#linear-algebra
2 messages · Page 177 of 1

all rotation matrices in 2 dimensions end up looking like this
where theta is your angle of (counterclockwise) rotation
#linear-algebra message. I don;t think rederive is involved
yeah but my point is i dont know whether you've been shown that rotation matrix in class before
Okay idk if i'm thinking way too hard about it but given this definition and this thm


im asked to prove that for real or complex matrices,

I just don't know where to begin
||AB|| is the smallest constant satisfying (...), right? so what if you could show that ||A||||B|| also satisfies (...)? would that finish the proof?
what's a good and easy way to get an overestimate of a matrix's largest singular value?
i'm thinking of applications with gradient descent, so hopefully the overestimate is not too large

test the definition of a subspace
@lavish jewel I'm kinda confused there
well, what's the definition of a subspace?
As far I know you it's like if it satisfies these 3 conditions
-
non-empty (or equivalently, containing the zero vector)
-
closure under addition
-
closure under scalar multiplication
Yup so now test if it's closed.
Imagine some situations to see if you can or can't break closure
So the first and 3rd condition aren't satisfying
yup
I prefer to think of subspace as a subset of a vector space which is still a vector space under the same operations as the parent space
That way I don't have details like "it's not empty"
well, you still have this detail implicitly
in the sense that it's implied by the existence of an additive identity
the empty set still does not form a vector space
Can a brother/sister help a homie out with a proof?

do you know how to check whether something is a subspace?
We just defined it an hour ago
Non-empty, closure under addition, closure under scalar multiplication.
The big concern for me is quantifying it under the range of T
If U is a subspace of V, it implies all it's vectors are a subset of the vectors of V, right?
I'm having an issue with the notation
I need this in english.
lol
Yes U is a subset of V, specifically a subspace
I just don't understand what it means by range(T) and how to apply the subspace rules.
because if it was asking if TU was a subspace of W
it would make more sense to me
range(T) is all the vectors in W "reached" by T
So if you take a vector in V and throw it through T, you get something in W which is also in range(T)
range(T) is a subset of W, you want to show T[U] is a subspace of range(T)
which to me sounds like, if you throw anything in U through T, you'd get something that has to be in W because everything in V went to W (after going through T).
right
but specifically you'll get stuff which makes up range(T)
which is a subset of W
$T[U] \subseteq range(T) \subseteq W$
moshill1

Oh shoot, can we do latex on here?
Yes
So just pick random vectors for U, like x1, x2, y1,y2 and then roll through the properties.
For a proof sake
You just go through subspace / naive test
0 is an element
linear combination of elements is an element

When I give the order all 4 of these equations are order 1 correct? Just clarifying
I think this is a #multivariable-calculus question
However, to answer your question briefly, no. I see two of these that are differential equations of order 2.

It seems like you went from cos(theta_x) + cos(theta_y) in one line to cos(theta_x + theta_y) in teh next
That was cos a cos b + sin a sin b = cos (a-b) if it's the line just after first expression in lambda squared.
No look at the linear term in your polynomial
Thanks. Just noticed it
However the subsequent steps I had corrected it
The expression for lambda has the proper coefficients
I am expecting the answer to be in simple terms.
Exactly pi/4 + (theta x+ theta y)/2 and -pi/4 + (theta x + theta y)/2
just a question, do you know one of the two eigen values ?
The image as expression for the Eigen values.
if so, you can straight up "hack" and use the trace
I'm not able to get that expression I have in the box to be in simple terms despite multiple tries.
After inserting the expression for lambda in it.
There's a square root of some expression in sines and cosines and it super complex to take out.
what I get for the determinant is $\lambda^2-2\lambda\cos(\theta)+1=0$

$(cosθ−λ)2+ sin2θ= 0$
Column 1 is theta x and column 2 is theta y.

oh sorry
@slim ice did you miss one of these ^
I didnt see
french keyboard on discord
I have to type it twice for it to appear
Visually speaking the transformation twists x component by theta x and y component by theta y.
Ok I get it. My expected answer is wrong.
Or is it right 😔
If theta x = theta y I will never get a Eigen vector.
Since all points will rotate by that angle.
During transformation.
If I note $t=\theta_x,,u=\theta_y$, I find $$\chi_T=\cos(t) \cos(u) -\cos(t)\lambda -\cos(u)\lambda + \lambda^2+ \sin(t)\sin(u)$$ where $\chi_T$ is the characteristic polynomial
I think there is one mistake in that calculation
You have two Sint sin u
It should have one sin t sin u and one cos t cos u.
the left term is cos

Writing latex too fast
Yeah. If you try to solve for lambda you get a fairly complex equation
I have written that in my image
you're expression is in fact not complex enough
Eigen value can become complex in certain scenarios.
here is what I find
and it makes more sense than yours because If I put $u=t$ or $\theta_x=\theta_y$ I find the standard rotation matrix eigen values with my formula
Not with yours
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)



If theta x and theta y are equal (and non multiples of n*pi) the Eigen vectors and Eigen value won't be real.
exactly
but working out the complex formula leads to the standard complex eigen values
because every rotation matrix is $\mathbb{C}$-diagonalisable with eigenvalues $$\lambda=e^{i\pm \theta}$$

there's one mistake
you have written a $\sin^2$ instead of a $\cos^2$, which lead to an incorrect factoring of $(\cos+\cos)^2$

the fact that you have a sum of cos squared
in your lambda expr
or thats just me after 3yrs not doing trig
I have 2 second degree polynomials: ax^2 + bx + c and a(x-h)^2 + k. Given that these are vector spaces, can I show that these two spaces are equal?
heh heh heh
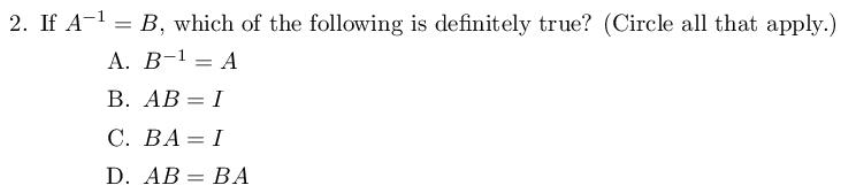
Isn't (A^-1)^-1)= A
yes
think so
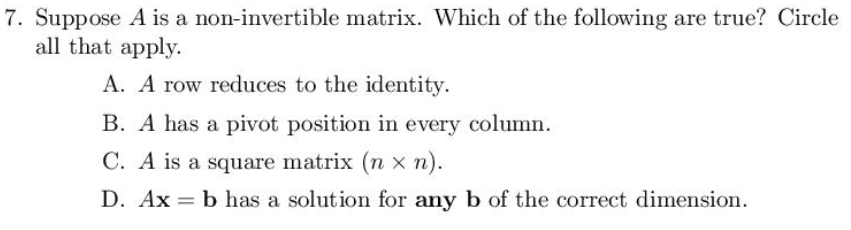
since a non-invertible matrix is one that doesnt have pivot in every row
A, B, are automatically not true
What about C and D?
How can I represent the set of 2x2 singular matrices?
i dont think theres canonical notation
you could do something like $\mathrm{M}{2\times 2}(\bR) \setminus \mathrm{GL}{2}(\bR)$ but
Namington

i feel like it'd be more clear just to say "let S_2 be the set of 2x2 singular matrices" or whatever
can you find an example of a non-invertible, non-square matrix?
hint: ||try literally any non-square matrix||
Ok. Because the question prompted to me was "Determin if the set of 2x2 singular matrices is a subspace"
I ended up going with all false
that's not true, A doesn't need to be invertible for that to be true
A=[1,0]
multiply this by x=[b;0]
yup
yeah that's basically how I think of it too, like projecting down to a smaller space
at least I find this perspective helps for thinking about how to invert rectangular matrices
definitely imo lol
man, I should learn a little linear algebra so that this channel makes sense to me
mood
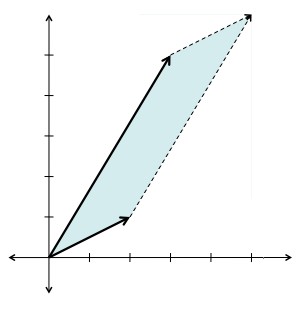
when finding the area of a parallelogram with determinants, can you use any two vertices? or are there specific ones you have to use?
the parallelogram has to be spanned by the vectors you choose
what do you mean by that
here let me draw a pic
ok thank you

the parallelogram in blue comes from a different choice of vertices than the parallelogram in red
the red line are supposed to show where the two overlap
actually wait
i see
ok but how would i know which ones to use for the blue
it comes from two consecutive sides, specifically the sides formed by vectors from the origin
so the blue one would be that middle long vector and the vector on the bottom right
the fact that they have the same area comes from det(a + b, b) = det(a,b) = det(a, b + a)
sorry, with labels


If you have a m x n coefficient matrix with more rows than columns, are the columns independent as long as there are at least n independent rows?

ok cool that's what I figured
Can a vector in a list/set which is linearly dependent be linearly dependent on multiple linearly independent vectors, or can a linearly dependent vector only ever be dependent on a single vector?
Well, I'll take that to mean that we don't really talk about being dependent on a vector, rather we talk about being dependent on sets of vectors?
define "dependent on a vector"
and clarify the "in a list/set" condition
"in the span of" maybe?
Uhm yes, do we not use the terminology "dependent on" in general? We might say sets of vectors are linearly dependent or independent, but not that they're dependent on eachother?
the terminology "dependent on" is not very standard, in my experience
okay, noted
linear dependence/independence is a property of a set of vectors
and not of a single vector (or a single vector relative to a set)
okay, that makes sense. I think I confused myself with the terminology I was using. Lin. dependence means some vector(s) in the set can be represented as linear combo of the others in the set, I'm clear on that
tyty
I feel like I'm messing up somewhere on J[t^2] but idk where

nvm doing the bounds wrong
actually no, still messing up, now J[t]
$J[t]=0.5\int_{-1}^1 3t+6st^2-15s^2t^3 \dd{s} = 0.5[3st+3s^2t^2-5s^3t^3]_{-1}^1$
moshill1

Main issue is I get t^3 in the final answer when J is suppose to be an operator on polynomials up to quadratics 
you're plugging in t when you should be plugging in s
also I recommend plugging in with f(t) = t^n and doing them all at one go
Im confused, do i plug in s^n or t^n, cause you said both
ah I didn't though
the formula says f(s)
you're putting f(t)
one is the variable of integration, the other isn't
it would be wrong if I said f(s)=t^n
"plugging in with f(t) = t^n"
that means plugging in f(t), which you said is wrong
you don't understand functions if you think that's wrong
wow so helpful
f(t)=t^n means when you plug in f(s) you put s^n
yeah ik that
well then why are you saying I'm wrong? lol
cause you literally said plug in s plug in t back to back
do you see what you did wrong or not
Yes, do you see how you worded it poorly or not
Not my fault you're insulting when you "help" 🙃
you're plugging in t when you should be plugging in s
how you messed up finding J[t]
also I recommend plugging in with f(t) = t^n and doing them all at one go
for finding the image of each vector in M under J

Soo I'm confused by this homomorphism
What would the marked function be equal to
Or more specific what would phi(blueBell) be equal to in the set N
I got this as well
why would phi(blueBell) = yellowGift
phi(blueBell)=phi(greenBell * greenBell)=phi(greenBell) * phi(greenBell)=blueGift * blueGift = yellowGift
Could anyone help?

ahh I see now, thanks
Boys. I have a quick question. I’m very stupid but wanna know if this is okay

Can I do that?
no
No?!
that too
Oops. My b
anyway, plug in h=1, you get sqrt(16-4)=sqrt(12) and that does not equal 4-2=2
sure, the x is multiplied by 0
i dont see why you substituted y and z tho, all you did was change their name
an element in that subspace is like (x,18z,z)

Why is determinant of a matrix defined the way it is? Is it just some random value mathematicians agreed upon as it showed up in tons of places and decided to give it a name or is there some deep universal reason for it's existence?
@wintry steppe : https://www.askamathematician.com/2013/05/q-why-are-determinants-defined-the-weird-way-they-are/
Physicist: This is a question that comes up a lot when you’re first studying linear algebra. The determinant has a lot of tremendously useful properties, but it’s a weird operation. Y…
Oh, I don't understand it but it seems like how the rule for multiplication of multi-digit numbers seem very weird and out of blue for a kid but they start to make sense as they learn more about the fundamentals.
Anyway, thanks for the help <3
This is interesting. It states that the determinant of a 3*3 matrix is the answer to the volume of a parallelpiped, created by vectors that are columns of the matrix. The next chapter of my calc 3 studies introduces the concept of the cross product and then the Triple Scalar Product, which is also the volume of a parallelpiped.
$|(\mb{u} \times \mb{v}) \cdot \mb{w}| = |\mb{u} \times \mb{v} ||\mb{w}||\cos\theta|$
yes
az

if you just stare at how the 3x3 determinant is calculated you'll see it's the scalar triple product in action i think

It must somehow be by definition
because that's the same parallelpiped constructed out of those 3 vectors
It's exciting when different branches of math converge
we can check X satisfies the vector space axioms, or if we already know C[0,1] is a vector space then we know X inherits its vector space structure and can just check X is nonempty & closed under linear combos
the constant 0 function is in X
If $f,g:\mathcal{C}[0,1]$ and $f(0)=g(0)=0$, and if $\alpha, \beta\in \mathbb{R}$, then $\alpha f(0) + \beta g(0) = 0$, so $\alpha f + \beta g\in X$
etc.
You don't need to write out the whole proof for them lol
it’s also wrong
kernel is a linear notion, since linear of zero is still zero
Apopheniac

still wrong
If you add and multiply 0 you get 0. what's wrong with that?
@solemn orbit Do you know what you'll have to prove to prove that a subset is a subspace?
@red prawn ||you are concluding that f and g are in X. That is not what you should be concluding. But don't fix it, let them do it themself||
why wouldn't you be able to conclude that f and g are in X, from what I have written? I left out that linear is continuous. that is implicit in the "etc." that i said after.
Bruh
they must already know C[0,1] is a vector space which i doubt
which is why i first suggested directly using vector space axioms
So, those are things that you have to show for axioms of a vector space. I didn't list all of them, just a couple
You have to prove IF f and g are in X, then af + bg is in X.
That's what I did.
Lol
you didn’t conclude af+bg in X
If $f,g:\mathcal{C}[0,1]$ and $f(0)=g(0)=0$, and if $\alpha, \beta\in \mathbb{R}$, then $\alpha f(0) + \beta g(0) = 0$, so $\alpha f + \beta g\in X$
Apopheniac

There.
What happened to "don't fix it, let them do it themself"?
and even if you do it right, it’s not YOUR hw

and you're not MY boss

this server isn’t where you do others’ hw for them
First off, it's important to clarify. Do you already know that C[0,1] is a vector space?
Yes, do you know that continuous functions form a vector space ?
You cannot use X being a subspace of C[0,1] if you do not already know that C[0,1] is a vector space.
There are other axioms you have to check to complete the problem. Ergo, I did not solve the problem entirely.
Etc.
I would suggest proving directly from the axioms that this is indeed a vector space.
wow almost like that was suggested already
I don't think you're understanding what I'm asking. Because you aren't really answering my question. What's your native language? Maybe there's someone who can actually speak it and help you better.
Because it satisfies the vector space axioms.
If you don't know that, then you can't use that.
So you have to prove all the axioms for X.
Try doing that, and tell me if you are stuck.
it just means the function has a root at x=0
It's all the continuous functions that also satisfy the condition f(0) = 0
So if you want to show something belongs to the set. You have to show it is continuous and it satisfies f(0) = 0
No
@solemn orbit
Check for closure
The problem is the extra conditions
Only some of those allow the sets to be closed under + and scalar multiplyint
take as an example f(x) = x + 1, g(x) = cos(x)
test if the second one up there is satisfied
g(0) = 1, no?
oh you wanna satisfy all 4 at the same time?
then what's the problem
i did say look at the second one up there
what's the definition of a vector space
there's no additive identity
no, i mean, that's the problem with case 2
there under the additive axioms you have 0+x = x+0 = x
case 2 doesn't seem to me to have a "0" element
because all the functions in the set have f(0) = 1
if you add any two of them together, you will get w(x) = f(x) + g(x), w(0) = 2
mhm
mhm
everything you said so far is true
this has nothing to do with the things oyu have said
mhm
look at the definition of your set lol
the 0 function is some h(x) = 0
for which h(0) = 0
it's not in the set
i have no idea what you're confused about, i'll leave this to someone else
sorry but i already explained it, you just don't know what a straight line is
You want to find a function in the set, O(x), such that O(x) + f(x) = f(x) for all f
In functions, the only function with that property is the zero function O(x) = 0, but the zero function does not satisfy the requirement of O(0)=1
so the 0 function isnt in the set thus there's no additive identity
we can also argue that if such O existed, (O+f)(0) != 1
since O(0)+f(0) = 1+1 = 2
yeah, ik
cause we only care about the interval [0,1]
because they literally told you it HAS to be f(0) = 1
yeah... the condition is still f(0)=1
idgaf about f(1/2) or f(-63)
as long as f is in C[0,1] and f(0) = 1, it's in X
condition
as a condition for all the functions in X
yeah but that has nothing to do with the problem
lol
a 0 element is a function that you add it to another one, and you get that other one
Ok let's assume for a second there is a 0 element for the set, ok
regardless of what it was
let's call the 0 element z(x)
I propose that z(x) + f(x) = f(x), with f and z being in the set
This means that f(0) and z(0)+f(0) should equal the same thing, namely 1
Computing both sides I get 2=1, which is not true, hence my assumption that z is the 0 element is wrong
Therefore no zero element exists
you don'T know what a vector space is, do you?
i explained it in 3 different ways, moshill1 recapped the approaches i took and now followed new ones
and you're not understanding us because you don't know what a vector space is to begin with
we can't do anything for you unless you know what the question is even asking you for
look at the axioms you yourself copy pasted here. is there anything about addition with scalars there?
I've noticed students in this channel have been having a habit of blaming the helpers for their own mistakes lately, weird
or the quality of students has gone down
let's just drop it here lol
Linear Algebra has become the worst channel
Oh god Ann's here
i just don't understand, it's not a 0 element bc it's not in the set right
@solemn orbit is g meant to be the function that returns the value 1 at x=0 and zero elsewhere?
jesus what a circus
maybe don't tell people to kill themselves, aza.
Slim maybe dont encourage it?
you can't have g(x) = 0 and also g(0) = 1
everyone stop spamming and let ann explain, since she's giving it a shot now. chill out
still waiting for an answer to this
is this what you want g to be?
this is self-contradictory as-is
okay so then it's what i said
then your function is not continuous
and so it's not in C[0,1]
then at a = 0 f(a) + g(a) = 2 =/= f(a)
the function g(x) = {1 if x=0; 0 otherwise} is not continuous, therefore not a member of C[0,1], therefore not a member of the set {f in C[0,1] | f(0)=1}, therefore why are we even talking about it?
alright seems like you've got this covered imma go
and why do we care about g(1) being 0?
this function is not the zero function no matter how much you wish for it to be.
f+g is not the same function as g.
you aren't adding an entire function with just one value from another.
you know, there's an even simpler way of explaining why {f in C[0,1] | f(0)=1} is not a subspace of C[0,1]
yes that's the zero element of C[0,1]. it's known as the zero function.
it's the function which returns 0 everywhere.
you are right about set #3 being a vector space, but you are wrong about the reason
haven't you been given the definition of a vector space?
there are two things to check here: closure under addition and closure under scaling
if you have two functions f and g, such that they're both in C^1[-1,1] and f'(0) = g'(0) = 0, will (f+g)'(0) be 0 too?
and if you have some scalar k, will (k*f)'(0) also be 0?
eh?
wait
... how familiar are you with calculus
i literally explained them to you for this particular example
the "demonstration" is trivial if you know a thing or two about calculus.
which... do you?
if you have two functions f and g, such that they're both in C^1[-1,1] and f'(0) = g'(0) = 0, will (f+g)'(0) be 0 too?
closure under addition means that if you add two elements of your set the sum is still in the set
closure under scaling means that if you multiply an element of your set by a real number the result is still in the set
you think so?
how come your answer isn't "of course, obviously"
can you please not use the R word
nothing to try... you just dont type a word
Let's move on.

aza, just out of curiosity, how old are you
I muted
and I'd rather you not ask questions about muted users since they dont really have a chance to respond
oh
okay never mind, they DMed me very rude things
i didnt see the role
so i banned
truly a great loss to society.
sorry about the shit show, that got out of hand quickly
didn't read all but from what I saw you tried hard, Edd
$A^T = -A$ is the definition of A being anti-symmetric right?
moshill1

The x not being there is messing me up
so is it y=18z+0*x
then I let: y=s and z=t
I know i'll have the vertical matrix [s, 18t , t],
but I got

what exactly confuses you
How is it [s,18t,t]
I wrote down 0 in place of s. and was confuised also on how we get t in the 3rd component
ooo I get it now

aight
this isnt quite linear algebra but its fine, lets study the ones digit of n!
1! = 1
2! = 2
3! = 6
4! = 24
5! = 120
and everything after that also has a ones digit of 0
(since it has a factor of 2 and 5)
so our possible ones digits for a! and for b! are 1, 2, 6, 4, 0
the remaining possible ones digits are determined by all possible differences there
for example, 5 is also possible, since if you subtract something with a ones digit of 6 from something with a ones digit of 1, you get a ones digit of 5
(in fact, this happens ONLY for 3! - 1!)
8 is possible, since 0 - 2 would produce 8
for example, 5! - 2! = 118
can you check the remaining possible digits? (the ones left are 3, 7, 9)
Oh i was just helping them in calc
I mean took me a minute to realize you can just set b=5 and then run through a values
forgot 2*5=10
quick linear algebra question, if the columns of $A$ are dependent, can a projection matrix $P$ still exist?
my intuition says if you throw away the redundant cols (to make $(A^TA)$ invertible) then you could use the standard projection formula.
but it woulden't work by default since $N(A) = N(A^TA) \implies n = N(A^TA)$ for $n > 0$ which means $A^TA$ is singular, right?
uli

I believe there is a condition of full column rank necessary to make $A^{T}A$ invertible but I don't remember
HisMajestytheSquid

Uh, hi there!
do you have a question or are you just saying hi in every channel lol
@cold ravine yeah there is, I'm just saying if you threw away the dependent columns coulden't you project after?
Im just introducing myself. After all, im new in this channel.
...so
I found a relevant stack exchange post that seems to suggest that's valid
However, I have certainly never dealt with it myself
ok cool
https://math.stackexchange.com/questions/3521372/does-a-projection-matrix-have-to-be-a-square-matrix

Mathematics Stack Exchange
Does a projection matrix have to be a square matrix?
I know that it's computed by a formula
$$P = A(A^TA)^{-1}A^T$$ where $A$ can be virtually of any dimensions. Does this formula guarantee that $P...
If you wanna looksee

technical writing can trip me up sometimes in math, could someone help me with this one? http://prntscr.com/1050t1k

basically it's asking you to show that, if you multiply everything in a basis by some square invertible matrix
the resulting products form a basis as well
then it's asking you to apply this if you multiply the standard basis vectors by the matrix
it might be better to think about the second question first
to get a concrete example
although not really necessary for the proof
@limber sierra i think this is easy, can you tell me what i should do

just see what happens to e1 and e2 by applying T
T as in transpose?
pi corresponds to 180 and -1,0
Ok so rotate e1 by pi, what do you get?
idk what is e1 tho
$\hat{i}$
moshill1

[1,0]^T
ohhh okay
$e_n$ is the nth canonical basis vector for $\mathbb{R}^n$
moshill1

ie 1 in the nth position, 0 else
is it cos(390)
how did your vector become a scalar?
i mean (2,0), (2,4)
-1,0
right, so reflect that in the x axis, what do you get?
the sign of what changes?
nvm. idk
if you were asked to reflect a point in the x-axis, do you know what happens?
@fervent gulch

you follow where the basis vectors land
think of a point like (2, 1) as telling you to multiply the first basis vector by 2, the second basis vector by 1 and add
https://youtu.be/kYB8IZa5AuE watch this video
Home page: https://www.3blue1brown.com/
Matrices can be thought of as transforming space, and understanding how this work is crucial for understanding many other ideas that follow in linear algebra.
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through Patreon, where supporters get early access as the se...
that's it?
oh sorry, i forgot the reflection
but if you get the idea its easy to continue it
just do the reflection and follow the basis vectors
can u show me, visuals help
sure, so we start here

(I'm calling $\hat i$ and $\hat j$ the basis vectors, but they just go in the matrix)
uli

then this is after a 180 degree rotation

then we reflect over the x-axis

so if you wanted to describe the vector $v = \begin{bmatrix}1 & 2\end{bmatrix}$ you would multiply $\begin{bmatrix}-1 & 0 \ 0 & 1\end{bmatrix}\begin{bmatrix}1 \ 2\end{bmatrix}$
uli

notice how matrix multiplication is defined, we take 1 of the first basis vector $\hat i$ and 2 of $\hat j$ j hat
uli

http://matrixmultiplication.xyz/ is how I visualize it
An interactive matrix multiplication calculator for educational purposes
also since A is a diagonal matrix you can just read it off as scaling the first element by -1 and the second element by 1
diagonal matrices scale each component in a vector when they multiply them
yea that makes sense
does x^2+2x+4=x+1 have one solution?
thats a cool visualization
no real solutions I think
look at the discriminant, see if it's 0 or not
also wrong channel, that's not linear algebra, try #prealg-and-algebra
no nonlinear equations allowed here
I was asked to find a basis for row and column space. I know how to do them but I'm wondering if my ref of this is correct:

A Kid Named Galois

<@&286206848099549185> help me plz
,w row reduce {{1, 2, 3, 1, 3}, {1, 3, 4, 3, 6}, {2, 2, 4, 3, 5}, {2, 1, 3, 2, 3}}

seems fine besides the extra column
just to make sure
,w row reduce {{1, 2, 3, 1, 3}, {0, 1, 1, 2, 3}, {0, 0, 0, 5, 5}, {0, 0, 0, 0, 0}

yep
its good
(again, except the extra column - not sure whether theres something in your technique im missing)
I do it for my calculator to accept it

I’m confused as to whether we use ref or rref?
doesnt matter
the real purpose of row reduction is just to identify & eliminate linearly dependent rows
row echelon form "guarantees" that they've all been eliminated
ie the remaining rows are linearly independent
Perfect. That was throwing me off. Thank you
in theory if you wanted
you could just keep track of the row swaps you did
and use the original rows instead of your reduced ones
ie for every nonzero "ending" row, take the "original" row (keeping track of swaps) as your basis vector
now theres not much reason to do this for rows
(you should do it for columns though)
my point is that it makes no difference "how much" youve reduced a row
That's what they make us do for columns lol literally my next question
hence REF and RREF are equally valid
yeah
the problem is that row operations MAY change the span of columns
they dont change rows, as i mentioned
but they do change columns
fortunately you can just use the original columns instead
(it might be worth convincing yourself why this makes sense; think about how the way pivot variables work guarantees they're linearly independent)
My next question gives you different answers for columns depending on if you use ref or rref. Let me post
it might
but both of the answers should work
ie be linearly independent and spanning
If the linear system Ax=0Ax=0 has at least one solution then Ax=bAx=b must have at least one solution.
is this statement true?
no, counterexample: let A be the matrix of all 0s, and b a nonzero vector.
thought so, thanks
The basis for the kernel of an invertible linear operator is just {0} right?
the kernel of an invertible operator is {0}; what is the basis for this space?
its not {0}
more precisely, the basis is empty
right
since 0=a*0 for all a
the basis is the null set
this might seem a bit counterintuitive since how do we write the 0 vector as... a sum of 0 elements?
but you can think of it as an "empty sum"
so to speak
But then the basis of image would be any basis of the vector space since Im(T)=vector space
huh
Im(T) = V since T is a linear operator and V is finite dimensional, so a basis of the image would be any basis of V
It'd be more clear to say the dim of basis of the image is equal to the dim of basis for the domain
imo it is also alluded to in the definition of linearity
Which maps coordinates in one space to coordinates in another
Yeah but if 2 vector spaces are equal, they can have the same basis
Yup, aka endomorphisms
Yeah that's what I was trying to phrase lol

A solution is unique when a matrix is full-rank
The rank is 3 so it can be expressed as the single solution x=(x_1 x_2 x_3)?
Oof we didn’t learn about full tank yet but I said something close to it lol

What have you tried?

Have you seen this type of problem?
Ls Lunch school
no this is new content our professor just showed us
@sonic osprey
like im convinced Im at the right spot
I just dont know where to go from here
td= today lunch and tm is tomorrow lunch
Ls lunch school lh lunch home
so if I have 100 students eating in the cafeteria today, what will the distribution be tomorrow?
34 what
34 students
34 students what
will be eating tomorrow
eating what tomorrow
eating their lunch from school tomorrow
and how many are bringing lunch from home
tomorrow
44
but the other 56 are eating lunch from home today
@sonic osprey sent u a dm
ik this is a mainly pure math server but is anyone here familiar with group theory or irreducible representations as applied to infrared spectroscopy? Im asking in here cause it uses linear alg to solve it
@wind yacht
zoph wtf

playing a deck building game or something idk
Could someone help me out with this? im lost

not really sure where to start with this, i know that it's vectors and i need to put them into a 2x2 matrix since it's R^2 but not sure where to go from there. any help is appreciated
well, the idea is that applying T to your vectors should be the same thing as multiplying them by your matrix (on the left)
so let's view this as solving a system:
\begin{align*}\begin{bmatrix}a&b\c&d\end{bmatrix}\begin{bmatrix}2\1\end{bmatrix} &= \begin{bmatrix}4\-5\end{bmatrix}\\begin{bmatrix}a&b\c&d\end{bmatrix}\begin{bmatrix}1\3\end{bmatrix} &= \begin{bmatrix}6\1\end{bmatrix}\end{align*}
Namington

yes that makes sense so far
alright, so now lets expand out those products:
\begin{align*}\begin{bmatrix}2a + b \ 2c + d\end{bmatrix} &= \begin{bmatrix}4\-5\end{bmatrix}\\begin{bmatrix}a + 3b\c + 3d\end{bmatrix} &= \begin{bmatrix}6\1\end{bmatrix}\end{align*}
oops
Namington

do you see how i got that?
and now we can simply view this as a system of linear equations:
\begin{align*}2a + b &= 4 \ 2c + d &= -5 \ a + 3b &= 6 \ c + 3d &= 1\end{align*}
Namington

now solve that system
a= 6/5
b= 8/5
c= -16/5
d= 7/5
?
yeah that's correct
so i just put this into the abcd matrix format?
yeah the matrix is $\begin{bmatrix}6/5&8/5\-16/5&7/5\end{bmatrix}$

you can check to make sure it works as well
to make sure you didnt make any arithmetic mistakes
,w {{6/5, 8/5}, {-16/5, 7/5}}{{2}, {1}}

,w {{6/5, 8/5}, {-16/5, 7/5}}{{1}, {3}}

Thank you so much!! @limber sierra you too @west orchid
yall are lifesavers! ive been stuck for so long
note that this isnt the most efficient method
it works, but there are other ways to tackle this
some are outlined here https://math.stackexchange.com/questions/313798/find-the-standard-matrix-for-a-linear-transformation
Mathematics Stack Exchange
If T: $\Bbb R$3→ $\Bbb R$3 is a linear transformation such that:
$$
T \Bigg (\begin{bmatrix}-2 \ 3 \ -4 \ \end{bmatrix} \Bigg) = \begin{bmatrix} 5\ 3 \ 14 \ \end{bmatrix}$$ $$T \Bigg (\begin{
the reason they work, though, is because this works
they're just "streamlined" versions of this process
Could anyone help? I guess I need an integral that is 1 for f(t) = 1 and 0 otherwise but can't find a function that this works for?


would you need the matrix to find this basis?
Let S and T be two spans of vectors where S and T are subspaces of R^3, what's the general method to find a basis for the intersection of S and T?

I'm not 100 % sure, I've got this so far but am thrown off by having it as an integral, I can find a dual basis for a functional with each element by inverting the matrix and then substituting in
@humble oak let's put it down formally; this applies to any such S and T spanned by finitely many vectors. let S=span{x_1,...,x_n} and T=span{y_1,...,y_m}. a vector x is in S cap T iff x is in S and x is in T iff there exist scalars c_1,...,c_n,d_1,...,d_m where x=c_1x_1+...+c_nx_n=d_1y_1+...+d_my_m. we can rewrite this as c_1x_1+...+c_nx_n-d_1y_1-...-d_my_m=0; we get a linear system and can find a basis of its solution set by usual methods, giving a basis of S cap T
ah i see okay, thanks
For question 5.5

Isn't this missing the assumption that AA^* is invertible?
Because otherwise how can you write the projection onto RanA^*
not really
use as an example Ax = y
then (A^HA)^-1 A^H y = x_rowspace
the row space is the range of A^H
oh, it says orthogonal projections, lemme check that again

it should be what you have at the bottom
you take x, move it onto the column space, and move it back to the row space
i mean
x row -> col is done by Ax
and x_rowspace = (A^H A)^-1 A^H y
if y is Ax, then x_rowspace = (A^H A)^-1 A^H A x
dumb q, if a* a is invertible, then the determinant is non-zero, so a a* should have same determinant and so be invertible? am i missing something?
but so how is this stuff relevant to the invertibility
cause im not really following
to what invertibility?
The invertibility of (AA^H)
it isn't
oh
i got that result without having to do that inverse
Ax is definitely in the column space of A, by definition
you can start like this
x = x_ns + x_rs
null space and row space components
ok
then Ax = Ax_ns + Ax_rs = 0 + Ax_rs
Oh I see the rest
Ax_rs is in the column space of A, so Ax = Ax_rs = y
Cause then A is left invertible
aight
much appreciated
Hey i got caught up with other hw but i finally got around back to this problem, so using the definition of the operator norm we know that
|Av|op <= |A|op|v| but like how would i introduce another operator norm B to help me with the inequality
but also doesn't this just simplify to the identity matrix
yeah because (A^H A)^-1 being invertible implies full column rank
that means A of size M x N has rank N, and so the null space contains only the 0 vector
x is projected onto the row space by the identity matrix
the row space is all of R^N
if A^H A were not invertible, then the projection matrix would not be an identity
and you would just SVD the hell out of this 😛
haven't learned svd yet
aight
all of these projection problems will become clearer and easier once you do
I was going over ref and rref. I don't understand why is matrix B in rref? doesn't it have to satisfy this condition?
"The leading entry in each row is the only non-zero entry in its column."

(please ping me)
Thank you!!!
it seems like a special case, since the second column can't be touched by any of the other rows
would this make the 2nd varible a free variable ?
"The leading entry in each row is the only non-zero entry in its column."
it does satisfy this
why do you think it doesnt?
these are the leading entries and their columns

think so
gonna be honest, my linalg is extremely spotty tho
and yes, the variable corresponding to the second column would be a free variable here.
this isnt a "special case" though
it matches the definition
oh this makes it much clearer, lol i got confused with rows and columns
yeah for some reason i read their thing as 'in its row' i think
idek
words are hard
i interchanged rows and columns
and got conufsed
thank you so much!! @limber sierra and @stable kindle
is this matrix in row echelon form?

This is kind of a noob question, but where might one run into trouble on the differences between cancelling and inverting?
it is, but it is not in RREF (reduced row echelon form)
what do you mean by this? multiplying by an inverse is the same as "cancelling" as long as youre careful about noncommutativity
Well I read that monomorphism is the same as left-cancelling, and that epimorphism is the same as right-cancelling, and that together you don't have isomorphism but bimorphism.
But then there's discussion suggesting that the distinction is really niche
I remember while working through the naturals that there was some effort to make nuance on the difference between inverting and cancelling
in the context of linear algebra at least, theres no difference
a linear map is injective iff it is surjective
and invertible iff it is bijective
Thank you!
Quick question: are all inner products on a space isomorphic to $\mathbb{R}^n$ equivalent?
Probably_Jason

$n < \infty$
Probably_Jason

lol, nevermind
let vectors u,v be a basis of R^2. If a linear transformation T: R^2 to R^3 sends both u and v to u, then T can NOT be onto.
is this true?
yes, a linear map is defined by its values on the basis of the domain
so if T(u) = u, T(v) = u, then T maps R^2 to a one dimensional subspace of R^3
@brisk fractal sorry i meant R^2 to R^2
same principle, it maps it to a one-dimensional subspace of R^2
so it's not surjective
thanks
Can someoen plz help

I really didn't understand the question
There seems to be 2 matrices?
One whose eigenvectors form the second?
For part c, am I wrong in just finding a re-arrangement of the canonical basis to find C? Cause I get the identity matrix if I do that and transpose isnt identity

Like am I suppose to link part 2 in somehow?
you want to diagonalize the matrix
so your basis should be of linearly independent eigenvectors
from either eigenvalue?
like a basis of 4 eigenvectors from +1, 4 from -1, 2 from each?
Also it might mean triangular matrix.. given diagonal operators is next week
you should probably be getting two eigenvectors from each eigenvalue in your basis. the space is 4-dimensional
i can think of two eigenvectors with eigenvalue 1 off the top of my head and im sure you found two for -1
sounds right
So I just pick 2 symmetric and 2 anti-symmetric so long as they're indep.?
then order them correctly
Ok
$L\left(A\right)\ =\ A^{T\ \ }from\ R^{\left(n\cdot n\right)\ }to\ R^{\left(n\cdot n\right)}$
TheRonaldReagan

How would you find the determinant of the linear transformation above? If you know, could you ping me?
Am I being blind or is there only 1 anti-symmetric 2x2..? everything else is just a multiple of it?
you're right, sorry
the space of skew symmetric matrices is 1 dimensional and symmetric matrices 3
my bad
anyways yeah pick out three linearly independent symmetric matrices and your favorite nonzero skew symmetric one and you have your diagonalizing basis

well if theyre noninvertible operators then they arent injective or surjective
but idk how to extend this to a subspace of L(V)
You have to take two of them and combine them linerly to find an invertible one
Yep
You can take two projectors
Two orthogonal projectors say
Ok i should let you do it ^^
Np :)

Subspace test is usually just:
0 is an element
linear combination of elements is an element
$L\left(A\right)\ =\ A^{T\ \ }from\ R^{\left(n\cdot n\right)\ }to\ R^{\left(n\cdot n\right)}$
How would you find the determinant of this linear transformation (ping me)?
TheRonaldReagan

so of cu+dv is an element c=d=0 implies 0 is an element
right
so technically you dont need to prove 0 is an element
yeah
doesn't it have to be non empty tho?

I was just kinda confused because it was Ax = mx
so basically just x + 2y = mx1 and 2x + 4y = mx2
would sastisfy a
?
Should be mx in rhs of 1 and my in rhs of 2
If you are going by that notation
For b,you just rearrange the equations you got in a)
It will be (1-m)x+2y=0 and 2x+(4-m)y=0
how would you approch part c?
You know
(2x+4y)-2(x+2y)=my-2mx
Implying m(y-2x)=0
Implying m=0 or y=2x ,now substitute back to get the solutions
oh okay
There will be a whole host of minor annoyances
- It is no longer true that a vector subspace is a vector space, unless you revise your definition of vector space as well. Assuming you do:
- What is the dimension of the empty set? Is it still true that the dimension of the direct sum of two vector spaces is the sum of the dimensions? The only reasonable way to do this would be to define the dimension of the empty set to be negative infinity
- Vector spaces are supposed to be the solution sets of systems of homogeneous linear equations. But every homogeneous system of linear equations has zero as a solution, so the empty set never occurs this way
- Linear maps are supposed to send 0 to 0. So you will have to revise this theorem to make some exceptions. The kernel of a linear map no longer makes sense in general, so you will have to make exceptions in definitions as well
Basically, it's inconvenient and unnatural lol
Another one is that not every vector space has a basis now
i guess it depends on whether empty sums and products count, bit it does say the operations are among elements of the set
the empty set doesnt satisty the def because it has no elements

@desert portal please wait 15min before pinging helpers
sorry
that's what i would say. since it explicitly says sums of elements in the set, it leaves out empty sums
that's kinda funny
because an empty sum is usually defined as 0, by convention
adding nothing at all should not affect the element it was added to
so if your set is empty and the empty sum is defined as 0, then the empty set is not a subspace because the sum isn'T closed
kinda lol. i'm just waving my hands at this point, but eh
maybe someone that actually knows math can comment more on it haha

there is of course no reason why it would have to be this particular definition of empty sum
so yea
that's a new one
proof by convention

for all u, v in V, u + v is in V
The empty set does satisfy this property, it's not a question of convention
The empty sum you are referring to is a sum of zero terms, but the vector space axiom is a sum of two terms
that's precisely what i meant
the definition is over elements of the set
i just added the empty sum for comic relief
the empty set is always a subset of a set, that'S not quite right
that's what you gave as part of your definition of a subspace
the sum is closed
I was replying to the earlier conversation about "i guess this could all be circumvented if empty sums and products are not counted like edd said
"
Maybe I need elaboration on this quote before I give an appropriate reply lol
right, so what i meant is that the definition is explicitly taking about two elements u and v chosen from a set V
Were you guys talking about the closure under addition property?
Yeah that is definitely satisfied by the empty set, and this has nothing to do with empty sums
i mean, that operation is not defined
it is accepted by convention that an empty sum yields the additive identitiy
if you go by that, sums of "nothing" are outside of the empty set
That is true but that convention is not relevant here
and so the empty set is not closed under sum
Because the vector space axiom refers to sums of two vectors, not sums of zero vectors
well, that's also what i meant when i said we aren't taking about empty sums because the definition mentions two elements explicitly 😛
The empty set satisfies closure under addition (of two terms) vacuously
Right
Yeah I would assume that they meant to include the third axiom and forgot to write it
Oh I don't know, I guess that depends on how much you like the book, how invested you are in it, and how confident you are about being able to spot other potential issues
It's really up to you, and all books have some errors I guess
Fixing mistakes is just an exercise for the reader 
we're comparing the binary sum operation with the trivial properties of the empty set
the definition stated a binary sum
it's aight
just keep an eye out for inconsistencies, then
it would require taking a subset of 2 elements out of the empty set first
idk, $\emptyset \times \emptyset \to \emptyset$ does work
Edd

but i guess any u and v are by definition not in the empty set?
i'll just go ahead and say i'm not a mathemagician, so feel free to disregard me and my lack of rigor haha
if you have a basis u1, ..., un of X and a basis v1, ..., vn of K^n, then you can map uk -> v_sigma(k) for any permutation sigma of (1, ..., n)
and then it's still a isomorphism
(also, idk if this counts, but can't you just scale the isomorphism to make another isomorphism?)

Commander Vimes

then iso is easy
ye, you just complete proof here
ok scalar won't give you nonunique
because if you map (x) to (x) then scalar maps (cx) to (cx) which is the same
but it won't work then for n>1
I meant a scalar multiple of the linear transformation itself
you can take arbitrary linear combinations of the basis as long as they (the combinations) are linearly independent

{kind=link}
{kind=link}
{kind=link}
Fix an iso f:X -> K^n. Then f determines a bijection between GL(n,K)=Aut(K^n) and Iso(X, K^n) given by u |-> u•f
So GL(n,K) measures the degree of non-uniqueness
u| is the ispmorphism between GL and Aut