#linear-algebra
2 messages · Page 172 of 1
formally speaking, in gaussian elimination, you can only do one step at a time
but for notational reasons we often "combine" steps
when we write them down
since it saves time/space on a page
when in doubt, however, i'd recommend writing them separately.
cool thanks
yeah i was just tryna save time/space but i guess its safer to just do one step at a time
I'm trying to figure out this proof, and where to start really. I'm wondering if I can consider a 1x1 matrix as a scalar as well then just use induction?
Like, by the distributive properties of algebra its pretty easy to prove
But i'm not sure how to relate that to matrices and vectors
the vector has to have n columns
probably write out a general A, u and v, and go through it by hand, cause u+v can be treated as a nx1 matrix
So just do it by case
I wouldnt call it by cases tbh
I mean yeah I could just make a case, but how would I turn that into a proof
You're using a general A u and v
oh i get you
The row number probably
<@&286206848099549185> sorry for the ping but could anyone help me in lin alg, my dms are open too btw cause i will be having to go back n forth with u on the steps
So you should use matrix inversion to solve this
We can write the equation as AB = C
A is the first matrix as asked by question
B is the [0, 5; 1, -2] matrix
C is the [5, 5; -4, 23] matrix
*Since matrix division is not a thing, we need matrix inversion
Because matrices are not commutative, we have to choose left or right inverse
In this case we need B inverse on the right
So A = C*B^(-1)
Calculating that should solve the problem
@fervent gulch Do you still need help with this one
If that is too complex, you can set up an equation with undetermined coefficients
Let A = [a, b; c, d]
And solve with matrix multiplication and algebra
i solved it but i got another question, dm?
Sure
under which circumstances would a $2\times2$ matrix $A$ not be similar to the matrix
$B=\begin{bmatrix}0&1\-\det(A)&\operatorname{tr}(A)\end{bmatrix}$
nix
i can think of the identity and zero matrix but not any others
and in general would those two types of matrices be the only ones not similar to some $n\times n$ matrix of the form
$B=\begin{bmatrix}0&I_{n-1}\**&*\end{bmatrix}$
nix
i think if the characteristic polynomial was $p(t)=t^n+a_1t^{n-1}+\ldots+a_n$ it would be
$B=\begin{bmatrix}
0&1&0&\cdots&0&0\
0&0&1&\cdots&0&0\
\vdots&\vdots&\vdots&\ddots&\vdots&\vdots\
0&0&0&\cdots&0&1\
-a_n&-a_{n-1}&-a_{n-2}&\cdots&-a_2&-a_1
\end{bmatrix}$
nix
Can someone tell me what the replacement theorem actually states
Is it just saying we can take a linearly independent subset of a vector space and add vectors to it to get a subset that generates the whole vector space?
@faint lintel yes
i need advice on how you guys memorize
all these theorems
need some pointers
most of it seems redundant with just extra info
when you walk through them step by step and understand them well, many of them just stick
after seeing them once or twice
yeah theres only two permutations here
yes two
no, it's 2!
your matrix is 2 by 2
yes
anyway
3 * 1 - 2 * 4 is your det
the permutations are (1,2) and (2,1)
as in, well, "first column in first row and second in second raw" and the opposite
hence 3*1 and 2*4. And the latter is taken with a minus sign because that's that permutation's sign.
if we're considering a permutation like 1,2,6,4,3,5
that means we're multiplying $a^1_1 a^2_2 a^3_6 a^4_4 a^5_3 a^6_5$
ConfusedReptile
and for a 6x6 matrix, consider all 6! such permutations, with the right signs.
...and?
why would a 2x2 matrix be, after flattenting, 4x4?
this is 4,, though.
Yes, because you're doing it wrong. You don't permute the elements, you permute the rows, basically.
More precisely, you consider all ways to choose exactly one element from each row (and without choosing the same column twice)
that's N! ways for an NxN matrix, not (N^2)! like it would be for permutations of all elements.
Flattening the matrix is a bad idea, basically. You need that 2d structure.
I don't really get why you'd flatten it at all.
I don't get anything this text is talking about, can somebody help me understand it?
these are the equations for the 3 planes:
this is the graph of 2/3 of the planes (the 3rd plane is not included in the image)
I don't get the (n - 1) dimension (n dimension) stuff
<@&286206848099549185>
pls 😢
a usual plane is a 2D surface in 3D space
you could speak of a 3D hyperplane in 4D space
and so on
think of a point on a line, a line on a plane, a plane in a cube, ??? in ????
you do know, by the way, that real determinant-finding algorihms don't use the N! permutations, right?
fair enough
I'd just make an iterator over the N! permutations, then compute each product and sum them
of course, no idea how much more annoying that'd be in C - I don't think you use iterators much there.
I mentioned it above:
if we're considering a permutation like 1,2,6,4,3,5
that means we're multiplying $a^1_1 a^2_2 a^3_6 a^4_4 a^5_3 a^6_5$
ConfusedReptile
so you just need all the permutations of the numbers 1...N
If you want to make your own algorithm, one way is a recursive one: to get all n-permutations:
- Get all (n-1)-permutations
- For each such permutation, generate
nnew ones, by insertingninto each of thenpossible positions in the permutation.
For example, for 1,2,3. All permutations of 1,2 are [1,2], [2,1]. Insert 3 into 3 possible positions in each:
[1,2] -> [3,1,2], [1,3,2], [1,2,3]
[2,1] -> [3,2,1], [2,3,1], [2,1,3]
So you get 6 permutations of 1,2,3, as you should.
see above. You don't have any "permutations of matrices". You just consider all the ways you can assemble products of elements from the matrix such that you choose exactly one element from each row and each column.
I'd store the matrix as an array of pointers to arrays, yes, but it doesn't really matter. You can do it on a flattened array, too - just transform from the 2d (i,j) coordinates to the positions in the flattened array.
you're still not getting what we are permuting
really, it more like the indexes, pretty much
look at the formula.
We're considering, for an NxN matrix, all possible products of the form
$$
a^{\sigma(1)}_1 a^{\sigma(2)}_2 \dots a^{\sigma(N)}_N
$$
ConfusedReptile
where $\sigma$ is an artibrary permutation of $1, \dots, N$
ConfusedReptile
A sequence of N numbers (1 to N), each of them appearing exactly once, but in arbitrary order.
depends on the specific permutation
you need to consider all the N! of them.
two perms, (1,2) and (2,1)
the first one is when you take the first element of the first row and the second of the second
the second is when you take the second of the first row and the first of the second
well, yeah, it's a 2x2 matrix
no
the i element of the permutation says which element to take from the ith row.
Basically, for a matrix stored as a 2d array, it'd be something like:
fn det(mat: &[&[f64]]) -> f64 {
let mut res = 0.0;
let n = mat.len();
for perm in (0..n).permutations(n) {
res += (0..n)
.zip(perm.iter())
.map(|(i, j)| mat[i][*j])
.fold(1.0, |x, y| x * y);
}
res
}
(in Rust).
untested, mind.
@lavish jewel OHHHH THANK YOU SO MUCH
also how does this plane diagram have too many solutions
ohhh
nvm I got it
this is like a top view
If $V$ and $W$ are vectors spaces, can we talk about a linear transformation $T\colon V\to W$ only if $V$ and $W$ are defined over the same scalar fields?
Ted
no
How would a transformation work if they're defined over different scalar fields?
i'll give you an example
Like, T(cv)=cTv should make sense only if c belongs to the scalar field of both V and W, right?
T is a matrix with complex numbers, but V is defined over the reals
Hmmmmm
Tv is already in the space W, so c belongs to the field over which W is defined
(in this example, anyway)
Suppose V was defined over R, while W was defined over some finite field F. Now, c need not be in F; can we still define a transformation T from V to W?

Mathematics Stack Exchange
Why should linear transformation involve vector spaces over same field?
definition of a linear transformation:
Let $U$ and $V$ be $2$ vector spaces 'over the same field $K$'. So what happens if the
Looks like same fields are required.
it's not required, but the map may be linear over only 1 of the two fields
Although one can use subfields(a subfield of scalar field of W suffices for linear transformation to work).
otherwise, fourier transforms wouldn'T be a thing

anyway. you can specify that T is linear over the field of the input or the output, and that's also fine
T can be linear only in some cases
i have a doubt in linear algebra guys
if subspace is an vector in vector space W which is in V how the axioms identify it?
Huh?
i am confused just learning about subspaces so
oh thanks for that
I'm not sure what you mean by 'identify' it though
like to proove the axioms
You can't prove axioms
You can try to show that axioms hold or don't hold
Although it's little just 'show more clearly' because well....you can't prove axioms
yeah hold or not hold that's the term for it right?
Basically to be a valid subspace
You need the 0 vector
and closure under scalar operations
EDIT under the vector addition too
thanks for the clearance
Essentially you're assuming the vector space is already valid
wym by valid?
And inheriting the vector-operations from there
like if R holds or not ?
valid vector space means
vector addition is associative, commutative, has identity element, has inverse element
those are purely vector-related
And those are, assumed to hold so you shouldn't need to show for them under a subspace of a vectorspace
Alternatively
If you had a subspace of a non-valid vector space
That is a contradiction
And contradictions just mean 'everything goes' (or one result of it is) - like 1=0 kind of stuff
So if that happens you could possibly trace that contradiction to the assumption the original vector space was valid in the first place
wow how long are you praticing linear algebra?
no this is standard stuff >_>
well i am an beginner and i am worst in that 
Don't worry about it
If you're a pure math student you need to really get into this stuff
If not you typically 'only' need to master it for R^n
not = applied math, engineering
i am not a pure math student but i might need MATH for my career
Then for you I'd worry more about matrices in general
If you can relate matrices to general axioms of linear algebra great, if not don't worry about it
Guess who passed linear algebra after retaking it the next year ?
you?
Yup and yall wont guess how much I scored😂😂😂
9,5/20
Yeah but 9,5 is considered as a 10
So lmao its fk low
If I had 9,4 I wouldnt pass
well you did had a semester for that course why did you got low?
The problem is my last question was about hermitian matrices,... I had a blackout and completely forgot what that was evn tho I studied it well.
@halcyon pollen as I said, I had a black out
The mast question was on 7 points
blackout damn what happened?
so the subspace axioms are :
- W contains a 0
2.w1+w2 Belongs to W for all w1,w1
3.k.w Belongs to W
those are the axioms?
for subspace vector?
Yes, if W is subset of vector space V then W is a subspace of V if it is closed under addition and multiplication
thanks now i get a context of linear algebra
Can someone show me how to prove that the set of all alternating n linear functions is a subspace?
(cf+g)(a_1,a_2...a_n) is defined as
c(f(a_1,a_2...a_n)+g(a_1,a_2...a_n).
Which is clearly zero if some a_i=a_j
Thanks, I was thinking of showing that all alternating functions are skew symmetric but your solution is much better

how do I know if the rank(2) matrix i computed is a good low rank approximation to use
what are you using it for
Let A be a 5x5 matrix and suppose that det(A)=5. For each row operation (a, b and c), determine the value of det(B), where B is the matrix obtained by applying that row operation to A.
Row operations:
a) multiply row 5 by -3
b) Add -3 times row 2 to row 3
c) Interchange rows 1 and 2
Hey there, I am facing the challange to Prove or disprove the following statement:
dim(V) - dim(ker(f)) = dim(W)
where dim(V) is the dimension of the vectorspace V
what do you think?
As I know that this statement is true I guess it is wrong because it is the wrong sign but i can't find an counter example
Well, your statement would match the theorem if rk(f) = dim(V) right
No because we have a minus and a plus in the other one
Right 😄
That's what is confussing me
Well, it seems in your theorem that f is a function from W to V, but I think in your problem, it might be a function from V to W
but maybe I'm wrong about that
Right, so the statement matches the theorem if rk(f) = dim(V)
so you need to try to find a function f from V to W so that the rank of f isn't equal to the dimension of V
I can't really find any function, because i am not all to familiar with what these actually really mean
Do you understand what the rank is?
Not really sadly
I think that's where you should start
Well it's the dimension of the image of our funtion, but i can't really visualize that and that's where i am struggeling i guess
Like I know all these definitions but that's hard with me
You could look at 3blue1brown's linear algebra videos. Those have good visualizations that might help you
rank is just the dimension of image
they have many uses
one basic use is to easily calculate the area
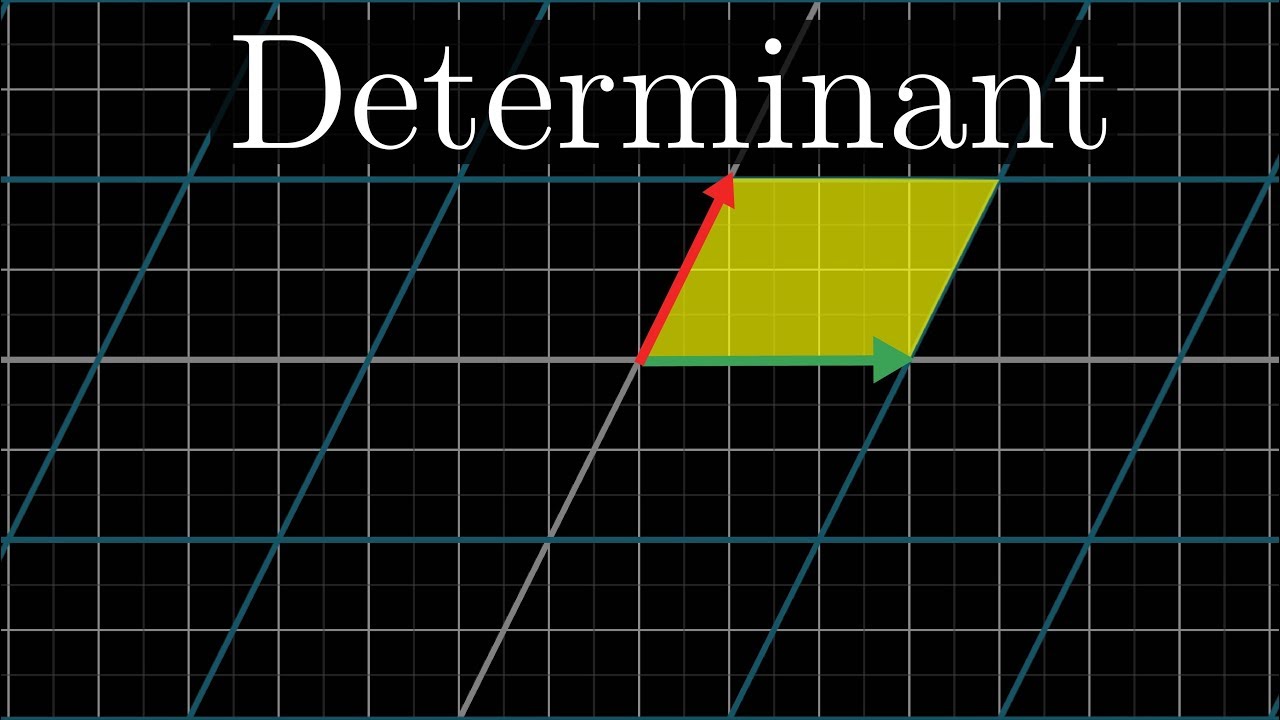
Home page: https://www.3blue1brown.com/
The determinant of a linear transformation measures how much areas/volumes change during the transformation.
Full series: http://3b1b.co/eola
Future series like this are funded by the community, through Patreon, where supporters get early access as the series is being produced.
http://3b1b.co/support
--...
How would I reduce this any further?
Would my next step be to just divide r2 by -7 and just have a fraction?
agh
everything that we learned about dealt with the situations where we have a finite set S
idek where to begin with this one
is the goal to show that the basis for V is a subset of S?
the goal is to show that there is a subset of S that is a basis for V
right
should i instead consider the subspace formed by taking the span of S
idk where that would lead me
because then i know i could extend a basis for span(S) to be a basis of V
but
idk
well, since S generates V, you know that the span of S is V
thats what it means for S to generate V
right
Try this idea
so a basis for S would be a basis for V and then i would have to show that this basis is a subset of S
oh
a basis for S doesn't make any sense
er
S is a subset of V, not a subspace
sure thats true
anyways, my idea would be to
take one element from S, if it generates V, then you have a basis (since one (non-zero) element is independent) and you're done
sure
if it doesn't generate V, then add another element from S
i could continue adding vectors from S until i reach n many linearly independent vectors
Depends what you've proven already and have available to use
oh ok
i think i can use this
we did very similar proofs in class so i will check to be sure
my worry is figuring out if this process terminates ? but i have this feeling we already proved that if we have n many linearly independent vectors that are a subset of the vector space, then we have a basis
ty for the help
if you have, then the question is a lot easier
if you haven't, then you might need to do some zorn's stuff
okay we definitely did not mention zorn at all lmfoa
now i am Thoroughly spooked :3
its ok tho
You are so far it makes me feel dumb for my questions lol
I've noticed lol
bro, i get you don't worry lmao
lmao
this is the stuff breaking my brain
I'd say just play around with a calculator
since you need the entries to go away you should start looking at when they go away when you raise them to powers
well for the entries to go away and turn into 0 at ^3 wouldn't it have to be 0
so a would just be a 3x3 of all 0s
not necessarily
do it by hand then
but do what lol
the rare mero sully
express general form for upper triangualr matrix, cube it and set equal to zero all the elements
So for a question like this
I understand that you have to use $\begin{bmatrix} \cos\theta & -\sin\theta \ \sin\theta & \cos\theta \end{bmatrix}$ and then do arcsin(0.6) or arccos(-0.8) to find the angle
chro
the largest vector under the sup norm is x = (1,1,1,...,1,1)
it's just taking the max of all the components
but that also ends up giving the largest coefficients to the matrix multiplication, which is just the sum of elements there
Does something like this count as reduced row echelon form?
no
So then if there is all 0s on the bottom, except for the last column it still wouldn't count as reduced form ?
Or if that 2 was 1 , then would it count?
i don't, understand. STILL
take an upper triangular matrix
write it out
multiply it by itself
what're the diagonal entries?
try to grasp what the product of two upper triangular matrices is gonna look like first
I don't know what that is

(also dont cross post)
do you know what an upper triangular matrix is?
No i don't, i missed one class day emailed my proffesor and he has given me nothing in 5 days.
it's a matrix of the form
hold on let me tex it
$$\begin{pmatrix}a & b & c \ 0 & d & e \ 0 & 0 & f\end{pmatrix}$$
you're gonna tex the general form of an upper triangular matrix?
(T*(Terra), -dτ)
(google is your friend by the way)
oh just the 3x3 case
if i was your professor i'd tell you to check the textbook 
anyways
this is a (3x3) upper triangular matrix
can you multiply two of these? what does the product look like?
Ive been trying to understand the textbook and online but i just cant. and all he told me to do is "use letters"
i don't know what you are looking for there, i know you can multiply them but no idea if you mean two of what you put or one of the zero matrix and one of what you put
$$\begin{pmatrix}a & b & c \ 0 & d & e \ 0 & 0 & f\end{pmatrix}\begin{pmatrix}a & b & c \ 0 & d & e \ 0 & 0 & f\end{pmatrix}=?$$
(T*(Terra), -dτ)
this is A^2.
and a 3 is just that times og matrix again
yes.
so i do that then have to row reduce to find a-f?
compare the entries
every entry has to be 0
(as a hint, first look at only the diagonal entries of A^3, your life will be much easier)
i'm assuming it has something to do with the fact the diagonal is gonna be a^3 , d^3 , f^3 by the end?
correct
i really don't wanna do this multiplication for the other spots lol, this is getting gross fast
well now you know that the diagonal entries are gonna be 0 if the third power of A is the zero matrix, yeah?
yes which means a, d and f would all be 0?
yes
now let b, c, e be anything
and just calculate A^3
it's not that hard anymore, most of the matrix is zeros
and you'll easily see the restrictions you need on b, c, e
i really don't, im not smart i'm sorry
thats what i'm working on
yea, this just looks like a lot of letters to me at this point
it should be very few letters
i hadn't done any replacing yet because i didn't think i could yet
the whole point of first finding that a, d, f are 0
is so that your life is easier
once you find that a, d, f are 0
calculating A^3 is extremely easy
why wouldn't you be allowed to?
doesn't it just mean b,c,e are free values. it can be any of them and still work because there is an a,d,f in every single position to cancel them out
yes
yes it does
b, c and e can be anything
there are no restrictions on them
and that's your answer
the 3x3 matrices with anything in those 3 entries and 0 everywhere else are the upper triangular matrices with A^3 = 0
this makes me angry lmao, i already had that answer but thought it was wrong
can someone help me with a true/false
if A is an invertible 2x2 matrix and B is any 2x2 matrix, then the formula rref(AB)=rref(B) must hold
true
elaborate on that
A invertible matrix is a product of elementary matrices
wait it's rref is the identity matrix
So,You can get B from AB via a set of row operations
Now,Just row reduce B to rref(B), Since rref(AB) is unique you get
rref(AB)=rref(B)
i don't feel like that's rigorous enough
have you proved row equivalent matrices have the same rref?
do you know a matrix has a unique rref?
yes
My proof is basically if you can convert a matrix A to some row reduced echleon matrix via row operations,that matrix is rref (A)
because of uniqueness
and you can convert A to AB with row operations
*AB to B
also B is A inverse times AB
yes
anyway,your complete proof can be stated as
"since a matrix is row equivalent to exactly one row reduced echelon matrix and since AB is row equivalent to rref(B),we can say rref(AB)=rref(B)"
i'm still a bit unclear on how AB is row equivalent to rref B
how is AB row equivalent to B? is it just because A is invertible?
now AB is row equivalent to B,because A is a product of elementary matrices and you can cancel each elementary matrix in the product via a row operation
yes it's because A is invertible
How do you calculate the determinant of a matrix nxn when n>3?
there are two main ways: the leibniz formula and the laplace expansion
leibniz; here \sigma and \tau are permutations
laplace; here M_(i' j) denotes the "minor" matrix constructed by taking B and removing the i'th row and j'th column [and i' is simply an arbitrary choice of what row to expand on]
this notation is a bit gnarly and might be hard to wrap your head around
how about elimination and then multiplying the diagonals of the matrix :3
but it gets easier with examples
(which is the same thing, but easier to wrap the head around)
@lavish jewel that works but you need to be diligent in keeping track of what youre doing
since row operations do affect the determinant
what does sgn(t) means?
they just do so in predictable ways
what does sgn(t) means?
sign of the permutation tau
again these formulas are a bit nasty so i wouldnt look too much into the explicit formulae i gave
if youre not already familiar with the concepts
but theres a ton of resources for this on google
which explain it better than can be explained in a discord chat
(trust me, i've tried)
aside from the ones namington has given you, the easier ones to understand are multiplying eigen/singular values, if you are familiar with that
isnt that circular?
maybe i misunderstand what youre getting at
oh wait i was misunderstanding
hmm?
i thought you were computing the eigenvalues directly from the det of the char poly
which obviously wouldnt work
since then... youd still need to know how to take dets lmao
but yeah you can just row reduce instead
as long as you watch what youre doing
yeah, gotta keep track of all the scalings along the way
or go crazy with rotation matrices... oof
im working on markov matrices with this problem and i dont understand how to interpret the eigenvalues lol
my work
its the fourth bullet point... how would i interpret 1 and 1/2 in the context of the problem?
<@&286206848099549185> ?
@heavy coral
You're not told to interpret the eigenvalues
Unless you're asking that question in general, then I must say that's beyond my level (although I can direct you to some readings)
i dont think the eigenvalues have much meaning in general
i mean 1 is an eigenvalue for any markov matrix
and the other is always <1
but i dont think it really tells you anything interesting probabilistically
maybe something about stability conditions or something? dont think it helps you answer bullet point 4 though
oh ok how might i go about the fourth bullet point without referencing eigenvalues
i just assumed because it was the previous bullet point
like is there any other way to conclude some kind of probability?
i'd probably look more to the second bullet point for that; informally speaking, this system seems fairly "chaotic" and the different "paths" the results can go down all produce very different predictions
moreover it doesnt actually give you any information on the final value of the stock, just where it was increasing/decreasing
so its probably not great for predictions
but you'd have to express that more formally, i'd imagine
oo thats so big brain
i was thinking it was the eigenvalues 😔
thank you for the help!!!
They do, the 1st and 2nd in some sense
wdym
I must say I have never used the 2nd eig value
But I always 'knew about it' I guess
yeah i read that an eigenvalue less than 1 is considered unstable, and the second eigenvalue is 1/2
hm
not in your link tho
moreover it doesnt actually give you any information on the final value of the stock, just where it was increasing/decreasing
^This is the definitely the answer to the question, indeed, shows that you shouldn't think too much about eigenvalues all the time
that doesnt seem particularly useful here in any case
Ya
but i'll confess i was unaware of this
I was just referring to the question of 'Stochastic Matrices and Eigenvalues' in general
But yes it's a little more upper level
sure
that was a solid quote @limber sierra
I expect you need more functional analysis to go into it
Which is a bit beyond what I think the question is here referring to, so I didn't mention it until the question itself got solved
ah ok it still makes sense
if theres any value this estimate immediately has to stock prediction
itd probably be some sort of volatility prediction
i think i might leave it out just for safe measure and so i dont potentially confuse my professor
not that he would be confused or anything but--
since we would expect a stock that changes signs more often to be more volatile
but even this isnt really a guarantee
this stock changes sign very often but isnt that volatile
In the end you kinda need the degree
this one doesnt but is volatile
Let me get my sources right actually hmm
turns out predicting the stock market with partial information is hard
predicting the stock market with full information tends to get a lot easier, but it's also kinda illegal
Ok, I was going something more like less math more finance, but couldn't find the essay, so this was what I was referring to
https://people.math.ethz.ch/~embrecht/ftp/VaR_RM_v4.pdf
(or any work by Embrecht on Math. Finance)
My point: essentially the statistic you use changes how your risk is measured - so indeed if you use only sign changes, your risk likely not to be fully captured.
And in a real sense, some risk measures are really 👀 bad
Given that the magnitude of vector a is 10 and the magnitude of vector b is 12 and the magnitude of a+b is 17, find the angle between vectors a and b
how would i do this question?
$||a+b||^2 = (a+b) \cdot (a+b)$
moshill1
or alternatively, cosine rule.
you can draw the triangle, yeah
@torpid portal how would i use cosine law
just
17^2 = 10^2 + 12^2 - 2(12)(10) cos(x)
?
thats the one
oh wait sorry lmao i misread ur numbers
naw you still use cos law just with the numbers corresponding to the angle you want
wait no im stupid it is the angle corresponding to 17
that literally is the angle between a and b
this was correct in the first place
wait how is the angle of 17 the angle between them ?
I mean like I'm sure you can draw a diagram for yourself but
oh
yea youre right
i initally thought it was the angle for 12
so i did sine law after getting the angle for 1
17
why
,ti
The current time for Sneaky is 12:13 AM (AEST) on Wed, 10/02/2021.
u right
sorry in advance if the question is badly formed but I'm starting linear algebra studies and I still don't have some concepts clear ..
I wanted to know, if in my vector I have 1 element equal to 0 then is it considered a subspace? Why? (otherwise why not?)
not exactly one, but the first one is equal to zero
I added the translation to my teacher's notes, did I understand something wrong?
It's a subspace
I expressed myself badly when I first brought you the question?
Set is closed under addition and scalar multiplication
so is it why i can do vector addition and multiplication by a scalar?
Could I still have said it was a subspace if the former had not been zero?
or if in general there was not one equal to zero
I mean that depends on the condition you are imposing
Yes, but it would be subspace with itself it would be R^n
thanks everyone for the answers
You need
(i) addition should be well defined
(ii) multiplication should be well defined
For a subset to be a subspace
Yeah, what moonbears said. There is really nothing more to it. I suggest you do the exercises where you prove certain Vectorspaces to be subspace of a vector space and it will be more clear
we haven't done any exercises yet unfortunately and I'm still looking at the theoretical concepts, but I'll keep this in mind.
Sorry if I continue, but then the example I posted is a subspace also (in addition to the 2 things already said) because 0 is contained in W (the subspace contained in the V space)
right but
technically you dont need to check for 0 specifically
0 is often the most convenient thing to check for
but it suffices to check for any vector v
since if v is in the subspace
v-v must be as well
(because it's closed under + and *)
which means 0 is
I understood what I did wrong with this consideration. I thought that it considered a single vector (therefore a single point with a sequence of n coordinates) but a single vector can be a subspace only if the whole vector is equal to 0. Instead, looking at the recording of the lesson, it specifies that t1 must be = 0 for all vectors that are being compared.
Yup, you can see the subset as the set containing all (0, t1, t2,...t_n) where t are real numbers. From here you can see that you that there are no two vectors in the subset which you can combine with addition to create a vector that is outside the subset.
However if you remove the condition t1=0 then the subset is suddenly the set of all n-tuples(which can be considered points in space R^n) or in other words the set of all (t1,t2,...,t_n) vectors which is just R^n and R^n is a subset to itself and therefore you could say R^n is a subspace to itself but that would be redundant.
quick question. my textbook states that given a square invertible matrix A, Ax=b has at least one solution for each b in Rn, and the linear transformation x |-> Ax is one to one
I'm thrown off by the "at least" phrasing of the first part. How could there ever be more than one solution if it's one to one?

there couldn't
as you say
if A is square and invertible, then Ax = b always has exactly one solution
namely, A^{-1}b

Hi anyone knows a way to do Gaussian elimination easily
I know how it works but is there any way to make it work
Like to easily get my result
Do it right the first time
Wym?
that im aware of there's no easier way w/ gauss jordan
You go through the algorithm of getting to upper triangular, then deal with entries above the diagonal
Aren’t there any strategies
Yes.. the algoritm
Oh ok
Yeah wrote that before I saw the message
Do you know any source that shows how this algorithm is performed
Didn’t know about pivots and swaps should be easier now
UW Seattle's MATH 308, Dr. Ebru Beckyel https://www.youtube.com/watch?v=3XMyUREebN8

{kind=link}
MIT MATH 18.06 Dr. W. Gibert Strang http://www.teachingtree.co/watch/reduced-row-echelon-form-(rref)
TeachingTree is an open platform that lets anybody organize educational content. Our goal is for students to quickly access the exact clips they need in order to learn individual concepts. Everyone is encouraged to help by adding videos or tagging concepts.
hmm http only?
how do I prove that the char polynomial of similar matrices are equal?
from my profs notes
i see this
I don't really see where they got det(C^-1(tI-B)C) though
det(AB)=det(A)det(B)
not that step
we have f_A=det(tI-A)
how do you get det(tI-A)=det(C^-1(tI-B)C)
maybe it's the same property as what you said but idk how
i need that C^-1 tI C = tI
right
And C^-1 I=C^-1
Can someone help me on these 2? This is linear algebra and I do not know how to even start.
How would I figure out the equations for these two questions also what does a horizontal asymptote of -2 mean in terms of the equation
Yeah!
ok
2 questions: do you know the definition of a projection matrix, and do you know what an SVD is
i have a general understanding of svd
(you can use a determinant to figure out the change is "size" when swapping coordinates)
mhm
okay, matrix A isn't given
yup
now, let's call A = ULV^H the SVD of A
U and V are unitary matrices, so that U^H U = U U^H = I, and similarly for V
and L is a diagonal matrix of singular values
we can take A^H (same as transpose for real matrices) and get A^H A x = A^H y
then leave x alone on one side, assuming that Gramian A ^H A is invertible, yeah?
yeah
so we get x = (A^H A)^-1 A^H y
i'll go back and change the name of that
let's call it x_hat
x_hat = (A^H A)^-1 A^H y
and now, A x_hat = y_hat =A (A^H A)^-1 A^H y
and the question is, what does y_hat actually represent
so we SVD the hell hout of that bunch of matrices on the right
A = ULV^H
A^H = VLU^H
okay that make sense
so far so good?
aight
now let's take a look at what is inside the parentheses first
(A^H A)^-1 = (VLU^H ULV^H)^-1
but lo and behold! U^H U = I because U is unitary
oh that's nice
so we get (A^H A)^-1 = (V L^2 V^H)^-1
if we expand the inverse, we get
(A^H A)^-1 = (V^H)^-1 L^-2 V^-1
and then we remember V is also unitary, so its inverse is V^H
so V^H^-1 = V, V^-1 = V^H
meaning: (A^H A)^-1 = (V L^-2 V^H). nice enough
so far so good? we're missing two SVDs to get there
yeah im following
aight
so let's take now A (V L^-2 V^H) A^H = ULV^H (V L^-2 V^H) VLU^H
we get those 2 identity matrices there, since V is unitary
that leaves us with U L L^-2 L U^H
but L L^-2 L is also an identity mat, since L is diagonal
meaning that, finally...
A (A^H A)^-1 A^H = U U^H
where U is a unitary matrix that contains orthogonal vectors that span the column space of A
and now, we bring up the definition of a projection matrix
an orthogonal projection matrix satisfies that P = P^H = P^2, i.e. it has hermitian symmetry and is idempotent
so let's test this out
(U U^H)^H = U U^H, sure enough
and (U U^H)^2 ) = U (U^H U = I) U^H = U U^H
so A (A^H A)^-1 A^H = U U^H is an orthogonal projection matrix onto the column space of A
there must be faster ways of showing it, but using SVDs for this is pretty straightforward due to all the nice properties they have
No this is perfect, i just skimmed over a chapter on SVDs and this seems nice and straightforward
thank's for doing all that haha
i assumed the matrix was full rank here, but you can do the whole procedure with the "economy size SVD" if it's rank deficient. same meaning
just gotta be careful that in the economy case, U^H U = I, but U U^H =/= I
okay
straightforward consequence of no longer spanning the whole space
and yeah it's full col rank
I have another, much more simple question about a problem if you have the time
So I have the Nul and Row span's calculated
and I obviously cant add them because they are different dimensions
Do i just need to use an identity to put it into a form to add the two vectors?
umm, the Nul(A) vectors are in the form 4x1 and the Row(A) are in the form 1x4
ah
so i cant add them
you forgot the first rule of "modern" linear algebra
all vectors are column vectors
ahhhh
or, in other words, the row space is actually the image of A^T
aight
what is the difference between algebraic and geometric vectors and could someone give an example to show the difference
please @ me if you respond
<@&286206848099549185>
Any tip for graphing 3D Sufaces ?
It is getting kinda hard for me
algebraic vectors are the elements of a vectorial space
Do you know what a vectorial space is ?
not really
Well, if you have a set S such that:
Then S is a vectorial space and has some interesting features
Algebraic vectors are just set of numbers in a certain order, considered part of a vectorial space with its operations defined
In R^n they are seen as the same but geometric vectors kinda make no sense in finite polynomial vector spaces nor in the finitely generated vector spaces of continuous functions etc.
the addition operator can be redefined as long as it fullfills the listed axioms afterjack posted
could you give me an example of an algebric vector and an example of a geometric vector i think ill understand the difference there @digital bough
In fact, as ds said that vector can be thought in both ways
I guess that you should take a look at vectorial spaces and linear dependency. I promise you that is it worth
The typical distinction is that geometric vectors are viewed as arrows in space which you can add together (tip to tail), cross and dot products, as scalar multiples.
Algebraic (also called Cartesian) are the purely algebraic representation, which basically takes a point on the plane / in 3D space and associates a vector arrow from the origin to the point in space
so would < 1, 2 > be a algebric vector
Cartesian and Geometric are 2 sides of the same coin, both being vectors in space
Yes
would resultant vectors be geometric vectors?
resultant vectors is the result of adding/subtracting/scaling vectors
so they can be both geometric or cartesian, but you'd typically hear resultant w/ geometric more
and to go back to R^n, R^2 for example is the xy plane, R^3 is 3D space
in this example
vector v is a algebric vector
and vector w is a geometric vector?
The [1,2]^T would be a cartesian, and 30N[E35N] would be geometric
^T just means make it a column not a row tl;dr (This is massive oversimplification of what ^T means, but for this case it's sufficient)
cartesian means algebraic right
yep
so the only difference between geometric and algebraic is that algebric vectors are defined as points on a graph or plane and geometric vectors are defined as quantities with direction
is that right?
Pretty much, yes
could you explain this
Geometric vectors are more associated with the geometric operations (v+w is adding tip to tail)
Cartesian vectors are more associated with points in R^n
$[a,b]^T = \begin{bmatrix} a \ b \end{bmatrix}$
moshill1
Explaining more goes beyond the scope of high school vector stuff, but if you're interested I can explain
that would be geat
so (a,b) are the x and y components right so that [x y] is the matrix thing
^T is called the transpose operator and all it does is it takes a matrix as its input it spits out a matrix with the rows becoming columns and vice versa
a matrix doesnt necessarily represent a bunch of vectors
so how would you read that matrix as
You'd just say it's a matrix
but dosent the matrix represent points?
Conceptually I find the transpose of a vector slightly confusing
they dont represent points; that's vectors
It makes me want to think of everything as a matrix, including the 1x1 matrix
I wonder if that's just a notational convenience
so would that be 6 units right, 5 units up and 0 units diagonally @limber sierra
would what be?
you mean the transformation that vector represents? no
so what is that matrix representing?
"matrices represent linear transformations
[9:52 PM]
or systems of linear equations"
$\begin{pmatrix}6&10\5&3\0&2\end{pmatrix}\begin{pmatrix}x\y\end{pmatrix} = \begin{pmatrix}6x + 10y \ 5x + 3y \ 2y\end{pmatrix}$
Namington
so it'd be the linear transformation that maps an (x, y) vector from the 2d plane to (6x+10y, 5x+3y, 2y) in the 3d plane
they give the coordinates of the 3d vector that you get
when you apply this matrix to (x, y)
for example, if you apply this matrix to (3, -1)
the resulting vector is (18 - 10, 15 - 3, -2)
that is, (8, 12, -2)
so this matrix maps (3, -1) to (8, 12, -2)
the first vector is of course a 2d vector whereas the second is 3d
that's fine
yes.
so lets say we have a matrix of just (1,2) and we wanna map out (3,-1) on it
how would we do that
$\begin{pmatrix}1 \ 2\end{pmatrix}\begin{pmatrix}3\-1\end{pmatrix}$ doesn't make sense, you can't multiply column vectors; however, [\begin{pmatrix}1 &2\end{pmatrix}\begin{pmatrix}3\-1\end{pmatrix} = \begin{pmatrix}1 \cdot 3 + 2 \cdot -1\end{pmatrix} = \begin{pmatrix}1\end{pmatrix}]
Namington
this isnt a particularly interesting linear transformation
yes; since we have a 1x2 matrix times a 2x1 matrix, the product is a 1x1 matrix
which would represent a vector from R
so its a 1d vector
again, the product of two column vectors doesnt make sense
they have the wrong dimensions for you to multiply them
[you can take dot/cross products but those are different]
For multiplying matrices, you need the # of columns in the 1st to equal the # of rows of the 2nd
what if instead of 3,2 we had 3,2 and 10,1 multipled by 3,-1
Namington
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)
sure
they have the right dimensions
since the first one is 2x__2__ and the second is __2__x1
those match
so we can multiply them
and when we actually multiply these matrix together what are we essentially doing?
like what is that matrix multiplied by 3,-1 represrnting just the transformations?
basically
it's just convenient notation for linear transformations
the original motivation for the definition of matrix multiplication comes from using them to represent systems of linear equations
for example
consider the system[
\begin{cases}
5x + 3y + 4z = 2 \
-2y + z = 1 \
x + z = 0
\end{cases}
]
Namington
it's pretty inconvenient to write out teh full notation every time we want to write out a system
so instead we come up with convenient notation for it:
yea we would just solve it through subsutition and stuff
[
\begin{pmatrix}5&3&4\0&-2&1\1&0&1\end{pmatrix}\begin{pmatrix}x\y\z\end{pmatrix} = \begin{pmatrix}2\1\0\end{pmatrix}
]
Namington
and you can see how our definiiton of matrix multiplication makes this matrix equation correspond to the above system
each "column" of the left hand matrix represents one variable
so the first column is the x's
the second is the y's
the third is the z's
and then taking the matrix product with the (x y z) vector makes us add them all together, i.e. turns them into a linear expression
this works even for "missized" systems
for example
if we added another equation:[
\begin{cases}
5x + 3y + 4z = 2 \
-2y + z = 1 \
x + z = 0 \
2x + 2y - 2z = -15
\end{cases}
]
Namington
we could adapt:[
\begin{pmatrix}5&3&4\0&-2&1\1&0&1\2&2&-2\end{pmatrix}\begin{pmatrix}x\y\z\end{pmatrix} = \begin{pmatrix}2\1\0\-15\end{pmatrix}
]
Namington
note that we have the same amount of variables so we didnt have to resize the (x y z) solution column
we just needed to add another row (another equation)
NOT another column (another variable)
so then how do we solve for the values of x,y,z using matrix
there are various ways; the conventional one is to set up an augmented matrix and row reduce.
could you show me one
(Basically elimination method but quicker)
there are various videos on youtube, its kinda awkward to show off in a discord setting
the key term to google is "gaussian elimination"
sorry if im asking for alot of steps its just that ive learned more in the last 15 minutes then in the 2 weeks of class

Thanks to all of you who support me on Patreon. You da real mvps! $1 per month helps!! :) https://www.patreon.com/patrickjmt !! Thanks to all of you who support me on Patreon. You da real mvps! $1 per month helps!! :) https://www.patreon.com/patrickjmt !!
Gaussian Elimination. Here we solve a system of 3 linear equations with 3 unknowns u...
For small hand-crank problems with 2/3 variables, your eyes are faster
naturally when learning it'll take longer
but you want to get the feeling of what RREF is doing
but when computers solve systems of linear equations
(which is done very often in, say, computer graphic rendering in movies/video games/etc or when setting up statistical models in machine learning or finance)
they do this process
since its faster than substitution and a more "clean" form of elimination
oh i see
also is there a way i can save this convo so i dont forget everything later
right click -> Copy Message Link but
i think it reuires enabling something in discord settings
first
oh okok got it
thank you for all the help @limber sierra @nocturne jewel
im gonna go to bed now but i learned alot more here than in class lol
How would i find the transformation of a reflection across a diagonal line through the first octant in R^3. I have drawn it out and i can visualize it
I want to transform any vector v so that for transformation F, Fv results in a reflection where the head of v is reflected across the diagonal i described
<@&286206848099549185>
A linear operation like that is determined by what it does to the unit vectors
so you can compute the transformation for the unit vectors, and use the result as the columns of your matrix
Okay that makes sense
I'm a little lost on putting the transformations into numbers
mainly because it's in R3
well one issue is that when you say diagonal line, it's not clear if you mean plane
Not a plane
so what would you get if you flipped (1,0,0) across your line?
yeah haha [0, 1 , 0]
then do the same for (0,1,0) and (0,0,1)
ahh
then your transformation is the matrix [T(1,0,0), T(0,1,0), T(0,0,1) ]
where those are the columns
so it sounds like you'd have [ [0,1,0], [1,0,0], T(0,0,1)]
yeah
ya
a bit more abstract of a question, but if I were to draw a line between the initial point P and it's transformation P', that line PP' would be orthogonal to the diagonal line though the octant?
yeah I mean that sounds like the definition of reflection
haha okay fair enough
isn't that transformation more of a 'rotate 180 around this line'
oh okay lol
sorry i should have said that from the beginning
okay so I'm doing this problem
a is very easy to prove and right now I'm working on b
I had the idea to write $m(v) = \langle -i \Gamma v, -i \Gamma v \rangle$ for the standard euclidean inner product
bacono
and from there you can obtain $\langle \Gamma v, \Gamma v \rangle = \langle \Gamma L v, \Gamma L v \rangle$
bacono
I'm trying to prove that L is a lorentz matrix, but I'm not sure if I'm just missing some nice property of orthogonal matrices or something to get the property I need
okay yeah from here if you substitute $v = \Gamma w$, since $\Gamma = \Gamma^{-1}$ we obtain $\langle \Gamma L \Gamma w, \Gamma L \Gamma w \rangle = \langle w, w \rangle$
bacono
$\left[\begin{array}{ccc|c}
-k&1&0&1\
0&-k&1&k\
k^3&-3k^2&2k&k^2
\end{array}\right]$
nix
what would be the most efficient way to solve this system?
a particular solution is really the priority as the null space is already known
looking at the middle row
er wait i thought there was a simplification you can do, never mind
hm
i mean surely if you just want a single solution, fix k = 0
or k = 1 or whatever
k = 0 is probably the fastest since your bottom row immediately zeroes out, and then the above two rows are easy to analyze
k is a known value not a variable, sorry should have mentioned
ah
i mean in that case i cant immediately see any optimizations
besides just plugging in k
unless you mean k is fixed but not known
ah
okay then, dividing through rows by k is probably a good bet
or pwoers of k
like you can immediately get $\left[\begin{array}{ccc|c}
-1&1/k&0&1/k\
0&-1&1/k&1\
1&-3/k&2/k^2&1/k
\end{array}\right]$
wtf did i break
Namington
since we know there is a null space, the first two rows are independent, and a solution does exist, can we disregard the third row entirely?
no?
oh wait i see what youre asking
uh
my matrices-as-systems intuition is pretty weak nowadays
but that makes sense
er actually no
we might not be able to disregard the third row
specifically
even if the first two are linearly independent?
Your system might be inconsistent
that is generally true, but in the situation where this problem originates a solution is guaranteed
i.e. finding a generalized eigenvector
so in general tho row reduction is as good as it gets for something like this?
I'm doing an interesting problem.
Let $X_{1}, \ldots, X_{N}$ be i.i.d withdistribution $\mathcal{N}\left(0, \sigma^{2}\right)$and let $X=\left(X_{1}, \ldots, X_{N}\right)^{T}$. Furthermore define
$$
\tilde{X}{i}=X{i}-\frac{1}{N} \sum_{j=1}^{N} X_{j}
$$
and $\tilde{X}=\left(\tilde{X}{1}, \ldots, \tilde{X}{N}\right)^{T}$such that
$$
\hat{\sigma}^{2}=\frac{1}{N} \sum_{i=1}^{N} \tilde{X}_{i}^{2}
$$
- Show
$$
\tilde{X}=\left(I_{N}-\frac{1}{N} \mathbf{1} \mathbf{1}^{T}\right) X
$$
- Show that the symmetric matrix
$$
B=\left(I_{N}-\frac{1}{N} \mathbf{1 1}^{T}\right)
$$
has the eigenvalues $1$ withmultiplicity $N-1$ and $0$ with multiplicity $1$.
Hint: Thematrix determinant lemmagives
$$
\operatorname{det}\left(c I_{N}+b \mathbf{1 1}^{T}\right)=(1+b N / c) c^{N}
$$
Find the characteristic polynomial for $B$.
- Show by diagonalization that $B=Q Q^{T}$ for an othogonal $N \times(N-1)$ -matrix $Q$. ( $Q$ being orthogonal means $Q^{T} Q=I_{N-1}$.)
¬shm
I'm at the 3rd sub-problem. What to do here?
what does space mean here? (Book:vector calc, Linear Algebra-a unified approach by Hubbard&Hubbard, page 199, topic: interpolation and the dimension formula)
set?
Set which is a vector space
how is a polynomial a vector?
The set of all polynomials of degree<=k is a vector space
And that set is what hubbard means here
Check the vector space axioms
It clearly satisfies the abelian group part
and the 4 scalar multiplication axioms work too
ok here is the definition of a vector subspace
A non empty subset $V \subset \mathbb R^n$ is a vector subspace (or simply subspace) if it is closed under addition and closed under multiplication by scalars.
ElonMoist
it is defined using vectors
That's a subspace
If you ALREADY have a vector space,A subset which satisfies that is a subspace
does that answer this question 🤔
because it says $p \in P_k$ where is $p$ is a polynomial
ElonMoist
A vector space is different
I haven't seen any definition of just "space" in the book 🤔