#linear-algebra
2 messages · Page 183 of 1



This system doesn't have a unique solution.
b, c, and d are defined in terms of their relations with a and a is a free variable in R.
I have a hard time imagining why a circle with 3 points can have infinite many solutions.
It maybe just smth very simple that I'm stuck on.
Appreciate any explanation.
@wary lily if (a,b,c,d) is a solution to your system then so is (ka,kb,kc,kd) for any nonzero constant k
this corresponds to the fact that the equation would be unchanged if you were to multiply both sides by k
damn
you can just set a=1 and not worry about things
I could even rewrite the equation
yes
I could even divide through by a
set b/a = A, c/a = C...
which is equivalent to setting a=1 like you said
OK, thanks

i guess it's all the flavors of 1,2, and 3 dimensional subspaces you could get (in the case of part a)
I haven't learned subspaces yet
we've learned RREF, Gaussian method of elimination etc.
very beginner material
could it be they asking what forms the RREF can take on?
like one leading 1
that's pretty much it

I am very very lost for problem #2
So I want to show for some constants a, b, c
that if af(p(x)) + bg(p(x)) + ch(p(x)) = 0
then a = b = c = 0
but I'm not sure how to go about this
I have that p is some arbitrary polynomial
p(x) = c_1 x^2 + c_2 x + c_3
but idk where to go from here
Could I send my work here and then have someone look over it?
I know that's alot to ask but if you'd be willing to look at my work for #2 ping me
I'm very lost
I think I got a way to prove linear independance but I feel like I made a mistake maybe
the slope of this line is 1/2 which means that it's direction vector is 2i+j
a normal line to it has the slope -2, which means its direction vector is i-2j
So I've got this question:
Determine all the values of a, b, and c so that the augmented matrix corresponds to a consistent system:
,w {{3,9,-21,a},{0,-24,-96,b},{-6,-6,46,c}}

I've row reduced it to the identity matrix with some expressions in all 3 of those variables in the 4th column, but I'm not sure where to go from there. How do I get values for a, b, and c? I feel like there will be infinitely many solutions, but how can I express them?
,w row reduce {{3,9,-21,a},{0,-24,-96,b},{-6,-6,46,c}}

there will be a unique solution no matter what a, b and c are.
Really? I thought there would be some combinations of a, b, and c that wouldn't represent a solution
Although I guess not, because whatever you plug in gets you some vector
for an augmented matrix to be inconsistent, its row reduced version must have a zero at one of the supposed pivot positions, while the corresponding entry in the augmented column is none zero. This is equivalent to the equation 0 = c where c is none zero. Since all the pivot positions of your matrix are none zero, the system is consistent regardless of the entries of the augmented column.
Right. Ok thanks to you both!
you could use Geogebra
^that's true
but it may help them to visualize and better understand the formula


this is false, right?
one of the other rows could cause inconsistency
make an example
OK
[1,0,0,1]
[0,0,0,2]
[0,0,0,0]
@wintry steppe have you read what I posted further above?
@quartz compass does that work?
idk does it?
yeah but what if I don't know
can you convert the matrix back into a system of equations for me
yeah, sure
the second row would equal an equation of the form $0x_1 + 0x_2 + 0x_3 = 2$ which is equivalent to $0 = 3$.
az

this is more suited for like #elementary-number-theory
but one method is just to check all the possible values
you can just plug in x = 0,1,2,..., 18 and see which of them work
Well, in this case its a little easier
because 19 is prime, it turns out that the usual quadratic formula works
where the division and square root need to be like appropriate modular versions
Not sure where you got 0=3, but you are right about your thought process. The claim is generally false.


what do you think?
to be honest its really confusing to me
do you know how to check whether something is a subspace?
well, what axioms are you having difficulty verifying?
i dont think ists the axiom part
its the part of understanding what to use
to verify
from the question
i'm not sure i follow
V consists of all real functions defined on [0, 4] that are continuous
so if a function:
- has domain [0, 4]
- outputs real numbers
- is continuous
then it's in V
what does it mean for it to be continuous again
this is a concept from calculus
intuitively, it means "can be graphed in a single line without lifting one's pencil"
ok yes i remember now
more formally, it says that it agrees with its limits at all points
Rock on! These can definitely be tough to keep track of. So good job on solving it!
you have to be more specific on what part you don't understand
do you not understand how to check something is a vector space?
do you not know what a continuous function is?
or do you not know what the statement means by "the set V of all real-valued continuous functions on the closed interval [0, 4]"
thanks, will do
Not sure why you said will do. But okay 😋
are two vectors colinear if their inner product equals to 1 or -1
also what does it imply if the scalar triple product of 3 vectors (in R3) is 0
slimvesus

@wintry steppe does the cross product respresent the area of a parallelogram?
i remember learning about it but probably forgot
yeah i do know that

I have this 1 problems
do I have to test out each and every point?
basically the idea is to connect the points with vectors and use scalar triple product to see coplanarity
@wintry steppe
i connected (3, 3, 11) and (-1, 1, -6) to form a vector <-4, -2, -17> and assumed that the other two points are position vectors
the scalar triple product was not 0
can i just write that they are not coplanar or do I have to test this for every possible case
Correct me if I am wrong, but wouldn't this be coplanar if we show that the two remaining vectors are linearly dependent of the other two @bitter shuttle ?
What’s so special about determinant of 1? It shows up everywhere in applications. I know the thing with the volume of the parallelepiped but is there anything else special
I just want to confirm whether this would be true or not
A is a nxn symmetric matrix => A has n linearly independent eigenvecctors right?
the most immediately relevant fact is that det 1 implies multiplying another matrix by this matrix doesnt change the other matrix's determinant
hence the matrix "doesnt affect" determinant properties
Yeah I was starting to think maybe it has some relationship with conserved quantities
there's also just a sense where det 1 is like, the "simplest" form of a matrix

for this question, the systems are equivalent when they have the same solutions
but im not sure what the process is to work this out
do i find the reduced row echelon form of each system?
Let's say that A = [1 2 3; 4 5 6], and that B is its right-inverse. Then AB is identity, but what is BA?
Oh no, but A is a surjective matrix, so only right-inverse truly exists. I am wondering what BA does though.
I am not sure I understand your claim
Ohhh, non square. My bad
So when you say identity do you mean:
$\begin{pmatrix} 1&0&0\0&1&0\end{pmatrix}$?
dackid

Here, lemme get the results from Julia
Let's say BA=C then left multiplying with A gives us that A=AC
Okay. This is a new concept for me. It doesn't seem too bad, but I've never thought about this before.
But, what is the identity?
Ah okay
Hmm, does that tell us anything about BA though? 🤔
This is probably an awful observation
What do you mean?
i don't think you can do that, you can't multiply B with A from both sides
dims don't match
A is 2x3 ,B is 3x2
Does A=AC uniquely define a matrix C?
Ohhhh, C=I, well, wait...
anyway yea, a transpose was missing
C is non square
Yea, that part confuses me
Yea,C is not unique
As in there are infinitely many C's?
Yes
You will have 9 variables and 6 eqns
Meaning you have 3 free variables for C
Nvm,C is 3x3
what are the dimensions of everything going on here?
0.833333 0.333333 -0.166667
0.333333 0.333333 0.333333
-0.166667 0.333333 0.833333
This is C
doesn't sound right unless A is B^T
Ummmmm
By right-inverse I mean A' (A * A')^-1
I'm pretty sure it's correct because otherwise Julia would crap out on you
sure, you can do xAB = x
Try with a different matrix
that matrix you just wrote is a projection onto the column space
that's the only interpretation you could give it. orthogonal projection onto column space of A
yeah
well, it's no longer orthonormal because A is rank defficient
also
isn't B 3x3?
maybe i meant projection onto row space, i'm still sleepy
hmm
here's an intuition I haev for why that won't be
If A is a surjective matrix
then AA' or A'A will be square
One of these will be invertible becasue we're only surjective
the first, yeah
inv(A A') will also be square
then multiplying it one last time with A' from the left
Will make it non-square
Thus the pseudo-inverse will always be non-square
oof man i so asleep, my bad. i meant after multiplying it with A
A A' (A A')^-1
that one's an ortho projection
unique and square, and since it's surjective, also an identity
I see hmm
that B matrix is the right pseudo inverse of A, as you said
you can expand it in an SVD to see what it's actually doing
aha
an SVD shows that BA is an ortho projection onto the row space
double check i didn't make dumb mistakes, i'm gonna go drink coffee

Ayy, good job on finding the missing piece of the puzzle
I see, so this is just SVD in disguise
everything is SVD in disguise
fundamental theorem of linalg ftw
for clarity, that's an economy-size SVD. sigma is diagonal, U is unitary, and the columns of V are orthonormal, so that U^H U = I and V^H V = I of their corresponding sizes
V V^H is not an identity because V only has 2 orthonormal columns
and to be fair, with how the problem is written, i'm pretty sure U = I already

wym show
you could probably write A in terms of row vectors and B in terms of column vectors
and then the first row of AB is dot products between the first row of A and all the columns of B
like
A = [ r_1
r_2
r_3
]
r_1 * B = ...
right
alternatively, you can put an identity matrix between A and B and then it sorta takes on the form of a decomposition, where it becomes clear that AB can be expressed as a sum of rank 1 matrices
and you add up the corresponding rows of those matrices to get the rows you want
it's pretty much the same idea, but writing A as columns and B as rows
I think I just read something similar but haven't practiced it yet
that's sort of a linear combination
it was written that this method is mostly used for proofs and not computations
thank you

i mean, it becomes straightforward if you look at that
instead of taking the whole vectors c_i, just take the corresponding element in them
if you pick the first element of each c_i, you end up with a sum of rows, and boom, you're done
this is arguably faster than computing dot products
(though not really, the 2 methods are equivalent)
just do whatever is easier to keep track of for you

why isn't the starting matrix(cirlced red) in row echelon form?
it seems to be fulfilling these two conditions of row echelon form imo (copied from wikipedia):
>the leading coefficient (also called the pivot) of a nonzero row is always strictly to the right of the leading coefficient of the row above it.
Some texts add the condition that the leading coefficient must be 1.[1]```(please ping me if you answer)
It might be REF, but the title that's cut off says RREF
🥴
and the starting matrix isnt in RREF
right yes the this is calculating reduced row echelon form
so is it in ref? The starting one?
the circled matrix is in REF but not RREF.
ahh ok ty ty
[Solved]
Huzzah, I'm regressing as a mathematician, asking for linear algebra help again >.>
Question:
I'm trying to show for any real 4x4 matrix A, there exists a 2D subspace U of R^4, such that A(U) ≤ U
What I've tried so far:
The way I've gone about this so far is finding two linearly independent vectors v and w such that A__v__ & A__w__ are in span{v, w}
For the case where I have a complex eigenvalue, it's not too difficult to find a 2D subspace U where A(U) = U (since it's basically a rotation, or at least it has that intuition)
For the case where I have at least 2 distinct real eigenvalues, I could take the eigenvectors corresponding to those eigenvalues and we're done (those eigenvectors won't be scalar multiples)
I'm stuck for the case where I have 1 eigenvalue with algebraic multiplicity 4.
I've tried looking at the Jordan form, and I can eliminate the cases where the geometric multiplicities are 2 or more, but it leaves me with this Jordan matrix :
SashaMomo

So essentially, I'm trying to find a 2D subspace U', where the image under this Jordan matrix is J(U') ≤ U
<@&286206848099549185>
There was a general solution for a system like above
and I was asked to express it as a linear combination of column vectors
which ended up like the following:

I understand the technique but I don't understand the use of it
that's right
what's the benefit of this type of expression of the solution?
@wary lily it may give visual intuition. since the 3 vectors being scaled by r,s,t are linearly independent, taking every possible linear combo creates a 3d space embedded in 6d space (shifted from the origin by a constant vector)
a bit more useful in smaller, eg 2d/3d, spaces
yes
a quick substitution seems to corroborate that
this works
If I have two points A and B in 3D space. I need to find third point C that ACB make 90° angle
How can I find this Point?
the cross product gives the normal to the plane of u v
Okay and how to explain that?
well AC and AB are a right angle
so CA and CB are vectors at a right angle
and perpendicular vectors have 0 dot product, right
Ohhh Smart
yeah, good move
there's probably some hilarious identity that cuts through all of this so fast
Thanks
if it's perpendicular to the thing then it's parallel to the y axis
so the direction is just gonna look like j
anything works
any non-zero number works
they've normalized it, this looks better and is more convenient
that's all, IG
yes
t(0, c, 0) | c not equal to 0
c in R
it's bc t is in R
so you can get any number for y by multiplying
Hey can someone help me with the matrix representation of linear transformation 😅😅 I have the solution but I’m really struggling understanding it
what was the question exactly?
no, the solution is parallel to the y axis
bc it's normal to the xz-plane
it would be *parallel to the z-axis
if it were perpendicular to the xy-plane, it would be parallel to the z-axis
btw for this problem, a really easy way is to notice precisely this we're talking about now. if the vector is on the xz plane, the line must be represented by some point plus a scaled version of the direction vector (0,1,0)
so you need a point P such that (3,2,-1) - P = c(0,1,0)
you can try solving equations and stuff to find it exactly, but this one is simple enough to just go "oh, look" and write down P(3,0,-1) + t(0,1,0)
well, you weren't asked to "prove" anything
you would also use the cross product, not the dot product
you can use the basis vectors of the plane xz and take their cross product to produce a direction vector perpendicular to the plane
show what is perpendicular
perpendicular to what?
the xz plane?
to each other what
that is 1 line
because the cross product yields a vector perpendicular to the 2 vectors you started with
so you can pick any 2 vectors that form a basis for the xz plane, and their cross product will be perpendicular to that plane
mhm
the set of points t(1,0,1) where t is in R, so you could say that
no, that's wrong
that's just one line on the xz plane
you're thinking waaaaay too hard
xz is spanned by (1,0,0) and (0,0,1)
yeah, set of points (t, 0, s) where t,s are in R

y is zero then
whats the tick denote
transpose?
using the definition of matrix multiplication, find an explicit expression for the entry (i, j) of (ST)'
and of T'S'
oh
yeah sorry, my discord was slow
is your definition T'(f) = f \circ T for all f?
okay then ((ST)'l, x) = (l, (ST)x) = (l, S(Tx)) = (S'l, Tx)
can you justify each step? and can you finish the argument from there?
and youre right that this implies the third condition with a bit of extra work
Can someone direct me on how to start this?
I have points: A(1,0,0), B(0,2,0), C(0,0,3). Find all points P so that angles: ** APB, BPC, CPA are 90 degrees**. I know that one of the P can be (0,0,0), but the rest...
I know that cross product of these vectors must be equal to 0, but after I try to solve that I get some weird stuff

It's just doesn't make sense for me. I can only find point (0,0,0), but the exercise says that there is another
imagine these as the vertices of a rectangular prism
draw a picture it might be more obvious
actually what I said doesn't quite work but there's still a point kind of nearby that, so the picture will still be helpful I think
the solution I have in mind is imagine a plane through the 3 points, then reflect the point (0,0,0) through this plane to the other side and it'll have all the same angles

whatever works
like the person who asked the question used cross products, personally I find those to be laborious
if you want to specify when something is perpendicular, you can look at when the dot product is 0
the way I did it was do a single cross product to get a normal vector to the plane, then multiply it by an arbitrary scalar k. I then created two of the vectors that should have a 90 degree angle using it and took their dot product and set it to 0 then solved for k
Thanks, I never would never though about that.
Soo
I need to find equation of this plane that goes through points A,B,C?
Then write equation for line that goes from (0,0,0) to the plane. After that find point that intersects with plane and solve the scalar k
I never find the equation of a plane for my solution
I just find a normal vector to that plane by taking a cross product of two vectors that are in the plane
because this is normal to the plane and goes through the origin, I don't have to worry about the plane at all
I go directly to saying k*that normal vector is the point P and start constructing two vectors from it that are at a 90 degree angle
Sorry I don't get that part ...and start constructing two vectors from it that are at a 90 degree angle
I worte equation for P as [x,y,z] = t[6,3,2] , that is normal vector
APB, BPC, CPA are 90 degrees.
so you can make AP and BP which have an angle of 90 degrees
okay give me a sec to write that down

Purple is that point on normal

and the point P is normal vector [6,3,2] * 2 * t, right??
or is there a way to make this simpler?
you didn't listen to me
you don't need to worry about the plane at all

P is t<6,3,2>
now the angle between BP and CP is 90 degrees
what is the vector BP and what is the vector CP? @quasi frigate
I'll help, BP is <0,2,0> - t<6,3,2>
find CP and now take their dot product and set it equal to 0
then you just solve for t
looks interesting
question is for (b), I'm a little confused about how La is defined, I think I can do the rest if I understand that part

so the kernel of L_A are just the 4-tuples which get sent to the zero 3-tuple
(solve the homogeneous eqn)
Ax=0
I don't think I'm very comfortable with using tuple as a term here
is there another way to say it?
ah i just mean like
(1,1) is a 2-tuple since it has 2 components
normally we say like
ordered pair
cartesian vectors w/ n entries = n-tuple
and then for the (1,1,1) it's a triplet
but for 4 idk the word lol
quadruplet?
kek
i guess the other way is to say that x is an element of R^4
the important part is that it brings down elements in R^4 to R^3?
Yeah Ive never heard tuples used for cartesian vectors either
It's in Axler
oh lol
He calls everything lists
so really its just.. solving kernel image rank... the same way you always would
I do appreciate that it was defined pedantically I guess
yeah i mean it's important to call it a different thing
A is a matrix but L_A is the actual transformation between the R^4 and R^3
A just encodes what L_A wants to do or something like that
😌
proud of you
camp the channel to learn more
ill start asking insanely hard LA questions 
show that the characteristic polynomial of a linear operator T is reducible if and only if the vector space has a nontrivial proper T-invariant subspace
help any1???
(you know how to do one direction, metal)
baire category theorem

shameful

it's trivial
unless you're a constructivist
cool kid 😎
what if m = 0???
thm: an open map is a complement of a closed map
figuring out what complements of functions mean is left to the reader
if $V=U\oplus W$ then $U\cong V/W$ but $W\cong{0_U}\oplus W\subset U\oplus W$
Uchigawa

expanding on this, is it really just notational convenience or it's correct and i am missing something?
wrt the two original vectors, yes?
it's the magnitude of the cross product
not just the cross product
literally the area of a parallelogram lol
|v x w| = |v| |w| sin theta
well what's the relationship between the sides of a parallelogram and its diagonals?
<@&286206848099549185>
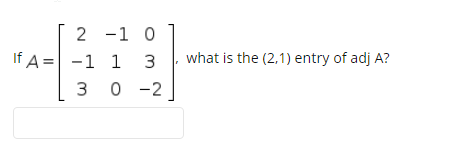
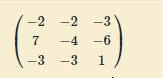
I guess 2 is the row and 1 is the column, so take the transpose of the matrix and find that entry right
Do I just remove the column #2 and row #1?
and then the determinant of the resulting matrix?
what do you define adj A as?
What do you mean?
what does adj A mean
Hmm
I saw this on stackexchange

Mathematics Stack Exchange
I'm doing a practice exam and I came up with a different answer than the key, I'm not sure where I went wrong.
the question: Find the (2,4) entry of the matrix Adj(A),
if A = $$\begin{matrix}1 &...
ok sorry my bad, I didn't know adj meant this

Can someone please help me parse this? Not the entirety of it, it's the "Set of all linear dependencies of length at most r+1 on points in C" that's tripping me up

What exactly does that mean?
This is what C is, for reference.
is it 3/5?
Thanks a lot for your perseverance 🙂 I calculated P = (72/49, 36/49, 24/49) (apart from point (0,0,0)) and after I graphed it, it looks like it's correct
Hey I need help. I have points in 3D space: A, B, C, D
I need to calculate distance between line AB and CD in three possible different ways
hey I'm trying to understand why distinct eigenvalues implies distinct/linearly independent eigenvectors, here's my reasoning
intuitively, if an eigenvector say $x_3 = c_1x_1 + c_2 x_2$ then $\lambda_3$ must scale both factors (distribute it). but if $\lambda_1 \ne \lambda_2$ then $Ax_3 = \lambda_3(c_1 x_1 + c_2 x_2) = c_1 \lambda_1 x_1 + c_2 \lambda_2 x_2$. since $\lambda_1 \ne \lambda_2 \ne \lambda_3$ this vector $x_3$ cannot be an eigenvector.
to generalize let ${x_1, \dots, x_r}$ be LI eigenvectors, now to show $x_{r+1}$ cannot be dependent
$x_{r+1} = \sum_{i=1}^r c_i x_i \implies \lambda_{r+1}x_{r+1} = \lambda_{r+1} \sum_{i=1}^r c_i x_i = \sum_{i=1}^r c_i \lambda_i x_i$
since we can't factor all $\lambda_i$ out, since they are distinct $x_{r+1}$ cannot be an eigenvector / cannot be dependent.
does this line of reasoning hold up? the factoring out part is intuitive for me but I've probably missed something, usually when I come up with "elegant" proofs they're wrong 
uli

tldr: not to be pedantic but how can i make this more rigorous?  (assuming the line of reasoning holds up)
(assuming the line of reasoning holds up)
@gritty swift it's a bit of a jump from 'Ax_3=...' to 'x_3 is not an eigenvector'
https://i.gyazo.com/bf7032732c5c959f9d568d9a31b21de5.png but this can be useful in 'directly' proving the x_i's are lin indep

it's easier to show it for 2 eigenvectors, then i'll leave you to extend it to any number of eigenvectors by induction
let $x_1,x_2$ be eigenvectors of $A$ with resp. eigenvalues $\lambda_1\ne\lambda_2$. let $c_1x_1+c_2x_2=0~(1)$. rearranging this gives $c_2x_2=-c_1x_1~(2)$. applying $A$ to (1) and using (2) gives
$$c_1\lambda_1x_1+c_2\lambda_2x_2=c_1(\lambda_1-\lambda_2)x_1=0$$
since $\lambda_1\ne\lambda_2$ and $x_1\ne0$ ($x_1$ is an eigenvector), this means $c_1=0$, and using (2) along with the fact $x_2\ne0$, this in turn means $c_2=0$. thus $\brc{x_1,x_2}$ is lin indep
RokabeJintarou

I asked this question yesterday and got help, but there's one thing that I'm not seeing:
If A and B are similar, then their eigenvalues have the same geometric multiplicities
The person that helped me yesterday helped get to the fact that if v was an eigenvector of A with value t, then P^-1v is an eigenvector of B with value t, but I'm still unsure how to show they have the same geometric multiplicity
what's your def of similar matrices
B = P A P^-1 like usual?
if you let BP = PA, with Av = tv, then PAv = tPv = BPv, so Pv is an eigenvalue of B similarly to what you wrote. since P is invertible, Pv_i are unique
so the relationship above holds for every Av_i = t_i v_i

the set of all 3x3 matrices
oh so its literally just all the 3x3 matrices with a trace of 0 ?
thanks i wasnt familiar with that notation at the end
but now i realize how dumb i am
W is defined as a subset of M_33, where each matrix in W has 0 trace
what is S there, tho
presumably they mean W, not S
yes
fair enough
Hey guys imma need a lot of help today... I've finally admitted to myself that I don't know whats going on anymore and I suck at linear algebra. I do have a specific question about Vector spaces Vs subspaces VS Span though. Like in general..... I don't get the difference between a vector space and its span
It's even more confusing that in some cases V = S
Span of a set is the smallest vector space which contains the set
?
Well the span of the standardbasis of a vector space is the vector space itself isn’t it?
Right...
sorry im very new
trying to process
That makes sense...
Lemme check my current knowledge feel free to roast me
So
a vector space is essentially a .. infinite or non-infinite set of vectors that .... define uh.... operations on some space? Such as all possible vectors in R^2
Or is it that + and * closure are what defines that space
not that + and * are in R^2 but that they have to be closed under that to be considered a space
Yeah, for subspaces it is enough to show closure under + and * operation. A vector space requires more conditions to be fulfilled though
Oh yeah the 8 properties
my bad
Okay so .... then what is span lol
Vector spaces and sub spaces make sense to me
about 22.86cm
A span of a set of vectors is the set of all possible linear combinations of those vectors
that's not really a difference
I think of span as a function that generates a set
spaces and subspaces are closed under addition, so they contain all the linear combinations
Subspace is just that set if it also fullfills those two properties you mentioned
Oh... so span is like.. sortof another subset then?
the span is the smallest subspace that contains all the linear combinations of a set of vectors
ohhh
i see
So would it be wrong to say that S is a subspace of possibly both V and W in which they are just all linear combinations
But W could possibly contain no linear combinations , in which S would only be a subspace of V then?
right, but Im confused on how to use that to show they have the same geometric multiplicity
if some t_i has a set of distinct eigenvectors, those eigenvectors are still distinct when multiplied by P, and the eigenvalue is still t_i
Thank you so much to everyone helping it really is making it more clear
OH
W has to contain linear combs, otherwise it is just 0
so the dimension of each set is equal
or is not closed under addition and is not a subspace
Why's that? Couldn't it contain polynomials only?
Uhhh hold on lemme check my understanding
So from what I understand "linear combo's" are just of the form Ax=b and a polynomial is a form of ax^2 + bx + c
@nocturne jewel yeah, since P is invertible/bijective
and why exactly are we talking about polynomials
If we are talking about finitely generated polynomial vector spaces
ohhhh
do you mean to use polynomials of finite order as an example of a vector space?
or where did that come from
I think so
right so if t is an eigenvalue, then the t-eigenspace has a basis {v1,v2,...,vn}
then we know that P^-1 v_i is an eigenvector of B for that t-eigenspace, which means each eigenbasis has the same dimension (rough summary)
what do you mean, you think so
I dunno man im just studying this is all very confusing
you're mixing a lot of stuff up
ax^2 +bx + c is a vector in $\mathbb{P}_2$
yeah, you said we cant have linear combos out of it?
then a subspace would contain linear combinations of polys of that form
the definition of subspace hasn't changed just because it contains polys
it has to be closed under sum and scalar multiplicaiton
i.e. it contains linear combinations of those polys
I said what if is a subspace of just polynomials and not linear combos but Idk if thats even possible lol
ohhh , so wait in that sense are polys a subset of linear combinations. Can you convert any poly form into a linear combo
Any vector at least in finite dimensions can be represented as a linear combination
what do you think a linear combination is
I dont know lol
ah okay
You can write a polynomial as a linear combination of polynomials, yes
anyway, the answer is yes. a linear combination of 1, x, x^2, ..., x^n for an nth order poly, for example
Every span of any basis in every finite dimensional vector space are linear combinations
eh.. i am not american. seems like span means something different then
Forgive me senpais I am a coding major not math
span just means what you can reach given a set of vectors
i'm not a math major either
ie the span of a set of vectors is all linear combinations of those vectors
if the set is a basis of V, then yes
REEEE i need a diagram
yeah but it seem like span is a span iff it is a subspace aswell? We dont have that condition here, we just say a span of a set of vectors are just linear combinations
LOL
i think you'll have to start again from 0
a span is the smaller linear subspace that contains a set of vectors
the definition moshi is using is a consequence of that
wtf is this

that's the fundamental theorem of linear algebra in a picture
you're like 100 years too early to look at that
LOL
V is a vector space which is a set of vectors with addition and scalar multiplication that satisfies the 8 axioms/properties
a subspace is a subset of the vectors that meet a requirement
the span of a set of a set of vectors is all the vectors in V you can reach using a linear combination
a basis of V is a set of vectors in V which are all independent and span V
Ok so, I have notes on all this but my fundemental understanding of all of it is trash
pretty sure that's the summary of what was talked about?
good summary
Ok do maybe where I am not understanding is what it fundamentally means to have a linear combination. Lemme google
ok so if I have a set of vectors {u,v,w}, then a linear combination of them is au+bv+cw where a,b,c and scalars of the vector space
interseting... so vector addition essentially?
on steroids
but the set itself is any possible combination of those vectors?
the set is just any number of vectors in V
oh
could be 3 could be 100
Yes
ahh
any addition of them w/ any scalar in front of them
i see
so for example, the 0 vector is always in the span of any set of vectors
just set all the scalars to 0
is there a similar linear multiplication combo
is that what its talking about * closure
- closure is scalar multiplication
so when we define a vector space, we usually say "V is a K-Vector space", where K is the scalar field
I guess im trying to say
(notation may vary, some use F instead of K)
is there a set of vectors {u,v,w}, combination of them is aubvcw where a,b,c and scalars of the vector space
Multiplied
No
or subtracted for that matter
true
should've been added up there, and the scalars are not in the vector space
Why is there not a multiplication of vectors in the vector space
That's beyond my scope to give an exact answer lol
I know It was edited as an example lol
See polynomials
Oh, that would in theory be the dot operations though right
dot method or whatever
Oh true, the set of polynomials of bounded degree means multiplying 2 vectors means you get a degree higher
Oh
I think I get the just of this now, its starting to come together
$V=\mathbb{R}[t]_{\leq 3}$ then $t^2\cdot t^3 =t^5$ which isnt in V
moshill1

So you're saying this would just result in a higher degree polynomial

no cause those are cartesian vectors not polynomials
then you'd need to introduce an inner product
then the dot product is an inner product

see algebras 
See finite dimensional linear algebras
Hmmm yes, I think this is getting to advanced for a basic linear algebra class but. I get the jist so far. So you have V, W, and S which W and S are just subsets, S specifically being linear combinations. So , if it's linearly dependent then... a1v1 + a2v2... = 0
and if its independent... every scalar... is 0?
nah
cant be right
My notes are trash
if a1v1+a2v2+...+anvn=0 only when a1=a2=...=an=0, then the vectors are independent
so the scalars are 0?
Yes
wouldn't that just make every vector 0
Yep
...........
If making all the scalars 0 is the only way to make the linear combination = 0, then they are independent vectors
so thats the only possible way to have a vector space that's not linearly dependent
Independence: If the only way the linear combination is 0 if making the scalars all 0, then they are indepdendent
If there are scalars which are not all 0 and the linear combination is 0, then they are dependent
Oh right cause both are actually 0
so the difference is the value of the scalars
if its 0 or not
all 0
my bad
wait lemme think
Well, if you add two vectors you get a new vector
however if you add two paralell vectors you cant change the direction of the resulting vector right?
Yeah
In other words you definitely cant write all vectors in R^2 as linear combinations of two parallel vectors
since two parallel vectors are dependent of each other
Consider the standard basis in $R^3$ which are basically unit vector of each axis in the room.
$e_1 = (1,0,0)$, $e_2 = (0,1,0)$ , $e_3 = (0,0,1)$
You can construct any vector in $R^3$ by adding these vectors after scaling them. In other words every vector in $R^3$ can be written as a linear combination of the standardbasis $\underline{e}$ like the following:
$$v = \lambda_{1}e_{1} + \lambda_{2}e_2 + \lambda_{3}e_3$$
$$v= \lambda_1\begin{pmatrix}1\0\0\end{pmatrix} +
\lambda_{2}\begin{pmatrix}0\1\0\end{pmatrix} +
\lambda_{3}\begin{pmatrix}0\0\1\end{pmatrix}$$
$$ v= (e_1 , e_2 , e_3) \begin{pmatrix}\lambda_{1} \ \lambda_{2} \\lambda_{3}\end{pmatrix}$$
$$v = \underline{e}\begin{pmatrix}\lambda_{1} \ \lambda_{2} \\lambda_{3}\end{pmatrix}$$
rts

where the lambdas are any real number
okok
Right so it depends on the value of the scalar
otherwise if its just 0 its an independent vector. Just one of them
yeah, each scalar here is also the coordinate of the vector
well actually becomes 0
$$\begin{pmatrix}\lambda_{1} \ \lambda_{2} \\lambda_{3}\end{pmatrix}$$
Is the coefficient matrix or the coordinates of the cartesian vector
rts

coordinates?
wait no
its each lambda
which contain coordinates
I dunno
Im dead
LOL
yeah, in a room you have xyz coordinates right, so each point in the room is a tuple
$(\lambda_{1}, \lambda_{2}, \lambda_{3})$
rts

Oh right
each vector in the room is basically just any point in the room
true
and each point is represented as a tuple
ok, so when you scale that .... point
is what you're getting at
gives you another point
based on the scalar value
yep
it is only the origin if
all three coefficients are 0
lambda 1 doesnt not have to equal lambda 2
you can select any arbitrary coefficient
so , its linerally independent when all coefficents are 0
oops
no
It is linearly independent if all coeffiecient being zero is the only way of achieving the origin
? isnt that the only way
.... and dependent otherwise
for any e value here mutliplied by each tuple
which e is the scalar
Well consider the following two vectors in R^3
(2,0,0)
(4,0,0)
Are they linear independent?
No?
correct since i can construct (4,0,0) by scaling the first
in other words
$\lambda_{1} = \lambda_{2} =\lambda_{3} =0$ is not the unique solution
rts

So its only independent if its the origin , since scaling an origin is just 0 and cannot produce another solution?
no, it is independent if and only if the only way you can scale a vector to the origin is by setting all scalar to 0
no wait i worded that bad
its only independent if you are scaling by 0 OR if its the origin
oh
math sure loves to make things confusing
so we have to make each scalar become 0 to get the 3 "tuples" of ( 0 ,0, 0) is what you're saying
which is how you get the origin
but its not independent because of the origin. Its how you get ther
there
the dummy version of what you said here
LOL
SO, the whole reason I wanted to make sure I understood this part is because in my notes the basis is ... essentially vectors in V, that both span V ( meaning they have to be linear combinations ) , and are linearly independent... ( meaning those vectors when multiplied by scalars of 0 must be the only way to get to the origin) ?
you still don't understand what a linear combination is
you will have to stop trying to put the math into your own words, because you are doing that wrong, and really read and understand it
Im trying my best dude i feel like you're being a little agressive there
Its not like i'm here trying to get help with homework cause im lazy and dont want to try. I'm actually trying to learn and understand these concepts. Especially coming from a different background and only taking advanced math for about 2ish years. I'm trying to put it into my own words to better understand it because mathematics uses a lot of jargon.
Putting it into your own words is fine, but when those words are wrong then it's a problem
Right, i'm trying my best to make sure i'm remembering your definitions you gave me
find L1 and L2 in vector form first
Was there something wrong with this Edd I thought this was a good summary of what I just learned. Just point out where its upsetting you. SO, the whole reason I wanted to make sure I understood this part is because in my notes the basis is ... essentially vectors in V, that both span V ( meaning they have to be linear combinations ) , and are linearly independent... ( meaning those vectors when multiplied by scalars of 0 must be the only way to get to the origin) ?
I was just more so upset he's saying im not trying to understand it, its not a big deal i just wanted him to know I am trying
.
as long as the position vector of 1 isnt on 2 and vice versa, then they're parallel and different
Lol well yeah you learn over time
You cant just try harder and suddenly understand it
LOl
I'm going to do practice problems later , but I was getting a better understanding for now
Consider
v =(2,0,0)
u =(4,0,0)
The linear combination of these two
$\lambda{1}v + \lambda{2}u$
I wanna check if they are linear independent.
They arent, because i can achieve the origin by setting $\lambda_{2} = -\frac{1}{2}$ and $\lambda_{1} =1$
$$\lambda_{1}v + \lambda_{2}u$$
$$\lambda_{1}(2,0,0)+ \lambda_{2}(4,0,0)$$
$$(2,0,0)- \frac{1}{2}(4,0,0) = (2,0,0) + (-2,0,0) = (0,0,0)$$
@wintry steppe
rts
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

@wintry steppe
https://www.youtube.com/watch?v=k7RM-ot2NWY
Home page: https://www.3blue1brown.com/
The fundamental vector concepts of span, linear combinations, linear dependence, and bases all center on one surprisingly important operation: Scaling several vectors and adding them together.
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through Patreon, where sup...
Oh so another way other than a1 = a2 = 0
I love this series, was too general though
Eh , he doesn't go into formal definition really
where I am confused at
was still a good video though, love the visuals
Thank you
I mean I learned way more from you guys then that video
There are big limitations to short-form videos
haha
Also what you just wrote is a way better way of writing what was in my brain that I was trying to say. I just wrote it like garbage. So thank you
I will re-watch it , and try more practice problems. If yall dont mind I have like 2 more formal definitions that are still confusing
anyone is welcome to answer
also, I will say it rn, excuse my garbage math communication skills LOL
So dimension is just simply the number of vectors in a basis then, and thats it?
Seems to simple
that is it
thank god
for finite dimension
i have no idea about infinitely generated vector spaces
Yeah, R^n is the set of all n-tuples, each tuple in the set represent a vector or rather a point. The basis of R^n is a set of n vectors
Makes sense and the dim of an empty set is just 0
the empty set isn't a vector space
but {0} is
and it has dim 0
thats what i meant
lol
thanks terra, i didnt know
i actually didnt know tbh
because we say the basis of {0} is {} (think about this)
I'm looking at my notes and see dimV{0} = 0
yup
dimension = number of elements in a basis, so if you have no elements in your basis...

yes
I should have said so the dimension of an empty basis
my bad
So , homogeneous systems are just Ax = 0 , which lead to weird problems with finding a basis for R ^n?
Ax=b , b!=0 is not a subspace of R^n which makes it non-homogeneous
and easier to find a basis..... of
I guess
And finally they mention Iso morphism and Ranks
and good resources for those?
I didn't check if 3blue1brown had anything on that yet
Is this really true? Are you saying that the solution space to that equation is not a subspace?

sorry lol
nah nothing to be sorry about. That was the only way to interpret it actually i was just dumb since im an ESL
English Secondary Language/Learner
Ah yea, makes sense
Doesn't make you dumb its just harder to understand

Actual makes you smarter imo because you can understand concepts in multiple ways
help needed on highlted part
Oh god i gate cofactors
The only way I know how to do it takes literally forever
I’m a bit confused about this guys explanation of what’s going on with Fourier series. So I feel rather lost and was wondering if any one fot some good material or a nice explanation. So he presents it as you have a 2d x y coordinate system and then u put some vector f in there. The thing I’m confused about to start with is that does he mean vector d as a function vector where it’s inifinite dimensional or does he mean something where the x coordinate it the input and y is the output like in a graph? And then he talks about how the Fourier coefficients are really just the inner product of this vector f with some other coordinate system than x y. Which I assume is cos sin in hilberr space? And even if I accept this I don’t quite see why the cos and sin terms are approximations that get better and better with more terms. So in conclusion I think I need to take a step back and get some good learning material
Hope this is the correct channel
I don’t feel like the notation where the f vector is a function vector with infinite columns (well one for each point) makes sense here since they’re talking about a set of 2d spaces which would require infinite it to be even but I don’t quite understand how the first notion with x input and y output offers an explanation to how and why it works? And how would it make sense to take an inner product of f to cos and sin. So in this context it’s a 2 column infinite row vector of x y coordinate that’s supposed to be translated to a cos sin infinite row vector? And most importantly how they can find the best way to scale this cos and sin values to come as close as possible to f

This video will show how to approximate a function with a Fourier series, which is an infinite sum of sines and cosines. We will discuss how these sines and cosines form a basis for the space of functions.
Book Website: http://databookuw.com
Book PDF: http://databookuw.com/databook.pdf
These lectures follow Chapter 2 from:
"Data-Driven Sci...
Can anyone help me with this one?
what formula relates adjoint, inverse, and det of a matrix
@nocturne jewel my initial guess right now is -4 * -5
since inverse = adj/det
if I solve for adj
$A^{-1} = \frac{adj(A)}{|A|}$
inverse * det
moshill1

yes
@nocturne jewel https://i.imgur.com/UlyDC5S.png
I'm thinking this one is C
cause distribute?
Nah this is a practice study guide for my midterm next week
Just trying to get some stuff in
If I remember correctly I think the property of C is valid
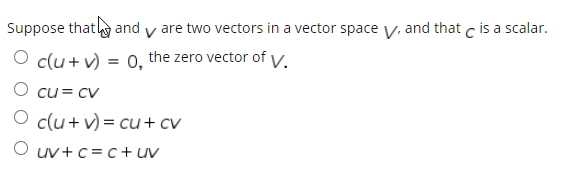
@edgy kelp this asks what's true for all u,v,c and in an arbitrary vector space, and yes C is the only one by definition of vector space
if there is a constant (for ex. the 2 in 2+3s) within a set, will it never contain the zero vector?

or do i have to create a set
[0 2 0 0] + s[1 3 2 3] + t[-3 0 1 0] like this and see if there are any linear combinations of s and t that equal [0 -2 0 0]?
@wintry steppe the only possible way this could be a 0 vector is if 3s=0. However, if 3s=0, then 2+3s=2, so there is no 0 vector.
If there is a row in which s and t are by itself, then your claim holds.
So for $W=\begin{bmatrix} a_1s+a_2t\k+a_3s\a_5t+a_6s\a_7s \end{bmatrix}$. Regardless of the constant, this should not have a zero vector.
dackid

gotcha
Let V and W be finite dimensional vector spaces. Let $T : V \rightarrow W$ be a linear transformation. Let $T^{t} : W^{v} \rightarrow V^{v}$ denote the dual linear transformation. Prove that $rank(T) = rank(T^{t}).$
Deku

im so uncomfortable with dual spaces lmao
rank nullity thm huh? so I should prob take an element in ker(T^t) then.. show its in the image of T?
pick bases and recall that row rank = column rank and that transpose of linear map corresponds to matrix transpose in coordinates
row rank of A = column rank of A^t? where T represents matrix A and T^t A^t

it's a legitimate way to do the problem, you can prove that row rank = column rank without using the fact that rank(T) = rank(T transpose) for linear maps
something like that
always was
where's fadey when you need him
ok thanks I'll think about what you said a bit more 
you should also ponder whether there's a nice coordinate-free way to do this, e.g. by constructing an isomorphism between the image of T and the image of T transpose
hm
its not obvious to me how to but I'll give it some thought
appreciated 
oooh
it's not entirely obvious to me either what the isomorphism should be, but if you can avoid picking a basis, you should
(maybe this is one of those things you need finite-dimensionality for?)
(try checking infinite-dimensional cases and see if it breaks down, thus necessitating the use of a basis)
yeah I think so, so far in my class we don't know how to deal with anything infinite lmao
ooooh true
thanks guys you're very helpful :')) I understand the question a lot better
I can see rank nullity theorem is prob gonna be what closes up the proof
i imagine it is something you need finite dimensionality for, since without making (non canonical) identifications you can't quite relate $${ \varphi\circ T : \varphi \in W^* }$$ and $${Tv : v \in V}$$
(T*Terra, dqⁱ ∧ dpᵢ)



$$T^t(W^)={T^t\varphi:\varphi\in W^} = {\varphi\circ T : \varphi\in W^*}$$
(T*Terra, dqⁱ ∧ dpᵢ)

i mean you facepalm but this isn't evident to me :'))
this is just a chain of definitions
same
oh boy
gotta love bad notation
like when you talk about sequences of sequences converging to a sequence in analysis

you can get 3 equations in terms of scalars for a,b,c and solve the system
like???
d = xa+yb+zc
yeah they give very different answers
Is this wrong?

yes
whaddya reckon -32-12 is
is this not the correct work?

no it is not
what am I suppose to do?
how did you get +4*3 in the first line
I was following my notebook
second line +(-1*3) is also wrong
Well, you're following your notebook wrong or your notebook is wrong
You should be adding the 4*-3 in the first line
why -3?
from the second entry in the second matrix

you should multiply the red together and the blue together then add the red and blue
to get the first entry in your result
You forgot the sign in the second entry too lol

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ah that makes sense lol
no worries mate
i thought i was going insane
Can someone explain the first one so I can try the second myself? Thanks a lot. I'm completely stuck

If both of those vectors, [1 1 1] and [2 3 4] are in the nullspace
Then [1 2 3] is just a linear combination of the two
How do we know both are in null space?
Oh wait! If we let (1,1,1)=B and (2,3,4)=C and AC-AB=0 since AB=AC and since AC-AB=0 we say A(C-B)=0 and since C-B is the given vector, we can say true?
@tame mural those vectors aren't in ker(A)