#microcontrollers
1 messages · Page 24 of 1
C is good for microcontrollers
Oh okay
C is good for fast io stuff on microcontrollers, but python is good for data processing/visualization
not exactly a python related question, but is renesas edge computing system fast compared to other embedded systems?
With the Pico you can go circuit-python and the tutorials on adafruit are excellent
when u start id even recommend buying smth like an esp32 or 8266, they can be coded pretty much the same as an arduino but add wifi and or bluetooth capabilities
Yeah the structure I'd use is having one host a site with a page that accepts a POST input, the having the other 10 post packets to the first.
definitely the pycom board, theres no code on windows yet, i was attempting to use a BLE tool called "Bluetooth LE Lab"
https://www.adafruit.com/product/3333 This is a good starter microcontroller board with lots of peripherals and it can run circuit python if that's what you're after

Circuit Playground Express is the next step towards a perfect introduction to electronics and programming. We've taken the original Circuit Playground Classic and made it even better! ...
a raspi is like, twice the price though
the pico
oh hu
It does come with a lot built in, whereas the pico is more or less just the micro and pins. I've you've got a ton of other stuff laying around, like LEDs, buzzers, ir transmitters receivers, etc, then the pico is a good choice. But the circuit playground has a ton built in so you don't have to worry about wiring things together when you're first learning about micros
Ok, that should give me something to look for. Adafruit has been looking to add BLE based programming support to some of their boards, but I think they're building their own stack for it (I could be wrong) so I don't know how much cross over there is between circuit python's BLE stack and micro python's BLE stack
thank you, im just surprised anyone here has even a hint of a idea. judging by the forum threads, most of which are full with people asking for help and devoid of any answers, thats rare.
Yeah I've been trying to pair my wii balance board with a raspberry pi to act as a smart scale at home, and actually bonding to the pi has been my pain point with it.
wait, what can i really do with a micro-controller?
You might actually have good luck on the adafruit channel since the core devs are really focused on the ble workflow right now too
idk, pycom is not really adafruit is it?
A lot, blinking an LED sounds simple but I will never grow tired of that one. I've got a micro collecting air quality data and saving it to my home server, another one is going to track my sleep to help see if I'm getting enough sleep, and to adjust my alarm clocks time it goes off, you can make robots or fun LED animations, etc
something as plain as the pico? do anything with what you can hook up to it and get signals from or send signals to. its pretty dependant on the stuff you hook up to it because it has nothing built in. theres other boards with IoT networking etc built in, which open ups more possibilities (thats what im chatting with Keith about, a board that has bluetooth support)
Can i like code robots?
yep, but you'll need a motor driver
most microcontrollers dont have enough power for driving motors
what is a motor driver?
its a board which powers the motors based on what the microcontroller tells it to do
You're right, and that might mean they can't really help you since they can't offer support, but since they're working with bluetooth right now they might be able to point you in a useful direction. I'll be googling a solution for you as well and if I get any success with it I'll let you know. I'm just guessing that you're probably facing bonding issue with these devices because that's the issue I've been facing with my bluetooth project
oh, thats cool!
yeah, it doesn't really help that im not really sure how BLE works on a higher level, so maybe you're right and i should ask there
Yeah, there's a bunch of different protocals, and different data pipes you need to initiate if you're doing one and not the other, etc. I think in two years the workflow will be a lot better, but until then it's a pain digging through ambiguous blogs from 2008, trying their c code, and then wondering exactly what part of the toolchain is broken in your build that wasn't in theirs
trying C code is especially a pain if you dont have any way to actually run C code 
Hunting for the c equivalent in python then lol. I've just hated bluetooth stuff lately. I'm getting a better handle on it, but I still haven't gotten the equivalent of a "blinking LED" moment yet
the annoying thing is that its not even the main thing i should work on. NB-IoT/CAT-M1 would be more important but im missing the SIM for that, and LoRA would also be interesting but im missing the antenna for that.
For the LORA, if you've got the fitting, a lot of folks have had great success with homemade antenna: https://hackaday.com/2018/03/31/build-your-own-antenna-for-outdoor-monitoring-with-lora/
i dont, thats the main issue. some sort of antenna could be found but its that small connector on the board which i font have anything to using
could you send me a link to that?
I think help with circuit python might be the best choice? I'll hop in and say I directed you there as well, I'm going through the micropython ble stuff on github that I linked earlier right now
i was gonna ask in help-with-radio since its bluetooth related and im using micropython not circuitpython
That makes sense--I'll hop in there then
i just bought a raspberry pi, and like do i NEED a motor driver to make robotics?
The pico or a rasbperry pi 3 or something?
If you're going to drive motors, you should get a motor driver. Most devices don't have much protection on the gpio pins and motors spike the current and can fry the board. The driver board does two things: It lets you add more power to the motors themselves than you can get from a micro, and it protects the micro from the motors
so regardless of pico or a pi embedded linux device, you'll want a driver
the pico
Someone told me that shutting off and turning on your computer does more damage because of the fact that millions of electrons rush in and out of the components everytime you power up or shut down, and that they race and bump into each other, heating up all the parts. He recommended me to keep my devices on 24/7. Should I be leaving my stuff on for as long as possible? Not counting electricity costs but for the sake of maximizing the lifespan of my components.
correct - i would say it a different way , there is a spike of inrush currents on start up - this affects components - some old BBS systems are on 24/7 , 365 , because of this ... this is the way
I wouldn't worry about it. Some parts will get old, get hot, and fail when you power them on, and would have lasted a touch longer if you kept it running. But if you kept it running you could easily have worn them down faster. It's kind of a wash, there's enough power regulation on more expensive stuff that while there's an inrush on powerup, it's not usually fatal to the system.
yall i bought a circuit playground express, its totally worth it
and you can program it using micropython
millions of electrons run in and out of the components
did they ever take basic physics
if that's happening you have bigger things to worry about
such as the ridiculous amount of current through those circuits, the amount of heat they put out, and the resulting explosion
(by millions I presume they mean millions of times more)
"Thinks about what's happening when you turn a electric device the moment the circuit closes its releases millions of electrons racing and bumping and heating up all the parts" sic
Sorry that was just my wrong rephrasing
the electrons stay in there right
I mean I feel like there's gonna be a lot of problems
the electrons do move, but very slowly
yes - I took physics in high school
about a metre per hour
but if you stop the potential difference they stay in there?
so all of those charges leaving the component would be very bad
guess it depends on how fast we're talking
its like a pipe filled with water, if you pump in more some will have to come out somewhere, the only differece is that this pipe doesn't really drain.
individual electrons are quite slow
this happens only for inductive loads, typically: large motors, fluorescent lamps, and electronic circuits with inductors. Any good design will include a suitably-sized capacitor to absorb the spike before it can affect sensitive components.
https://www.ti.com/lit/an/slva670a/slva670a.pdf?ts=1628770120746&ref_url=https%253A%252F%252Fwww.google.com%252F
This is a good application report on inrush current.
Most power circuits follow these principles for nicer electronics
uhm... interesting. I'm afraid my experience in electronics is a bit more... rustic

Ah but that's such a great bit of rustic electronics
I just got my Raspberry pi pico and I have no idea how to use it
This should help you out: https://www.raspberrypi.org/documentation/rp2040/getting-started/
its not making a storage device called RPI-RP2
What are you trying to do with it?
Im trying to connect it to my pc so i can code it
Ok, what do you want to use with it, circuit python, micro python, or something else?
Micro python
Ok cool. I don't think micro python shows up as a board once you get the bootloader on it
so that should be what you want if you followed the install instructions
Hi, i need help. i am trying to use the bmp280 pressure sensor with an esp8266 flashed wth micropython. I have made a code and added a library that i found online. When i try to upload the code i get this error messages: Traceback (most recent call last):
File "<stdin>", line 6, in <module>
File "/lib/bmp280.py", line 52, in init
OSError: [Errno 110] ETIMEDOUT Down here i will put the codes. Please help me!
this is my code:
Hey @glacial turtle!
It looks like you tried to attach a Python file - please use a code-pasting service such as https://paste.pythondiscord.com
from machine import I2C
from bmp280 import BMP280
import utime
import sys
bus = machine.I2C(sda=machine.Pin(4),scl=machine.Pin(5))
bmp = BMP280(bus)
file = open("datalog.txt", "w")
pin = machine.Pin(16)
start = utime.time()
def millis() -> int:
return int((utime.time() - start) * 1000)
while True:
print(bmp.temperature)
print(bmp.pressure)
print(millis())
file.write(bmp.temperature," ")
file.write(bmp.pressure, " ")
file.write(millis())
utime.sleep(0.2)
if pin.value() == 1:
file.close()
sys.exit()
and this is the library:
Hey @glacial turtle!
Uh-oh! It looks like your message got zapped by our spam filter. We currently don't allow .txt attachments, so here are some tips to help you travel safely:
• If you attempted to send a message longer than 2000 characters, try shortening your message to fit within the character limit or use a pasting service (see below)
• If you tried to show someone your code, you can use codeblocks
(run !code-blocks in #bot-commands for more information) or use a pasting service like:
Go ahead and post the code to the pastebin the discord bot suggested and I'll take a look at it
Not sure if this is the right spot to put this, but has anyone used Python to interface with a Raycus fiber laser?
I never have, and that sounds like a specialized tool so there might not be many users here who have. But what kind of interfacing were you planning on using, and to do what?
bruh my raspberry pi pico just cant turn on
What are you doing with the pico, have you held down the button to get the bootloader flashed onto it?
Does anyone know how to use an bmp280 with a micropython compatible board?
Give me a minute, I think that's the one I'm running, though I'm using circuit python
Cool, that is the one I use
I use the circuit python library for it, but I think the code should transfer
This is the code that handles the sensor: https://github.com/adafruit/Adafruit_CircuitPython_BME280/blob/main/adafruit_bme280/basic.py
And this is the root of the repo: https://github.com/adafruit/Adafruit_CircuitPython_BME280
Looks like this repo also uses the adafruit repo and ports it to micropython--that said the work to make it port is pretty minimal: https://github.com/robert-hh/BME280
This all assumes you're using i2c to interface with it I suppose
i dont think a pico pi has wifi , right?
that would raise cost
im on my first coffee , looking to solve a freezer problem
-- i want to monitor a freezer , i want amessage sent via wifi to router ip there is a EVENT - that being power went off , temp dropped below set value , water on floor ... any other ideas????
-- is that the correct sensor from few days ago??
Yeah that's the sensor.
You might just want to go straight to an esp device, the esp32-s2 has native usb support allowing it to easily run circuit python, some of the other esp's can run micro python
I just found this Channel, all mircocontrollers i know are programmed in C, are there some that take python?
These can use circuit python: https://circuitpython.org/downloads
And these are some of what can use micropython: https://micropython.org/download/
I think that might be the one that has space issues. I mean it's a micro so it's expected, but I've got a few of these https://www.adafruit.com/product/4775 and love that I can just mess around and not worry about space issues
STM32 is a great chip though
i am currently working on a Snaredrum that flashes when hit for a Friend of mine and i was planing to use a Adriuno nano, but from the looks of it i will try the Chip you send me.
are you trying to record the percusssion curve of impact?
or just blink LED and call it a day
i want it to be reactive to the force of the impact
will the curve data go to a drum systhethis thing
no that is not needed at the moment, but i want to have the option
drum sensor( voltage out ) ---> ADC---> computer
pretty much and midi would be just convert it to a value between 0 and 255
would be needed for the LED anyways
mmmm i dont know MIDI protocol - but im curious how to convert
hmmm how many drum pads
Midi is just a value for the note for example C1 for the deepest C and a velocity between 0 and 255
so it is just wich note and how loud
did you ever look for a PDF explaining the data protocol
Have been a event technician for 5 Years my knowlege about midi stems from there, i have not read about it for a while now so i cant tell you too much about it
and i have not worked in that field for a few years now
you are really inquisitive, have you build something like that before?

I hate your workspace - that is way to chaotic, and excuse my asking but what does the monster do
Is this Ben Eaters pc course?: https://www.youtube.com/watch?v=HyznrdDSSGM&list=PLowKtXNTBypGqImE405J2565dvjafglHU
its a propeller 1 chip ( parallax.com ) , 8 cores , 32 GPIO , 2 custom counters per core -- i have it configured as a 8 bit data bus , 15 address lines , 3 bit chip address
my design - not others inferior designs
very nice!
white Noice -nice
oh my mac is just an idiot it has real sound
128KB x 8 bit SRAM , RTC , 6x( 8 bit parallel ports ) , ADC( 8bit ) -- im using old junk chips from here and there -- Bens stuff is likely the latest greatest chips
the only really modern chip , is the propeller 1
The board I linked is overkill, but it'll give you tons of room to play around with cool features. I like it as a, "This will feature creep" board
It is cheap enough to just use it for that and test what it could do
a nano would be a better fit but who cares
well - started with read switches - LED on off - then a driver to talk to a PIO - port chip ( read switch - LED display _ - then SRAM was the big deal
well i see the P1 chip as a swiss army knife -- i can create precision clocks , precise pulse widths
lotssss
Once your build is done you can also swap out to a smaller chip and smaller form factor, but not having to worry about, "What if we add this" is awesome. Plus the esp32-s2 is growing on me and I'm starting to see uses for it everywhere
well i wanted to make remote sensors - and a ESP32 has WIFI , some GPIO , but C bores me -- hoping Python3 or even uPython can be on it
depending on the result we will outfit the whole kit with leds with the esp32-s2 we could control the complete set from one chip
well - so many uC ( microcontrollers ) are out there and CPU( RasPi ) , so is good to be flexible
Python 3 ( PY3 ) , is super flexible , cross platform , and i can make GUIs with it
within PY3 is Tkinter , and to make a GUI is cooool , so i make virtual control panels
When i need to make a gui i use pysimpleguiqt - Tkinter does not play nice with me mac
or i am an Idiot and cant use it
maybe i can make a few basic GUIs - then see if code is really cross platform
i use W10 and Ubuntu - so i try to have code play nice in both ENV ( environments )
The last thing i did worked fine on the windows laptop of my Gf but on my mac it had some issues
can you explain........
hmmm - i kinda know -- its a ... wont see variable untol clicked
no biggy
well from W10 its COM ports are seen as , ttyusb01 ( fuzzy memory ) on Linux
i have no problems with the lib i am using now so i have no incentive to switch
okay, i have no idea what that means
QT gui looks better - but .... i dont care im a wire poker , chip stroker , so Tkinter works
well in PY3 , a serial port is seen as COM , in Linux is seen as ttyusb01 , bla bla
the assumption is MAC sees it as ???
i have no idea, coding is just a hobby for me so my knowlege goes not that deep
i want to build my own Firmware flasher for esp8266 but i don't know from where i should start
if anybody can guide me or share a link of any tutorial for building this, that would be awesome
hey guys has anybody tried connecting python programming to arduino through a library called pyfirmata? and has any body tried using the same python code in a raspberry pi to arduino connection?
What parts do you have selected thus far? Are you using an uno to flash it or an ftdi cable, (https://www.monocilindro.com/2017/02/25/flashing-esp8266-using-ftdi-and-arduino-ide/) or are you using something else.
What kind of fimrware are you trying to flash to it, do you have it selected or are you writing your own?
I've never used it, but I am confused by what you mean with the same code on a raspberry pi--I don't think it perfectly works on both. That said you can use pyserial to communicate between the two devices
uh what i ment it
raspberry pi is basically a computer so when we connect python to arduino using pyfirmata we need a computer connected to the arduino.. the python program is put in the computer right? .. so instead of using a computer .. use a raspberry for the python code
Ah, I see now. I misunderstood what it was suppose to be
Looking at the code structure, it should work on a pi as long as the arduino is programmed correctly too
Is it possible to set RPI Pico with e-paper display to change actual display (e.g. from chart of crypto price to to-do list) every x seconds/minutes or by pressing specific button near display?
Dude, atleast read my question before asking those questions, You are one of those guys on stackoverflow who knows nothing but still replies to question with just anything,
I want to build my Own firmware flasher for esp8266, Flasher like the nodemcu flasher that flashes .bin files
A lot of various skill levels use this form and I tend to start off the bat by finding some general guidance than seeing what applies and going from there. I don't know if you're after designing a full fpga structure to flash or if you just need an an ftdi cable, or if you're going design your own board and need the circuit to flash too. If you're after nodemcu or want your own files flashed. I know your target hardware and that's about it.
The pico should be able to drive the display change no problem, however for updating the price of things you'll need a way to talk to the pico since there's no built in wifi
I guess it's need to be sent using USB cable or if I want to use it completely independently switch to RPI Zero W
Both options will work, the sent via usb isn't one I've used but I've got a pi 0w driving one screen, and have looked through some pico eink builds as well. They're both going to be fairly stable options
So in the end there's no big difference between RPI 0W and Pico if the main goal of project is showing something on e-ink display?
They are very different, but both are powerful enough to work in your setup. A pi0w is a full embedded linux device, so a lot of what you expect from any linux computer is running on a 0w. A pico on the other hand is a micro controller. It runs a bare metal version of python, or c depending on what you put on it. That runs your code and more or less only does what you tell your code to do.
Then I think I'll go with RPI 0W since I need WiFi connection to connect with API to get data of crypto + connecting with SSH to edit to-do list which will be also displayed is pretty much needed feature
Thanks a lot
Good luck!
Thank you but dunno when I'll be able to do this project since I can't buy a RPI 0W due to shortage of them lol
Are you able to get a pico and have it plugged into a computer?
I guess so but cable needs to be at least 1,5m to set up pico on my desk
Alternatively, if you're up for a little more advanced, you could get a pico and a module like an airlift to give it wifi abilities https://learn.adafruit.com/quickstart-rp2040-pico-with-wifi-and-circuitpython
I'm definitely more familiar with Arduino Uno than RPI pico but why not, I can give it a try
What kind of eink do you have?
so einks are going to require a boost converter, some have it built in
I don't have one, I want to buy one to test, see how it works and use it
Do you have a brand you're looking at? Waveshare makes one specifically for the pico
Adafruit also sells a section of eink screens (some with their own micro included) https://www.adafruit.com/category/150
Not really but from what I see only Waveshare are available online
And for a third alternative, there is good-display. I've never used them and I don't know how accessible their screens are. I've got a waveshare and an adafruit magtag
I checked and only Waveshare is available so no big choice
Given that, I'd try to make sure you get the pico ready one, just to minimize how much work you need to put into it
hello everyone
i made a while ago a custom development board based on the PIC microcontroller
now i wanted to program it using custom commands..so i want to make some kind of compiler
maybe compiler is not the right word... it's better to say code converter😅
i want to create a program that scans those commands and convert them into something else... is it possible?
I've been working on this Pi Alarm clock, and I'm using Pygame, and pygame.music.mixer to play audio, it runs fine when I manually ssh into the pi, and run it there, but when I try running it at boot, it doesn't work. Firstly, it seems like it waits until I've sshed into the pi to run the program, secondly, it has trouble opening the MP3 file for the alarm sound. I've tried editing rc.local, and .bashrc. Both don't work. I also tried booting the pi into a GUI rather than cmdline, didn't work. Is this just a pygame problem? Should I try a different lib for playing MP3 files?
If there is an alternative, it should be able to start, and stop, with code. Like pygame.music.mixer.stop() for example
SimpleAudio doesn't work on Linux systems, like the Pi, and PlaySound wasn't working on my PC or the Pi, Pygame seemed to work best with most people playing audio on the Pi
It does say that MP3 support is limited in the Pygame docs, as of 2015, and it recommends OGG, so I will try that next.
I tried OGG, didn't work, I also forgot to mention I tried adding a 10 second delay before the program calls the pygame.mixer function, didn't work either, I've seen MPG321, I'm still trying to find out if you can turn it off mid-song
How can I use a C module with micropython?
This is on docs, but idk if it's right
and if I can use on a esp
or only on pyboard
Hi, i am trying to use micropython with the esp8266 and use an bmp280, i have already installed micropython and it worked perfectly but when i try to use a library i have several errors, does anyone know any working library and how to use it?
@grand crater See above: #microcontrollers message
Hello any advice on how to start as a newbie on microcontroller?
Hi, I need help with something. I am trying to use the bmp280 sensor with an seeeduino xiao running circuitpthon 6x. My sensor is not adafruit orginal, it is one of the purple ones.
This is my code:
import board
import adafruit_bmp280
i2c = board.I2C()
sensor = adafruit_bmp280.Adafruit_BMP280_I2C(i2c)
And now i am getting this errors:
Traceback (ultima llamada reciente):
Archivo "<stdin>", l\u00ednea 4, en <module>
Archivo "adafruit_bmp280.py", l\u00ednea 442, en init
Archivo "adafruit_bus_device/i2c_device.py", l\u00ednea 50, en init
Archivo "adafruit_bus_device/i2c_device.py", l\u00ednea 166, en probe_for_device
Archivo "adafruit_bus_device/i2c_device.py", l\u00ednea 163, en probe_for_device
ValueError: No I2C device at address: 0x77
Some words are in spanish but i can translate them. Archivo=File, Linea=Line, en=in, "ultima llamada reciente"="last recent call"
What should i do to fix it?
guys i wanna built a mini wheelchair prototype which i can control through raspberi pi ....can somebody tell me which dc motors should i use and what would i need for turning the wheels left and right (cos the dc motors only go forward and reverse)
Maybe stepper motors to turn the wheels, or just steer by using different motor speeds on either wheel or driving in a different direction (kinda like a tank)
How to start programing Arduino
By buying one, plugging it into computer using attached USB cable, downloading and launching Arduino IDE
Also I'm pretty sure Arduino uses more C than Python
Arduino is C++ from what I've heard
yeah arduino is C++.. currently there is no microcontroller programmable in python.. only micropython.. which is a python specific only for microcontrollers
Micropython is an implementation of python for microcontrollers, while some APIs are different, it's the same language
Circuitpython code in particular aims at being run as-is in C-python (on a raspberry pi for example), thanks to Blinka bringing the missing libraries to C-python
ok thanks
i dont know if i should ask this here but i am helping my friend build a machine that automatically cooks food for his science and engineering fair but i dont know circuit to use. he wants to be able to control motors and maybe make an user interface. any help would be appreciated
Raspberry Pi
How sophisticated will the operation be?
he only gave me the rough drafts he said his 3d model lisence expired or something but i think that he needs the motors to operate a box to drop ingredients, a cutting knife, a nd a cooking pot
What language will you be using for this?
Nvm dumb question.
I suggest a raspberry pi of some sort.
do i need a breadboard
?
i dont know what a breadboard does the only time i used it was to power some lights
will i need it to run motors
ok thanks for your help
It's hella expensive for an engineering fair, tho.
75 dollars lol
yup
for advanced operation of servo motors you will need a microcontroller which never comes cheap.
an stm32 board is like 5bucks
and is a very good microcontroller
If you are going to use a Pi, a Pi Zero would probably be good enough. They are ~$20. Running a web app would allow you to use a phone, tablet or laptop wirelessly.
You could use an stm32 or esp32. A Pi would be a bit a easier with the user interface.
Servo motors would probably be the easiest way. These will cost a bit due to the forces at play.
You'll want to solder it up to make it robust. A breadboard will work early on.
There will be quite a bit of time needed to do it all.
a pi is easier than a microcontroller?? for real.. i though microprocessor are a bit trickier in comparison to microcontrollers
shouldn't you install the OS first?
Controlling motors, servos, etc are the same difficulty on a Pi and micro.
User interface will probably be easier on a Pi, more options
idk mam.. interfacing with a uC is also straightforward
Depends on what the interface is LCD + buttons, same difficulty on both. In this case I would use a micro.
I would like to write a program on my pc to control the led strips attached to an arduino, which is connected with usb. How would I do that? Send every "frame" a string to the arduino per serial port which contains the colors for every stripe? Or do something else?
i want to use a raspberry pi to rotate a servo motor 90° every 24 hours this is the script i have so far:import RPi.GPIO as GPIO
import time
servoPIN = 17
GPIO.setmode(GPIO.BCM)
GPIO.setup(servoPIN, GPIO.OUT)
p = GPIO.PWM(servoPIN, 50) # GPIO 17 als PWM mit 50Hz
p.start(1.5) # Initialisierung
try:
while True:
p.ChangeDutyCycle(5)
time.sleep(0.5)
p.ChangeDutyCycle(7.5)
time.sleep(0.5)
p.ChangeDutyCycle(10)
time.sleep(0.5)
p.ChangeDutyCycle(12.5)
time.sleep(0.5)
p.ChangeDutyCycle(10)
time.sleep(0.5)
p.ChangeDutyCycle(7.5)
time.sleep(0.5)
p.ChangeDutyCycle(5)
time.sleep(0.5)
p.ChangeDutyCycle(2.5)
time.sleep(0.5)
except KeyboardInterrupt:
p.stop()
GPIO.cleanup()
can you help me with this?
because the script I found on the internet and can honestly no python so I am now looking for help
you keep asking people who dont know about microcontrollers about help
 just wait for someone who knows about it
just wait for someone who knows about it
okey
i want to use a raspberry pi to rotate a servo motor 90° every 24 hours this is the script i have so far:import RPi.GPIO as GPIO
import time
servoPIN = 17
GPIO.setmode(GPIO.BCM)
GPIO.setup(servoPIN, GPIO.OUT)
p = GPIO.PWM(servoPIN, 50) # GPIO 17 als PWM mit 50Hz
p.start(1.5) # Initialisierung
try:
while True:
p.ChangeDutyCycle(5)
time.sleep(0.5)
p.ChangeDutyCycle(7.5)
time.sleep(0.5)
p.ChangeDutyCycle(10)
time.sleep(0.5)
p.ChangeDutyCycle(12.5)
time.sleep(0.5)
p.ChangeDutyCycle(10)
time.sleep(0.5)
p.ChangeDutyCycle(7.5)
time.sleep(0.5)
p.ChangeDutyCycle(5)
time.sleep(0.5)
p.ChangeDutyCycle(2.5)
time.sleep(0.5)
except KeyboardInterrupt:
p.stop()
GPIO.cleanup()
can you help me with this?
Posted a question about communication with an arduino in #help-pretzel
how can I get the RGB color code under my mouse?

is this possible ? - what is lowest cost for a WIFI - UART module , thingy -- and if it can use micro python would be cool
There must be an app that controls the RGB, I think you can get it from there
you can get the Esp32 board
I want to programmatically connect to a esp32 device, start bootloader and start flashing a image, any ideas how I’d do this?
Looking at esp32 a bit but getting permission errors (assuming it’s due to an existing connection)
.
is it possible to output voice audio, example like, Alexa on a Pi Zero, if so how can it be done?
https://learn.adafruit.com/speech-synthesis-on-the-raspberry-pi That may be what you are after.

im trying to connect my arduino as a slave to my pi using I2C bus do i need a bidirectional logic level converter?
What voltage is the Arduino running at? 3.3V won't require one.
i think its a 5V logic
It would be best to use one
yep its 5v
i was reading this article

In the third installment of our I2C tutorial, I will show you two methods of connecting a 3.3-volt Raspberry Pi to a 5-volt Arduino Uno. Code samples included.
it says u can do it but on all other forums i visited ppl said its a bad idea
You can do it, but if 5V somehow gets on to the Pi you can damage it.
Yes
R/2R voltage divider could work
i think thats litteraly the circuitary on logic level converter
They are more complicated
ah
whelp i dont have space on my pcb for too big a chip now i just gotta pray a converter fits
pinky nail small enough?
i think i have abt 1*1 inch area of unplanned space i was thinking of using for a relay module
but i can just stick the relays in the walls and run realy long wires
you could do it with 2 sot23 fets and 4 resistors.
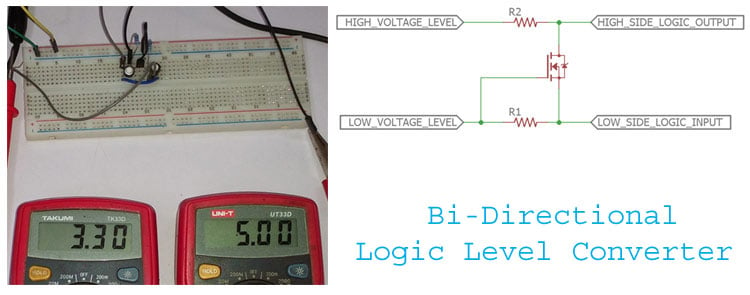
Circuit Digest
Bi-Directional Logic Level converter using MOSFET
so im trying to make a portable media player with a pi zero W and so far i am able to connect and play a song on my bluetooth speaker with pulseaudio. but since im running a headless setup I want to utilize the play/pause button on the speaker to atleast have some sort of control.
I am looking into the /dev/input/ directory in hopes of getting it to work with the evdev module but I do not see any event* files while my speaker is connected and playing. How do I approach this?
do bluetooth devices have a different directory for input?
I have an ESP32 with a MicroPython script (including urequests) running in an infinite loop. Now my device is installed into a 3D-printed case, and parts are soldered on top of it, so only the USB port is exposed. When developing in C with esp-idf, a connection via USB to the microUSB port of the ESP32 was sufficient to reset it and flash new code. In MicroPython that doesn't quite seem to work, unless I'm missing a command somewhere, you need to physically press the button(s) to reset it. Could somebody point me in the right direction with how to flash the board with the microUSB port only (and automatically)?
i have no money to buy a microcontroller
if it's in a loop, you should be able to halt the program with ctrl-C from the serial console, and then execute a command on the REPL to force the reset(machine.reset() ?), and it should be possible to automate that
no promises though
New to microcontrollers, can anyone recommend any (that u can use python with)? the cheaper the better
My requirements:
1. Can connect to the internet wirelessly
2. Can control LEDs and other components attached to it
3. Can run off battery power
4. Bluetooth (optional)
- psram
the ESP32 can do all of those
arduino + pyfirmata or Pyserial

Hey, I'm new to this, and need some hardware help with microcontrollers. I need a relatively small motherboard with button extension that can be able to run python and connect to the internet wirelessly and use a battery
Any suggestions?
A featherS2 might fit your needs: https://feathers2.io/
Hello, completely new to programming, want to learn python to make programs for the machines in the place i work, we use Allen Bradley PLC's to do automation, for the interface i want to start learning to use python, will add ohmeters, voltage drops, compare results, then determine if it is ok or no, and send a voltage out to a USB DAC
Where should i start or if you guys know of a good course or online school i can pay.
oh wow thank you...so this converts text into voice..pretty neat
i make robot
Ok thanks!
oke i have this 🙂
Which kind of pi? And what are you aiming to do with it?
@errant wigeon you can see here, if you can help, please do it
I use the raspberry pi 4 model b
has anyone used this ones?
https://www.mccdaq.com/usb-data-acquisition/USB-1608G-Series.aspx
I have problem with Arduino Uno R3 USB no work
im working with the raspberry pi pico I have 2 OLED displays set with in a function with their own code but when i call the functions both displays match depending on what function i call they are hooked up to diffident i2c pins is there a way to fix this?


#help-avocado help with my line follower robot on raspberry please?
Hey, We are going to build and code a ev3 robot and I'm not quite sure if i should choose Python ore MicroPython. Does MicroPython has library-support? And how well does it handle something like opencv?
This is a long shot, but could you rename one of the 'font_writer''s in the second instance to 'font_writer1'
i2c isn't my best game so I'm first going to search for an issue of accidentally shared memory
To run a python library in micropython there usually needs to be a port made. Because openCV relies on a lot of compiled c++, I don't know that a simple port is possible. I'm sure you can make a subset of opencv that solves some of your goals, but for the full module it might be easier to just use an embedded linux device like a raspberry pi instead. But that's going to depend on a lot of thing, maybe a small subset is all you need, at which point you're left trying to figure out how well it handles opencv--which is going to depend on the micro you use, how much memory it has, how much power it needs, and how fast you want to refresh the image processing feed
i got it i has to change one of the displays to a I2C1 pin but thank you anyways
Well congrats getting the solution!
guys what is max function in python?
if i use a ESP32 or ESP8266 as a full-duplex data link to a external micro controller -- is there enough security in WIFI connection ?
I am not qualified to talk about wifi signal security, it might be a better topic for the networking and security topic channels, but to start you off, here's a doc from espressif: https://docs.espressif.com/projects/esp-jumpstart/en/latest/security.html
i have 2 raspi B+ sitting for a year , i want to tinker with them - they will just be glorified WIFI modems , supplying a ful-duplex data link to a microcontroller - i want to use python 3 all along the way
tinker with raspi for now - replace with a x, y , z later
enough security for what? to use around your house? to install in a facility? to drive a rover on Mars?
read PH , water sensors -- turm water off on , send email or SMS if something critical
empty tank ---
facilities implement private wifi all the time, as long as you're using standard encryption (WPA2 is good) should be fine, bonus points for keeping the SSID stealth, bonus points for MAC addr filtering
basically the WiFi tech is pretty good for security, as long as you use it right
small steps - nice to know its doable - thanks
hmmm going to try using a RP3B+ , the GPIO for simple but my main goal is to use the usb-serial to a microcontroller - thinking modular
The pi can do usb serial communication
Is pyserial as efficient as using c/cpp code in an Arduino or STM32 series, like in features, speed, and more stuff?
It's been long time since I last used microcontrollers and just realised there's something known as pyserial to operate mcs with python 

I've been banging around with ESP32s and RP2040s in MicroPython and have only two requirements: a bunch of ADCs and the ability to do I2C master-slave. My understanding is that the PyBoard is one of only two microcontrollers that can do the latter (STM32 is the other). The ESP32 doesn't look like it will ever support I2C slave mode, and I've not heard a peep about the RP2040. So I'm now considering the PyBoard...
By my count there's 16 ADCs on the Pyboard. If that's all I want the PyBoard to do (i.e., I'm not concerned with using any of these pins for anything else), can I actually use all 16 as hardware ADCs? Is there something else I should know?
I couldnt find much source about pyfirmata . Do you have any source suggestion ?
I am actually working on image processing with python opencv . I want to use output variables on Arduino IDE which ı get from python . As ı know pyfirmata is the best way to do it but pyfirmata has a different syntax so ı am looking for any other way.
Hey does anyone have a tutorial/instructions for OTA updates using micropython for esp8266?
I don't really know anything about it, out side of a couple of posts online,
https://github.com/pfalcon/yaota8266
https://micropython.org/download/esp8266/
https://docs.micropython.org/en/latest/esp8266/tutorial/intro.html#deploying-the-firmware
I can't find too much.
This might be a question better suited for the micropython forum: https://forum.micropython.org/
since I image it's going to involve a fair amount of nitty gritty
Setting up OTA on micropython is much easier then Arduino - assuming you are talking about sending code to something on your WiFi. No idea about remote updates.
In the Thonny IDE it's very easy. All you do is write "import webrepl_setup" (one time) in the REPL and follow a couple steps. This creates a small config file on the device. Then you will need to swap to the WebREPL under options and add the ip and password. It worked fine on my esp32. Network will need to be set up first though.
Is there a channel somewhere for discussions about MicroPython? I would have thought so but I couldn't find it. I have question which could go here if there isn't a more appropriate place...
we use micro controllers - many are using micro python - seems this is the place
Hi, could anyone point me in the right direction. I'm learning how to decode control packets from radio receiver.
Got 6 bytes that are supposed to contain four 12bit precision values. (12 , 12, 12 ,12)
any tips on how to extract the 12 bit precision int from that?
Googling far and wide didn't get me anywhere.
Simple moduloing and bit shifting will do the trick
dank
What part of this are you having trouble with, do you have the 6 bytes that you're trying to return 4 values from, or are you still trying to get the 6 bytes from the receiver
got the 6 bytes in a bytearray. I'm having trouble splitting them correctly
Cool, are you using python or another language? We're going to bitbang it together, we'll need some bit masks as well, but that's just a part of bitbanging really
micropython
i just managed to finally get one correct value out of it
turns out the byte order in the protocol should be reversed
and then it seems to kind of work
so if i go: frame[6], frame[5], frame[4] .. etc
then bit mask works:
control_bytes = Bits(bytes=[self.frame[8],self.frame[7],self.frame[6], self.frame[5], self.frame[4], self.frame[3]] , length=48)
self.channels[0] = (control_bytes.int & 0x000000000FFF)
yeah, i've tried so many things but was getting garbage out. and even times where it kinda looked like itworked, adjacent channels would "bleed" into the value
on the positive side the whole bitmasks and bitshifts slooowly starting to make sense
It takes a while to start clicking, and then (much later on) it'll take a while to remember how to use it. But at least for me, it's become my main way I deal with anything byte level. Even if I don't need to, I throw a byte mask (my_byte & 0xFF) just to be extra sure I'm only dealing with a byte at a time
interesting, that's sounds like a good practice! the above is part of my attempt implement a protocol from pdf spec for the first time and i already have ran into the issue you describe 🙂
god i stil lcan't get over how weird the byte order is. it sends the bits for the 4 channels like:
1111 1111 2222 1111 2222 2222 3333 3333 4444 3333 4444 4444
I wonder if that ordering is for error resistance.
the spec does specify the byte order is little endian
don't know why it was chosen, but good for them to pin it for consistency. From my limited understand of endiannes i expected the 12bit blocks to be together
*shrug*. But nice job slowly debugging it and figuring that out!
@errant wigeon thank you very much for your support on this!
next step: they send checksum at the end of the packet. going to figure out how to calculate and validate it
They show the checksum function they're using right?
yeah, it's mentioned in the spec: 8 bit CRS using CRC-DVB S2 algorithm
Looks like there are a few implementations in python online that you can use to check against your implementation if it's giving you trouble
:incoming_envelope: :ok_hand: applied mute to @hallow igloo until <t:1631243925:f> (9 minutes and 58 seconds) (reason: mentions rule: sent 6 mentions in 10s).
:incoming_envelope: :ok_hand: applied mute to @hallow igloo until <t:1631243926:f> (9 minutes and 59 seconds) (reason: mentions rule: sent 6 mentions in 10s).
:incoming_envelope: :ok_hand: applied mute to @hallow igloo until <t:1631243926:f> (9 minutes and 59 seconds) (reason: mentions rule: sent 6 mentions in 10s).
:incoming_envelope: :ok_hand: applied mute to @rough kestrel until <t:1631243929:f> (9 minutes and 59 seconds) (reason: mentions rule: sent 6 mentions in 10s).
!silence
well that explains my mysterious pings
was i pinged?
Wow, got pinged in plenty of servers😂
Guys can anyone help me with interfacing hardware with python... in particular a fingerprint scanner... is it compulsory that I must purchase a fingerprint scanner with exposed APIs (costs more than an average fingerprint scanner both online and locally) (weirdly) or can I try to access the device via usblib as long as windows is able to work with it with appropriate drivers installed?
Any help is appreciated! 😊
are you looking for something like this?
Yesss I did check adafruit out... but the hardware costs alottt.... and I feel it's just tooo costly 😂
I could find it only on Amazon... and it quoted 15k Indian rupees... which is just aloooot (for me)😂
@errant wigeon
which is why I'm thinking there has to be another way to talk to hardware if windows can talk to it
do you have one in mind? it's hard to say what you'd need without knowing what you're looking at
well, I actually don't have one in mind.....
I'm currently collecting information/material and like figuring out how my project needs to go on... and I'm somehow stuck on the very first step of getting a fingerprint read by python 😩
I want to figure out if I can use ctypes to maybe get a normal fingerprint sensor working with python
What are the conditions of the project: do you need the scanner, or can you simply take pictures of fingers and extract the finger prints that way?
umm yess I so need the scanner cas I'm designing a full fledged auth system with it 😂
or like atleast show the working of a full fledged auth system with it
for most online services n all
aliexpress probably will offer you a selection, but until you know how it communicates, it's going to be really hard to know how much additional money you'd need in other electronics, and how much additional time you'd need to devote to just figuring it out. it's the rough cut of it, cheap things are cheap, but that might mean there's not a whole lot of information on them.
ah rip me then
Not necessarily, but there's a chance it's going to be a struggle. The sooner you choose a candidate scanner the more time you'll have to look it up and see if someone else has gotten it to work for them
Soooo I got some great news and thought I'd share it with you @errant wigeon , I found a local Indian company that manufactures fingerprint/iris and a bunch of other biometric scanners for official / government registration purposes. I also found that they expose the SDK for the device. Plus the price of the device is 2k INR(30USD) compared to 15k ada fruit. I'll wrap the C++ SDK around with python and do the rest. I'm soo relieved rn. Thanks for ur help
I was almost ready to download some drivers and decompile them and then scrap through the source to wrap it around python. Glad I don't have to do that now
Whoop that's fantastic to hear! That should make the process much nicer to work with!
I posted this in the help channel but was referred here.
I've got a raspberry pi zero setup to drive tank tracks. I'm using a socket to connect from another PC and send inputs to the client. Here's the file giving me issues, https://github.com/Niall47/piTank/blob/experiments-with-sockets/client.py
I'm getting this error, which makes me think it can't find the GPIO object from the client() method even though the cleanup() method has no such issues. I thought declaring it outside of a method would allow it to be used globally.
Pin 16 is an LED in case thats relevant here
Resetting GPIO pins
Connecting to server
Traceback (most recent call last):
File "client.py", line 113, in <module>
client()
File "client.py", line 83, in client
GPIO.output(16,True)
RuntimeError: Please set pin numbering mode using GPIO.setmode(GPIO.BOARD) or GPIO.setmode(GPIO.BCM)```
TLDR: How do I ensure I can modify GPIO pins from anywhere in the project?so uhm is it possible train a ml model in your pc then upload it to arduino uno/nano? any resource would be appreciated
So I just spent an hour wondering why my esp8266 wouldn't flash... Only to suddenly realize "oh.. it's an esp32" #timewellspent
is there anyway i can add more columns to the sqlalchemy without dropping my whole database and rewriting it
class Students(db.Model,UserMixin):
id=db.Column(db.Integer(),primary_key=True)
fullname=db.Column(db.String(50),unique=True,nullable=False)
email=db.Column(db.String,unique=True,nullable=False)
personal_email=db.Column(db.String,unique=True,nullable=False)
password=db.Column(db.String(),unique=True,nullable=False)
dialling_num=db.Column(db.String(),unique=True)
branch=db.Column(db.String())
occupation=db.Column(db.String())
def __init__(self,fullname,email,personal_email,password,dialling_num,branch,occupation):
self.fullname=fullname
self.email=email
self.personal_email=personal_email
self.password=password
self.dialling_num=dialling_num
self.branch=branch
self.occupation=occupation
def __repr__(self):
return f'Student:{self.id} {self.fullname} {self.dialling_num} {self.branch}'
i wanna add some other columns like github linkedin and website ...
i really dont understand what youre doign here
you set pins to output
then call cleanup and disable their output
then try to use them as output
why are you calling cleanup before client
one of my servos rotates the wrong way, i mean if i do simple code like:
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(10);
}
void loop() {
myservo.write(0);
delay(1000);
}
it starts doing full rotations (which shouldnt even be possible since it's a 180° servo)
sorry if it's not really python related but i need this for a project with pyfirmata
also i tested with some other code and it works fine with most angles, except for some (like 0) where it does what it did with the code above
hey guys , im pretty new to programming , and im looking for some topics i should learn about to use in the robotics domain using python or c++
so you want to know what you should know in order to work with robotics?
oh yeah, i found it. I just find out about circuit python. Is it possible to code my arduinos on it? How is it dif from regular python?
there is Arduino channel. I think they can help u with it. FYI sometimes servo from china is buggy ^.^
yeah
Learn the basics of python
You can't work on robotics using python without knowing python
i have this project i would like your opinion on it i, i want to make a robotic hand as you can see i finished with the iron working i have a arduino uno a motor controller and two motors i am not sure what i need to buy and what would be best (i know the very basics of python and arduino code)

how are you planning to move the hand
looks like a tendon based approach is most feasible for how you've built it so far
i.e. a string on the back and front
yeah thats what i was going for
im using plastic strips
and
was planing to use springs to retract the hand to a defalt position
and then pulling the plastic strip
would retract the hand
hmm well
springs and string is another apporoach but you can make a pulley system with string to give you control over 'pulling' the hand open as well
hang on a sec
or
this uses bike chain to stay rigid

Another video to share the progress I've made on designing and prototyping my hybrid myo mechanical partial hand prosthetic. This video documents the addition of the splay function.
#robothand #prosthetic hand project #diy
How viable is this project? I want to create a security camera using my pi zero + camera add-on for my bedroom to prevent housemates stealing.
My idea is to have it pointed toward my door. When motion is detected in the frame the camera will capture a still image and store it on Azure (also learning cloud computing currently and wanting to test its capabilities). I also want to be able to access the camera via IoT services on Azure for a live feed.
yeah i dont mind as long as it is for my beginner projecects so i'll just buy 4 more for 10 bucks lol (that might be why they dont work)
i more vertical - less round
sounds pretty viable to me
does the raspberry pi pico need a raspberry pi 4 to work
you need a computer, any computer, to program it
No it doesn't. To program it, as Neradoc said, you will need a computer of some sort, but it doesn't need to be a pi.
https://www.pyimagesearch.com/2015/11/09/pedestrian-detection-opencv/
https://www.pyimagesearch.com/2019/04/15/live-video-streaming-over-network-with-opencv-and-imagezmq/
https://www.pyimagesearch.com/2019/03/25/building-a-raspberry-pi-security-camera-with-opencv/
These might provide some solid starting points for your setup
Where did u get this pattern? Doesn't look impressive. Try copy the hand from Terminator movie. Hm... for fingers i do not think is a good idea to use servo. Servo itself very big, unless u will find the way to use leverage but here, mb it's better to use oil or pneumatic liner piston? p.s. i am GOD 😛
actually no
first i came up with the idea of how i wanted it to move
then i made the design
and it looks far to shity to be in the terminator movie
but the way it moves in already done
i just need a way to pull a "string" and im asking you all what is the best way to do it
also the right to be called god is not easy to come by
are you sure you are a god
oh yeah. deadly sure 🙂 i recently asked the same question. Apperently there is a lot of servo motors of different power, but as rule they are pretty big. Also step motors. It's pretty much depends rather u want them just move or actually hold something. The most chip, relatively small and common is SG90. But I had one, didn't like it. I wanna try DS3218, DS3225 and DS3230. They should be pretty powerful but also much more expansive ^_^
i was actually planing on like a using a "semi stepper motor" as in it can only lock in at one position
witch ill make the mechanism my self
and for procesor i'll use a arduino connected to a raspberry pi
so in other words
the most regualr ass motor
is fine
i dont need very accurate movement
just decently strong
then try SG90. It's chip, if u don't like it u can always through it out. Use analog signal and has 180 degrees rotation range. Well, a bit less then 180, it's chinese 🙂
okay sorry for being a noob but how dose rotational range matter?
depends on construction and where u use it. but in your case u probly can just use leverage to achieve needful length of movement. And I also a nooby a bit 🙂 but still a god 😛
I AM THE GOD OF monty PYTHON
oh... nuh I am god of thunder, like thor only without hammer 🙂
ᚷᛟᛞ ᛟᚠ ᚦᚢᚾᛞᛖᚱ
mb u can teach me python a bit? i just learned a syntax a bit. Do u use python to code arduino? what u use circuit python?
also
im not actually verry good at python
i have written some screen scrapers and stuff
kk
Does anyone know a good low-latency streaming solution for rpi? Or is UV4L webRTC still the best going?
just ask your question
i need help in coding of ardiuno
u reply me
i will tell u the proper info of it later
just ask here in this channel
anyone familiar with urequests? im trying to make a post request to a google form
req = urequests.request(method='POST', url='https://docs.google.com/forms/d/e/1FAIpQLSddBmmsY23R3EQDZ6rMXS0QKpr2yAXYW73A948B8no220BooA/formResponse', json={'entry.310074266':'pizza'})
whenever i run similar code using the requests library from my pc it works. this code seems to submit the response but the data is not being read
like it comes in that someone responded but it is not reading in the desired response (pizza)
if i try using data=... instead of json=... i just get an error
could i just have a old version or smth
i'm trying to flip a single bit from 0 to 1 in my arduino code with a python script
this is what I have:
arduino:
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
}
void loop() {
delay(100);
Serial.print(x);
if(Serial.available()){
x = Serial.parseInt();
if (x){
digitalWrite(7, HIGH);
}
}
}```python:
import serial
import time
arduino = serial.Serial(port='COM3', baudrate=115200, timeout=.1)
time.sleep(.05)
arduino.write(b"\x01")
arduino.close()```the arduino code works fine, and writes pin 7 HIGH if I open the serial monitor and type in 1
but the python script doesn't work, even though it's on the right port
python says it wrote data, but the arduino doesn't set pin 7 HIGH
Anyone know where I can begin in python with arduinos and robotics?
is '\x01' for pin 7?
I actually solved this just yesterday by changing the write line to:
arduino.write(bytes("1", "utf-8"))```oh nice
but I appreciate the help
so it's actually expecting the 1 as a decimal character O.O
honestly, I'm not really sure why it fixed it
yeah. Now I'm just trying to figure out how to get 9v from my battery to my motor using a relay module
then my AI powered nerf turret should be operational
hello
does anyone know if python strings are null terminated by chance?
I don't believe they are
yeah I agree w u
hi
python strings are objects
@torn yarrow they're not C strings :D
How does one program microcontrollers with Python? Does it have to be a certain kind of microcontrollers?
Hello i have a general question about arduino
I want to transfer data from the arduino to my nodemcu
Using software serial.h,but i am getting a lot of errors, and i have been stuck w it for a few days
Could someone please help me out
Im currently using a Raspberry Pi Zero W in gadget mode to send USB HID events to act as a remote keyboard, but I'm stumped on the mouse side of things. I'd like to be able to provide both relative AND absolute positional data ( 150, 220) or (+51, -111) but I'm stumped right now since it looks like in USB Gadget mode, there isnt any reading of mouse positional data. Any suggestions on where to start? using python and not cpython or circuitpython or anything
thanks
anyone here use platform.io
Has anyone played around with MicroPython/CircuitPython as a means to get better performance out of Python?
I think I'll play around with it later today, but thought I'd ask the question to see what I can expect or if someone has had similar ventures into it.
Hi there, this question is a bit out of the norm, I was planning to buy the rasberry pi kit or similar kits. Not sure what they are called. If someone has used it, could they tell me the ups and dows of different devices?
Well it would depend on your project
What you want to work on defines what you're going to buy, generally
Unless you just want a full computer system, in which case the rpi 400 I think it's called? The one built into the keyboard. It's probably once of the better choices, that or a full kit of whatever the latest model out now is.
@solid birch ^
not me
everything in python is an object. functions, classes literally everything
check the baud rate between devices, maybe you send data too fast and the other device can't keep up
Yeah the baud rate for both is at 4800
But idk it keeps throwing errors
And sometimes the port is not recognized
internally not everything
What Beef Wellington said...
With a rPi 400 or rPi 3+, 4+ etc, you'll have access to the full python suite. It's just a debian installation for ArmHF...
I've been playing around a bit with the rPi Pico and micropython.... It's also quite nice...
It just depends on what you want to do with it...
The 3B+, 4B+ models are the standard ones... Probably one of those would be where you might want to start.
Unless you want an all in one, and in that case go for the 400...
The 3A+ model is similar to the 3B+ however it does not have an ethernet port. This reduces cost a bit but consider that 98% of STLs out there for cases etc have the B+ models in mind...
The rPi zero (W) is good as well but very, slow compared to the standard models.. I would only use that where space and power consumption was a big issue... Develop on a B+ model and test/implement on a zeroW if that's the form factor you need....
who the hell is beef wellington
I would not anticipate it to be more performant, micro/circuit python adjust the language to have a very small language footprint, and that frequently comes at the cost of speed in some areas. What kind of performance gains were you thinking of? (Because smaller memory usage is a performance boost if memory is your bottleneck, so maybe that is what you're after)
something tells me this aint good

^^ that was my code for a camera to be used on a robot ;-;
Try set different speeds
Slower on sender, faster on receiver
Alrightt, thank you will try that
Also the nodemcu keeps heating,should i add resistors to bring the voltage dowb
i have nothing funny to say - keeping you posted
Someone from the help channel told me to come here and maybe I'd have better luck here. So um, I have a raspberry pi and I wanna use something like a servo motor, but I needs to able to go up and down, not just left and right. Is there anything like this?
Servo's rotate around an axis, so up and down vs left or right aren't what they do.
This has a lot of basic motor and motion aspects in this: https://openbuilds.com/builds/v-slot™-belt-pinion-example-build.97/
And while it won't work by being powered off of a raspberry pi, it might help you narrow in and describe what you're looking for
Thanks
i was working on a self driving car using arduino and python(i used tenserflow)
did not end wlel
i used a cheap old gopro camera and some ultrasonic sensors for the final model
turns out those ultrasonic sensors were rlly bad
and the car crashed hard
ill restart that project someday
Hello
Inspite of changing the baud rate
I am recieving garbage values on my nodemcu and i cant send data from arduino to nodemcu
Could someone please tell me where i am making a mistake
Does it need a pullup resistor for the serial communication?
I do not know,but i haven't used a pullup resistor
Just the software serial.h library
which arduino are you using?
Arduino uno
I followed this code

Arduino Forum
@OP There are many many logical/physical problems in your setup and codes. Therefore, I have preferred to prepare a tutorial for you rather than adjusting.correcting your system. Please, follow the steps; be familiar with the basics of hardware/software UART communications and get a working project. 1. Make the following setup among UNO, NodeM...
Oohhh
Ok, so the arduino uses 5v logic, and the nodemcu uses 3.3v logic
Are you trying to get both to communicate to eachother, or is it only one reporting to the other?
I'm trying to get the arduino to communicate to the nodemcu
So i connected pin 2,3 of arduino to pin 4,5 of nodemcu
I connected the 3.3v pin of arduino to nodemcu
Is this where I'm going wrong?
between the two you'll need to connect ground as well, and you won't need to connect the 3.3v together
Because the arduino gpio goes at 5v, you'll want to make a voltage divider from the arduino's signal to knock it's voltage down a little so the nodemcu can safely read it
But going from the nodemcu to the arduino is a bit trickier, if the node mcu needs to reply and the arduino isn't able to tell what the reply is, you might need to boost it's signal a bit, products like this: https://www.sparkfun.com/products/15439 help with that problem
Ohhh okayy I'll do that,thanks a lott!!
Connecting the ground is going to be the most important part of this though as a heads up
Ohh okayy
If i want only the arduino to send data to the modemcu
Should i still use this?
then the voltage divider should work, which is just two resistors in series
Yes i connected the ground of the arduino to the nodemcu
Is that what you are referring to?
Correct
Alrightt
Could you please explain to me why the voltages matter cause i am not getting a clear idea
Yeah no problem
Do i have to read up on the CMOS used ?
do you have a few resistors on hand?
Nope i don't have it right now,i will go tomorrow and buy them
Ok, so we're going to use a resistor based voltage divider.
Basically, if I have a 5v signal, and then have 5 1k resistors in series, I can check the voltage between each one in between the 5v level and the ground
5v - -vvv- -vvv- -vvv- -vvv- -vvv- -GND
make sense so far?
Yess makes sense!!
Ok cool, so if we measure along in between each resistor, you end up with something like this:
5v - -vvv- -vvv- -vvv- -vvv- -vvv- -GND
|4v |3v |2v |1v |0v
Since resistors drop voltage linearly, we can use it to change a signal at some input voltage to some other smaller voltage, we just need to calculate what resistors we need
And because they come in a lot of sizes, you don't need 5 resistors, you can just use too
Ohhh okayyy, i understood it thank you so much
Also, we are getting it down to 3.3 V because the nodemcu operates on 3.3V too??
So lets say we're going for 3v logic levels instead of 3.3, we could just use a 2k resistor, and a 3k resistor connected up, and between the two you would put that to the node mcu
And if the voltage levels dont match you can't send the data?
arduino TX - -vvv- o -vvv- -GND
| |
NODEMCU RX,GND
the first resistor would be 2k, the second would be the 3k
so every microcontroller can see a pin change with some degree of accuracy. If it's a 5v logic chip, it can tell a 0 is a 0, and 5v is 5v, but the middle range, about 3 v, it has trouble determining if it's a 0 or if it should be a 5v signal
that's why you have to pay attention to level shifts between microcontrolllers
you can /send/ data, but you don't know if it'll be understood
Ohhh i did not know this
Thanks a lottt!! 😁
So with this at nodemcu the drop falls?
so the node is getting 5v when it only wants 3.3--it should be able to tell that it's a input and not a 0, but because it's getting a lot more voltage than it wants, it might be causing some power issues elsewhere in the circuit causing your signal issues
The voltage divider probably isn't the exact reason you're having issues, but it is important to use so we don't need to worry about weird power problems as we debug the next bit
You're making sure you're connecting the arduino tx to the node mcu rx right?
Alrightt
Just a question, what exactly was happening when i connected the 3.3 V pin pf arduino to nodemcu? Was it making a difference?
so that's not somethign you want to do
Not directly using the software serail.h i used pins 2,3 of arduino to nodemcu 4,5
2(rx) to 5(tx)
you mentioned it was oddly hot, I'm not 100% sure, (because tying different voltage levels together something I'm not good at) but ... ok that's different one moment, I'll finish this thought then I'll describe the serial comms pins
Okayy
so if you connected the two power pins together, you'd end up with some weird competition. Basically the voltage levels are maintained by a voltage regulator. It's a device that tries really hard to keep the voltage at a very specific level, but it's a real part in the real world, so the regulators can sometimes be a bit different. Some will keep it at 3.28, others at 3.304, etc. Those little differences can cause competition if there's nothing between the two to absorb the difference. Most of the time the competition isn't that big of a deal, but it can cause weird things. If you put a resistor between to perfect but different 5v sources (who's grounds are tied together), then there will be no current flowing across the resistor at all, and it'll use no energy. But if there's a small amount of difference between the two 5v sources, the resistor can take that difference, allow current across, and 'drop the load' between the difference of the two real 5v (with real imprecision) power sources. That's a good buffer between the two 3.3 v pins, but in practice, you almost never need to tie two voltage regulators like that together unless you're doing some power focused project (it happens a lot more now that folks are making at home batter charging banks, but we'll assume you're not going to explore that area yet)
But for the logic pins on the TX and RX, it isn't a voltage regulator that you're tying together
When you're connecting the TX of one uc to another's RX, the first (the TX) is a pin which is set to an output. That mean the microcontroller is only going to tell the pin to output either 0v or VCC (5v or 3.3v or whatever it's logic level is)
The RX pin is listening for the voltage across it to change, either to it's high volt level, or close to it's ground level
Okayy this makes a lot of sense
Thank you so much, I'm getting a clearer as to what is going on
This voltage regulator is inbuilt in both the nodemcu and the arduino right?
it has a resistor that drops the input on it to ground to dissipate the energy, but like you can measure voltage on the series of resistors we were talking about, it can tell if the voltage is high or low
Here's a few much more comprehensive explanations as well: https://forum.arduino.cc/t/how-is-the-state-of-a-gpio-pin-detected/237312/2
When you say 'this voltage regulator' what do you mean? (Just so I'm sure I haven't miscommunicated something)
The device that tries to maintain the power (5V/ 3.3V) at a constant voltage level
ah, yes, give or take. It gets nitty gritty, and stops becoming completely true as you learn more about the lower level stuff, but for your ability to think of what's going on that'll work
The device has a limited amount of power and current it can provide, so if you exceed that current on a pin, you'll start to run into some weird issue caused by power failures called browning out
Ohhh😬😬
Unless you're putting a ton on it, you won't have to worry
Alrightt, thank you so much for this explanation!!😊
Was extremely helpful
I will read the article ,and try this out tomo
Okayy
awesome! Chance are there's another issue, but with improper logic levels it makes it a lot harder to find the real issue, so I figured this was a good place to start debugging
Okayy, yeahh i tried changing the baud rate many times but i did not do anything related to the voltage levels
Also, the 3.3 V and 5 V pins on the arduino are the output pins which are voltage regulated (if i got it correctly )
Umm, the only connections you should need are
a wire between the arduino TX and the nodemcu RX (which will have a voltage divider)
a wire between the ground of both uc
Okay yes
But should i connect it directly? i thought i shouldn't do that since im using the software serial library
I'm afraid I don't quite follow what you're asking
I think I was unclear, which ever pin you're using as the RX, that's the one you connect to
Pin 0 and pin 1 of arduino are hardwired as rx and tx so i am not using those
I got your point, i will try it with a single wire
I was using two wires
Make sure there is one wire tying ground together, give me a few minutes, I should be able to get a picture of what it should look like
Yes yes i will
Okayy
The wiring here is highlighted for just the connections, Red is the TX signal from the arduino, peach is the first resistor in the voltage divider, green is the middle of the voltage divider that goes to the RX of the node MCU, blue is the second resistor in the voltage divider, and black is the ground

Here it is without the highlights and just wired up. Not the best angle, but it should clarify how the two should be wired

I don't have a node mcu so I choose something with a similar form factor. I randomly selected pins for the signal though because I don't have the pinout of the node mcu, your circuit will probably have a different pin connection/selection
I had some time to re-evaluate this today and look into it more. Mostly what I was considering was the memory aspect but with your explanation of "very small language footprint, and that frequently comes at the cost of speed in some areas." it seems like I would just be using the wrong tool for the wrong job.
Thank you so much ,i understood the connections!!
I was talking about the red wire. I had connected it to pin number 3 and using software serial.h library, had given it the function of tx
I will rig this circuit up and try it
I think this is where i have made the mistake
I will change my connections and the code
Heyy, i tried your connections and i am getting the data !! Thanks a lot😁
But there is one more problem i can't figure out
The nodemcu is able to read only 3 lines of code after which it throws errors again
Is there an issue with my code? Or should i debug my connections again?
3 lines of code or 3 lines of communication from the arduino?
Also whoop! Congrats on getting a bit further, that's great!
3 lines of communication from arduino
I can show you the pictures of my code and the output
Haha thank youu!! 😊🙈
if you could, can you post the code?
If it's too long, use https://paste.pythondiscord.com/
if not you can paste it here
Hey @woeful crypt!
It looks like you tried to attach file type(s) that we do not allow (.ino). We currently allow the following file types: .gif, .jpg, .jpeg, .mov, .mp4, .mpg, .png, .mp3, .wav, .ogg, .webm, .webp, .flac, .m4a.
Feel free to ask in #community-meta if you think this is a mistake.
#include<SoftwareSerial.h>
//#include <ESP8266WiFi.h>
SoftwareSerial SUART (4); //conneted to D2
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
SUART.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
//String msg = mySerial.readStringUntil('\r');
//Serial.println(msg);115200
//byte n = mySerial.available();
if (SUART.available())
{
char x= SUART.read();
Serial.print(x);
delay(100);
}
else
{
Serial.println("error");
delay(100);
}
}
this is the code for nodemcu
Okayy i have posted the nodemcu code here and pasted the code for the arduino using the link
I think i am making a mistake using software serial.h and the arguments i am giving in it
what is the output you get from the node mcu?
I get this-"the distance from the target is 74.27 and the servo angle is" after which it only shows error until i press reset
I tried sending just " hello from arduino" at first
Nodemcu would output this 3 times perfectly but later show garbage values
could you show me the output? that the nodemcu prints?
I unfortunately did not take a picture of the output :/ i dont have any of the components with me rn so i can't rig it up and show
Ok, no worries. I just can't quite guess what the error is without knowing what the garbage values are--sometimes it's specific garbage that's very informative, sometimes it's just noise
does it ever print 'error'?
and why are you using delay? (I've never used it, it's a new one to me)
For the "Hello from arduino "
After a point it would show
HHHHHHH
Always H?
It did print it error cause we have given it in else

Okay my friend had taken it😅
Umm yeah
And sometimes it would start showing from "from arduino"
does it ever start working again after running for a while?
Since the output was coming too quickly we used delay function to slow it down
Nope, when i press reset it starts working again
can you remove the delay from the if suart.available() block?
When i removed the software serial SUART and directly connected it to nodemcu rx it showed an error of board not being detected
After serial.print?
yes
I did try w/o the delay at first
I'm wondering if the arduino is sending too many messages too fast, and it keeps overflowing
It was just showing error continuously, and when i press reset it would show "arduino"
it would say error, since there's nothing recieved. You can comment that statement out for the moment
Yess! I was thinking the same
But i cant understand how /why that is happening or how to debug it
Okayy
additionally, try making the arduino sleep for 1 second between each transmission
How do i do that?
that'll help us make sure the arduino doesn't seen too much
In the loop for the arduino, just add a delay(1000);
Like in the void loop itself?
yes
Do you think i have done a mistake in the software serial part?
Cause i tried removing that and connected the pin directly to rx of nodemcu
But it showed an error saying board not detected
Okay, could you please tell me where in the void loop🙈in the beginning?
Did the computer day board not detected, or did the node mcu say board not detected?
You haven't posted the arduino's code yet, just the node mcu
😂😂
I'll just paste it here?
yeah go for it
Oh you get a url once you save the code, unless I have that I can't see it
When i ran the nodemcu code the compiler said the board not detected for some reason
so for that, disconnect the wires to the node mcu while you're uploading code, upload it, and then you can reconnect the wires
Looks like you send a message only once every 10 seconds + 1 second for the ultrasonic sensor
are you waiting that long before you reboot when you're testing it?
Yes yes that is exactly what i did
Yeah
I did not get you
did you try again in that case? Sometimes it's just glitchy
I never tried testing it without the delay in the arduino
Sorry, that was unclear.
When you say the nodemcu isn't getting the messages, did you wait more than 10 seconds to see if a new message came in from the arduino?
Yeah i tried it twice until i stopped and had to restart the laptop
how long did you wait before you stopped?
Okay yeah i think so
It would show error and then distance and then the error again
Oh!
I think it's working then!
That's what your code says to do
So, let's break it down
Looking at the arduino first, you have a delay of 10 seconds present. So it only does things once every 10 seconds, and when it does stuff it takes a second to read from the ultrasonic sensor
so once per 11 seconds it'll send a message
On your nodemcu side, it'll print the message when it gets it. But once it's done printing, and once there's nothing in the serial buffer, your code says to print 'error'
it's able to print the arduino message pretty quickly, (less than a second)
so after that, there's nothing else to do but print 'error' until the arduino sends another message (about 11 seconds from that point)
Ohhhh alrightt thanks a lott!!
If i want to send it instantaneously what would i have to do?
well, the ultrasonic sensor needs to wait a full second to get it's reading according to the way you setup the code
Is it possible cause i have the ultrasonic too and i want that part to sense slowly
so one message a second is about as fast as you can send things
Oh okayy
now you can have an error that prints if you haven't received any message within a given time frame
Yess
I will try this tomorrow, waiting for a min to see my output
But i am not able to understand the part where it just shows HHH when i send hello from arduino( is it cause i haven't used a delay for that code and the arduino is sending a lot of data at once?)
That bit is a bit confusing to me too
I want to see what it looks like, and the arduino code you're using that generates it
is it cause i haven't used a delay for that code and the arduino is sending a lot of data at once?)
I think that's the cause honestly
Knowing that the sensor code works, and that we're getting the correct messages from it makes me pretty confident that you're overflowing the nodemcu by not delaying a bit between sends, and by having the node mcu delay between prints
@woeful crypt check your board baud rate

I don't think it's that
I don't have a picture of that output but this is the code i used
ok you've got a delay there.
Ohh okayy, i also have a question
In my nodemcu code i have declared char x is it incorrect if i use char x[] cause that gave me errors too
Use 115200 baud rate with node mcu
But is half a second too less?
It shouldn't be. Micros are pretty quick.
Initially when i was using software serial for arduino too, i had given pinmodes for pins 2 and 3,i dont get why i don't have to that for nodemcu
I tried it w that, doesn't work
It outputs "???"
Both micros need to be on the same baudrate, you were on the same baud beforehand, and since you're getting communication between the two I really don't think the baud is the issue
Yeahh the baud rate isn't the issue
I did use the same baud rate
Can you check the COM port from device manager ?
I think the issue is more tied to how we're reading from the nodemcu serial rather than a connection issue
Do you mean the char x part? Or that i have used pin 4 as SUART?
The ESP8266 has two hardware UARTS (Serial ports): UART0 on pins 1 and 3 (TX0 and RX0 resp.), and UART1 on pins 2 and 8 (TX1 and RX1 resp.), however, GPIO8 is used to connect the flash chip. This means that UART1 can only transmit data.
while (SUART.available()){
char x= SUART.read();
Serial.print(x);
}
Try adjusting the code to this, it should help make sure we clear the buffer before we exit out in the loop
Alrightt!! I will do this thank youu:))
Could you please explain to me what happens when char x is declared as an array
So this bit is just declaring x as a character
serial read returns a byte at a time, so it's just using one byte per character, then in the next line you're printing that character. Because there's not added new line character, the next character you print gets put in right next to it when you look at it in your serial read port
A character array (string) on the other hand is an array whose elements are of the type, 'char'. you can have integer arrays as well (and you can get crazier pretty easily)
Okayy yess
Have you added that json file in board preferences URL ?
Json dedicated for esp8266 board configuration
Right, so to read the entire string in the array i will have to modify the code?
Yes i did
Ohh okayy
So when declaring it as a character array, you're telling the computer this is going to be an array of elements who's contents are characters. But your computer needs to know how big it is, or be told to get a little bit more memory than it had and add this to it. In c that last option is a bit more difficult
https://www.arduino.cc/reference/en/language/variables/data-types/array/
This is a good intro on the datatype
We'd want to store the values somehow, so yes we'd modify it in some way. But you can also parse the incoming string and look for the values you're interested in and only store those instead of the full string. Or you can save the full string, and as you get more just refill the buffer. There are options, it just really depends on what you want to do with the information from the serial input
Ohhh alrightt
I gave it like this char x[1000]
I will check out the link, thankss
Ohhh, i hadn't thought about any of these
I will read up more on this
I want to send this data to the cloud and finally plot a graph
Thank you so much!!
That's very doable! And there's lot of ways to make it happen! We'll take it a step at a time though and get a better look at the serial communication issues. But there are thousands of ways to do it
Convert your data into json if you want to deploy it over cloud. I worked on AWS IoT Core and analytics with nodemcu sensor data monitoring and plotting
Anyone has maybe 30 mins to help a stupid noob? 🤦🙈

Basically i got in micropython only the epaper display working 🤦
And i need to get the rest working either 😬🤣
Heyy, you were right!! The code is working
I removed the error and it was finee
Just had another question, how do i parse the data that i am getting
Everything is stored in the variable x , so how should store that in csv file or transfer to thinkspeak
Does anyone have a solution for controlling a mouse/keyboard via a usb receiver from Python? This would be from a separate machine entirely
Could you also please tell me more about this
I will tell you more, what do you need?
User banned. Sorry about them @woeful crypt.
I'll be free to explain it in more depth later on, bit busy today
This should help outline it: https://forum.arduino.cc/t/arduino-serial-to-variable/37458
basically you'll want to take in incoming string, and store the values you want as a varible of some sort, a float or an array.
Then you'll want to connect to the internet and post the value to the site you're after: https://tttapa.github.io/ESP8266/Chap07 - Wi-Fi Connections.html
I have no idea how to use thingspeak, but this tutorial looks helpful https://nothans.com/thingspeak-tutorials/arduino/send-data-to-thingspeak-with-arduino
It sort of depends on how far away you are from the machine
Is it possible to use a windows 10 laptop as a monitor for a raspberry pi using an hdmi? I can only find solutions that use ssh on Google
I’ve done it with vnc before but it would be easier to just plug it into any laptop
No, the hdmi port will not take the pi's display as input, it'll be output only. The closest you're going to get is setting up the pi to be capable of being a remote desktop and logging in on your pc over the network using something like you have before--vnc. Now you can connect an ethernet cable between the laptop and the pi to have a faster connection, but vnc is still going to be one of the few ways you can use the laptop as a monitor
Something roughly like this: https://www.instructables.com/Set-Up-Raspberry-Pi-4-Through-Laptoppc-Using-Ether/
Ok Thanks
i tried installing machine with pip install machine but it gave me an error saying failed building wheel for pycrypto
Thank you so muchh!! Will refer all of these😊
This would be from a range of no more than several feet. I was able to set up a RPI Zero W as a gadget with a socket connection to listen and pass commands to a small script to act as a HID usb controller for the mouse, but it's sort of a janky process that doesn't allow for concurrent keypresses or held keys, and no mouse control. It's a start for sure, but I was wondering if there was something out there I could use as a framework, or if there was a better way (direct radio/bluetooth broadcast to a USB receiver perhaps?)
HID is the way to go, https://learn.adafruit.com/customizing-usb-devices-in-circuitpython
That should help outline the protocol more
that is so COOL!
Can somebody help me understand how the tuya or anyother smart device is get discovered by it's specific smartphone application? When we turn on Bluetooth or WiFi we don't see the smart iot Device there but the device/product application does discover it, Just help me understand the theory at least
hmmm - is there a way to intercept data traffick between the 2 devices ?
SourceForge
Download Wireshark for free. We no longer host here. Please use https://www.wireshark.org. Official releases can be found at https://www.wireshark.org/
Wireshark is a powerful network protocol analyzer developed by an international team of networking experts. It runs on UNIX, OS X and Windows.
how do you intercept radio traffick
????
pfSense is a firewall/router computer software distribution based on FreeBSD. The open source pfSense Community Edition (CE) and pfSense Plus is installed on a physical computer or a virtual machine to make a dedicated firewall/router for a network. It can be configured and upgraded through a web-based interface, and requires no knowledge of the...
can this show real data - then kinda ' reverse engineer
????
@hallow igloo Could be using NFC instead of BT/Wifi
ok, my micropython code is somehow exiting a while loop before the condition is met...
LOL, no They don't use NFC for that, also i am not specifically asking about Tuya products, I am asking in general How IoT devices get's the wifi Credentials from the phone app and then After successfully connecting to the Network, How they let the app know that they are connected
its a firmware they wrote for the board
you litterally have to use two boards to program using tuya
Nice, Pretty smart people are around here in this server
yup
you have to have a esp-based chip running tuya firmware, and then any other arduino controlling everything else using their i2c library to talk to the esp chip.
the ESP chip manages the wifi smart connections, and the tuya server, then relays instructions to the arduino controlling the rest.
Did i asked how to Build that?
I wanted to hook a door lock to tuya services, and I couldnt cause I dont have space for two arduino's in the lock.
no, but it was interesting info
😆
so if you ever do want to connect a python project to tuya, you can! 😁
Hey @pure osprey!
Uh-oh! It looks like your message got zapped by our spam filter. We currently don't allow .txt attachments, so here are some tips to help you travel safely:
• If you attempted to send a message longer than 2000 characters, try shortening your message to fit within the character limit or use a pasting service (see below)
• If you tried to show someone your code, you can use codeblocks
(run !code-blocks in #bot-commands for more information) or use a pasting service like:
dag nabbit
there is my code. The while loop in lock() keeps exiting the loop after 2-5 iterations, not completing the lock function properly.
idk why
the analogToPin class could be the issue, IDK either.
can someone help please?
seems to be hardware...
I put an LED command instead of a motor, and it worked just fine.
idk what is wrong. I've tried several hardware configurations, even different pins. Still no change. Turns clockwise just fine, will not work counter-clockwise
Ok, how do I do PWM in micropython?
I see the set duty cycle, frequency, etc. But how do i turn it on and off? Does setting a frequency just automatically turn it on?
Hello, one question please.
I am doing a robot, and i want to do 2 threads one to get analysis from sensors (camera), and another to communicate with an Arduino (with variables obtained from the analysis part), to move motors etc..
The idea is that the analysis thread is always on, so the robot always gets info from the environment, and the communication sends information only when this variables get some value.
I read about semaphores, but I am not sure if this is the right way to do this. So my question is what is the best way to do this, and are threads necessary, instead of just calling a function for sending communication.
Thanks a lot in advance.
hi how do i configure 3 flow sensors and 3 temperature sensors to my raspberry pi and gather data at 3 different locations
any tutorials or help guides please thank you.
I tried looping through the data i recieve but i don't get any output and it is a blank on the monitor
If

This is my code but idk where i am going wrong
Hello,i tried the code but i think i am messing up in a lot of places, could you please guide me again
I tried sending the distance values and the nodemcu reads each character at a time, I'm confused about how i should send the integer value as a whole
Before that i tried putting the entire data stream in am array and printing it,the monitor again shows garbage values
ok, can someone help me with this?
I am setting a variable in the script as a global variable, and I run a function that is supposed to change the global variable, and it does in the variable (ex. if I print from the function) but the moment I check the variable within the python shell in thonny, it returns as the original value.
After someone who might be able to explain a little bit about how micropython works.
Initally, I'm curious to know where the base filesystem is stored on microcontrollers.
My esp32 with micropython is reporting 2Mb of FS space (os.statvfs).
Does the micropython image take up 2Mb and then create another 2Mb partition for scripts etc?
Does anyone know how to use Cython to deploy python code onto arm cortex M4 based controllers ?

I want to build compiled python based application on this development board Nucleo F429ZI
Have any one work with raspberry before and have issue with getmac
can I ask smt about rpi zero w?
need help with smt
how can I make it play sound off of my phone's speaker?
insted of a buletooh speaker?
anyone?
I would not expect a phone to act as a bt speaker. But maybe you can webserve a file for the phone to play.
Hello, m new here, so m planning to start my Arduino project does anyone of u know how to program an arduino with python?
I keep having this issue , i have tried pip3 install getmac and it still appear

how can i do that
can you help guide me wiht it pls
Where can i learn micropython
your questions are quite broad and can be interpreted quite widely so it's hard to help. But maybe you can python -m http.serve in a directory which contains playable audio files then access your pi zero from safari on ios / chrome on androlid
go to their website, download, install, run some tutorials?
Thank you
I know you can play with micropython on your laptop
without an actual microcontroller
Well i need it for the raspberry pi pico and esp8266
Are you looking to learn micropython or learn about the MCU?
then you can start playing with micropython on your laptop without the MCU if you wish
or, you can run the micropython REPL and play with the MCU live
What is REPL
have you tried typing python in the terminal then 2+2 followed by enter?
Yes
then you have used the regular python REP(read evaluate print loop)
micropython lets you run one on your MCU I think
sure if I can - just ask and then anyone in the channel can help
How can i make a GUI for my raspberry pi pico
what does that mean? what are your overall objective? MCUs don't usually run GUIs I think
what do you know? you could send messages to a server somewhere (internet, rpi), and have it show a webpage. Or send messages to a GUI running on a laptop
i am just get a speaker insted
its fine
I want to make a GUI that can fetch me data over wifi from my esp8266 live whenever i want to see
Home assistant
does anyone know how to use a dht 22 temp sensor to measure water temperature accurately, as far as i know its not water resistant
far fetched but anyone here ever implemented a PID on a microcontrollers/arduino etc before?
There's this library: https://playground.arduino.cc/Code/PIDLibrary/
It's pretty good overall
Depending on your setup, you could stick it in a plastic enclosure and seal with with silicon sealant. Another way around it is to have it near the water's surface, and just calculate the offset between it's sampled temperature and the water's temperature (you'd calibrate it with a thermometer you put in the water and get a few different readings to figure out the offset and delay in changes in temperature being read). It's not the best solution but if you're unable to get a different waterproof temp sensor it's a functional alternative
How do you plan on connecting everything? Is there a screen connected to the pico? if not, graphical might not be the kind of user interface you should go after/
Are you running the python code using 'sudo' first?
There's a chance your super user path isn't the same as your python3 sys.path, and as such it's not able to find the getmac file
https://micropython.org/stm32/ I think your best bet is to just opt for micropython and avoid the mess of forcing Cython to use the arm compiler
https://docs.micropython.org/en/latest/reference/filesystem.html
https://docs.micropython.org/en/latest/develop/optimizations.html
And
https://www.youtube.com/watch?v=baa5ILZTRkQ
Are probably some of the best places to start for understanding how the memory is managed with the devices. For circuit python, It's changed some and I'm not overly familiar with it, but it should give you a starting point
Not a bad suggestion. Thank you
Hello i have a Pico andi needed tp def a instance thst when triggered an LED would flash on and off repeatedly until a button would be pressed to stop it. Can somebody give me an example all I can find is a button to turn on and LED then off
thank you
Yes im using a display for printing the data i will get
Hi everyone, how can i run it .ino files with opencv together. I want to make that when camera detect my face then led is on.
what ide are you guys recomaanding for raspberry pi smart house
In that case, the gui is going to be somewhat limited to what the screen can do, it's size, color display, etc. You can play around with some helper libraries, like https://circuitpython.readthedocs.io/en/latest/shared-bindings/displayio/index.html which should get you started
How do you want the two files to interact? Are you trying to run opencv on an arduino board? It probably won't fit unless it's a larger aduino. But if the arduino file is communicating with a computer running opencv it's much easier
This is probably the most popular place to start: https://www.home-assistant.io/installation/raspberrypi
If you're still having trouble, it might be because of the way python manages local and global variables
https://stackoverflow.com/a/423596/2469609
https://learn.adafruit.com/arduino-to-circuitpython/variables-types-scope
https://docs.python.org/3/faq/programming.html#what-are-the-rules-for-local-and-global-variables-in-python
These should help explain the characterization
Would you be able to post your current code and explain what's going wrong this time? And show an example of what 'garbage' is in this case?
I fixed it like a week ago. Thanks though!
Awesome! Nice job getting it working!
Something happened to it though. I don't know what. It seems to have reset itself, possibly corrupted the code. Haven't checked though.
I'll check it later tonight. It hasn't been working for the past few days.
Are you using circuit or micro python, and what board are you using? If the issue keeps happening, it might be worth resetting the flash. (But that's just a 'in case it keeps happening' thing, not a do it immediately thing)
Good to know. If the problem persists I'd suggest following the guide for https://docs.micropython.org/en/latest/esp8266/tutorial/intro.html using esptool
i'm just curious but is there a microcontroller that takes python
I used uPython on ESP8266
Yes--though strictly speaking the it's not python, but an implementation of python that is very similar. (so it isn't a microcontroller running pyton 3.10)
https://micropython.org/
https://forum.micropython.org/viewforum.php?f=10
https://circuitpython.org/downloads
are some boards which run micropython and circuitpython
thats a mind warping idea - hmmm
can i get help for individually programmable LED language?
this is for python but on the raspberry pi
whats the best way to send data from pi to django backend. I want to send the text from detected license plate using pi camera to my database
How can i interface my arduino with my python tkinker gui
Or how can i command my arduino through python tkinker
How can i communate with arduino file and python file?
Can someone explain to me what is the voltage of a microcontroller Motherboard so i can know what battery to use?
sure SL Puppet do you have the model and make of the microcontroller?
micropython jupyter
hello
these are my codes
#include<SoftwareSerial.h>
#include <ESP8266WiFi.h>
#include<ThingSpeak.h>
SoftwareSerial SUART (4); //conneted to D2
WiFiClient client;
long mychannelnumber=1530225;
const char myapi[]="4L7SRAWG2XTU1UT4";
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
WiFi.mode(WIFI_STA);
ThingSpeak.begin(client);
WiFi.begin("****","****");
// while(WiFi.status()!=WL_CONNECTED)
// {
// Serial.print("...");
// delay(200);
//}
//Serial.println();
//Serial.println("NodeMCU is connected");
SUART.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
//String msg = mySerial.readStringUntil('\r');
//Serial.println(msg);115200
//byte n = mySerial.available();
while (SUART.available())
{
float x = SUART.read();
Serial.println(char (x));
delay(1000);
ThingSpeak.writeField(mychannelnumber,1,x,myapi);
//if (httpCode==200)
//{
//Serial.println("Channel print successful.");
//}
// else
//{
//Serial.println("Problem writing to channel. HTTP error code"+String(httpCode));
//}
//delay(2000);
}
//else
//{
//Serial.println("error");
//delay(100);
//}
}
@errant wigeon i am really confused about how i should send ultrasonic distance and servo angle to the cloud
I am able to send the values of one variable to one field, but when i send the values of both the variables to two separate fields on thingspeak i dont get any output on the 2nd field
the problem is,i can't understand how to send 2 variables from the arduino i.e the expected distance and actual distance
#include<SoftwareSerial.h>
#include <Servo.h>
int trigPin=9;
int echoPin=10;
int servoControlPin=5;
float pingTime;
float targetDistance;
float speedOfSound=0.034;
float p=0.0; //Variable for the value we want to set servo to.
float n;
Servo myPointer;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(servoControlPin, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
myPointer.attach(servoControlPin); //Tell arduino where the servo is attached.
}
void loop() {
// put your main code here, to run repeatedly:
for(p=30;p<=120;p++)
{
myPointer.write(p);
delay(10000);
ultrasonic();
n=((p-30)/6.20)+3;
//Serial.print("The distance should be:");
// Serial.print(n);
p=p+29;
}
}
void ultrasonic()
{
digitalWrite(trigPin, LOW); //Set trigger pin low
delayMicroseconds(2000); //Let signal settle
digitalWrite(trigPin, HIGH); //Set trigPin high
delayMicroseconds(15); //Delay in high state
digitalWrite(trigPin, LOW); //ping has now been sent
delayMicroseconds(10); //Delay in low state
pingTime = pulseIn(echoPin, HIGH);
targetDistance= speedOfSound * pingTime;
targetDistance=targetDistance/2;
// Serial.print("The Distance to Target is: ");
Serial.print(targetDistance);
//Serial.println(" cms");
delay(1000);
//Serial.print("The servo angle is: ");
// Serial.println(p);
delay(1000);
}
Hello, how can i convert it to json?
!d json
Source code: Lib/json/__init__.py
JSON (JavaScript Object Notation), specified by RFC 7159 (which obsoletes RFC 4627) and by ECMA-404, is a lightweight data interchange format inspired by JavaScript object literal syntax (although it is not a strict subset of JavaScript 1 ).
json exposes an API familiar to users of the standard library marshal and pickle modules.
Encoding basic Python object hierarchies:
Does anyone here recommend a RF module for long distance drones?
I use micropython on esp32
I am trying to get 2 raspberrypis to communicate with each other over a tcp connection while also monitoring the GPIO pins.
The goal would be for me to be able to press a button on one pi and for an led on the other to light-up and vise versa.
I have been searching for a couple hours and I think to achieve this I will have to use asynchronous python in some manner however I am unsure where to start and I don't particularly want to spend ages learning async
@tired ocean as far as I remember the raspi supports remote GPIO via https://gpiozero.readthedocs.io/en/stable/remote_gpio.html
Does anyone know how to use robot studio?

Thank you, I will take a look