#linear-algebra
2 messages · Page 38 of 1
Just find a counter example
If it's not linear, then it must break one of the rules that a linear transformation must have
T(a + b) = T(a) + T(b)
What vectors a and b break this?
I think it's pretty clear that the | | is going to cause problems, so try playing with negative numbers
0 is usually amazing for counter examples, but not in this case. Always keep 0 in the back of your mind
There's a bit of a mix of notation going on here
What they wrote:
T(x1, x2)
Is a linear transformation acting on the vector (x1, x2)
I wrote T(a + b) where a and b are both vectors in R²
In their notation, that's more like
T[(a1, a2) + (b1, b2)]
$\mathbf{x}=\begin{pmatrix}x_1\x_2\end{pmatrix} \\\ T(\mathbf{x})=T\begin{pmatrix}x_1\x_2\end{pmatrix}=\begin{pmatrix}4x_1-2x_2\3|x_2|\end{pmatrix} \\\ \text{show transformation T is not linear}$
Ok
RokettoJanpu:
$\mathbf{x}=\begin{pmatrix}x_1\\x_2\end{pmatrix} \\\\\\ T(\mathbf{x})=T\begin{pmatrix}x_1\\x_2\end{pmatrix}=\begin{pmatrix}4x_1-2x_2\\3|x_2|\end{pmatrix} \\\\\\ \text{show transformation T is not linear}$
think of T taking in some vector x and spitting out some new vector as defined above. note x_1 and x_2 are the components of x
recall the definition of a linear transformation and show how T fails at being such a transformation
Yeah seeing the vectors as vertical is super helpful
Idk how I would do this on paper
start by reciting the definition of a linear transformation
where x & y are vectors and c & d are scalars
Yeah
pick whatever condition you think is easier to use to show T is not linear, and run with it
can we say that the vector x is orthogonal to the vector n as well?
Here's how I'd do it. Let's work with these two vectors
a = (0, 1)
b = (0, -1)
T(a + b) = T(the zero vector) = (0,0)
T(a) = (-2, 3)
T(b) = (2, 3)
So T(a) + T(b) = (0,6)
But for a linear transformation, T(a + b) and T(a) + T(b) should be the same thing. Since they aren't here, this isn't a linear transformation
@north sierra
I suppose you could get the result faster by abusing T(-a) = -T(a)
Actually, I think I see how you did it now. No need to keep x1 and x2 in there, you're better off using specific vectors for the counter example
Not quite. To write a matrix for T you need to know what it does to a basis for the vector space.
O
Lines 1 and 2 are equal by linearity tho.
The problem yesterday
A=d.I + J
J is a matrix with J_ij = 1
J = P.diag(n, 0, 0, ..., 0).P^-1
@dusky epoch how about this?
a vector x parallel to the plane is defined as x = p + td
doesn't the the left hand side simplify to n * (td)
?
err sorry Im realizing this is a bad question
I should think of (x - p) as orthogonal to n
a better question I want to know is why the need to subtract point p?
isn't n * (x) = 0 sufficient enough?
regardless of the point p in X, the factor of + td will make the line parallel and therefore perpendicular to n
OHHH
shit
thank you so much
np
could I get a clarification on the definition of vector x then ?
(x-p) means it passes through p
then does that mean x = td
or x = p + td
?
what is td?
t is parameter, d is just the direction vector parallel to the plane
the textbook says x = p + td
but if I want ( x - p ) to pass through point p
then x = td? it cant be x = p + td
oof i said something wrong there
sorry I should just post the page
It will probably help you know where im confused
alright
oh okay yea that has literally nothing to do with this.
oh okay well ur right that x - p = td
 well you only know what td is in terms of (x - p). The only thing to take away from that equation is that the solutions (x - p) in n*(x-p) = 0 are all of the lines orthogonal to n.
well you only know what td is in terms of (x - p). The only thing to take away from that equation is that the solutions (x - p) in n*(x-p) = 0 are all of the lines orthogonal to n.
i like your thinking
fuck this book
should I then consider ( ** x ** - p) ** x ** is the direction vector, not the vector equation x = p + td
eh (x-p) is more like a direction vector for a line on the plane. "x" is just another point on the plane. when you plot all of the "x" such that (x-p)*n = 0, you get a plane.
I wont lie I was following and then i got lost lool
but thanks for thinking this out
I will use the first definition you made for me
( x - p ) = td
will probably be enough for midterm tmrw
by "points" I really just mean position vectors. You see, p is a position vector that points to a point on the plane, and x is another position vector that points to another point on the plane. Therefore, (x-p) is the vector that points from x to p (or p to x idk) which means it must lie ON the plane
any line that lies ON the plane must be orthogonal to n, and thus the equation n*(x-p) = 0 follows. Its solutions are all of the position vectors x that make (x-p) lie on the plane.
your brain is big
picture perfect explanation
i can draw it out rn on W sketch
aight xd
not kidding
your explanation was so good i drew that out first try
i love you man
thank you
np glad i could help c:
2
3
@north sierra
Is an example
It's just trying to say that vectors that should be written vertically are not because it's hard to write that
Sorry to throw in my question but how does one go about understanding this?
I have no clue what "k" refers to here

Hello, what does this mean? Is there a certain theorem I have to use? for what does "upper bound" mean? thank you
and you would, in general, be wrong. det(kA) isn't k det(A)
it's k^n det(A), where n is the size of A
this is because $\det(kI_n) = k^n$
Ann:
ah ok
so then in this question
the only operations that would affect A are the times 5, 3 and the row change right?
therefore it would just be 7(3)(5)(-1)?
or would there be no -1?
uh
that sounds dodgy
i'd rather express $\begin{bmatrix} \mathbf{u} \ 5\mathbf{w} \ \mathbf{v} - 11\mathbf{u} \ 3\mathbf{x} \end{bmatrix}$ as a matrix product, i.e. $MA$ where $M$ is a known matrix
Ann:
and then compute the determinant of $MA$ as $\det(M)\det(A)$
Ann:
looks like $M = \begin{bmatrix} 1 & 0 & 0 & 0 \ 0 & 0 & 5 & 0 \ -11 & 5 & 0 & 0 \ 0 & 0 & 0 & 3 \end{bmatrix}$
Ann:
but theoretically
would my method work?
multiplying by a constant 5 to one row would just increase the determinant by a scalar factor right?
i mean
yes
i guess that'd work
it just feels a bit unnecessarily complicated to me
because I get different answers when I calculate them both ways
I get det(M) = 75
so then it'd be 75 * 7
which doesn't seem right to me
oh yeah my bad
it's -75
but then it would still be -75*7 which doesn't seem right
but isn't it 5w?
o nvm
yeah i see it now
ty
yeah it's the same as the other way now
why false? because it can only have 1, infinitely many, or none at all?
yes, assuming your coefficient field is R
what is the difference between using this to prove dependence instead of the c1v1 + c2v2 + ... + CnVn = 0 ?
or the better question is, are both methods acceptable when trying to prove dependence in a set a vectors?
well this is essentially a streamlined way of solving the system of equations c_1v_1 + ... + c_nv_n = 0
or rather

of determining whether it has any solutions other than zero
if we sort the vectors by columns, the augmented part will always be 0, but we can tell if there are any other solutions if we have a column without a pivot, so then the set of vectors is dependent
what would you do if it seems tricky to make a 0 row while sorting the vectors as rows? or should I be able to quickly tell if a 0 row is possible
just do gaussian elimination on it
holy shit
the row matrix method is basically gaussian elimination
your brain is big
by your statement, isn't the row version of this matrix basically the equations laid one by one?
shouldn't I just try to algebraically see if I can delete an equation instead of row in the matrix? it feels more intuitive
Would it work for all possible matrices? So in the example, instead of the matrix I would write x+ 2y, x + y - z, and x + 4y + 2z
and just try to delete one of those equations to prove dependence

I think Patrick Star here means that he can get one equation from the two others to prove dependence
they use the row vectors in the matrix
but that's literally just a row operation
you are right
sorry thanks for that wake up slap idk why I'm afraid to work with matrices
hello again, i need help with complex numbers
i must plot this
but i have no idea how
where z=a+bi
Surely you are able to simplify $|e^{a+bi}|$ a little bit
Tuong:
what why is this in linear algebra
when you'll be doing linear algebra, you'll know it
it's really got a particular flavour
we have matrices too
i like it a lot but im not particulary good at it
i will try tweaking with that e^a+bi
Let A be an r×r matrix and suppose there are r−1 rows (columns) such that all rows
(columns) are linear combinations of these r−1 rows (columns). Show det (A) = 0.
can someone explain the wording of that question to me
i dont understand it
Indeed some of the wording is redundant
Let there be a r - 1 vectors. Then add an rth vector that is in the span of the others. Show the matrix they form has a determinant of 0
oh
i see
just show that
[1,2 - [2,4]
has determinant 0
(the dash implies next row)
I mean, that's one example. You'll want to show this is true for any matrix
Oh ok thank you
Span(v1, v2, v3) = av1 + bv2 + cv3
Let b = c = 0. That implies that av1 is in the span for any a
Span(v1, v2, v3) = av1 + bv2 + cv3
ew


Is a vector space just a set of vectors?
it's rather the other way around
vectors are elements of vector spaces
and the vector spaces have the more interesting definition
@north sierra
A vector space is a set that contains:
- Vectors, that you can add and subtract
- Scalars, that you can add, subtract, multiply, divide.
- A scalar multiplication, that takes a vector and a scalar, and returns a vector
As well, for vectors v, u, and scalars a, b, you get:
- Double distributive property:
v(a + b) = av + bv
a(v + u) = av + au - Associative scalar multiplication:
a(bv) = (ab)v
That's the sparknotes version of a vector space definition. A vector space does not need to be made of arrows, and does not need a concept of distance or direction. However, all vector spaces have a basis and dimension.
I thought the concept of magnitude and direction is baked into the scalars
That's not true no
Your scalars can be from a finite field, which are related to modular arithmetic
lets say im looking for det(A) and in the processes of using row operations I have to switch rows
does that mean that det(A) = -det(B)
where det(B) is det(A) just with switched rows
IF B is A with two swapped rows,
THEN det(B) = -det(A)
Multiplying a row by k also multiplies the determinant by k
im sorry i dont understand that and i can explain why
i had a matrix A, that I wanted to find det(A). So i reduced A into upper triangular form.
In the process I had to multiply a row by 2
the solution i got for multiplying the upper triangular rows was (1 x 2 x -13)
so do I multiply that all by 2
Since you multiplied by 2, the determinant was multiplied by 2.
In order to get the determinant of your original matrix, you have to undo that change - divide by 2
in that case I am able to find the correct answer (-13) since 1/2 * ( 1 x 2 x - 13) = -13
i need to reread some stuff over
thank you for your time
Np. Feel free to ask if you need more!
🙂
I'm having trouble understanding what the question wants from me
What does A(V1+V2) mean?
A is the matrix
V1+V2 is simple addition
its actually quite simple if you know what an eigenvalue/eigenvector is
So it's asking what the matrix from the resulting vector of v1+v2 is?
no
This is a matrix multiplying with a vector
"multiplying with" is a very weird way to say that. I tried
a matrix transformation
I'm aware of how you can multiply a matrix by it's eiganvctor to find eiganvalues
Aren't they just a means to an end for computing large powers
you can compute powers of matrices with eigenvectors and eigenvalues
but thats not what the definition is
so lets take a simple transformation
2I
2 times the identity matrix
this matrix would simply scale everything by two
in this case all vectors would be eigenvectors
because all vectors would be scaled a certain amount in the same direction
and their eigenvalue would be 2
a matemathical way to show this would be this formula
Av = λv
where λ is a constant eigenvalue
Yes
ok
so in the original problem
it says A(v1+v2)
we know that matrix multiplication follows the distributive property
Av1 + Av2
since v1 is an eigenvector of A, what can we do?
multiply the vectors by their respective scalers since they're equivalent?
then you just add the vectors together?
yes
Great, I was overcomplicating things
I looked at the notation and thought it was some function
are you familiar with the properties of determinants? det(AB) = det(A)det(B), multiplying a row/column by n scales the determinant by n, etc....
yes these ones
then just plug in the values
Is this right
I can't really read the writing
c^3, b^2 should also be det(c)^3 and det(b)^2
where do i go from here
if you've properly written it out, you just sub the values in and you should get a constant
can i cancel out detC with detC^3
wdym
when you multiply with the det do you get det(x)^y or det(x^y)
think about it
det(A^n) = det(A)^n
so we know that det(a*b)=det(a)*det(b)
yes
det(a^2) is just det(aa)
Since
det(A³) = det(A)det(A)det(A) = det(A)³
both v helpful 🙏🏽

Oh I do have a question about diagonalization
So I've been calculating determinants up to this point by always reducing it to upper corner form with gaussian elimination
but it seems like to calculate det(x-A) I have to use the long and ugly formula
Is there a way around it
So I have to start using fractions?
I like to do this for a 3×3
That picture is pretty ugly but it's a nice method
Copy over the first two columns and do the lines
That is a surprisingly effective way to remember it
It's a special case for 3×3s. It doesn't work for 4×4s or higher
but with that you can't use the second or third row right?
That's a shortcut determinant of a 3×3 matrix. Use the second or third row?
For example if the 2nd row had two zeros
I just want a cheesy way to solve stuff
I dislike the current formula because it gets messy at 4X4
That's the easiest way I know to get the determinant of a 3×3 if guassian might be messy with fractions, and there's no easy zero rows
With 4×4 I'm pretty utterly lost sry
tfw, well thanks for the image
I doubt they'll test with with a messy 4×4 but if they do god help you
Imagine doing a 5X5 by hand 
I can't
Only one question on final exam, find determinant of 5X5 matrix
Perfect to mess up a single value 
Anyone know how I can begin part b this problem?
I was talking to someone about it and they said that we can choose a vector x where its values are +-1 to make dx as large as possible but I dont see how that would help
Use guassian elimination on it
Which, you're pretty much doing so that's ez
Unless you know the determinant that works too
I need help understanding how to solve this problem
Is it really as straightforward as just plugging in A and A+ SVD’ed into the formula?
Could someone explain why this is true? I read a explanation online on this question but I still don’t get it
the point is that the columns of the n×n identity matrix form a basis for R^n
in fact it's the canonical basis for R^n
do you know what a basis is @north sierra
Ya
bluh
i think it might be easier if you post the explanation you didn't get and point out what part(s) you don't get
If i have a vector PQ = (2i + 2j - 2k), where P = (1, -1, 0) and Q = (3, 1, -2). How do I show which of the points (0, -2, 1), (2, 0, -1), and (5, 3, -4) lie on the vector?
Is linear depdance based on the sum of all vectors or if only at least 2 vectors sum to equal another vector
@south sedge gonna assume the q is asking which points lie on the line spanned by vector PQ. recall how to construct the equation of a line given a direction vector and a single point, then test whether that line passes through the three points
@clever cedar determining linear dependence can be thought of as answering the q "if i have a set of vectors, can i obtain at least one of the vectors by simply multiplying some of the other vectors by some constants (a linear combo of these vectors) and adding em up?" in some cases a vector can be obtained through the linear combo of just two vectors, however in some cases it very well may take more than a linear combo of two vectors. think back to the equation presented in the definition of linear dependence
Oh i see thank you
The reason i ask is based off of determinants
So only two of the vectors need to have a sum resulting in another vector in order for det(A)=0
@south sedge in the last step, you flipped the sign of one of the components of the direction vector
Not all of the vectors
@clever cedar you better define what A is. i can only assume since you're talking of linear dependence (LD) that A is the matrix whose columns consist of the set of vectors you are testing for LD (probably a set of n vectors belonging to R^n since det only works for square matrices), anyone else would have no idea what you mean. if det(A) = 0 then its columns are indeed LD
Yeah sorry A is just a square matrix
oh, fixed my mistake. I only know how to check if the points lie on the line L 😦
you have the equation of a line written in terms of only a single variable t, so it shouldn't be too hard to check if there exists a value t that satisfies the equation at each of the three points
For example
this doesn't tell me if the point lies on the line spanned by vector PQ, it only tells me that the point lies on the Line L
according to your sketch, L IS the line spanned by PQ @south sedge
but L spans farther than the vector PQ. So something lying on L doesn't imply it lies on PQ
the span of PQ is the set of all constant multiples of PQ, which generates a line L which runs in the same direction as PQ but stretches infinitely far beyond PQ
what if the question would be "Which points lie within the length of PQ?"
then you should have specified that earlier
I would have referred to the question but it's not in english, so things got lost in translation :/
still, it's nice to construct the equation of L as if it were an infinitely long line and solve for t as normal for the three points, but now you add the restriction that t must lie between two particular values
So if I want to try it for point (0, -2, 1). Then t is between P(1, -1, 0) and (0, -2, 1)?
first find what t is for points P and Q
Anyone know how to calculate number of basis vectors of an n dimensional VS with entries 1? So for example for a 2 dimensional vector space it would be 3 since we can have {<(1,0), (0,1)>, <(1,1),(0,1)>,<(1,1),(1,0)>}.

what have you tried
well ive been just trying to go through my notes, and trying to find a equation like that
thats not rly trying anything, try thinking about what u should do in this problem
I mean like ik that D9f) = 2f' + f''
what?
derivitive of f? whats f?
idk
if u dont know, then whered u get that D(f)=2f'+f''??
like i need to know what u think u need to do and what u have tried
,rotate
,rotate
yeah no this is useless
as i said, dont refer to your notes
just look at the problem and tell me what u think
umm idk, im struggling to even get my head around this stuff
wwell what information do you have given in the problem
that $xp''(x) = 2p'(x)$
B1GW0LF:
and that V is a subspace of the Real-vector space R3[x]
right thats the critical part
V is the set of all real polynomials
so set of all polynomials with degree less than 3 right
can we right a general form for p(x) from that
i mean wasnt it given as xp''(x) = 2p'(x)
like just from the fact that p(x) is a polynomial of deg<3
can we write down a form for p(x)
yeah, also sorry meant deg ≤3
ohh ok
but the idea applies, that is exactly what u need
so p(x) = a + bx + cx^2 + dx^3
ye
so after i have found p' and p'' i then plugged those into the given equation and i go that they did indeed equal one another
yeah, try it an then tell me what u get
yes, and so what must b and c be
not sure
well c and b are zero right
yes
do we have any conditions on a and d, or can they be anything
exactly
now what are the basis of this? and prove its a vector space, i think you could do this on your own easily
yeah
so like the system is an abelian group, multi is associative, right/left distributive and multiplication by 1 is the identity
wait what no those arent the axioms for vectorspace, its not a group and multiplication is not something in the axioms for them
ah damn it
well u could look em up to remember if u forgot

so are the basis for this (a,3d) ?
hmm no
hmm
i must be having a massive brain fart rn
take some time to think about what a basis means, its fine
I mean ik that "A basis for V is a list S: v1,v2, ... of elements of V such that X= {v1,v2,...}
is a linearly independent spanning set of V
ok so what forms the basis for polynomials
wait is it, like (a, 0, 0, d)?
whats the basis of a vector (a,b,c,d)

@torn hornet there is no such thing as "basis of a vector"
ok, basis of the vector space R^4, whose vector look like (a,b,c,d)
(a) there many possible bases one could write down for any given vector space and (b) "look like" is way too vague
well giving any basis is good enough for this exercise, the point is for him to see how basis work
ok
rip
if u cannot find a basis for R^n, then u need to review
yea ima do that real quick
I'm having trouble understanding what the question is saying again
For part A, is the rank (I-A) part supposed to be the integer rank of the matrix
In that case isn't rank (I-A) the same as rank(A)
and wouldn't it always equal n
"integer rank" as opposed to what other kind of rank
That was redundant wording
no like what do you mean by "integer rank"
and where tf did lambda go in your messages
and no rank(λI - A) isn't always n
I wasn't sure how to produce the symbol
Can you give an example of when rank(lambdaXI-A) is not equal to n
X?
Times
The asterisk doesn't work
please never use x, ESPECIALLY CAPITAL X, for multiplication again
also, apostrophe?
shh
anyway w/e
ok simple example
let A be the 5 by 5 diagonal matrix with entries 2, -7, 6, 4 and 11, in that order
and let λ = -7
then rank(λI - A) = 4
how could I solve this without having to expand it out fully?
polar form helps
I am trying to decipher what the outer norm is. Is it just the summation of the square of all non diagonal entries in a matrix?
That's how I interpret what's written
Although not the square of the entries, square of absolute values of entries
(Not the same if entries are complex, non-real)

So im kinda confused on this one here
I understand that it should be true but idk how to prove it
how do you show that a set is a subset of another set?
if you don't know how to prove it then you don't understand it
Ann i dont mean to come across as rude, but every time you say something to me it the tone always feels like you are trying to put me down, and not actually help me understand what im trying to do
Like I understand the basic notation that in the question it has both a W1 in both brackets on the left hand side
and that has been taken outside of the brackets on the right as if it is a product of both (W1 intersection W2) + (W1 intersection W3)
I understand that if you have (W1 intersection W2) union (W1 intersection W3) that would be equal to "W1 union (W2 intersection W3)
sum is not the same as union
and making an analogy of this sort really doesn't constitute understanding imo
it's reminiscent of one of the distributive laws of set theory sure
but it's not the same
also, you have still not answered @sonic osprey's question, which was meant to guide you to the answer to yours
@atomic flint
im going back to basics and looking at the previous stuff, but its all confusing me
how do you show that a set is a subset of another set?
let's go back to the very very basics: do you know what $A \subseteq B$ even \textit{means} (where $A$ and $B$ are sets)?
Ann:
That means that A is a subset of B
It means that all of the Elements in A are also in B but B has more elements
im pretty sure
no
first off, "B has more elements" is vague
but even if it's interpreted as "there exists an element of B not in A"
then what you wrote is the definition of A being a proper subset of B
and that's a stronger condition
2tru
$A \subseteq B$ means that every element of $A$ is also an element of $B$.
Ann:
$A = B$ iff $A \subseteq B$ and $B \subseteq A$.
Ann:
anyway, to go back to your problem
you need to prove $(W_1 \cap W_2) + (W_1 \cap W_3) \subseteq W_1 \cap (W_2 + W_3)$
Ann:
so in other words you need to prove every vector in $(W_1 \cap W_2) + (W_1 \cap W_3)$ is also in $W_1 \cap (W_2 + W_3)$
Ann:
what do you mean by "triple variables"
as in W1, W2 and W3
yes there are three subspaces we are working with, so what
if you think there is a special procedure to be followed whenever there's three unknowns of the same kind no matter what setting this happens in, then you're wrong
ok
how do i go from there
like how do i show that $(W_1 \cap W_2) + (W_1 \cap W_3) \subseteq W_1 \cap (W_2 + W_3)$
B1GW0LF:
like what do i do first
to show $(W_1 \cap W_2) + (W_1 \cap W_3) \subseteq W_1 \cap (W_2 + W_3)$, you show that every vector in $(W_1 \cap W_2) + (W_1 \cap W_3)$ is also in $W_1 \cap (W_2 + W_3)$!
Ann:
Let $x \in (W_1 \cap W_2) + (W_1 \cap W_3)$ be arbitrary.
... \ ... \ ... \ ...
Therefore $x \in W_1 \cap (W_2 + W_3)$, and hence $$(W_1 \cap W_2) + (W_1 \cap W_3) \subseteq W_1 \cap (W_2 + W_3)$$ as desired.
Ann:
there i've laid out the very beginning and the very end of the proof for you, now it's on you to fill in the details
if this much isn't obvious to you then i feel you're really lacking in set theory fundamentals
...
im trying to find the theory now,
ik which theory it is but cant remember the exact thing off the top of my head
you should have set theory down cold if you want to progress meaningfully in linalg
where linalg is to be understood as distinct from mindless matrix-bashing
ik that i should have everything down, but my course only started on this stuff for the first time 3 weeks ago
ignore that
how come
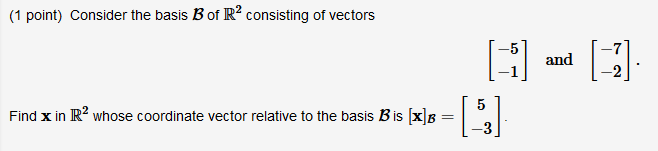
I am having trouble with this question, I thought it was a matter of finding how to combine the basis forming vectors to get the other vector. So I ran through an augmented matrix and solved for the values getting -31/3, 20/3 but it doesn't get me the correct result.
Can someone explain how I am supposed to solve this? I'm not even sure what the [x]B = ... means
https://i.imgur.com/mZbFaQf.png
and then uh
you fail to distinguish between capital U and lowercase u in your handwriting at all
and then W3 comes in completely out of left field in the second paragraph
so that's kinda... where the entire thing breaks down
so its wrong?
it's bordering on the nonsensical but also wrong yes
how do i correct it
redo it from scratch
ok, but like what do i do different this time
unfold definitions one by one
what is the definition of the sum of two subspaces of a given space
what does it mean for a vector in a vector space $V$ to be a member of $X+Y$, where $X$ and $Y$ are subspaces of $V$?
Ann:
if you can't answer this question then you don't know what the sum of two subspaces is

so i have found this
but since it is minus instead of plus does that change the C variable
is there really that much of a different between the substraction and addition in the (B-C) element
...
i'd say you really are clueless, but you'd accuse me of putting you down!
subspace addition is a specifically linear-algebraic operation!
Ive been trying to figure this out for the last 4 nearly 5 hrs so at this point i am clueless
and you CLEARLY don't know what it is nor are you making any productive effort to patch that hole in your knowledge!
do you not have any class notes or a textbook?
also, maybe you should take a fucking break if you've been at this for 4 hours straight!
ive looked through it and it doesnt state anything about it, this professor has a done this sort of stuff befor
i took a break from this yesterday and the day before
but i havent figured it out
lecture notes
it is impossible that the lecture notes do not define subspace addition anywhere
what topic do they start at

ok and are you SURE it doesn't mention "subspace addition" or "subspace sum" anywhere at all
bc i refuse to believe that
how would I solve a) , using what method or what should be my first step to get started?
@dusky epoch
@atomic flint the page you sent looks like consequences of a definition
The definition is something like this: If U is a vector space and X and Y subspaces to U, then we define V:=X+Y as the set of all vectors v that can be written as a+b where a is in X and b is in Y
The page you sent confirms that V is also a subspace of U
Exercise 2c)
Let f:R4 ->R4 and g:R4->R4 be linear functions so that V=im(f) and W=ker(g)
C) determine explicitly two linear functions f and g so that ker(f o g)=W
@pliant thistle That's not linear algebra, but just use the substitution t=x^2 to solve it
weird bc it’s in my linear algebra exercises
Yeah cos that’s non uni algebra, linear algebra assumes a different connotation after
Anyways anyone know how to solve the above?
I can't read everything
Aoikunie
@uncut forge i translated
Does f and g have to be from R4 to R4
Yes

No I don't think so
I'm not sure if I read everything correctly though, very tired right now
I need help xd
To show something is a subset of something else. Take an arbitrary element from the first set and show it belongs to the second set too
Anyways I’m updating the translation
@lone quail easiest I can think of is to just let f be identity
And let g be the function that maps (x,y,z,t) to (x+2y+z,z-t,0,0)
I’m pretty sure you cant do it that way
Because you would have to consider the bases of W
And expand those bases
To R4
Instead
Could you show me an example? I really have no reference
I never did any similar exercise
I really wouldn’t know what to do
I gave an example above
Yeah but I don’t get why that would yield me nay result
Because the only element that gets mapped to (0,0,0,0) is elements from W
And f is just identity so fog=g
What do you mean identity
Ah wait I missed your first part
About V=im(f) and W=ker(g)
Identity is the function that does nothing
But gotta go now, sorry
Rip
Thanks anyways
Let f:R4 ->R4 and g:R4->R4 be linear functions so that V=im(f) and W=ker(g)
C) determine explicitly two linear functions f and g so that ker(f o g)=W
How to solve c)? (I reposted for ease of viewing)
Hello all
<@&286206848099549185>
a(1,-1,0)
b(2,0,1)
Given a vector c such that a ^ b • c = 4, calculate the volume of the parallelepiped formed by the vectors:
−b, 2c and a.
Can someone help me?
<@&286206848099549185>
so the volume of the parralelepiped is the determinant of the 3d matrix
when -b 2c and a are concatenated
what is a^b
yeah
how does one take an exponent of a vector
idk what that means
is that supposed to be a cross product??
assuming it is, then (a x b) * c is just the signed volume of the parallelepiped made by a,b,c
(a x -b) * 2c would just be -2 (a x b) * c = -8
Its the external product
@steady fiber and @wintry steppe
I haven't learned about determinants yet.
it's called the scalar triple product, and it's quite famous as the volume of a parallelepiped
if you have (a x b) * c, and that gives the volume of a parallelepiped
with edges a,b,c
and you know the volume of that is 4
let's say you scale one side by 2
then the volume doubles
essentially you find the area of the base with the cross product and the height with the dot product
and you scale another side by -1
and then multiply
Is it possible to find out c?
How?
yeah you can
I don't think it's possible to find a unique c
yeah not unique
you can find a c, but not a unique c
but it doesn't matter
what c is
just the formula matters
If i scale another side by - 1 it would be just 8?
Niceee i think i get it
yes
its just the orientation
think of it like the number line
-1 is negative cuz it is to the left of 0
but it's distance from 0 is 1
the volume is still -8
the signed volume is -8
the volume is 8
ever so slightly different things
and the negative sign just has information about how the three sides are oriented
Yes i get it
Its because the modules
In my country we use the ^ to represent the external product
@steady fiber
@wintry steppe
Portugal
ah
Do u study?
yes ^ is the external product symbol everywhere
I just didn't realize ^ was that symbol
also typically cross product is used there
The IV quadrant is one such that x is positive and y is negative.
We know tan theta is -12/5
But we know that tan is: sin/cos
so cos theta is 5/13?
rudy:
rudy:
And thats cos^2 x
oh ty
So clearly
so u have to square root?
oh ok ty
Have you done things like this before?
Did you know sin^2 x = 1 - cos^2 x
hii, i have a little problem, someone can help-me ?
here is
$H\text{ is a subspace of U}\newline
H^\bot\text{ is orthogonal subspace of H}\newline
R_H(v)=
\begin{cases}
v, if\ v\ \in H\newline
-v, if\ v\ \in H^\bot
\end{cases}$
i have to show that is a linear transformation
well, you mean "extend it to a linear transformation"
if f(x) is linear transformation, then f(ax+y)=af(x)+f(y) for all a in base field
@wintry steppe
r41nm4ker:
hmmmm
i'm confused
i tried show this
through cases, but with v in H and H orthogonal i does't figured how works
is it just me or is that so small it's unreadable?
okie better ❤
For the record, the column space of a matrix is the span of the vectors in the columns and the row space is the span of the vectors you’d get by looking at the vectors you’d get from the entries in each row, right?
@gilded harbor can you explain how you got to 146875?
these are driving me crazy
can someone spot what I'm doing wrong?
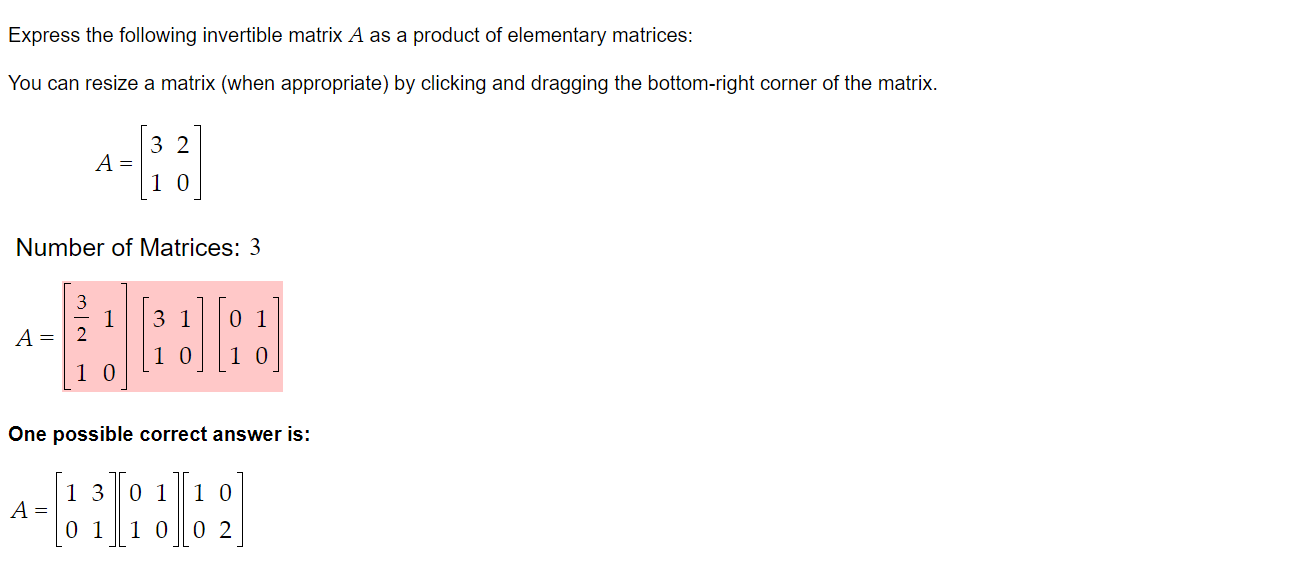
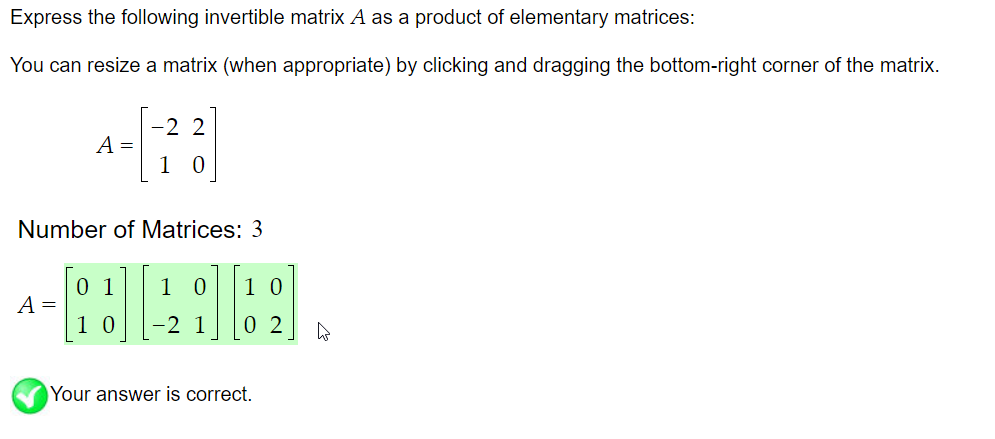
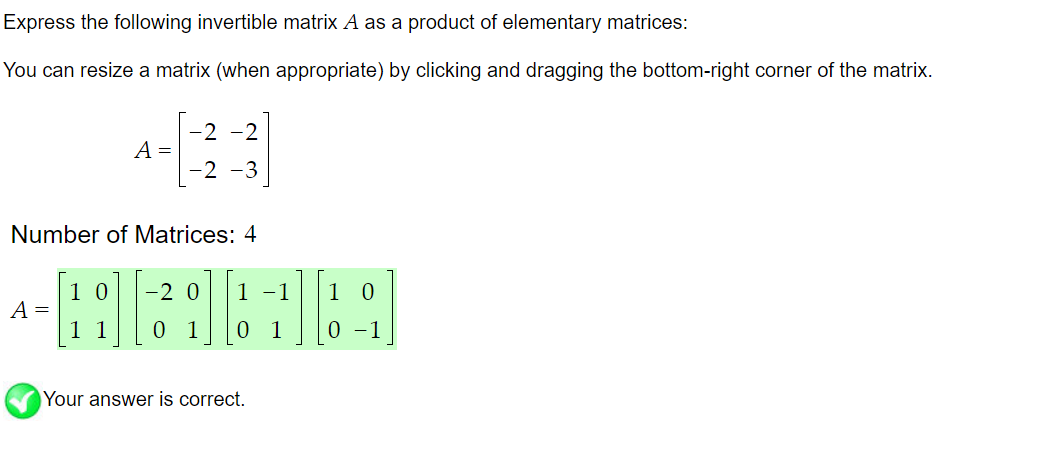
These are elementary matrices
@gilded harbor this is really the wrong channel for that. #precalculus
oh that's precalc?
@atomic flint i was asleep when you sent that
but this isn't at all what you were asked to prove
you weren't asked to prove that either side of the inclusion was a subspace
@carmine terrace the antidiagonal is 1 for some reason. Other than [0 1][1 0], those are not elementary matrices
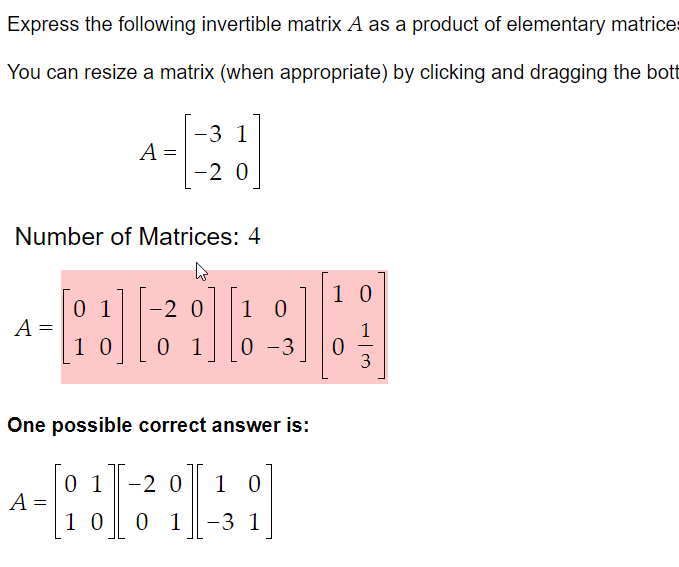
I've been at this for 2 hours and I haven't gotten any of them right
what I was doing wrong at first was for every E^x I was following what I did for the previous one
instead of restarting with the original identity of
1 0
0 1
for every step of the RREF
you construct an elementary matrix for each step, yes
but even doing that way I'm still doing it wrong
but why are you appending it to the matrix?
just for me to keep better track
that's hte last one i did
this is driving me insane, not a single one correct so far
I'm not sure too be honest, considering I'm getting them wrong
I've been watching youtube videos
and they just do them as regular row operations
for both the E^x and the regular one
regular matrix*
Then the Identity is I = E^xA and we use the inverse to isolate A
Okay, since we are dealing with rows, we need to left multiply these elementary matrices to perform that operation
what do you mean with left multiply?
multiply the elementary matrix on the left of whatever you want to do the row operation on
R1+R2 is identity matrix + a 1 somewhere else
I'm going to be very honest. I feel dumb, I'm having a hard time following. what's the A1 somewhere else
not A 1
A "add a row to another row" is identity matrix with one extra nonzero entry
@carmine terrace
so just regular row operations?
idk what you are asking about
I'm just super confused. On the work I did where did I go wrong?
I just have no idea.
I'm doing regular row operations on the Matrix that I need to invert
and whatever I do to that matrix, I do to the Matrix 1 0
0 1 which I think is what is the elementary matrix
but I'm not 100% sure
that is an elementary matrix you constructed, yes
so do you see what happens when you add a row to another row for the identity matrix?
yes it changes it
the goal is to reduce to the same form as the elementary matrix
I just got my first right answer in the past 2 hour 40 min

but IDk what I did wrong on the previous one.
I did it the same way I've been doing it
and I thought that If I multipled the inverses of Elementary matrixes, that they should multiply to the original A matrix
Let me try to write this out properly
awesome thank you. I would greatly appreciate it
$E_1=\begin{pmatrix}
1 & -5\
0 & 1
\end{pmatrix}\
E_2=\begin{pmatrix}
2 & 0\
0 & 1
\end{pmatrix}\
E_1^{-1}=\begin{pmatrix}
1 & 5\
0 & 1
\end{pmatrix}\
E_2^{-1}=\begin{pmatrix}
\frac{1}{2} & 0\
0 & 1
\end{pmatrix}\$
Element118:
Element118:
because elementary matrices are applied on the left
yes
$E_2E_1A=I$, so left multiplying by $E_2^{-1}$ we get\
$E_2^{-1}E_2E_1A=E_2^{-1}$, so\
$E_1A=E_2^{-1}$, so left multiplying by $E_1^{-1}$ we get\
$A=E_1^{-1}E_2^{-1}$
get it?
yea, I understand the general ide abehind it
Element118:
because the way you wrote it, it looks like you aren't even aware matrix multiplication is noncommutative
ah i see what you mean now
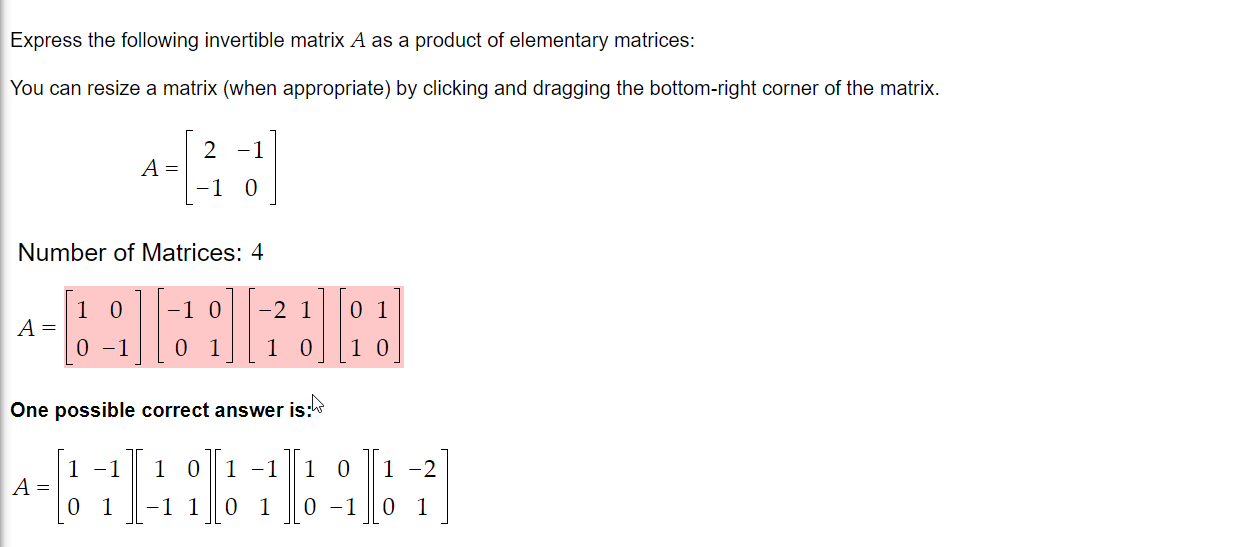
The third matrix doesn’t appear to be an elementary matrix as it’s a product of two elementary matrices (one that adds -2 times row 1 to row 2 by one that switches the first and second rows)
I tap out, 3 hours and I got only one problem right RIP I don't get it
@carmine terrace it takes practice
Let's write those labels as subscripts, shall we?
@carmine terrace
How did you get the matrix for adding 2 times of R1 to R2?
@carmine terrace
@pallid swallow i was away from my computer for a bit
I didn't catch that mistake at the time
it seems I got the wrong E matrix
I'm going to restart another one and see how it goes
okay
things are looking up
Imma do 2 more and see if I can make it three in a row
sure
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ah bless jesus
when I choose the row operatoin
oh nvm I see what I did wrong
$\begin{vmatrix}a^{k_1}&a^{k_2}&a^{k_3}&\cdots&a^{k_n}\end{vmatrix}$\
$a^{k_1}\begin{vmatrix}1&a^{k_2-k_1}&a^{k_3-k_1}&\cdots&a^{k_n-k_1}\end{vmatrix}$\
$a^{k_1}.a^{k_2-k_1-1}\begin{vmatrix}1&a&a^{k_3-k_2+1}&\cdots&a^{k_n-k_2+1}\end{vmatrix}$\
$a^{k_1}.a^{k_2-k_1-1}.a^{k_3-k_2-1}\begin{vmatrix}1&a&a^2&\cdots&a^{k_n-k_3+2}\end{vmatrix}$\
...\
$a^{k_1}.a^{k_2-k_1-1}.a^{k_3-k_2-1}\cdots.a^{k_n-k_{n-1}-1}\begin{vmatrix}1&a&a^2&\cdots&a^{n-1}\end{vmatrix}$\
$a^{k_n-(n-1)}\begin{vmatrix}1&a&a^2&\cdots&a^{n-1}\end{vmatrix} > 0$\
Nguyễn Thành Trung: