#point-set-topology
1 messages · Page 18 of 1
Like okay you have a small ball about γ(0), use that to correct the path on like [0,ε] to a straight line, then keep going
oh i see
so I AM picking an epislon so that the difference of any two points in the subdivision are less than that radius
ye ig lol
Maybe a stupid question but can we write $$[0,1] = \bigcup_{i \in I} [a_i,b_i] $$ where I can be infinite ?
Julien J

take all a_i to be 0 and all b_i to be 1
sorry forget to mention that a_i and b_i cannot be 0 and 1 respectively
well no then the union won't contain 0 or 1. at best you'll get the open interval (0, 1) (by taking, for example, a_n = 1/(2n) and b_n = 1-a_n)
don't think you can, unless I'm missing another pathological counterexample
if the point 1 belongs to the union on the right, it has to belong to one of the sets being unioned over
no way around that
yeah seems very logical
I am trying answer this by an argument using simpley-connectedness of [0,1] but I am not really getting anywhere... Can someone give some help ?

is the torus simply connected?
this is overkill btw
you can give a much more elementary argument. my favorite trick is to think about what you have to remove from one space to disconnect it but not the other
I am trying to show that it is not but I am not succeeding
so do the easier argument
Mmmh I can remove {1} from [0,1] but not from S^1 ?
those aren't the spaces you're working with, though
you're working with [0, 1]^2 and (S^1)^2
can we get the same argument with the product or something similar ?
i suggest you argue with pictures
maybe drawing a picture helps
lol
oh come on
great minds think alike
i already deleted two of my messages and reacted with  instead because you said it while i was still typing
instead because you said it while i was still typing
and now another snipe
think of an open set of [0, 1]² as a subspace of the product topology of R² and see if it can be mapped by a continuous function to S1 x S1 (if the resulting set will be open as well)

dunno if it helps

there obviously exists a continuous map from [0, 1]^2 onto (S^1)^2, so i don't see where you're going with this
[0, 1] has one onto S^1 so take squares
the question is asking whether the spaces are homeomorphic; whether any such map can have a continuous inverse
A possible open subset of [0,1]^2 can be [0,1) x [0,1) right ?
sorry, but I was thinking that maybe we need f(U) open whenever U is open in X for continuous f to be a homeo
I suggest you think more about what tterra said
that's definitely the easiest way to do it
i'll elaborate. [0, 1]^2 is a square and (S^1)^2 is a torus. what can you remove from the square to disconnect it? what if you remove that from a torus?

I can remove the point (1,1) for example for the square and a circle for the torus
Ig it's sufficient to show [0,1] is not homeomorphic to S^1?
that's basically the same thing
that's not going to disconnect either of them
so it says nothing about the spaces
ah yes you are right
I can remove 2 points then
nope
[0, 1]^2 is a filled in square, it's not just the boundary
what do you need to remove to disconnect this thing?

(pretend it's completely filled in)
oh I am tired I forgot this is filled 😅
I remove the diagonal for example nah ?
that works
so you can disconnect [0, 1]^2 by removing a line. can you disconnect the torus by removing something homeomorphic to a line?
no because we will need 2 circles to disconnect a torus ?
one circle does not disconnect our torus
you could disconnect the torus with just one circle
just have it cut off a little part of the surface
how ?
yeah, that's what he meant with cut 
rather than winding around the whole thing
but the solution i have in mind is indeed that removing a line (something homeomorphic to a line in R^2) will not disconnect the torus
you can think of it as the same solution to this, but everything has the dimensions up by 1
sorta
maybe.
yeah I understand thank you
if you want to use simple-connectedness, just note that the torus has some loops that can't be deformed to a point on the torus
in symbols: pi_1(square) = 0 and pi_1(torus) = Z^2
yeah okay I get it
To be sure (0,1) x (0,1) is open in [0,1]^2
true but i don't see how it's relevant
no sorry just an independant question nothing with the previous discussion
i remember that $\sup A+\sup B=\sup(A+B)$, but it won't necessarily be true that
$$\sup_{x\in\bR}|f(x)-g(x)|+\sup_{x\in\bR}|g(x)-h(x)|=\sup_{x\in\bR}(|f(x)-g(x)|+|g(x)-h(x)|)$$
right? can we at least say that it's $\geq$?
nilpotent nix

I think that's the triangle inequality on a space of bounded functions with uniform norm
yeah i'm trying to prove d is a metric on bounded real functions but i'm not sure about my proof

Yeah, the other two properties are trivial to check
yes you can say it is greater than, the sup of the stuff you are taking over is a subset of the original one
maybe this do the trick, but yeah it is good to make sure whether the equalities or inequalities hold for all functions
I mean greater than in here is correct
okay great thank you both! @untold lily @stark fog

It depends on context.
I will try to figure it out from the rest then 
probably D2 centered at origin whereas B can be centered anywhere
or maybe D² for the unitary disk centered at the origin, then B any disk of any radius at any point

Is the union of D_1(0) with D_1.1(2) open? It's from complex analysis but is certainly a topology question, which I'm not super versed in. D_1(0) is a disk of radius 1 centered at 0, if notation is not clear.
in Hatcher's description of RP^n as a cell complex, he first identifies it with S^n/(v ~ -v) and then says that this is equivalent to the quotient space of a hemisphere D^n with antipodal points of its boundary identified. how does he get from the first to the second? isnt a hemisphere of D^n equal to saying the last coordinate is greater than or equal to 0 (when embedded in the obvious way) so then antipodal points of its boundary would only lie on the "flat part" that is D^{n-1}? and if so how does this equivalent to the quotient space from earlier?
you are discarding the lower open hemisphere
since it's being quotiented out anyway
and identifying the remaining part of the upper hemisphere, which is the boundary D^n-1
Another way to think about it is you are quotienting in 2 steps, first when the last coordinate is <0, this step will leave you with a closed hemisphere. Then you quotient when the last coordinate =0. That's exactly the boundary
Another description is that the map D^n -> S^n/(x ~- x) is a surjective closed map (clearly surjective and closed as domain compact, codomain hausdorff, say) and it identifies points iff they are antipodal on the boundary of D^n
Also more generally we are taking a closed saturated subset ig so it should work
How can you write the lein bottle as an S^1-bundle over S^1
Take the mobius strip as a line bundle over S¹ and 1 point compactify all the fibers
that gives RP^2
oh
Right
Well you know the polygon you use to glue the Klein bottle
Hold up I forgot which way the gluings go
Like one pair is the same way and other the wrong way right?
yes
Hmm then I don't see why this don't work
But you take that polygon
And you treat one of its edges as the S^1
the 1-point compactification is the same as the Thom space (for compact base spaces)
and the Thom space of the mobius band is definitely RP^2
And projection onto that edge as the bundle map
Thom space also identifies all the points at infinity
yes
but for compact base spaces
you don't need to first do it fiberwise
you can just 1-point compactify the total space
but yes in general you should compactify fiberwise first and then identify the points at infty
Yeah but I'm 1 point compactifying fibrwise
Does that give the same thing?
Really doesn't seem like RP² to me lol
are you 1-point compactifying fiberwise
but then not identifying the points at infinity
no RP^2 is not
RP^2 is the Thom space
Ye
this will still give RP^2
so a function is continuous iff the preimages of an open set in the codomain is open, right? then how does one negate that definition? like would that mean there is an open set in the codomain that has a preimage that is not open?
Yes
yes, for example a function from the real numbers with standard topology to the real numbers with the lower limit topology
so im still trying to show R^n \ {0} for n > 2 is simply connected. For the path connected, if I pick two points that are not multiples of each other then i can use the straight line homotopy right? And for two points that are scalar multiples of eachother, can I pick a third point which lies say above the origin, then straight line homotop from the starting point to this third point then to the terminal point? so in R^3 say (x1,y1,z1) and (x2,y2,z2) are two points that are not scalars of eachother then the path t(x2,y2,z2)+(1-t)(x1,y1,z1) works , if however theyre scalar multiples then 0 is between them then can i straight line homotop (x1,y1,z1) to say (x1+\epsilon,y1+\epsilon, z1+\epsilon) then from this point to (x2,y2,z2)?
running 2t from point 1 to the epsilon point and 2t-1 from the epsilon point to the 2 point?
or should I map (x1,y1,z1) to (\eps,\eps,\eps) then to (x2,y2,z2) as (\eps,\eps,\eps) is just hovering above the origin
just do the linear homotopy thingy
but what if the two points are scalar multiples of one another, then 0 lies on that line segment between them..
so do i straight line it from (x1,y1,z1) to (x1+\eps,y1+\eps,z1+\eps) then to (x2,y2,z2)?
idk man tbh I'm too tired to read the notation, idk why I responded in the first place I'm sorry
lol its cool
tbh I don't see what the problem is. For path connected, just do a line. For trivial fundamental group, just do a linear homotopy
sorry i meant R^n \ {0} where n >2
oh bruh
I mean I guess that works for path connected? Like you pick a third point, like you said
for the simply connected part I would look at what R^n\0 is homotopy equivalent to
For the path connected it suffices to do n =2 and then it is an easy proof by pictures
😎
i wanted to show simply connected just by brut force if possible by having the loop trace along the boundary of some epsilon ball about the origin as the path nears the origin, i know that R^n \ {0} is homotopy equiv to S^n-1 x (0,\infty) and the fund group of prods is the prod of fund groups
oh okay yeah I'm sorry
so my idea for path-conn works ? have the first point get mapped to some point plus epsilon of original point?
and then to the terminal point
I don't think doing simply connected by hand will be too tractable
lol
Mostly because it is hard enough for spheres and those r htpy equivalent to these
does my idea work for path-connectedness using a third point and labeling it (x1+\eps,y1+\eps,z1+\eps)
Question, can two closed (nonempty) sets form a partition of a connected topological space? This isn't hw, just curiosity related to something else.
what's the definition of a connected topological space?
it happens to everyone
If there exists a homotopy of paths between f1 and f2, how does one show there exists a homotopy of paths between their inverses?
Can you express the inverses in terms of reparameterizing the original function?
I see, precomposing the homotopy with the parametrization yields the required homotopy.
Uhh what do you mean by that
So if H is the homotopy between f_1 and f_2 and since f_i^(-1)(t)=f(1-t), then H composed with p gives a homotopy between the inverses, where p is the reparametrization p(t)=1-t
Yeah
can i get some pointers on this, im not sure how to see this

tbh im not even sure i can really see a projective plane
Do you know the fundamental polygons?
Try the m,n=1
Also, have you learned the classification of surfaces?
this is chapter 1 of massey's book
which covers that
so im still grappling with it
if i can bother you, can we talk through what a projective plane is first
the text has this but i dont see how this corresponds to the standard form abab

i mean that would be nice sure
im assuming this is different than the platonic solids?
So you didn't understand the above text?
are you referring to the projective plane one?
No
then wdym
Do you have the class and classification concept?
all i have is classification of surfaces
S^2, T # ... # T, and P # ... # P
and the notions of triangulation and the euler characteristic
okay.
I will explain.
if two points are on the same line through the origin, we will say that they are in the same class
so

in mathematical expression.
got it?

so when we think about the RP1, we can think the circumference with the radius 1.
Do you know what the RP1 mean?
@odd flame Are you there?
yeah im here
trying to read the book at the same time is all
i havent seen that notation but i probably know what it is
i can guess what that is yeah
when we consider RP1, we give the 'homogenous relation" in R2 (2-dim real linear sphere)
If two points are on the same line through the origin, we say that they are in the "homogenous relation"
got it?
Good.
And we consider all the points in the "homogenous relation" as one point.
got it?
so it suffices to consider one hemisphere right
yeah, but not exactly.
First let's consider about the Rp1
so the semi-circumference
okay?
with the radius 1.
okay

yeah i see that
Do you understand my image?
we have to identify the (1,0) and (-1,0).
Because they are in the same class.
yeah.
so in the case of Rp2, as you know we think the semi-hemisphere.
but we have to consider about the circumference on the xoy plane.

i follow so far
So Do you understand the whole meaning?
Sorry but what do you mean?
i'll be right back i wanna write some stuff down
what do you think about this description

also @hollow wigeon im feeling better about the projective plane
could we go back to the question from before

this was the original question
i know that a torus summed to a projective plane is P # P # P (let P be a projective plane)
but im not sure about n,m many if that makes sense
isn't it just a double torus
or one w two holes
i dont know the formal name for it but i know what it looks like

what does it have to do with what uni i attend
Then pls say first.
what is the result of sum of tow toris?
what is the result of sum of two projective planes?
i know the two tori give a "double tori"
i have the planar model for it in my notes
and i know the sum of n projective planes is represented by a 2n-gon
Good.
In topology, Imaginary is very important because it is the abstract math branch.
I will right back.
@hollow wigeon could it be enough to use that T # P = P # P # P
if you have m tori and n projective planes
god i wish
but ok if m = n
you get 3n projective planes summed to each other i think
connected sums should be commutative
if we have more tori than projective planes, m > n
you still just get some connected sum of projective planes
I think you misunderstand the problem.
possibly
we have mtori T#T#T#T#T.....
and P#P#P#....
And we are going to glue two objects now.
right?
it's asking what the connected sum of those two surfaces is, no?
isn't that just the connected sum
oh i guess not necessarily
oh i think my picture is wrong too actually
T#P should be a 6-gon
is the act of "gluing" not necessarily the same as a connected sum
Maybe, but I think we have to think about the order.
Do you think T#T#P#P is equal to T#P#T#P?
I don't thinks so now. I think you have to check about that.

MathOverflow
I'm looking for a detailed reference about connected sums. I'd like it to contain a proof that a connected sum of connected surfaces is independent - up to homeomorphism - of the various choices in...
As a mathematician, we have to consider all the possible conditions, even the 1% possiblility.
it's commutative
Okay. thanks.
My major is the Algebra and geometry.
not the topology.
But I am interested in the topology.

this is the problem if you wanna take a look
i think it's just different numbers of copies of P summed to each other tho

ryuuuuuuuuuuuuuu
Why though
holy shit moldi
sub seppp
wanna look at my shitass question pls
Nah looks shitass
i think it's just P # ... # P a certain number of times depending on if you have more tori or more projective planes
but that feels too easy
idk

embed failure moment
and now it embeded?
ok discord
alg topology is proving hard moldi
I feel like it is the Klein bottle because if you start with the mobious band and glue the "opposite edges" together you get the Klein bottle, right? And that's what fibrewise 1-point compactification is doing
It is so easy
are you saying that because youre cracked
$\amogus$
sebbb

@gritty widget https://en.wikipedia.org/wiki/Klein_bottle#3D_pinched_torus_/_4D_Möbius_tube this is what I am seeing lol
In topology, a branch of mathematics, the Klein bottle () is an example of a non-orientable surface; it is a two-dimensional manifold against which a system for determining a normal vector cannot be consistently defined. Informally, it is a one-sided surface which, if traveled upon, could be followed back to the point of origin while flipping t...
Why not working for me
lol
Is that a custom command?
Sure lol
i just wanna check this

for this problem
i know T # P = P # P # P
so i should just be able to use that as much as i want right?
no worries if you dont know
I forgot is RP² orientable?
it is not
I had done a similar ex, so the only orientable surfaces are surface with n-genus, and non orientables are RP²#RP²#... so if you attach one RP², you'll get a non orientable one so it's otta be one of the form RP²#...#RP²
something similar to that
I cannot prove the classification theorem but what you can try is draw the n-gon and try to cut paste some sides, see if you get RPⁿ s
my general idea was to start from T # P = P # P # P
we did it in class so i dont have to do that
that's how I did that so you'll eventually get it as well
but then here
if you sum another P it's obviously just more projective planes
i use P it's easier lol
but adding another T you can just rearrange bc it's commutative
imma just go with that
,ti
The current time for stμ₂dying is 03:27 AM (EST) on Tue, 31/01/2023.



isnt 8.9 the torus for even and odd n????
could someone verify if my proof is correct?

other two definitions used:

note that we have not yet defined open and closed sets
Is $\mathbb{Z}$ with the p-adic metric compact ?
Julien J

haven't defined compactness yet either
(which also means I don't know what that is)
having had a quick look at the wikipedia article and assuming 'p-adic metric' means this:
I'd say no, $\mathbb{Z}$ is not compact with respect to the p-adic metric
thou_art_an_egg

in a metric space, convergent sequences are sufficient to describe continuity: if every sequence x_n converging to x is such that f(x_n) converges to f(x), then f is continuous at x.
Is there a (relatively simple) counterexample for this in a non-metric space ?
this holds true in, more generally, any first countable space, so you want to look for counterexamples in spaces which aren't that
do you know of an example?
In X = [0, w_1] any sequence convergent to w_1 must be eventually constant. So if you take f from X to itself with f = id on [0, w_1) and f(w_1) = 0 then for any sequence x_n in X convergent to x, f(x_n) converges to f(x). But f is not continuous
what is the topology on X?
Order topology
w_1 is the first uncountable ordinal
my bad
does a simpler example exist?
something not involving ordinals
I'm guessing not, in which case our professor will not ask us this type of question on our exam
nope, but i knew where to look so i hoped that would help
not sure you can hope for much simpler examples since you are looking for topologies that aren't first countable
in the last paragraph, why does U x V \subset (X x X) \ diagonal imply that U and V are disjoint?

Is a lifted closed loop still a closed loop?
are you talking about like, in the fundamental group
and covering spaces
if so, the answer is no
yes
yeah so consider the covering space map R -> S^1
thank you
suppose its not
what happens
as in suppose U and V are not disjoint
so there exists an element both in U and V
what would happen inside U x V
ah that makes sense now
if they shared a common element x, then (x,x) would be in U x V, but then U x V isnt a subset of (X x X) \ diagonal
cool\
why would every sequence in A converge to a point in A?
Wait no mistake ignore
literally a question in my topology exam today
I need to prove that if for each pair of points of X, each has a neighborhood not containing the other, then X is $T_1$.\
Suppose the hypothesis and that $x \in X$. Then by hypothesis, for all $y \in X \setminus {x}$, there is an open set $U_y$ such that $y \in U_y \subseteq X \setminus {x}$. So $\bigcup_{y \in X \setminus {x}} U_y \subseteq X \setminus {x}$. I want to also show that $X \setminus {x}$ is a subset of the union, so then we have that $X \setminus {x}$ equals the union of open sets, completing the proof, but i'm not sure how to do this
michαel

I think this goes by construction. Notice that you're taking a union of open sets containing a point of $X\setminus{x}$ for each point in this set. So this set is contained in the union.
SubGui


that makes sense
(more interestingly but I might be wrong here is that if this open cover had a finite subcover, then X\ {x} would be compact, but {x} is closed because it is its own cover in any topology, so either X is finite or the topology on X is the discrete topology)

like I am saying this but I didn't even had lectures on compactness
we're covering compactness in a few weeks
if i remember i'll come back to this then lol
Does anyone know a short proof for this:
yes
If C \subset complex is compact and contracible then it’s complement is connected
One point compactify C then from Alexandar duality
$\tilde{H}_0(S^2 \setminus K) \cong \tilde{H}^{2-0-1}(K)=\tilde{H}^1(K)=0$ since K is contractible


I'm trying to prove that in the set (0, 1), the sequence p_i = 1/i for i > 0 is Cauchy
and to do this, I need to show that for any eps > 0, there exists an N > 0 such that for all i, j > N, d(p_i, p_j) < eps
I chose N = ceil(2/eps), but I'm having struggle with proving that this works without referring to 0, which isn't in the set
If I was able to refer to it, I could just say:
for all i, j > ceil(2/eps), we have that d(p_i, p_j) < d(p_i, 0) + d(0, p_j) < eps/2 + eps/2 = eps
but we can't, so this seems to be an issue
so if we were working in R and not (0, 1), the above would be a valid proof. thus, can't I say that because it is cauchy in R, it must be cauchy in (0, 1) as well?
you can refer to 0 lol
specifically, you are using the induced standard metric from R
so whatever you can deduce from R about distances will hold in the induced metric for (0,1)
but doesn't the induced metric "forget" everything not in (0, 1) ? specifically, the metric is just a partial function of the original metric
or are you saying something like this
- working in R, we know that
p_i = 1/iis Cauchy - thus it must also be Cauchy in
(0, 1)(removingp_1of course)
the induced metric forgets, you don't
call p the metric on (0,1) induced by the standard metric d on R
you know that d(p_i,p_j) < epsilon
by definition, d(p_i,p_j) = p(p_i,p_j)
there is really nothing mystical here, you are working with 2 different functions
unless someone banned you from using d
wait lol
u probably didn't wanna choose p as the other metric
wdym by d_i and d_j
oh mb
fixed
didn't mean to quote that either
makes sense, thanks
you can say this but it all comes down to the reasoning above, a sequence being cauchy in a subset depends on the distances between points on that subset
and if you are using the induced metric, these by definition agree
I see
are there any nontrivial complete metric spaces where it's easy to prove completeness without using high powered theorems
ok not even "high powered theorems", I just mean something not as hard as the proof for R
What does the identity element of C_n(X) (the free abelian group with basis the singular n-simplices on X) look like?
Will it just be the zero map?
no
the identity of C_n(X) does not come from a map from Δⁿ → X, it's a "formal" element

am I crazy or does this not just work?
all the proofs I saw on MSE were like three times as long
To me this seems fine lol
Yeah seems fine
yeah, like the inclusion map takes an element of the open set and send it to the same element in the top. space. So if you take the pre-images of these open sets, you will always find an open set containing the point in the subspace top. means the intersection with the open set on X with Y 
I think so
Am I missing something here. So every CW complex is paracompact, and there's an obvious CW structure of $\vee_n S^1_n$. But finding an open refinement of the open cover ${ S^1_n \setminus , N() }$ doesn't seem plausible.

(what does N mean here - a small nhd of the wedge point or smth?)
But yes I think you could refine it just by taking some smaller bit of each S^1
So like uhhh I can draw a picture lol to show what I mean

idk if this is clear enough lol
But like you just take out a bigger section of the S^1 \ *
This is clearly an open refinement and there's a neighbourhood of the wedge point which only intersects one open set, i.e. N(*) in ur notation
This should go through without any problems to the general (i.e. n > 2) case
@coarse night
What’s the nbd of *
also isn't any nbd of * is of the form U1 v U2 v ... where Ui is a nbd of * in S¹_i
so O don't see why that intersects only finitely many of those
@unreal stratus
yes
Yeah sure
So that's why I made the other sets smaller
but that's wedge of countable nbds of * in S¹
I haven't changed the neighbourhood of *
I just changed the other sets
I can write it more formally if you'd like
that still intersects nbd of * no?
if you make them too small then it'll stop becoming a cover
Yes, the point is that there is some fuzziness as I showed in my picture ^
sorry if that was unclear lol
so won't be a refinement
I'll make it better lol
Okay so I mean really all we need to do is do the n=1 case in a sense like
ok just draw for one circle maybe
If we look at the intersection with each circle, then uh
let's say for ease that N(*) is some open arc of angle φ, say
Then we can replace S1 \ * with S1 \ {closed arc of angle φ/2 about the point}
oh lmao I've been working with a wrong definition of locally finiteness
Oh lol
Yeah the point is that the point ahs some neighbourhood
not some neighbourhood in the cover
Been thinking thay N(*) has to intersect finitely many
No worries, literally just means you were a bit unsure w a def that's calm
And gave me good practice cause I have never rly considered examples lol

When Munkres say we only need to show it for the interval $[0, 1]$, why is that true? How does the general case follow?

Cookieman

Is it because the proof presented works for the interval [a, b] instead of [0, 1]?
because you have nice homeomorphism between [a, b] and [0,1]
huh
find f for [0, 1] and then compose this with the map g : [0, 1] --> [a, b] given by g(t) = a+(b-a)t
so in the end you get X --> [0, 1] --> [a, b]
you can then check that this composite sends A and B respectively to {a} and {b}

not uwu? 
right sorry, I'm just thinking about how to adapt this into my proof.. This makes sense. Thank you!
Also just a sanity check, the proof presented for the interval [0, 1] does work for all $a, b \in \mathbb{R}$, right?
Cookieman

I don't see how the proof utilized anything special about 0 and 1, except from they make the proof looks cleaner
Yeah
This is all
ig there is a subtlety
endpoints of [0,1] are rational, but for [a, b] this need not be the case
i don't remember exactly how the proof went, but ofc this could be fixed
Ah interesting..
but yea afair you only needed a countable dense subset which included the end points, so doesn't matter that much, ig having the endpoints isn't really a requirement, but the "same" proof won't work
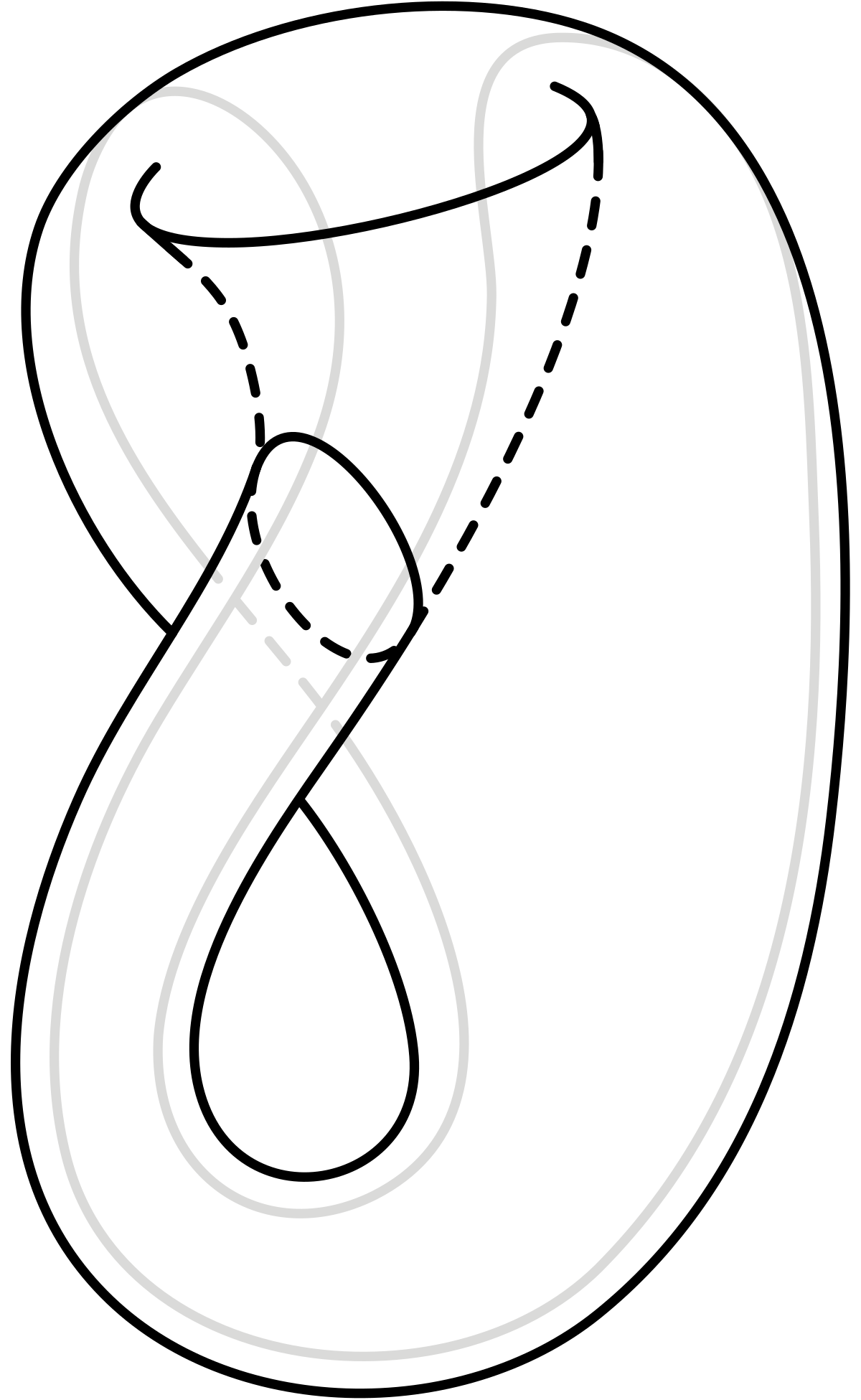
Im starting a topology class and we are currently talking about the fixed point property.
We proved that the fixed point property was a topological property and that seemed pretty straightforward, the book then follows this up by asking if a torus has this property, and Im struggling to intuitively understand what this means.
A continuous function f: from the surface of the torus -> the surface of the torus must have a point where x = f(x) right? Im not sure where to even begin for proving this. Are we supposed to unglue the object into a 2d plane and try to answer the question there?
What examples of surfaces with/without the fixed point property have you covered?
In class we talked about [0,1] vs (0,1)
Where [0,1] had the property but (0,1) did not because of f(x) = x^2
Hmm, okay, do you recall the definition of a torus
I dont think the book covers it, but we did it in class it was something like a 2d plane with X/a gluing it into a cylinder, and then X/b gluing the cylinder into a torus. But idk if thats the actual definition or just a thing we did on the board for intuition or somethsing
Is there anything you know homeomorphic to the torus?
they're asking if every continuous function has a fixed point
but rotate a torus 180 degrees and you see this map has no fixed points
coffee mug? 😅
Im not sure what you mean by this
what blitz said is a good hint
Fixed property needs to hold for any continuous function
But if I imagine the donut from a birds eye view and imagine the continuous map that rotates this 180 degrees clockwise
S^1 x S^1
So i thought that the maps in question had to be movements across the surface. like a path or something. So im not sure how to translate that to rotating the object

Oh I see
I think i actually get what ur saying
The map is basically reflecting the x to its adjacent point on the other side of the torus right?
That's exactly in the 180 degree case
But note even "rotating" by 1 degree is enough
right
that makes sense
Okay is that valid as a proof? Like can topologist just say "imagine the rotating torus. QED" lol
Idk depends on your prof tbh
For a more rigorous version
I was trying to hint that the torus is homeomorphic to S^1 x S^1
Now since fixed point property is preserved under homeomorphisms the questiosn becomes
Does S^1 x S^1 have the fixed point property?
You can write a formula for the function
for S1 x S1 im imagining infinite circles place around in a circle and eventually forming a solid torus, and inline with the rotating torus, you could assign f(x) to be the same point x in the next circle. but idk how to rigorously work with this stuff
I find it just as hard to answer this question, as the torus question lol
okay wait
I over complicated this
S1 does not have the fix point property because you can define a function f to the points on the opposite side of the circle and finding one mapping is enough (thats the part i was forgetting)
Yeah
Having fixed point property is quite "strong" in the sense it must hold for every continuous function
Right I have no idea what I was trying to solve for in my head, but finding one mapping is not that hard i dont think in this case. It just requires encoding the rotation into a function.
I think for the circle f(x,y) = (-x,-y) should be reflection along the center.
and similiarly for the torus i think f(x,y,z) = (-x,-y,-z) should work.
I think ™️

I am trying to show that the equivalence will collapse the disjoint union down to \Delta^n
what do you have so far
the basic idea is that for any degenerate simplex in the disjoint union, there's a map from that simplex to some lower dimensional simplex and you're going to glue along that map
so the degenerate simplex is going to disappear in the sense that it just gets identified with its image in the lower dimensional simplex
and so at the end of the day, only the nondegenerate simplices really appear in the complex
...is there another definition of the torus besides as S^1 X S^1 endowed with product topology?
why even use Cartesian coordinates? more natural to use the two circle angle cords.
\forall a != 0,
f(\theta, \phi) = (\theta+a, \phi) where we take angles mod 2\pi can't have a fixed point because that would imply \theta = \theta + a but a != 0.
identifying points of the square [0, 1]^2
ahhh
eww
I'm sure algebraic geometry can't be this bad
group actions?
(x^2+y^2+z^2+1/2)^2-4(x^2+y^2)=0 for example
this is a proof for why cl(A) x cl(B) ⊂ cl(A x B), where A, B are subsets of a topological space X and the product topology is considered.

why is it that because A is closed, U and A are not disjoint?
"by the definition of closure points, U intersects A at some a'."
i don't know where you're reading what you wrote about A being closed
what is the definition of the closure of A
these are the defns of a closed set I know:
- contains all its limit points
- complement is open
and the defn of closure I am using is a set along with its limit points
what is a limit point
a point p is a limit point of a set A if all neighborhoods of p intersect A infinitely number of times
or just once I think
so a is in the closure of A and U is a neighborhood of a
so a is either in A or is a limit point of A
do you see how the definition of a limit point gives you a point in the intersection of U and A?
I see that now, but what if a is not a limit point
think about what you are trying to prove
if a is not a limit point, then it's in A, and it's in U, so...
(so we can take a' to just be a)
lemme try to reproduce the proof from the beginning
given a point (a, b) \in cl(A) x cl(B), in order to prove that (a, b) \in cl(A x B), I need to show that every neighborhood of (a, b) intersects A x B at least time (other than (a, b)). so I need to find a point (a', b') in this intersection
let W be a neighborhood of (a, b). then there exists open U, V such that (a, b) \in U x V ⊂ W (standard basis).
assuming a and b are limit points:
because cl(A) is closed, we know that the neighborhood U of a must intersect cl(A) at some other point a'. similarly we can define b'. then (a', b') \in ((U \cap cl(A)) x (V \cap cl(B))) ⊂ U x V, so this point indeed works
if either are not limit points, then
wait I understand the defn of a closed set, but how can I check that a point p is a member of a closed set?
because
given a point (a, b) \in cl(A) x cl(B), in order to prove that (a, b) \in cl(A x B), I need to show that every neighborhood of (a, b) intersects A x B at least time (other than (a, b)). so I need to find a point (a', b') in this intersection
isn't really true right? I basically just said that in order for a point to be in a closed set, it has to be a limit point of that set, which is wrong
I realized the problem is I don't understand the concept of a closure well
Let X be a set, and let X' be the set of limit points of X
I want to show that cl(X) = X \cup X' is a closed set, i.e., it contains all of its limit points. To do this, I can show that all limit points of cl(X) are also limit points of X, so by the defn of cl(X) this will suffice.
Suppose p is a limit point of cl(X). This means that every neighborhood U of p contains a point x \in cl(X) other than itself. I will show that p is also a limit point of X, and to do this, I will show that in every neighborhood of p, there is a point other than itself contained in X.
Let U be a neighborhood of p. If the other point x \in cl(X) contained in U is in X, then we found our point.
Otherwise, if x \in X', then by the definition of X', x is a limit point of X. Moreover, x \in U means there is another neighborhood V of x such that V ⊂ U. But since x is a limit point of X, this neighborhood must contain a point in X. Thus we have found our point.
Lol the explanation of this everywhere is 2 lines but I only understand it if I write out everything
ok now I can tackle the original problem
given a point (a, b) \in cl(A) x cl(B), in order to prove that (a, b) \in cl(A x B), I need to show that either (a, b) \in A x B or every neighborhood of (a, b) intersects A x B at least once (other than (a, b)). so I need to find a point (a', b') in this intersection
now on with the proof. let (a, b) \in cl(A) x cl(B). if (a, b) \in A x B we are done. otherwise, for every neighborhood of (a, b), we need to find a point (a', b') also in this neighborhood that is in A x B
let W be a neighborhood of (a, b). then there exists open U, V such that (a, b) \in U x V ⊂ W (standard basis).
assuming a and b are limit points (because (a, b) is not in A x B, but still have to check when one is a limit point and the other isn't*****):
because cl(A) is closed, we know that the neighborhood U of a must intersect cl(A) at some other point a'. similarly we can define b'. then (a', b') \in ((U \cap cl(A)) x (V \cap cl(B))) ⊂ U x V, so this point indeed works
*****if one is a limit point and the other isn't, WLOG a is a limit point and b isn't. then (a', b) is our other point.
finally!
now I finally understand why this works 👍
does every infinite sequence (of distinct points) in the zarski topology converge to every point
yeah seems so
@odd flame were you able to resolve your problem?
i'll find out tomorrow when i get my hw back 
lol anyway I can refer you to some material where the algorithm is given
I was actually reading it so thought might refer you as well

John M Lee Introduction to topological manifolds, look at chapters on classification of compact surfaces
do you have pdf or link?

thank <3
Suppose X and Y are topological spaces and f: X -> Y. "for every closed subset V of Y, the preimage f^{-1}(V) is closed in X" implies that f is continuous
Pf:
Suppose U \subset Y is open. Then Y\U is closed in Y. So f^{-1}(Y\U) is closed in X by hypothesis. Therefore X\f^{-1}(U) = f^{-1}(Y\U) is closed in X. Therefore f^{-1}(U) is open in X
How do we get that X\f^{-1}(U) = f^{-1}(Y\U)?
it's a set theoretical fact that $f^{-1}(A^c)=(f^{-1}(A))^c$

try picking an element and show they are same, basic exercise
hi, is this proof right?

Im trying to get a grasp of a compact set. I have a definition that if for every x_n in S there is a convergent subsequence in S, then S is compact.
Now, would the set such as [2, 3] \union [4, 5] be compact?
I can't find a proof that it is not.
since i know from borel theorem, that compact is bounded and closed, I can think of all the sets that are bounded and closed.
so is the above set closed and bounded in R?
Yes
But, the reverse implication is incorrect AFAIK
bounded and closed => compact
ahh, wait i read it wrong
heine borel theorem says that this is true for subspaces of R^n
but you'll see that soon ig

thanks!
you could prove that the above set is (sequentially) compact directly by definition
That's a good idea as well.
Too much text
alright bet
f^-1(empty) = empty, f^-1(Y) = X so f is continuous. Is what I'd write. Add some flavour to make it look like a proof. Then qed
yeah i suppose thats all you need to write, i think for me though i wrote out like everything i was thinking sense when i first looked at it i didnt realise f^-1(Y) is X
Suppose we have a function, f which is differentiable on (a, b). How do we know that inverse of this function is differentiable?
this seems like a #calculus yes?
In mathematics, specifically differential calculus, the inverse function theorem gives a sufficient condition for a function to be invertible in a neighborhood of a point in its domain: namely, that its derivative is continuous and non-zero at the point. The theorem also gives a formula for the derivative of the inverse function.
In multivariabl...
next time put it in a different channel, if it's related to differentiability then this is probably not the place to post it
believe that's not the question they asked.
it's not always true, take (-1, 1) → (-1, 1) by x ↦x³
i read it as what blitz interpreted it. it seems like theyre wondering what conditions need to be met for the inverse of a function to be differentiable over an interval.
Can we actually expect the Locally Compact Hausdorff Version of Urysohn's Lemma to do this?

In particular, I am wondering if the statement after "Moreover" is possible
It seems like the original proof for the Urysohn's Lemma for LCH spaces wouldn't go through. In particular, if we require continuity, then we won't have compact support and if we require compact support, then continuity fails.
This is the proof I am following: https://www.math.ksu.edu/~nagy/real-an/1-05-top-loc-comp.pdf
Also I hope this is not duplicated question from yesterday. I believe composing by the original homeomorphism suggested by @marble socket, unfortunately, won't help in this case. In particular, everything outside of the support $f$ after composition would be raised by $a$, making $f$ not compactly supported.
Cookieman

it's a typo (or someone didn't think this through for all I know)
they really want f-a to have bounded support
I see what you mean, but then can they get f to be still a on F?
all they are doing is sending [0, 1] to [a, b]
so whenever f would output 0 in the first part of the theorem, they send it to a
Oh I see
Lol okay, so are we asking too much if we also ask for compact support?
so you basically do a+f(x)(b-a) where f is the compactly supported function
Is there a counter example?
yep, it really should be "constant outside of a compact set"
just take anything like a = 1
and X not compact
this is what the author really meant
maybe idk. I didn't get an answer
Mmm yeah I agree. Sorry I had to head to a class earlier and wasn’t able to reply. Thank you!
It's fine! I was just saying you might still be confused 
anyone knows what this notation means (I am referring to the smash with a subscript)? It's never defined and I can't find sources that define what this is

at first I thought it was some orbit space but idk now
Yes schwede uses them for the orbit space of the diagonal action
So here you can think of it as inducing up the action from the subgroup 1xS_n to S_m+n
Quick sanity check: D\subset X discrete => D\cap A\subset A discrete for all A\subset X:
If B\subset D\cap A, then B\subset D and it's open in D, so B=D\cap O for open set of X. Then B=B\cap A=(D\cap A)\cap (A\cap O) is an open subset of D\cap A => D\cap A is discrete in A.
D cap A is discrete as a topological space
being discrete means just that
(though sometimes they impose that it needs to be closed, but that's uncommon)
D cap A is a subspace of D
Oh like that you mean.
subspace of discrete space is discrete
OK sure
If you have two subspaces A,B of X and a subspace C of A\cap B, then the topology of C doesn't depend on whether you consider it as a subspace of A or B, right?
since subspace topology is transitive
in the sense that if $X\subseteq Y\subseteq Z$, $X$ has subspace topology from $Y$, $Y$ has subspace topology from $Z$, then $X$ has subspace topology from $Z$
Blitz

Yeah, I know.
we have that C has, in both cases, subspace topology from X
Thanks.
this transitivity property doesn't always hold for some properties of a topological spaces so I thought I'd write it as a fact
If I want to show V=R^n x C^m (as an R-vector space) is Euclidean (in terms of its topology), is it enough to say
"|(x,z)|=max(|x_i|,|z_j|) defines a norm on V [it does, right?] and since all norms on a findim space are equivalent, V is Euclidean"?
C is homeomorphic to R^2
from properties of product of topological spaces, V is homeomorphic to R^(n+2m)
well if you're going to introduce the concept of finite-dimensional space as a topological space
then you ought to show it's well-defined beforehand
I know, but I want to show it differently.
Does what I say work?
The Euclidean topology is the only topology on R^n that makes it a topological vector space and all findim R-VS have the same topology induced by a basis (change of basis is a homeomorphism).
like, you're trying to prove something but I don't even know what you're proving
Yeah, maybe it's a little ill-posed.
if V is n-dimensional R-vector space, with any topology giving it topological vector space structure, then V is homoemorphic to R^n
NVM, I'll just treat V as R^{n+2m} (which it essentially is).
this follows from V being linearly isomorphic to R^n so that it induces a topological vector space structure on R^n
Yeah.
which then is homeomorphic with standard topology on R^n
such that the linear isomorphism becomes a homeomorphism
so
topology of finite-dimensional space is uniquely defined by the dimension
in the sense that, any two n-dimensional topological vector spaces are homeomorphic
Thanks.
Hello, I just want some reality check. I conjecture that it's true that the circle group $\mathbb{T}$ is isomorphic to quotient space $\mathbb{R}^2/\sim$ where $(a,b)\sim (c,d)$ if and only if $ab-cd\in \mathbb{Z}$. I think this is true by considering the quotient mapping $\rho: \mathbb{R}^2 \to \mathbb{T}$ via $\rho(a,b)=exp(2\pi i ab).$ Are there any obvious reasons why this may fail to be true?
blackiris

Well i guess you've just gotta check whether this is indeed a quotient map, but assuming that is true this holds fine
But yeah I imagine this is an open map anyway
if I have X is the set of two disjoint nonempty closed subspaces, X is connected? because something is not connected if it's the union of two nonempty open disjoint subspaces. like rn I'm visually like two closed balls in R2 and it seems like by the definition it's connected? but it feels weird to call them connected

this is definitely disconnected
it's the union of two non-empty disjoint open subspaces!
do note that in the definition of connectedness it doesn't matter if you use open or closed subspaces
if X is a disconnected topological space, X = U \cup V with U, V open and disjoint, then U is X - V so it's closed as well
same for V
or maybe i should phrase it like: if X is a disjoint union of U and V, then U and V are both open if and only if they're both closed
ohhhh
yeah I was thinking about the topology on R2
there is also that result that X is connected iff its only clopen subsets are the empty set and itself
Is If A is in a topological space then we call A open (in that space)?
you mean as a subspace?
or as an element of the topology?
element
the elements of the topology are called the open sets of the space
you can also define a topology where the elements are closed
but for the subspace case, it may not be true, for example [0, 1] as a subspace of the real line, it is open in the subspace topology but closed in the topological space
yes, as part of the axioms of a topology, A must be an open subset of the space A
note: as a subset of the space A
because in the subspace topology, $A = A\cap X$, where $A\subset X$ is a subspace of the top. space $X$.
SubGui

that's not called a topology
I don't think it has any name
maybe I messed it up, I was thinking of a example where you have a discrete topology on a finite set satisfying T1 axiom
very specific btw

There are some contexts where it's most convenient to define a topology by describing what the closed sets are, rather than what the open sets are. (One example is the Zariski topology in AG). It sounded like that was what you were talking about.
I wouldn't say it's part of axioms of topology. We define topology to satisfy certain axioms and simply call set open if it belongs to the topology
most likely, but I possibly messed it up
thanks nevertheless
its is literally an axiom

also all these nitty gritty special case examples are super useless for someone that is just learning the definition of a topological space
what is
like you cannot seriously imagine that this is in any way helpful
the original question was asking about subsets of topological space
Do you have a definition in mind that does not make it an axiom that the entire space must be an open set?
the question is open up to interpretation
what stronq was asking that is
I don't think they were asking about whole space being open at all
There's nothing up to interpretation here. If you want to claim there is such a defintion in anything resembling common use that doesn't make this an axiom, the onus is on you to provide it.
Is If A is in a topological space then we call A open (in that space)?
is that not open up to interpretation?
I agree with blitz here question wasn’t clear
No, the answer is unablguously yes beacuse the axiom requires that.
Nowhere was it specified that A is the topological space in that question
Or what A even is relative to that space
yeah, that's why I asked if it was as the subspace of the space, but it didn't mention if A was a subset to begin with
If A is a subset of X, A is open in the subspace top on A
But not necessarily open in X
If that was the question
I think the one answering the question should have just confirmed what the question really is
because we're all guessing at this point what it could mean
It's okay, at least you weren't rude about it
Hi, guys, why this is a homotopy? How to see that immediately $F: I\times I\to Y, F(t,s) = h_t\cdot\varphi_tf\cdot \overline{h_t}(s)$ is continuous?

cc0101

are you asking how you’d prove it or more intuitively?
i can see why intuitively this is true
path products (when endpoints are shared) are continuous by the pasting lemma, and these paths all share endpoints for arbitrary values of t
Yes, this is true. My main concern comes from that if F: X\times Y\to Z is map, and F: X\times {y}\to Z is continuous, F: {x}\times Y\to Z is continuous, for all x,y, then we cannot conclude that F: X\times Y\to Z is continuous
so for every t, F(t,s) is continuous does not make F into a homotopy
well you can use the product topology to show this is continuous. i believe, in particular, this amounts to using/proving the tube lemma, but that could be wrong
oh are you saying F(t,s) continuous is not enough?
the rest of the conditions should follow really easily
yeah, i worried about that, F: {t}\times I \to Y is continuous is not enough
h_t is continuous as it is a composition of continuous maps. same reasoning for phi_t of f
i don’t know if there’s anything else left to show? you have continuous maps from continuous compositions, and you’re taking their product which is also continuous (as they share endpoints)
Sorry, i am a little confused, do you mean if we have a map F on X times Y. We want to show it is continuous, we just need to show F is continuous on X by fixing a point in Y, and F is continuous on Y by fixing a point in X?
no
i’m saying that F is a product of paths, where each path is continuous as it is a composition of continuous functions
so F is continuous itself
no no problem
Hi, sorry to bother, but I looked up the definition of homotopy from wiki. I am not sure about the last sentence contradicts to what you said

we’re not claiming h_t is continuous for each individual t, we’re saying h_t is continuous over the whole space X x I since it is a composition of continuous maps.
they’re saying it is not sufficient for h_t to be continuous at each X x { t }
Can someone help please to understand the question 7(b)

what's not clear about it?
Do i need to assume some functions continuous from R to Rl , then show it is continuous from R to R ?
The question doesn't ask you to show anything
It just asks you to ponder on what those functions could be
Oh
Constant functions are continuous from R to Rl
Does it help to conclude something about f : R→R
recall that the open sets in $\bR_{\ell}$ are of the form $[a,,b)$
SubGui

slight nuance: those are the basic open sets
open sets in R_\ell are going to be unions of these
mb, yeah the union of these
I never use this topology ever
like
where does it come up?
notice you're taking a limit as x approaches a from the right, so x is in a set [a, b) for some b > a
now you apply the definition of continuity
topology is all about counterexamples, the sorgenfrey line is home to many of those
so it is important to a topologist
eh intro pointset top is about counterexamples
counterexamples are important but there is more to the field than this
the types of questions i see are usually about classification if anything
okay I apologize for exaggerating, topology is not literally all about counterexamples
intro pointset is sort of about classifying spaces and finding out precisely which hypotheses you need for interesting theorems (e.g. Tietze) to hold, so counterexamples are needed to draw the line so to say
just like in any field of math, huh (comment was edited so what I said might not make sense)
counter-examples gives us crucial insight no matter where we are headed
part of general topology is about classifying spaces
so its important to know what classes of spaces overlap... and which is contained in which etc.
that's the only reason why there's more counter-examples in intro to general topology than other introductions to a math field
that's my take anyway
maybe there is a God of topology and it doesn't want us to find it
A refinement D of a cover A does not necessarily have to be a cover right? If you think about it empty set can always be an refinement, as the definition only requires that for all elements in the refinement there exists an element of A such that the element in the refinement is a subset of that element of A. Since, for all statement of an empty set is always true the empty set is always a refinement, which is of course not a cover for any set except for the empty set
it does have to be a cover
Is that part of the definition?
if it doesn't follow from your definition, then take it as an additional assumption
it should be in the definition of refinement you're using, though
Yeah, I think the definition of refinement of a cover also says "still covers"
I see. I am also looking for a way to interpret paracompactness, namely an intuition for what it means for there to exist a locally finite open refinement for every open cover. The notion of open refinement is pretty easy to understand as it is just about having the possibility of a cover with less/smaller sets than the one you started with. Locally finite may be interpreted as you do not want a neighbourhood of a point in the space to collide with infinite many elements in your cover. However, I still do not have a clear idea of why we would need this notion of paracompactness based on its definition. Does anyone have an intuitive way thinking about this concept?
you know how hausdorff is a way to talk about seperating two points?
maybe it'll be insightful to think in what way is paracompactness used
we usually have a local property, and using paracompactness we can "glue it" obtaining a property which is global
Yeah, that you have two disjoint neighbourhoods for any two points
(also if it didn't need to be a cover, it'd be a bit of a pointless definition)
Was about to say smth but Blitz beat me too it :)
Well, perhaps to add to it, importantly a space X is paracompact hasudorff iff all open covers admit subordinate partitions of unity, which allows one to often do what Blitz says in the last message ^
you can interpret it as a bound on the open sets of the cover that makes things more localized
i can try and think of an example to illustrate this
as for definition of paracompactness itself, I don't see much intuition for it, really, a locally finite open cover obtained from using paracompactness, will probably be pretty wild in general
Yeah to me it just feels like "here are some arguments we want to make - what is the weakest hypothesis possible that allows us to do them"
Which is fair but yeah feels inch resting
yeah, you want it rephrased asap
if to gain an intuition for it, is what it feels like
Yeah
A concrete example would be helpful for me to grasp it.
I mean, compactness even, to see why its defined that way you really want to go and look into the history
I'm trying to see what it meant with local property, what would be an example of that?
I suspect to gain intuition for the concept of paracompactness, other than it just being similar to compactness, you need to look at how it was obtained in the first place
manifolds are a good example
well, by locally we really mean using partitions of unity in a clever way to derive global properties from local ones
for example, using property such as local metrizability
local properties usually come in two flavours
things like local compactness, and things like how usually the term is used
here we mean that there is a neighbourhood which is metrizable
I see, I'll try to understand why that turns that into metrizability with paracompactness
Hausdorff paracompact locally metrizable spaces are metrizable
because Hausdorff paracompact makes the local metrizability into a global property
i.e. metrizability
coincidentally I asked a friend if they studied paracompactness in his courses and he couldn't tell me what was it useful for
thanks about these
its okay
How do you extend local properties for just general hausdorff paracompact spaces? I know for manifolds you can use partitions of unity but how does it go in general?
.

graders said that this wasn't enough?
but isn't showing "U x V must be open for open U \in X, V \in Y, when the two projection maps are continuous" equivalent to the the product topology being the coarsest?
I think your logic is sound here but you did not make that explicit.
"Let U \subset X be open. Since alpha is continuous, alpha^{-1}(U) = U x Y is also open" In what topology?
In the product topology or in another topology?
You probably would have gotten full credit if you added a sentence at the beginning where you said "Let tau be an arbitrary topology on X x Y such that the projection maps alpha, beta are continuous. Let U be open in tau" Otherwise it seems like you might just be talking about the product topology, which is the only topology mentioned explicitly in the question
In X's topology. X is given as a topological space so isn't it fairly implicit?
how could a subset of X be open in the product topology anyways
that's a categorical error
(I posted this like a week ago) this was the previous part to that question, and I got full credit for it

I guess it's because I included the "That is..." part similar to what you said, but I thought I could just leave it out of the next part rip
Sorry i meant U x Y
and X x V
not U and V
the topology of X and Y is unambiguous.
What's ambiguous is the topology of X x Y.
I edited my original post to clarify.
are these the T_0 T_1 kind of things?

i searched it up and the separation axioms seem kind of different from these
it later proves the equivalence of (i) and (ii)
and defines any top space satisfying these to be separable
is there any relationship between separable spaces and the separation axioms?
i'd imagine there is, but not sure how
These are odd terminologies. A space is called separable if it has countable dense subset and called 2nd countable if it has a countable open basis. In general 2nd countability implies separability and converse is true for metric spaces.
Bruh