#linear-algebra
2 messages · Page 150 of 1
@errant cedar just take a null space, and extend its basis in two different ways. What's that hard about it?
or you can take an example where the null space is 0. there are so many such linear maps that you can make with the given condition. Meditate on the nature of linear maps
not possible. if T has trivial kernel, then by rank-nullity, rank T = 5, impossible since rank T is at most 2
that's right. I made a mistake
happens to us all 
how is 1/x^2 a polynomial, you got that wrong

Its not looks hard but i just started to learn and dont know exactly how to do it
that I said wrong, don't think upon it.
if it's wrong then think upon why it's wrong 
yeah, read the previous message too
you could try doing something that effectively ignores the last three coordinates of F^5 and gives you something nice on the first two
@errant cedar
then the kernels of your transformations could just be {(0,0,x,y,z) in F^5 : x,y,z in F}
just some food for thought
one example || K(x,y,z,w,t) = (x,y) and L(x,y,z,w,t) = (y,x) ||
this is usually how things go wrong when mapping from a higher dimensional space onto a lower dimensional one

i did not know that i can ignore
well of course you don't have to
but it's nice to have simpler examples
i could have taken it to be projection onto the last two coordinates, for example
making good choices like these is how you can make these kind of exercises easier to digest/understand
than here is null(K) = null(L) and null(K) = (0,0)
i don't know why i thought clicking on the spoiler text in the message preview would unspoil it
no, that's not the correct kernel
you should be more explicit
let me make myself more explicit to help (previous message edited)
I did the same

if a vector in F5 (x,y,z,w,t) is mapped by K to the zero vector 0 in F2 (which is (0,0)) then
K(x,y,z,w,t)=(0,0)
(x,y)=(0,0)
so for an element in F5 to be in the kernel then x=0 and y=0
to find a kernel you can always set the entries of the transform of a generic vector to zero
lol, is it all residue calculations
ill post it in #real-complex-analysis
if its a more complex transformation then you may have to set up a system of equations to solve for the kernel
i wish i could do 7 pages of complex analysis instead of being 7 labs behind in my physics lab 
complex analysis is just busywork that i have to get done so i can get to the classes of mine that are actually interesting
at least, that's how it's been the past while
can you give an example
K(x,y,z,w,t)=(0,0)
(x,y)=(0,0)
so for an element in F5 to be in the kernel then x=0 and y=0
K(x,y,z,w,t) = (x-y+z-w+t,0) L(x,y,z,w,t) = (-x+y-z+w+t,0)
when i say like tihs
is null(K) equal to null(L)
?
read the pinned message, this is not linear algebra
My apologies
What is the process for solving this?
<@&286206848099549185>
A ping would be nice if someone can help 👍
I don't know how to find the linear combination for a single number when three equations are involved but basically I have to solve:
0 = a(2-x+x^2) + b(2-2x+x^2) +c(-3+3x-2x^2)
1 = a(2-x+x^2) + b(2-2x+x^2) +c(-3+3x-2x^2)
2x = a(2-x+x^2) + b(2-2x+x^2) +c(-3+3x-2x^2)
3x^2 = a(2-x+x^2) + b(2-2x+x^2) +c(-3+3x-2x^2)
I got the first two by checking and guessing but there has to be a better way to do this right?
it'd make your life a lot easier to write whatever that is as a matrix equation, for one
This is what the problem actually looks like
But the process is essentially the same. I'm stuck finding a linear combination that involves three variables
Edit: I understand it now
Give two linear maps L_1, L_2: F ^ 2 → F ^ 2 such that L1 ◦ L2 not equel to L2 ◦ L1
Do you have an idea about it
think of it in terms of matrix multiplication
after that think of some simple examples, matrices with 1s and 0s
if that vector is a steady state vector then it is an eigenvector with eigenvalue 1
assuming they want the columns to add up to one then there is something else that we know
A^T (1,1)=(1,1) so (1,1) is an eigenvector of A^T with eigenvalue 1 as well
notice the fact that the columns sum to 1 implies (1,-1) is an eigenvector of A
$\begin{bmatrix}a&b\1-a&1-b\end{bmatrix}\begin{bmatrix}1\-1\end{bmatrix}=\begin{bmatrix}a-b\b-a\end{bmatrix}$
nix
so we know two eigenvectors of a 2x2 matrix
we can then do a diagonalization
$A=\begin{bmatrix}\frac{15}{29}&1\\frac{14}{29}&-1\end{bmatrix}\begin{bmatrix}1&0\0&\lambda_2\end{bmatrix}\begin{bmatrix}\frac{15}{29}&1\\frac{14}{29}&-1\end{bmatrix}^{-1}$
nix
then you just have to pick some lambda2 with absolute value less than 1.
@copper stratus thats how id do it anyway
@hollow finch Is this for me?
yes
Ah, I was confused for a min'
sorry i thought jh was trying to help you
you could also do
$A=\begin{bmatrix}15&-1\14&1\end{bmatrix}\begin{bmatrix}1&0\0&\lambda_2\end{bmatrix}\begin{bmatrix}15&-1\14&1\end{bmatrix}^{-1}$
nix
that may make the calculations slightly easier but it doesnt make a big difference
some other neat things to note as long as |lambda2|<1:
the bigger lambda2 is, the slower the system will converge to the steady state vector
if lambda2 is positive then the sequence will steadily approach the steady state vector
if lambda2 is negative then itll bounce around the steady state vector like an alternating series
just in case you want to test out how the matrix looks for different values/situations
its definitely the kind of thing i like to do
its far harder to find two linear maps where L1 ◦ L2=L2 ◦ L1. if you just make them up randomly the chances are high that they will satisfy that.
far harder
just take L1 = L2
<@&286206848099549185>
if $y_i=\sum_j A_{ij}x_j$ then $\frac{\partial y_i}{\partial x_j} = A_{ij}$
Timon
all the terms on the rhs for $\bar{h} =\dots$ are equivalent to one matrix multiplying $\bar {x}$
Timon
ok, so i need to move for each value and derive?, but what does having both the uper and under index mean in -W
it means the matrix squared that is $W^2_2 = W_2W_2$
Timon
dimension=rank+nullity
Anyone up to help me finding a linear transformation from this:
-R3 to R2
-T(1, −1, 1) = (1, 0)
-T(1, 1, 1) = (0, 1)
ah ok, thank you
Try turning it into a matrix equation
actually I am supposed to use the fact that (A^2+B^2) = (A+iB)(A-iB) to proceed
as I am unaware of diagonalization (I am in HS)
Would you mind posting a picture of the question
Consider (A + B)², which has a positive determinant
I don't think that's valid considering we are talking about Mn(R) and not Mn(C)
why it's not valid
det's domain is Mn(R)
It's possible to get going, but will need more work.
Plus, probably not the easiest way to go about it
det is a function from Mn(R) to R.
Huh. I'll have to think on that
okay thx
btw I think since n=2, using the fact that det(A+B) + det(A-B) = 2(det(A) + det(B)) might be useful
That's not true
for second order square matrices?
yea generally it's not true, but it is true for second order square matrices
Oh haha, yeah M2(R) may be making all the difference here
As the first question asks about n×n matricies
det(A+iB) and det(A-iB) are conjugates
I am very confused on how to prove this if I have two sets X and Y and a field F, then I can't able to make an isomorphism between F^(X ⊔ Y ) and F^X ⊕ F^Y . I am trying to show they are isomorphic
can someone explain how this transformation matrix was made? https://i.imgur.com/3zHQYcX.png
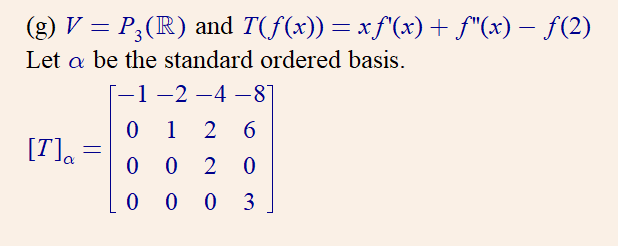
P_3(R) comes with the basis {1, x, x^2, x^3} presumably
so they just, yknow, constructed the transformation matrix as you normally would
applying the transformation to each basis vector and writing those as the cols
does anyone know how to find a solution to the following nonlinear matrix equation
$$[A]X^2 + [B]X + f = 0$$
Where $[A]$ and $[B]$ are 2x2 constant matrices and $X = [x_1, x_2]$ and $X^2 = [x_1^2, x_2^2]$. Also, $f$ is a 2x1 vector. I could do this easily using simultaneous equations, but I wanted to know if there was a way to solve this using matrices.
The Smelly Cherry
any thoughts?
ah just a question about notation
if we denote a function f : S to F where F is a field, when we talk about f(x) is that an element of the field?
Yes
And when we just talk about f, that's a more abstract thing
that's a member of the set of functions from S to F, while f(x) is not
Yes. f is the function, f(x) is the output of the function which comes from F
thank you
- Differentiate with respect to x: 2sin 2x cos 3x
can some help me with this
then....

is there such thing as a stochastic matrix that does not enable x_k to approach some steady state vector q?
theres a theorem stating every regular stochastic matrix must enable to this to be the case
but the inverse doesnt seem true, as the identity matrix appears to be an irregular stochastic matrix, but still has a steady state vector
in fact every vector is a steady state vector for the identity matrix
ooooo
nvm
i found one
for 2x2 for instance, r1: 0 1 r2: 1 0
would work
😈
Does anyone have some steps in order to find the neutral element for addition, addition being □ depending on the following conditions
Let V = (2,∞). For u and v that belongs in V [...] we can define the internal addition operation such as :
u □ v = uv - 2(u + v) + 6
i don't know how to manage to cancel u on both sides of the equation to just be left with v
you're not talking to me hopefully aren't you o_o
Yes,I am talking to you
Also,This belongs in #proofs-and-logic
?
uh... i forgot to mention but those are vector spaces..
ah im big dumb nvm nvm
anyone wanna join the VC and help me and my boi out with a basic ass linear algebra question
we struglging haha
$\int_0^t e^{(t-u)A}\vec{v}(u), du=\int_0^t e^{uA}\vec{v}(t-u), du$
nix
is this a valid change of variables where A is a matrix?
or does the fact that A is a matrix make it wonky
wait is this a convolution? o.o
idk if I'm in the correct section but how do I solve this?
That is not linear algebra
@hollow finch what is this then?
ok thank you
I believe the change of variables is still valid. I think pretty much all properties of integrals generalize to these settings with vector spaces
Hey cud someone pls explain why only that option is right?
Okay thank you :)
No problem
The explanation for b and d being incorrect is similar. Are you confused by one of those or a?
I just don't get why a b and d are not valid :(
Yeah b and d only require a counterexample
Starting with b, can you think of a vector which is orthogonal to every vector in Rn?
Not really no...
It's the one everyone forgets about
0?
Yeah
Ahh I thought 0 vectors are always diacarded
No you still have to invite the zero vector to the vector space party even if it's a buzzkill
Oh kk that makes sense, n what about a then🤔
Cos if U is a subspace of Rn shouldn't U'contain everything else in Rn
a is false
in R^2 the orthogonal complement of the x axis is the y axis. their union clearly isn't R^2
How though? 🤔
you might've conflated union & sum of subspaces
Oh I see. But the span of the union would be Rn right?
I haven't exactly learnt to sum subspaces😅
sum of subspaces U & W is defined U+W:={u+w: u in U, w in W}
span of the union would be Rn
yes
Ah ok, so what would be an example of a vector that lies in Rn but not in this union?
(1,1)
Ahhh so the in between regions are not covered
visualize the union of the x & y axes as the fence between quadrants. there are many pts off the fence
Riiight I think it's kinda complicated to think abt it for over 2 dimensions but alright I'll give it a think
Thanks so much both of you!
you're welcome. also a nice exercise is to prove c is true
Can someone explain to me simply what a dual basis is? I don't really get it
the kth dual basis element just specifies the kth coordinate of a given vector in the basis
that statement is very concisely summed up by what you'll often see written as $e^i(e_j) = \delta^i_j$, where the $\delta$ is the kronecker delta, the $e_j$'s your basis, and the $e^i$'s the dual basis
TTerra
so for example the 3rd element of (1,1,1) in the canonical basis would be the third element, also a 1, in the dual basis?
each dual basis element, where the dual basis is dual to the canonical basis (im assuming this is in R^3), will indeed send that to 1
in a few minutes i can type something that expands on the first thing i said
thank you
TTerra
i should point out two things
- these are really ordered bases, so if you tend to make the distinction, note that i really do mean ordered bases here (else, how would any of this make sense)
- using upper indices to denote dual space elements is a differential geometry thing, i don't know how common it is in LA books (also at this point i should have used upper indices on the coefficients of v too
 )
)
wow thank you man
that's a bit long but i hope it can clarify the definition a little
the process for getting the eigenvalues of a 3x3 matrix is the same as a 2x2 right?
just gets more complicated because taking the determinant is harder?
I have two (possibly infinite dimentional) linear maps T and S on some space H. I know that T = T* and S = S*, and I want to show that if <T(v), v> = <S(v), v> for all v in H, then T = S.
Since f is infinite dimentional I can't just plug in orthonormal basis vectors and show that the entries must be equal, unfortunately
Bro I have no idea how to do this problem, I and some of my other classmates think it is not possible can anyone help?
A brief description and guide on how to use me was sent to your DMs!
Please use ,list to see a list of all my commands, and ,help cmd to get detailed help on a command!
Please give me something to evaluate.
See ,help calc for usage details.
@shut falcon it is possible, but read the pinned message; this is not linear algebra
I know that i couldn't find any other chat.
this is not the chat though
maybe one way to get started is by re-writing the given condition as <Tv - Sv, v> = 0; i think that'd be fruitful
well it's not much
but i feel like you can do some funny cauchy-schwarz thing
||especially since (x,y) \mapsto <(T-S)x, y> is an inner product sometimes (always?)||
complex has infected my brain
hehe
schwarz has quite a few things in that field
schwarz lemma, schwarz reflection principle
i'm thinking that ||if the thing i described is an inner product then |<(T-S)x, y>| \leq <(T-S)x, x><(T-S)y, y> = 0 so by whatever argument makes sure this is actually an inner product, i.e. nondegenerate, you get T = S||
just throwing ideas out there
i only know christoffel for christoffel symbols and i'm not sure anything can top those 
I love the schwarz-christoffel mappings
they're very cool
there's also the tensor named for him
I forget the other guy
oh lol, it's reimann
reimann-christoffel tensor
last row affects nothing
middle row is v2 = 0
top row gives that v1 = v3
and they set it to t
so were allowed to make v3=t because its all 0
yea I still cant apply that reasoning
dont get it
v_3 is a free variable since the 3rd row is all 0's
so we let v_3 = t
then you have v_1 - v_3 = 0 from top row
so v_1 = t
and the only way 2nd row is true is if v_2 = 0
Thus the v vector is t[1,0,1]
alright
what math am I doing wrong here then?
every calc I give this matrix gives me diff eigen vectors
and my own math hasnt produced the right answer either
pls
@mild igloo so if A(v) = -9v = -9(a, b, c), from the matrix we get
A(a, b, c) = (9c, -5b, 9a)

Why is (x,x,y,y) + (x,x,x,y) = (x,x,y,z)?
what?
that's an addition of sets there
I know
it's absolutely not the case in general that (x,x,y,y) + (x,x,x,y) = (x,x,y,z), you should try proving that equality by showing each set is a subset of the other
Why did the third coordinate become a y instead of an x, for example?
well you can think of it like this: when you take any element of U, say (a,a,b,b), and any element of W, say (x,x,x,y), then when you add you get (a+x, a+x, b+x, b+y). the first two coordinates are the same, which is represented in set builder notation using the dummy variable x by writing the first two coordinates as the same. the third coordinate, represented in set builder notation using the dummy variable y, could be anything
these are all dummy variables
i strongly suggest writing out a proof as to why that equality of sets holds
so you can see that the x's, y's, z's are just placeholders
Ok. Would it be too much to ask for help writing that proof?
i can't help out with that right now, sorry
i really think you should try it yourself
generally it's a good idea to verify or think about the examples you come across, and get proficient at doing these "mini exercises"
well how do you find the jordan form of a matrix
@half forge I think the question is quite clear, do you know how to find the Jordan form
im assuming your teacher gave a lecture on jordan forms if you are given that kind of homework problem
do you have notes?
have you looked at your textbook?
that's just matrices, you won't be able to understand the algorithm with that
to figure it out, you need to understand the theory behind it as well
that image looks more like a calculator!
the jordan form of a matrix is given in a block pattern based on how defective each eigenvalue is
theyre called jordan blocks
so lets start with the eigenvalues. theres only one of them so it wont take that long
whats the geometric and algebraic multiplicity
Is there such thing as a matrix for which repeated application permutes through the whole space?
what do you mean by permutes through the whole space?
as in, you can reach any vector by applying the matrix a certain number of times to some vector?
or such that you can reach any matrix of the same size by taking powers?
both of those aren't possible, at least over the reals (uncountable spaces)
like a matrix M when applied repeatedly to [1, 2, 3] gets you something like: [123] -> [231] -> [312] -> [321] -> [213] -> [231]
Which are all the permutations of [1, 2, 3]
I'm thinking it's not possible because 123 -> 321 is a different kind of matrix then 123 -> 231
So you always need two different matrices
I can see what you mean. For that you can define a vector space as a set X={1,2,3} on the field F . Then you can define isomorphism from F(X) to F(X)
there will be total 6 such matrices
ah yes just take the 3 element field 
and these 6 matrices will form a group under matrix multiplication
@wintry steppe Am I saying wrong?
Kanishk
i'm not quite sure what you mean by "on the field F" and by F(X)
but i'm liking this idea
@tame mural if you're comfortable with basic abstract algebra maybe you can try looking into connections between finite matrix groups and symmetric groups
i don't know much algebra though so i don't know if you can say anything significant
kanishk may be on to something though
For this case,M doesn't exist. As M is a permutation of cycle length 1,2 or 3,M^k(v) can cover a max of 3 vectors
If you can find integers $a_1,a_2...a_k$ such that $a_1+a_2+a_3...a_k=n$ and $lcm(a_1,a_2,...a_k)=n!$ you have your required matrix
DrunkenDrake
S_n is not cyclic for n>2 so no(
(12) and
(13) are 2 different subgroups of order 2 for n>=3.
n=1 and n=2 are trivially cyclic)
I see, thanks
So the number of "generators" I need = the number of matrices
and the symmetric group isn't 1-generated
sad

What else do I know about the basis vectors???
......
i guess i can conclude that there also live inside V.:
Every basis of null(T) can be extended to a basis of V
Okay. Yeah. I was hoping to get there....
I just don’t know how to do that.
i know the basis of null(T) is linearly INDEPENDENT in V?
That makes intuitive sense....but I don’t know if I can prove it directly....no matter.
How do I know I can start adding vectors to the list of basis vectors?
Like, okay, how?
Is this by like a set theory axiom where im allowed to form set unions?
@dreamy iron If we are talking only about finite dimensional vector spaces, then look here
That feels right: I take a new vector in V and that that as a singleton set and Union it to the basis set.
LOL, Im in AXLER TOO
Is induction in the under belly of all of these proofs?
(That’s the thing about Axler, he does induction but doesn’t declare that out right.)
I think the proof of 2.31 uses induction. Namely, I think you can prove it by proving by induciton that for all j, there exists a subset of {v_1, ..., v_j} which is a basis of span({v_1, ..., v_j}).
Hi, could someone help me understand a bit of notation?
The Er, Dr, Dc
Please @ me if responding, thank you
@brittle orchid just from looking at the picture it looks like it's describing the row or column operations going on
for example
in the first line try comparing the row operation going on with the thing under the arrow
the notation is kind of pointless, it just seems confusing and cluttering
I understand that the notation may not be ideal but I believe that we are required to present our answers in a particular way for university therefore I think I have to understand what this means
like maybe the letter is the type of elementary operation, the subscript whether it's a row or column operations, and the arguments determining what happens to what row/column
why not just ask your instructor then
well, I've sent him an email requesting for an appointment
what's with lin alg profs and using wacky notation
I knew a lin alg prof in first year who made up all his notation
today we're gonna denote change of basis matrices using the clunkiest notation possible
literally 0 notation used in his course was widely accepted notation
it was extremely idiotic
i cringe a little every time i see the change of basis matrix notation with like, a backwards arrow between capital letters under a [I]
I mean I wish they would at least topics of Algebra at the same university with relatively consistent notation
it's so.... clunky
oh lol, I've seen that
but it also doesn't help that last year I was slacking 😄
consistent notation is a myth, but there's definitely such a thing as bad notation
idk, i feel as if just the arrow with R2 -> (whatever) is perfectly descriptive
it's concise and captures 100% of what's happening
$\bR^{m \times n}$ is how people normally denote the space of m x n matrices, but this prof had to use some garbage like $M_{m,n}$
PorosInMyAshe
🤢
and that was some of the best notation he used
well yeah then you get the students who are like but isn't that technically R^(mn) 
I think the Er (i, j, k) means multiply k times row j and add it row i or something
E_x (i, j; k) seems to mean [x] i = [x] i + k * [x] j
where x is r or c
[x] is row or column
based on what x is
D just seems to be multipying a row/column by some constant
use D for multiplication
ngl E almost reminded me of elementary matrices
almost like elementary row and column operations correspond to elementary matrices
pff
Btw does this fall under linear algebra: real canonical form and complex canonical form?
no? canonical form means something different than this
row/column reduction usually falls under "reduced (...) echelon form" i guess
this isn't RRE though
if you saw the image
it was 1 or 2 steps from real canonical
im a little hesitant to say for certain since ive never actually seen row or column operations used simultaneously
They're fairly similar, they've just got double operations instead of single
same to ttera
real canonical form is almost identical (visually, at first glance) to RRE with 2 operations happening simultaneously
at least to a noob like me
😄
in my mind "canonical form" usually refers to something obtained by and related to the characteristic polynomial
but "canonical" is also one of math's many overused words
idek what it means it's just algorithmic imho
you can study all of this from a non-algorithmic point of view; the theory behind linear algebra is very nice 😌
if only that were the norm
tbh I have hated my Maths department for a long time and as a result I wanna get done with my degree asap 😅

sorry occupied
lmao
ok
so can we prove this
using that every odd degree polynom has root in R
thats how id do it
when it says "has an eigenvalue" does it mean a real eigenvalue?
yes, you can intuitively think about it as an odd dim matrix, which has a characterstic polynomial that is odd, so it must have a real root
IVT ftw
f(6) = 9 , f(-5)=0 can someone explain how to solve this please
that is not linear algebra
$\frac{f(b)-f(a)}{b-a}=f'(\xi)$
(i need to formalize it but still)
the "better way" to prove it is via induction
however
you can trivially prove it for dim V = 1
well yes
and you can do induction on every "next" odd dim space
it doesn't say the operator is a matrix
which is why I would steer away from the characteristic polynomial proof
it's still possible to do it that way
but it's not as clean?
we already showed one two one corresponednce between linear maps and matrices tho
ya, I mean I know it's easy to do, it's just not the "cleanest" of proofs, for lack of better words
it's not wrong
and like he does not really use char polynomial
but it's better as a way to think about it rather than to prove it
characteristic polynomial makes it intuitively obvious but yea induction is probably cleaner
i mean he does not derive char poly itself
he just says "we can use polynomials with operators"
axler avoiding characteristic polynomials
privyet MVT
wotsup ttera
btw @wintry steppe
today we had quiz on series (and a bit of double integrals)
everyone: doing stuff through pain
me: ok calculus
10 mins later: i am done
Looking for some guidance.
Let S,T:V->V be linear transformations s.t Ker(T) = Ker(S) and Im(T) = Im(S)
prove S=T
My incomplete proof: if T(v) = 0 then v in KerT, therefore v in kerS, therefore S(v) = 0 and vice versa
so T=S when the result is 0
but I'm struggling to use Im(T) = Im(S) to get another equality like this, any guidance?
If the domain and image are the same, then the function is the same, isn't it -_-a?
well I need to prove it
lol
ideally using actual linear algebra and not just general sets
No that's not true in general. Consider R → R, S = |x| and T = x²
Have same domain and image but aren't the same
Right
Now, yours is different because the nullspace is also the same
And these are linear operators
I know S=T, I'm just struggling to prove it
Basically for any v in V if T(v) = 0 then S=T for these v in V
that's easy
but T(v) = w and S(v) = w'
proving w=w' is hard
or alternatively
T(v) = w, S(v')= w => v=v'? not sure if that's correct
no
what if w is the zero vector?
v and v' could be different vectors in the kernel
w != 0 because I've dealt with 0 in my incomplete proof but yeah
maybe proof by contradiction would work
I have tried, but just came up with an idea
Wait, the proposition isn't wrong, is it?
what proposition?
Are you sure it's correct?
For A = [1 0; 0 1] and B = [2 0; 0 2]
Don't they have the same domain and image?
And nullspace?
I'm not sure it's correct
I'm a noob too so don't take my ideas too seriously
I think so but 🤷♀️
but A and B are clealry different functions...
but if you're sure your teacher isn't going to throw you a trick question
then I'm not sure
the functions can be different in implementation what matters is that f(x) = g(x) no matter what x you throw at it I guess
but let me check your example
Good counter example, the prop doesn't seem to be true
Why is that example false?
S[x,y] = [x, y], T[x,y] = [2x, 2y]
KerT = {0} = KerS
ImT = R^2 = ImS no?
A is the identity
B is the operator that doubles a vector's distance from the origin
Clearly null is trivial
And range is all of R²
For both
yeah edited
ah
I see
so for [1, 1]
S[1,1] = [1, 1] and T[1, 1] = [2, 2]
man
I've been sitting on this for an hour trying to prove it instead of thinking of a counter example
I see now, that's why counterexamples are useful
then you'll save work if you're doing the wrong thing
😄
sometimes you get stuck with a stupid idea and just can't see you're wasting time
Oh it was a true/false wasn't it?
I was sure because I used the KerT incomplete proof there must be a way for ImT
honestly, I didn't notice it was a T/F... I just saw "prove"
Does the cayley graph of a symmetric group always have a hamiltonian path?
Given the 2 generators you need
such as an n-cycle and a transposition
And is it easy to find?
you should probably @ the helpers if you still need help with your question
Is anyone able to explain this to me ? Or link a YouTube video that shows me how to answer it ?
I know what an orthonormal basis is but I don’t really know what this question is asking and how to do it
an orthonormal transformation is one that doesn't change the "angles" or the "lengths" of your world
So if you had a unit cube in your world, that cube wouldn't get stretched or tilted
They want you to use a combination of the vectors in B
to reach w
Oh@got you thank you for deciphering that lmao
B is called an orthonormal transformation because every vector inside is length 1 long
And because every vector is "orthogonal" to every other
Yeah I got that part, so how do I go about going from B to W ?
You can imagine this as a systems of equations
Okay
RREF should get you the answer for problems like this
RREF(B augmented with w)
Yeah you look like you're on the way to getting the answer
And just rref it ?
It’s because i have a classmate and I’m looking at his work and he did something different so I’m just double checking
Well one thing I'd check is if your classmate did anythign with orthognoal projection
that was imo the one slight ambiguity in the question
if your classmate did, then I'd be suspicious of misreading the question
Ohh hold on lemme show you his stuff
This is just a study guide so it’s not a test or anything cheating
but otherwise you haven't finished your RREF
I'm not near my normal computer
so I can't check it
Yeah but I mean he diddnt do rref at all
There are often many algorithms to the same answer
Ok cool
You got it?
I felt that lol
Coincidentally the numbers are similar both ways
I'd check out why your friend did it different
that could be the way your class wants
Yeah I have no idea but your way was way easier and we both got the same as the teachers answer
I'm trying to find a linear map T on l^2(R) -> l^2(R) such that T* (the adjoint) doesn't exist. Is there some well known example of this, because I'm really struggling on this
My thoughts were that clearly T would have to be unbounded, so there's probably some thing with picking a countable set out of the basis and defining a linear map using that.
can someone help me with this one
its a true or false question but im not understanding it
if someone can walk me through it since im not sure how to start it
My intuition is the answer is false, but I'm not very good at this
Basically they're saying I have two elements from the same vector space
yes it false i forgot to mention it
And they each generate cylclic subspaces
so they're saying if I know they generate the same subspace
then they are the same
but no, of course not
there are many choices for generators that might not be equal
within the same subspace
ohh, wait so what would a counterexample be
Well my example is gonna be kinda messy...
but my intuition came from doing stuff with error correction codes
oh can i see your messy example
@brittle orchid and I are just talking and this is exactly what is going on.

I'm trying to speedrun videos on RRE as we speak 😂
@half forge Ah I just thought of an easy one. Rotation 90 degrees either forward or backward.
oh that would be an example
Tbh it's not actually that bad
If I actually paid attention and studied 2 hours daily I would actually come out with a 1st lol
But of course no one has ever done that
$${\begin{bmatrix}1 & 0 \ -3 & 1\end{bmatrix} \cdot \begin{bmatrix}3 & 9 \ 9 & 2\end{bmatrix} = \begin{bmatrix}3 & 9 \ 0 & -25 \end{bmatrix}$$
ninnymonger is a physics main.
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)
lol
cannot get that over brace to cooperate
What r u trying to figure out or show
what does this mean?
It might be easier to take a picture of the book
$$ \overbrace{\begin{bmatrix}1 & 0 \ -3 & 1\end{bmatrix} } ^{E_r(1,2;-3)} \cdot \begin{bmatrix}3 & 9 \ 9 & 2\end{bmatrix} = \begin{bmatrix}3 & 9 \ 0 & -25 \end{bmatrix}$$
I came across this in some online notes (Google search) but I'm not sure how this relates to the row operation described in the earlier image
ninnymonger is a physics main.
the matrix encodes the row operation.
Do you think it would be a bad idea to just ask my professor for help with notation when he calls me tomorrow most likely?
Stupid questions like "what does E_r(1,2;-3) mean"
$$ \overbrace{\begin{bmatrix}1 & 0 \ -3 & 1\end{bmatrix} } ^{E_r(1,2;-3)} \cdot \begin{bmatrix}3 & 9 \ 9 & 2\end{bmatrix} \cdot \underbrace{\begin{bmatrix} 1 & 0 \ -3 & 0 \end{bmatrix}}{E_c(1,2;-3)} = \begin{bmatrix}3 & 9 \ 0 & -25 \end{bmatrix} \cdot \underbrace{\begin{bmatrix} 1 & 0 \ -3 & 0 \end{bmatrix}}{E_c(1,2;-3)} = \begin{bmatrix} \sqrt{3} & 0 \ 0 &-25 \end{bmatrix} $$
@tame mural can you explain more of what you said
ninnymonger is a physics main.
@brittle orchid
So what does the E mean then?
E represents all the operations you've been doing so far
If the matrix is reversible, you'll ultimately end up with an inverse matrix
assuming this is rref
it isn't necessarily ^
okay, so piece by piece:
E_r(1,2;-3)
the E means it's an elementary row operation where there's no row switching
the r means it's a row operation so you have to multiply on the left side
the (1,2) means the value to consider happens in column 1 and row 2
the (1,2;-3) means the value to put in 1,2 is -3
From my understanding, this is the -3 times row 1 of I_2? added to row 2 of I_2?
okay
okay so your professor is applying two "functions" that do the same thing
the top of the row is what you said. R_2 -> R_2 - 3R_1
and bottom of the arrow is saying what i just said, with the matrices.

Edited
the E_r(1,2;3) is just telling you what specific elementary matrix to "hit" the original matrix with.
and then that's just matrix multiplication from there?
yes
Hmm I see
step two, using his same notation:
https://cdn.discordapp.com/attachments/540211747613704221/783487443335774248/162017091996745728.png

So, I have a question about the elementary matrices
(it is a guy prof right. i just assumed. )
if you can do elementary row operations using row switches and and row additions, then stick to that.
this E_r and E_C stuff is just the equivalent matrix representation of what it is you're actually doing, but using matrices to do the row switching for you.
So, do you necessarily need to apply the "elementary" matrices or can you simply apply the row operations?
okay, so say you want to do row switching in excell.....or google sheets.
and i've wanted to do this....
i can't tell google sheets to "do this row operation". the spreadsheet doesn't understand that language.
what the spreadsheet does understand is elementary matrix operations, so i use that instead.
both, one or the other.
if youre confused, and you seem to be, stick to row operations
but remember that "whenever you do a row operation" that's just a matrix multiplication in disguise.
@half forge How about this potentially similar and bad example; let S = {0, 1, 2}, or the integers mod 3. S can be generated through repeated application of n + 1 or n + 2.
@brittle orchid one last question so youre not feeling defeated:
what is the most basic row operation?
IMO a good way to encapsulate what you've been doing with matrices and all that E_r stuff is to simply put your matrix next to an identity one, and perform the same row operations on both
You are slowly creating that matrix
If your matrix is invertible, then you'll turn your original matrix into identity, and your agumented matrix into the inverse one
For many systems of equations problems, that inverse matrix is the "answer" matrix
what that image is doing, is exactly what we're doing.
but that image is working with a larger elementary row matrices. we only need 2x2 matrices in our case.
if you look at E_1, E_2, and E_3, they're all simple looking matrices.....they are very close to the identity matrix....that's a big clue as to what is going on.
Hi, apologies for the late response, give me a minute to catch up to this, was just sending an email
The most basic row operation is simply a row multiplied by a scalar, idk?
so that would be the same as multiplying by a scalar, wouldn't it?
no, it would the same as multiplying the entire matrix with the identity.
okay, let's be a bit more atomic with this:
$$\begin{bmatrix}3 & 9 \ 9 & 2\end{bmatrix}$$
ninnymonger is a physics main.
what's the first step to row reduce that matrix?
I mean, assuming these matrices are coefficients of equations surely if you multiply a row by a scalar it "does nothing"
i mean, i'm not looking at an individual equation here. we need to take entries in the matrix whole-cloth.
not piece-meal
you both mostly understand each other
but ninny is more precise
and reasonably more precise
well, the first step is to get rid of the 9 in the second column
in programmer terms, ninny means to feel out the "API" of the matrix and don't get lazy with it
because that's what you'd want to come away with
as opposed to the ability to eyeball the problem
are you able to do the reduction on a paper and send a picture?
tbh, I've never done a reduction before because I never had to sit an algebra exam 😂 but yeah, time to try
imagine, doing algebra 3 without knowing 1 and 2
yeah, this is a finger exercise. we gotta get our hands dirty.
yeah, I really really appreciate the help, btw
also, it sounds like you got some programming experience just from the way you describe this
the last person who described a problem as a "finger exercise" was my Computing teacher in school
where r u from whiteberry?
UK
ohhh
no wonder I Didn't recognize what u were saying
algebra 3, computation teacher
I was like huh
these are not really a question i can solve with numbers
anyone know where I should start with these questions?
its homework problems
Oh I study (the module) Algebra 3 at university, I meant Computing teacher while I was at school ("high school"). I study Mathematical Computation at university (UCL, to be specific, and I'm in my 2nd year)
They're basically asking you for 6 and 7, what's the definition of a vector space?
Some people memorize it as a list of properties
Use those properties as a test
Yes, exactly.
I tried to use this to figure it out
Btw ninny here we go. The reason I have no notation is because I don't know how to present it... 😅
okay, so we need to start from the tippy-top
and he did it with no notation >.>
@wintry steppe how about this, you agree what they're basically saying is can you have vectors with integer "entries"
those aren't closed under scalar multiplication
because you can multiply by 1/2
i think I am just confused with the wording on number 6
Then you end up with fractions
so you say scalar multiplication is not an due to fractions
what if the scalars are only integers.
without numbers how were you able to figure out
i am just confused I understand where you are coming from tho
I imagine a scenario where I can do a valid operation on polynomials
but end up "outside" of the set
then I know I broke "closure"
@brittle orchid https://www.youtube.com/watch?v=9LYVi-n-6Jw

Thanks to all of you who support me on Patreon. You da real mvps! $1 per month helps!! :) https://www.patreon.com/patrickjmt !! Row Reducing a Matrix - Systems of Linear Equations - Part 1. Basic notation and procedure as well as a full example are shown. The last part of the second part got cut off, but is finished in another video!!! For ...
i hope i'm not talking down to you. and that this is of your required level.
I have two more questions on my hw
Not at all, too much explanation really doesn't hurt anyone
in a worst case scenario I'd be reviewing some concepts
its true and false
you are apparently in a hard class, but you need to get your foundations straight
This one is worth understanding.
column space of A is just the range of the linear transformation communicated by A?
^i think thats right.
Let $V$ be a vector space with dimension $n$ and let $v$ be one of the basis vectors in a specific basis. Then, define a set:
$${v,2v,3v,\ldots,(n+1)v}$$
This is a set of $n+1$ vectors that does not span $V$
A is a matrix representation of a linear map T. indeed col(A)=im(T)
@tame mural you are right tho I don't hace my foundation down all I know is to solve problems.. so when it comes down to true and false or anything without numbers I don't know how to start it
Abhijeet Vats
also try proving e
hi
hii
@wintry steppe For g, is what I wrote reasonable or no?
Indeed. I'm assuming that V is a real vector space over here, of course
i'm not sure the how you are able to define a set $${v,2v,3v,\ldots,(n+1)v}$$
HUMBA CHUMBA
I don't think I took a high enough class to understand that part
i have not taken math proof
MATH 300 yet
Well, to explain why you can construct a set like that, you do need to study a bit more set theory. On the other hand, if you are willing to accept that I can take subsets of a given set, then all I'm doing above is taking a specific vector $v$, looking at $1v, 2v,3v, \ldots, (n+1)v$ and then putting all of these different vectors in a single set.
Abhijeet Vats
assume every linalg student has only seen naive set theory, abhi
haha well that's probably a fair assumption to make
@wintry steppe Does that sound reasonable, though?
i defo don't have any axiomatic set theory under my belt
most undergrad classes don't care
Well, it's not necessary to have axiomatic set theory to get started
yes it makes sense
thank you so much it took me a couple minutes to understand
sorry lol i'm not the brightest
@dreamy iron I watched part 1 & part 2 of Row Reducing a Matrix - Systems of Linear Equations by PatrickJMT as you recommended. So I can really just use simple notation like that? I don't have to use lambda (i, j), delta (i, j), epsilon (i, j, k), idek
you're still learning the subject so don't worry about it too much
But you should try to learn a bit of set theory to get yourself acquainted with dealing with different kinds of sets and so on
@cursive narwhal can i show you my calculator real fast
Sure
i hope its not out of your comfort zone
Why would it be?
your instructor uses the same notation
what is this though
In mathematics, an elementary matrix is a matrix which differs from the identity matrix by one single elementary row operation. The elementary matrices generate the general linear group GLn(R) when R is a field. Left multiplication (pre-multiplication) by an elementary matrix represents elementary row operations, while right multiplication (post...
so S is not a basis for r^2 since S is not linearly independent
So is that the same as for instance R_2 -> 5R_2 to represent row 2 being replaced with 5 times row 2
yes
I see
that's the general case for matrices of any size
the r means it comes from the left, okay.
and your instructor is saying $(1;\sqrt{3})$ just so that the first entry is to be replaced by $\sqrt{3}$
How do you read that verbally, btw?
ninnymonger is a physics main.
This, I mean
i have no idea, lol. i would write it on the board and point and say, do this thing.
maybe "multiply on the left by a diagonal matrix where the first entry is square root of 3"
that's prolly how i would "read that verbally"
or perhaps multiply each element in row 1 by 1 over root 3
I understand that it does not capture the purpose of the operation
but it does capture what the end result it
does it not?
yes, it captures the end result but it's not good math behavior.
there's no mention or appeal to a matrix multiplication.
so if there's not appeal to matrix multiplication then why use diagonal matrices.
You know, I didn't quite know why my professor used the D symbol till I clocked that the way to scalar multiply each element would be to use a diagonal matrix
just to clarify, you asked "how do you read that verbally" which is not the same question as "what do you get when you do this"
since, in our Algebra 1 module, we were taught the notations lambda (i,j), P(i,j), amongst others, when performing row operations
and the diagonal thing was a subtle reference which was never made
perhaps they expected us to figure it out but I wasn't that sharp 😂
you run into it explicitly eventually, which is now, it would seem. so congratz is in order

😂 thank you?

ahh I wish I paid a little more attention during algebra 1
But thank you so much, I must go to sleep now
@dreamy iron I hope you have an amazing day 🙂
would s be is a basis for r^2
because even if there is 000 on the bottom there are still 2 rows
1 0 0
0 1 0
0 0 0
there are still R^2
Yes, so you could be asked to solve for Mx = [0 0 1]
And that would be outside of the span of your matrix
And that's when your systems of equations is "inconsistent"
thank you
Is there an easy way to find the hamiltonian path for the cayley graph of a finite symmetric group?
Given two generators, a transposition and an n-cycle
How do I show that if $U ={(x,0,0) \in \mathbb{F}^3 : x \in \mathbb{F} }$ and $W = {(0,y,0) \in \mathbb{F}^3 : y \in \mathbb{F} }$ then $U + W = { (x,y,0) : x, y \in \mathbb{F} }$ by showing that the sets are equal?
LINEAR_ALGEBRA_GUY
I need to show that U + W is a subset of the right hand side and the other way around
oh you multiposted haven't you
how do I add demand function
Standard ordered basis is an ordered basis {v1=(1,0,0,..),v2=(0,1,0,0..)...vn=(0,0,0....,1)}
a standard basis is one that your space "comes with"
like
the default basically
if there is one
ty's

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
@dense wyvern this is not a linear algebra question, wrong channel. Also if you want to check your answer just differentiate it online on symbolab or wolfram. Better than asking here
So I'm taking a proof based linear algebra course this next semester.
This is the textbook: Peter Lax, Linear Algebra and its applications, second edition.
I have literally 0 linear algebra experience. I know how to do determinants and basically vector operation (dot and cross) and that's it. What's a good way to go about self studying some intro linear algebra at a high conceptual level over break?
if you're just looking for intuition or something, people seem to like the 3b1b series
i'd recommend you read ahead though
just like get acquainted with proof-based LA
to make the transition to it easier, assuming this is your first time
I'd recommend learning eigenvectors/eigenvalues and diagonalization as being an important goal
Honestly Axler is a good book
It has a weird treatment of determinants though
But you already know about that!
Yeah Axler doesn't give much importance to determinants in most of the book except the last chapter. But overall it is really good for theory. Other good books maybe are Linear Algebra, by Hoffman and Kunze or Linear Algebra, by Friedberg, Insel and Spence
Hello. I am trying to understand this solution on problem:
A linear isometry on R^n is an orthogonal matrix And the solution I found is as shown in the image. However I am unable to understand on how the first equality came?
<Ax, Ay > = 1/4 {|Ax....} (this term) Can someone please help
If matrix A is invertible, how would you determine if the power of said matrix is invertible?
Use properties of inner product
|A(x+y)|^2=<A(x+y),A(x+y)>
Ok, I am trying to simplify using properties
Does a metric on a set mean there is an identity element inside?
no
I see, thanks
Does a distance/metric on a vector space mean you have a normed vector space now?
Because you have the 0 vector now
no, not necessarily
you can put a very stupid metric on your vector space
theres no guarantee that the metric comes from a norm unless you require it to
Hello, I am trying to prove something, but not sure if my argument is correct or not, can anyone please comment if there is any mistake or lack of clarity.
The problem is:
Suppose V is a finite dimensional vector space, and T : V -> V, Prove that T is a scalar multiple of identity iff ST = TS for every S : V -> V.
==> If T is a scalar multiple of identity then T = c I for some scalar c.
TS = c I S = c S = S c = S c I = S T
<== If TS = ST
Then T v = c v, for some eigenvector v for an eigenvalue c. (But I can only write this when V is finite dimensional ( WHY ? = Because for a finite dimensional vector space, the smallest Vector space of dimension 1, there will be at least 1 eigen vector of dimension 1 spanning it or a 'dimension' of it, so we can write this), but what happens in infinite dimensional case?
So we have T v = c v, left multiplying by some S
S T v = S c v
T S v = c S v
which means Sv is an eigenvector of T for eigenvalue c, since S was arbitrary, this holds for any S
So this means T x = c x for all x, so T is a scalar multiple of identity, i.e. T = c I
Here, since S was arbitrary, but 'v' was fixed, why can I say this for all 'x'? Does this means every x belongs to V is of the form Sv for a fixed v, but some linear operator S will ALWAYS exists which will map 'v' to 'x'?
this is kind of hard to read and might get a quicker answer if you typed it in latex
Not always this may be the case, I think. You can have a T and S operators on finite. dim vector space, and T may not be a scalar multiple of the identity matrix but you may still have TS= ST , you can take S=T or you can take S as the zero operator or S as the identity operator
Correct me if I am wrong somewhere though
The person is asking if such a S exists
Didn't he say TS = ST iff T is a scalar multiple of Identity
i.e.,can you always find a map S such that S(v)=x
T satisfying those conditions,for any choice of S
It's an axler question,I believe
Yea,You can always find a linear map S: S(x)=v for any choice of x and v
Just consider a basis,one of whose elements is x
A linear map is defined by how it acts on the basis elements
The iff condition holds here if TS = ST for every such S, but yes, it may not be true if we are talking of a fixed S which commutes with T.
Very well, this makes sense! So I can choose a basis such that the linear operator maps one vector to another. So it will depend on the basis. This made sense. Thank you!
my interpretation is that T is a scalar multiple of the identity if T commutes with every linear operator S from V -> V
Yes. with "EVERY" such S
that's not what you wrote though
TS = ST iff T is a scalar multiple of Identity for every such S from V -> V
yeah that's very confusing wording that can be interpreted multiple ways
for one, you've redefined S
and for two, you could read it as TS = ST if (T is a scalar multiple of identity for every such S from V -> V) which is technically always true
The if part is trivial, so it will always be true, the converse is where I had questions
I'm not making a statement about the thing you have to prove
I'm just saying that the wording is off
Ok, I will take care from next time. Thanks for pointing it out.
well, you should take care of it this time and rewrite your proof in LaTeX so it's easier to read
I have taken care of the wording. I cannot change it to LaTeX as I need to figure out how to do that in here. So that I will learn and do next time.
If your matrix T is a rotation in V with real scalars, you cannot find eigenvalues (unless particular cases)
complex eigenvalues if you take the complex numbers
that's why I said real
You can easily show T has an eigenvalue by considering S such that Se1=e1 and S maps everything else to 0
But can I comment on the existence?
is group called vector space if it contains objects that can express every point in the space?
Benefits of C being algebraically closed
real vector spaces are trash
What about real dot product?
@calm hamlet The rotation matrix can have real eigenvalues too when the angle of rotation is k \pi. This may not be a good answer though. But you are right apart from these, it does not have eigenvalues in real vector space
@calm hamlet what are c and R
@native rampart so group called R- vector space if it contains objects that can express every R point in the space?
What's a R point
i mean every point of real numbers
@round coral that's why I said "unless particular cases" haha
If it works for any S, it necessarily works with well chosen matrices S Zenquiorra
So when I assumed this in the proof
Then T v = c v, for some eigenvector v for an eigenvalue c.
I cannot always write this if V is finite dimensional but NOT algebraically closed. Because such an eigenvalue may not exist?
Please correct me if I am wrong.
@native rampart @calm hamlet Please comment, I am so confused.
This
If a matrix is irreducible is it also primitive and vice versa?
Primitive matrices are always irreducible but not the other way around always
Ok.
@half ice @round coral yeah i actually quite like axler
yes, determinant treatment is weird
@round coral Thanks)
but you can just supplement it with another source
but i think axler's exposition and the way the book is structured and the proofs given etc etc are all good
@copper stratus
So watch out for the helper ping, it is expected to be used 15 mins after not being answered.
cool
cool
or you can just prove it
Anyone wanna help with that 🤔
how do you usually show something is linearly independent
Well I was about to give an answer but yeah it's useless
don't stop......: 🤣
is it if the determinant is nonzero @wintry steppe