#linear-algebra
2 messages · Page 176 of 1
{$e_1,e_2...e_n$} is orthonormal means
{$\phi_{e_1},\phi_{e_2}...\phi_{e_n}$} would be a basis of that space
DrunkenDrake

I don't think it would span (R^n)* at all
If the basis weren't orthonormal,This wouldn't be a "dot product"
A basis for which the inner product is a "dot product" is called orthonormal basis
idk just Intuition
How do you know there is not another x' Which satisfies this $\phi_{x}=\phi_{x'}$?
DrunkenDrake

how do i find a vector v thats in span(a1,a2) and span(b1,b2)?

Good cause you didnt give us much to go on with that question
and i gave the maliciously compliant answer
was it that vague?
ok mb
i got another question
if A and B are linearly dependent matrices does the product AB have to be linearly dependent as well
do you mean the matrices are linearly independent from each other or each one has linearly independent columns (i.e. full rank)?
I think they mean cA+dB = 0 for non zero c and/or d
then no
i mean the columns of each matrix are linearly dependent
then yes
yes
you can easily show it yourself by doing operations on the vectors
you can also read wikipedia

oh oops, i meant to circle the property below this one
thanks
im just confused about how rank and linear independence are connected
oh wait
rank = # of pivot columns?
nvm i got it
Hello again! A is a plane in R^3 with normalvector = n = (1, 5, 2). S = R^3 to R^3. Calculate reflectionmatrix S. Any tips on where to start? I've already googled for hours and checked my notes etc without luck..
a reflection matrix changes n to -n?
Yepp.
The way I was thinking was, if i find 3 orthogonal vectors to n, and find the reflection of those?
the plane is spanned by 2 orthogonal vectors v1 v2 on that plane. v1, v2 and n span all of R3
you can do the reflection by expression vectors in R3 in terms of v1, v2, and n, and swapping the sign of the n component
you can find 3 vectors, or as many of you want, that are orthogonal to n, but they all lie on a plane and are in a 2D subspace
there's no need to find more than 2
without thinking too hard about it, and probably with mistakes from my side, you're looking for a similarity transformation that looks kinda like this. if M = [v1 v2 n], you'll end up with MTM^-1, where T is probably something like diag{[1 1 -1]}
I see, and I have to be honest, that doesn't make much sense now but I'll look at it and maybe in a few minutes I'll understand. I'm really struggling to understand linear algebra, even though I'm having no difficulty with any calculus math.
surprisingly enough, linear algebra is more straightforward
Hehe, so they say..
But thanks, I'll keep on it. I'll probably come back with more questions :). Have a nice day!
is there a nice proof of scalar triproduct? v · (w × u) = w · (u × v) = u · (v × w) where v, w, u ∈ R3×1
you can write out how the result looks and compare them
if you wanna be fancier, you can write the cross products as matrix multiplications
I just write it as a determinant and see that these are just manifestations of determinant rules
since it's the volume of a parallelpiped, I guess there is a nice and intuitive geometric proof. Tho I'm very new to this stuff and haven't properly learned it yet.
proof, is proof
lol
no matter how cheating it is
well if you don't know what the determinant is, you'd have to at least at some point in your life see that you can manipulate the determinant in that way without it changing, that's all I really mean
thanks
i think i just calculate the corss producst open and get the desired result
on different problem i have troulbe on creating transformation matrix from set of values
i have polynomial space p4 with derivation as operation and i try to create fp->p transformation matrix
i have derived all functions on form a4X^4+a3x^3+a2x^2+a1x+a0 but im not sure how to get the transform matrix

ah
ffs.... the photos never come on correct direction
well, the easiest way is to see what happens to each of the basis vectors as you transform them
im stuck on that part
let's say we start with the vector [1,0,0,0,0], which corresponds to x^4, yeah?
that's one of the canonical basis vectors for 4th order polys
That should return 0 as there is no x^4?
no
it should return a vector isomorph to 4x^3
that's the derivative of x^4, and that's what your transformation matrix should do
i'll also teach you a trick of matrix multiplication before we go on
So 1,0,0,0 should return 0,4x^3,0,0?
if you have M = [m1 m2 m3], where m1, m2, m3 are column vectors
then the operation Mx yields x1m1 + x2m2 + x3m3
in other words, each element in the vector x is multiplied as a scalar to the corresponding column of M
also no, Tx, with x = [1,0,0,0,0]^T should return [0,4,0,0,0]^T
x = [coef of x^4, coef of x^3, ..., constant]^T
so basically 1,0,0,0 -> 0, 4x^3, 3x^2, 2x, a, 0?
1,0,0,0,0 but yeah
well
no
where did x^2 and x come from
what's the derivative of x^4
4x^3
if i have polynomial P4 isnt it same as A4X^4+a3x^3+a2x^2+a1x+a0?
yes but you already said you didn't understand how to work with that, so we are working with one basis vector ata time
just misunderstood this then
just look at one basis vector at a time, as i said at the beginning
[1,0,0,0,0]^T corresponds to x^4
yes, and when you derive it you get 4x^3
that sounds reasonable
and by that logic 0,1,0,0,0 -> 0,0,3,0,0?
if you have M = [m1 m2 m3], where m1, m2, m3 are column vectors
then the operation Mx yields x1m1 + x2m2 + x3m3
in other words, each element in the vector x is multiplied as a scalar to the corresponding column of M
yes
so do all of those, one at a time
0,0,1,0,0 -> 0,0,0,2,0
and finally 0,0,0,0,1
yes
ok
so this is the result of having done Mx for specific choices of x
this M is a transformation from R^5 to R^5, since we are inputting vectors with 5 elements and we are getting vectors with 5 elements out of it, yeah?
yes
ok
well, we left the 0 in front
since we lose x^4 on derivation
it's equivalent in the sense that the output is a subspace of R^5 where the first element is always 0
you can either make a 4 x 5 matrix or a 5 x 5 that will have an extra 0
5x5 is easier
that's what i thought as well, so let's go with that
now, let M = [m1 m2 m3 m4 m5]
it has those 5 columns
and if we multiply it by some x = [x1,x2,x3,x4,x5], we get x1m1 + x2m2+x3m3+...
the x_i are scalars, the m_i are vectors
so far so good?
yes
wait til we're done please
aight, so we know that if x = [1,0,0,0,0] we get that Mx = [0,4,0,0,0], yes?
it's what we did above
yes
but this also means that [0,4,0,0,0] = x1m1 + x2m2 + x3m3 + x4m4 + x5m5
so when we do this enough we should get

precisely
something that looks like htis
you see that the first row is 0s, so this matrix is rank defficient
which is the same as both of us said: i said it spits out a subspace of R5, you said it spits out polys of order 3
same thing
so this is my transformation matrix M?
yeah
test it out and convince yourself if you want
feed it random polys and compare with your own derivatives
oh well that was kinda easy now that you walked me trough how this works
now to do the easy part
if you can't see it clearly, go for inspection of the basis vectors
calculating eigenvalues
as someone else suggested up there
I'll be bback later with more problems i dont really understand chain theory but I'll finish this first
Let m = number of clubs, and let n = number of people in whole clubs.
- Assume in any club there's an odd number of people registered in that club.
2)In any 2 club, the sum of registered people from each club is even.
Prove that m <= n .
basically you have at least M students (number of clubs), so they can have more so you have to show that m<=m+1

the projection should be straightforward
you could do v3 = v1 x v2, find the coordinates of this vector x in that basis, and find the length of the vector v3 * its coefficient
(which still uses projections)
yeah I couldn't think of any way to calculate it without projections that would "simplify" the calculations so idk
cause projection isn't really that bad
wow i just noticed it's R4, no cross products, but gram schmidt instead, my bad
yes but gram schmidt is projection too, I think people understood you
I think it's hard to think of a non-projection way
yeah I mean calculus with partials isn't exactly simplifying
i was thinking maybe somehow decomposing v into a vector in the span of v1 and v2
and the complement of the span
but again thats not really simpler
yeah
well maybe something with like the kernel
of a matrix made of v1 and v2
that is also projection
rip
project onto the null space
same
i can't think of anything either
the book doesn't give any fancy solutions?
nah
no solutions other than this random guy who posted some partial ones for some questions
its Linear Algebra Done Wrong
chapter 5 section 3
pdf is online in case you’re curious
everything is happening at v1 = 1, maybe you can make a pretty 3D drawing
idk
idk what they mean by "simplify the calculations", it's literally 2 dot products

even drawing it in 3D is a projection onto lower dimensions
i feel like they must just mean partial derivatives
literally the only thing i can think of
hmmm
I got question, i got Γ = (V, E)

i need to find transformation matrix for laplace operator for Γ with ∆: F(V ) → F(V ), with base (χp1, χp2, . . . , χp8)
i must admit i have no idea what i'm looking at. let's see if someone else helps you out and i learn something by looking

Can someone help me with the motivation of $\mathrm{dim}({\vec{0}})=0$
Mr. Stewart

assume not
well actually I guess a better explanation id
Is
Every vector space has a zero vector by definition
Of a vector space
So let's take R^2 for example
the dimension of vector space which has a finite generating family is the cardinal of a basis
The empty set is a basis of the zero vector space
because the empty sum is zero
Hum that's not convincing
The empty set is trivially a linearly independant family
since there's nothing to check
and it's a generating set : since every vector space contains 0
(cont'd), the smallest sub-vector space containing the empty set is the zero vector space
i.e. the span of the empty set is the zero vector space
so the empty set is both linearly independant and generating : it's a basis
and it has cardinality 0
Can i potentially set up an appointment with someone to help me figure out where my lack of knowledge is for my linear algebra class? I have a homework assignment that ive been working on that has me questioning everything
it might be a little hard to find someone to give one-on-one tutoring here, i'm afraid; does your class have office hours you can attend? can you maybe book a session with your instructor/a TA?
its question about graph theory
In mathematics, graph theory is the study of graphs, which are mathematical structures used to model pairwise relations between objects. A graph in this context is made up of vertices (also called nodes or points) which are connected by edges (also called links or lines). A distinction is made between undirected graphs, where edges link two vert...
I'm going to attempt that aswell namington, i just am very lost and was just wondering if someone here would potentially be willing to help me later is all 🙂
Ok I asked this before but I dont fully understand still
If I have 2 linear operators S,T on finite dimensional V, then ST is invertible iff S and T are
Why does that break/not hold if V is infinite dimensional / what's an example?

But matrices arent linear operators?
or are those the matrices for the operators?
they represent linear operations in the vector space R^infty
which is R^n but inf?
can i get help with matrix algebra?
yes; intuitively you can think of it as the set of all real sequences
[im handwaving a bit here]
R^infty certainly has a basis
(1, 0, 0...), (0,1, 0, ...), (0, 0, 1, ...), ...
Yeah last time I asked someone (I think Terra) mentioned infinite sequences
uh
then wtf does "infinite dimensional" mean to you
these are not standard definitions
But im not seeing the jump from those matrices to operators / sequences
I think they might mean finite linear combinations? is R^infty supposed to have finite support here
you dont need finite support here
you can view those matrices as representative of linear functions
but if this layer isnt quite satisfying

Mathematics Stack Exchange
Suppose $\mathcal{H}$ is a Hilbert space and the product $T_1T_2 \in B(\mathcal{H})$ is invertible. Does this imply that both $T_1, T_2$ are invertible ? I am unable to prove this since, unlike the
(the proving-these-actually-represent-linear-maps is the part im handwaving away)
I think this is a hilbert basis here instead of a hamel basis?
oh i see your confusion mirza
you dont actually need that tighter notion of bases here
to map lienar operators to matrices
the map just isnt invertible but we can ignore those issues
Is a hilbert space just a vector space?
that said, we still have that hamel bases exist
by the axiom of choice
every vector space has a hamel basis
it just usually wont be constructible
in this case though, it will be constructible i believe?
wait no brain fart
it isnt
you need choice to show it exists
and so it isnt constructible
again though that isnt quite necessary in this case
to map between matrices and linear maps it suffices just to consider hilbert bases
as long as those matrices are infinitely large
(im hiding some details here, dont worry about them)
Ok I think I digested the stackexhange post
are matrix colums interchangeable?
what do you mean by that?
ie. i have colums lets say i have 3x3 matrix wiht colums W,V,U and i want to calculate det(w,v,u) is it same as det(u,w,v) or det(v,w,u9?
its not the same, no, but swapping columns affects the determinant in the same way swapping rows does
in particular, swapping two columns multiplies the determinant by -1
so det(w, v, u) = -det(v, w, u)
but also det(w, v, u) = -det(v, w, u) = -(-det(u, w, v)) = det(u, w, v)
i was thinking about this since i had to prove triscalar product
that it is commutative
and since V(UxW)

is essentially this
and from course book i know that

this is what i mean by interchangeable colums
swapping columns changes the sign of the determinant
but for triple scalar it is W(UxV)=V(WxU)=U(VxW)
note that these are always two column swaps away from one another

it is not; try #prealg-and-algebra or any of the ten #questions-_ channels instead
see the pins for a description of what linear algebra is.
I'm familiarizing myself with Invertible matrix and its theorem right now. In one of the problem of a true/false statement, it's asking " Let A be a 3x3 matrix, for some vector v b in R3, Ax =b has more than one solution. would Ax = b consistent for every b in R3?
My answer is that it would be false, since Ax =b in this case is not necessarily an invertible matrix ( because the problem stated some vectors not all?)
Is this proof written properly? It doesn’t need to be rigorous. Just wanna see if it’s correct

<@&286206848099549185> can someone help me plz ^
I'm not really sure what you're doing, I don't think its correct
I'm not sure what your first line even means? What are these two vectors?
I’m trying to generalize for this theorem


These are uh, pretty different situations. The second picture is talking about a specific example of a subspace.
I think my variables might be wrong but it’s how my professor writes the proof for condition 1 and 2
Oof
You should focus on the first picture more
Would it be correct if I replaced x with u and y with v? In the first part I’m showing u+v=0
why are you showing that?
Isn’t it the case that if it contains the zero vector then U is a subset of W?
Just look at

Oh W is the non-empty set
uh
yes?
The notation in your question is different though be careful
In your question U and V are subspaces of W
Oh so I’m my case the non-empty sets U and V of the vector space W is a sub space of W if it satisfied U+V is also in W
No
U is a subspace of W
V is a subspace of W
They're both nonempty subsets of W that satisfy the conditions to be a subspace
Ah so would I need to show that they contain the zero vector?

Ok that U+V is also in W
can anyone help me with lin alg? My dms are also open.... I got long questions
U + V doesn't make sense here. U and V are not vectors, they're subspaces of W
Oh I was thinking like showing U and V are subspaces of W then their intersection must also be a sub space of W
No that's what you're trying to show
You're given that U and V are subspaces of W
and you're trying to show that their intersection must also be a subspace of W
anyone?
How would I show that u+v exists in U⋂V? Intuitively I’m thinking u+v exists since U⋂V is the subset of all the vectors in U and V
what are u and v there?
Plz @fervent gulch this room is occupied
They are vectors in U⋂V?
Alright ping me when u done so Ik when I can go.
Okay now think about what you know about U and V
use the fact that U and V are subspaces
If U and V are subspaces of W then U⋂V is also a sub space of W since:
- u+v exists in U and V,
- cu is also in U and vice versa for V.
yes
Does that prove it?
yes
The last portion is correct right? @sonic osprey
yes
yass
Repost your question
I did
[1 0 0 -3] row 1
[0 1 0 4] row 2
[0 0 1 -3] row 3
Notice the bottom two rows cancel out. But idk if this is correct since the matrix isn’t square
what happened to the other matrix
they asked for an LU factorization, not a row reduction.
lowkey need some guidance here

U can say she/her
well, um am i supposed to like do one by one and see if all of them work or not?
or do i stop after one disproves it?
yeah well i dont know instantly lmao
this is the first problem like this i was given
so im trying to learn it
show all ok, sheesh thatll take a while
yeah i will fs
thanks
Y'all left me on read...
Anyone Ping me if ya know?
@fervent gulch notice w = u - 3v
okay but how does that go with T(w)
like do i do t(w)= t(u)-3t(v) @lavish jewel
precisely, since T is a linear transformation
alright i got it right. I can figure out most things but I just need lil guidance
I got a similar question to this
same as above
i'll get back to u in 10 mins if i got this right
i'll be sleeping so dont @ me haha
Ah I got it done
how do you simplifies when you evaluating a determinant inside | |
say |A x B X A^-1 |
can you move the A^-1 in front to simply it out to Identity Matrix, is it not restricted by the order?
$|AB|=|A||B|$
moshill1

please do not use the letter x, and especially capital X, for multiplication
does anyone know how to do #4?

write in set notation
show your steps

#4?
$$S = {A \in M(3 \times 2, \bR) : \text{condition goes here}}$$
(T*(Terra), -dτ)

okay
$$\begin{pmatrix} a & c \ b & d \ -a-b & -c-d \end{pmatrix}$$
(T*(Terra), -dτ)

it's a 3x2 matrix
and the elements in each column all sum to 0
i guess by "show your steps" they meant you're supposed to write out a matrix with entries like a, ..., f, and then show that it has to take on this form?
anyways, for the next part
verify subspace criteria
there is nothing more to it
hmm
okay well thanks, ill try my best
'

can i write it like that?
and say that a+c+e=0?
and b+d+f=0?
that's what it means for the entries in each column to sum to zero, yes
Like terra wrote above and then state your condition. One way would be just using indexing :
$$S = {A \in M(3 \times 2, \bR) : A_{ij}=0 , i\leq3 , j \leq 2}$$
rts

hmm
Or Well, i and j are not less than 1 and they are integers
huh
one way to start would be to write $$S = \left{ \begin{pmatrix} a & b \ c & d \ e & f \end{pmatrix} : a,\dots, f \in \bR : a+c+e=b+d+f=0 \right}$$
(T*(Terra), -dτ)

looks shitty
but you know e = -a-c and f = -b-d, yeah?
so you can "eliminate" e and f
Ah, my bad he wanted to sum all Columns
columbus 

sure
what does that help with tho?
well the thing i just wrote is perfectly fine "set notation" for S
but presumably you're supposed to simplify
"simplify"
okay, i mean its prolly better to simplify
ya
if you "eliminate" $e$ and $f$ from the previous "set notation" you should get something like $$S = \left{ \begin{pmatrix} a & b \ c & d \ -a-c & -b-d \end{pmatrix} : a,b,c,d\in\bR \right}$$
(T*(Terra), -dτ)

do i need to write that they add up to 0?
well they already do, dont they?
or is that already explained in the a+c-a-c
i'd think so


thats what i got rn
so thats the first part right?
now i have to fine the subspace of V=M3x2(R)
right?
Ye, you can use your set notation to see if it is at least closed under standard addition or scalar, if it isnt then uh... idk.
meme answer: it's the kernel of a linear transfornmation M(3 x 2, R) -> R^2 so it's a subspace
hehe 🙂
namely, the linear transformation whose first, second components are the sums of the first, second column entries of the matrix, respectively
ight i finished
I wonder, why can't Gauss-Seidel method solve every system of linear equations? (like sometimes values would go to infinity)
well if you have zeros on the diagonal then you have a problem
But umm, the values given in the diagonal don't have any zero
The solutions are still getting larger, approaching infinity

is there any special reason you're using that specific method btw?
might be that they'll get sent to gulag if they don't use it
Just try for fun 😂
anyway, yeah, the coefficient matrix for this system is $$\begin{bmatrix} 1 & 2 & -3 \ 2 & -5 & 4 \ 5 & 4 & -1 \end{bmatrix}$$ which isn't diagonally dominant and doesn't look positive-semidefinite either
Ann

for a quick test of your method, you can multiply both sides of the equation by M^T (the matrix you have there)
that should be solvable with your alg if it's working correctly
you guys got a easy cheat to do 8x8 matrix determinant?
Block matrices or smt?
Gaussian can take up to a max of 28 steps if you are ok with that?

Yea,It depends on the kind of matrix
this is the matrix i got
Yea,This one's easy
i summed firstt for colums and got 1
not sure what im supposed to do with that result
ah nvm sum is 0
det should be 0
but im not sure how to "calculate" it
Sum the diagonal of the original matrix
that is the original, so i get 16
thanks
just read the final question instructions: "you may use calculation software or calculate eigenvalues and eigenspaces by hand, in either case show your reasoning"
im kinda curious what is the reasoning for i put values on eg. wolfram alpha and trust it count better than me
xD
what is below the y-1 and 3-z, do i need to divide everything by two or is it 1?
this is line
if I have a matrix A = [4 -1; 5 2] and it's asking for (the L looking things are capital I's as in igloo) 3I_2 - (3I_2)A
im not sure what is meant by I
above the question it also says: **In the rest of this exercise set and in those to follow, you should
assume that each matrix expression is defined. That is, the sizes of
the matrices (and vectors) involved "match" appropriately. **
maybe the I stands for identity matrix?
so I_2 is (1 0; 0 1)
does the notation O(n) for an orthogonal group mean that the matrix is orthonormal? or just orthogonal?
oh I see what u mean thanks

imagine the plane like a mirror
whatever point is on one side of the mirror reflects an equal distance to the other side of it
I'm not entirely sure how to do this, can't really find the explanation in the book
The book references an example solution where a transformation is the multiplication of a vector by a scalar, and the explanation of how this is a linear transformation
But that does not seem very similar to this problem
Do you have a definition of „linear transformation“?
It should be defined by saying that one or two equalities must hold.
Then try to verify these equations for the map T: ℝ³→ℝ³, (x1, x2, x3)↦(x1,x2,-x3).
Yeah, the two claims would be
T(u + v) = T(u) + T(v)T(cu) = cT(u)
I actually understand the answer to this question (how to prove it is linear), the only issue I have is that I don't understand whatthrough the plane x_3 = 0means
it is telling you up there what it does
it flips the third component of the vector
if x = (x1,x2,x3), T(x) = (x1,x2,-x3)
Oh man I feel so dumb lol
Thank you, sorry about that
can someone please help me with the inversions of permutations
i'm losing my mind over it because there are like two "definitions" and i dont know what is going on
first my notes say that (i, j) are an inversion if i < j and p(i) > p(j)
where p is some permutation
but then i saw in so many places that if (a b c d e f) is a permutation
the inversion is when some number is larger than a number thats more right
so what's going on here?
those are the same definition
how about (1234)
there are no inversions there.
wait a moment
hmm but thats not the same as if i > j and p(i) < p(j) right?
ok lets look at (2314)
is (2,1) an inversion here?
yes
2 occupies the 1 slot, and 1 occupies the 3 slot, so 1 < 3 but p(1) > p(3)
im assuming this is the second row of a permutation map and not cycle notation
ohhhhh okay that was my problem
i thought that this second rule is for cycles
i never saw a notation of just the second row
ah no
so i assumed that must be a cycle but now i think youre right
ok thank you so much i was losing my mind over that
cycle notation is a bit harder to see the inversions directly
yes because if it was a cycle notation (2,1) wouldnt be an inverse right?
because 2 isnt even smaller than 1?
well it wouldnt fit the strict definition
that would actually still be an inversion if we consider it as a two-row matrix:
(1 2)
(2 1)
but it wouldnt fit the definition laid out above
yeah (2314) and (1423) are the same cycle
and then it would be an inversion?
but they would have different numbers of inversions
er
other way around
$\begin{pmatrix}1&2\1&2\end{pmatrix}$ has no inversions but $\begin{pmatrix}1&2\2&1\end{pmatrix}$ has one inversion
Namington

so youre right that if you tried to apply this definition
to cycle notation
youd run into issues
since (1 2) and (2 1) would then have a different amount of inversions
but they represent the same permutation
yes you have to work with the strict definition when you have cycles
yeah, you want to convert to the two-row matrix representation first
ideally
(alternatively you could break it down into a product of 2-cycles)
yes ok thanks i get it now
what would be the easiest/quickest way of finding the 4th column of C^-1?

you can invert L pretty easily
inversion commutes with transpose, so once you have L^-1, you're pretty much set
also, since the matrix in the middle is diagonal, the 4th column will be the 4th column of L^T^-1 scaled by the sum of the elements of the 4th column of L^-1 scaled by 1/elements of the diagonal matrix
hello good people
maybe i ask why
a matrix A, that is 5x6, with rank 3
can not span R^3?
the cols of A
could you elaborate
if it's a 5x6, the dimensions are 5
and if it's rank 3
it has 3 pivots
so shouldn't it span R^3
5 entries
and 3 entries
but the cols of A
reside in a 3d subspace
so why doesn't it span R^3
my imagination isn't working
my brain clearly shows the cols of A spanning a 3d space in a 5d
because the columns literally don't lie in R^3. they span a 3 dimensional space, yes, but they don't lie in R^3
that three dimensional space need not be and will not be R^3
could you differentiate what it means to lie on a R^n?
is a member of
oh
OH
ok
bruh
tyvm
so just to get my understanding
it spans a 3d space, but it's not in a 3d space
yeah that sounds good
tyvm
the span will be a 3 dimensional subspace of R^5
Before we defined the determinant we defined multilinear transformations in the following way: F: U^n -> V is n-linear if all maps U -> V, u -> F(u_1, ..., u_n) are linear for all i ∈ {1, ..., n} and all vectors u_i ∈ U
The professor said that in order to do that we have to assume that 1 + 1 isn't 0 in the field that we're working with
my question is why is that condition necessary?
probably just so you don't have to deal with nonsense involving characteristic 2 fields
1 + 1 = 0 is bad
what is characteristic 2
i never heard of it before
it means a field in which 1 + 1 = 0 (a field is of characteristic p if p is the smallest positive integer for which 1 summed p times equals 0)
slightly better answer:
some aspects of the theory of bilinear forms (and by extension multilinear forms) become a little strange when you're working over a field in which 1 = -1, if i recall correctly
https://kconrad.math.uconn.edu/blurbs/linmultialg/bilinearform.pdf
this will probably elucidate that better than i can, see the table of contents first paragraph
e.g. any alternating (B(u, u) = 0 for all u) bilinear form is skew-symmetric (B(u, v) = -B(v, u) for all u, v). the converse is true outside of char 2 (because B(u,u) = -B(u,u), and since 1 is not equal to -1, B(u,u)=0), but false in char 2
oh okay thanks so much
we haven't yet covered bilinear forms so i'll wait until then for more understanding
but i think this thing with antisymmetry is the main thing
ya
because we have used that and apparently it doesnt work with char2

does anyone know how to smoothly write the inner product of a bra and ket in LaTeX?
like this

$\ip{x}{y}$
RokabeJintarou

physics package @wispy pewter
ah ok that looks good, how about the lineing up a row vector and column vector
bmatrix
EmilD

is there no way to line them up?
also dam that LaTeX command for the inner product didn't work in overleaf
import physics package
When you want to do multiple rotations all at once, do you add the rotation matrices or do you multiply them?
what do you mean by "at once"?
like rather than rotate by 90 and then again by 90 [by applying a rotation matrix twice], rotate by 180 [by applying a rotation matrix once]?
you would multiply, since linear transformation composition is the same thing as matrix multiplication
is there any geometrical intuition for why Ax(BxC) = B(A.C) - C(A.B)?
like for the scalar triple product being cyclic it's like any way you do it you get the volume of the parallelepiped which is quite nice

$$\begin{bmatrix}x\y\z\end{bmatrix}=xe_1+ye_2+ze_3.$$ use linearity.
(T*(Terra), -dτ)

(presumably "transformation" here means "linear transformation")
Hold on
so how do i obtain that and I can resize the matrix
i don't understand
I want to get t ( x y z) , I'll do the calculations but I do need guidance
$$T\left(\begin{bmatrix}x\y\z\end{bmatrix}\right)=T(xe_1+ye_2+ze_3).$$ apply linearity and simplify
(T*(Terra), -dτ)

I obtained -22, 17
My bad I realized what when wrong
Ok I got it right, now next question

does anyone know the command to have wolfram alpha compute an innerproduct of a row vector and a column vector?
basically solve Au=b, so either gauss jordan or find the inverse of A if A is invertible
hold on i'll let u know if i got it wrong

I got this for gauss jordan
yeah, did you do it w/ the augmented matrix?
eh i haven't only inserted a for gauss jordan
Ok so either solve the augmented matrix or find the inverse
this is inverse of a

Ok.. so solve Au=b
wait but I don't have u
Yes but you found A^-1
how do i use the inverse to lead me there
left multiply both sides by A^-1
mulitply b by A^-1?

both sides of what moshill1
Au=b...
Maybe visuals would help, I am getting there
$A^{-1}Au=A^{-1}b \to u = A^{-1}b$
moshill1

for A^-1 times b

im guessing you're just getting a program to do the calculation for you from the screenshots, but sure
y so salty? I am getting the easy things done manually by hand, i would do so if I had time to spare this evening
He/She/They left the groupchat, anyone willing to guide me
<@&286206848099549185>
I am not sure I feel like i prob left out something
The previous person said to multiply by both sides I only did invertible A times b
I am not sure how to do the rest that all
I feel like i did a portion but I want to make sure, u said that" computing A^{-1} b gives you u" so I thought u meant I was done
I did read it but I only understand partially
so like after i did the A^{-1} b gives you u, what do i gotta do next. did i get the complete answer or was there more required.
nvm I got it wrong.
yea no worries
anyone have an example of a LA proof that uses the contrapositive?
proof by contradiction?
i mean just a theorem or fact in linear algebra that has a proof by contrapositive
what's a contrapositive?
off the top of my head, vandermonde matrices are shown to be full rank by contradiction, if that's what you mean
$(P\implies Q )\iff (\neg Q \implies \neg P)$
nix

Havent learned formal logic yet lol
or wherever those types of statements show up
P=the matrix M is invertible
Q=zero is not an eigenvalue of M
If the matrix M is invertible, then zero is not an eigenvalue of M
is equivalent to
If zero is an eigenvalue of M, then the matrix M is not invertible
for example

that looks like a proof by contradiction
i was just giving an example of what the contrapositive is
u busy?
my bad, contrapositive is a more special case
Probably getting more into proof/logic, but what's the distinction b/w contradiction and contrapositive then?
Proving contradiction is conditional and contrapositive is biconditional?
in a contradiction, assuming p leads to q and not q at the same time
contradiction is start with the opposite of P and show an obvious false-ness?
sounds like Modus Tollens
if p then q and you can show that q implies w and not w, then not q and therefore not p
ins't modus tollens contraposition?
$P\implies Q$
$\neg Q$
$\therefore \neg P$
nix

personally not quite seeing the contraposition. i thought this was like contradiction because you usually do those by assuming Q is false
oh, you mean to show that not q then not p, not just not q
in what you wrote one has to show q is false, not assume it
you start with knwledge that if p then q
you show that not q, therefore not p
in contradictions you show that if p then q and not q, which doesn't make sense

modus tollens is the law of contrapositive
but still this is all tangent to what you asked, sorry. i can't think of any examples at 3 am lol
tfw im an idiot 
anyway yeah
do you mean to prove p then q by showing that not q then not p?
or to start with knowledge that p then q, and show that not q therefore not p?
the vandermonde matrix example i gave starts with the assumption that the columns (for a certain vandermonde mat m x n) are lin dep, which means they have a nontrivial linear comb that gives a 0 vector
you show that the latter is false, amd therefore so is the former. this uses a contradiction as well tho
someone will give you a better example and correct my mistakes while i sleep

Can I check for this slide, after reducing the matrix A, I got :
A=[
1 0
0 1
0 0 ]
There is a zero row. That means it does not have a solution for every vector b, right?
But the span/column space of A is a 2D plane since we only have 2 Linearly Independent column.
the columns of A can't span all of R^3 since there are only two of them
so yes, you are right, there will be some b for which Ax = b has no solution
you're also right that the span is a two dimensional plane, since the columns are linearly independent
everything you've said checks out 👍
Thank you @wintry steppe !

Matlab or some other program,ig
Assuming you mean solving a system of linear equations in more than 4 variables by "solve"
it's not really any harder
just more tedious/time-consuming
(and more opportunities to make mistakes)
\textbf{Problem. }Let $V$ be a vector space having dimension $n$, and let $S$ be a subset of $V$ that generates $V$. Prove that there is a subset of $S$ that is a basis for $V$.\begin{proof}If $V$ is the zero vector space, then $S=\emptyset$ is the only possible spanning set, and $\emptyset$ is a basis for $V$, thus proving the claim. Consider now that $V$ is not the zero vector space. Suppose to the contrary that no subset of $S$ forms a basis for $V$, that is, any linearly independent subset of $S$ has at-most $n-1$ vectors(a linearly independent subset of $V$ can't have more than $n$ vectors by the replacement theorem). Call this linearly independent subset $A$. Now, all the vectors in $S\setminus A$ can be represented as a linear combination of vectors in $A$, which means $\text{span} (A)=\text{span} (S)=V$. Thus, $A$ is a linearly independent spanning set of $V$, and is therefore a basis by definition. But $A$ has at-most $n-1$ vectors, which contradicts the fact that $V$ is $n$-dimensional. Hence, $A$ must have $n$ vectors as well. This proves the claim.\end{proof}
Ted

Does this proof feel shaky?
The bit about A having n vectors...doesn't sound right. I think I'm either missing something, or adding some redundancy.
But I already ruled out A having more than n vectors by the replacement theorem
Then, It's fine

Is contradiction redundant in the above proof? 
Can I not just take the largest possible linearly independent subset, claim that it spans the space, but can't have more than/less than n vectors due to replacement theorem and its corollaries?
how do you know it spans the space?
Same reasoning as above
a better approach would be to take the minimum subset which spans the space and conclude it is a basis
Any linear combination in terms of vectors of S can be reduced to a linear combination of vectors of this largest linearly independent subset
How do you formalise this idea for a proof?
perhaps u just remove 1 vector at a time
Yeah, but it doesn't mean S has to be finite
You could keep picking out vectors forever
ic
start with zero add vectors as long as the new gen set is LI
Hmmm, okay
but u could also choose the wrong vectors forever
¯\_(ツ)_/¯
I'm more insistent on the contradiction approach for this reason
I still don't usually get the "choose one vector, choose another..." approach.
it's just that i remembered axler had a proof with removing vectors until it was the minimal span
i shall perhaps look it up
Thanks!
ah
Axler's proof is for finite lists which are still spanning
Ah
Axler's approach is to prove that every finite-dimensional vector space by definition has a spanning list that is also finite
So that's just saying every finite dimensional vector space has a finite basis
I don't think that helps with this problem, does it?
but once you prove the existence of such a list
you can start subtracting in a finite way
You can bluntly define a finite-dimensional vector space as implying the existence of such a set
I see. For now I'm just going with the idea of picking the biggest possible linearly independent subset of S and then proving that it is indeed a basis; I'll try your approch as well. Thanks!
can somebody explain how did they get the det A^-1=19?

In a homogenous equation where mxn matrix,m>n
Is it right to say we can state these points:
there could be infinitely many solutions or no solution
But there can never be just 1 solution?
No. It has 1 solution or infinitely many solutions. 0 is always a solution, so it must have at least one.
but there could be no solution since there is a zero row
What do you mean by a homogenous equation? Ax = 0?
yes
A(0) = 0 is always true. It doesn't matter what A is.
So x = 0 is always a solution
okay so at least 1 solution
But how does infinite solution come about?
If A is not invertible
Is there a way to get from the base (2,1,1), (-1, 1, 0), (-1, 0, 1) to the base (1,1,1), (-1, 1, 0), (-1, 0, 1) without zeroing (2, 1, 1)?
Basically turn (2,1,1) to (1,1,1)
what exactly do you wanna do
thanks, so it either has only the trivial solution or infinitely many solutions (in addition to trivial solution)
Yes @pseudo thicket
thank you
Np
I'm trying to create a sample question to get the infintiely many solutions, how should I craft them?
Create a matrix with zero determinant
Then it won't be invertible
Easiest answer: the zero matrix.
I made a mistake in the test, I was asked to orthonormalize the eigenvectors of some matrix
after fixing a mistake in one area I didn't fix it in another and got the base with (2, 1, 1) instead of (1, 1, 1) - rest of the vectors were accurate/correct.
I was wondering if I can argue that (1, 1, 1) is a combination of (2, 1, 1) and the rest of the base and thus I still deserve some points despite the last vector being "wrong"

nice, so it is one
ofc, both of the matrices are full rank transformation matrices
why the reverse though?
my guess is you will get no credit, though, because finding a basis is easy. they specifically asked you for an orthogonal basis
I got an orthonormal basis, but with the wrong 3rd vector
the rest of it was correct
yours isn't orthogonal, and even less orthonormal
I know, ok:
I had a matrix A
I was asked to find an orthonormal basis for eigenvectors of A^TA
I found eigenvalues(correct)
I found eigenvectors(2 correct, 1 incorrect) <- my question here
I did gram schmidt on the 3 vectors I found
I normalized all the vectors
in the end I had 2 normalized vectors and 1 incorrect vector
if you did gram schmidt correctly, the result will be a set of 3 orthonormal vectors
Yeah, but they are not the eigenvectors of A^TA
I also think I did a mistake in gram schmidt at v3
though I still didn't figure out what it is
that is more likely
I still didn't get the results, I just realized I made a mistake halfway with the vectors and was wondering if I can argue that the step is (technically) correct since I still had an eigenvector
in case I lose points
yeah.
the matrix is full rank, so your argument won't hold. you can do what i did up there for any vector in R3
you'll get credit for those 3 vectors and for trying G-S, most likely, but that's about it
well (2, 1, 1) is linearly independent
so it's not just any vector
also at the end, end result
two out of three vectors are correct
Since I used (2, 1, 1) as v_3
only the last vector is not an orthonormalized eigenvector
they'll probably notice that
For tensor products, does $$(A \otimes B)(A' \otimes B')=AA' \otimes BB'$$ where A,A',B,B' are matrices?
init0

yes
proof?
you can expand the product block by block and check
kronecker products have a block structure
@lavish jewel
If Av = xv
then isn't it true
3Av = 3xv => A3v = 3xv => 3x is an eigenvalue as well as x?
for any number really?
except 0
what you wrote is correct, but the conclusion is wrong
isn't 3v it an eigenvector of 3x?
if 3x is an eigenvalue, then the corresponding vector is scaled by 3x
Ok, but by definition can't we say x' = 3x is an eigenvalue because there exists Av' = x'v?
with v' = 3v
look at your equation
that's not the definition of an eigenvector
it's not the same vector on the other side
Right, it's two different vectors with two different values
but aren't they both eigenvectors and eigenvalues, albeit differently? or am I misunderstanding something
you are misunderstanding something indeed
Av = xv for non-zero vectors, means that x is an eigenvalue and v is an eigenvector
A3v = 3xv where x' = 3x and v' = 3v means that x' is an eigenvalue and 3v is an eigenvector because Av'=x'v
that's wrong
hmm
hold on, wouldnt there be only inifinitely many solutions?
since there are free variables!
w is an eigenvector of u eigenvalue
no
because you got z on the other side, not w
what the fuck
it has to be the SAME vector on both sides
SAME
okay, don't get angry with me! 😦
I see what you mean now
A3v = 3xv => A3v = x3v
so x is an eigenvalue of 3v?
now we don't have infinitely many eigenvalues, just vectors I guess
right
that's why one usually normalizes the eigenvector
any vector parallel that direction will get scaled by the corresponding eigenvalue
so only the direction is important
right, which is why (2, 1, 1) is a bad answer nonetheless S:
even though it is a combination of other eigenvectors
yep
sucks
hopefully they won't notice, the answer is 2 pages long and the result is still orthonormalized vectors lol
at least partial points
it's a 20 point question 😦
you'll get at least partial credit
hopefully
a merciful teacher would check separately that you did G-S correctly with the vectors you picked, so you'd get most of the credit
I checked it with a calculator and didn't find any issues, but the result of G-S in an online calculator seem different
actually I should just try to inner product them and see
in a matrix where m<n, where the equation is homogenous, then there will be inifinitely many solutions only, right?
yep
if a complex matrix is invertible, is it also unitary?
No
unitary is like the complex version of an orthogonal matrix
it has determinant |z|=1
okay, asking one more time, is there any geometrical intuition for why Ax(BxC) = B(A.C) - C(A.B)?
like for the scalar triple product being cyclic it's like any way you do it you get the volume of the parallelepiped which is quite nice
I don't think cross products work nicely
hmm well the vector BxC is perpendicular to B and C, so when you cross A with BxC you get something that lies in the plane spanned by B and C, so you can look at the projection of A on B and C with those dot products I guess
I'd have to think a bit more about why it has that exact form but at least that seems reasonable enough intuition for why you end up with the dot products A.C and A.B at least
Edd, I managed to figure out the math of you are intrested
hmmm
what math
The one I asked few days ago about the net
And you said you dont know howbto do it
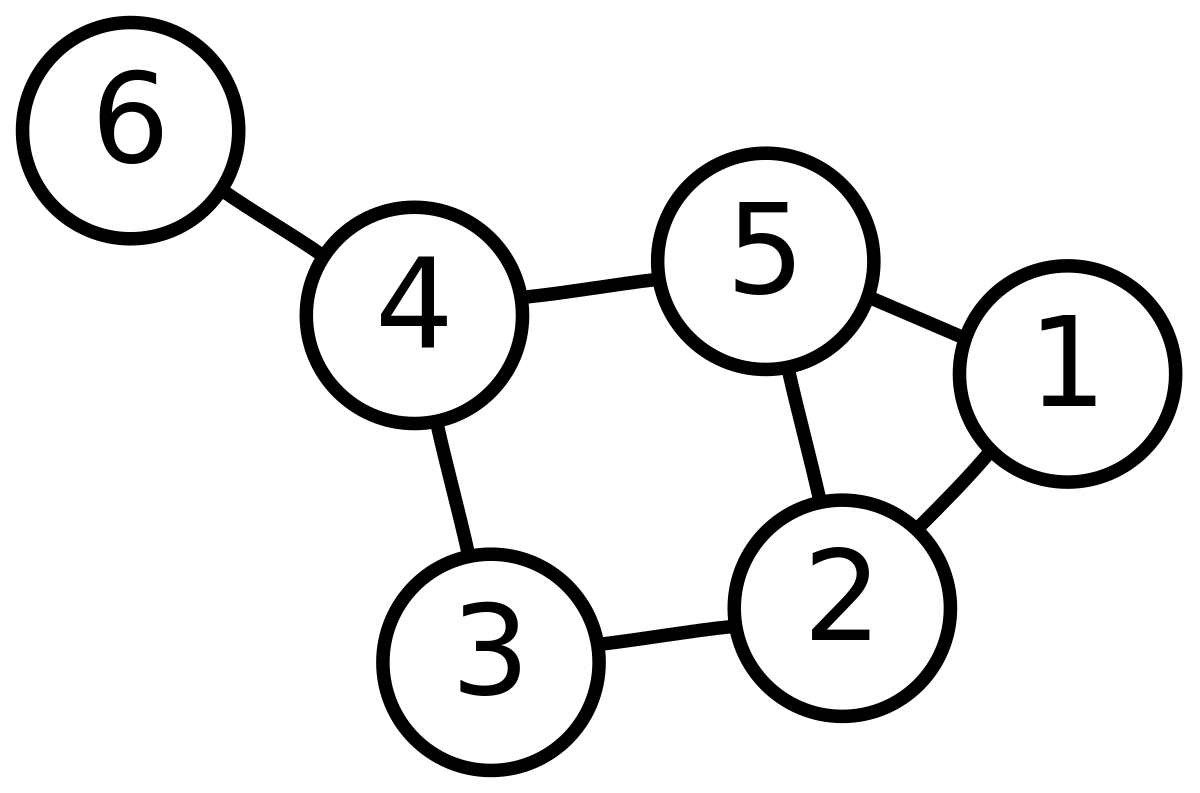
With the funny circle imagine and needed to make matrix out of it
oh
yeah after you said it was a graph i realized
the graph laplacian is a difference matrix

But it took quite long
it's a big matrix even for only a few nodes, yeah

if you rotate [1,0] by 4/3 pi, what does it become?

where does a rotation of 4pi/3 land on the unit circle?
it's shown somewhere in that image
(-1/2, -sqrt3/2)
right (assuming the rotation is counterclockwise)
Ok so how do i proceed w/ that
well we know $\begin{pmatrix}a&b\c&d\end{pmatrix}\begin{pmatrix}1\0\end{pmatrix} = \begin{pmatrix}-1/2\-\sqrt{3}/2\end{pmatrix}$
Namington
