#linear-algebra
2 messages · Page 148 of 1
do you like hockey?
I don't like any sports
but hockey is the one I am the most ok with
oh sorry
this is an on topic channel
anyone around to help me with a least squares line of fit for polynomial?
sure
so this is what im given
the part I usually have trouble with is creating the matrix
alright you think about what the equations say
you have ax²+bx+c=y for each pair of x and y
this is a linear combination of a, b, c
so we are finding a matrix which acts on (a,b,c) and hope the output is the vector with all the y values
so the first row is the first equation is month x=1 so x²=x=1
so the coefficients multiplying a,b, and c are 1,1,1
right
then for x=2 the coefficients are 4,2,1
second column is the x values? from the ordered pairs?
second row is the equation that gives you a(2)²+b(2)+c=4.4
so the y vector has the second entry as 4.4
and the entries along row 2 are 4,2,1
then for row i you get a(i)²+b(i)+c=y(i)
so the ith row is i²,i,1
make sense?
I think so but only cuz im looking at the book rn
the second matrix in m is what ur talking about right
first column of 1s then column of xs then colum of i^2?
yeah, the book is doing a different order of columns than I am
im sure im misunderstanding somewhere
but that is still right
okay lemme make the matrix then if you dont mind could u check it?
sure
yes!
WOO
in general, you are solving for the coefficient vector
omg I actually understand you magician
usually polynomials are thought of as a linear combination of powers of x
like take 3 x² and 5x and so on
so this way of thinking of it is counter intuitive a little
cause youre solving for the coefficient vector
so you have the think of having x² a's instead of a x²'s
I'm glad that helped!
yea so ive done a simular problem for a line before and I didnt quite understand how it applied to a quadratic
but the way you explained it made it all click
now I just make that matrix equal to the vector of y variables and solve yes?
yes solve ATAx=ATy
can someone help me walk through this proof why do we need to show B = XY^t
where did the V come from
and why is Y^t w = 0 come from
I'm confused on how this 2nd matrix is obtained
I figured it would be row reduction from the c matrixies on the left side and [T]b on the right side but that wasn't it
the columns of the matrix are just the representations in the basis C_1, ..., C_4 of T's action on the basis E_1, ..., E_4
so for example, if you wanna compute the second column
TTerra:
the (unique!!) scalars in this linear combination will be the second column of your matrix
and that's the second column
the computations for the other three columns are similar
@upbeat mauve
no row reduction
Oh yeah I understand now thanks
Why is there such scarcity regarding material on Kronecker Capelli's theorem? I have it for a test, anyone know of a nice article/video explaining it?
OH Rouche Capelli's theorem is the same???
ok epic
It's covered in pretty much every linear algebra course (?)
yes it's not always named
Given the set $P_n[x]$, subspace of P[x]$, why is its dimension $dim P_n[x] = n + 1$ if its basis is all powers of x from 0 to n?
np
analytically?
yes
im not given the matrix. just the character polynomial
so i have found the eigen values but cannot find the eigen vectors ofc
it's 12x12.
can you factor the char poly?
are you familiar with the concept of a minimal polynomial?
a linear map is diagonizable if and only if every factor of the minimal polynomial is linear
so if you know what a minimal polynomial is and how to find them, thats probably the most direct approach
well, if you could determine the dimensions of the eigenspaces, you could use that
i read something similar to that but have no idea what that means
i assumed i needed to have the matrix on hand (which i do not)
well, its hard to give general answers
might be worth skimming the first couple pages of http://math.mit.edu/~dyatlov/54summer10/ws18.pdf, it has some practice problems (with solutions) of this nature
but it depends heavily on how the char poly looks
are all its factors linear?
quick question when solving a linear equation and the answer you get is something like 1 = 1, 2 = 2, 3 = 3, etc what does that mean? That it's proportional?
hmm what do you mean?
if you end up with a bunch of tautologies that often means you have infinite solutions to your linear system
just forgot a definition in order for the direct sum of 2 vector spaces to be defined (assuming they are subspaces of the same vector space) must the 2 original spaces have {0} as their entire intersection?
or is direct sum more of a union thing, like the smallest subspace containing both
generally in linear algebra "direct sum" has two meanings
if you're referring to two subspaces of a given vector space, then direct sum means what's called the internal direct sum
and it refers to, well, their sum, so long as they intersect only at {0}
regardless of how two subspaces V, W of some larger vector space intersect, their sum V + W is always the smallest subspace containing both (since you're taking group theory, compare with generated subgroup stuff)
so it's kinda like the union in that regard, yes
just the union will never be a subspace unless one subspace in the union contains the other (classic LA exercise)
the other meaning of direct sum is basically just the product lol (it's called the external direct sum sometimes)
@rain echo
alright thanks for clarifying
I'm going through an old linear algebra book ("old"=1970) to see how much the subject has changed, and it is honestly so different
it's like giving a new perspective
as well as teaching me some history I guess
by reverse do you mean transpose?
no, cause A and A transpose always have the same rank
So if a vector or scalar is = 0, does that mean linearly independent or dependent
any set with the zero vector is linearly dependent
I just mean, if any of them equaled zero, would it be LD or LI
LD
Ty
wonder why this dude was lying https://www.youtube.com/watch?v=1I8nGrJKv-g

Please Subscribe here, thank you!!! https://goo.gl/JQ8Nys
How to determine if three functions are linearly independent or linearly dependent using the definition.
ohhh
that's different
ok
so if a vector is zero
then any set containing that vector is dependent
but
a test for linear independence
is to take a linear combination of vectors
which equals zer9
so like if x,y,z are vectors
O
you look at ax+by+cz=0
And if you can prove that the only solution to this is a=b=c=0, then x,y,z are linearly independent
Does hilbert space discussion come here?
Guess so
analysis is probably a better place
Can you only have as many linearly independent eigenvectors as you have dimensions?
Like say a linear transformation in R3
Can only have 3 LI eigenvectors, maximum?
you can only have 3 linearly independent vectors in R3, period.
lol, when you put it that way, right
I was thinking more like, vectors that aren't just scalar multiples of another
I know linear independence is more than that though
So say in R2, you can't have 3 eigenvectors that don't end up being scalar multiples of another right?
@clever pumice Each eigenvalue λ has a subspace associated with it and Lv =λv for all vectors in that subspace, called an eigenspace. If the dimension of the eigenspace is 2 or more, there are an infinite number of eigenvectors in that space which are not scalar multiples of each other. In R2, the identity matrix has an eigenspace of all R2 and has an infinite number of eigenvectors that aren't scalar multiples of each other.
It's common to choose a set of linearly independent vectors that represent each eigenspace. (They form a basis of each space). Only when the eigenspace is 1D are all vectors in that subspace scalar multiples of each other (all vectors on are on one line).
From my previous comment it should be obvious that there are never more than N linearally independent eigenvectors, since there are at most N linearally independent vectors of any kind.
It's also true there can be up to N eigenvectors.
Does series x^n converge if |x|<1 on a hilbert space(or whatever)?
@clever pumice Yeah, you can have many eigenvectors but the length of the basis of them if it exists must be smaller than or equal to the dim of the vector space. Am I right Timon?
yes
Have you heard of Pumba
no
Thank you!
@odd kite Haven't you watched Lion King? Pumba was a pig and Timon was his friend.
Are you answering me
I guess no?
So let me reiterate
Does series x^n converge if |x|<1 on a hilbert space(or whatever)?
@thin bloom sorry I don't know enough about functional analysis to answer
@thin bloom I think you must go to one of the advanced mathematics sections maybe?
? I mean, this is too basic for analysis I think
Sorry, not for me, I haven't studied it yet.
yeah Timon, it's a reference to stories about fleeing into the woods.
Hmmm
@thin bloom Although I don't know about Hilbert space, but for real numbers it is convergent. Quite useless, you would already know it I think
I think normally also, it is oscillating, I am not sure.
I forgot about how complex numbers behave
Can someone give me an intuitive explanation of Hermitian matrix ? I know the definition and the process , but I can't interpret its geometrical meaning . It would be helpful if someone can at least direct me to some resources
There's a lot to say about Hermitian matrices. I assume you are familiar with some properties, like symmetry of the conjugate transpose and complete basis of eigenvectors.
Some of the significance is plainly on the algebraic side of things
It's true for example that every matrix can be written as a sum of Hermitian and anti-Hermtian part, which is often a useful expression
Sorry if I am disturbing anybody, but could someone help me prove this?
From the context of classical Lie groups, Hermitian matrices are related to the tangent space of unitary groups. A unitary matrix is generated by matrix exponention of generators which are in the tangent space of the group at the identity. If H is a Hermitian matrix then exp(iH) is a unitary matrix.
You may be able to have some geometrical sense of what a Hermitian matrix does to its eigenvectors
@wraith dune you can consider each point A, B, etc as a vector and $\vec{AB} = \vec{B}-\vec{A}$, and also $(\vec{F}+ \vec{G}).\vec{H} = \vec{F}.\vec{H}+ \vec{G}.\vec{H}$
Timon:
Yeah, I end up getting BD - AD - BC - AC
Am I somehow supposed to group the vectors now?
@odd kite
@odd kite I am sorry , but my knowledge in Linear algebra is very minimal, I don't know most of terms you just mentioned . I know only basic Linear algebra and some intermediate topics like diagonalization ,SVD etc . I was interested in hermitian matrix in order to understand pseudo inverse of a matrix
like was trying to say they come up in a lot of different contexts and there's a lot to say
Ok , I understand .Why hermitian matrix comes into picture for this particular case ? What does it have to do anything with inverse of matrix ?
find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter k.
4x-2y+6z=0, 5x-y-z=0 and 2x-y+3z=0
can anyone solve this for me?
@hollow cobalt if you want a solution without solving use symbolab or wolfram. Computer is better for this if you are lazy
@unique sluice I'm not especially familiar with pseudo inverses but, starting with the basics if we have Ax = y and A is a singular matrix or rectangular, then we can have multiple solutions for x. So there isn't just one unique G where x=Gy and x solves Ax=y. So it appears they add various 'nice' conditions on G, which have some motivation behind them. When all four Moore–Penrose inverse conditions are satisfied G becomes unique. It happens that those properties also cause the relation you posted to be true when $H^H H$ is invertible. I'm not able to say much more than this on the subject at the moment.
Hermitian conjugation and Hermitian operators have an important role in linear algebra which is probably has something to do with why these particular set of conditions where chosen for the Moore–Penrose inverse
but I have very little experience using them
Timon:
Could someone help me prove this?
It just says that in a foursided shape ABCD: ... AD is perpendicular with BC
Then prove that ..
what a weird labelling of quadrilateral, in normal cyclic labellings AB and CD are never adjacent
Can anyone help me with diagonalizable matrixes?
post your question
I'm going to try to translate it at it's best
what language
Catalan
oof ok
Its about eigenvectors and eigenvalues
Knowing that A is a diagonalizable matrix that admits the eigenvectors (-1,2,2), (2,2,-1), (2,-1,2) and that A*(5,2,5)^T = (0,0,7)^T, find the eigenvalues and the matrix A
This is an optional that I have for tomorrow, I will know how to do it after class, but I like doing them before
My doubt is
How do I find a matrix out of eigenvectors without knowing the eigenvalues
in diagonalization the matrix that is diagonal one is actually the one which has eigenvalues on the diagonal. So I think find out the eigenvalues from eigenvectors
And how would I find the eigenvalues of the eigenvectors without knowing the matrix?
do I just factor them?
what is this I can't understand it A*(5,2,5)^T = (0,0,7)^T ?
Yes, but I have been very stuck here
I thought I should use a power iteration
I also know that 7 could be an eigenvalue of (0,0,1)
you already have the eigenvectors make the matrix of them then use A = PDP^-1
write a,b,c in the diagonal of D
and find the inverse of the eigenvector matrix
So I have to find D first
yes D is what you have to find, then you will know the eigenvalues
you have P, you can calculate P inverse
take D with a,b,c constants on diagonal and 0s everywhere and multiply these to get A and solve the equation
Can I use 7 and it's eigenvector(0,0,1) for this?
Please read what I have said, I have explained almost everything.
Yes 🙂
I assume this is what I will use when I have the matrix A to see if it gives me the same result no?
Sorry for being stupid but I'm having a hard time understanding this geometrically:
"If we have a dot C(xC, yC, zC) on the like AB, and AC/CB = m, then:
xC = (xA + m*xB) / (1 + m), ...".
I just don't understand why the formula works.
@jaunty wing yeah that is what you have to use, find A in terms of constant eigenvalues say a,b, c then use the equation
In other words once I have the matrix, I will multiply it by (5,2,5) and if it gives me (0,0,7) it means I did it right
you have to equate it with (0,0,7) to find the eigenvalues
Alright I'm lost again
if you get (0,0,7) directly then you already know the eigenvalues, then what's the use
Look over the diagonalization of matrix again. And see my messages then
Alright
If I'm given a subspace in R^4, and I know the subspace U= span{v1, v2} (where I know the vectors of v1 and v2).
How am I supposed to show that the dimension of U is 2? At first, I thought that a simple explanation would be enough (since it has 2 different vectors in span), but then they wouldn't write "show." Am I overthinking it?
you need to verify {v1, v2} is linearly independent
They are linearly independent.
I was thinking if that was enough, when the assignment says "show."
yes it is
I see, thank you a lot.
I had a question, that if I take two operators over R^infinity , say T and S where T is right shift operator and S is left shift operator like S(z_1, z_2,.......) = (z_2, z_3, .........) and T (z_1, z_2,.......) = (0,z_1, z_2, .........) . When we try to find the eigenvalues of ST, we do S (T(z_1, z_2,.......) ) = K(z_1, z_2,.......) upon simplifying it we get K(z_1, z_2,.......)= (z_1, z_2,.......) and so we get out eigenvalue K=1 but if we do T(S(z_1, z_2,.......)) = K(z_1, z_2,.......), we get no eigenvalue at all as T(S(z_1, z_2,.......)) = ( 0,z_2, z_3,.....) and if we equate it with K(z_1, z_2,......) there seem to be no eigenvalue K which satisfies the equation
Why is this so? For finite dimensional vector space, ST and TS have the same eigenvalues but not when they are operators over infinite dimensional vector spaces? am I correct? But I don't understand why it is so that they don't have the same eigenvalues
(0,anything.....) is an eigenvector of TS with eigenvalue 1
and also (1,0,0,0,0...) is an eigenvector with value 0
the last part is the real mystery
maybe I'm dumb but that looks like it should be impossible
my brain rejects that as a possibility
if hf=cf doesn't that mean h=c
as long as f is nonzero
forget about the self adjoint part I feel like in order for L to have any eigenvalues at all then h must be constant
idk I would give up
Can it be periodic perhaps?
then what
Well ok so
nah nothing
this shit is impossible
we need h(t) to spit out two values at the same time
it's not even a function
yeah it almost looks probably impossible
like is there a hole in the logic to saying that if hf=cf and f isn't zero then h=c
oh you're right
k even better
let me construct a function
it's like flat at -1 for a bit
then there's a line segment that goes up
then it's flat again at 1
let's just say
Yeah so a piecewise
yup
then if f is zero where h is not -1
hf=-f
but if g is zero where h isn't 1
then hg=g
Yeah but legit the ugliest fucking answer known to mankind
oh are you in sweden?
Yeah
are you getting a pure math degree?
Nop! Engineering Physics at KTH
oh I know KTH!!
Lessgo
ok can I dm you please
Yeah sure lol
I got a 3 x 1 matrix with a, b and c after multiplying PDP-1 * (0,0,7) and I assume these are the eigenvalues you told me about @round coral
But now I'm stuck at finding a b and c
I think I know what to do now, (5,2,5) are abc
Would x1 be considered a free variable? o.o the whole column for x1 are 0’s
oh wut i thought x2 was 0 
🙂
I guess 5,2,5 are not a, b, c
it gives me a decimal number and I assume it shouldn't, by how these exercises are prepared
@honest imp I don't get the same reduced matrix as yours - I get this.
Note there's an elementary step you can take to get Suu's, so they are equivalent. @silver tree
This is basically just considering the equations in a different order.
can a matrix be diagonalizable if it is linearly dependent ?
As far as I know, a Matrix can only be diagonalized, if a n x n matrix has n linearly independent eigenvectors.
a matrix with a full row of zeroes is linearly dependent by defaulkt right ?
because of the existence of a free varibale
Not necessarily (as far as I know)
what about $\begin{bmatrix}1 & 0 \ 0 & 0\end{bmatrix}$ ?
js:
well i mean something like
a 3x3 an the last row is all 0s
that matrix above is also linearly depenent btw
Well, how many eigen-values have you found?
Yeah, then you'll need to find a eigenvector for each eigen-value - if they are linearly independent. Then that matrix can be diagonalized.
Then it can be diagonalized.
Since it's a 2x2 matrix, with 2 linearly independent eigenvectors.
Oh.
I thought we were talking about Eigenvalues and Eigenvectors.
so how can you tell if a matrix is truly diagonaliable
n linearly independent eigenvectors
^
im confuse
wym linearly inepenent vectors
after you fin the eigeb vlaues an eigen vectors
you also have to fin if those vectors are linearly inepenent ?
have you encountered diagonalizing a matrix A like A = V D V^{-1} yet?
I actually have a question:
If i have 2 2D subspaces, U1 and U2 and I know their span vectors and that they are orthogonal on each other.
How am I supposed to make an orthonormal basis (q1, q2, q3, q4) where (q1, q2) $\epsilon$ U1 and (q3,q4) $\epsilon$ U2?
I though of just normalizing it, but the basis vectors in U1 aren't orthogonal on each other.
if needed, I can show the actual vectors.
Philoshōten:
Could you do a change of basis for U? Such that q1,q2 are orthogonal assuming they span the space
Well, then I should simply take one of the basis and make a ortoghonal vector on that vector?
I mean I think that would be ok as long as it’s still a basis
Tbh I’m taking an educated guess I could be wrong
I'll try it out later then - thanks for the help!
use gram schmidt it's a process to turn a set of LI vectors into an orthonormal basis for the space they span
@wise flare lambda =5 with multiplicity 2 means the eigenvalue 5 has 2 linearly independent eigenvectors associated with it
so everytime a matrix has multiplicity it isnt iagonilable ?
The reason is given above in the image you posted
and what you said is not true, if the eigenvalue 5 had a multiplicity 3 then the matrix would have been diagonizable whatever
a diagonal matrix could be made
im confuse
Try finding out eigenvectors and eigenvalues yourself, diagonalize the matrix on your own. Only then will you understand what is happening. Calculator can only give you answer
i have foun all that
Wdym ?
It can anything
Depending on the values you choose
-2
-2.5
1
That was my vector
wrong question I asked. How many distinct eigenvalues are there?
only the distinct count, there are only 2 distinct so you can't make a 3X3 diagonal matrix
But in that case
how is this true
thsts still 2 dinstinct
Sorry I take back my words, I said wrong. Sleepy!!
On which vector though?
you have 2 2d subspaces
The no of distinct eigenvalues must equal to the dim of the vector space your operator is on
So basically a matrix with multiplicity by default is not diagonlzable
in each, pick 2 vectors which are LI, then use gram schmidt on that pair
Is that true
Oh, so for instance pick q1 and q3, and use gram schmidt to find q2 and q4?
yes
Because there is like geometric and algebraic multiplicity or something t
I’m confused
I don't know that. But the theorem I have proved, is that if you have an n X n matrix then for it to be diagonlizable you need n distinct eigenvalues
and here there are only 2 distinct eigenvalues
But how are you sure that q1, q2, q3 and q4 are in their respective subspace?
Right but the contrapositive of your statement makes mine true
pick q1 and q2 in one subspace
That’s what I’m confused
Since q3 and q4 are already orthogonal, then I don't need use gram schmidt on that, right? I simply need to normalize it. but for q1 and q2, I need to do it.
yes
@round coral I agree with you
I’m asking if the opposite of that Stevens is true
So a matrix has an eigenvalue with mutlitplicity. Is it immediately not diagonlixable
no
Alright, thank you very much - I'm reading about this in advance, and thus not that knowledgeable at the moment.
The premise of that book statement alludes to it tho
@wise flare Actually I studied a bit and found out that only when geometric multiplicity is equal to algebraic then only the matrix is diagoni...
algebraic multiplicity you may know when we find Null(A - lambda I) , then we get it.
the polynomial whose roots are the eigenvalues, the multiplicity of those roots is the algebraic multiplicity
Right but this leads to a bigger question.
To find the geometric multiplicity. You need to matrix A
the geometric multiplicity didn't you find just now, it is 2
That’s the algebraic
If the geometric was 2 then the matrix would be diago
And it is not
I checked it I am right. See the polynomial you got with which you found the eigenvalues
The issue is that say you have some arbitrary matrix A that is like a 15x15 and you are only given the character polynomial. How would you know if it’s diago. You cannot do the geometric check (A-lambda I)
That’s the flow in the theory that I am failing to understand
I don't know that, I only deal with the theory aspect and am not much considered with the computation
That’s still the theory
You cannot truly find if a matrix is diag or not just based on the eigen values
and checking geometric is not so tough, after all you just have to find the eigenspace
You need a matrix for that
ah yes, define a matrix to be diagonalizable if its algebraic and geometric multiplicities coincide

@wise flare Now you believe me, Tterra is an OG . He has already studied all this stuff
I never disagreed with you
I disagreed that you cannot find if a matrix is diago or not with just its character poly
You need the matrix itself
an nxn matrix with n distinct eigenvalues is always diagonalizable 
That’s true
but yeahthe characteristic polynomial alone tells you nothing
well
not much
given any polynomial you can find a matrix that has it as its characteristic polynomial
@wintry steppe Sempai 👍
so just the char poly doesn't tell you a whole lot
But then that means that if a matrix had multiplicity. It shouldn’t be diagonalizable
This is literally what that picture is saying
it probably means algebraic multiplicity
and in that case the geometric multiplicity of 5 as an eigenvalue is strictly less than the algebraic multiplicity, 2
so it cannot be diagonalizable
since diagonalizability, as kanishk mentioned, is equivalent to alg mult = geo mult for every eigenvalue
I don’t understand
ok so the characteristic polynomial of this thing is
(also i mistyped, pls reread)
ugh discord is being annoying one second
ok so like this thing has characteristic polynomial x(x - 5)^2 up to a sign, so the eigenvalues are 0 and 5
the algebraic multiplicity of an eigenvalue is defined to be its multiplicity as a root of this
so 0 has algebraic multiplicity 1, and 5 has algebraic multiplicity 2
the geometric multiplicity is defined to be the dimension of its corresponding eigenspace
and i'm assuming once you work out the dimensions of the eigenspaces (as symbolab did i guess), you find that 0 has geometric multiplicity 1 and 5 has geometric multiplicity 2
diagonalizability is equivalent to the algebraic and geometric multiplicities agreeing for each eigenvalue
in this case, that does not happen
so the matrix isn't diagonalizable
if there is more confusion @ me
wow many typos 
pre-coffee math isn't a good thing
ok chum it shouldn't have typos anymore
How would I find out c after doing what I’ve done thus far? I thought about saying that each eigenvalue corresponds to a eigenvector which all of them would be considered linearly independent, and since there’s three linearly independent vectors they can span the space R3
there’s three linearly independent vectors they can span the space R3
yes

eigenvectors corresponding to distinct eigenvalues are linearly independent
and you have three distinct eigenvalues
so you're correct, i'd just be a bit careful with the wording though
Ah okay, yea sorry I’m not great at explaining mathematical ideas/concepts
it's a skill you develop over time
frankly
it's probably the only reason i help out in these channels
this
how is this fiun @wintry steppe
foun
just look at the characteristic polynomial
i meant this
sorry
are you asking how you find the dimension of the eigenspace?
the geometric multiplicity is defined to be the dimension of its corresponding eigenspace
and i'm assuming once you work out the dimensions of the eigenspaces (as symbolab did i guess), you find that 0 has geometric multiplicity 1 and 5 has geometric multiplicity 2
diagonalizability is equivalent to the algebraic and geometric multiplicities agreeing for each eigenvalue
that is the same multiplicity as the arithmetic multiplicity so if they agree
how is it not iagnonliable
sweet fucking christ i made so many typos
sorry
don't worry i have my coffee now
oh jeez
yeah i've probably just confused you further, i think i misread things
sorry
give me a few minutes to collect my thoughts and i'll write something that isn't blatantly wrong
i basically owe it to you after dragging you through all this
matrix has characteristic polynomial x(x-5)^2, up to a sign
so we have eigenvalues 0 of alg. mult. 1 and 5 of alg. mult. 2
to determine diagonalizability we need to find the corresponding geo. mults.
the matrix will be diagonalizable if and only if the geo. mult. of 0 is 1, and the geo. mult. of 5 is 2
when you compute the dimensions of the eigenspaces, they're both 1
so the geo. mult. of 0 is 1, and the geo. mult. of 5 is 1
these do not match up with the algebraic multiplicities, so the matrix is not diagonalizable
if this has a typo i will leave the server
if given only the characteristic polynomial? i'd say no, not really, since finding the geometric multiplicities depends on the matrix itself
what's a caracter polynomial
open up the representation theory book and figure out
det(xI-A) is the polynomial
ew i don't like picking up extra factors of -1
Hey folks I have a system of linear 2nd order differential equations [M] and [K] are 3x3 matrices, F(t) is a 3x1 time dependent vector, and X is a time dependent vector I'm trying to numerically solve. Without using 'modal analysis' does anyone know how I can solve the following:
$$
[M]\ddot{X}+ [K]X = F(t)
$$
The Smelly Cherry:
I think the diff eq channel would be better suited to that oof
also one question of my own
im having doubts about the way i proved the forward implication
I think the union of the two subspaces $U_1 \cup U_2$ is going to contain zero and it will be closed under scalar multiplication. We need to search for problems in additive closure.
mirzathecutiepie:
you are correct
I said that $U_1 \cup U_2$ had to be closed under addition (since it is a subspace as we assumed). This is the same thing as saying $u,v \in U_1 \cup U_2 \implies u + v \in U_1 \cup U_2$. So we must have either $v,u \in U_1$ or $v,u \in U_2$. If $v,u \in U_1$ and $v,u \in U_2$ then $U_1 = U_2$. (This is the part im iffy about) If $v,u \in U_1$ and $v,u \not\in U_2$ then $U_2 \subset U_1$
mirzathecutiepie:
i think the last part is wrong
i did a similar argument for when $v,u \not\in U_1$ and $v,u \in U_2$
mirzathecutiepie:
i think my problem was assuming that set inclusion obeys trichotomy
mmm yeah it's sketchy, since there are $u, v \in U_1 \cup U_2$ such that $u + v \in U_1 \cup U_2$; it's just not all of them
Saccharine:
I think it's probably easier to consider disjoint subspaces U and V; it's not hard to prove that u + v is not a member of either subspace
tho i believe this statement is sound, right $v,u \in U_1$ and $v,u \in U_2 \implies U_1 = U_2$?
yes the answer key does it by contradiction
ill try that then
I think that statement is sound, if you consider all v, u in the union, but I don't see how it gets you anywhere
yeah
you're basically just saying that the union is a subset of each space
which is way too specific
you could go about this proof in this way:
If one subspace is contained in the other, then their union is a subspace (trivial)
If one subspace is not contained in the other, i.e. both differences (U1 - U2) and (U2 - U1) are nontrivial, then they are not closed under addition, and you can exhibit a vector like this
(U1 - U2) and (U2 - U1) are disjoint, so it reduces to the disjoint proof, and you can find a vector u in (U1 - U2) and a vector v in (U2 - U1) such that u+v is not in (U1 - U2) union (U2 - U1); further, u + v is not in the intersection of U1 and U2, so it can't be in (U1 - U2) union (U2 - U1) union (U1 intersect U2) = U1 union U2
this is the proof that makes intuitive sense to me, but it's a bit convoluted
can a basis of 0 , 0, 0 be a kernal of a linear trans?
what do you even mean by 0, 0, 0?
a basis for a vector space is not the kernel of any linear transformation
at least in finite dimensions 
i don't think that can be true in infinite dimensions either actually 
besides the point. mostly likely a mis-woreded question
what is PCA?
principle component anaylsis
dimnesionality reduction
after choosing the k eigenvectors from the eigendecomposition of the covariance matrix we project our original data onto the column space of those k eigenvectors correct?
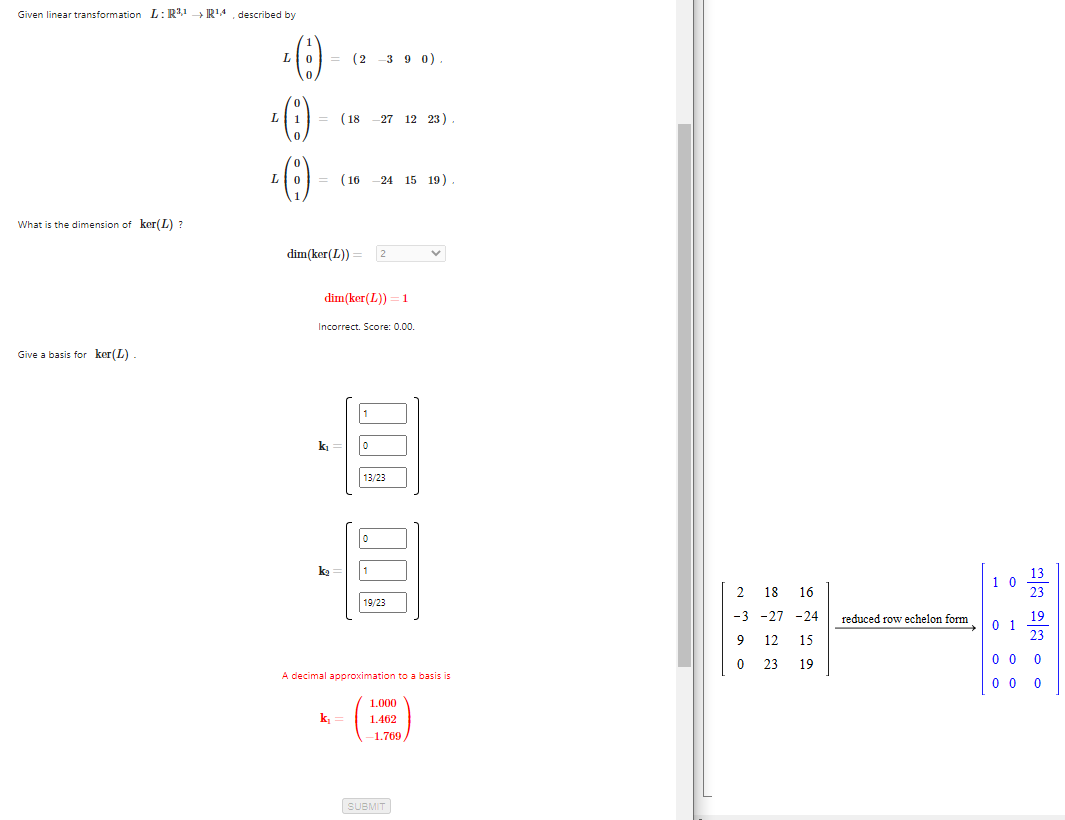
my work is on the right and the correct ans is on the left (in red)
what steps am i missing here?
only thing i realized is that 1.769 is equal to 23/19 seems like im missing a lot of steps tho..
I'm kinda blanking out, but: "Use this to write the image Nx as a linear combination of b_1 and b_2."
So if my Nx is [1&0 \ 0&1/4] [x_1 \ x_2] and b_1 is [2 \ 1] and b_2 is [1 \ -1], I'm a bit confused on how to write it as a linear combination
Edit: rip formatting
Wait am I supposed to do N(b_1) and N(b_2)?
Nx is a linear combination of (1,0) and (0,1/4) so you need (1,0) and (0,1/4) as linear combinations of (2,1) and (1,-1)
{kind=link}
{kind=link}
are u familiar with change of basis strawberry?
Kinda, it's what I did in the first part of the problem (not shown in the screenshot)
do u have a screenshot? I want to make sure I'm not about to overcomplicate this
And A = [3/4 & 1/2 \\ 1/4 & 1/2], given in the problem
is the E basis the standard basis?
Yes
Wait I think I just set up a system of equations from it?
Am I overthinking this or underthinking it lmfao
I'm asking myself the same question atm
Lolol I think I might just ask them @ office hours tomorrow. Before I go, do you have an idea how to find N^{1000}x? There has to be some shortcut out there, right?
yeah, N is a diagonal matrix, so you can take corresponding powers of the diagonal entries
Ah I think I've seen that around somewhere. Thank you so much for helping!
np
how do you prove that a linear transformation is surjective?
proving it isnt is pretty easy bc you just need a counterexample
look at the span of the columns
the student im trying to help hasnt learned how to make a matrix out of a general linear transformation yet
oh
hmmmm
you should be able to get around it
find a basis for the domain
and determine whether the space spanned by their images in the codomain is the entire space
possibly
but yeah tough without a matrix
@hollow finch there are many ways, one is the way to find rank of the matrix of linear map, other is to find the null space, then use rank nullity theorem,
there is one also that every surjective linear map has a right inverse
Aha rank nullity theorem thats smart
yeah that's a smart idea
If rank(T) is equal to the dimension of the codomain then it is indeed surjective right?
yes
if it is an operator the job becomes really easy, surjective and injective mean the same thing
true
an important point to note also that the dim of the vector spaces say if the linear map is from U to V then dim U must be > = dim V for the map to be surjective but if dimU < dim V then there is no chance for that at all
What's the example? If you can't make a matrix out of it, your best bet is really just to reason that you can hit every point
if a divide c and b divide c and gcd (a,b)= d then ab divide cd . how do I proceed to proof this
HI quickie question, does homogenous system mean systems with trivial solutions?
homogenous system means Ax = 0
that's called inhomogeneous
I see
but yeah right idea
Oh okay, I have to get pass to invrses then to fully understand
i just assumed cuz of the 0 at the end
we call the solutions of Ax=0 the kernel or nullspace, you'll probably get to that
eventually
For the following system of homogeneous linear equations, find the solution if it is unique; otherwise, describe the infinite solution set in terms of an arbitrary parameter k.
4x-2y+6z=0, 5x-y-z=0 and 2x-y+3z=0
Can anyone solve this for me?
I can't solve it for you. I can give a hint though: Write the question using a matrix representation.
@stabulo should I solve it by determinant method?
I'm not sure what the determinant method is.
Do you mean using the determinant to find the inverse matrix to then apply it appropriately to the matrix representation?
Or do you mean Cramer's rule?
Hey I managed to pass the inverse topic -- so if its inversible, that means it has one solution?
nvm
@hollow cobalt if you want solutions write the matrix in symbolab or wolfram or any other good site
just realized -- linear algebra is teaching me how to find X in different ways?
now im learning LU Factorsz

Well linear algebra is not only finding X, there is way much to it
If the determinant is non-zero, there will be a inverse matrix, so a unique solution will exist. The proof is simple.
If Ax=0 is the system. If A is invertible (detA is non zero) then A^(-1) exists
A^(-1)Ax = A^(-1)0
Matrix multiplication is commutative, meaning you can put the brackets in any way:
( A^(-1)A )x = 0
Ix = 0
x = 0.
This also shows, if A has an inverse matrix, the only solution to the "homogenous" system is (0,0,0).
Assuming I've not made any mistakes, only just starting to learn Linear Algebra.
@arctic hornet
Wrong tag! sorry! I would delete but then it would just be a invisible ping, I argue that's worse.
@hollow cobalt
You can also view it geometrically as the intersection of the 3 planes.
If you plot them you will see they intersect at the origin.
I guess you asked a related question, so the ping wasn't too bad actually.
just want to know -- if matrix is invertible, then it has 1 solution?
What is the solution of a matrix?
The system of equations represented by the matrix has 1 solution
matrices don't have solutions
it doesnt make sense to speak of a matrix having one solution or not
if you want to talk abt a system of equations then you talk about a system of equations
so like the solution for this system of equation?
yes, if a matrix A is invertible then the system Ax = b has one and only one solution
Notice the lower cases used on x and b, they are matrices but it's usually written in lower case, since they are vectors, to indicate this you should use bold or arrows. You can modify a proof by having b instead of 0.
You had the write idea I imagine, just need to be careful with language.
I understand, thank you for that
am i allowed to ask for help with homework (i've already finished it)
or does it fall under "Requesting help during an exam is a bannable offense."
If people got banned for asking for help with homework, there wouldn't be a server left.
hey -- about linear transformation, is there another term for it? Its really confusing
theres so many kinds O.O
don't get what
R2 and R3
wh
some particular classes of linear transformations get special names because they have special properties that make them st-
what
oh god
Idk after my determinant topic--it jumped to linear transforms
suddenly I see more than 5 letters
hey guys is this defitition correct?
the determinant of a matrix is the scalar for the new area/volume after a transformation
Obviously a geometric pictures only works for 2D and 3D, in the 2D case it's the scale factor for which areas are scaled by and in 3D it's the scale factor for which volumes are scaled, the sign indicates orientation. If you go around each point in the same order you will have a direction (clockwise or counterclockwise) if it's negative after transformation, going in the same order of points will have the opposite direction (2D case), I'm not sure on a "nice" description for the 3D case though.
@austere cedar it also works for 1D, s scalair is just a vector in 1D, the determinant ( trivial ) gives the length of that vector.
Good point.
I have a course right now regarding analysis of data and we have gone through different types of algorithms (regression, clustering, classification etc.), loss functions (MAE, MSE, RMSE), and matrix notation. Anyway, one of the exercise tasks is the following:
I'm not entirely sure how to start though. In our book, $\bar{x}$ is notation for the average or the sum of all $x_0 \ldots x_n$
Resident Tracksuit Advisor:
So as far as I can see, the above is equivalent to a row vector that looks like this $[x_0,:\ldots:, x_n]$ that is multiplied to a column vector with the same values
i would assume indexing starts with 1 and not with 0
Resident Tracksuit Advisor:
Oh yeah you're right
I study CS so I keep thinking everything is zero-indexed lol..
anyway
I am unsure of how to differentiate this.
Any tips or hints would be greatly appreciated.
Usually, with a function like $f(x,y)=4x^2+y^2$ the gradient would be $\nabla f = <8x, 2y>$. But for some reason, when it's written in vector/matrix notation my mind is all blank.
Resident Tracksuit Advisor:
\langle and \rangle, or \left< \right>
anyway
you could rewrite this function coordinate-wise
$f(\bar{x}) = \sum_{k=1}^n x_k^2 + c$
Ann:
x here is a col vector by the way
Oh yeah that's true. I just assumed they wanted us to do it with matrix/vector notation, but they're not strictly forbidding us from doing this. They're the same thing anyway, just a different notation.
Thank you so much, this makes it a lot easier!
How would I go about rewriting this?
$$
f(\bar{x})=\bar{x}^{T} A \bar{x}+\bar{b}^{T} \bar{x}+c
$$
It's mostly the $A\bar{x}$ that's causing confusion
Resident Tracksuit Advisor:
$\bar{x}^T A\bar{x} = \sum_{i,j=1}^n a_{ij} x_i x_j$
Ann:
$\sum_{j=1}^n a_{ij}x_j$ is the $i$'th component of $A\bar{x}$
Ann:
Okay yeah makes sense. How would I go about differentiating something like this? Is the derivative simply $a_{ij}\cdot 1\cdot 1 = a_{ij}$ when you're differentiating with respect to x?
Resident Tracksuit Advisor:
With a sum like this:
$$
f(x)=\sum_{i=0}^{n} a_{i} x^{i}
$$
The derivative is:
$$
f^{\prime}(x)=\sum_{i=1}^{n} i a_{i} x^{i-1}
$$
But in my case there's both i and j. So what would the derivative of $a_{ij}$ be?
Resident Tracksuit Advisor:
What do you mean by the derivative of a_(ij)? Isn't a_(ij) just a constant entry of a matrix?
I suppose it is yes
Would the derivative of the above then be
$$
f^{\prime}(x)=\sum_{i, j=1}^{n} ija_{i j} x^{i-1} x^{j-1}
$$
im sry for accidentally jumping in
Resident Tracksuit Advisor:
It's fine no worries
Are you confusing exponents with subscripts?
x_i is the i-th component of the vector x
It is not x to the power of i
Oh fuck
Lol
What would the derivative then be? if they're all constants and we're differentiating with respect to x then surely $a_{ij}$ would be 0 whilst the two x variables will be 1, which means the derivative would be 0*1*1 = 0? Or am I still not understanding this correctly
Resident Tracksuit Advisor:
It's like if you have for example $F(x,y) = axy$ . The derivative wrt x is $F_x(x,y) = ay$, with respect to y you get $F_y(x,y) = ax$
The a's are coefficients as before, focus on which variable you're differentiating w.r.t.
Apopheniac:
Well, I'm asked to find the gradient $\nabla f(\bar{x})$ of:
$$
f(\bar{x})=\bar{x}^{T} A \bar{x}+\bar{b}^{T} \bar{x}+c
$$
But usually when finding gradients, you have one or more variables. In this case, it's simply saying to find the gradient of $f(\bar{x})$, which as far as I understand is the same thing as saying find the gradient of:
$$
f\left(\sum_{k=1}^{n} x_{k}\right)
$$
Resident Tracksuit Advisor:
The gradient is just a vector whose components are the partial derivatives of the function
So just take the partial derivatives of the thing on the right-hand side
Yes but how can you find partial derivatives when there's only one variable indicated on the left side? Wouldn't it just be the derivative of the whole thing in respect to x?
I thought partial derivative implied at least 2 variables
TheDon:
yes it's $[x_1, \ldots, x_k]$
$f(\vec{x}) = f(x_1,x_2,\dots , x_n)$
Resident Tracksuit Advisor:
But how would I go about differentiating with this notation? It confuses the hell out of me
differentiate with respect to each of the variables
just like how you would normally find the gradient.
TheDon:
I'm sorry I just don't understand it. Would you mind walking me through it in an ELI5 fashion?:/
Maybe try it for n=1, n=2
$\frac{\partial}{\partial x_k}\left( f(x_1,x_2,...,x_n) \right)$ will be the kth coordinate of the gradient
Apopheniac:
$\pdv{x_k}$
Lunasong:
Lol
one sec
So I was doing #1 C and was wondering if what I was doing was correct.
- I setup the equations as follows:
eq 1: -2a + b + 2c
eq 2: a + 3b + 4c
- scaled equation 2 by "2"
(2a + 6b + 8c) + (-2a + b + 2c) = 7b + 10c = b = -10c/7
- plug b into equation 1.
(-2a -10c/7 + 14c/7 = 0) --> -2a = -4c/7 ---> a = 4c/14
before i go any further, (-4c/7) / -2 is 4c/14 right?
is there an image that's meant to be here
also -2a + b + 2c is an expression not an equation
so you're trying to explicitly establish whether or not a set of 3 vectors in R^2 is linearly independent?
yes
you're kinda wasting your time there
a set of 3 vectors in R^2 will always be not LI
nmw
but i got them all = 0
I got b = -10c/7 and a = 4c/14, plugged those into the 2nd expression to get the expression:
4c/14 -60c/14 + 56c/14 which comes out to c = 0
or did it just come out to 0
and not c = 0
you should have had the equations: -2a + b + 2c = 0 and a + 3b + 4c = 0
I did
there is also an issue with your work but if properly formatted it will become correct so whatever.
i had to scale the first expression by 3
I got b = -10c/7 and a = 4c/14, plugged those into the 2nd expression to get the expression:
you would have gotten 4c/14 -60c/14 + 56c/14 = 0
or just
0 = 0
which tells you nothing
doesn't 0 =0 tell me that C doesn't equal 0 so it is linearly dependent
ok ty
What do I use to check if a list is orthonormal?
A list of vectors is called orthonormal if the vectors in it are pairwise orthogonal and each vector has norm 1. In other words, a list {e1,..., em} of vectors in V is orthonormal if 〈ej, ek〉 equals 0 when j = k and equals 1 when j = k, for j, k = 1,...,m. For example, the standard basis in Rn is orthonormal.
@royal ore the definition of orthonormal
Are cofactors numbers or matrices?
Anyone here experienced with sparse matrices?
@nocturne jewel cofactors are numbers. the cofactor matrix of A is the matrix made of A's cofactors
$C_{i,j} = (-1)^{i+j} \cdot |A_{i,j}|$ right?
moshill1:
a hint is to not even think of C's entries. think of the size of I so that the sizes of CI & C match. then think of the simplest such I where CI=C
so it's not a 3x4?
My prof said either det(A_ij) or |A_ij| meant the same thing
A is the matrix. A_ij is the (i,j) entry of A. neither det(A_ij) or |A_ij| make sense to say
if you mean to say C_ij=..det(A) that's wrong
the formula is C_ij=(-1)^(i+j)M_ij where M_ij is the (i,j) minor of A
how would I do the C*I = C question
@gray dust a_ij is the entry, A_ij is the matrix with the ith row and jth column removed
@nocturne jewel then that's ok
It can't be a 3x4 or the multiplication wouldn't be defined
C is 3x4 and we want CI to be a 3x4 as well (the matrix C specifically)
So we need (3x4)*(mxn)->(3x4)
We can find m and n by
- Making sure the multiplication is defined
- Making sure the result has the correct dimensions
so what is the difference between Hadamard product and the matrix product?
one you dot product rows and columns and it works for matrices with the same "inner dimension"
that's the matrix product
one you just multiply corresponding entries for matrices of the exact same size
that's the hadamard product
a big difference is the matrix product is rarely commutative while the hadamard product is
so i'd have A(i,j) and B (i, j),both of the same dimension, and I'd do A(i) * B(j)?
@wintry steppe
oh yeah ok thats different from how i have seen it, i usually just write A(i,j) to mean the determinant itself so with abs value signs, which also can mean determinant, I thought you were taking the abs value of the determinant
If A of shape m * n (column, row) and B is of Shape n * p, then C (the matrix product) is of shape C m * p
@wintry steppe
the matrix product yes
Then what I did there was just times the elements of each row by each column of each matrix?
i don't understand what you mean
Sorry, I just started learning Linear Algebra
I just can't understand what the matrix product is going to do with those matrices
I'm going through the deep learning linear algebra section of MIT
if $A$ is $m \times n$ and $B$ is $n \times p$ then the matrix product $AB$ is the $m \times p$ matrix whose $i$th row and $j$th column entry is $$ (AB){i,j} = \sum{k=1}^n A_{i,k}B_{k,j}, $$ which is the dot product of the $i$th row of $A$ with the $j$th column of $B$
bot slow today
TTerra:
on the other hand
if $A$ and $B$ are both $m \times n$, then the Hadamard product $A \circ B$ is the $m \times n$ matrix whose $i$th row and $j$th column entry is $$ (A \circ B){i,j} = A{i,j}B_{i,j} $$
TTerra:
key differences
- matrix product is defined for matrices of different sizes, hadamard only for matrices of the same size
- matrix product is rarely commutative, hadamard product is always commutative
- the matrix product says something about linear transformations, the hadamard product on the other hand idk
its the way that every beginning linear algebra student wants to multiply matrices
pretty much lmao
the "identity with respect to the hadamard product" is just the matrix with all 1s
hahaa that is pointless literally what can you do with that product
lol yeah when they said matrix product i was like: wow finally something easy to do
idk
could the relationship b/w the hadamard product and the trace of a product give any intuition for what the hadamard product means?
or is there not really intuition
the hadamard product gives you a commutative unital ring
which might be nice
you can call it a cring
yes
other than being easy to compute im curious to know what it could possibly tell us
its like arithmetic but multiple number at a time
I looked up unital ring and saw anime 👀
to wikipedia one goes https://en.wikipedia.org/wiki/Hadamard_product_(matrices)
seems like you can say a few nontrivial things
there's also hadamard division apparently 👀
hah i was just looking at the wikipedia page
{kind=link}

not a lot of applications
i guess its nice to have a commutative ring of matrices
well I think it actually gets used a fair bit in engineering, especially with vectors rather than matrices
in numerical stuff
but it often goes by a different name
the makers of MATLAB apparently decided to call it 'array multiplication'
but I have used that operation quite a bit
.*
so its just when you want to do like lots of calculations and keep them in a box or what
Just take a look at the hint and you can set up a system from that. An arbitrary 3x3 matrix so:
$\begin{bmatrix} a&b&c\d&e&f\g&h&i\end{bmatrix}$
And multiply that by each of the e basis vectors = each of the corresponding new basis vectors
strawberrypocky:
you have to make a matrix of a linear map. Do you know how to do that
you are given where the basis vectors are sent to

The matrix of a linear map. Addition of matrices. Scalar multiplication of matrices. The vector space of matrices.
don't know if you have the book so
If e_i is the ith standard basis vector (zeros in all entries except for a 1 in the ith entry)
then notice that Ae_i gives you the ith column of your matrix. Ae_i is also where e_i gets mapped to, so they are one in the same.
for example
$$A\vec{e}_1=\begin{bmatrix}1\0\1\end{bmatrix}$$
nix:
but Ae_1 is the first column of your matrix
so... thats the first column of your matrix
the third column is being multiplied by two
you can get more general than this by using coordinate vectors but thats the basic idea
@royal ore watch the video I gave. Study first the book then ask here.
probably. this is a question which you could do without scratch work
its easier than it looks but requires conceptual understanding
@royal ore it your concepts aren't clear no matter how much people say here, you will get more and more confused
so go back read again
any problem then come back
wait
which is the main basis
cause if i'm using a 3x3 matrix example
how does that get applied
there is no "main " basis
so what does it mean when it maps the one basis to the other basis
like how does that get applied to the 3x3 matrix
i think they mean the standard basis? it’s just <1,0> <0,1> in R^2, same pattern for R3. 3Blue1Brown has a great conceptual video for it
when you construct a matrix for a linear transformation you have to do it for specific bases in the domain and codomain
because otherwise how do you know you did it correctly if the vectors we write don't mean the same thing?
imo the hint for this problem is a big waste of time and scratch paper :/
column perspective is all you need in this case
i mean change of basis, the long way, is still kinda pretty important to understand imo, but i could be totally wrong. if they don’t understand the concept rn, i think it’s worth it to use the scratch paper & work through it, rather than going straight to the shortcut. kinda like jumping to the power rule in calc 1 before you understand limits
lol i’ll shut up bc i’m still in linalg but yeah
nono i see where youre coming from. i just think that column perspective is more fundamental/important than change of basis so it should go first, especially since this problem doesn't actually require a change of basis at all. however yes i agree conceptual understanding of change of basis is incredibly important
since change of basis is such a tricky topic with really confusing formulas (at least imo)
A least squares question. I want to fit a circle to 4 points. (0,2),(0,3),(2,0),(3,1). Ive found the following matrix equation to find A B and C. How do i insert my x's y's and n into this matrix?
what a weird circle how can it touch both (0,2) and (0,3)
there is nothing weird about a circle intersecting the y-axis twice
oh yes I remembered
thank you for pointing that out
but this question can be done more simply using just the general equation of the circle
It's for an assignment and i am supposed to show how i find the equation of the circle
And i'm just really stuck in what x_i actually means?
As i see it i have 4 x values and i don't know which to use. Do i take the average of them? 😄
The points are (x_1,y_1),(x_2,y_2)...
For example: sigma(x_i^2) is just x_1^2+x_2^2+x_3^2+x_4^2
if x^2 + y^2 = r^2 what is x+y in terms of r?
Can anyone help?
impossible to determine uniquely