannot give you the answer, but i can help you think of a special case. what happens if the rank of the matrix A is r < n < m?
in that case we cannot cross multiply the matrices right?
wdym cross multiply
dot product?
that's not a dot product tho, if A is a matrix
@brazen venture we don't speak mandarin here, sorry
sry i was explaining
mud?
you said something that began with cao ni ma which to my knowledge is the chinese equivalent of "fuck your mom"
maybe they were explaining how to do that
i don't understand what you mean
Not sure if this counts as linear algebra but if I have 3 vectors and I know they share some plane, how does one find that plane?
is null space equivalent to trivial solution?
you can use the Gram-Schmidt process
@tulip glacier nope
that's kinda cursed, you don't need to go that far
bringing a shotgun to a knife fight
huh cursed?
i was answering poropichu and brandon
what is Gram-Schmidt process? sorry this was just something from a calc course so it might be out of my league
just make or take 2 lin indep vectors
and take their cross product
this gives you the plane's normal
lol
I was told to find the determinant of <1,2,3>,<3,4,5>,<6,7,9>
isnt both null space and trivial solution solving for Ax=0?
just wondering if after gram-schmidt process, can {v 1, v2, v3, v4}
be normalized to become an orthonormal set?
Yes
how do i show the proof for it
You all are speaking in tongue to me ;V
is this something you learn in linear algebra though?
What do you wanna prove?
becos i cant really show my prof how to prove this statement
the trivial solution always exists for that. the null space always contains the 0 vector. it can contain other stuff too, though, depending on the matrix
but then if we transposed the column vector where does the transpose come from. I mean it is imp for dimensions to match but I don't follow the math
the whole gram-schmidt process
its on google
yeah ik but i was just curious if you learn that in linear algebra
lol my school didnt even bother to differentiate them for me... 
oh, you meant you didn't know where any of it came from
yeah sorry xD
the 2 norm squared of a vector can be expressed as x^T x
you can see that carrying that product out will give you the sum of the squared elements of x
so if x = phi w - y, it gives you the sum of squared differences
if you minimize that, that is the "least squares solution"
oh no i know this part...
the solution that minimizes the sum of squares of the differences
so which transpose did you mean?
like i know how the summation of square differences is transformed to matrix
i just don't understand how to deal with vector of matrices like here
it's the same thing
phi w, even tho phi is a matrix, yields a vector
since it's multiplied by w
you mentioned multiplying this by its transpose, the simplificatoin of this confuses me
sorry if my question was unclear
if you pay close attention, that vector has another vector as the first element, and yet another vector as the second element
so writing it like that really means it's a really long vector
or a "block vector", as some call it
alternatively, if you treat it as if it were a vector containing two elements u and v, then you can do x^T x = u^Tu + v^T v
where u and v are the stuff up there
you know, phi w and sqrt(lambda) I w
so sort of instead of multiplying the whole thing we split it up
i mean, the whole thing IS multiplied
just like you would normally multiply any x^T x
yeah i just mean since this is basically like the dot product you can split it up
first element squared plus second element squared, etc
yeah exactly and here in the simplifcation it is two elements squared, namely phi*w -y and sqrt(lambda)I * w
right?
i think i got it now, thanks!
aight
What does onto and one to one mean?
I kinda of know some of their characteristics, but I'm not entirely sure what it means for a matrix to be either
3blue1brown spoiled me
linear algebra is just linear transformations of space
all the visual intuitions make so much sense
but now every other video that i watch lacks the visuals and just show the steps
how can i proof something is a dot product?
onto or surjective would mean the columns of the matrix span all of the output space R^m
the verb is "to prove", and you prove that it satisfies the definition of an inner product
one to one would imply the matrix is square and full rank
namely, you need to show that your "something" is a function which takes two vectors as input and returns a number as output and satisfies the following:
- linearity in the first argument: <ax + by, z> = a<x,z> + b<y,z>
- symmetry: <x,y> = <y,x>
- positive-definiteness: <x,x> ≥ 0 for all x, & is 0 only when x itself is 0
ye, prove. But i mean, i have here the conditions it must satisfy, but idk how to start

Is there a way to visualize this?
first condition is < af + bg, z > = a < f, z > + b < g, z >
yeah that's linearity
also uh... if you're writing in latex please use \langle and \rangle
@wintry steppe linearity follows directly from the fact that the derivative and integral are both linear
i have no good way of showing this, because a matrix maps (some part of) R^n to R^m
ah because integral (a * something) = a * integral (something)?
that's what i said yes...
can i do the same even if i have a sum on the first part of the dot product?
can someone help me understand the idea behind the inverse matrix? i understand it sort of "undos" a matrix, but i don't know how it ties in with the idea of a determinant and span
i tried watching videos but they just recite formulas and don't show what is happening in linear space
im not sure what you mean
are you under the impression that you're not allowed to use the linearity of the integral when there are other things in the formula even if those things don't affect it?
no. i mean, i know the constant can exit the integral. from on my dot product <x,y>, for the linearity, x become a*f + b*g
do i just need to substitute?
okey. now, for the conjugated one
if a is a constant
what is a conjugated?
or am i missing something?

are you working with complex numbers?
then the complex conjugate of a real number is the same real number
ok so this is extended for C?
mhm
forget it, i understand myself xd
like, it is written with the conjugate cuz it isnt restricted to R
so can i just say this will be satisfied as well? like the left part?
assuming we are working on R
i mean, you could prove your thing is symmetric
or you could go through the same legwork twice for linearity in both arguments
if you wanted
that is because multiplication is (?) like a * b = b * a
commutative
so to prove the left side, i did (a * f + b * g) * z * t^2 bla bla bla
.-.
that isnt the issue
the issue is that you're signing yourself up to do all the same work all over again
🤷♀️
for reference, their username is "i don't know what's going on" 😛
and that is relevant because..........? xd
what ever. The next thing to prove is... idk the name in english. "hermiticity"? i dont know. <x, y> = conjugate <y, x>
and again, if i am not working with complex numbers, it should be the same, right?
that's what ann said earlier about symmetry
yes, but i dont know how to prove it is symetric. The reason it is is because the product is conmutative, isnt it?
it is called symmetry for the reals, conjugate symmetry/hermitian symmetry for the complex
over the reals, yes, it has to do with multiplication being commutative
okey okey
and the last thing is to prove it is positive defined
but idk. First i though about the sign of the functions. t^2 and t^4 are always positive, but f and g could be positive and negative, so the product remains negative
can u give me a hint?
read carefully. positive definiteness is for g = f
this really feels like making a mountain out of a molehill
all these properties are like... obvious for the most part
just saying. maybe things u dont know are obvious for others. Stop saying these trash comment that aport nothing to a help channel
easy there, ann did give you all the tools and definitions all the way up there. i have only been re-reading that to you
just keep working on your stuff at your pace
he/she didnt gave me anything ^^'
if you dont know someone's pronouns you can say "they", just saying
though i am a she
and yeah i gave you the definitions (and even the names!) of the 3 properties you need to prove
i dont care what u are tbh
😒
mkay.......
i mean look
if you look at your formula
then swapping f and g around will not change anything
hows this not obvious
this is the only name u gave me. And if u are so clever, u have may notice eng is not my main language, so i dont study math on english, so i dont know the names
you ignored this then?
actually yes, i missed that comment, sorry
and hows it not obvious that symmetry + linearity in 1st argument automatically implies linearity in 2nd argument too
meh
dont tell me what to do @lavish jewel

looks ok, yea
ok just wanted to make sure
How did you get that basis?
i'm also curious, because (1,0,1), (0,1,0) seems a lot easier to find 😛
found this interesting proof of inverse matrices

That's kinda the normal proof


need some help can anyone do

multiply left and right by one of the values a,b,c, or d @hazy sparrow
I hope this is the correct channel for this
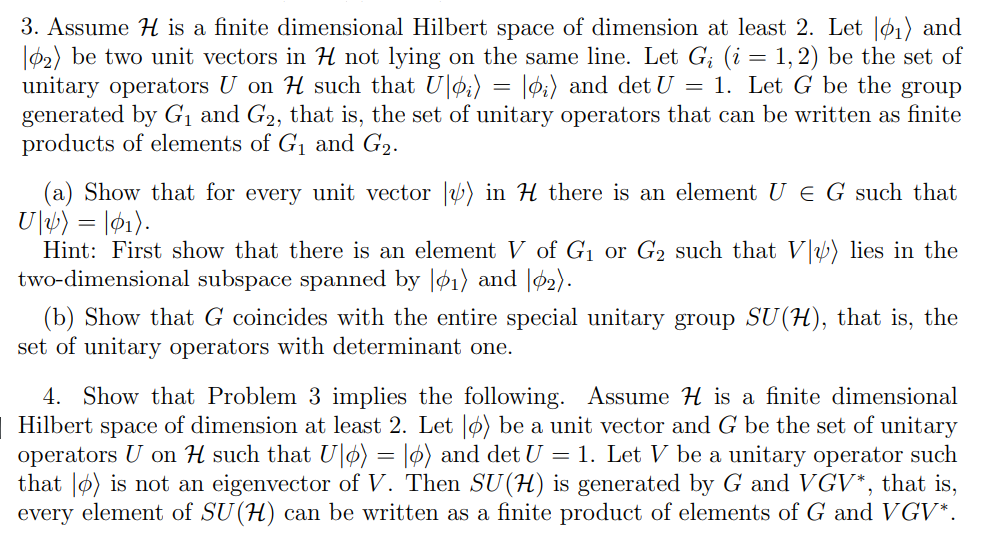
 could I get some help with this one? https://i.imgur.com/wo0wBjy.png
could I get some help with this one? https://i.imgur.com/wo0wBjy.png
in a) I'm thinking of just reducing it to 3D rotations. So since phi1 and phi2 are not on the same line, we can write v1=phi2-<phi1,phi2>*phi1 and use that to form a basis for H by phi1,v1,v2,...,v_n (where all v_i for i>1 are orthogonal)
Then let the unitary operators V_i be rotations of vectors in the 3D subspace spanned by phi1,v_{i-2},v_{i-1} to the 2D subspace spanned by phi1,v_{i-2} st. taking V_1*V_2*...*V_{n-2}=V \in G_1 would rotate the vector to the 2D subspace spanned by phi1, v1. Then have some operator in G_2 which does the last rotation to phi1. I think that should all work, but I'm not sure about 3b) and 4)
wait fuck, I'll try to fix the discord formating
in b) I'm thinking I could use that the 3D rotation group is isomorphic to SU(2), but I'm not sure how
Aren't there usually going to be more than two such G_i?
Well I can just multiply the unitary operators to get new unitary operators, so I should be able to reduce it to two G_i s, I think
Hey i have a question, how would i solve this using geometric description?

anyone know how to do dis?

For question (iv), why would we do what the hint says and take Av dot Aw?
Why not just see if v dot w = 0?

how are you going to calculate v dot w?
Oh my bad..
The problem is that you don't really know much about v or w
the only thing you know is that they're eigenvectors for some eigenvalues
which is why you have to bring A into the picture, because you don't know much about v,w themselves
I'm not too sure how to solve it then
Would it still be in the form Av dot Aw = 0? Or do we have to do something strange with a transpose?
stupid question, can you not find the eigenvectors and eigenvalues explicitly
It tells you to look at Av dot w
Something you might have covered is that Av dot w is equal to v dot A^Tw
but you know that A = A^T
I didn't remember this
no but actually can you not just find the eigenvectors explicitly
I mean yeah you could
The book I am using is Linear Algebra and It's Applications
I just tried looking through the paragraphs I had to cover and I couldn't find Av dot w = v dot A^Tw

I don't really know how that justifies this
It has nothing to do with matrices does it?
Jesus
?
I just realised that I would not be able to answer this kind of question
A bit worrying
I mean, you just follow your nose
They tell you to look at the inner product of Av and w
so you write out the definition
that's (Av)^Tw
Then you apply your transpose rules to expand this out
v^T A^Tw
I didn't even process Av as a vector to be honest, rather as two distinct entities
Uh
That's what matrices do?
They're a function that takes in vectors and outputs vectors
Yeah, I understand
Not questioning it
Just, didn't come up in my mind when looking at this equation
Well, you can only apply the dot product on vectors. So if you didn't realize that, that's a lil worrying. But nbd if you just started working with inner products.
I mean, you can only take the dot product of vectors of the same length, so Av dot w can only make sense if Av is a vector
Sniped
um
<u,u> only makes sense \s
are these are equal $$ -2c_1e^{-x}+c_2e^{5x} = c_1e^{5x}-2c_2e^{-x}$$ , i got a different answer using a different arrangement of $\lambda$ and $\vec{x}$ in my D and P
ahmad_11

would they be equal only if c_1 and c_2 are the same?


WLOG they're equal
mn -xy = 0 therefore parallel
you can just rename c1 as c2 and c2 as c1
WLOG?
ah
ah
Is the range of a matrix A an orthogonal basis, by definition?
I am asking this because I am not sure if we are always allowed to use the "Orthogonal Decomposition Theorem" find the projection of a vectory y onto R(A)
Does it expect me to first find a basis for R(A), check if the basis is an orthogonal basis, and then apply the "Orthogonal Decomposition Theorem"? Or is R(A) by definition an orthogonal basis, allowing me to skip that check?
Sorry but we skipped over the vector space chapter :(
So I'm not sure what that entails. Could you elaborate?

We are following Linear Algebra and its Applications by Lay et al.
And Chapter 4 is about vector spaces
3 is about determinants
As you can see on the schedule, we skipped both of those
what is your definition for a basis?
I only know how to get determinants under certain conditions, like with 2x2 matrices with the method in eigenvalues
I only know a basis from the subspaces paragraph
Where it is a linearly independent set that spans a certain subspace
Could you please help me with the interpretation of that question?
i mean... what they told you is exactly it
it is a vector space
in general, a subspace of a vector space
Do my questions not make sense?
they do, it's just that
i have no idea how else to put it haha
you kinda missed what linear algebra is all about
what doesn't make sense is your course
This is the first year this lecturer is giving the course
And it's really confusing to be honest, he even apologised about it
So I am somewhat desperate for assistance elsewhere
i would recommend you go to the chapter where they explain what a vector space is, or ask the guy to explain it
His lectures are also very difficult to understand, come across as trains of thoughts rather than presentations to other people
There is no real time anymore for that, sadly
because every other definition from that point on will include vector spaces and subspaces in some way or another
the range of a matrix is the subspace spanned by its columns
the set of all the linear combinations of its columns
there isn't much more to say
Right, and the range is also the column space
But I am just wondering
Can I use the "Orthogonal Decomposition Theorem" on a R(A)?
Because the orthogonal decomposition theorem talks about an orthogonal basis
you would need to find an orthogonal basis for the subspace first
I'm not sure if the basis for the range of a matrix is always orthogonal
Okay, I am not sure if any basis of a range of a matrix is always orthogonal
no
Or if I need to specifically look for one
any set with enough linearly independent vectors is a basis of some subspace
you can take the columns and gram-schmidt them
Right, I would have to apply the gramm-schmidt method to be certain that it is an orthogonal basis
So you think that is a necessary check for a question like this one?

it is
Thank you for helping me by the way, it's such a relief...
Would you be willing to look at the questions I have posted in #help-9 ? Because this is a combination with two other questions
i don't have the time rn, i gotta go sleep
Maybe the context will make clear to you what is expected, since I am a bit confused still about the other ones
Oh, okay.
Sleep well, and thank you for the help
whats wrong here?

could u pls explain why 2 is true?
i may have foiled wrong but
no you were right, ty
you get $I_nI_n + I_nA^{-1} + AI_n + AA^{-1} = I_n + A^{-1} + A + I_n = 2I_n + A + A^{-1}$
magnusChadson

So anything multiplied by $I_n$ is just itself?
request new nickname

yes
i see, ty!
np

what's Gamma?
the field over which everything happens?
@lost ermine do you still need help or did you figure it out
Let $A$ be an $n \times n$ matrix. Is there any relation between $det(A)$ and $det(A^{-1}$?
az

like $\det(A) = \frac{1}{\det(A^{-1})}$?
O, thanks
az



then it's transform flips the upper to lower and vice versa?
transpose
transpose
but you don't know that U is triangular
O
I think I have the idea
I know, you confirmed
but I have an idea now
let me formulate it
az

@dusky epoch
verbose but correct
thanks
Could someone tell me what this is based on?
what about it troubles you?
I'm just not sure which rule allows for this
$y^TAx = (A^Ty)^Tx$
if that's a matrix and vectors over R^n and R^m, the argument for why that holds is pretty easy. the transpose of a scalar is the same scalar
Ann

the transpose of a scalar is the same scalar(edited)
Sure, so then we can say
<Ax , y> = <A^T x , y>
The transpose of a scalar is the same scalar?
yes, but A is a matrix
Okay let me give some context
look at what Ann wrote instead, since my argument seems to be confusing for you
In the question they state
A = A^T
ok, but you hand't told us that haha
But every time I give long contexts I tend to not get responses, so I try to narrow it down
Which is my fault, sorry
so your A is a symmetric matrix, meaning it is diagonalizable. is A also full rank?
(invertible)
With full rank you mean that there is a pivot in every column (that the dimension of R(A) = n?)
Then yes
I think so

This is the context
aha
(iii) would be -1
Then we need to carry the fact that A = A^T to (iv)
We start out with Av dot w
I saw this explanation. I get all steps except for the middle one
<Ax, y> = <x, A^T y>

that was crucial because i was planning on directly using that result, but i see now they have asked you to prove it
Sorry for not giving full context, hopefully it didn't throw you off
here is how it goes
we will use exactly what ann wrote up there
gimme one sec to sketch it cuz i'm too lazy to latex right now
Thank you :>
oof office decided to start updating, i guess i'll do it in paint
something like that
oh oops, typo

I can follow most of this, but I just don't know why
<Av, w> = <v, A^Tw>
Is this a transpose property?
Is this a inner product property?
I can't find it
that's kinda straightforward
it's what ann wrote
it's a consequence of (A^T)^T = A
I don't know how what Ann wrote explains it, she starts with a transpose of a vector

Hey I don't know if this is the right channel but I have been stuck on this for a bit I'm not sure how to get to the right answer


This is my working so far
I think there has to be something wrong with my method because d isnt supposed to be a vector obviously
I think I understand how the method works but I was just using the formulas, deriving A and b from q(x) to get p and then d
does anyone have any good resources for self-teaching linear algebra?
If you look for starting id suggest youtube 3brown1blue he explain basics well
IMO you need a book, and 3b1b says so too
His videos are just for intuition
In sum his videos might be maybe 2 hours, maybe even less
No video course will be that successful in cramming a linear algebra course into 2 hours
yeah i watched the entire 3blue1brown series 😄
Yeah, but he explain the intuitition on the topic quite nicely
i feel like he gave a good intuition to help dive deeper into it
Tbh i still dont know what I do in real life with how to calculate null and column space for a matrix
but yeah i felt like i shoved a semesters worth of linear algebra in 2 hours
which book would you recommend?
im confused of the last 2 lines, i thought the proof was over when they proved R = I which is when they said "last row of R cannot be 0". So i don't see the point of the text after that.

so as A~I then A must be invertible
The line above the E= is just them rephrasing/simplifying what they have to prove
not the proof itself
"We wish to show that R=I. That amounts..."

yea but once u showed R = I, then since R = PA then A~I and we are done right
how would you begin to do this problem
I thought something along the lines finding the span of both linear combinations in terms of x,y,z
and these spans are the same equations for x,y,z but im not sure if thats enough and I don't understand why it works which means i cant justify
if (1,4,-2) is on the first line, then you're done
since the direction vectors are the same upto a scalar
ah I see
so they are the same line if 1,4,-2 lies on the first
I understand
yeah I noticed that they had the same direction vector but couldn't figure out how to use that
seems so obvious now
they're the same line if they have the same direction vector and start at points on the same line
I'd try Gilbert Strang's book because he has a lecture series and you can pair it together. I'd also recommend any book which is popular enough to have lots of online discussion you can Google.
thanks 🙂
I know the intuititiioin on this one but i dont know how to prove it

A and B are 2x2 block matrices
and multiplication is defined for all A_jk and B_ki

@novel hamlet you can just do from definition
i need to prove it,
i know how matrix multiplication is defined and i tried it but it became quite fast hell of down notifications

@novel hamlet look
i ended up starting this way
i will try myself a bit later
need to do tea
but you may start from A, B as usual matrices
and then collapse to 2x2
or vice versa
show that this can be transformed to AB from usual matrices
hi drake
how are you doing
or even simpler approach
just look at values of c_ij where C=AB

quick scetch tells me the B needs to be as vide as A is tall
and then same applies to the inner partitions
wich would lead them being square matrices
I guess I am not having a bad day
Yea,Just find the entry in ith row and jth row in AB
there is 2 4x4 block matrixes

Compare it with the i,j th entry you get from that block matrix product
Should be same
ah yes, had typo theere
anyway, do you see intuitively why it is true?
yes i see it, i just dont know how to write it mathematically
it is quite logical its just good old substitution trick
if you want you can just write down all explicitly and do cumbersome computation
but what i would suggest you is just to argue about values of c_ij
im not sure if it is sufficient to define A_iJ and B_ij have multiplication defined therefore i can substitute matrix A_ij with X and B_ij for Y and do standard matrix multiplication

determinant ig
|A| means what again?
wym
determinant
okay
okay so what is the difference between cross products and determinants exactly
or is it that you just use determinants to solve cross products


lets say i have these matrixes and i want to multiplicate them
i am suggesting you here
i decide that A upper left corner can be substituted as X and B upper left corner Y and so on and get then 2 4x4 matrixes with substituted values
um guys i managed to solve the first part of this question but im curious why when S becomes the solution space here, i need to transpose it?

From
Rule 3
Stick to one channel and don't post the same question in multiple channels. Please don't ask for help in other channels if no one is responding in the one you have posted your question in.

your honesty and straightforwardness is a public service
its useful in some proofs
not really computationally
the wikipedia article for cramer's rule provides some example proofs where its handy and simplifying
but it also mentions that its less efficient for computations, confirming what i said:
Cramer's rule implemented in a naïve way is computationally inefficient for systems of more than two or three equations.[7] In the case of n equations in n unknowns, it requires computation of n + 1 determinants, while Gaussian elimination produces the result with the same computational complexity as the computation of a single determinant.[8][9][verification needed] Cramer's rule can also be numerically unstable even for 2×2 systems.[10] However, it has recently been shown that Cramer's rule can be implemented in O(n3) time,[11] which is comparable to more common methods of solving systems of linear equations, such as Gaussian elimination (consistently requiring 2.5 times as many arithmetic operations for all matrix sizes), while exhibiting comparable numeric stability in most cases.
it cites http://web.eecs.utk.edu/~ielhanan/Papers/JDA2011.pdf, which states that cramer's rule is comparable to LU decomposition in terms of numerical stability and asymptotic speed
but still slower in practice
(up to a constant multiple)
As can be seen in Table 4, the algorithm runs approximately 2.5 times slower than the execution time of Matlab, independent of matrix size, which closely corresponds to the theoretical complexity analysis presented above
thank you
cramer's rule is that useful handwaving tool that i use when i want to prove something about invertibility of matrices and smoothness
Sorry for not replying, Gamma is just a field of characteristic 0, you can just think of it as R.
e.g., GL(n, R) is a lie group, proving inversion is smooth uses cramer
thats the problem if u wanna see it again]

mhm
okay
if im reading this right it looks like we must have $P(t) = \alpha_1 t$ with all other coefficients zero
its more fun tbh
Ann

thats what i thought but it seems to trivial dont u think?
but yea it looks like thats the only way
i was wondering if there is some way to represent a trilinear form as the product of vectors and a 3D matrix?
or
generally as a matrix vektor product
well it feels like any other coefficient being nonzero would break linearity
so
yea u r right
What does it mean for Ax=b to have a solution for every b?
Is this another phrasing of 'is there at least one free variable'?
It means what it sounds like
any system which can be expressed as Ax=b will have a solution
But is this related to the idea of "no solution, a unique solution or infinitely many solutions"
Or is it related to mapping/onto?
"have a solution"
it refers to the existance of solution(s)
since it says solution
Sorry, it just threw me off that it says 'for every b'.
Couldn't it be the case that there is a consistency condition which would allow for infinitely many solutions, but not for a specific b?
if there's infinitely many solutions, then there's a solution
So it's just asking if there are free variables?
FTIM says that Ax=b has a unique solution for all b, if A is invertible if that's what you're referring to
I'm not sure what FTIM is, sorry
fundamental theorem of invertible matrices
Wait, so that would mean that there should be no free variables, right?
If a matrix is invertible, it has n pivot positions
this also works for nonsquare matrices
no need to look at invertible ones
only invertible from one side
injective matrix moment
you're an injective matrix 
😛
anyway, you should rather talk about the rank, number of rows, and number of columns
I was watching videos on this

And it just confuses me because here he says there are infinitely many solutions if there are not n pivot positions
And that n pivot positions would mean that there is only a unique solution
But maybe he means for a specific b?
That if there are n pivot positions, there is a unique solution for every b?
imagine a system of n equation in n variables
the case you mentioned with n pivot positions is a full rank (invertible) matrix
there is exactly one solution for each b
Okay thank you, and when there is a free variable, does that mean that there are infinitely many solutions for each b?
i agree, there are very few solutions to my problems 
what may help you to better visualize/digest this is to write your system in three forms:
1- As a matrix equation
2- As a combination of a vector equation
3- As an augmented matrix

you can also write it as a system of equations
which is pretty much the same
Would you be able to tell me what you would do when faced with a question like
"Does the vector equation Ax=b have a solution for every b?"
It would help out just knowing how someone would go about doing so
Sorry for asking so much

there are other equivalent statements
but that's as far as I got
look at this and tell me what you don't understand
i mean matrices are just linear transformations right
i just visualise various violations committed upon the cartesian plane
now considering that there are some matrices which absolutely crush the skeleton down to like a single line, or even the zero matrix which causes an implosion to the origin
I have no clue what a cartesian plane is
also, the theorem I posted answers the question: "Does the vector equation Ax=b have a unique solution for every b?" Which is a bit different with your original question.
maybe you call it smth else in your lang, Bes
Yeah, I'm not sure if it's semantics or if there is an actual difference
That is what I am worried about
'a solution', do they mean singular, or can there be multiple? stuff like that
then when they say every b, they mean unique?
I wrote the entire Lay's Invertible Matrix Theorem a couple of times, it just doesn't stick sadly..
not necessarily
same book moment
that's what I'm saying
no but that's not what they're saying
in the proposition it doesn't have to be one and only one solution, as i understand it, just >= 1
and then it turns out that it's only 1 anyway, i think
when they say: "a solution for every b", it can only be true when every b has solution, in which case solutions will be unique.
anyway, the theorem I'm working with is about an n * n matrix
Give a scalar equation for a plane at distance 9 from the plane P with equation −2x−2y−z = 4.
@wintry steppe is what you dealing with n * n matrices?
Yeah this is a square matrix
OK, then the theorem I posted applies

anyone
Just check if there are n pivots, no?
yes, n pivots, or if the det is not zero, which means it is invertible, or there isn't any zero row/cols in reduced row ech form, or all the vectors/columns are linearly independent.
any of these, means every of these
we clear about this?
Yes, thank you
OK, now when the matrix is not square
the rows represent equations/possible constraints
the columns are the number of variables
you need to row reduce this to echelon form, the augmented matrix
first answer the consistency question:
is there any row of the form [0, 0,... x], where x is none-zero
In the augmented matrix, right?
this would equal an equation of the form 0x_1 + 0x_2... = x, where x is not zero
which can never be true
if you find such a row, there is no solution at all
system is inconsistent
right?
Right
now, if it's consistent, we need to answer the uniqueness question
are there more unknowns than equations?
anyoneee
then there are infinite many solutions
if not, the solution is unique
which, coincidentally happens when we dealing with an invertible square matrix
With unknowns and equations you mean columns and rows, right?
yes
but, say rows with pivots for constraints
a full zero row, doesn't count as an equation/constraint
makes sense?
it's always true
Yeah it does
I'll keep that in mind
Thank you for taking the time to help out az, you're a blessing
OK, now a point that may help
you have a non square matrix and are asked if it has a solution for every b
if you end up with a zero row
the system will not have solution where the b has a non zero entry in the corresponding row
bc that will be a [0 0 0 0 x] where x is not zero
that means, it has infinitely many solutions for some bs
but there are specific bs where it has no solution
if you get that too, you have the essence of this subject AFAIK it
y'all left me on read
That makes sense, thank you
What are some engineering applications of linear algebra?
computer graphics, machine learning, physics simulations
I'm in class right now so I can't take a good look, could you explain or provide some examples please?
just ignore your class
computer graphics: projection from 3d objects into 2d space (your screen)
machine learning: you can represent your inputs and weights calculations as dot product multiplications
physics simulations: vector fields come up a lot and can be used to determine where a particle can end up
just google applications of linear algebra lel 
oKK got omegasullied my bad 😔
I will Google after ty
Thanks for the examples Charles!
m x n
rows x columns
The columns need to span the dimensions of rows
So n >= m for it to be onto
Is this correct reasoning?



{kind=link}
{kind=link}
{kind=link}
not sure about c) here

is norm only defined for vectors?
so i cant have norm(scalar) ?
well
the norm of a scalar absolutely makes sense
as in, it's just its absolute value
right
but you should check back to your book's definition of norm
because
who knows
maybe it only defines norm for vectors?
yea the back of the book says the expression doesnt make sense
"In mathematics, a norm is a function from a real or complex vector space"
$\mathbb{R}=\mathbb{R}^n\big|_{n=1}$
ahmad_11

righttttt
then the usual norm is just absolute value!
cool!
true
Let $P_3(\mathbb{C})$ denote the complex vector space of polynomial of degree 2 or less. Let $\alpha,\beta \in \mathbb{C}, \alpha\neq \beta$. Consider the mapping $L: P_3(\mathbb{C}) \rightarrow \mathbb{C}^2$ given by $$L(p)=\begin{pmatrix} p(\alpha) \ p(\beta) \end{pmatrix}, \ \text{for} \ p \in P_3(\mathbb{C})$$ \
Consider the basis $V=(1,X,X^2)$ for $P_3(\mathbb{C})$ and the standardbasis $E=(e_1,e_2)$ for $\mathbb{C}^2$. Consider the matrix presentation $_E[L]_V$ for $L$ with respect to $V$ and $E$
ScapeProf

How do I do this? Im just confused because V is dim 3 and E have dim 2, so how does that work when finding the matrix presentation?
shouldn't change anything
isolate where each of the basis vectors from P_3(C) get mapped to
so what are your basis vectors of P_3(C) I'll help you out @ebon veldt
(1,00),(0,1,0),(0,0,1) right?
I was gonna say 1, X and X^2
oh ye
so where does the polynomial p(x)=1 get mapped to
to (1,00)?
where's this come from
that's not the mapping, go back up there what do they say L(p) = ?
it should be a 2 dimensional vector
p(\alpha),p(\beta)?
yeah good
so now specifically our basis vector, p(x)=1
what does this get mapped to
oh 1(\alpha),1(\beta)?
yeah
nope
p(x)=1
p(alpha)=1
you're just plugging into a polynomial here nothing spooky 😛
ah that makes sense
this determines the first column of our matrix
$[L] = \begin{pmatrix} 1 & ? & ? \ 1 & ? & ? \end{pmatrix}$
Merosity

see how if you were to multiply by a column vector on the right, let's say [3,0,0]^T
that'd correspond to taking the polynomial p(x)=3
and getting out the column vector [p(alpha), p(beta)]^T = [3,3]^T
so let's do the next basis vector now
p(x)=x
what's L(p)?
p(\alpha)=X, p(\beta)=X
😬
p(x)=x
plug in x=alpha
let's try something easier
p(x)=x
plug in x=7
what is p(7)
So thats [7,7]?
p(\alpha)=7?
p(7)=7
stop
we're just talking about a polynomial here
like you learned in middle school
p(x)=x
means whatever you plug in for x is what you get out
so if I plug in x=3, then p(3)=3
what L(p) does is it takes the polynomial and plugs in alpha and beta to p
@ebon veldt you with me so far?
we're working towards what L(p) is when p(x)=x
Think so just confused cos doesn't a polynomial have 3 unkowns, \alpha+\beta X+\gamma X^2?
we're just transforming the basis vectors
the columns of a matrix are exactly where the basis vectors are sent to
Alright
so doing that is all we need yup
so recap, we took p(x)=1 our first basis vector and found L(p)=[1,1]^T
so L(p) when p(x)=x is [p(x),p(x)]^T?
now we need to take p(x)=x and see what L(p)=? here
not quite
it's [p(alpha), p(beta)]^T
what's p(alpha)=?
ah so just [x,x]^T
wrong
answer this question
p(alpha)=x
This is contradictory isn't it?

this channel is occupied right now @wintry steppe
this is not how you plug into a polynomial!!! @ebon veldt
Take your time, just curious
oh okay so [alpha,beta]^T and for x^2 its [alpha^2,beta^2]^T
you sure?
uh
well p(11)=11
ah just so for when I help future students, could you explain why you thought to write this
and what made you realize what p(alpha) should be
hmm not sure tbh but it makes sense that p(alpha)=alpha I guess
But thanks @quartz compass
lol you're welcome
anyone mind explaining how to go from -2/(1-i) to -1-i?
i cant wrap my head around it
multiply by the conjugate divided by itself, (1+i)/(1+i)
ohhh
Hey im trying to recreate affine transforms in desmos: https://www.desmos.com/calculator/u8kgcldzqd. But i have problem that draggable points doesnt end on up on circle.

Desmos
how's it supposed to behave?
Theese points should lie in circle as they define my transformation
wait... so what are the requirements for your circle?
it needs to pass through your two points?
or what
So point [1,0] is transformed to [a, c] by affine transformation so is [0,1]->[b, d]
what's your affine transformation, how does it have anything to do with a circle?
Ok i know the problem, I have wrongly transformed the circle.
Its not affine actually, it's just 2x2 matrix mutltiplication
of 2d points/
can we take the difference between these 2 eigenvectors which is (1,-1,1) and say it is associated to the eigenvalue 6?

try to show you can take any linear combination of eigenvectors with the same eigenvalue and get a new eigenvector with the same eigenvalue
if Av = 6v and Aw = 6w then is it true that A(v-w) = 6(v-w)?
yes
yes