#linear-algebra
2 messages · Page 152 of 1
huh -_-a
@tame mural no. take rotation
doh have to change my thinking
@wintry steppe it's true but you just need 1 eigenvector that has a nonzero eigenvalue, then a line that gets mapped to itself is the span of that eigenvector. you can show it; let a linear map A have an eigenvector x with an eigenvalue L!=0. show that A(span{x})=span{x}
I asked this like 12 hours ago but I'm very unsure about my answer so I just wanted to see if I could confirm it by any chance
Axioms 4, 5, and 8 fail.
4 fails because u + 0 ≠ u in this vector space. u + 0 = 0
5 fails because 4 fails. It uses the zero vector definition in 4.
8 fails because (c+d)u ≠ cu + du in this vector space. (c+d)u = 0
my intuition is that it's a vector space
is that the cop of beware of dangerous opinion 😄
but I'm used to a more fuller incantation like "A vector space over a field"
wrong statement not opinion
I interpret the two cases as definition for a transformation, and they're asking if after the transformation we still have a vector space
R^2 over R is of course a vector space
and when people don't specify the underlying field, I assume it's just from the same set
@blissful pagoda 8 fails but not for that reason. it's bc c(x,y)+d(x,y)=0 for any c,d,x,y and so isn't equivalent to (c+d)(x,y)
I don't know what you mean by a "transformation." They're giving you non-usual rules for the addition
So, for example, you should be able to derive from the axioms of a vector space that
(1+1)(x,y) = 2(x,y) = (2x,2y)
but on the other hand you also have
(1+1)(x,y) = 1(x,y)+1(x,y) = (x,y)+(x,y)=0
I'll correct that, that's what I wanted to say but I didn't know how to thanks
since (2x,2y) doesn't equal (0,0) in general, this doesn't satisfy the axioms
Well
What I thought was that this is a a trivial vector space
with only [0, 0]
So it satisfies all the axioms
meow, that's nowhere near what the question is asking. R^2 IS an R-vector space with usual rules of adding/scaling. read the above operations on R^2. they're not the usual ones. you check the vector space axioms and you see R^2 with these rules fails to be a vector space
also for future reference one doesn't need to check every single axiom. just showing a set fails to satisfy one of them is enough for the set to fail to be a vector space
I said
"4 fails because u + 0 ≠ u in this vector space. u + 0 = 0
5 fails because 4 fails. It uses the zero vector definition in 4."
Is this correct because even though the axiom 4 fails, I know I still have (0, 0) in the vector space (since that's what the addition rule stated in the question says) and (0, 0) is normally the zero vector
Because axiom 5 actually would hold as adding two vectors does equal (0, 0) as axiom 5 stated, it's just that axiom 4 fails, the definition of the 0 vector that axiom 5 uses the definition of
no. (0,0) is the 0 vector in R^2 with the usual rules of adding/scaling
this is R^2 with different rules. you showed there doesn't exist a 0 vector so you can't even hope to satisfy axiom 5
Okay makes sense, thank you
you're welcome
can someone explain what I did wrong on b
so im solving for the coefficients?
hmmm
Can someone point me in the right direction with this problem? https://prnt.sc/vw1thl


hmm my images are not showing up
Can someone help me with this please, I cant find an approch except x1 + ... + xm = 0 and y1 + ... + yn = 0 and 0+0=0, but I don't think thats a valid proof.
@silk dragon Try to figure out the 2x2 matrix without thinking about the right vectors that would satisfy it. Because of Bw = 0 we know there's a non-trivial nullspace, which means our matrix only has 1 row to think about.
That makes a lot of sense thanks @tame mural. Is it then possible that Bv = -v cannot hold true?
Depends on if it's a trick question, but I found an answer that works
So I don't think it's a trick question
stumped
the u and w vectors are easily doable with the information you've given me but I'm not too sure about the v vector
So maybe I am wrong about my matrix B
Still haven't found it, can you enlighten me @tame mural
Are you sure the answer is a nonzero vector @tame mural
how do you use the system on equations again
Anyone know where to start with linear algebra, a book recommendation would be nice to practice shit fast and easy (got an exam coming up in 2 weeks)
really tried wrapping my head around it with youtube and some books but they're too complex for a beginner with all the symbols 😂
But if you're studying for a test, what could be better than your own textbook
Esp. if test is in 2 weeks
there's no textbook
-_-a
only lecture notes
ikr it's so dumb, he recommended like 5 books lol
3B1B on YouTube is recommended for digesting what books say
Gilbert Strang will walk you through all the major forms and how to hand-compute
im not sure if someone just deleted their question about if they know one eigenvalue of a 2x2 matrix, whether they can determine the other by computing det(matrix), and yes
Also the trace
"My" prof really emphasized techniques that require the least amount of work possible. his tests and examples usually had matrices where you could gleam the eigenvalues just from the trace and determinant.
or just inspection in general
lol
yeah

determine the eigenvalues by just visualizing the transformation bro
smh
true. idk why everyone doesnt just do that
@shrewd mortar would you mind giving me the answer to the question I posted above? I still have not found it :c
@silk dragon right so what kind of vectors are u, v
for M
hint: they're [something]vectors of M
or uh of B
lol
well, nonzero...?
yes
sorry, i don't see how you drew that conclusion
tell me the definition of an eigenvector of a matrix M
yes
yep, their product
yup
so if you let B = (a, b ; c, d) then det B = ad - bc = 1*-1
as these are the eigenvalues of B right
Yes, right.
and do you know about trace B in terms of eigenvalues
have not learned trace, no
uh well i mean you can bash it already
wait
I'm confused
how do you have a 2x2 matrix with Bu = u, Bv = -v, and Bw = 0?
might also help to just think about the char poly of B and get another equality for the coefficients from that
how are you going to give a matrix like that
One of my questions was if one of them is impossible
is one of them impossible?
o lol
that's probably my main question
wait what was the orriginal question precisely again

well yeah actually just think about, we have a condition on the det already, and now think about what the last equality gives for the det
@silk dragon are you familiar with the last equation being equivalent to another property
Which property?
something to do with invertibility
you have Bw = 0 for nonzero w
if there did exist a B^-1, what could you do with that
another thing you could observe is that a 2x2 matrix can't have 3 distinct eigenvalues...
lol
🤦
this is pretty simple too though
so, you should just know this equivalence btw
if the kernel is nontrivial then it's noninvertible
(kernel = nullspace, different terminology is all)
so if you have indeed Tv = 0 with v nonzero
if there was a T^-1 you would get T^-1Tv = T^-1 0
right
yeah that makes sense
so we showed nontrivial kernel => noninvertible, can you show the other direction
well if determinant != 0
(hint: noninvertible means det 0)
yes
(now think about det in terms of eigenvalues)
both the eigenvalues should equal the determinant
i.e. you are now showing noninvertible => nontrivial kernel
multipluied
which is the same as det = 0 => nontrivial kernel
👍
so what is det in terms of the eigenvalues again
thank you
it's just their prroduct right
yep
if det = 0 its non invertible
and then you have
if det M = 0 then what does that say about the eigenvalues of M
well just think about it like this
det(M) = l_1l_2...l_n with l_i the eigenvalues
= 0
hence there's at least one eigenvalue equal to...
0
Nicely explained
0 is an eigenvalue
hence nontrivial kernel
as there's vectors such that Mv = 0*v = 0
ah indeed
since we have that det(M) = 1*-1 (the eigenvalues) but also det(M) = 0
which is impossible
its not too difficult to come up with an example of a 3x3. if you dont want to trivially use a diagonal matrix and you have some specific u,v,w in mind you can use diagonalization (assuming u,v,w are linearly independent)
i doubt you would actually want to do that but yeah lol
when finding row and column space do i perform row operations until REDUCED ROW echelon form or just ROW echelon form
doesn't matter
i suppose it doesnt really matter
it depends, if you can see in RE form, then there's no need for RRE
as long as you can see which columns are linearly independent and get the rows to be linearly independent then i guess youre good to go
you gotta go fast here, you know!
but it changes my answer from {(1, 8, 4, -6),(0, 1, -4/3, 5/3)} to {(1, 0, 43/3, -58/3),(0, 1, -4/3, 5/3)}
this is because i performed one last row operation to make sure the leading 1 was the only nonzero entry in its column
there are infinitely many possible bases for any given vector space except the zero vector space
is here a way i can tell from just eyeballing it
*there
wdym
yeah, for that do it tell RRE form, then it is mostly obvious
mhm but i would like to reduce as much work as possible as you guys said so if i know when my rows and columns are linearly independent before actually reducing all the way to rref that would be good
determinant?
System of rows of square matrix are linearly dependent if and only if the determinant of the matrix is equals to zero.
but that only works for square matrix
doesnt work if you dont have a full set of vectors yeah
often you can eyeball it
but theres no strict formula for at what point it becomes obvious of course
it depends on how messy your matrix is to begin with
if it is too messy, and you are lazy, use symbolab
yeah any site, I use both for different works
there are infinitely many possible bases for any given vector space
{0}
😦
I feel like I must have missed something because the only way I can think of testing linear independence/dependence is to see if a row = 0 has a nontrivial solution lol
Other than of course having a row be a multiple of another row
right?
actually there is a relatively pointless benefit to getting rref though now that i think about it. for an mxn matrix A of rank r then if you put the rows of the rref matrix in an rxn matrix R and the columns the rref matrix told you to choose for your coulmn space in an mxr matrix C then A=CR. not sure why youd do that but there you go.
row reduction always shows linear dependence
row operations are just replacing rows with linear combinations of all the rows. so if you get rows of zero thats because you found the linear combination that cancels out one of the vectors.
and row operations also preserve column relationships, and its much easer to see in a row reduced matrix
https://i.imgur.com/UP0OHp4.png I understand how to get i but can someone explain ii in a little more depth for me?
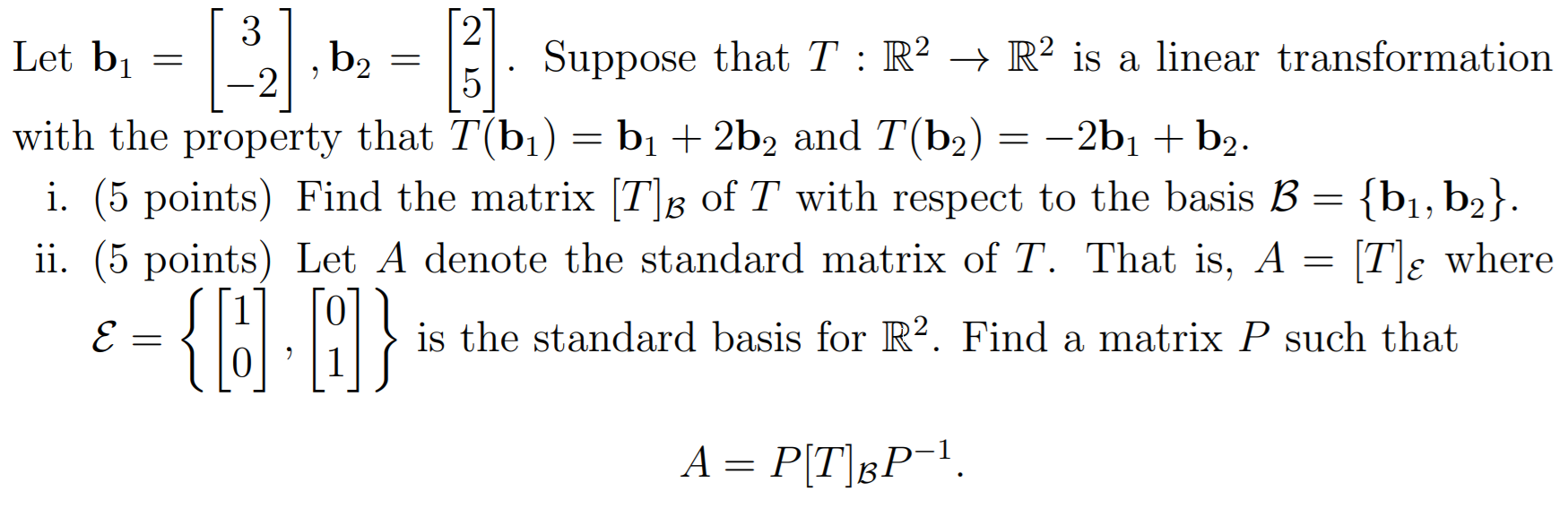
so do i use what I got in part i? @round coral
im a little confused as to what exact operations i need to do
you have to do this , e_ [T]B . B [T]B . B [T]_e
where e_[T]_B simply means that you are sending the standard basis vectors to the chosen basis that you have B
because the det is even
 jk
jk
but uhh usually think about how trace and det relate to eigenvalues
trace is the sum of all eigenvalues and det is the product of all eigenvalues
but how does that help with this
from Axler 3.B, page 67.....this is an iff statement....idk why he's only asking us to prove this in one direction.




oh i meant how do you get eigenvalue of 5 not 2 from that matrix
okay....i mean fair enough. yeah, i'll do that.
am i missing something, is he asking that it be proved in one direction only? or is that language meant to say prove it in both directions?
(there's a parallel convo going on about trace of dets, i'll just prove it both ways. dont need this to take up air time.)
you're thinking about this too hard lol
I am a ninny.....comes with the territory.
yess
im done with linear algebra
that is all
b-but linear algebra is easy, right? haha 
the class i took was
but typing matrices onlinne is not
i will say that the second level of linear algebra looks daunting
what's lvl 2
applied is super easy but abstract idk yet
i think thats like proof-based stuff for my university
@silk dragon This is probably out of bounds for your question, but
The answer I got was M = [[1, 0], [0, 0]]
meow
The non-trivial vectors that would satisfy the problem are...
[1, 0] and [0, 1]
M [1, 0] = [1, 0]
[1, 0] + [1, 0] = [0, 0]
So there are in fact non-trivial vectors where Mx=0, Mx=x, and Mx=-x
I don't believe there's an inner product space in this world
But it is a vector space
this is silly idea?
You can always make a vector space into an inner product space
But if you try to
maybe I'm mistaken
for this world
there are vectors which are orthogonal to themselves
hence it would have to be a degenerate form
Orthogonal as in (v,v)=0?
Go on
Nvm
So you agree?
Not every vector space should be an inner produce space
they are <strict> subsets
right?
yes because in this world
we cannot have ordered field, I THINK
that was my reasoning so far
so yeah, for that guys question
I think it was possible
There is Mx = 0, Mx = -x, and Mx = x
For non-trivial choices of x
schoolgebra
technically linear algebra 
see pins
@coral ferry well Idk since the sum of the identity + A can make that new matrix invertible since if A itself is not invertibale, I guess.
It's written here that ${(a,b,c) \in \mathbb{C}^3 : ... }$
LINEAR_ALGEBRA_GUY
So, if the nullspace is trivial ( isomorphic ) it means that the determinant of that ( nxn ) matrix is not zero, which means the dimension of the nullspace is zero, this means that A is invertibale. But if itself is invertable, isnt there a posibility that the new matrix ( sum of Identity and A ) itself is not invertibale ? Thats what Im wondering
But I thought $\mathbb{C}^3$ is a 6-tuple, since we need 2 coordinates for each part?
LINEAR_ALGEBRA_GUY
LINEAR_ALGEBRA_GUY
In terms of tuples
Or more like this? [[R, R], [R, R], [R, R]]
You mean that a is a complex number? yeah
C^3 just means a list of 3 complex numbers...
@viscid kernel oh yea A might or might not be invertible
i don't know if A being invertible will help with this proof tho
@wintry steppe in C^3 each coordinate is a complex number
who told you C^3 was equal to R^6? who told you these two were the same?
they are (informally) similar, and are in fact isomorphic as real vector spaces but they should not be blindly identified
is there a way I can simplify $ (I- A)(I + A)^{-1} (I - A)^{-1} (I + A)
did i do that right
oops i didn't get the bot right
$(I- A)(I + A)^{-1} (I - A)^{-1} (I + A)$
snoopy
ok oof bot works
yea so is thre a way to simplify this?
where I is the identity matrix
A is askew symmetric
these should all commute
ah ok
is there a name for the property
so i can just search it up or smth
nevermind I bruteforced it
thank you for your help
what does this theorem says? I have read it but I don't understand it
Starts from the part : .... then assigning to each linear ....... until the end
Also what is that symbol that looks like L, L(V,W) is that kernel or something?
L(V,W) is the set of all linear transformations from domain V to codomain W.
Even more than that, a proof will show that L(V,W) is a vector space in its own right, so it is sensible that it may be used as a domain of another linear transformation, which is your example is called M.
T lives in L(V,W) actually. Do you can sensibly say something like:
ninnymonger is a physics main.
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)
This theorem says that linear maps can be written as matrices and vice versa, that is $\mathcal{L}(V,W)$ is isomorphic to $M_{n \times m}(\mathbb{F})$.
bacon prince
isomorphic means there exists a bijection.
so it basically says that I can write a linear transformation as matrix or vice versa, am i right?
If that’s true, then that seems like a powerful theorem.
yes i think it is very powerful though because we can actually write a linear transformation into matrix
so we can compute the linear transformation with matrix property..?
well it is used without proving in high school and mid school, so yeah
kids learn about isomorphisms in mid school and high school?
they use the matrix of a linear map to solve systems of linear equations in high school though
oh
yes, $\exp: (\bR,+) \to ((0,+\infty), \cdot)$ is an example of one
derivada.schwarziana

maybe you'll see examples of isomorphisms
but if you go up to the average middle schooler and ask them to give you an isomorphism
i doubt they could
unless they're one of the prodigies on this server
Does an SVD only work when the matrix is positively definite
SVD works on all matrices afaik
oh i think maybe i get your question
A^T A will always be positive semidefinite
what is the difference between semidefinite and definite
i believe definite means strictly nonnegative while semidefinite means including zero
but im checking that
then yeah there you go
you can pretty much always believe in symmetric matrices
they never really let you down
indeed. the eigenvectors of symmetric matrices are always orthogonal
or at least you can get an orthogonal basis out of any eigenspace
ok that makes sense. Thanks
np
eq 1.3.18 says the matrix of the inverse transformation is the inverse of the transformation matrix, right?
The matrix of the inverse transformation is the inverse of the matrix of the transformation yeah
alright, thanks
Would anyone be able to look over a proof I did?
I already completed it, just need someone else to verify I didn't do something stupid
maybe, put it up here
yeah thats good
but it can be more concise using the sigma notation
$e^A=\sum_{n=0}^\infty \frac{A^n}{n!}=\sum_{n=0}^\infty \frac{(PDP^{-1})^n}{n!}=\sum_{n=0}^\infty \frac{PD^nP^{-1}}{n!}=P\left(\sum_{n=0}^\infty \frac{D^n}{n!}\right)P^{-1}=Pe^DP^{-1}$
nix
smh even a middle schooler could give the trivial isomorphism
one of "send everything to itself" or "send everything to the identity"
ez
I'm sure middle school me could give one of those
Every time someone tells you the entries of a matrix theyre basically doing an isomorphism
"The matrix is a,b,c,d"
smh that's too hard
in person?
you need to know manifolds for coordinate free stuff
I don't even know what manifolds are smh
well I kinda do but not really
Pretty sure thats abstract algebra, but essentially a group is a set of elements with an associative law of composition, an identity element, and an inverse for every element.
Think of nxn invertible matrices under multiplication (the general linear group). Matrix multiplication is associative. Multiplying by the identity matrix doesnt change any other matrix. And any invertible matrix has an inverse such that when theyre multiplied together you get the identity.
I've to find the real parameter a such that their are infinity solutions and a a such that x + y + z is the smallest possible natural number
I've tried using the ranks of the coefficients matrix and row echelon form
but Idk what to actually do with it
I think of groups as integers under addition but with optional commutativity
thats also a mighty fine group
i just prefer the general linear one because it isnt commutative. i worry someone will assume all groups are if theyre just given the integers first. thats just me though
is there a difference between a R^2 vector and a R^n vector with only the first two entries actual values and all else 0?
That is a subspace of R^n which is "isomorphic" to R^2
That's the word to articulate the way in which those two vector spaces are related.
makes sense. kinda like how coplanar lines can be extracted from 3D and mapped on a plane
yeah formally speaking theyre different things, but theres a function that "relates" them in the "obvious" way
and for all intents and purposes
you can interchange one and the other
and be fine
just dont try and add a vector from R^2 to a vector from R^17 or whatever
(but you can apply the function to make the first vector its "equivalent" from R^17 instead, and then add them as expected)
That function being both surjective and injective
is the function you speak of a matrix?
it's linear, so you can write it as a matrix
You can represent it as a matrix yeah
it's just the map $\begin{bmatrix}a\b\end{bmatrix} \mapsto \begin{bmatrix}a\b\0\0\\vdots\0\end{bmatrix}$
IsolSingPts(X)
Which is very easy to invert (just switch the direction of the arrow basically)
might be a good exercise to think how you'd write this as a matrix
my original question came from an exercise asking for a transformation from R4 to R2 actually
came up with a rightside multiplication by a 2x4 matrix
I know a professor who calls this the fundamental theorem of linear algebra
Every n-dimensional vector space V is isomorphic to R^n
Yeah that's exactly right
you both have been very helpful, thank you
there's a bunch of "fundamental theorem of linear algebra"
different people call it different things
not one of the more widely accepted fundamental theorem names
Of course. I personally find it the most important and fundamental but I wouldn't say it is absolutely. 
if i had to choose a "most fundamental"
it'd be that the different definitions of basis coincide
Interesting
ok george
.
🤔

whats a good intuition for the transpose of a linear transformation in the context of dual spaces?
its just the regular ol' dual map
wdym by that
If (Af)(x)=f(Tx),for all functionals f and all vectors x ,A is transpose of T
btw, by dual map i just mean if you have a linear map $T : V\to W$ you get a map $T^* : W^* \to V^*$ given by $\varphi \mapsto \varphi \circ T$
kxrider
in the context of matrices from Rn to Rm, T* is the transpose Drake is talking about
Shouldn't it be V* to W*
no T* goes from W* to V*
mb
which i agree makes things weird
Weirder than a midget giving a parrot a back rub?
Consider g(x)=f(Tx) ,g is obtained by fixing the functional f and applying a transform on the vector. Now,Can g be obtained by fixing the vector and applying a transform on the functional? That kind of seems like a natural thing to ask
magnitude of the vector v
Isn't that ||v||
both notations are used
Oh
i prefer |v|
Okay i was gettng confused lol
So the dot product of a vector and itself is its magnitude/length/norm^2?
yeah
the magnitude/length/norm is more generally defined as the square root of inner product of a vector with itself
the dot product isnt the only way to define distance 🙂
right so I get this but it feels rather arbitrary compared to how non-arbitrary of an operation the transpose does to a matrix
idk maybe i just need to let it sit and do some problems involving it
@hollow finch The dot product of u = {u_1, u_2, …, u_n} and v = {v_1, v_2, …, v_n} is the scalar quantity u * v = u_1*v_1 + u_2*v_2 + … + u_n*v_n
this is what i have
yeah thats one definition for an inner product
may i suggest using something other than {} for containing coordinates in a vector
even () or [] would have been better
nah dot product refers to the "standard" product
inner product is what's more general
Why is $\mathcal{P}(\mathbb{F}) = \mathbb{F}[x]$?
LINEAR_ALGEBRA_GUY
it was @empty copper I think?
P(F) and F[x] are... different notations for the same thing? if i understand you correctly
does that answer your question
Isn't that the powerset, though?
not unless it's specifically been stated as such
So they're just using mathcal P for fun???
your book should have introduced both notations
Even though that always represents the powerset?
@dusky epoch For example, $\mathbb{F}_2[x]$ means polynomials with coefficients in F mod 2, right?
LINEAR_ALGEBRA_GUY
Yeah well look at this

you don't use powersets often in LA, and even then
there's a different notation for 'em which doesn't clash with this even apparently
if you want you can write sth like $\mathbf{F}[x]_{\leq m}$ for the same space! notation really doesn't have as much weight as you're putting into it!
Ann
what matters is that both you and your audience understand what stands for what
How do I show that $\mathbb{F}[x]$ is infinite-dimensional?
LINEAR_ALGEBRA_GUY
show it has arbitrarily large LI subsets.
linearly independent
yes
show that for any n there exists a linearly independent set of n vectors in F[x]
How do you do it without using linear independence?
Using span?
and what's the defn of a finite dimensional vector space?
one that has a finite spanning set?
A vector space is called finite-dimensional if some list of vectors in it spans the space.
okay then you can show that no finite list of polynomials spans F[x]
finite
you might find it handy to make use of the notion of degree
What about degree?
which F[x] comes with
Polynomials $P(\mathbb{R})$ can be spanned by $\beta = {1,x,x^2,\dots}$
this is an infinite list, and being spanned by an infinite list says nothing
also we're not considering the space of polynomials up to a certain degree, we are considering the space of ALL polynomials
bacon prince
Now I'm confused
i was responding to bacon prince there, sorry
anyway
i gave you a hint there.
your roadmap for the proof is:
consider a finite list of polynomials in F[x]. show that it cannot span all of F[x].
to show a list does not span a space, one good strategy is to produce a vector in the space which is not in the span of the list.
Yeah seems impossible since even something like f(x) = ax can reach every point in R^2
For different values of a
?
??
that has nothing to do with this
the graphs of polynomial functions don't matter at all here
Why not? Isn't the span what points we can reach?
in F[x], a polynomial is a point
What??? How?
"point" and "vector" are more or less synonymous in linalg
and a vector is just something that lives in a vector space
and here your vector space is F[x]
its elements - its vectors - are polynomials themselves
Okay... how would you represent them graphically?
but what is F[x]
The set of polynomials with coefficients in F
oh
?? What did you think it was
I had my doubts 
What did you think it was?
Okay... how would you represent them graphically?
you would not
not all vector spaces have dimension 2 or 3
and not all vector spaces admit a clear graphical representation
I did think it was polunomials over a field, but it was weird as the notation I use is $P(\mathbb{F})$
especially not ones over fields like F_p
bacon prince
@dusky epoch F_p is easy to represent graphically as discrete points?
well good luck trying to make a graphical representation for something like F_7^100 lmao
thatll be a lot of points
L_A_G what are you looking for here exactly
Can you explain this proof
I understand up to the first Thus
so you understand that everything in the span of your list has degree ≤ m?
Yes
bacon prince
this is wrong
not all polynomials are monomials
and also youre taking way too high a degree there
the former is more serious than the latter
anyway youre not helping
@wintry steppe what is the degree of z^(m+1)?
m + 1
so, do you understand why z^(m+1), a polynomial of degree greater than m, cannot be in the span of your list?
No because as I said even something like ax can reach any point in the plane for different values of a, and single variable polynomials are only in F^2
what the hell are you talking about
we don't give a shit about F^2
we're not working in F^2 we're working in F[x]
every point - every polynomial - in the span of your list has degree m or less
z^(m+1) has degree m+1
m+1 > m
therefore there's no way z^(m+1) can be in the span of your list
how is this not obvious?
We don't give a shit about F^2? But do you disagree all polynomials of one variable are in F^2?
yes i disagree, because a polynomial shouldnt be identified with its corresponding polynomial function
or its graph
Don't understand this sentence. What are you talking about?
alright let me start over
let's take our field to be the real numbers just for the purposes of this
and take the polynomial x^3 - 2x
ok
the polynomial x^3 - 2x can be considered as a function and graphed, giving this curve
this curve is a set of points in R^2
some of the points on this curve include (0,0), (1,-1) and (2,4)
agree?
may i ask something or would i be interrupting
I agree yes
I never said that it did
single variable polynomials are only in F^2
all polynomials of one variable are in F^2?
see this is something that has nothing to do with F[x] as a vector space
you're trying to think of polynomials in terms of their graphs
No this is what I am thinking
Each element in F[x] has a graph
And if we pick like z^(m+1) from F[x]
Then every point in the graph of this polynomial can be reached by ax, for example, for different values of a
But the way to think of the span is the points that each element can reach when multiplied by a scalar.
bad wording
you're working in F[x] not in F^2
your points aren't points in F^2
your points are polynomials
your points are elements of the vector space youre working with
for example, x^3 - 2x is in the span of {1, 5x, 3x^3 + 9}
Why is it in the span of that?
$x^3 - 2x = \frac{1}{3} \cdot (3x^3 + 9) + \paren{-\frac{2}{5}} \cdot 5x + -3 \cdot 1$
Ann
x^3 - 2x is expressible as a linear combination of 3x^3 + 9, 5x and 1
and in that image above i did just that
if you want, i can explain how exactly the proof's argument works with this particular list
Yes please
the value of m as defined in the proof is 3 for the list {1, 5x, 3x^3+9}
thus the proof argues that {1, 5x, 3x^3+9} cannot span R[x] because x^4 is not in span{1, 5x, 3x^3+9}
Alright thank you ma'am
Give an example such that L is onto and one to one and linear
when i say p(x) = x
i think it's satisfied
How is that a map from P[F] to F^inf?
there should be a fairly natural choice of map to take
write out an element of each side
write what an element of P(F) looks like and ask yourself how you can turn that into something in the set on the right
if you think hard enough there's a very simple choice of map
PF looks like ax+b
maybe you can do the simpler case of, say, nth degree polynomials and F^(n+1)
are you sure?
What about x^2?
and that's not what you're working with
you're working with P(F)
presumably the set of all polynomials
how can you even construct a function from P(F) if you don't know what it is?
that's why i said write out an element of it ;)
can you show us your definition of P(F)
the set of polynomails in max 1 degree
yeah you still haven't given a definition of P(F) so i don't know what to say
id assume it's "all polynomials with coefficients from the field F" but i want you to verify that yourself
(where "polynomials" refers to polynomials with all but finitely many coefficients zero)
maybe check the back of the book? is there a list of symbols/notation?
@errant cedar It would be better if you see the previous chapters where he tells about polynomials as vector spaces and the standard basis of them
In 3.34, he already expects you to know all that.
what book?
it's axler
so a 3x1 matrix is a linear map from a 1 dimensional space to a 3 dimensional space. if you write out rank nullity, you'll see that
rank = 1 - nullity
in which case it's either 0 or 1
(one way, not the only way, to see it)
the more straightforward way would be to just notice that the image of a 1 dimensional space will be of dimension <= 1
both work
when presented with something in finite dimensions (or with matrices) i like to see what rank nullity tells me, it's very powerful
maybe a technique worth keeping in mind
do you really need rank nullity to see it, it is just 1 column of matrix and that is for sure linearly independent so rank =1. Or am I wrong?
yes But P(F) is in form ax+b yes
?
nah you don't need rank nullity, i gave an elementary way to see it after using rank nullity. it could be zero (eg all entries zero)
yeah, I get it
what are u thinknig about that
if u give an example
i can understand maybe
@errant cedar go to 2.12 definition
OOOhh
wtf did i think until now
could you take a screenshot of the question? feels like this might be entirely trivial lol since the third and fourth lines seem to imply that the null space of B is just the image of A (and image = column space...)
absoulutly
yeah i think just like, ||the null space of B is the column space of A,|| so you're done
i think you're mistaking the size of a vector and the dimension of a vector space
B is a 3 by 5 matrix so the elements in its image/column-space will be 3 x 1, but it's null space will consist of 5 x 1 (i.e. vectors with 5 entities)
and the dimension of that will mean something different than the size of the vectors in it
Let V be a finite-dimensional and W an arbitrary vector space over F.
and L ∈ L (V, W). Show that there is a subspace U of V such that U∩kern (L) = {0}
and image (L) = {Lu | u ∈ U}.
x^n+...+x^2+x+1
is it work
So I have V = R[x] the space of all polynoms with one variable and coefficients from R
U = {p(x) in V | p(0) = 0 }
now, it's clear to see that this means that this is all the cases where the last coefficient isn't 0
so anx^n + ..... + a1x + a0
but how do vectors from V or U look like? I'm a bit confused on that
are the vectors just the coefficients?
like [an, a(n-1)...., a1, a0] ?
similarly, how would a linear transformation look like from V->U?
they are literally just the polynomials. "vector" in this case means "element of a vector space"
The vectors are just what you say they are - polynomials. They're only sets of coordinates with respect to some basis... though a good exercise is to try and figure out exactly which basis you're subconsciously referring to when you reference those coordinates
all polynomials can be uniquely defined by their coefficients
"It's clear to see that this means..."
I think you mean where the last term is zero.
really?
Wait, is that not true?
I'd like to know @_@
or did I forget to mention
variables and coefficients
yeah,
So basically, I'm tasked with proving that U and V are isomorphic
from my understanding, if I can find a T s.t it's bijective, that proves they're isomorphic
is using the identity function, except in the last term, meaningful here?
so T(f) = { f(an), f(a(n-1))... ,f(a1), 0 }
so for T(3x^2 + 2x^1 + 3) = 3x^2 + 2x + 0
this would work since p(0) = 0 as needed for U
the issue is that it's not bijective since 3x^2 + 2x^1 + 3 = 3x^2 + 2x^1 + 4, as an example
it would work for anything in the last term since I'm mapping it to 0
am I making sense here at all? >_>
Going to assume I was coherent;
so I need to find a way to make the last term meaningful, I tried to multiply everything by the last term but:
T(3x^2 + 2x + 3) = 3(3x^2 + 2x ) = 9x^2 + 6x
T(9x^2 + 6x + 1) = 9x^2 + 6x ... still not bijective
p much if you find a linear transformation that is a bijeciton then by defintion it's isomorphic.
Go ahead keep typing
I'm just reading
I have another idea
Yea you're making sense
which is to map everything to the the derivative of n+1 divided by n+1
I mean one easy way of showing this is just showing that the two spaces are of equal finite dimension
But you're probably going to find that they're not.
Which is why you're having trouble of finding such an isomoprhism; it doesn't exist.
Do you see why?
the assignment tells us that there is one
so maybe I didn't write something correct?
"prove U and V are an isomorphism"
I'm struglging to see there is. Beacuse if I'm understanding what you're underlying sets are correctly then we have that $R[x] = { p(x) | p(x) = a_1 x + a_0 , a_1, a_0 \in R }$
TheDon
like if that's the case that subspace has dimension two because a basis for that space is $\beta = {x, 1 }$ and for the other space all you need is $\alpha = {x }$
TheDon
If that's those are the sets that you're talking about, then there can't be an isomorphsim between them.
But maybe I'm misunderstanding the sets your talking about.
All polynomials of one variable
That's a huge set
It's basis is infinite dimensional
There's no way there can be an isomorphism.
it's basically all polynoms like a0 + a_1x^1 + a_2x^2 ... + a_nx^n
Yea, there's no way.
or maybe without a0 i'm not sure
Now if you want to show that there is a homomorphism between the two of them, then that's a possibility and you've already given it.
That wouldn't make any meaningful difference.
it says clearly isomorphism
The situation is still the same.
OK, so these are my instructions:
"There is a very natural transformation:
https://i.imgur.com/PpNL2Rn.png

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
There's a theorem that states that two vector spaces of finite dimension are isomorphic if and only if they are of equal dimension.
Oooooooh
nvm i completely misunderstood the sets.
This might be doable.
"...But this transformation isn't injective"
Yea it 100% is.
I know you can because the bases are both of countable infinite dimension.
So you could say that by a theorem; finding an explicit isomorphism is more difficult.
basically...
T(3x^2 + 2x + 2 ) = (3x^3)'/3 + (2x^2)'/2 + (2x)' = 3x^2 + 2x + 2
actually that's not good
since p(0) != 0
Instructions say: "Try 'fixing' the transformation so that it'll 'remember' the free variable, and won't 'delete' it"
on this
hmmmm
yeah, hard.
you see my previous issue?
Yes.
^
I tried to find a way to make a0 significant or something unique
Try this $T(a_nx^n +a_nx^{n-1} + \dots + a_0) = \frac{a_n}{a_0}x^n + \frac{a_{n-1}}{a_{0}} x_{n-1} + \dots + \frac{a_1}{a_0}x$ if $a_0 \neq 0$ and just what they gave you earlier if $a_0 = 0$
TheDon
That might work but I literally just came up with that on the top of my head
I tried that
Dang
so what if a0 = 0? then it is undefined
No
you just redefine it
you define it for polynomials where the last term is nonzero and then just make it the regualr map that they gave you for when it is 0
OK, I thought of that a little but
I got stuck trying to prove that this is indeed unique
That what's unique?
Even if you proved this, it wouldn't show it's a bijection because you have to show that it's surjective too.
YES
That's exactly what I was gonna say
lol
Provided that T the map is a linear transformation
Like T = { (something) a_0 = 0, (something else) otherwise
You need to make sure this transformation is linear first because even going about trying to show that the Ker = {0} because that'll be a valid proof method if the function is lienar
yeah, I'll prove it's a transformation
yea remember I said that you define it to be the transformation where you divide the last coefficient if a_0 !=0 and just the way that they said was a "natural" linear transformation for the case when a_0 = 0.
merry christmas my linear algebra people
OK, so hold up
M christmas 😄
I need to prove KerT = {0}
so that means that x = 0?
I'm probably gonna go out of my way to check that's a linear map because I have a feeling off the top of my head that it might not be.
yes
No that's right.
we need to prove T(f) = 0 iff f(x) = 0?
for which transformation?
@west spade it's so hard to explain simply lol
Yes
so in other words assume (anx^n + ... a1x1) / a0 = 0
For the case in which a_0 !=0 yes
a0 is always non-zero so we can get rid of it
that's not linear, consider x+1 and x+2 as your polynomials
so anx^n + ... ax = 0.. isn't that just our function?
and it's certainly not bijective
an indirect way to show it's not linear is that only one polynomial maps to 0, but the map isn't injective
if it were linear that couldn't be possible
Yeah I got a contradiction
why is this impossible?
if a linear map has two inputs that output some vector, you can do some arithmetic to transform that into two inputs that output 0
so the set of vectors that map to 0 will tell you all you need to know about injectivity
mm yeah
(this is all for finite dimensions)
@winged jay
.
well, I'm trying to think of what linear transformation can help keep the constant
that doesn't work sadly @half storm
Maybe multiplication would be the next thing I would think of off the top of my head
what exactly are you trying to find here?
this is the nutshell
a linear map from the space of polynomials degree n to itself?
not to itself
V-> U
where U is all p(x) in V s.t p(0) = 0
in other words the constant is zero
The set of all polynomials into the set of polynomials such that p(0) = 0; basically the set of polynomials with no trailing term.
what about it? that image is cut off
there's text explaining what V is thats all
and you're trying to show...
I'm trying to show U and V are isomorphic
where U is
the images here don't load for you?
U = { p(x) in V : p(0) = 0 }
V = R[x]
got it, my b
basically, I need to find a transformation
that's bijective between them
there is a transformation where you just keep everything except the trailing member, set to 0
got it
but then it's not bijective because, for example T(3x + 3) = T(3x + 2) = 3x
luckily in this case you're handed two bases to biject
forget about the polynomial structure, just strip the problem down
You have two countable bases so by a certain theorem you know that their isomorphic. But given that the bases are countable there's probably a way to find a bijection between the bases themselves that can lead you to the right answer.
so basically what @west spade said.
I don't mind doing something different, it's just that I'm a little inexperienced here; I have instructions in the question
^
I'm a little confused though
T(f) = { f'(an + 1) / n+1, f'(an-1 + 1)/n, .... f'(a0 + 1) }
maybe I'm writing it wrong but basically
OK, I don't understand something
3x^2 + 5x + 3 is not in U, right?
oh I get it
Right
T(3x^2 + 3x + 5) = 3x^3 + 3x^2 + 5x < why wouldn't that work?
It could
basically up all powers by 1
I'm going thru my head and I think it might work
T(5) = 5x
T(5x) = 5x^2
Sorry
Is integral not a linear map?
I mean it's not exactly integral
but it's the same concept
On the tablet
But it's not integration so it may not work.
Prove T(f) = 0 <=> f(x) =0, f(x) = anx^n + ... a1x + a0
side 1: assume f(x) = 0, T(0) = 0 by def
side 2: assume T(f) = 0, then anx^n+1 + ... a0x = 0
if x=0 => then clearly f(0) = 0
if x != 0 we can divide by x once =>
ax^n ... + a1x + a0 = 0 => f(x) = 0
So if you take two polynomials one of degree m and another of degree n, apply this map:
$p(x) = a_nx^n + a_{n-1}x^{n-1} + \dots a_1x + a_0$ and $q(x) = b_mx^n + b_{m-1}x^{n-1} + \dots + b_1x + a_0$
What happens?
@half storm we just need to prove aT(f) = T(a * f) and that T(f + g) = T(f) + T(g)
I think that works
What you typed seems to check out for me that if it's a linear map then it's definitely injective
the only thing I need help with is how to explicitly state that function?
You should show that it works first. But you've already stated what the functoin is
TheDon
I don't think I wrote ite correctly mathematically
For any $p(x)$ $\implies T(p(x)) = xp(x)$