#linear-algebra
2 messages · Page 182 of 1
no, because lets assume 1 norm is 3
then i have 3a <= 6 <= 3b
i can pick a and b that sattify this
.
and if 1 norm is x, i can do the same
I'm just going to start quoting messages I've said already
because I'd rather stop repeating things for the fifth time
Yea. a and b must be constants
okey, then what a and b will u chose?
u said they are equivalents, so there must be some constant values that sattisfy the inequality for all the polynomials
I recommend you go to #precalculus or one of the question channels. Regardless if this is linear algebra or not, this channel is already pretty involved in something right now.
.
tell me the a and b and i will try to find the polynomial
Oh, are you talking about my example now
yes
To show they're equivalent, you want to find numbers a,b such that a||x||_1 <= 2||x||_1 <= b||x||_1 holds for all vectors x
Do you agree with this?
yes
So you just take a = 1 and b = 2 for example
Hold on, shouldn't a and b be multiplying the same norm?
For the sixth time, I complained about this because you are trying to show that two norms are not equivalent
Seems ya fixed it
I just complained because I didn't understand you were talking about my example
I thought you were talking about your original problem
ah okey, i see it
so a=1 and b=2 holds the inequality for any P(t)
right? right
yes
okey so, on my problem, they arent cuz i cant find a,b that holds for any P(t) cuz i can always increase the value of n, right?
please tell me yes
yes
 _||
_||I agree
okey xd
But just saying that your vector space is infinite dimensional is not enough
Like i showed
ye ye, okey, i got it
So saying that you have infinitely many polynomials is not enough of a justification
fair
ty
😦
///<
sorry if i missexplained but wasnt my intention to say inf-dimensional = justification. I was trying to say that i could do it cuz it was inf_dimensional
i dont use to talk about maths on english so sometimes is hard for me
thhanks to closed captions and it's sam i understand now
i have another question

this is the notes i took
i'm not sure what gamma is doing

it looks like the teacher just calculated T(1,0) and T(0,1) and then transposed them
That is normally what you want to do, because T(1,0) and T(0,1) transform the basis and therefore your vector space
Plus, they tend to be easier to evaluate

for b, either two equations must coincide and the third is not parallel to them, or all equations are distinct and intersect at one point.
I'm not sure how to mathematically express this.
Please check:
For case one $\abs{\frac{a}{b}} = \abs{\frac{c}{d}}, k = l, ex + fy = ax +by$, this also works for any other pair to coincide and the third not parallel to them.
az

For case two $\abs{\frac{a}{b}} \neq \abs{\frac{c}{d}} \neq \abs{\frac{e}{f}}$ and there exists $(x, y) \in \mathbb{R}^2 | ax + by = cx + dy = ex + fy$
az

then for this question: do i just evaluate T using beta and ignore alpha?

Alpha is the space in which u r doing transformation
But yeah u don't have to worry about it while doing transformation
alright thanks!
i dont think youre supposed to do this in terms of the variables themselves tho
they ask for a desc of the relative positions of these lines
HAHA my teacher wrote this https://media.discordapp.net/attachments/814219153669619731/817833486936309830/unknown.png

Yeah
depression
can someone help me with this problem ? I don't know where to start !!

I'm sorry, I do not know french well enough to be useful here.
can I try to translate it for you ?
I'd definitely appreciate that.
Can you also tell me what the upside down v means for this? I have never seen it used for vectors
my wild guess is that 18 is the triple product so that would be the cross product, but then we would have a problem at trouvez l'angle entre...
So, in this tetraedron, we have the coordinates of W= (2,2,1). We also know that the face (triangle) formed by U and V=6 units.
The product of UV by W= 18
I thought about it but, nothing specifies that it's regular. I'm absolutely lost here !
is that $(\ora{v} \times \ora{u}) \cdot \ora{w} = 18$?
az

yes !
this would make sense because the triple product is also the volume of the parallelpiped that is formed by the three vectors v, u, and w
if you find a relation between the parallelpiped and the tetrahedron that may help
can we say that all the vectors (u,v and w) have the same length ?
I think that is a bit of a jump
then, I know about W the most right ? ... what could I do with it ?
could I maybe divide 18 by W to find what the product of v and u should be ?
Sadly no. Dividing by vectors is a no no
Also, keep in mind a dot product is not "normal" multiplication
you mean the area of a surface?
no sorry I mean the triangle made by U and V = 6 surface units
Wait, that's good!
The triangle made by $\vec{u}, \vec{v}$ is $\frac{1}{2}||\vec{u}\times\vec{v}||$
dackid

should I isolate one of the 2 vectors ? or is it too complicated after?
I know what I did is wrong but it might take us somewhere ...
1/2 (uxv) =6
If we isolate u and say that u=3/v
Does it make some sort of sense ?!
Again, we cannot divide vectors
dackid


No no. $\vec{u}\times\vec{v}\neq ||\vec{u}\times\vec{v}||$
dackid

The left side is a vector and the right side is a scalar
is that directed at me?
It is directed at this claim
ah, having the magnitude of h may help here
Oooo, so here is something interesting!
$(\vec{u}\times\vec{v})\cdot \vec{w}=||\vec{u}\times\vec{v}||;||\vec{w}||\cos(\theta)$
This will actually get you really far!
noice
dackid

Yup ! Got it
Okay. Use that identity and it should take you home free!
Thank you so much for the help ! It almost feels like I won the Olympics or something 😂🥳
It's a good feeling indeed :)
What was the problem anyways? You gave us a lot of givens, but not any goals xp
The final goal was finding the angle formed btw uv and w
I think I have everything I need with the last formula. Thanks again !!
Sweet! Glad we got there in the end
If I have 2 3x3 matrices M and N, is showing their determinants arent equal sufficient to showing they arent similar?
similar?
oh, right
Yeah wasnt 100% sure on if that was always the case
equal up to change of basis
ok
it's also one reason you can give a good definition of the determinant of a linear operator and not just a matrix
something to keep in mind

dackid

Wait, you are talking about similar. What does it mean for two matrices to be similar?
Is it this?
A and B are similar if there exists a matrix P so that $A=P^{-1}BP$.
dackid

yes
that is the correct definition of "similar" for matrices
that is also the correct definition of "symmetric" for matrices
Okay thanks. I wasn't sure if my memory served correctly, so I just wanted to make sure.

i need help finding the parametric representation of a hyperboloid
I'm having difficulty parsing the definition of the dual basis
And also really of getting an intuition for just what this is
what part of the definition is confusing you
(share the definition you're working with)

indicator function?
Oh, I had thought 1 if k = j, 0 otherwise was a type of indicator function
perhaps mistaken
you're defining a linear map by how it acts on a basis
this is perfectly fine, right?
since a linear map is completely determined by how it acts on a basis
you could write $\varphi_j(a_1v_1 + \cdots + a_nv_n) := a_j$ if you wanted
(T*Terra, dqⁱ ∧ dpᵢ)

it's basically a projection to the jth coordinate, in the basis (v_1, ..., v_n)
sure
which was the notion of a basis of a vector space over a field, which was a set of linearly independent vectors
what are you thinking
Well, are the elements of the dual basis also linearly independent? If they are, I'm not sure how to conceptualize what a linearly independent set of elements of linear functionals is
sorry if that is a bit disjointed, not sure I expressed that properly
it's expressed perfectly and is a good question
they are indeed linearly independent
(it's called dual basis for a reason)
it's the same notion of linear independence, but the elements you're working with are linear functions V -> F
to say that something in V' is zero is to say that it equals 0 on every vector in V
so if you wanted to write out what the phrase "$\varphi_1, \dots, \varphi_n$ are linearly independent" means it'd be: if $a_1, \dots, a_n \in F$ are scalars such that for all $v \in V$, $$(a_1\varphi_1 + \cdots + a_n\varphi_n)(v) = 0,$$ then $a_1 = \cdots = a_n = 0$
(T*Terra, dqⁱ ∧ dpᵢ)

i.e. if the dual basis element $\sum a_i \varphi_i = 0$, then the scalars $a_i = 0$
(T*Terra, dqⁱ ∧ dpᵢ)

that's what that means
you should use this to verify that the dual basis elements are actually linearly independent, it's a good exercise
and then, since V and V' have the same dimension, it follows that the dual basis is actually a basis
Okay, that certainly makes sense, I'll try that exercise, as well
Ah, okay, the definition they provided was just a way of selecting each phi so that we have a linearly independent set of phi's much as we would with a basis for a vector space
This particular one, or the general form?
the dual basis construction
I'll make sure it makes sense, but I'm curious if that's because the dual basis construction pops up a lot or for some other reason?
it's important in linear algebra in its own right
if you do anything that involves multilinear algebra you'll need it
e.g. differential geometry uses dual spaces a lot
Okay, yeah I can't say that I immediately see why this dual basis would be significant, but we've just touched on it
it takes some working with it and seeing it in other places to see why it's important
imo
okay! noted

Ahhh. Thanks for letting me know
so... what's giving you trouble here
Ik that I have to do this: det([a - l, b]) = 0
[c, d - l] but I had a hard time doing this right
this is badly formatted
but yes... you need to calculate $\det\bmqty{8-\lambda & -7 \ 6 & -5-\lambda}$ and set it equal to zero
Ann

do you have work to show as far as that goes?
Not always
what do you mean, "not always"
this is one particular problem
do you have any work that i could look through, or not?
Like whenever my prof feels like it but not for this question
okay then what exactly is giving you trouble with doing it for this question?
The formatting really, like end result. That's all but you made it simple for me so thank you.
you don't need to lie to me if what i've been saying has been utterly unhelpful to you all along.
I really wasn't. Nono I don't mean anything like that.
Thank you and I'd like your help in 5 mins if you can wait.
sure, ping me once you need
I obtained this: 5l+lλ-8λ-82
eh?
and so I tried entering this but it won't accept I
what's this business with l and lambda being separate things
i know it's a lowercase L
and i typed one in my message
what i'm asking is
why do you even have $l$ and $\lambda$ in there at once?
Ann

there was no way you could've taken $\det\bmqty{8-\lambda & -7 \ 6 & -5-\lambda}$ and ended up with something that has the letter $l$ in it
Ann

I simplified this: \left(8-l\right)\left(-5-λ\right)-\left(-7\right)\left(-6\right)
$\left(8-l\right)\left(-5-λ\right)-\left(-7\right)\left(-6\right)
why? why do you have an L in there???
where's it coming from?
why do you write L in one spot and lambda in the next???
oh my bad, typo. I meant to add lambda
well this typo somehow slipped by you at all stages of the algebra
also, the lower-left entry of your matrix is 6, not -6.
\quad λ=\frac{3+\sqrt{337}}{2},:λ=\frac{3-\sqrt{337}}{2}
Eh thanks for that comment.
redo the problem, but now be extra, extra careful about what youre writing.
you should start with: (8 - λ)(-5 - λ) - (-7) * 6
yea so i did that and obtained lambda = 3+- sqrt 337/2
you must have made an algebraic mistake somewhere.
i will need you to write out your work, in full, preferably on a piece of paper, and post it here so i can look over it and tell you exactly where you went wrong.
Sure one sec.
be extra careful, and triple-check every single move you make.
i will need you to write out your work, in full, preferably on a piece of paper, and post it [your work] here
you keep giving me just the answer
i want your work
show your work

yikes
okay
so
youre skipping over ALL the steps i was interested in
and you keep writing -6 in the matrix when there was never any -6
the lower-left entry of your matrix is not -6
it's 6
positive 6
not -6
just 6

sigh
youre skipping over the step where you work out the determinant
which is what i wanted you to showcase
but yes now your determinant is correct, it's λ^2 - 3λ + 2
ok I got another question
yes?

mkay, what's giving you trouble here?
How do I do this.
well they give you $P^{-1}AP = D$ for free
Ann

this could also be restated as $A = PDP^{-1}$
Ann

do i need to explain in more detail why those two are equivalent?
I don't understand the K
Can you gimme 3 mins, my sibling is calling me
I can row reduce augmented matrices, but I'm confusing Gaussian and Gauss-Jordan elimination. Is it important to know them from one another? And if so, can someone give me a rule of thumb that helps me remember them?
it doesnt really matter
OK
So we just started on determinants in class, and I was just checking my work for a problem using a matrix multiplication calculator when I saw tht you could calculate the determinant by finding the product of each element in the diagonal?
But only in RREF though?
no, that trick works whenever your matrix is triangular
plus, RREF doesnt preserve det
I'm alive
Oh yeah that makes more sense lol, thank you
Would you mind explaining why it works after you're done with Barbie?
Oh wait I see why it works
I understand why it is equivalent.
okay, great.
now, can you use the equation $A = PDP^{-1}$ to tell me what $A^2$ is, in terms of $P$ and $D$?
Ann

(note: the answer is \textbf{not} $P^2 D^2 P^{-2}$!)
Ann

Well A^2 is A times A. Which is
which is...?
25, 24, -16 and -15.
uh
i couldn't give half a shit about what the actual entries of A^2 are
and you didn't answer my question
which i politely ask you to read in full
can you use the equation $A = PDP^{-1}$ to tell me what $A^2$ is, \textbf{in terms of $P$ and $D$}?
Ann

Hold on


she asked for A^2 in terms of P and D, not in terms of their values
that is STILL not what i'm asking you to do.
just find A^2 for arbitrary P and D
PDP^{-1} -> is the equation that can be used
Pretend you don't have values for A, P, D, or P^-1
We add ^k to d.
hi ann
I'm trying but you have to stop with the sarcastic comments, everyone has there own pace.
*their
i'm not being sarcastic
you went from 0 to 100
in a near instant
$A^k = PD^kP^{-1}$ is what i was trying to build up to
Ann

i expected you to say $A^2 = PDP^{-1}PDP^{-1}$, then cancel out the $P^{-1}P$ in the middle to get $A^2 = PD^2P^{-1}$
Ann

Okay so we have to add K in the matrix next to 3 and 1 in matrix D.
no you don't "add k"!!!
nothings getting added!! the k is an exponent, not an addend!!!
I know what you mean I am great at visuals then explaining I guess.
it is important that you learn how to explain yourself properly
^
is the channel free or does barbie still need help?
still
also, i don't really know how to feel about you saying "i know what you mean" when you spent the last 10 or so minutes not knowing what i meant at all
alright
anyway, ok, fine, you jumped ahead, and now we know $A^k = PD^k P^{-1}$
Ann

it is now that we remember we know what P and D are, and that we know how to raise D to the k'th power
mhm so I was doing the math and I obtained the anser
*answer
Gimme a min
Row 1 is( 3^k+2 ) -4 and 2 times (3^k+1) -4
and row 2 is -2 times (3^1+k) - 4 and -4 times (3^k) +4
$\bmqty{3^{k+2} - 4 & 2 \cdot 3^{k+1} - 4 \ -2 \cdot 3^{k+1} - 4 & -4 \cdot 3^k + 4}$
Ann

is this your answer?
this is incorrect.
I'll show my math
yes, please do.
i mean, idk about you, but the fact that this doesn't give the identity when plugging in k=0 or A itself when plugging in k=1 is a very big red flag that something went horribly wrong somewhere.

Ann

gotcha so i gotta do
so if we look into my previous answer, for row 1, I remove the ^2 to 1 and -4 to 2, then add in (3^k+1) -3
you have to do it all again
^
I did
then show your new work.
and I am modifying it
no
do not modify your old work.
go directly back to the start, do not pass go, do not collect $200.
alr imma show u
Quick question, when a homogeneous linear system has the same number of equations as unknowns, is it guaranteed that it has always only the trivial solution?
depends on the rank
no
assuming system is linearly independent - yes
but consider
x+y = 0
2x+2y = 0
O, sorry, linear homogeneous system in row reduced form.
x = 0
0y = 0
nah, that's not row reduced
yes, same number of pivot columns as equations -> full rank matrix
i.e. the columns are lin indep
(for a square matrix)
anyway, it is all contained in more simple statement
"rows of matrix/columns of matrix are linearly independent"
I'm still not there formally, but I get it
thanks
that's the same as last time??
this is all the exact same
wrong photo
can't help but notice the similarity

like i said wrong photo
hi az
hey
I'm starting some linear alg 
was told multi var calc without lin.alg isn't that useful/productive
@dusky epoch

okay... let me check this now
okay now you inverted P
but u
uh
something weird happened in your multiplication
wdym do u not see the -1
the 1,1 element uses the -3 and 2 elements from P in its dot product
wdym
i mean look yuor result is the same
so that should be a clear sign youve gone wrong
and where youve gone wrong is youve inverted P
but still used P as the right multiplicator
this is the last result that when wrong.
and not P^-1
theres also the issue of $-3^{k+1}$ morphing into $-3^k + 1$ as if those aren't two very different expressions
Ann

oh yeah didnt even catch that
you're gonna have to do it again and carefully. Maybe writing more neatly can help, and on paper that hopefully hasnt been attacked by kindergartners


that's not what you wrote lol
i transcribed your earlier answer here. this is not mine. it's yours.
yea I know
I'm saying that the previous one is not the same as the one I gave in rn. Narwhal said this: #linear-algebra message
this is the correct answer. it looks like this is what symbolab gave you.
both results are like this one is what im saying
and it is also what i got.
it's the only think that let's me format correctly cause I am bad at texit
I'm not sure where to find matrices on google docs
Alt + = for equation
then use equation inserter
or if you know microsoft language for math it's something like \matrix[a&b@c&d] or something
oh nvm google docs
that's word
idk then
Thank you Narwhal. :p
i dont think you can
i think ima just ask my q in a question channel and come back here when it's free
thank you
@zinc copper i think you could use this, free rn
Since ive posted in a question channel ill just make a reference: #help-3
It's a problem im having with a step by step proof of bezout's theorem in "rational points on elliptic curves" by silverman
shouldn't be 0, the rows are lin indep
use the properties of row operations
what happens if you scale a row, swap rows around, add rows together
Kind of a silly question, but is there a name for joining two columns or rows together into a fatter matrix?
join([1 0 0], [0 0 0]) = [1 0 0; 0 0 0]
i can modify, the default is 0
@tame mural vertical concatenation?
Identify the row operations used to get to the second matrix and then modify the value of the determinant based on how those row operations affect it
how do i obtain this?

Get the row echelon form
Do the row operations
row 1: -125, 25, -5, 1
row 2: 0,72/5,48/25.152/125
row 3: 0,0,-12/5,12/25
row 4: 0,0,-16/15, 208/225
I did that
row 1: -118
row 2: 0
row 3: 0
row 4: 0
So by row 3 you have -12/5 c +12/25 d =0
Bring the equations back
And try to solve them
But I think you can make it simple than this
wait i'm confused
Just like this
Write all the equations back from the matrix
Like row 1
-125a+25b-5c+d=-118
0a+72/5b+48/35c+152/125d
=0
0a+0b-12/5c+12/25d
0a+0b-16/15c+ 208/225d=0
Yes
But I think that u can bring it in more simple form
The calculations are too big
@fervent gulch I'll tell u some row operations you follow them
ok
0, 18,0 2
27 0 3 0 will be row 1
ok wb the next
0,0, 0.48 and 12/25 then 0, 7.2 and 0.608. DEf feel way off
yes
Left side I got
9010
0901
1,16,9,0
8,-8,0,0
And right side
12
6
44
0
Ok
So the equations are
a+c=12
b+d=6
a+16b+9c=44
8a-8b=0
Now by 4th one I get 8a=8b
So a=b

Oh
So p is like ax³+bx²+cx+d
So yeah first row
27 9 3 1
Yes all rows are right
And after row operations see the equation we got
From here
So I get a=b
And c=12-a
Now substitute this in 3rd equation
We get a+16a+9(12-a)=44
Get a by this
16a+108=44
a=-4
So b=-4
c=12+4=16
i was gonna type a for ya
d=6+4=10
I think u can do that so np
We got all the values
So write the polynomial


Do u get it?
yes i was just being a bit dramatic
Ok do the next part then

What is it?
Is it a bad habit if I row reduce my systems with a CAS? it's boring and I make silly mistakes. I don't see much learning in doing them by hand.
If you still make silly mistakes, then I would practice more
Until the task becomes so trivial that needs to be automated
What kind of mistakes you make?
like forgetting a minus sign, or miscalculating a product and addition when doing part of it mentally, etc.
not conceptual, I dare say
Oh
Then go ahead and automate it
if it's not required for a test or something
The conceptual part is the important thing
yeah, no, I guess it's partly bc I'm not motivated enough anymore to do them
because they started to become boring
thanks
I would first check to see which of the two points lies on the line, A or B
suppose it's A
then by definition, there is a line that goes through B and intersects the line at 90degs
you mean how to check this, or why doing this?
OK, you have two points of a triangle, and looking for the third
you also know that the third lies on a given line
so, by definition, this given line is one of the three sides of the triangle
right?
when you find which point lies on this line, you also find out which point does not lie on it
bc there is C on this line
you find the other one
so the remaining is one point that does not lie on this line
right?
nice
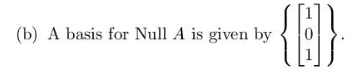
When the null space of a certain matrix is
x_2 u + x_4 v + x_5 w
Where u, v & w are vectors
Is the basis for such a null space just
Span{u, v, w}?
not unless u, v, w are all linearly independent
and the span isn't the basis
I presumed that they were linearly independent, I guess I misinterpreted what the book is trying to say

In fact, the construction of u, v, and w automatically makes them linearly independent, because equation (1) shows that 0 = x_2 u + x_4 v + x_5 w only if the weights x_2, x_4, and x_5 are all zero.
I don't really understand why this is the case
When can I, and when can I not conclude that they are linearly independent?
you can verify linear independence by checking the definition of linear independence
in this case, because you row reduced the matrix, the rows are automatically linearly independent
(as you ended up with no 0 rows)
I have, it's just difficult for me to follow to be honest
i mean the definition of linear independence is that
this equation
is 0 only when x_2, x_4, x_5 are 0
but that must clearly be the case here
What do you mean with 0 rows? Since the latter is all zeros. Or do you mean zero on the left side? It would always be fully 0 if the left side is 0, no?
sorry, let me rephrase
you ended up with rows where only one entry is nonzero

in order for the sum of these to be 0
since the circled entries are the only nonzero entries in their row
they must all multiply with their scalars to 0
which means x_2 must be 0, x_4 must be 0, and x_5 must be 0
hence these vectors are linearly independent
That makes total sense, thank you

asterisk can be any real number
I need to decide existence and uniqueness
I thought this is inconclusive
what do you mean? existence of solutions to Ax = b?
Another definition for independence is that every vector contributes to the span.
bc of $a_{14}$
az

if it's anything other than 1, this becomes inconsistent
if it is consistent, there are infinitely many solutions
but we can't say if consistent or not
yep
If they were not linearly independent, would that mean the basis would be the zero vector?
Then what would be the basis if that was not linearly independent?
find a set of vectors that is linearly dependent
remove one in such a way that makes the set linearly independent
repeat until all your vectors are linearly independent
that's a basis
That is what one does for the basis for a null space? I didn't come across an example like that yet
i feel like youre getting wires crossed a bit here
But row reduction would make this unnecessary, right?
im talking about bases in general
in the context of working with null spaces and row reduction you typically dont run into these issues
Yeah, I am. Sorry
Thanks for the help
okay I'm sure you've heard of a vector space
this is just a set of vectors
a subspace is a vector space that is a subset of another vector space
a basis of a vector space is a set of linearly independent vectors such that the vector space is the span of these vectors
because the null space of a linear transformation is a subspace, it has a basis
I feel bad for wasting your effort but my lecturer skipped over the chapter covering vector spaces :(
I find it admirable that you two can discuss these kinds of topics with individuals like myself, who are obviously misinterpreting things and reasoning incorrectly. My understanding of mathematics is so shaky that if I was in your shoes, such a conversation would confuse me to the point where I'd doubt what I had learned
so you don't know exactly what a vector space is?
I don't
you can look up the definition on Google or Wikipedia, but I'll try to give you some intuition for it
do you know what a set is?
I do, but I'm worried that being introduced to this would confuse me to the point where I couldn't really return to the material I have to know for the course lol
okay
So a vector space is just a set of things that are called "vectors"
that can be added, subtracted, and scaled by scalars, which are just numbers
forgetting about the field for a second
all of the axioms that you find on Wikipedia are basically just guaranteeing that addition / subtraction / multiplication work like how we're used to them seeing

Projection is a linear transformation
so you can find a matrix that represents this transformation
do i stack the columns together and do rref?
i know the formula for projection but not sure how to apply it
do i just use the vector a and then use this
first, do you understand the question?
what part don't you understand about the question?
so do you know what a projection is?
ye i mean i did go over it once
going over it is different from knowing what it is
do you know what an (orthogonal) projection is?
yes
So if we say that we're projecting a vector v onto span(a), we expect to get another vector out, right?
yes
It turns out that this function that does that is a linear transformation
by that I mean if you project x + y, you get the sum of the projections of x and y
I'm sure you've also heard that every linear transformation can be represented by a matrix
They're asking you to find that matrix
yes
is this not the formula tho?
It is the formula for it
but you should be able to understand why
and not just blindly plug in a formula

yeah
multplied by u
yeee alright that makes sense
$\mathbf z = \frac{\mathbf u \cdot \mathbf v}{||\mathbf v||^2} \mathbf v = \mathbf v \frac{\mathbf v^\top \mathbf u}{\mathbf v^\top \mathbf v}$
Saccharine

just moving the v to the other side
Now if you say $\mathbf z = A\mathbf u$, it's pretty clear what A is equal to
Saccharine

nice, I still have to learn some notation to understand this but sounds cool. I understand the vector form of the projection formula because it's just the magnitude of u time the cos of the angle times the unite vector that we are projection onto
this makes intuitive sense
really excited to learn this
$\mathbf v^\top \mathbf u = \mathbf v \cdot \mathbf u$
Saccharine

O
$A^\top$ is just the transpose
Saccharine

transpose is when you convert rows to columns?
yes
O, we have to transpose for matrice multiplication to make sense
it becomes the dot product
how do i approach this question

Can anyone give me a hint for starting this?

It is only a transpose matrix multiplikation like that if the vectors are given in an orthonormal basis. Otherwise you cant do that!
After reading some LA questions here i can conclude american LA notation is complete garbage
what language do you learn it and what books do you propose?
I have nothing to propose
LA notation seems to vary a lot but i mean it is not that bad
It is just bad notation for beginners imo
that's true
I'm reading this book and they propose different notation already for matrices on introduction
i solved part a and it basically is 0 because A^T b was 0

so what would the comment be?
i was looking over and i thought maybe p(x) is x^3 + x^2 + 3x - 3.
okay so 5^3 + 5^2 + 3x5 - 3 is p(5)

Do you need help with that problem?
dackid

yeah
And solve for $(A-3I)\vec{x}=\vec{0}$
dackid

The solution to that should give you your eigenvector.
That should give you a good starting place
could u show me, i have a hard time visualizing this
Have you solved the equation
$A\vec{x}=0$ before?
dackid

I think so but I tend to forget
Okay, use gaussian elimination as best you can, and then let's see what we can get from there.
That is definitely not what will happen
Sorry Barbie. I fell asleep. Do you still need help?
what is this even asking me to do, isnt this like trivially true from the definition of a basis

yes
fucking cringe

i am reporting you to the gulag
i decline your offer
i decline your decline
jeez zoph lol
reddit
1 vote and 2 comments so far on Reddit
for this problem, does it have to be row reduced into that specific form to get the answer?

when i reduced it to row 1 [ 1 2 0 -2] row 2 [ 0 0 1 -1] i didn't get the right answer
is there a rule where you always have to row reduce in a way that leaves the free variable as the last vector?
Why is Spider-Man so good at comebacks?
Because with great power comes great response ability.
i mean
I was wondering why the ball was getting bigger. Then it hit me
Commander Vimes
$$\begin{pmatrix} 1 & 2 & -3 \\ -3 & -8 & 7 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 1 \\ 1 \end{pmatrix}$$

yeah, agreed
so if i am not wrong in RREF it would be
Commander Vimes
$$\begin{pmatrix} 1 & 0 & -5 \\ 0 & 1 & 1 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 5 \\ -2\end{pmatrix}$$


A police officer just knocked on my door and told me my dogs are chasing people on bikes. That’s ridiculous. My dogs don’t even own bikes
Commander Vimes

ohhh, so that specifically is the correct row reduced form. I guess I have a fundamental misunderstanding as to why only that form is correct, because i do see how and why it's correct, just not why it's the only correct form
yor moving z which is free variable to the RHS we arrive at
x=5+5z
y=2+z
and now you have vector of coefficients in your linear combination as (x(z), y(z), z)
well it is becuase of the way how we define RREF
Two fish are in a tank, one says to the other "how do you drive this thing?"
😄
@wintry steppe jokes are fine but don't spam over ongoing convos with them
just tryna brighten up ur days
alright
but like permuations of rows of the same system can give diff rrefs
(afaik)
oh nice then
i do remember learning something about reduced row echelon form being unique; probably should have remembered that. not sure how I convinced myself the other one was a valid rref
thank you for the help!
yw


I looked up a solution
after row reducing, we get the simplified system of:
sin(alpha) = 0
cos(betha) = 0
tan(gamma) = 0
now, there are 3 solutions for eq. one, 2 solutions for eq. 2, and 3 solutions for eq. 3.
I can't make the mental connections as to how this leads to having 18 solutions.
This is maybe connected to the fact that I'm used to linear systems and this isn't linear.
this amounts to counting all the possible ways you could choose 3 solutions, 1 from equation 1, 1 from equation 2, and 1 from equation 3. By the multiplication principle, that's 3*2*3=18
O, true, that's all the permutations of (alpha, betha, gamma) tuple
ye
thanks
no worries
the difference is that when we dealing with linear systems
there is either a unique solution
or infinitely many
but not something in between
that's maybe what confused me
I mean there could be no solutions
It might help to think of it as being linear in sin(a), cos(b) and tan(c)
but after getting a unique solution for sin(a)=... cos(b)=...
etc
you've only solved for sin(a), cos(b) and tan(c)
not a, b, c
if that makes any sense
You can uniquely determine sin(a), cos(b) and tan(c) since the system is linear in those variables, however determining those values does not uniquely determine a, b, and c.
That probably doesn't illuminate it much further but I'm not sure how to explain it further sorry
Partly I don't quite understand what your gripe with it is
like sin(a)=0.5 doesnt uniquely determine a ofc but you understood that already
what does it mean the system is linear in those variable? Are we referring to the output of sin(a), etc?
helped me further understand
I think I'm starting to see
Oh sure, so in the same sense you might say e^(2x)+e^x+2 is a quadratic
but its not a quadratic in x
its a quadratic in e^x
you can say this system is linear in sin(a), cos(b) and tan(c)
it's like we are packaging the non linearity away and look at them from another level
where they look linear
Oh it would have been a much better idea to give sin^2(x)+sinx+2 as the example of a quadratic lol
then that analogy extends all the way through subbing say u=sinx to solve for sinx=some value being the same idea as subbing sin(a)=x, cos(b)=y, tan(c)=z
and yeah I think you got the idea
can someone tell which book it is

pdf viewer im using lets me invert
thats all i have
and i hv found it
it is a lecture note from
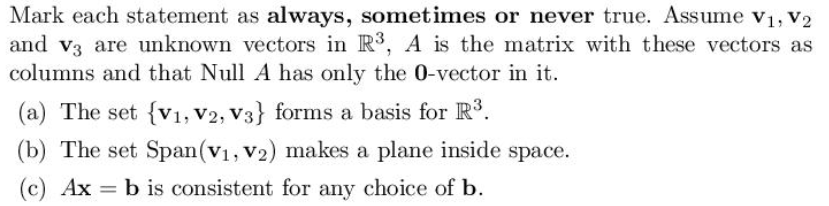
For a, I got always
C, I got never
I'm not sure about B
for B
isn't it never because they're in R3
and a plane is in 2 space?
so
Always, never, never?
why
since null A has only the 0-vector in it
I thought there's 1 solution
so it cant be any choice of b
there is only one solution to Ax = 0
but that's not what they ask about there
do you know what they mean by "consistent"?
the span of v1 and v2 is just a 3 x 2 matrix
no
the span of v1 and v2 is all vectors w such that w = av1 + bv2, for any a and b
so taking what you said, the span is all vectors that come out from multiplying that 3x2 matrix with any vector [a;b]
might wanna double check ur answer for a too
how come? if the null space has only the 0 vector in it, the columns are linearly independent
should be rank 3
care to explain?
oo there is an extra condition
ur right then
it is
a and c are both "always" given the conditions in the problem
b should also be always
ty

for my 3x3
I have [0, 1, -2] for my first column
how do I figure out the other two columns such that the matrix A has only 1 solution
you can't
because for their to be only one vector [0 1 -2] in the solution set
it means the RREF matrix has only 1 solution
that's wrong
the other two columns will have free variables
this will have infinitely many solutions
it's telling you the column space of A is spanned by a single vector
so it's just a line, instead of all of R3
any b such that Ax = b will be multiples of this vector you were given
its asking for a 3x3 matrix not a multiple of the [0 1 -2] vector?
it's asking for a 3x3 matrix such that, no matter what x you multiply, the result is a multiple of that vector
how do i come up with the matrix then
start from the rref form and work backwards, i guess

do you know what an eigenvalue decomposition is?
bro what
we havent even learned that stuff lol
im just gonna ask my teacher later today np thanks anyway
anyway. the easiest way would be to have a matrix A where all columns are identical
like [0, -1, 2; 0,-1,-2; 0,-1,-2]?
mhm
this is the same
instead of Col A
oh wait
nvm
this is Null A
so my 3x3 matrix * [1 0 1] = 0
right?
mhm
maybe
[-1,1,1; -1,1,1; -1,1,1]
because when i multiply the -1 and 1 by the given vector
they become -1 + 1 = 0
and the middle 1 is irrelevant because its multiplied by 0 anyway
this is wrong because the basis would have 2 vectors
you also don't get the 0 vector
,w {{-1,1,1},{-1,1,1},{-1,1,1}}*{{1},{0},{1}}

you do get the zero vec, nvm, i was reading those as columns
eyyy
but anyway this is wrong

you need to have 2 linearly independent columns

{kind=link}
{kind=link}
{kind=link}
{kind=link}