#tinyusb
1 messages · Page 18 of 1
Operating System
Others
Board
raspberry pi pico (rp2040)
Firmware
examples/host/cdc_msc_hid commit cadfcd153e8fce804f38f0e19997c13bf6931a49
What happened ?
The hub appears to recognize the keyboard is attached, does a hub port clear feature reset change, and then fails to complete a transfer to get 8 bytes of the Dev. Descriptor. Unplug of keyboard is not recognized after that. If I unplug the hub, the code recognizes that and enumerates the hub again on plug in.
@hat...
is this a known issue?
yeah, since I never tried to get hub work with rp2040, there is no wonder if it doesn't work. But hub calss works with other mcu, it is just a matter of porting. Thank you for the issue, though could you put the log into attached txt for readibility.
Is there any interest in implementing the isochronous mode in this driver?
Yeah, there is the interest but just not enough time and people to implement it.
I have a couple of CH55x, I would try to add support for it if I could manage the time to do so. I don't even know/have ch32v307, so the short answer is No.
thank you for the PR, it looks good though the application need to be platform independent to run all other MCUs. portenta use h7, which ideally should be put under https://github.com/hathach/tinyusb/tree/master/hw/bsp/stm32h7 . Since you are not familiar with tinyusb bsp build system, I could help updating this PR if you are willing to test it out ( I don't have any portenta to test with).
is it really needed, the start up/system init would probably does this for us. I will look closer at this if you are willing to test out my update.
these mcu dependency cannot be included in the application which is meant to run on all mcus. You could move the VTOR set into the board init.
@PanRe @geekbozu @vmilea thank you for more update, I am testing it out real soon, have some issue with Tracefmt last time (resolved now) and have to do lots of house cleaning lately.
Avoids a linker conflict if programs are using that same function name.
Otherwise building a samd21 fork of apollo we get
/usr/lib/gcc/arm-none-eabi/9.2.1/../../../arm-none-eabi/bin/ld: _build/qtpy/obj/../../firmware/src/boards/qtpy/uart.o (symbol from plugin): in function `uart_configure_pinmux':
(.text+0x0): multiple definition of `uart_init'; _build/qtpy/obj/hw/bsp/samd21/family.o (symbol from plugin):(.text+0x0): first defined her...Sorry. Should have attached the log as a file. I am investigating the issue
pico-hub-kb.log
.
[hathach/tinyusb] New branch created: add\-s3\-devkitm
Sorry. Should have attached the log as a file. I am investigating the issue pico-hub-kb.log .
no problems at all, I just update the 1st post to make it easier to read. Thanks for looking into the issue, I will try to test/troubleshoot this out later on as well.
Here is a log file for attaching a Dell USB mouse. The same hub enumeration log as previous issue, so only shows after mouse attachment detected. The enumeration gets further along, but the pico receives stall status when it attempts to set the mouse device address
pico-hub-mouse.log
.
Describe the PR
Add s3 devkitm & devkitc
surprised to see someone porting these MCUs, I use them at work for some legacy projects, annoying little things
I assume you're working with FTDI/Bridgetek, so i'll ask you if you don't mind.
Afaik there is no toolchain for linux, I tried to compile gcc for it and had some luck, but the images were larger than expected, and they showed some erroneous behaviours.
Are the compilation options used by the original toolchain available somewhere? I can only assume that's what cause the differences.
Correct, we don't currently have linux tools available. The FT9xx Toolchain has the Windows gcc compiler (prefix ft32-elf-).
given that gcc is open source, and the ft32 architecture seems to be upstream, could you provide the build options that are used to compile the windows version of the toolchain?
Describe the PR
This PR implements the board definition for the ST nucleo f439zi development board.
I tested the uac2_headset and cdc_msc examples and both worked as they should. The uart config also works since I got an assert error with cdc_dual_ports (not enough endpoints, 5 needed, 4 available).
Limitations:
- The USB HS peripheral is not implemented. So only OTG_FS can be used. Nucleo boards have only one downstream USB port connected to OTG_FS.
- The host mode power switch pi...
look great, thank you for your PR. Will merge when ci passed.
- The USB HS peripheral is not implemented. So only OTG_FS can be used. Nucleo boards have only one downstream USB port connected to OTG_FS.
OTG HS required external PHY, which is not available on nucleo platform. So it is the board limitation not your PR. HS work on other boards like f723 or h743.
- The host mode power switch pin doesn't seem to be defined/initialized anywhere. This is also the case for the f412zg nucleo board definition, so I suspect this isn't working there as we...
Oops. Made a typo in 6de423606fc9d512efb830b198c76f095a182a1c. Sorry about that.
This code is not perfect but it is far enough along that I believe it is ready for review. It handles concurrent MIDI send and receive. Whether the API I came up with is good for any host other than the RP2040 should be considered. I have tested it with the following MIDI devices:
- Casio PS-X3000
- Yamaha reface CS
- Korg nanoKONTROL2
- Korg nanoKONTROL Studio
- Arturia Keylab 88 Essential
Operating System
Windows 10
Board
pca10056, fomu,
Firmware
examples/device/cdc_msc
or any other device build
What happened ?
Build fails when optimization is changed from -Os to -O2.
In several places get_driver() (which can return NULL) is used without checking for NULL dereference.
It could be that it is false positive but maybe not.
I'm using other compiler (xc32-gcc for microchip) that allows to have -Os only in PRO version (not free) so I'm stuck wit...
@kkitayam the diagram is super useful, though I haven't tried to look closely at musb so far. Please give me a bit of time to catch up with this.
Hi hathach,
Just a friendly reminder on this issue. Could you please take some time to figure this out? This has been a blocking bug for me for a while. BTW, have you received your Tiny200 board?
Thanks!
@t123yh thanks for the reminder, I did indeed receive tiny200 board a few days ago. I have been busy with other works. Please give me a bit more time to get it setup and trying this out.
Describe the PR
Mynewt build fails when xc32 compiler is used.
definition of DEBUG breaks Microchip pic32 builds for Mynewt.
When MCU is not VALENTYUSB_EPTRI there is no need to have any
preprocessor definitions.
It may not look like a big deal but for xc32 builds, compiler
automatically force-includes some file that have structure with field name
DEBUG that result in build error in dcd_eptri.c when this file
is not really needed.
Moving DEBUG and LOG_USB few lines down shoul...
Describe the PR
Three changes are needed to accommodate xc32 compiler build:
- optimized build flag other than -Os
added CFLAGS_OPTIMIZED that defaults to-Osbut can be overridden in boards - build without
-lnosys
added LIBS_GCC with default libraries that can be changed in boards - build without LD_FILE specification
if LD_FILE is empty-Wl,-Toptions is not added to LDFLAGS
Additional context
xc32 compiler for Microchip mips chips i...
Describe the PR
Add a HCD driver for Renesas RX
Additional context
I have checked cdc_msc_hid works on Renesas RX65N Target Board. It is tested with a low speed mouse and a Raspberry Pi Pico running as Mass Storage. If you check the example works on the board, short-circuit between JP1-3 and VBUS to supply 5V power.
Becaus...
amazing, thank you again for another PR. I will check it out as soon as I could.
@rppicomidi many thanks, I have revised hcd for rp2040 recently and also have some ideas on how to implement the bulk endpoints. Basically it is similar to your changes, we add an struct for each bulk ep and process them one by one after the previous one is complete. I will check this out asap I could. sorry for late response, I am still catching up with PRs
It is definitely Windows UAC2 driver issue, despite of fullspeed detection, it still mis-interprets as highspeed endpoint
[USBAudio2]VID=0xcafe PID=0x4010 REV=0x0100
[USBAudio2]UsbSpeed = 2 FullSpeed
[USBAudio2]language ID = 0x0409
[USBAudio2]Product='TinyUSB speaker'
[USBAudio2] AS OUT IfNb=0x01 AltSetting=0x01 '<NULL>'
[USBAudio2] Format Type I PCM (0x00000001) SubSlotSize=2 BitsPerSample=16 ChannelCount=2
[USBAudio2] Data Endpoint 0x08 Isochronous Asynchronous Data...@hathach No need to say you are sorry. Thank you for running this project. I understand you are busy.
I agree with @PanRe that @geekbozu walkaround is a better solution since it is more portable and allow device to work with both windows and Linux/macOS. @geekbozu do you have time to make an PR to get this upstream. We could add an comment note to remind us that we could remove or off it out when later windows update e.g win11 fix this issue etc..
I should be able to find some time in the next week or so. I need to think of how I would want to bake this into the driver properly. If at at all.
I actually wonder if just extending tud_audio_fb_set to take a parameter on which format to convert to. Or adding a function that does no conversion and letting the user handle it is the better choice, With documentation of course
Thoughts?
So So sorry I became incredibly sick, But Im mostly back at it now! Thank you guys so much! This project has the best community! Ok So I made sum mistakes, I didnt know any and all git pushes I would do would immediately be added to PR so Things I didnt intend to make it hear did, Im fairly embarrassed. So the vector offset I will hafta try and see if it works without it being specifically listed under main. I currently have several stm32s with boot loaders that all seem to require different ...
Ok so adding -DAPP_START=0x08040000 to the cflags with .ld set to offset didnt work and also cflags set and ldflags set with -Wl,-Ttext=0x08040000 and .ld set to flash base, but all fail, the leds turn on correct and it fails to enumerate. Im sure a simple way to add the offset to the board/family files exists but I just havent found it yet:) Ill keep on it!
I should be able to find some time in the next week or so. I need to think of how I would want to bake this into the driver properly. If at at all.
That would be great
I actually wonder if just extending tud_audio_fb_set to take a parameter on which format to convert to. Or adding a function that does no conversion and letting the user handle it is the better choice, With documentation of course Thoughts?
It is also a good approach as well, I think we should also take this chance...
PR looks great, thank you very much for your effort. I only have one question regarding the keil warning suppression of "statement is unreachable"
[hathach/tinyusb] New review comment on pull request #1220: Add support for Allwinner F1C100s family
I don't have keil to try this out. Maybe it catches an actual valid warnings that worth fixing. Would you tell more on this, which specific line that this
[hathach/tinyusb] New review comment on pull request #1220: Add support for Allwinner F1C100s family
The warnings are for the switch(desc_type) inside process_get_descriptor in which there're several break; that is unreachable because are return statements in both if and else block. Line 1016, 1033, 1059, 1072, 1086.
[hathach/tinyusb] New review comment on pull request #1220: Add support for Allwinner F1C100s family
thank you I see, we could just remove the break; they are mostly are there for case/break pair.
I have tried it on my tiny200, and it works great. Thank you very much for the excellent PR. I did a bit of cosmetic change e.g adding license term to dcd file, move hw/mcu/allwinner to its own submodule etc.. Once the ci is passed, we could merge this
look great to me, IMO, it is the better way regardless of the pic32 compiler
Hi @hathach ,
Thank you for testing. The bug mentioned above still exists, and I believe it needs to be resolved before merging. I have an example to reproduce this issue. I'll upload it to a branch soon.
@t123yh no problem at all, I am downloading keil trial version on my VM windows, will try it out if you have any ready-to-build example
@t123yh no problem at all, I am downloading keil trial version on my VM windows, will try it out if you have any ready-to-build example
No you don't have to download keil. You can run my example totally within the tinyusb example framework. The code to reproduce the problem is based on gud-pico which is part of the gud project. You need to have RPi with the latest RPi OS (which backported gud to 5.10 kernel) or PC with ...
@hathach The example is ready. You can downloaded it from gud-test branch. This is a dirty quick version based on earlier version of my port, but this shouldn't matter. It has my workaround commit for the problem discussed above with kkitayam applied. You have to prepare a Linux host running kernel with [gud kernel module](https://github.c...
Thank you for the detail info, I will grab an Pi4 and try to reproduce and look into this issue. To be honest, I haven't read the musb specs/code yet, thankfully, kkitayam already does an great job illustrated it.
musb doc can be found by Google mentor usb sunxi.
yeah, I mean I haven't got time to really look at musb yet. So far all the great work is done by @kkitayam :)
In order to implement this, we'd also want to implement DMA in order to support the higher data rates. To perform DMA, we'd want some sort of abstraction layer in the case that DMA is used in other parts of the application code. Also, DMA will be slightly different on the various variants of the STM32, so I'd expect adding DMA support would be a large undertaking.
If you don't think that DMA is necessary, this could be done without too much effort, though I personally don't need ISO endp...
To perform DMA, we'd want some sort of abstraction layer in the case that DMA is used in other parts of the application code.
That's something I'm also want to be implemented.
But I don't think stm32_fsdev has DMA support ?
Sorry for the late reply. I am not sure if it is a good idea to make the feedback function so flexible:
- First of all, this sould not be a concern of the user as the value format was defined within the USB specs, so nobody would expect to set it on its own. The reason we would like to do that now is because we need a patch for Windows driver bug
- There is no chance the driver knows if a corretly working Linux driver or a buggy Windows driver is hosting the audio driver. Hence, the flexi...
I think tud_audio_n_feedback_set(func_id, fb, format) sounds reasonable.
But to clarify a couple things about original proposal https://github.com/vmilea/tinyusb/commit/ef879e8a8a43dfa34160f50d7f432c3140dec7fa:
- It doesn't require changing the API.
- With
CFG_TUD_AUDIO_DISABLE_FEEDBACK_FORMAT_CORRECTION=1, we let the user handle the format. So they can change format at runtime like in @geekbozu's hack. In my opinion this kind of hack is better left do the user than integrating int...
Regarding cross-platform: Fixed 16.16 format is currently viable on Windows (10 / 11) and Linux (ALSA driver detects if the values is out of bounds and switches to the other format automatically). Unfortunately I don't have a Mac to check there as well.
There is no chance the driver knows if a corretly working Linux driver or a buggy Windows driver is hosting the audio driver. Hence, the flexibility is not of use
I originally thought so as well, but as @geekbozu showed we may guess: if the incoming data rate doesn't correlate with feedback rate, than likely the feedback format is wrong.
@vmilea Well, i would strongly vote for not letting the user (i mean the poor developer) handle this case. IMHO the tinyUSB driver should take care of this matter. This saves the users a lot of time and us a lot of bug reports.
Nevertheless, the ALSA driver you mentioned kept me thinking. Against the specifications they check and allow different formats too. I guess to robustify their driver against other UAC drivers which also do not respect the specs. Maybe we should do that too? Since n...
I guess to robustify their driver against other UAC drivers which also do not respect the specs. Maybe we should do that too?
Supporting both formats on host driver is trivial (shift feedback value by 2 if it's closer to the nominal rate).
On the other side, the client driver can't detect format mismatch directly. So tinyusb would just guesstimate after a number of frames based on data rate. In my experience, these heuristics are tricky to implement and tend to fail in surprising way...
@hathach Have you reported the Windows driver bug? I think there was a Feedback Hub app for that. If not, I'll do it once I'm back from vacation.
Thank you @PanRe and @vmilea for the feedback
Regarding cross-platform: Fixed 16.16 format is currently viable on Windows (10 / 11) and Linux (ALSA driver detects if the feedback rate is out of bounds and switches to the other format automatically). Unfortunately I don't have a Mac to check there as well.
I did a quick check with CFG_TUD_AUDIO_DISABLE_FEEDBACK_FORMAT_CORRECTION=1 on an macOS Big Sur and it works well.
Have you reported the Windows driver bug? I think there was...
Sorry for the late reply. I am not sure if it is a good idea to make the feedback function so flexible:
- First of all, this should not be a concern of the user as the value format was defined within the USB specs, so nobody would expect to set it on its own. The reason we would like to do that now is because we need a patch for Windows driver bug
- There is no chance the driver knows if a correctly working Linux driver or a buggy Windows driver is hosting the audio driver. Hence,...
@hathach Thanks for the additional testing. I agree, in practice 16.16 is a better default.
Let em start with I am all for this. I think its a saner default.
However,
#1235 Documentation is not accurate,
The issue is the windows driver is assuming the format based on the bcdDevice field.
if bcdDevice = 0x01XX aka a 1.0 device windows assumes a 10.14 format.
if bcdDevice = 0x02XX aka a 2.0 Device makes windows expect 16.16.
All of our examples default to a usb2.0 device even though we are full speed.
If linux/mac support FullSpeed USB 2.0 16.16 out of the box. I agree...
if bcdDevice = 0x01XX aka a 1.0 device windows assumes a 10.14 format.
if bcdDevice = 0x02XX aka a 2.0 Device makes windows expect 16.16.
All of our examples default to a usb2.0 device even though we are full speed.
Yeah, you are right. Since UAC 2.0 (2006) came after USB 2.0 (2000), it is absolutely normal to have fullspeed only to have bcd = 2.0. Since the new default does not correct format, application could just pass 10.14 when using with bcd = 1.1. We surely need to updat...
So do we want to make a separate PR to allow modifications at runtime to the Feedback value? Or is getting the documentation updated in #1235 enough for everyone?
So do we want to make a separate PR to allow modifications at runtime to the Feedback value? Or is getting the documentation updated in #1235 enough for everyone?
your format mismatched detection snippet is awesome, I think we should also put it into the example with explanation (either enabled or commented out). If possible, it is probably better to be a separated PR after #1235.
@PanRe do you think having 16.16 as default is reasonable. If yes, we will wrap up #1235 . Of course, thi...
Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Describe the PR
Driver for Microchip PIC32MZ (mips architecture) High Speed USB.
CDC/MSC/HID/UAC2 tested with repository examples.
DFU/CDC/HID tested also with Mynewt system.
Additional context
For now driver only supports device role (even though chip has OTG support).
xc32 compiler from Microchip is needed to build with this driver (3.01 or 2.50 (with some unknown command line options removed)).
To build non-debug version -Wnull-dereference has to be remov...
What needs to be done in order to migrate/upgrade this? I want to communicate with a ft232r with the rp2040's USB.
I want to try to contribute, but I have no idea what the needed changes are.
@hathach yes I think 16.16. as default is the most elegant approach! Thx for testing it on Mac! :)Happy new year everybody btw! ;)
So do we want to make a separate PR to allow modifications at runtime to the Feedback value? Or is getting the documentation updated in #1235 enough for everyone?
your format mismatched detection snippet is awesome, I think we should also put it into the example with explanation (either enabled or commented out). If possible, it is probably better to be a separated PR after #1235.
@PanRe do you think having 16.16 as default is reasonable. If yes, we will wrap up #1235 . Of c...
This header can be removed because it's not actually being used and prevents the code from being compiled using standard mipsel-gcc.
Superb! thank you very much another excellent PR. Except for the minor OPT_MCU, I have an couple of questions:
- Could we update PR to have ci to build with xc32 or maybe pic gcc (if there is one). I am new to PIC32 compiler.
- PIC32MZ seems to use musb IP controller, which is similar to TI MCU https://github.com/hathach/tinyusb/blob/master/src/portable/mentor/musb/dcd_musb.c and allwinner F1c100s #1200 . Just want to ask whether you take a look at those implementation. That said, it is ab...
I think we should treat PIC32 as a new line of MCUs. Although it is all under microchip, but it is different from SAM.They may sell it it in the future :)
Superb! thank you very much another excellent PR. Except for the minor OPT_MCU, I have an couple of questions:
- Could we update PR to have ci to build with xc32 or maybe pic gcc (if there is one). I am new to PIC32 compiler.
- PIC32MZ seems to use musb IP controller, which is similar to TI MCU https://github.com/hathach/tinyusb/blob/master/src/portable/mentor/musb/dcd_musb.c and allwinner F1c100s #1200 . Just want to ask whether you take a look at those implementation. That said,...
FYI I opened a feedback request on the hub a when this started for the Windows driver. But no traction yet
https://aka.ms/AAeugzn
I'm in progress of trying out dcd_musb.c as indeed same IP is used.
Microchip has slightly different register/field names used in their headers but it all looks same.
dcd_musb.c has some ARM related stuff like NVIC and some CMSIS macros but not too much and that can be solved.
I will stick for now to xc32 compiler for it provides headers and linker scripts for PIC32 chips and there is no need to borrow/fabricate headers and put it in TinyUSB repository.
I will post progress here.
it should be linked to https://github.com/RT-Thread/rt-thread, though why would you close the PR ?
there is a problem on my side. when i fix that, i will re create a pr.
These are different Broadcom chips. The peripherals are essentially
the same. The main differences are:
- The CPU(s)
- The interrupt controller
- The peripheral base address (but not the peripherals that we use)
Superb! the skip.txt is great idea. Every thing look perfect, thank you very much
Describe the PR
Breakpoints are useful while debugging the tinyusb. TU_ASSERT uses TU_BREAKPOINT which is now effective on LPC55S28.
FYI I opened a feedback request on the hub a when this started for the Windows driver.
Thanks, I've upvoted and added a few details.
@hathach I've updated #1235 as suggested. Can we merge it?
("Build ESP" is failing, seems like a CI issue rather than something wrong in PR).
Latest changes:
OPT_MCU_PIC32MZ change to let a little space for more ARM-based MCUs from Microchip (SAM)
Some register manipulation moved to board setup just to make transition to common code easier in the future.
It would be possible to use code dcd_musb.c if file with USB0_Type and all bit field definition were available.
Changes needed to make it work require also NVIC related code removed.
PIC32 also works with high speed and dcd_musb.c assumes for now full speed which also co...
I've been playing around with this code, and have run into some issues with customizing it for my application. First of all, I'm unable to change the frame rate at all. Anything other than 10 (higher OR lower) causes Windows to no longer recognize it as a connected video device. Also, I'm trying to increase the resolution, and have hit a few walls there. I know that there are going to be limits wrt frame buffer size, due to RAM and time constraints, but I thought I'd post my findings here...
Operating System
Windows 11
Board
Original Raspberry Pico Board
Firmware
Micropython Build, current master (see e.g. https://micropython.org/download/rp2-pico/)
Host operating system is independanpt (can be windows based or linux / mac)
What happened ?
Pretty detailed here:
https://github.com/micropython/micropython/issues/7996
but to summarize it, the USB endpoint does not ACK anymore when after it has received one character.
(see also https://github.com/m...
Hi, I'm very interested in testing this out. Can you share how you have your Pico / RP2040 board hooked up? How are you seeing the printf() messages?
@qwertymodo Thank you for your comments!
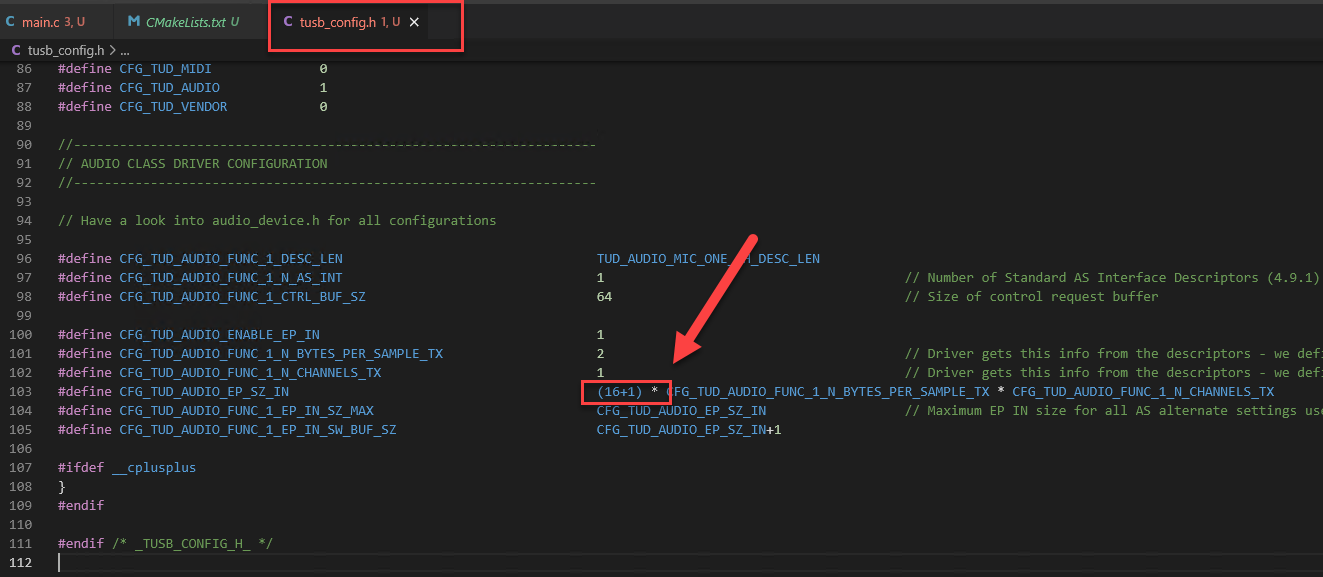
I'm able to make it work if I also increase CFG_TUD_VIDEO_STREAMING_EP_BUFSIZE in tusb_config.h, which seems to max out at 1023 (if I set it to 1024 or anything higher, Windows no longer sees the video device).
It is a limitation of the USB Full-Speed specification. Isochronous transfer of USB-FS up to 1023 bytes. Please find attached picture for USB 2.0 spec. Raspberry PI Pico supports only USB-FS in my understanding.
 has its own reference counting for
HFXO oscillator.
So far TinyUSB requested HFXO when VBUS was detected and stopped when
VBUS was removed.
But with Mynewt running HFXO can be stopped when other interested parties
don't require HFXO anymore. This results in very difficult to track
USB transmission errors when internal RC is used for USB clock source.
This change enables Mynewt specific HFXO management in Soft Device fashion.
...
Any ideas why I'm unable to change the framerate at all? Even lowering it to e.g. 8fps causes Windows to no longer recognize it as a video device.
I had tested with 10FPS and 5FPS. If you change to 5FPS instead of 8FPS, it works with Windows.
I have reproduced that video_capture example fails enumeration process with #define FRAME_RATE 8 in usb_descriptor.h
And USB Device Tree Viewer shows warning messages below.
*!*WARN...I've done some initial testing on this PR, using @rppicomidi's repo's midihost branch as of 537150f931d218e16b88dc5ac50a625622812c2b. My test setup is the standard Pico-as-picoprobe to Pico arrangement, with the Pico's VBUSs connected together and a USB OTG adapter to provide a USB-A socket.
The Pico MIDI host is running the examples/host/midi/src/midi_app.c with LOG=1 but with test_tx() commented out to just test MIDI receive.
USB MIDI devices tested were:
- Arturia Keyst...
dwMinFrameInterval and dwFrameIntervalStep are calculated by
10000000/_fps. 10000000 is not evenly divisible by 8. Then the warning message occurs. So, in currentvideo_captureimplementation, FRAME_RATE must be a divisor of 10000000. Of course, I think it is better to be able to specify any FPS. I will attempt to fix it later.
10000000 / 8 = 1250000, so it's not that, but from that warning it's probably something in the interaction between dwMaxFrameInterval, dwMinFrameInterval, and...
Ok, I think I might have found the solution, but as I said, it's been awhile since I've read through the docs, so this is just a "seems to work" fix, without really being sure it's correct. I think the only change that needs to happen is that dwFrameIntervalStep needs to include the _fps factor. Changing this
to
`(10000000/_fps), (10000000/_fps),...
@hathach I pushed some bug fixes. Somehow I broke a lot of the builds for processors I do not have access to. Any idea how I can fix it? Do I need to merge with the latest tinyusb?
@todbot I pushed an example project that uses the midihost code called (midi2usbhost)[https://github.com/rppicomidi/midi2usbhost] sends MIDI from the USB host to the Pico's UART1 TX pin and takes UART1 RX pin MIDI data and sends it back to the USB host. There are detailed instructions and pictures.
Is your feature request related to a problem? Please describe.
There's a HID_DESC_TYPE_PHYSICAL but hidd_control_xfer_cb ignores that case instead of calling a tud_hid_descriptor_physical_cb.
Describe the solution you'd like
For physical descriptors to be supported.
@qwertymodo Thank you for the solution! I have confirmed the issue is fixed.
I will create a PR for your solution with minor modification. It is shown below. I had confirmed it works with 6FPS and 8FPS.
(10000000/_fps), (10000000/_fps), (10000000/_fps)*_fps, (10000000/_fps)), \
Describe the PR
If FRAME_RATE was changed to 8, enumeration process had been failed. FRAME_RATE is defined followings.
https://github.com/hathach/tinyusb/blob/3b09b82123a50bef6b18cf90c2734ae7581da4a3/examples/device/video_capture/src/usb_descriptors.h#L38
See also: https://github.com/hathach/tinyusb/pull/1118#issuecomment-1010401051
Additional context
I had confirmed this patch on Raspberry Pi Pico.
What's the point of the 3rd argument being divided by and then multiplied by _fps, doesn't that cancel out? Or does that achieve some kind of compile-time rounding?
Hi, this appears to have broken cmake builds for RP2040. hw/bsp/family_support.cmake needs updating to read these skip text files
I have a fix for this https://github.com/liamfraser/tinyusb/commit/b76a0bbf92c626f847be201062de1289b9736209 and will create a PR
Commit 7b27b8f498a185d8a7c1bea5dac8f43e7030ebd7 which swaps out the skip / only files for a text file did not include an update to the cmake builds. This PR fixes the issue.
The following line returns from the tu_fifo_write function when the fifo is full, leaving f->mutex_wr locked, I think we just need to release the mutex before returning false:
Describe the PR
When dcd_edpt_xfer() starts new transfer two separate problems were observed.
For both problems stream of OUT packets was pouring from host.
First problem was that total_len and actual_len were not atomic.
In case where incoming OUT packets are less (63) than MPS (64), actual_len and total_len
are set 63.
Then transfer complete from USBD is called that will schedule next 64 bytes transfer.
At that point incoming packet would start DMA if there is...
Describe the PR
In multi-thread mode starting DMA in thread mode was
prone to race condition resulting in infinite loop.
It may happen on single core CPU with strict priority based
tasks scheduler where ready high prio task never yields to
ready low prio task (Mynewt).
Sequence that failed (T1 - low priority task, T2 - high priority task)
- T1 called start_dma()
- T1 set _dcd.dma_running (DMA not started yet, context switch happens)
- T2 took CPU and saw that _dcd.dma_running i...
What's the point of the 3rd argument being divided by and then multiplied by _fps, doesn't that cancel out? Or does that achieve some kind of compile-time rounding?
Yes, the value of (10000000/_fps)*_fps will be truncated to an integer.
When _fps is an integer, (10000000/_fps) is evaluated an integer and the decimal part of the result is truncated. So, when _fps is not a divisor of 10000000, (10000000/_fps)*_fps will be an integer which is not equal to 10000000.
This PR is ready to review
It turns out that its not enough to handle races.
Another problem arise when two tasks are involved.
First blocks USB interrupt to set total_len and clear actual_len but between those two instructions
second task enters same function for other endpoint and while doing this enables interrupt again
while first task did not cleared actual_len yet and first problem shows up again.
To fix this:
- CPU critical section should block interrupts during
buffer,total_lenand `actual_le...
thank you very much, sorry for the late response. I make an quick update to get actual link speed. We are good to merge
#1235 is merged, I think we are good to close this. Thank you every one for joining the discussion and helping to resolve this.
Describe the PR
IDF changes API and macro naming with latest v5 version.
Thank you very much for another great PR. Sorry for late response. I have been busy with other paid works. I change the OPT_MCU_PIC32MZ to 1900 treating it as a separated ID. I would like to help with adding pic32mz to ci but didn't have any pic32mz board here yet. We could merge this as it is for now, and come back to this later on.
Thank you very much for another great PR. Sorry for late response. I have been busy with other paid works. I change the OPT_MCU_PIC32MZ to 1900 treating it as a separated ID. I would like to help with adding pic32mz to ci but didn't have any pic32mz board here yet. We could merge this as it is for now, and come back to this later on.
Great, thanks.
Describe the PR
Buttons for olimex_hmz144 and olimex_emz64 were incorrectly set to be active high.
Remote wakeup requires that RESUME bit be active for 10ms.
It was covered for OS build for non-OS build it is now handled by
utilizing board_millis() function.
Additional context
Changes needed for USB3V suite tests for remote wakeup functionality.
It was originally tested with Mynewt where remote wakeup was triggered
other way.
Test suite evidence run on cdc_msc and hid_composit examples.
USB3CV.zip
bsp and board_millis() are for example only. Please put a TODO or an blocking loop there instead.
tinyusb/src must be self-contained (except for external lib and os). The bsp is only for example, and is not available in external build. You could simply add TODO here, we will try another way for have a delay for no os later on. Something like this could work, but it is blocking, we could add an API for remote wakeup complete later on.
https://github.com/hathach/tinyusb/blob/master/src/portable/broadcom/synopsys/dcd_synopsys.c#L595
static void remote_wakeup_delay(void)
{
//...thank you, I pushed an update to correct link format in rst file. Will merge when ci passes
no problem at all, I am a bit busy as well.
I see you ask me to try your update, Im a lil confused do you mean you have a branch I should pull and try? Or try putting the offset in the init like you mentioned? So sorry I didnt understand, but yes I would love to test any updates
Thanks for your kind words and willingness to test it out, I haven't made any changes just yet. But will try to make some changes soon enough.
Ok so adding -DAPP_START=0x08040000 to the cflags with .ld set to offset didnt work and also cflags set and ldflags set with -Wl,-Ttext=0x08040000 and .ld set to flash base, but all fail, the leds turn on correct and it fails to enumerate. Im sure a simple way to add the offset to the board/family files exists but I just havent found it yet:) Ill keep on it!
Sorry for late response, I have been a bit busy lately with other works. I will try to make an update on linker stuff later on base...
I reckon that could be the bug that was causing this in my testing on the Espressif ESP32S2:
https://github.com/espressif/arduino-esp32/issues/5727#issuecomment-950043421
Problem for me was, they were not interested in checking and simply closed the issue, and they don't compile from source but instead supply a pre-built library, meaning I was never going to find the problem.
If that's the issue though, thank you! You're worth more than Espressif are, that's for sure!
sorry for late response. I don't have any ft90x board to verify the PR. We will merge this as it is and make any correct/update later on. If possible please add ft90x to ci build to prevent any future changes would break the build
Describe the PR
Includes were moved few lines down to restore build with Mynewt build system.
oops, sorry for should have been more careful with this
Allows bulk endpoints to use entries in ep_pool, and forces only control endpoints to share ep_pool[0].
THIS IS A HACK.
It's only tested to the extent that the MSC example gets as far as invoking inquiry_complete_cb().
This exercises an input & an output bulk endpoints.
Coexistence of interrupt & bulk EPs is entirely untested and is sure to fail.
@rppicomidi no problem, I will pull and fix that later on. Sorry late response again, I am still busy with other works, and catching up with your PR. Will try to wrap this bulk/midi host support as soon as I could. Please be patient.
look great, though I think we should wrap it all to prevent gcc warnings (if any).
we should do #ifelse for the whole hfclk_enable() / hfclk_disable() to prevent gcc to emit unreachable statement warning
yeah, indeed it is lacking the physical descriptor support. It seems to be an straight forward modification. Since you are working on it, do you have time to make an PR for this ? I could help if you share your example that has the physical descriptor. It probably need to include the physical descriptor in the interface as well.
Superb !! thank you for the fix. sorry for late response, I have been busy and still catching up with PRs :)
changed like dcd_musb.c
@Jasoroony The way I found this problem was that my FreeRTOS task was getting stuck in the lock function after writing a lot of data out while the host was not reading it from the USB serial port. To know whether it is related check with a debug probe and gdb where is your device getting stuck.
Anyway this bug is a really easy fix, just wanted some confirmation from the tinyusb devs that I'm not missing anything.
I, unfortunately, don't have the tools needed to see where it gets stuck. I also can't easily test if the code fix works (though I'm sure it will - at least, it looks perfect to me). I had considered setting up the needed & completely different build environment for ESP32, but it didn't seem worthwhile once I realised "support" there is so fickle. So I stopped testing these devices over 2 months ago, even though I had mostly worked around the problem - but when you know a problem can still...
look great, I just have 2 minor questions, nothing important, but would be nice if they could be clarified.
I am not entirely sure if 2000+ nops is enough for at least 1ms delay. It could have issue with fast mcu. Does pic32 has something like SystemCoreClock.
// try to delay for 1 ms
uint32_t count = SystemCoreClock / 1000;
while ( count-- )
{
__NOP();
}
It is not really a problem for now, we could come back to this later
The usb specs state the delay must be within 1-15 ms. Other mcu is doing well with 1 ms, maybe we should reduce it to 1-2 ms only, 10ms is a bit overkill, would it pass the cv test with 1ms of delay ?

There is no standard SystemCoreClock as provided by CMSIS
There is CPU0 register COUNTER that is kind like Cortex SysTick, I can use it if you insist.
In fact 2000 NOPs at 200MHz is much faster then time you mentioned from datasheet but in my case it was enough to trigger remote wake up every time in contrast to where there is no delay between toggling bit and remote wake up is not activated.
When tested it worked with 50us even
just do a quick check with musb spec, it does indeed say 10ms as optimum value (2-15 ms). So I think 10m here make sense

if it works, then we will leave it as it is now. And come back with a more accurate delay later on. No problem at all.
Note since the timing is out of specs, this maybe specific to the host driver (in this case the usbcv), other host driver (linux/windows/macos) may decide this signal is too short to register as remote wakeup.
perfect !! Thank you, we will come back later on with blocking delay should there is any timing issue with different host drivers.
[hathach/tinyusb] New branch created: fix\-fifo\-mutex\-when\-full
Describe the PR
Fix #1278 wherre fifo write does not release mutex when full and not writable.
thank you very much for spotting the issue. PR #1286 will fix this, if you have time, please try to test it out.
oh, I think I did put the int disable/enable here before, but somehow got reverted.
thank you very much for putting effort to fix this race condition. I have been some hard time troubleshooting this before as well and have done a few PR to improve the race. All changes make sense, changes look small but have a huge impact and is very difficult to trace down.
yeah, right, I fell the data_received is not enough as well.
@hathach Thank you for the update. It looks like #1285 is also looking at bulk endpoints for the RP2040.
@todbot When does the M-Audio Keystation panic? Has it successfully enumerated and panics on the first attempt at MIDI transfer, or does it panic during enumeration? The former indicates an issue with the bulk endpoints, the latter with the control endpoint. Also, can you confirm the RP2040 is only attempting 8-byte transfers before it panics? Finally, please have a look at the USB desc...
Additional mutex lock added during transfer setup to prevent premature interrupt enable that could happen if two tasks started two separate transfers.
Describe the PR
This simple PR is submitted to fix the IDFGH-6508 issue as described here: https://github.com/espressif/esp-idf/issues/8161
The return type in the line /src/common/tusb_fifo.c:719 should be changed to uint16_t instead of bool.
The esp-idf fork then can be rebased to upstream master.
Thank you very much for this excellent PR and sorry for the huge delay in response. I have been lagging behind due to overwhelming work. The PR look great
hcd_port_reset() has a busy loop to assert USB reset signaling during 10-20ms. I think it is not a good way. I guess after hcd_port_reset_end() is implemented, refactor these implementation.
indeed the port reset with blocking delay is not ideal. It is better with RTOS thanks to scheduler but totally not great with non-OS. We will f...
[hathach/tinyusb] New branch created: rx\-host\-example\-ci
- follow up to #1265
- also update comment for unit not ready 3a-00 additional sense
With regard to NAK retries - have you tried setting NAK_POLL to zero?
Just a thought.
Describe the PR
Other drivers already have notification about data sent.
It allows batter control in application on vendor protocol level.
So far tud_vendor_n_write() always flushed data.
It requires to have whole vendor packed constructed before in one buffer.
With this change data do get flushed when endpoint size
is filled on write, when there is no enough data to
fill endpoint data is not sent and subsequent calls to
write functions can add more bytes.
Vendor code ne...
Describe the PR
- Add support for multiple levels of USB hubs. For your consideration Hathach 😄
To get this working reliably I also added a few additonal changes/fixes:
- Check if the shared control buffer is busy and assert if it is. This happened alot on hub status checks, it is aleast visible now if we mess up and conflict multiple control transfers.
- Prevent another device from enumerating if another device is currently being enumerated.
- These tweaks also seems to improv...
@eskimo-software I thought about it but it applies globally and so I didn't do it. What I did is discussed here #1261. If you tried it and it works, that would be very cool to know.
Well, it shouldn't apply to interrupt transfers, so it applying (otherwise) globally shouldn't matter, should it?
In any case, if I can set up a test for this I'll share any results I get.
More thinking out loud - even though it's declared in the descriptor as a Bulk endpoint, is there any reason the host can't operate the IN endpoint as if it's an Interrupt endpoint? That would result in automatic polling and (presumably) correct NAK handling without any special consideration.
(Perhaps this is already standard practice - or there's a glaringly obvious reason why this can't be done. I have no idea.)
Describe the PR
Entering suspend mode clears bit USB_RX_EN in USB_RXCx_REG.
Resuming after suspend state did not enable reception on non-0 endpoints.
It resulted in incoming packets being NAK'ed after resume.
Now, on resume event, all OUT endpoints are checked for pending transfers
and when transfer is not completed USB_RX_EN bit is set by start_tx_packet.
Additionally over-run/under-run masks were off by 4 bits so those interrupts
would never be enabled.
This is a concurrency issue when running in a RTOS environment. When receiving data on a device CDC, in short the issue is that both cdcd_xfer_cb() and tud_cdc_n_read() can call _prep_out_transaction(), but the cdcd_xfer_cb() uses the buffer that _prep_out_transaction() repurposed for the next transfer after the endpoint was released, potentially overriding old data in that buffer with new one before it was consumed and added to the fifo.
The [_prep_out_transaction()](https://g...
Thank you for the fix, I actually don’t have knowledge to test/verify this, but you are the expert on Dialog chip. I have an minor request for the simple if, not a problem at all if you want to merge it as it is.
Could you have the simple if in one line or use bracket for it. I know this style is common in Linux, but it is rather error-prone.
the issue there would be that i don't actually have any working example yet, because i'm currently still stuck struggling getting HID to work. having issues with the standard contradicting itself yet again, and the old classic of applications not giving a damn about the standard to begin with... the funniest bit is that a piece of code copied essentially verbatim from mbed-os which definitely used to work 100% correctly with that application suddenly seems to be not even seen as a HID device ...
Operating System
Linux
Board
Raspberry Pico
Firmware
examples/device/midi_test with modifications
What happened ?
When trying to add multiple MIDI ports, the device will enumerate, but aconnect won't show MIDI ports anymore.
How to reproduce ?
- Clone the midi-test example
- Change #define CFG_TUD_MIDI 4 in tusb_config.h
- In usb_descriptors.c add..
To enum:
ITF_NUM_MIDI_0 = 0,
ITF_NUM_MIDI_STREAMING_0,
ITF_NUM_MIDI_1,
ITF_NUM_MIDI_STREAMING...Operating System
Others
Board
Pi Pico RC2040
Firmware
Checkout v 0.12.0
Build example cdc_msc_hid:
cd ~/path/tinyusb/examples/host/cdc_msc_hid
cmake -DBOARD=raspberry_pi_pico -DCMAKE-BUILD-TYPE=DEBUG -DPICO_DEFAULT_UART=0 -DPICO_DEFAULT_UART_TX_PIN=0 -DPICO_DEFAULT_UART_RX_PIN=1 -DFAMILY=rp2040 -DPICO_SDK_PATH=~/pico-sdk .
make -j
What happened ?
Attaching a USB keyboard to the Pico's USB socket causes an assert fail on the log and the example crashes (LED stops fla...
Appears to be fixed by commit e692fa9ae4b6c8ff7b66dedbecaf745ae2166851 but not in v 0.12.0
According to the getting started documentation the examples can be built using make, but some (all?) of them require cmake to be run first. I am not sure which config options should be supplied to make and which to cmake.
It would be nice if this page was updated to reflect the recommended way to use cmake to build the examples.
Physical descriptor is rarely used I haven't seen one therefore it isn't supported just yet. If there is no practical usage, there is no need to write code for features that isn't used.
cmake is required since the sdk of mcues such as rp2040 and esp32s2 uses CMake. Likewise some specific mcus such as sony spresense, dialog requires additional binary. This repo "assumes" you are already following those MCU setup guide from their vendor.
Describe the PR
Add information on the assumption that module-specific setup steps may be needed to build. See issue #1297
Thanks. I have created a pull-request based on your comment. Feel free to close this issue in any case.
Thanks for the hard work on the project. It has amazing coverage.
I'm sad to say, I don't think the ESP32-S2 usbser library uses the single byte write function that was fixed here. I had zapped the library to rename this function, thinking I could compile my own replacement when the linker complained of the missing import, but it never complained. Then I replaced the entire libarduino_tinyusb.a library with a very small .a library (a copy of another small one in the same directory, but renamed) and I got all the unresolved links I expected... Then I copi...
have you tried to narrow down which line of code or function that causes the issue. It is probably another issue than this one.
Not yet, but it's a public holiday in my country tomorrow... So I will take a look. The thing is though, this test case has been run on a number of micro-controllers, and the Raspberry Pi in gadget mode (it's a really simple test, for each byte the MC gets, it outputs it 16 times) and they all work for as long as the test runs. The ESP32-S2 quickly fails and no longer responds. My request above was to track down which source files (Espressif or yours) were the likely issue.
there is no rush, you can look at this at any time. However, this bug is already fixed. If it does not fix your problem, then yours is caused by another one. If you could trace down the issue to the file belongs to this repo, feel free to open a new issue with detailed info on where & why it failed.
Agreed, I'll enjoy my public holiday tomorrow instead. It's probably a hardware bug in the chip anyway, which would explain the prompt closure of my issue on the Espressif github site.
@t123yh sorry I am lacking behind PRs/issues. I still haven't managed time to look at musb and test the above problem just yet. This PR is already pending for a while and is relatively large. I think we should merge this as it is for now, since it has good running example already. And then do another PR to fix the problem, we could create an github ticket/issue for discussion. That would also minimize effort for other contributors to fix the issue as well. What do you say ?
@t123yh sorry I am lacking behind PRs/issues. I still haven't managed time to look at musb and test the above problem just yet. This PR is already pending for a while and is relatively large. I think we should merge this as it is for now, since it has good running example already. And then do another PR to fix the problem, we could create an github ticket/issue for discussion. That would also minimize effort for other contributors to fix the issue as well. What do you say ?
Yes, I agree ...
The issue I'm having appears to be because there is traffic in both directions within a short time period. PC sends two 64 byte packets, ESP32-S2 starts sending back packets (a multiple of what it received) as soon as it sees the first PC packet. Within a few seconds of it running, there is some sort of clash with the 2nd incoming PC packet (in dcd_esp32sx.c maybe) and one ESP packet (Queue EP 84) does not get a queue entry for tud_task() to process saying it ever finished (USBD Xfer compl...
From some logging, I can see, if in dcd_esp32sx.c - dcd_edpt_xfer() - it manages to set both an in packet request and out packet request, just a little bit before the PC sends data, then you only get an interrupt for the packet from the PC, the transmitted data complete interrupt doesn't fire. A lot of the time, you will get an interrupt as soon as a TUSB_DIR_OUT request is made (this is why it runs for a few seconds) but eventually the two will be set together, and it all stops working.
...
as mentioned above, please open an new issue with detailed information on how to reproduce the issue with one of the stock example or your modified version. Testing with arduino-esp32 won't qualify as bug report since it involves other party code. If you are not sure whether it is a bug or not, open a discussion maybe people with the same issue could comment in.
Thanks, but as I wrote, it's these devices and I'm not using them anymore.
Yes, I agree with you. Thanks for your time and effort.
Thanks, I wish I could be more involved with this port, but the Lunar New Year is coming and there is lots of other works/project. I will look at this later on when I have time. Thank you @t123yh for your contribution. I will make an new issue as reminder for us after the merge
[hathach/tinyusb] New branch created: fix\-mynewt\-sunxi
Describe the PR
fix mynewt build with new dcd driver, we should include a mynewt build in ci to prevent issue like this later on.
the Lunar New Year is coming and there is lots of other works/project
I totally understand this as a Chinese. Happy New Year!
ah sorry, my bad, I haven't read your explanation carefully enough. I guess we are all good then :). If you find any bugs, feel free to file an issue for it.
Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Describe the PR
Add a HCD driver for NXP FRDM-KL25Z.
The HCD driver works with only HCD class.
Additional context
In order to operate as a USB host function, J21 must be shorted. The schematic is shown below.

This PR was tested on cdc_msc_hid example with a low speed mouse(Logitech M-UB48) and a full speed mouse(Logitech G403).
When running with a HUB, some patc...
Describe the PR
If using a USB hub with OHCI host backend will result in a array index out of bounds error.
Additional context
Original line:
https://github.com/hathach/tinyusb/blob/ffb257ac17f162bc5a4c26596d7a1e954db98aa5/src/portable/ohci/ohci.h#L162
It can happen in a few places but one such example is here:
https://github.com/hathach/tinyusb/blob/ffb257ac17f162bc5a4c26596d7a1e954db98aa5/src/portable/ohci/ohci.c#L460
ie. As HUB addresses are >=5, this results in a arra...
thanks, Happy New Year to you as well !!! :tada:
Well..actually not a real feature nor a bug....
Tinyusb compiles fine on macOS 12.2 with Apple silicon....
Just one small thing:
Could add .DS_Store to your .gitignore file?
yes, if you could an PR for this.
No, no actual software bugs, so you're golden, just bad hardware here. But it seems I can reliably detect the Tx FIFO being loaded with 64 bytes of data to send to the PC, but the "clashing" Rx FIFO interrupt reports (with some new scanning of all the registers) that the Tx FIFO has emptied in that next interrupt... And any attempt to reset or retry that transmit also doesn't work. I guess Adafruit's first ESP32-S2 attempt here....... doesn't really work...... But in most other cases, lik...
Thanks, this code used to work but ohci is getting behind host updates/refactoring
Thank you @kkitayam for another excellent PR. I am currently on TET (Lunar New Year) holiday. I will check this out as soon as I could.
- I have never tried multiple MIDI, however string index for interface cannot be 1,2,3 since those are already used for manufacturer, product string. If you dont have any use for those, try to change it to all 0
- Please provide your example code which is compilable for reproducing
- Also provide usb log with
LOG=2and/or 3
Curious to understand if this DMA feature is likely to make it into the main branch ?
I have never tried multiple MIDI, however string index for interface cannot be 1,2,3 since those are already used for manufacturer, product string. If you dont have any use for those, try to change it to all 0
Please provide your example code which is compilable for reproducing
Also provide usb log with
LOG=2and/or 3
I have tried with string index 0.
Here are the files attached:
https://gist.github.com/DatanoiseTV/2499fee93d23234048e8d7b6cea88a38
It kind of falling off my radar due to other pending works. I will revise this later on when having more time. There is no reason why we wouldn’t want this, just want to make sure the API is right.
Look great, thank you
Operating System
Linux
Board
ESP32-S2-Saola-1R
Firmware
ESP-IDF v5.0-dev-1437-gb092fa0730
What happened ?
I am trying few days cdc_msc_freertos to get working. Unfortunately I'm not able to build example project.
I followed up this pull request: https://github.com/hathach/tinyusb/pull/319
So I am able to build every example (yes, hello worl was first where i started) but cdc_msc_freertos I am not...
idf.py build not working properly... so I tried `idf.py -DFAM...
This PR solves two issues that happens with the CCRX toolchain.
The first issue was found in the TU_ARGS_NUM macro. Without this modification it is not possible to build the tinyUSB successfully.
The second issue belong to local pointer variable definition of the type reg_pipetre_t, which is mapped over the PIPExTRE register of the RX USB hardware. To ensure access in the correct size the keyword __evenaccess needs to be used.
Note: Without this modifier, it seems that receiv...
It is mentioned in the https://github.com/hathach/tinyusb/blob/master/docs/reference/getting_started.rst
make BOARD=Your-board
Operating System
Windows 10
Board
Raspberry Pi Pico RP2040
Firmware
Pico C SDK firmware examples and TinyUSB audio examples
What happened ?
Trying 2 examples from TinyUSB examples and both failed with different errors:
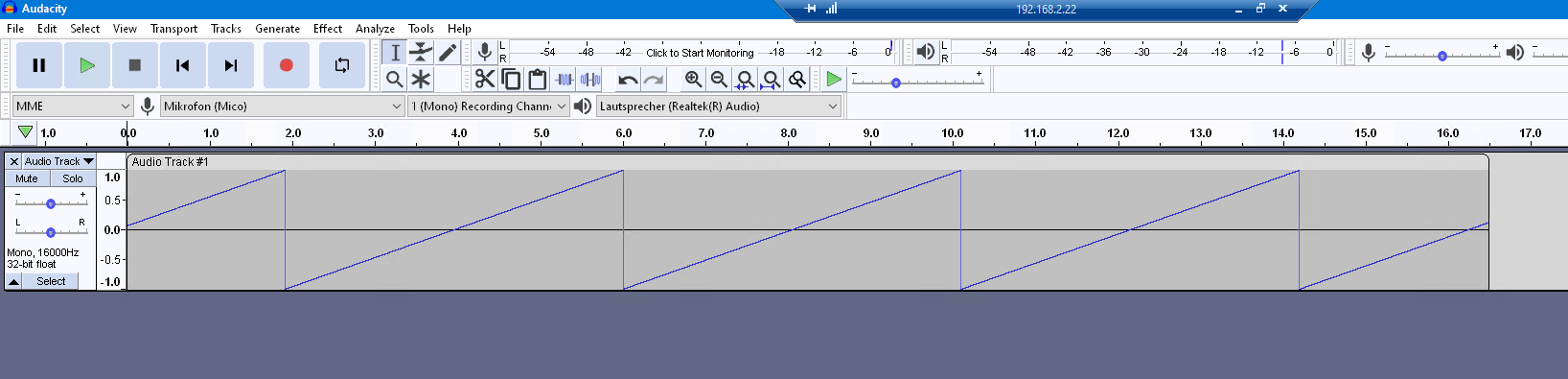
- tinyusb\examples\device\audio_4_channel_mic (not recording anything, should at least record dummy packages)
- tinyusb\examples\device\audio_test (not recognized by Windows 10 -> ERROR_GEN_FAILURE (because the device is in low power state)
H...
Quick update/note
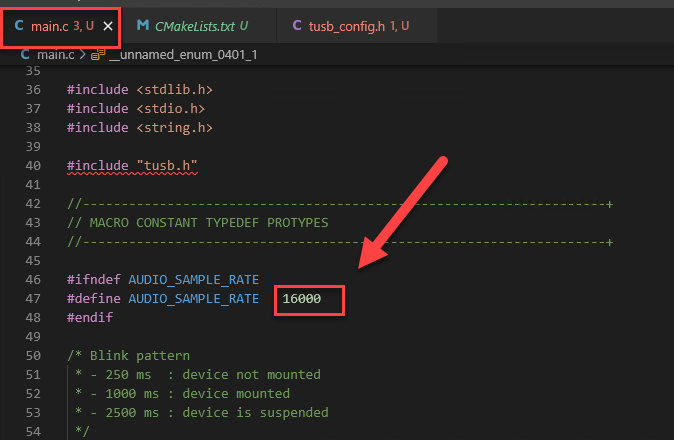
Changing the 'audio_test' example to sample 16khz instead of 48khz make it work though.
...
Ha Thach,
Thanks for this library!
I have been writing some functions to make make interpreting HID report descriptions easier.
I have tried to avoid 'unwrapping' the descriptor which can end up using lots of RAM.
Instead, I've provided functions to help step through it.
Please see:
https://github.com/fruit-bat/tinyusb/compare/master...fruit-bat:hid_micro_parser
I would like to get to the point where the application code can use the parser to interpret joystick/gamepad repo...
thank you very much for your PR. I was putting my KL25z on soldering table, then realize that it is rev D and does not feature the J21 and R82 to test out the host functionality. I will try to test this later on with a newer/better board later on. For now, I fully rely on your testing.

Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Describe the PR
fix a typo in readme
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Operating System
MacOS
Board
ESP32-S3 Devkitm
Firmware
Based on example/hid_composite_freertos and modified to have more interfaces.
Just some modifies to usb_descriptors.c and
#define CFG_TUD_HID 3
#define CFG_TUD_HID_EP_BUFSIZE 64
uint8_t const desc_hid_report1[] =
{
TUD_HID_REPORT_DESC_KEYBOARD(HID_REPORT_ID(REPORT_ID_KEYBOARD))};
uint8_t const desc_hid_report2[] =
{
TUD_HID_REPORT_DESC_MOUSE(HID_REPORT_ID(REPORT_ID_MO...Is your feature request related to a problem? Please describe.
There is supported MSC host classes for many MCUs but I couldn't find any host part for STM32 ARMs.
Is there any possibility of creating HCD drivers for STM32 for USB host applications?
Describe the solution you'd like
I need the HCD port implementation for STM32F7 (STM32F756) device to use as MSC host application. I've already tried my best to implement that port, but I've ended with infinite waiting loop for contro...
Further tests show that EPNUM_HID cannot exceed 0x86 or tud_hid_descriptor_report_cb will never be called. Is it a esp32s3 specific issue or the tusb component problem?
Further tests show that EPNUM_HID cannot exceed 0x85 or tud_hid_descriptor_report_cb will never be called.
Even a minor change of hid_composite_freertos/src/usb_descriptors.c line.106 from #define EPNUM_HID 0x81 to #define EPNUM_HID 0x86 can crash the host enumeration.
Is it a esp32s3 specific issue or the tusb component problem?
Alright I saw the restriction imposed on espressif chips described in
dcd_attr.h. But still wonder why to limit it to six endpoints.
it is hardware limit on S2/S3
Alright I saw the restriction imposed on espressif chips described in
dcd_attr.h. But still wonder why to limit it to six endpoints.it is hardware limit on S2/S3
But I do managed to get the esp32s3 show 6 endpoints(excluding endpoint 0)in USB Device Viewer
The S2 and the S3 datasheets describe the endpoints as follows:
Device Mode Features
• Endpoint number 0 always present (bi-directional, consisting of EP0 IN and EP0 OUT)
• Six additional endpoints (endpoint numbers 1 to 6), configurable as IN or OUT
• Maximum of five IN endpoints concurrently active at any time (including EP0 IN)
• All OUT endpoints share a single RX FIFO
• Each IN endpoint has a dedicated TX FIFO
thank you very much for your PR
thank you very much for your PR
thank you for your PR, and sorry for late response. I have an question regarding swallowing no arguments for ccrx. Could you confirm its behavior.
just for clarification, could ccrx automatically swallow the extra comma when __VA_ARGS__ expanded as no arguments ?
To clarify a bit what @hathach and @dhalbert said: Yes, you do have a total of 7 endpoints available, and they will show in the device viewer, but only 5 of them will have FIFOs to service the requests. The other 2 will not be able to communicate with the host.
Describe the PR
- add callback for msc request sense
TU_ATTR_WEAK int32_t tud_msc_request_sense_cb(uint8_t lun, void* buffer, uint16_t bufsize);
- change most default sense error to medium not present (0x02, 0x3A, 0x00), which is better suite for most user scenario.
- response to
SCSI_CMD_PREVENT_ALLOW_MEDIUM_REMOVALas unsupported request in all msc examples. This is required for macos to send TEST_UNIT_READY regularly for "SDCard reader" application. Response OK t...
No, it generates a compiler error if no argument is passed. Is it intended to call this macro without an argument ?
Thanks for clarification, it is not quite intended to use without arguments, but the macro is for counting number of arguments. So it is more like it will work from 0 to n. Luckily, currently there is no usage for counting zero arguments, but it may (or not) be needed in the future.
If the CCRX does not support this extension, we could just merge this as it is, no problem at all.
Describe the PR
Fixes the link to supported boards on the Getting Started page.
Operating System
Others
Board
Not hardware specific
Firmware
No custom firmware present
What happened ?
This line in src/class/hid/hid.h is incorrect:
#define HID_REPORT_ID_N(x) HID_REPORT_ITEM(x, RI_GLOBAL_REPORT_ID, RI_TYPE_GLOBAL, n),
It should read:
#define HID_REPORT_ID_N(x, n) HID_REPORT_ITEM(x, RI_GLOBAL_REPORT_ID, RI_TYPE_GLOBAL, n),
How to reproduce ?
Source inspection
Debug Log
No response
Screenshots
No response
[hathach/tinyusb] New branch created: fix\-HID\_REPORT\_ID\_N
Describe the PR
fix #1329
thank you for reporting this issue, it will be fixed by #1330
Describe the PR
Fix build with latest IDF
Operating System
Windows 11
Board
B-L475E-IOT01A
Firmware
example/device/hid_composite_freertos
Modify the way FreeRTOS creates tasks, the hardware interface is adapted, and no data is sent during this example.
What happened ?
It will assert failure whether in debug or run mode.
I'm sure it's not a hardware issue, it's an official ST development board and works fine using the official USB library, but even if the tinyusb assertion fails, it also still works fine, ...
For your consideration.
Introduces a micro HID report description parser and provides an example of its use by mapping HID joystick reports.
Combined with Ryzee119's mulit-hub modifications it works on an RP2040. Sorry, but it's not tested on any other architectures. On the RP2040, it works nicely with a hub hosting several joysticks.
I've tried to keep the existing tinyusb API the same but made some additions in hid_ri.h and hid_ri...
While the existing examples include several DirectInput ones, the emulation of recent xbox controllers is missing.
Xbox controllers are very common today, many games don't accept the input from a DirectInput device, so I think it'll be useful.
Here is a repo that may help: https://github.com/FeralAI/MPG
I assume non standard class drivers are a non-goal of this project.
I have a xinput USB host driver for TinyUSB, https://github.com/Ryzee119/tusb_xinput, but 'emulating them' as a usb device shouldnt be hard if someone hasnt already done this.
Ive done Original Xbox controllers before, however those arent 'X-input'.
I have made a STM32F7 HCD driver before using HAL_HCD though. Might be a starting point, you still to setup the USB gpio, clocks and the otg_irq etc.
https://gist.github.com/Ryzee119/5a1b74e98449fdf5ed24b3f361ff4e2c
Thanks a lot for your input. I've looked it up but it's hard to understand it for me, because there is no comments and it looks (style) like my code - no comments but with attempt of something like self-descriptioning code by usefull naming patterns.
Anyway, I've created CubeMX project with HAL layer for my F756 MCU and I've implemented TinyUSB and your HCD driver there. After succesfull port with no error build I've tried to run it, but unfortuanelly, it didn't work well.
After attaching...
Yea admittedly, I hadnt tested bulk transfers so that may be an issue :)
like my code - no comments but with attempt of something like self-descriptioning code by usefull naming patterns. 😁
@DatanoiseTV I do not think the issue is with TinyUSB. I modified the example descriptors.c using the following code snip. Now amidi -l shows all 4 virtual cables. Please note the change to the CONFIG_TOTAL_LEN macro. I hope this helps.
$ amidi -l
Dir Device Name
IO hw:1,0,0 TinyUSB Device MIDI 1
IO hw:1,0,1 TinyUSB Device MIDI 2
IO hw:1,0,2 TinyUSB Device MIDI 3
IO hw:1,0,3 TinyUSB Device MIDI 4
Code Snip:
#define CONFIG_TOTAL_LEN(num_cables_) (TUD_CONFIG_D...@Ryzee119 Thank you for replying! I build my own driver refer to the repo I mentioned and finally get a device called 'Xbox 360 Controller for Windows' is that the goal? Because my first aim was to get a 'Xbox One Controller', am I getting a wrong descriptor or something else?
Thank your for the PR and sorry for late response, this somehow falled off my radar. The current implementation of nrf5x indeed has issue with race condition in preempted RTOS. I was hoping to use LDREX/STREX to have mutex, but couldn't get those to work. In the future, I think we could make use of semaphore as resource management instead of mutex which make a little bit more sense.
Looks good to me! Thank you for the clarification.
CI failure isn't doc related.
Operating System
Others
Board
Custom i.MX1064RT, running FreeRTOS and custom application
Firmware
src/portable/ehci/ehci.c
hcd_int_handler() clears the interrupt status register in a way that can result in lost status and system hang.
I looked through the repo, and can see the error in commits going back at least nine years, through present day.
What happened ?
hcd_int_handler() clears the interrupt status register using an |=, rather than a simple =. The status ...
This reads HID devices over host and then translates that to ASCII
and sends it over CDC device.
[hathach/tinyusb] New branch created: release\-0\.13\.0
Describe the PR
release 0.13.0 since up coming PR would include notable changes for multiple ports usage.
Describe the PR
Updates the host HID code to open the OUT endpoint (if it exists). Also adds handling for interrupt OUT to the RP2040 host code. (at least, that seemed to be enough)
Additional context
I've been trying to connect a Wii U GameCube adapter, which requires some data to be sent to it before it starts sending reports. This PR doesn't add any code for actually doing that, but having the endpoint open helps.
(I've only tested this as far as sending the one byte I need...
Operating System
Windows 11
Board
Any
Firmware
Compile a simple cpp file including tusb.h
// main.cpp
#include
int main(void)
{
return 0;
}
What happened ?
Cpp compiler complains about TU_VERIFY_STATIC with the following errors:
this declaration has no storage class or type specifiertoo many initializer valuesvariable "_Static_assert" has already been defined
How to reproduce ?
Create an empty IAR project with includi...
The problem seems to come from IAR that defines __STDC_VERSION__ in cpp as well.
Which causes TU_VERIFY_STATIC to be defined as _Static_assert instead of cpp's static_assert.
A simple fix is to reorder __cplusplus__ to be first, then to fallback to __STDC_VERSION__ if not CPP.
thank you for filing the issue and detail explanation. Since you could already reproduce the issue, would you mind making an PR for the changes? That's way we know for sure the issue is fixed and tested on your hardware. I could make the PR, but that would take time since I needs to find a way to reproduce the issue first.
would you mind making an PR for this ? Since I don't use IAR at all to verify the result.
IAR defines STDC_VERSION in cpp as well.
Which causes TU_VERIFY_STATIC to be defined as _Static_assert
instead of cpp's static_assert.
This reorders cplusplus to be first, then to fallback to
STDC_VERSION if not CPP.
Yes, sure. This is on it's way ;)
I experienced this same problem with an IAR build, and fixed it in the exact manner proposed.
I have subsequently learned that C11 also defines a macro, 'static_assert', in assert.h, that maps to C11's '_Static_assert' keyword. Relying on the macro would allow the C and C++ cases both to use static_assert(), with no need to differentiate.
This PR adds support for RNDIS with the CCRX toolchain. It also adds endian independent support (means it is working in big and in little endian configuration).
Note: This PR needs the modification in the PR #1311 to work without any problems.
Modification
dnsserver.c: Use of the pack macros from the cc.h port file (required for every port of the lwIP)
rndis_report.h: New macros that are be calculated by the preprocessor and are used within compile-time constants only (so tha...
Will do. It is a simple change, but I won't be able to get to it until tomorrow, CST.
Okay, I didn't get to this today, but I did finish a major task today, so I will block out some time tomorrow for this (different tomorrow than the one yesterday, I know; call it second-tomorrow).
Describe the PR
The standard inquiry response additional length field needs to be set to the length in bytes of the remaining standard inquiry data (i.e. N - 4), otherwise the kernel driver issues a warning about short inquiry response.
Additional context
On Linux I see the following warning, it seems the driver assumes the response is the minimum 36 bytes:
[53564.998251] usb-storage 4-2:1.2: USB Mass Storage device detected
[53564.998424] scsi host0: usb-storage 4-2:1.2
...Superb! This is a great example to show that the stack is able to run both host and device at the same time. I have tested and did a bit of example update. Will merge when ci passed.
It's - 4 in the both the SCSI reference manual linked above, and the RPI bootloader you mentioned.
I realized this actually makes sense and it must be - 4 because if it was - 5 the kernel would have issued a warning (total length would have been 35). With - 5 in the STM32 driver, it seems you're sending 37 bytes.
I was wrong, I did some more testing and even though the specs say it'sN - 4, I can confirm it should be N - 5. I used sg_inq util to send a standard inquiry, and with N - 4 I get the following response (Note the length):
> sudo sg_inq --only /dev/sda
standard INQUIRY:
PQual=0 PDT=0 RMB=1 LU_CONG=0 hot_pluggable=0 version=0x02 [SCSI-2]
[AERC=0] [TrmTsk=0] NormACA=0 HiSUP=0 Resp_data_format=2
SCCS=0 ACC=0 TPGS=0 3PC=0 Protect=0 [BQue=0]
EncServ=0 Mult...just tested, work great. additional_length is length until end of response. I guess the spec (N-4) where N = 35, scsi specs is known to be quite confusing. Thanks dpgeorge for reviewing.
Describe the PR
- better support multiple ports
- merge dcd & hcd attr
- auto detect high speed on supported mcu with on-chip PHY (WIP)
take your time, not a rush at all
A port of FreeRTOS is available for the RP2040 now.
Describe the PR
Removed RP2040 from skip.txt in FreeRTOS examples.
Additional context
https://github.com/hathach/tinyusb/discussions/1348#discussioncomment-2250901
remove rp2040 from skip.txt is not enough. Have you tried to run any freeRTOS demo with pico-sdk/pico-examples. If not please try to do that first, then update cmake of cdc_msc_freertos to matche cmake of those examples.
@Wini-Buh would you confirm that ##__VA_ARGS__ as swallowing semicolon with zero-argument is not supported on CCRX
I realized after the fact that my PR was premature.
I will get it compiling properly and update this PR.
…', rather than an '|='. Use of the latter caused an extra, unwanted read of the status register before the write-to-clear operation, which, in some cases, allowed new status bits to assert (relative to the initial read of the status register two statements earlier), and then be cleared blindly and unconditionally during the write-back. This had the potential (and, in my case, observed) effect of dropping the handling of an enabled interrupt. Ultimately, the system would lock up in a busy ...
Calling this macro with an argument TU_CHECK_MCU(OPT_MCU_RX72N) :
with _TU_NARG(_0, ##__VA_ARGS__,_RSEQ_N()) sub-macro
-> compiles with an error with the CCRX toolchain
with _TU_NARG(_0, __VA_ARGS__,_RSEQ_N()) sub-macro
-> compiles successful with the CCRX toolchain
Calling this macro without an argument TU_CHECK_MCU()
with _TU_NARG(_0, ##__VA_ARGS__,_RSEQ_N()) sub-macro
-> compiles with an error with the CCRX toolchain
with `_TU_NARG(_0, VA_ARGS,_RS...
…ous structs defined within the usbh_dev0_t and usbh_device_t structs as they are defined. The problem seems to relate to the placement of the 'volatile' keyword at the struct level. I fixed the problem by removing the 'volatile' from the struct level, and instead placing it on each of the field declarations within the structs.
Describe the PR
IAR compile-time errors on src/host/usbh.c are removed by reassigning 'volatile' keyword from the struct level in two anonymous structs withi...
I see, apparently ##__VA_ARGS__ is not supported by ccrx
seems like ##__VA_ARGS__ is not supported on CCRX, we probably need to avoid counting zero agruments
thanks for the update, look good
Describe the PR
more mcu attribute and symbol rename
MCUboot is a very capable bootloader that is being adopted across the industry and has many advanced features, but a special emphasis on security. While some of the ports have USB DFU support (I think just Zephyr atm,) there isn't a complete USB solution in the bootloader.
What inspired this idea was me looking into UF2 support for Zephyr, but being able to use the secure boot features of MCUboot (see mcu-tools/mcuboot#1309.) I'd imagine it could look similar to...
Thoughts on the idea? Suggestions on an approach?
this isn't a feature of a usb stack, this issue should be opened on the mcuboot repo for their maintainer to add the support tinyusb.
Makes sense! I opened mcu-tools/mcuboot#1309 moments ago.
Would it be more appropriate to convert this to a Discussion instead?
I don't see any points of adding bootloader support to a usb stack feature unless the mcuboot has some specific needs for the stack. Top of my head it would be a special minimal for size optimization, you can open an ticket later with more specific requirement from the mcuboot team.
Hopefully all the tests will pass now (I've build and tried them on a 64bit environment).
Also, I've removed the #include that seemed to upset some of the non-rp2040 builds.
Thanks,
fruit-bat
thank you, I haven't tested it out, but look good and changes is spot-on with //TODO ,
Operating System
Others
Board
Custom NXP i.MX1064 RT board w/ FreeRTOS
Firmware
The tusb_option.h file causes an error during a host build because the #define of TUD_OPT_HIGH_SPEED uses TUD_OPT_RHPORT as a shift value. TUD_OPT_RHPORT is set to -1 for host-mode builds.
A likely fix would be to condition the #define of TUD_OPT_HIGH_SPEED on CFG_TUD_ENABLED (defined on the previous line) evaluating to "true". I do not want to propose that fix specifically, as I do not have ...
Good to get to the bottom of this, and thanks for the hint about sg_inq. I can see that the RP2040 bootloader has the same issue, a length of 37.
I can see that the RP2040 bootloader has the same issue, a length of 37.
Yes it seems to be a common issue due to the specs typo.
The USB descriptors for the microphone examples don't have any Device Qualifier Descriptor included. Have you tried to add one?
@hathach Do you think we could implement the SOF nicely into the audio framework together with low power mode handling? I think new users would be happy of this feature.
For DMA support, we would need the dcd_edpt_xfer_fifo() to get working. I once pushed some untested code implementing that feature. Curiously, right now all of that code is commented out but present in the main branch. All parts are marked with // TODO support dcd_edpt_xfer_fifo API. I was not able to test the code because i don't have any hardware.
Directly copying data into the USB hardware buffer by use of DMA is not possible also not in the synopsis case. The trick is to copy the dat...
I believe that there is a mistake in the definition of TUD_AUDIO_HEADSET_STEREO_DESCRIPTOR. The nitfs in the audio descriptor is always 3 regardless of ITF_NUM_TOTAL.
Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Thanks for reply.
Actually i managed to get it working with the UAC Headset example. I stripped it down to mic only:
MIC ONLY
// Unit numbers are arbitrary selected
#define UAC2_ENTITY_CLOCK 0x04
// Speaker path
#define UAC2_ENTITY_SPK_INPUT_TERMINAL 0x01
#define UAC2_ENTITY_SPK_FEATURE_UNIT 0x02
#define UAC2_ENTITY_SPK_OUTPUT_TERMINAL 0x03
// Microphone path
#define UAC2_ENTITY_MIC_INPUT_TERMINAL 0x11
#define UAC2_ENTITY_MIC_FEATURE_UNIT 0x12
#d...Even mic stereo works :-)
// #include "tusb.h"
// Unit numbers are arbitrary selected
#define UAC2_ENTITY_CLOCK 0x04
// Speaker path
#define UAC2_ENTITY_SPK_INPUT_TERMINAL 0x01
#define UAC2_ENTITY_SPK_FEATURE_UNIT 0x02
#define UAC2_ENTITY_SPK_OUTPUT_TERMINAL 0x03
// Microphone path
#define UAC2_ENTITY_MIC_INPUT_TERMINAL 0x11
#define UAC2_ENTITY_MIC_FEATURE_UNIT 0x12
#define UAC2_ENTITY_MIC_OUTPUT_TERMINAL 0x13
#define ITF_NUM_AUDIO_STREAMING_SP...Good to know! So the without the speaker part the example works?
The current mouse support is limited to relative positioning.
This PR adds absolute mouse descriptor template and descriptors.
to follow the naming of the rest of the structs, this should be renamed to hid_abs_mouse_report_t
First of all, thanks a lot for this project!
I would like the cdc_msc_hid example to be extended in order control the keyboard Caps/Scroll/Num Lock leds when a keyboard is connected in host mode.
Or if you can provide some quick code, I might integrate it into the example and provide a PR.
Thanks in any case :).
Plus typo fixes, GCC11 array bounds fix, snprintf for malloc-free
debug and pragmas for alignment checks.
[hathach/tinyusb] New branch created: fix\-esp\-idf
Describe the PR
Fix build with latest IDF
[hathach/tinyusb] New branch created: perigoso\-patch\-1
Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
thank you for PR, I make some changes to the API
- skip get index, and straight to get manufacturer/product/serial string (you may need to update the cpythong accordingly)
- add more API for all descriptor: device, configuration, string
- add configuration_set() not required to be called by application, added just it is there
- There is other unrelated name change for max endpoint macros. Just do it since I am already there.
I also add an stub example bare_api to demonstrate the api...
sorry to merge without your review, but i trust you are ok with it since its just a tiny doc fix
no problem at all, thank you for the fix
Setting the indices was commented out. Return false if the index is 0 because that indicates there is no string descriptor for it.
Describe the PR
This PR adds support for STM32WB55 MCU.
p-nucleo-wb55 board is also added.
This MCU has stm32_fsdev FS device USB block same as some others ST devices (F1, Gx)
Additional context
ST provided headers have incorrect value of USB_PMAADDR that is used in stm32_fsdev code.
Issue is filed on their github.
So for now this is fixed on TinyUSB side.
Ah right, I forgot to revert the debug changes. Will do more test with new bare api example later
Thank for your issue, to be honest, I am not familiar with xinput and xbox controller ( I dont have one to test it out), however, we can thing easier for user with predefined hid descriptor and structure report. I could made an example for ps4 controller since it is what I have. Hopefully that would pave the way for adding similar pr for xbox one. Will post ps4 here whenever it is available
Hihi, sorry for super late response, I have buried in work ever since the TET holiday. I will check this out as soon as I could
Thank you, sorry for super late response, I have buried in work ever since the TET holiday. I will check your pr out as soon as I could
Thank you for that:) I've done my implementation of an Xbox 360 controller since cracking an Xbox One controller might not be legal, although in a rough way. I could post my code later if you are interested, it'll be great to have it polished and be a part of the tinyusb stack.
Thank you for your PR. Look great
[hathach/tinyusb] New comment on pull request #1290: usb host: Add support for multi\-level USB Hubs
Thank you for your PR, sorry for my late response, I am still catching up with pr/issue. Will check this out as soon as I could. Meanwhile, I will order an extra hub to test this.
Thank you for your issue, would you mind making an pr to demonstrate the changes and since you are already at it. I could revise this, but I currently have a huge issue with (lack of) time.
Thank you for your report, it is due to one of latest changes. I will push a fix soon
No worries and thanks for running the builds. I think I can see what is causing the problems... I will make some changes get back to you.
It is very minor, I think the family name should be stm32wb 55 is too specific. Other than that, everything looks great.
It is very minor, I think the family name should be
stm32wb55 is too specific. Other than that, everything looks great.
I agree, let me change it. I used 55 because this is the only part that has USB.
It is very minor, I think the family name should be
stm32wb55 is too specific. Other than that, everything looks great.I agree, let me change it. I used 55 because this is the only part that has USB.
oh I didn't know that, but I guess that could be changed in the future. It is still better to rename it
I have not problem with changing family it to WB only.
btw. while you are on it, maybe you can suggest how to set UF2_FAMILY_ID = in make file.
It's new to me, and I did not dwell on the subject really.
It is the ID for DFU example with board pre-flashed with uf2 bootloader such as https://github.com/adafruit/tinyuf2 . The ID is managed by uf2 specs, ID for stm32wb is as follows. It is optional, for convenient purpose only. So far most of the board is devkit with dedicated jtag/swd debugger.
Modify the wrong macro definition code
thank you for the fix, will merge when ci passed.
Family changed to STM32WB.
I also change board name to stm32wb55nucleo to match other nucloe boards naming convention.
This make it possible to setup Mynewt project with latest releases.
Describe the PR
A clear and concise description of what this PR solve.
Additional context
If applicable, add any other context about the PR and/or screenshots here.
Describe the PR
mostly implement and close #1231 , add new
- dcd_sof_enable(uint8_t rhport, bool en)
- void tud_sof_isr_set(tud_sof_isr_t sof_isr)
- implement dcd_sof_enable() for rp2040
- add dcd_sof_enable() stubs for other ports for now
Other unrelated clean up
- remove broadcom/synopsys (replaced by synopsys/dwc2)
- add CFG_TUD_INTERFACE_MAX for max number of interfaces, default to 8.
thanks for the reminder, I just made an pr #1381 that added the tud_sof_isr_set() to set sof handler. This will enable/disable the SOF irq respectively. Please let me know your feedback/review on that PR.
2 Questions to go with this as my memory is failing me.
1: Queuing it with in_isr set to true means that the event fires in the ISR context? SoF entry timing tends to be quite critical so would like to confirm.
2: This "breaks" the current Driver convention of specifying the callbacks/event handlers in the Driver Structs. Should the initializers be updated to support that instead of just this "new api" specific to SoF as it is now?
Great work as always happy to see this getting imple...
2 Questions to go with this as my memory is failing me. 1: Queuing it with in_isr set to true means that the event fires in the ISR context? SoF entry timing tends to be quite critical so would like to confirm. 2: This "breaks" the current Driver convention of specifying the callbacks/event handlers in the Driver Structs. Should the initializers be updated to support that instead of just this "new api" specific to SoF as it is now?
Great work as always happy to see this getting imple...
I would love to hear @PanRe 's opinion as well. This is also something that can be dealt with later. More of a "trying to keep everything unified" and not have a ton of specific extensions to things.
SoF is not needed for every application, but those who need it tend to always need it. Being how expensive it is however I definitely think being able to disable it should be kept as part of the API.
I think for the user land driver specifying that sof callback should populate the ISR callb...
Should be ready for another run.
[I'm developing on a Raspberry Pi and I'm not sure how to get rx-elf-gcc setup... so some of the builds may still be a bit hit and miss - sorry - and hope this is ok!]
Operating System
Linux
Board
esp32s3
Firmware
https://github.com/kaspernyhus/tinyusb/tree/audio_test_freertos/examples/device/audio_test_freertos
What happened ?
I made a freertos version of the audio_test example.
Audio samples are coming through, but every other usb packet is missing data (see wireshark screenshots)
48kHz/16bit, 1 channel.
How to reproduce ?
clone my fork
go to tinyusb/examples/device/audio_test_freertos
make BOARD=espressif_s3_devkitc all...
@ccrome You are right, it should be 3 as this examples clearly has 3 interfaces (control/speaker/microphone). My bad.
[I'm developing on a Raspberry Pi and I'm not sure how to get rx-elf-gcc setup... so some of the builds may still be a bit hit and miss - sorry - and hope this is ok!]
I tried to compile with rx-elf-gcc. Some errors were reported shown below. Of course, it is OK by adding two options -Wno-error=unused-parameter and -Wno-error=format= for the errors to CFLAGS in examples/host/cdc_msc_hid/Makefile.
C:/tinyusb/examples/host/cdc_msc_hid/src/hid_app.c:52:46: error: un...I think it is a great feature! The correct place to impment this in the audio driver is the audiod_set_interface() function. There, the interfaces are open and closed. I lookup the implementation details this week (i hope). Unfortunately, i miss the hardware to test the speaker functionality, @geekbozu i guess you could test it?
Hello,
No such thing as a stupid questions here!
I have filtered for EP1 messages 3.65.1 (bus 3, device 65, EP1). I believe EP 0x81 means an IN endpoint at EP1 for data, yes.
What the pictures show is that for every second packet there is no data payload, only header bytes (176 bytes when full / 80 bytes with no data). There should be 96 bytes in the payload every 1ms, I believe. I cross checked with the same example on the pi pico, and there was indeed data in every packet.
Does that mak...
I will need to find time but yes I only have STM32 board for this however not RP2040 as of the moment.
Ah now i am on track, thanks for the clarification. Indeed that seems weired, there should be a packet scheduled every ms. What puzzels me right now is that the saw-tooth-test signal looks without gaps. The audio_test example sends increasing values from 0 - 2^16-1. So in the first packet, there sould be numbers ranging from 0 - 47, in the second from 48 - 95, etc. If every second packet is missing, there sould be jumps of 48 in that signal. There "might" be jumps in your plot but i am not ...
Sorry, didn't know about the Discussion section.
Anyway I found what I was looking for here, I'm leaving this for reference.
Here I have decoded three concecutive packets containing data 2ms appart:
raw data packet 1 [f0fff1fff2fff3fff4fff5fff6fff7fff8fff9fffafffbfffcfffdfffeffffff00000100020003000400050006000700080009000a000b000c000d000e000f0010001100120013001400150016001700180019001a001b001c001d001e001f00]
raw data packet 2 [20002100220023002400250026002700280029002a002b002c002d002e002f0030003100320033003400350036003700380039003a003b003c003d003e003f0040004100420043004400450046004700480049004a004b004c004d...MicNode
Manufacturer: PaniRCorp
Serial Number: 123456
Speed: 12Mb/s (full)
Bus: 3
Address: 6
USB Version: 2.00
Device Class: ef(misc )
Device Subclass: 02
Device Protocol: 01
Maximum Default Endpoint Size: 64
Number of Configurations: 1
Vendor Id: cafe
Product Id: 4010
Revision Number: 1.00
Config Number: 1
Number of Interfaces: 2
Attributes: 80
MaxPower Needed: 100mA
Interface Number: 0
Name: snd-usb-audio
Alternate Number: 0
Class: 01(audio)
...btw I also sniffed the usb traffic using an ellisys USB Explorer with same results as in wireshark :)
[hathach/tinyusb] New branch created: more\-host\-bare\-api
Interesting. However, we may not trust the time scale of audicity (maybe, i don't know audicity this well). It could be, that audicity just uses the information, that 48 kHz is the sample frequency. Can you test this another way? Can you schedule a recording lasting exactly 2 * 1.365 seconds? Not the corresponding amount of bytes but really in time. If the received signal has two saw-tooths also the timing is ok. If the bandwidth was halfed, only one saw-tooth should be received (half the byt...
Describe the PR
This PR generalizes the previously named renesas usba driver that supported the renesas RX family of MCUs into the link driver, named after the name of the usb core according to renesas (LINK core), it also adds support for the cortex m family RA.
Along cmose the support for one of the evaluation boards [ek-ra4m3](https://www.renesas.com/us/en/products/microcontrollers-micr...
I believe I'm done here, the RX family port needs fixes, but I can't deal with that easily so I would appreciate If someone picked that up for me
Not sure what is wrong with the Rx build, I would appreciate if someone pick this up for me
Many thanks both. I tweaked my compile settings to be fussier, which I think will get rid of the problems highlighted by kkitayam.
I now get a nice clean run of
python3 tools/build_family.py rp2040
Ready for another try when you get time.
Thanks for your patience.
This example shows an issue with the host event queue filling up on iMX RT 1060 EVK without an RTOS.
I run the example both with LOG=0 and LOG=1, it seems to work well. Could you post your Log here, also, do you have any other device (keyboard/mouse/drive) to test with. It is possible that the electrical stuff is not stable and cause lots of fake attach/remove event which overflow the stack.
Please don't run the build yet, I seem to be having some problems with the ceedling tests.
I'm not sure how I would do that.
However I think you are correct in not trusting audacity!
I tried to do a recording on my macbook using reaper and the results are very different indeed! Are we seeing the consequences of the missing packets here maybe?
To have a reference I made a recording of the original audio_test example on an rp2040.
<img width="1672" alt="Skærmbillede 2022-03-10 kl 12 23 09" src="https://user-images.githubusercontent.com/46648238/157653881-75b3af42-235f-4225-b...
I had to reread your post earlier. I can confirm that the actual recording time is affected!
I tried to time what should be 4 * saw-tooth ≈ 5.5seconds:
the esp32s3 has 2
the pico has 4
!!
You may conduct this test by use of the python script in the audio test example. Set the duration to roughly 2.7 seconds.
Ok, then the MCU is too slow in loading the 48 samples or 96 bytes into the fifo and from the fifo into the usb buffer. Can you increase the clock frequency to speed the MCU up? Another possibility would be to reduce the workload in the example... but this would be a bit of work. One idea would be to trick the fifo into thinking something is contained in the fifo (by use of tu_fifo_advance_read_pointer()). Another one would be, to use a DMA to load data into the fifo.
Or the rtos intervenes somehow and keeps the MCU too busy.
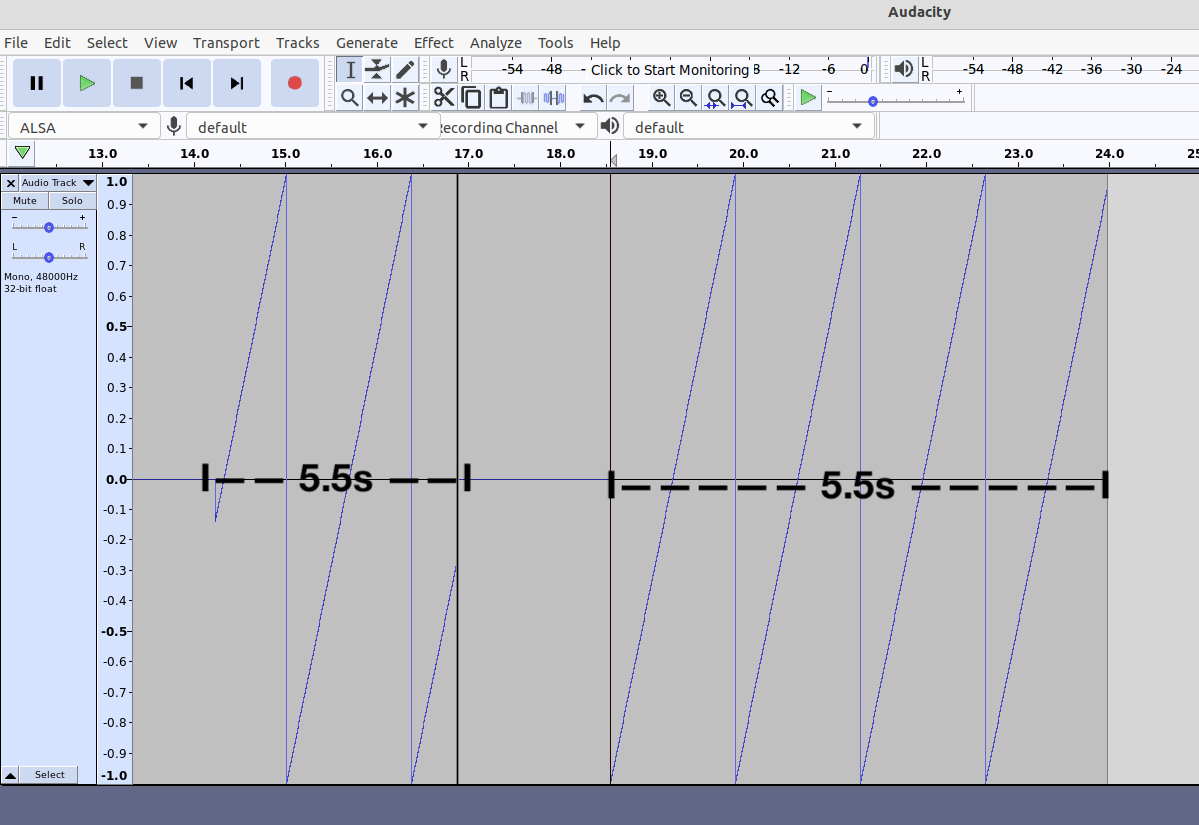
recording time ≈5.5 in both cases
Or the rtos intervenes somehow and keeps the MCU too busy.
I have been trying to look into this by using the trace option in the esp-idf and visualize using SEGGER SystemView.
Looks like the interrupt handler _dcd_int_handler is only getting called every 2ms
The mcu is running at full speed 240MHz
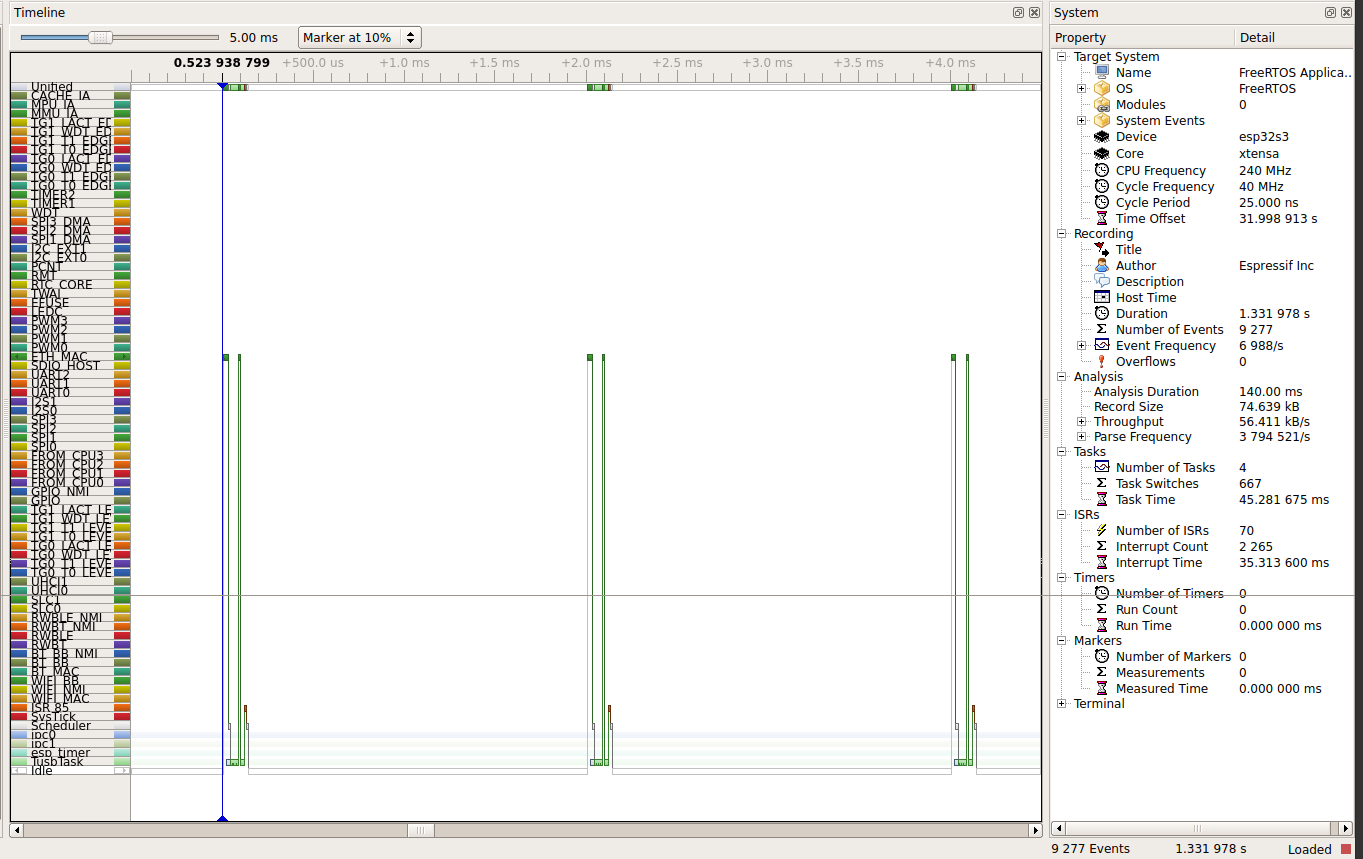
Not sure this is of much value, but it shows the tud_task (second from the bottom) is scheduled to run with 2ms interval triggered by an interrupt (labeled "ETH_MAC" here for some reason)
I also notice the tud_task being interrupted by the same interrupt before finishing.
Ok that seems to be some configuration error regarding rtos. Performance is more than enough available ^^ and the USB protocol polls every ms but only every second triggers an interrupt. Unfortunately, i am not that experienced with freeRTOS. @hathach do you have an idea on this?
I will need to find time but yes I only have STM32 board for this however not RP2040 as of the moment.
which stm32 board/mcu you are using, I could add sof implementation for it.
STM32F411RCT
Its the synopsis driver, My implementation here
https://github.com/geekbozu/tinyusb/commit/ce8499acb6a6268a42e4a4bc8b44a12e2e699ec7
Thanks!!
Describe the PR
Several enhancement to host stack
- refactor endpoint claim/release shared (host & device)
- fix several enumeration issue with hub
- add mutex support for host control transfer, return false if there is on-going transfer already.
- merge usbh_control.c to usbh.c
- rename host descriptor API e.g tuh_descriptor_device_get() --> tuh_descriptor_get_device()
Yup, the device I'm seeing the failure with is low speed. Here is the device info output I get with LOG=3:
1 vid 045e pid 0040
Product: Microsoft 3-Button Mouse with IntelliEye(TM)
Manufacturer: Microsoft
I'll test with more devices I have here and follow up on this PR.
A low speed (WASD Code) keyboard does seem to work:
1 vid 04d9 pid 0169
Product:
Getting the product string does cause a stall though. That's why it is missing.
I've added a speed print to the example.
I tested a second mouse of the same type and it shows the same issue. So, it is that particular mouse that has this issue.
I tested a bunch of other devices that do work:
Joystick from Thrustmaster:
1 vid 044f pid b10a
Full speed
Product: T.16000M
Manufacturer: Thrustmaster
EZUSB bootloader for Intellikeys:
1 vid 095e pid 0100
Full speed
Kensington trackball:
1 vid 047d pid 2048
Low speed
Product: Kensin...Looks good overall to me. One minor comment.
Want to actually delete this for the PR?
yeah, right, forgot to remove this one :)
great work, thank you for more testing
[hathach/tinyusb] New branch created: merge\-host\-example
Describe the PR
merge device_info example into bare_api one, since they did something similar
Almost certain to work this time 🤔. Ready for another try... Thanks!
for the record I'm finding the same exact issues on the esp32s2 as the esp32s3
You're welcome.... took me a bit to track down when I added a CDC device to my audio device. Thanks for the awesome library and examples!
Why do you made the the missing register definition so complicated ?
The following definition would do it for your case without doing changes umpteen times across the whole usb driver file:
#if CFG_TUSB_MCU == OPT_MCU_RAXXX
#include "bsp_api.h"
#include "renesas.h"
#define USB0 R_USB_FS0_BASE
#else
#include "iodefine.h"
#endif
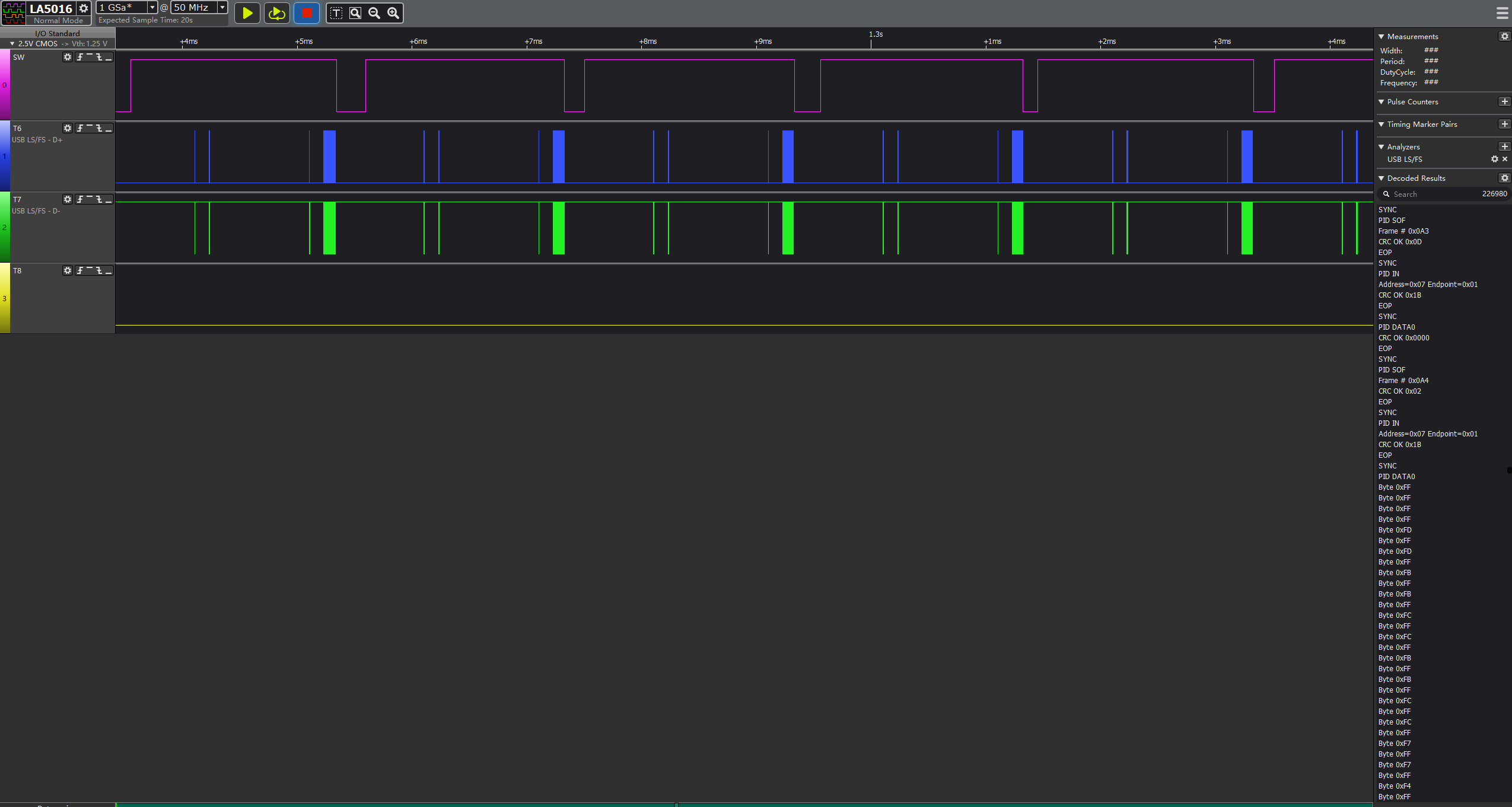
I found the same problem when I used the IO flip as a marker in the _dcd_int_handler and found that the RTOS generated only one interrupt request for every two DATA_IN requests on the physical line
Operating System
Others
Board
EPS32-S2 ro S3
Firmware
Tinyusb with SD card as MSC device
What happened ?
1.Function:Mass Storage Class (MSC) .
2.EPS32-S2 ro S3 with SD card whole as MSC device.
3.Error1:on PC(personal computer) internal efi shell environment,Pull and insert Tinyusb's usb device(base on EPS32-S2 ro S3 with SD card),will lose Tinyusb's usb MSC device.
3.1:you can reboot your PC and press keyboard [F12],you can see boot device:[UEFI:Built-in EFI Shell],...
move to discussion since this is more likely your firmware issue than the stack. Feel free to provide minimal firmware (best with slightly modified stock example) to prove if it is the stack issue.
Also please attach your debug log as txt for readability.
The following definition would do it for your case without doing changes umpteen times across the whole usb driver file
If you looked closer you would see that it's not quite as simple as that, the register definitions are not compatible, that's why I created a local register definition.
I didn't complicate anything, the fundamental driver did not change, only the registers.
the interrups are also handled different in those families, thats why that was abstracted, I tried to a similar approach to the dwc2 driver to keep things consistent, it could have been kept all in the driver files if we wanted
and avoid snarky remarks like that, if it were so easy I wouldn't have gone through all this effort...
sorry guys, I am currently busy with other works and couldn't conduct any test and/or look into this. Though keep posting what you find, I will join in if I could spot anything suspicious
I am currently composing something, however, it would be nice to already have a working example of what should be done in the SOF isr. @geekbozu could you post a snippet here? @hathach i already implemented SOF for synopsis. I am aware that my implementation will not meet all your considerations but once i pushed it your are free to go to improve it! :)
I would like to update the feedback value within the audio class driver. For that, however, i need the cpu_cycle_count value at the time of the SOF interrupt. To be more precise, the cycly count of any master clock locked to the sample frequency. Most often, f_cpu is locked to f_s but it might be a different clock source as well. Is there a chance to introduce some callback function tud_get_master_clock_cycle_count() which need to be set from the user and i can call within the SOF interru...
I would like to update the feedback value within the audio class driver. For that, however, i need the
cpu_cycle_countvalue at the time of the SOF interrupt. To be more precise, the cycly count of any master clock locked to the sample frequency. Most often, f_cpu is locked to f_s but it might be a different clock source as well. Is there a chance to introduce some callback functiontud_get_master_clock_cycle_count()which need to be set from the user and i can call within the SOF inter...
I have picked up this pull request in my own fork, and successfully used it to read and write to a USB flash drive using a RP2040 in host mode. There is a full working example here: examples/host/msc_with_fatfs. However, it has an outstanding problem. If this could be resolved then we would have the ability to use standard USB flash drives from RP2040 boards.
The problem is that the USB hardware randomly fa...
@cursive bone If I haven't told you directly, thank you for doing this USB Host mode for the RP2040 PIO system - it will be wonderful.
I thought I'd point you at this discussion on the Pico-PIO-USB repository - do you happen to know what I screwed up? https://github.com/sekigon-gonnoc/Pico-PIO-USB/discussions/16

GitHub
I folks, First, thanks for this project. I am following it with interest because it may make for very interesting assistive technology project like the Intellikeys adapter with far fewer parts and ...
Describe the PR
- change API of tuh_control_xfer and its callback
- rename tuh_control_complete_cb_t to tuh_control_xfer_cb_t
- add user argument to control callback
- rework usbh enumeration process using user arg from control transfer as state
- add synchronous version of all get descriptor API
- update bare example to use sync API for string descriptor
- change order of index, language_id in tuh_descriptor_get_string() to
match similar API of libusb - add index to tuh_descript...
@geekbozu Thanks for the snippet! I need a few days extra to finalize the code. Thanks for the pacients ;)!
I would like to update the feedback value within the audio class driver. For that, however, i need the
cpu_cycle_countvalue at the time of the SOF interrupt. To be more precise, the cycly count of any master clock locked to the sample frequency. Most often, f_cpu is locked to f_s but it might be a different clock source as well. Is there a chance to introduce some callback functiontud_get_master_clock_cycle_count()which need to be set from the user and i can call within the SOF inter...
I would like to update the feedback value within the audio class driver. For that, however, i need the
cpu_cycle_countvalue at the time of the SOF interrupt. To be more precise, the cycly count of any master clock locked to the sample frequency. Most often, f_cpu is locked to f_s but it might be a different clock source as well. Is there a chance to introduce some callback functiontud_get_master_clock_cycle_count()which need to be set from the user and i can call within the SOF int...
If it is indeed an rtos error, I'm not sure where to start looking. If we don't get the interrupt because the system is blocking, how can we test for that? Any ideas?
Die you try the example without rtos?On 3/14/22, 21:32 kaspernyhus @.***> wrote:
If it is indeed an rtos error, I'm not sure where to start looking. If we don't get the interrupt because the system is blocking, how can we test for that? Any ideas?
—Reply to this email directly, view it on GitHub, or unsubscribe.Triage notifications on the go with GitHub Mobile for iOS or Android. You are receiving this because you commented.Message ID: @.***>
I've get myself a bit closer to function part of the code. I've continued in my own hcd driver for that STM and now it's cappable of getting full identification of the flash drive, its size and that's all for now. I'm bit confused, because all transfer seems correct but in attempt of reading from flash drive I'm receiving just missmash from the bus. There isnt any real data transfer nor control packets etc after identification.
I'm also done some refactorization of first 1/3 of the code so i...
should be fixed by #1397, there is lots of host improvement recently, there is probably minor issues, but I got my hub + keyboard + mouse running fine with stock example on pico. Feel free to re-open if it is still an issue
I'm not sure that I can use the esp32 without freertos? I think the second cpu can be configured to run without freertos, but I wouldn't know how to configure that using the tinyusb examples..
Mh i see... @HiFiPhile have you any experience with rtos and uac?
[hathach/tinyusb] New branch created: audio\_make\_dma\_ready
Describe the PR
Implement SOF ISR for audio driver and synopsis dwc2 driver. Still work in progress.
Additional context
This version is only a preview of what i am intending to do. The SOF interrupt is enabled and disabled by the audio driver in case an active alternative interface setting is set. The SOF ISR in the audio driver tries to calculate the 16.16 feedback value in order to avoid confronting the user with those details. The "only" thing the user needs to do is to provid...
I have been digging around in the dcd_esp32sx.c file trying to identify possible bottlenecks.
In the interrupt handler _dcd_int_handler I taken some timestamps to see if we got stuck somewhere - one at the top and one at the end:
__________________ name ______timestamp (us) ___ deltaT
I (8154) : 706: _dcd top 935207 1
I (8164) : 707: _dcd end 935213 6
I (8174) : 708: _dcd top 935222 9
I (8184) : 709: _dcd end 935226 ...Can you somehow measure the CPU load? If it is very high the mcu might Hang in some buggy loop, if the load is low there might be a missing interrupt flag... The error might be in the dcd ISO related transfer functions...On 3/15/22, 21:41 kaspernyhus @.***> wrote:
I have been digging around in the dcd_esp32sx.c file trying to identify possible bottlenecks. In the interrupt handler _dcd_int_handler I taken some timestamps to see if we got stuck somewhere - one at the t...
Can you profile how long the write functions for loading the data into the buffers last?On 3/15/22, 21:41 kaspernyhus @.***> wrote:
I have been digging around in the dcd_esp32sx.c file trying to identify possible bottlenecks. In the interrupt handler _dcd_int_handler I taken some timestamps to see if we got stuck somewhere - one at the top and one at the end: __________________ name ______timestamp (us) ___ deltaT
I (8154) : 706: _dcd top 935207 1
I...
What i pushed is work in progress and i wanted to share what i have so far. I added:
- SOF ISR routine in audio driver, in addition to the user SOF. The audio driver enables/disables SOF interrupt when needed. If no alternate setting is active, SOF is disabled. There is still some logic missing such that the disabling of the SOF interrupt is coordinated between the drivers (e.g. video and other iso related drivers) and the user. Currently, the driver would switch the ISR interrupt off alth...
Mh i see... @HiFiPhile have you any experience with rtos and uac?
I didn't use RTOS on SAME70 & LPC4322. I doubt there is some issue in esp-idf since personally I'm not impressed by it's robustness. (5-6 issues submitted in 2 weeks and more minor glitches)
Can you somehow measure the CPU load? If it is very high the mcu might Hang in some buggy loop, if the load is low there might be a missing interrupt flag... The error might be in the dcd ISO related transfer functions...>
My tracing shows that the cpu running the tud_task is mostly idle - the other cpu has only systicks. So cpu load is assumed to be quite low, right?
Can you profile how long the write functions for loading the data into the buffers last?>
tud_audio_write ?
Mh i see... @HiFiPhile have you any experience with rtos and uac?
I didn't use RTOS on SAME70 & LPC4322. I doubt there is some issue in esp-idf since personally I'm not impressed by it's robustness. (5-6 issues submitted in 2 weeks and more minor glitches)
I have contacted Espressif as well, and they just replyed they will provide me with a test example later this week !
Can you profile how long the write functions for loading the data into the buffers last?>
tud_audio_write?
I have measured the time between handle_epin_ints() and data filling in the buffer(dcd_edpt_xfer),It's much less than 1ms
I'll give this some attention soon! Looks way more robust then my current solution hah!
A gut reaction I have is setting the FB value on the USB stack is VERY costly todo in the ISR, and probably should be deferred to the task loop. I can re-evaluate this eventually as well. I remember having "issues" with it eating up to much CPU time on my application.
Rational: I don't have much left for USB, my variant of the SOF interrupt is eating about 10% of my CPU time after overheads are accoun...
@geekbozu Thanks for the first remarks! Just for conformation: do you mean the calculation of the feedback value within the SOF ISR is too costly or the setting of the feedback value by use of the tud_audio_n_fb_set() function? I thought calculating and setting the feedback value in the SOF ISR was the very point of this pull request? This was the key question in #1231 in order to reduce the jitter. There are a number of possibilities now:
- The MCU is fast enough to conduct everything w...
No problem,
Calculation is to be done in the ISR, that's not really that concern. I would not be shocked entering the ISR is more expensive then the actual math involved. :P
My concern is tud_audio_n_fb_set() which calls into the USB stack and queues up packets and such, sometimes.
That particular call is what I'm afraid of.
It needs testing.
I know in my application the overhead of calli...
[hathach/tinyusb] New comment on pull request #1290: usb host: Add support for multi\-level USB Hubs
No problem at all, I noticed you have done some good work on usb host stack recently so this will be worth rebasing against that.
Ill try do that as soon as i can
[hathach/tinyusb] New comment on pull request #1290: usb host: Add support for multi\-level USB Hubs
yeah, I am reworking the host API to make it more like libusb style with addition to generic endpoint transfer. It is more useful as usb backend to micropython/circuitpyhon which can change application quickly. The class specific driver is still accessible and easier for project with embedded C.
There is still more to come, we will revisit it when it is all stable.
@geekbozu No worries, i think these a fruitful discussions here :). I had some thougth about the possible bottle necks. As for the math calcuations i found that in case of power of two shifts 1 cycle for computation will be needed and in case a FPU is available, 3 cycles will be needed. If non is present, then what i currently pushed can be used i.e. roughly 20 cycles. So i guess the computation should not be a concern. I will put the required logic into the next push.
Regarding `tud_audio_n...
Could you monitor the corresponding interrupt enable registers sucht that you can say if it gets disabled at some point? Maybe by placing a breakpoint which hits when the register flag gets changed?
@geekbozu No worries, i think these a fruitful discussions here :). I had some thougth about the possible bottle necks. As for the math calcuations i found that in case of power of two shifts 1 cycle for computation will be needed and in case a FPU is available, 3 cycles will be needed. If non is present, then what i currently pushed can be used i.e. roughly 20 cycles. So i guess the computation should not be a concern. I will put the required logic into the next push. Regarding `tud_audio_...
@PanRe sorry for keeping you waiting, I have been working on host stack lately. will check this out in a couple of days or so :).
Describe the PR
- More major changes for host stack transfer, include support for generic endpoint transfer.
- tuh_control_xfer(), tuh_edpt_xfer() and callback follow similar API with 1 unique tuh_xfer_t following the libusb convention https://libusb.sourceforge.io/api-1.0/group__libusb__syncio.html
- required
CFG_TUH_API_EDPT_XFER=1since it requires 8 more bytes per endpoint - does not requires to alloc or keep the xfer struct memory lasting for transfer to complete (usbh will...
- required
Ok, the pushed verions would be ready for testing. All that needs to be done is to enable SOF ISR feedback calculation and the desired calculation mode by setting (your parameter are suitable for a power of two shift, but you may try all three)
#define CFG_TUD_AUDIO_ENABLE_FEEDBACK_DETERMINATION_WITHIN_SOF_ISR 1
#define CFG_TUD_AUDIO_ENABLE_FEEDBACK_DETERMINATION_MODE CFG_TUD_AUDIO_ENABLE_FEEDBACK_DETERMINATION_MODE_POWER_OF_TWO_SHIFT
The parameters required for calculation of the...
I'm sorry, I didn't find at https://www.espressif.com/sites/default/files/documentation/esp32-s3_technical_reference_manual_en.pdf relevant introduction of the usb register, but I did an experiment, in the hid device 1ms to send out a data, is can produce the corresponding interrupt signal ,I wonder if it has something to do with endpoint initialization or configuration, but I don't know how to verify this
Why not use the symbol name SYSCFG_b as defined in renesas.h .
The register definitions are very similar to those generated by SVDConv with --fields=struct.
This indentations may be typos.
was an effort to keep it vaguely similar to what was present before and readable, but in hindsight, the standard is better, will fix
yes, the formatter I'm using (clang-format) doesnt like those
@perigoso
Thank you for your great work!
If possible, could you please keep the indentation of link_dcd.c and link_hcd.c? I would like to see differences other than indentation and symbol names, but it is difficult, I seem to miss them. I don't mind changing the indentation, but would you separate the pull requests.
Thanks for this fix.
Without USB HUB the keyboard LEDs will turn on using:
static uint8_t value = 7;
tuh_hid_set_report(keyboard_dev_addr, keyboard_instance, 0, HID_REPORT_TYPE_OUTPUT, (void*)&value, 1);
With USB hub the LEDs will not turn on with the code above. What can I do to control the LEDs through a USB hub?
Hm, that might be hard the way i did the commits, i kind of messed up, if you at the rename commit for instance you'll see what i mean
I'll try to redo this more cleanly when i find some time
@perigoso
I see. Could you share the settings file for clang-format? I will temporarily apply it to master branch, and try to generate diff file except indentation changes.
Describe the PR
Add initial driver/port for the CH32V307 series from WCH. This is a RISCV (rv32imac) with integrated High Speed USB PHY.
The targets the WCH development board CH32V307V-R1-1v0, which is a lowish cost ~$10 board from LCSC.
Additional context
The xpack-riscv-gcc compiler is used. The official wch packaged gcc appears to have some custom changes to support the interrupt controller in this part that handles hw stack save/restore. Fortunately that's reasonably eas...
rebased everything, now there should be no style changes.
It was quite a bit of work to redo everything properly but it was worth it
hopefully nothing broke, but I tested cdc_msc and cdc_dual_ports and they behaved as expected so I think I'm good.
nice :+1: I was thinking of looking into getting that device to work with tusb
Look info the device controler driver file tinyusb/src/portable/espressif/esp32sx/dcd_esp32sx.c. The registers are set within dcd_edpt_open().Check if the registers are correctly set for the ISO endpoint!On 3/21/22, 06:38 LiTongXue98 @.***> wrote:
I'm sorry, I didn't find at https://www.espressif.com/sites/default/files/documentation/esp32-s3_technical_reference_manual_en.pdf relevant introduction of the usb register, but I did an experiment, in the hid device 1ms to ...
why the AT>FLASH here?
I'm not sure. I think it's redundant because both sections are the same.
Apart from the change to the stack size, needed for examples to run, this is just as supplied by the vendor examples.
I see, yeah it's redundant here, hence the question
could you add a build workflow for this?
see https://github.com/hathach/tinyusb/blob/master/.github/workflows/build_riscv.yml
Added. I think just adding to the family will be enough?
But I think they won't run unless a maintainer approves them to run.
Yes, i think so. I can approve.
you need to add the family to the skip files on freertos examples if you don't have the freertos port configured
examples/device/hid_composite_freertos/skip
examples/device/cdc_msc_freertos/skip
What are these commented out registers? maybe remove the Chinese comments or get a translation if they're important
What are these commented out registers? maybe remove the Chinese comments or get a translation if they're important
There's a TU_ATTR_ALIGNED(Bytes) not sure what's the policy but maybe it would be better for consistency with the rest of the code base
There's a TU_ATTR_ALIGNED(Bytes) not sure what's the policy but maybe it would be better for consistency with the rest of the code base
Shouldn't this be behing the BOARD_DEVICE_RHPORT_SPEED variable?
Shouldn't this be behing the BOARD_DEVICE_RHPORT_SPEED variable?
shouldn't this be 16 like the driver?
shouldn't this be 16 like the driver?
looks good overall, only missing the docs, but that can be added after
Just for easier reference, you mention initial driver, what is missing currently?
It's a duplicate of Table 21-3 Endpoint n buffer mode from the Reference Manual. I will transcribe the comments from the English Manual.
I've just tested, and the device doesn't correctly enumerate when set to Full Speed mode.
Something to look into, as a placeholder I'll have it throw an error if BOARD_DEVICE_RHPORT_SPEED==OPT_MODE_FULL_SPEED
I've not tested with a Full Speed only host/hub.
Which I think will be the same as trying to configure the device as Full Speed only. Which should work, but does not appear to right now.
- Only supports bulk endpoints.
- Only supports device mode.
- No host mode.
I've also not done extensive testing yet, I've only had the dev board for <1week.
@perigoso
Thank you very much for your work! It is very helpful for me to review changes.
I will test this PR on my boards.
leave the host blank, since it's just not implemented, not explicitly not supported
Looks good to me, let's wait for @hathach to look at this
I think this project could really benefit from a Hardware In The Loop setup (think of it like a workflow to test the code, but with actual hardware)
There's a lot that goes into this, just leaving this here for documentation and future discussion
Current code did not prevent race condition if transfer was
started from non-usb interrupt.
testing and modifying dma_running flag was not nested-interrupt-proof.
Describe the PR
This uses standard C library atomic functions to access dma_running flag.
For Cortex-M4 (NRF52) and Cortex-M33 (NRF53) compiler generates code
that uses LDREX/STREX instructions along with memory barriers.
Additional context
Issue was detected during BLE throughput tests that also stressed USB.
I...
I'm very eager to help bugfix this, but I'm also not at all sure what to look for.
Here is a probing of the USB0.gintsts register when it enters the _dcd_int_handler
I (3246) : USB0.gintsts: 0x00040020 47
I (3256) : USB0.gintsts: 0x00008038 1248
I (3256) : USB0.gintsts: 0x00000030 15
I (3266) : USB0.gintsts: 0x00080020 2
I (3266) : USB0.gintsts: 0x00040020 18
I (3276) : USB0.gintsts: 0x00040020 34
I (...I should also mention. The CH32V307 has 2 separate USB interfaces/peripherals, One is FS/OTG and then one is HS/FS/Device/Host. These use different pins on the device, and have completely different register sets.
This port is only targeting the High Speed peripheral.
The CH32V307 USB FS/OTG interface looks to be identical to, or else very
very similar to, the STM32 USB FS/OTG interface on e.g. the STM32F103, so
it would probably be fairly simple to add support. (I know, easy for me to
say.) There are also STM32 parts that have basically the same dual USB (FS
& HS) as the CH32V307.
On Tue, Mar 22, 2022 at 6:09 PM Greg Davill @.***>
wrote:
I should also mention. The CH32V307 has 2 separate USB
interfaces/peripherals, One is FS/OTG and then one i...
sounds like it might have a synopsys usb core, very popular among MCUs, it might be compatible with the dwc2 driver?
(I'm just curious why this fix was needed in the first place- it looks fine to me)
What was the code generated for setting/clearing dma_running originally, and why did it cause a race? Does a non-atomic bool on ARM require more than one insn (one to generate the constant, another to do the store)?
@cr1901 thanks for asking now that I looked again there is just one line to be removed and then it will be clear.
Problem with current code is that place that checks whether dma is currently running is separated from place that sets this flag.
It takes some measures to ensure that change and check is consistent but when we have two interrupts involved checking in interrupt that dma is not running is not enough since after check another interrupt can check again if dma is running and can see...
@kasjer Thank you for the clarification, now it makes sense :D!
Well, according to the manual on page 602, the interrupt for the IN EP is always set (bit 18). Unfortunately, the manual does not tell the meaning of the other bits. Can you also check for the masking register USB_GINTSTS_REG and SB_GLBLINTRMSK. In this registers you can check if the interrupt was masked out. Furthermore, please check USB_DAINT_REG to check the number of the EP int...
I've been digging into this a tad more, there is actually 4 different USB peripherals in the CH32FV32x_V3x Reference manual.
USBDLooks compatible with the STMF103, WCH have a CortexM3 device that is pin compatible with the F103USBHDRegister equivalent to theUSBHSbut FS only.USBHSThis port, Host/Device with integrated HS PHY.OTG_FS/USB_OTGDoesn't match the STM32's USB peripheral.
Config summary
| | V203 | V303 | V305* | V307 | V208 |
...
eit, thats a bit of a mess, lets not worry too much for now then.
to clarify, does USBHS in any way look compatible with the STMF103 usb registers?
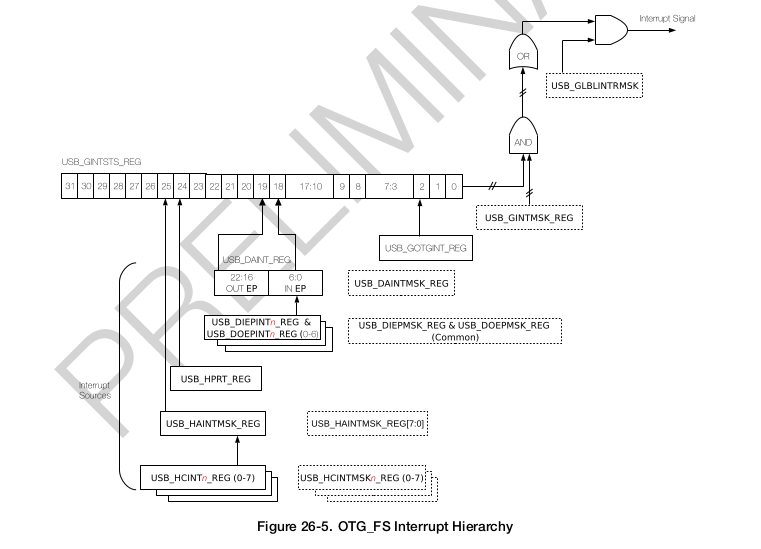
Yes, this part of the documentation leaves a bit to be desired.
Here is another run:
I (5281) : -------------------------------------------------
I (5281) : USB0.gintsts: 0x00040020 32
I (5291) : USB0.gintmsk: 0x208C3C16 1
I (5291) : int_status : 0x00040000 1
I (5301) : daint : 0x00000001 2
I (5301) : ...No worries at all! I hope you are well soon! Take care :)!On 3/24/22, 19:23 Ha Thach @.***> wrote:
@PanRe sorry for keeping you waiting again, I have spent last 2 day with sleep-eat cycle in high fever due to covid-19. I feel much better now, but will take a couple more day to rest, I was in the middle of reviewing this PR before that, but It is kind of erased now. I will start to look at this again next week or so. Thanks.
—Reply to this email directly, view it on...
Take all the time you need. Glad to hear you're starting to feel better.
There is no rush on getting this merged on my end.
On Thu, Mar 24, 2022, 06:55 Rafael Silva @.***> wrote:
to clarify, does USBHS in any way look compatible with the STMF103 usb
registers?
I don't think so. Judging by a somewhat cursory comparison of the CH32V307
docs to various ST docs:
The CH32V307 USBHS looks like the USBHS on the bigger/newer STM32 parts.
AFAIK it doesn't look like any STM32 USBFS controller.
The CH32V307 USBFS looks like the STM32F103 (and many other STM32) USBFS.
Some STM32 have both, in the same way the CH32...
The CH32V307 USBFS looks like the STM32F103 (and many other STM32) USBFS.
I agree with this, I suspect since WCH has already used this IP on it's STM32 replacements it makes sense.
The CH32V307 USBHS looks like the USBHS on the bigger/newer STM32 parts.
AFAIK it doesn't look like any STM32 USBFS controller.
Some STM32 have both, in the same way the CH32V307 has both. I think
STM32F205 or STM32F207 have both, but I haven't double-checked.
Looking through the STM32F207 Ref...
any updates or comments?
[hathach/tinyusb] Issue opened: #1408 \_\_pycache\_\_ directory committed, probably not intentional?
Operating System
Linux
Board
Any
Firmware
Haven't compiled yet.
What happened ?
When cleaning up generated pycache directories from esp-idf repository tree I've noticed that the tinyusb submodule becomes "dirty" (modified) from git perspective. Turns out that tinyusb includes a Python bytecode file at hw/mcu/sony/cxd56/tools/pycache/xmodem.cpython-36.pyc. Python bytecode files are usually considered to be local, temporary ...
[hathach/tinyusb] New branch created: remove\-pycache
Describe the PR
fix #1408 remove unintended pycache folder
thank @perigoso for helping with the PR so far. @gregdavill I took a quick look at ch32v307
- USBD (FS) is exactly like the stm32 fsdev
- USBHS D/H on the other hand is completely new to me, and definitely not dwc2. Therefore we are good with current file structure.
I still haven't looked at actual code changes, will do that later on.
Can someone help me get started building a proprietary device emulator? (Not HID or any other documented standard). I'm having trouble finding examples on doing just this.
I'm a noob trying to build a USB device emulator and can't find any documentation on this :(
@PanRe reviewed the changes, everything look ok. To be honest, though I don't quite understand the feedback computation, I don't think that we could implement one-fit-all computation for feedback. also, required an pointer-to-cycle may not work on other platform.
In my opinion, it is just better to invoke user isr callback and let application to do the computation itself. Since this is most often got tweaked to specific application. We can provide some compute helper, with nominal value et...
I thought about this long time ago, but couldn't manage time to do so. We can write a python script to run on a pi4 to deploy and test much like production tester
- to flash example and test if new firwmare run OK like Serial,MSC is enumerated correctly.
- #1059 USBCV auto test would be great, unfortunately, the suite only runs on windows which is hard to automate and script, but also cost more in electricity bill.
Currently tinyusb supports too many platforms, we probably only pick up...
@jeroentaverne that is a different issue, please open an new issue with detailed information to reproduce, also include your hub info, and keyboard info with its configuration and report descriptor (when plugged in PC).
This is something I would love to play with, there's a personal project that could benefit from a similar system, unfortuantely I don't have that much time either, but this is something we can gradually build.
It's unfortunate USBCV is windows, didn't realise it, it would be one of the more useful things we could use this for. maybe making a similar test tool might be feasible, provided someone finds time to do it.
thank @kasjer very much, I actually tried something similar previously with exactly atomic_bool, and expect compiler to generate LDEX/STREX. But somehow I failed mysteriously :face_with_head_bandage: and didn't have the time to investigate. Since I really need to fix the race and switch works. I am glad that finally you could address this, could you share how to do the ble throughput test so that I could help
PS: hmm, last time I try to use atomic to also replace mutex as well, do you thin...
@kkitayam did you ever get to test this? not in a rush or trying to pressure, just eager
@kasjer Thank you for the clarification, now it makes sense :D!
LDEX/STREX on M3+ is noisr-free to achieve mutex on multiple cores or preempted RTOS. Other methods are often resourced to disable_isr() to get mutex. Note atomic bool on unsupported MCU such as M0 will cause disable_isr(). But what do I know, I failed miserably last time I tried to apply it exactly this :smile:
@hathach I think that it's possible that edpt_dma_start() could be reduced to
static void edpt_dma_start(volatile uint32_t* reg_startep)
{
if (atomic_flag_test_and_set(&_dcd.dma_running))
{
//use usbd task to defer later
usbd_defer_func((osal_task_func_t) edpt_dma_start, (void*) (uintptr_t) reg_startep, true);
}else
{
start_dma(reg_startep);
}
}
...deferring DMA start in every case that DMA seems to be still running.
There was stil...
@kasjer I remembered doing exactly just that and also apply for the thread-mode case as well , but it did not work out.
However, there are a few race fixed since then. It could have been caused by other bugs and/or I made my own mistakes. I would love to have the tests, however, if it is too troublesome, don't worry I figure out my way by pulling out one of p...
update: I just ordered ch32v307 / v103 to test with this PR, since they are interested mcu. Interestingly, wch also has one ch595 with USB 3.0 but with rather limited ram/rom but its dev board is not available. Looking forward to test this out.
It is an interesting chip indeed, I have a couple on the cart waiting for an order
There is a dev board you can find on aliexpress, it's not very affordable but it's an option
https://aliexpress.com/item/1005003617496688.html
What would need to be done on the usb stack side to get usb 3.0? enumeration is still done on the usb 2.0 right?
The technical director at WCH is also very open, you can contact him through twitter maybe they could even send you one @hathach
It is an interesting chip indeed, I have a couple on the cart waiting for an order
There is a dev board you can find on aliexpress, it's not very affordable but it's an option https://aliexpress.com/item/1005003617496688.html
yeah, I saw that board as well, but I will wait for a cheaper option. I won't have time to do anything with it anything soon.
What would need to be done on the usb stack side to get usb 3.0? enumeration is still done on the usb 2.0 right?
hard to tel...
Oh i wasn't trying to bundle the ch595 on here at all, just a suggestion
I'm planing to poke around with the ch565/ch569 at some point too. Have some of the ICs.
Let me know when you get your CH32V307 devkit. Loading firmware currently requires the use of a "patched" openOCD, which can be downloaded as part of the MounRiver Toolchain (http://www.mounriver.com/download). I hope that eventually support for the WCH-Link and this IC are upstreamed into openOCD.
Oh i wasn't trying to bundle the ch569 on here at all, just a suggestion for a possible way of getting a dev board, since you were interested
thanks for your suggestion.
I'm planing to poke around with the ch565/ch569 at some point too. Have some of the ICs.
Let me know when you get your CH32V307 devkit. Loading firmware currently requires the use of a "patched" openOCD, which can be downloaded as part of the MounRiver Toolchain (http://www.mounriver.com/download). I hope tha...
Is this essentially a job for Espressif to fix, since it seems to be quite deep down in the handling of interrupts?
@hathach Thanks for the review! Well, the feedback value computation follows the official USB specification. IMHO, the specification is not written very clear and may cause a lot of frustration for the user to implement (especially for new users). What i came up with aims to support those poor souls by providing a framework which should be applicable in many cases.
Boild down, the feedback value is n_samples per frame i.e. fb = n_s / frame. The feedback value must be accurate up to 1 sa...
when the 2ms delay starts USB0.in_ep_reg[1].diepint is oscillating between 0x80/0x81 - what does that mean??
I guess the interrupt flag is not cleared. The error may be in the functionhandle_epin_ints()as there these flags are cleared. Or this function does not get called every second time?!
Is this essentially a job for Espressif to fix, since it seems to be quite deep down in the handling of interrupts?
I guess yes, the device controlerdcd_esp32sx.cwas also written by Espre...
Something happened and the docs builds are now failling.
I don't think it's related to anything on our side, probably just an upstream update that broke something, let's wait to see if it fixes itself.
/home/docs/checkouts/readthedocs.org/user_builds/tinyusb/envs/1381/bin/python -m sphinx -T -E -b html -d _build/doctrees -D language=en . _build/html
Traceback (most recent call last):
File "/home/docs/.pyenv/versions/3.8.6/lib/python3.8/runpy.py", line 194, in _run_module_as_ma...I will trigger rebuild to see if it would fix.
@PanRe I still think check I2S buffer count is the most reliable way for feedback calculation, due to MCLK measurement error with a timer and error accumulation over time.
Beside with a high frequency MCLK it's hard to get it's exact value. I believe the calculation method in UAC spec fit better the case of ASIC, where the MCLK/USB clock relationship can be calculated by hardware directly.
One thing which is not very clear right now are those "magic" rules to tweak the feedback value. I...
thank you @PanRe for a very in-depth explanation, For clarification, I just added the bracket for the formula (please correct if I get it wrong).
fb = (n_cycles / n_frames) * (f_s / f_m)
I have no doubt that will enormously help lots of other audio newbie including me. My point is that, we don't have to compute it internally within the audio driver, making it difficult for user that want to adjust/tweak the feedback value since any correction will require PR and could affect...
sorry, I haven't actually got the time to look at this. The bug look easy to reproduce though I am not also too familiar with MP. I will try it out when having time. Meanwhile please try to bump up tinyusb, pico-sdk, mp to see if that helps.
Sorry for the late reply. Not yet tested.
It's a typo.
#if CFG_TUH_ENABLED && (CFG_TUSB_MCU == OPT_MCU_RX63X || \
@HiFiPhile Thanks a lot! I will have a look into it! I am completely aware, that you have the most experience with audio speakers of us and i value your opinion a lot. It is just that @vmilea and @geekbozu voted for the SOF option and since they made this approach work already i thought it would be a good idea to incorporate that into the audio driver. This would save us some PR in the future too. As for the precision (please tell me if i am wrong on this) i thought the only sensitive part is...
Describe the PR
draft PR for pio host, mostly for keeping track of changed files.
ah, that fixed the rx build, wonderful! thank you
hoping that means everything still works in hardware
I have tested following device examples on RX65N target board with WIndows 10.
| example | result | note |
|---|---|---|
| cdc_msc | ✔️ | |
| cdc_dual_ports | ✔️ | |
| cdc_msc_freertos | ❌ | Enumeration failed |
| hid_composite | ❌ | Enumeration OK, but the behavior is not correct. |
| msc_dual_lun | ✔️ | |
| net_lwip_webserver | ❌ | Enumeration probably OK, but the behavior is not correct. |
| uac2_headset | ❌ | Enum... |
jinja2 updated to 3.1.0 / 3.1.1 a couple days ago, which explains the breakage, I think we can force a version, I will try it out.
jinja2 updated to 3.1.0 / 3.1.1 which broke the docs, fix it to a known working version
Typo
cfg |= (LINK_REG_PIPECFG_TYPE_ISO | LINK_REG_PIPECFG_DBLB_Msk);
Typo
cfg |= LINK_REG_PIPECFG_TYPE_INT;
It is just that @vmilea and @geekbozu voted for the SOF option and since they made this approach work already i thought it would be a good idea to incorporate that into the audio driver.
Yes as you said it's a good idea to have something that should be work in most cases.
My idea here would be to use a DMA which copies the counter register value to some variable from where audiod_sof() can read it.
It's rather a hardware question, let's take an example of 72MHz STM32F1 & 12.28...
cfg |= LINK_REG_PIPECFG_TYPE_ISO | LINK_REG_PIPECFG_DBLB_Msk;
cfg |= LINK_REG_PIPECFG_TYPE_INT;
@perigoso
Thanks for updating! I have confirmed that these examples work fine except cdc_msc_freertos.
Also, I confirmed that cdc_msc_freertos didn't work at the HEAD of the master branch either. So, this issue is not caused by this PR.
The host driver will test at a later date.
Actually true, after some research i also did not find the possiblity to trigger a DMA from a SOF interrupt signal... sorry i was too enthusiastic ^^. Regarding the timer, yes i had your second version the counter mode in my mind. A constant delay from the SOF interrupt to reading the counter value within the ISR would not be a problem iff it keeps constant from interrupt to interrupt. The SOF interrupt therefore should have a high priority such that the reading is "precise" as you said.
W...
Yes the brackets are corret. As for your idea, it appears a bit "split up" to me, leaving one half of the compuation in the driver and the other half in the user isr. Would it not be ok to declare audiod_sof() and tud_audio_set_fb_params() as weak and give the user the possiblity to copy and paste the code from the driver into his own files and change it to his needs? This way he can change everything if he wants.
@PanRe uh hmm, why would it result in "split up", the application could co...
@hathach Ah... sorry i guess i missunderstood your idea. Well, if you think this is better then of course. I had this idea in my head to avoid too many callback functions to keep the ISR as short as possible. But sure, would you commit such a PR?
@hathach Ah... sorry i guess i missunderstood your idea. Well, if you think this is better then of course. I had this idea in my head to avoid too many callback functions to keep the ISR as short as possible. But sure, would you commit such a PR?
will do, will make necessary changes soon enough.
👍 thanks for testing!
sorry, I haven't actually got the time to look at this. The bug look easy to reproduce though I am not also too familiar with MP. I will try it out when having time
No problem. I think the direction at the moment is to merge https://github.com/micropython/micropython/pull/8040 once the reviews are done.
Yet I'm still curious if there is anything that we have overlooked... so if you find some time to look into it would be greatly appreciated. Especially since it doesn't seem to be rel...
Operating System
Windows 10
Board
new MCU port from pic32mz
Firmware
cdc_msc demo
What happened ?
the second CBW , bulk out EP got 62 bytes
How to reproduce ?
dcd_pic32mz.c: line 565
after xfer_complete(xfer, XFER_RESULT_SUCCESS, true);
add xfer->transferred = 0;
Debug Log as txt file
No response
Screenshots
No response
please be specific on the MCU, what is your exact MCU and board. Also provide your LOG=2 as attached txt as well.
The host driver will test at a later date.
I confirmed that cdc_msc_hid works with a low-speed mouse and a super-speed USB HUB.
@Wini-Buh
If you don't mind, could you comment in terms of big-endian or CCRX?
Operating System
Windows 10
Board
Raspberry pi pico
Firmware
examples/device/hid_multiple_interface
What happened ?
- Put windows10 to sleep, and confirm RPi pico is suspended (Slow LED blink pattern)
- Wake up windows10 by pressing button on RPi pico
- windows10 wake up, but RPi pico is still suspended (Slow LED blink, No HID report is sent)
This is because DCD_EVENT_RESUME does not occurs after remote wakeup, and _usbd_dev.suspended is not cleared.
As the name...
Is your feature request related to a problem? Please describe.
Hi, I'm trying to use an rp2040 to create an hardware project which uses CTS and DSR lines.
I see the current CDC code doesn't support them.
Describe the solution you'd like
I'd like to know how to implement CTS and DSR control in tinyusb.
I'm also able to read DTR, but RTS is not update. Host is Windows 11.
Thanks
HID is working fine in my case. MSC is giving the same error in my case, even after building with "release". Please help how to solve it.
to speed up the support, do you know
- on PC host, which API is used to get cts and dsr, preferably with python script
- And which CDC-ACM request that host issue when (1) is called to get CTS and DSR from device
thanks for detail report on the issue. We shouldn't submit DCD_EVENT_RESUME right after remote_wakeup() since device need to keep the RESUME signal for at least 1 ms, and host needs at least several ms more. Ideally DCD_EVENT_RESUME should only submitted when bus is fully already in operating state. I will poke around the rp2040 datasheet to see what is best way to detect this.
Hi, I don't have those information. I'm using comtestserial to interact with the CDC port. I had success moving DSR with this function:
void set_dsr(uint8_t itf, bool value) {
cdcd_interface_t* p_cdc = &_cdcd_itf[itf];
uint8_t packet[10];
packet[0] = 0xA1; // bmRequestType
packet[1] = CDC_NOTIF_SERIAL_STATE; // bNotification
packet[2] = 0x00; // wValue
packet[3] = 0x00;
packet[4...thanks for info, though it doesn't answer the 1st question, which script/API you run on windows to get CTS DSR state
On Windows 10/11 I open this software to read the serial port state:
https://www.microridge.com/comtestserial.htm
Thanks, I don't use windows, but I could give it a try on my VM when I have the time to work on this later on.
Thanks, I can try something on Linux and OSX to verify my code, which platform are you working on?
@kkitayam
I had a look into the code and did a quick test with the CCRX toolchain in big and little endian mode. After doing the quick hacks on the code (add the correct #pragma directive and add __evenaccess keyword, see the description below), the CDC test was successful.
Unfortunately the code as it is, is not endian independent. For the CCRX we could solve this with a #pragma directive. But to be more independent of the toolchain (and invest into the future), we could use so...
@Wini-Buh
Thank you very much for testing and useful comments! I understood we need more modifications to work with gcc for big-endian.
My understanding for the current implementation (dcd_usba) of master branch, it supports big-endian with only CCRX. Because of using TU_ATTR_BIT_FIELD_ORDER_BEGIN for endianness. It is a #pragma. Is this correct?
I think i...
my ch32v307 dev board has arrived, however, I am currently busy catching up with paid work and won't probably look at this pr this week. I will try my best to review this as soon as I could. Please be patient.
Operating System
Windows 10
Board
STM32 F4
Firmware
sample/device/cdc
What happened ?
tusb_compiler.h中 #error "Compiler attribute porting is required"
How to reproduce ?
Project in CubeIDE After copying TinyUSB related source code to MDK project, the above error is displayed
Debug Log as txt file
No response
Screenshots
No response
It is a problem with the compile-time toolchain. CubeIDE is GCC, MDK is internal AC5, and the problem occurs when using AC5.
@kkitayam
My understanding for the current implementation (
dcd_usba) of master branch, it supports big-endian with only CCRX. Because of using TU_ATTR_BIT_FIELD_ORDER_BEGIN for endianness. It is a#pragma. Is this correct?
Yes
I think it is better to keep the features that the current implementation of master branch has. So, we should keep support big-e...
If i understood correctly commit a6139eddc113238b78ff576430682317ee6b925b is all that was needed?
if so this PR is ready, I would just like the good to go from @hathach (I understand you are busy right now, don't worry)
Is your feature request related to a problem? Please describe.
Feature request.
I was looking at Adafruit's TinyUSB Arduino library and one thing I noticed is despite the Arduino part is in C++, handling control packets within a e.g. protocol class for HID is a pain because passing C++ method as a C function pointer is not straightforward. The current construction more or less assumes the class needs to have a (effectively) singleton object and the object reference can be passed either...
can you give example to elaborate the issue.
One example would be https://github.com/adafruit/Adafruit_TinyUSB_Arduino/blob/master/src/arduino/hid/Adafruit_USBD_HID.cpp
But not looking at it closely, I think it's probably just because of how it's coded to use the USB hardware for HID only, instead of allowing adding/removing protocol handlers, and that the callback names are actually hardcoded in tinyusb and not set by the user.
For the goal I described above I think it would need more code to achieve, and that code will likely not re...
Describe the PR
This adds a meson build file that exports a dependecy for use in projects using the meson build buildsystem
This is just for convenience of said projects and won't be used internally, in the future it might be worth considering switching to meson to build the examples too, as it's much easier to maintain than make
As for know projects that will benefit from this, that I know of, icebreaker, that is being...
We might want to switch to a more modern and friendly buildsystem, as the make we have is becoming unwieldy
This is is something I'm willing to work on myself, not wanting to add more burden
until then this serves as a reminder and discussion
This looks handy when making use of tinyusb in a meson based project!
Why are you repeatedly comparing against OPT_MCU_NONE?
This meson.build file doesn't have a project() declaration -- is it supposed to be used as a https://mesonbuild.com/Subprojects.html or what?
I'm comparing against OPT_MCU_NONE because it's not done lol
not sure making this a subproject is the best approach, it's not really meant to be compiled as a library, and it needs an external configuration file, which is doable, but i usually just subdir() this file where it declares a dependency and use that in the main project
but this is which I made a draft
I would like to finalize this PR so i have taken the liberty to introduce the desired changes of @hathach. After some thinking i came to the conclusion, that the easiest most convenient way would be to have 3 options:
- no SOF and feedback calculation done by user (default as done all the time)
- SOF and feedback value calculation within the audio driver (my approach - nice for rapid prototyping and evaluation if it could work)
- SOF and feedback value calcuation by the user (as desired by...
Operating System
Linux
Board
Raspberry Pi Pico
Firmware
Custom CDC class extension to support notify (similar to HID class reports) and mount/umount callbacks. The hardware is a Telit LE910C1 LTE module that interfaces via "CDC" interfaces over USB, although they aren't quite CDC, they are 99% (class is vendor and no data interface, just two extra endpoints instead.
telit_driver.zip
)
What happened ?
...
Turns out the USB device has more endpoints than ep2drv had reserved and there is no ASSERT() to check this! Which in turn caused an out of bounds write!
Started to look at this again, unfortunately, the USB cores are very similar, but just different enough to make it quite hard to make compatible, so I just forked the original samx7x driver and made the necessary changes.
I simply translated as best I could the register from the samx7x to the 3u, but there are a couple features that apparently have slightly different implementations, so I don't believe this is going to work out of the box.
also unfortunately, I don't have any boards wit...
cmsis PR:
hathach/microchip_driver#9
Board driver is a todo
also unfortunately, I don't have any boards with this MCU assembled at the moment. @hathach did you ever get the SAM3U development board?
I got the board, and would love to help but I am way behind my work schedule now, and couldn't have the time. I will revisit this whenever I could.
Operating System
MacOS
Board
ESP32-S3-DevKitC-1
Firmware
Custom, with only few changes.
What happened ?
Every single hid example seems to declare no Interrupt OUT pipe so devices like keyboards retrieve host control data from the control pipe. I made it to have an Interrupt OUT pipe and the host PC do leave the control pipe sending instructions (NumLock, CapsLock etc.)
However when I try to retrieve these using tud_hid_set_report_cb(), the data is not as expect...
I understand, i the meantime I'll try to assemble some boards with it
@HiFiPhile you think you could take a look? I am certain there are things that beed to be done differently, i recall a couple flags to trigger things in the endpoints status register are very different, i did a naive translation so far
Operating System
Windows 10
Board
NUCLEO-STM32H723ZG
Firmware
Any firmware
What happened ?
The STM32H7 family have 2 sub families:
- H74x and H75x have 2 USB, and USB2 have an internal FS PHY. No problem with this sub family.
- H72x, H73x, H7Ax, H7Bx have only 1 USB named USB1 with an internal FS PHY (this USB1 is equivalent to the USB2 of the other sub family). And in the CMSIS files of this sub family the values USB_OTG_FS_PERIPH_BASE and OTG_FS_IRQn are not decla...
Added descriptive strings for edpt_dir and edpt_type for debug output use rather than ports having to define their own.
Add support for BULK endpoint transfers. This is achieved by allocating hw_endpoint for bulk transfers, not just interrupt. These endpoints can perform transfers in a non-blocking manner, whereas using EPx would block all other (non interrupt) transfers.
This change also allows interrupt transfers in both IN and OUT directions now.
@HiFiPhile you think you could take a look?
Yes I could help you if you are going to do some testing, but I haven't used sam3u so my assumption won't be accurate :)
Ah right, 16 is probably a better default value, this is mainly for mcu with lack of memory. I will change that and add assert as well.
Thanks for the report, though the bug should be exactly reproduced, can you
- Provide link to modified example that can be compiled to flash to reproduce the issue
- Which steps that you do on host pc to cause the issue
- “The data is not as expected” is not analyzable, can you provide the expected vs the actual data (contents of those variables in the callback)
- Attach debug log as txt file for analysis
@PanRe sorry, I am currently way behind my work schedule, I will check this out asap. Sorry for the delay.
Could you mind making an PR for this change, since I don’t have this board to verify the change.
- https://github.com/Huckies/tinyusb-bugreport I do the minimal modification on example
hid_boot_interfaceto reproduce this. All I did was adding an Interrupt OUT endpoint to the keyboard interface and left everything else 'as is'. - Press 'NumLock', 'CapsLock' or 'ScrollLock'
- I expected to have
instance=0 report_id=0 report_type=HID_REPORT_TYPE_OUTPUT(aka 2)in callback ```void tud_hid_set_report_cb(uint8_t instance, uint8_t report_id, hid_report_type_t report_type...
If you read the code, the report id as invalid is intended behavior
The reason is report parser is not implemented for hid device and it cannot tell if report id is used and part of the output report or not. And present report as raw as it is. You have to do your own parsing (read report id, and byte++).
duplicated to #1095, I will add a simple hid parser later on ne...
I get it.
But a parser is for host, isn't it? The device claims its report using a report descriptor and a parser allows the host to read the report correctly. Since we are implementing a device, we claim our own report descriptor so adding 'report id version' of TUD_HID_DESCRIPTOR and TUD_HID_INOUT_DESCRIPTOR macros should work. After all, you only need to tell the stack if it's using reportids
@hathach The host API in the master branch is different from the API I used to write this pull request. Do you need me to close this pull request and submit a new one written to the current API, or is the API still fluid?
Report id is part of report descriptor, we will need a parser to detect whether it is in use or not. I don't quite understand your idea, could you mind making an pr or codes around your suggestion to demonstrate it ?
Support STM32H7 with only 1 USB port: H72x / H73x / H7Ax / H7Bx
Describe the PR
The STM32H7 family have 2 sub families:
- H74x and H75x have 2 USB, and USB2 have an internal FS PHY. No problem with this sub family.
- H72x, H73x, H7Ax, H7Bx have only 1 USB named USB1 with an internal FS PHY (this USB1 is equivalent to the USB2 of the other sub family). And in the CMSIS files of this sub family the values USB_OTG_FS_PERIPH_BASE and OTG_FS_IRQn are not declared, so the file synopsys/...
Describe the PR
- add mili-second timeout to osal_queue_receive (mynewt does not support this).
- tud_task() and tuh_task() timeout in 1 ms on event queue to allow RTOS thread to be shared with other background work e.g cdc flush().
- In case where 1 tick > 1ms (e.g 1 tick = 10ms), at least 1 tick will be used.
- add TU_ATTR_ALWAYS_INLINE to most of osal function.
- add tinyusb docs and disable blank issue
@dhalbert
Alright I watched through the code again and realized that the macro is only for generating some hex numbers, so no operation space. Please go ahead with the parser.
seems like you miss an #endif, please make sure you compile the example and verify the changes works
FYI, Those serves as template, and aren't required to use. User can dump a byte array from existing device and feed that byte array to the stack as simulation.
Please set a configurable timeout for each queue (something like CFG_TUSB_TMO_xxx). Not a hard value. Currently there is no timeout so I managed it in the OSAL layer: sometimes 0 and other times infinite. The value 1 is not practical because it leads to useless context switches when there is nothing to do, and a waste of time if we wanted 0. Moreover, if tud_task() is called by an interrupt, it is forbidden to have a timeout!
You say that a 1KHz SOF interrupt is expensive, but you are going ...
Sorry this is my first PR, and I got confused.
I'm sure it works now.
yeah, that makes sense on the context switch overhead, the tud_task() should take an timeout as argument instead. Though regarding ISR, tud_task() must not be called within ISR when using within an RTOS. I
@Nikitarc thank you for your feedback, I have updated the pr to add new API tud_task_ext() and tuh_task_ext() that takes timeout_ms and in_isr as parameters. The task will exit once processed all events so that thread can still be shared with other background function if needed.
I see you add timeout_ms, and specify 0xFFFFFFFF = wait forever.
Please add a define for this value, e.g. in osal.h and use it in usbd.h and usbh.h.
If this value changes in the future, it will be easier to track.
Greetings
there is one OSAL_TIMEOUT_WAIT_FOREVER, you could also use the UINT32_MAX as well.
https://github.com/hathach/tinyusb/blob/master/src/osal/osal.h#L41
Thanks for the info on OSAL_TIMEOUT_WAIT_FOREVER.
Why doesn't TinyUSB's code use it?
Replace retired github action actions/setup-ruby with supported replacement ruby/setup-ruby
Minor actions/checkout version bump.
@tobozo Please fix test errors.
@FallingSnow fetching upstream fixed it on my fork
https://github.com/tobozo/tinyusb/runs/6149927028?check_suite_focus=true
Operating System
Windows 10
Board
NUCLEO-H743ZI2
Firmware
irrelevant custom firmware
What happened ?
USB HID Device does not appear at all on the host computer
How to reproduce ?
Issue :
USB HID Device does not appear at all on the host computer
Workaround :
I added some additional bit set before and after your init
In my usb device task :
void usb_device_task(void* param)
{
(void) param;
SET_BIT(USB_OTG_FS->GUSBCFG, USB_OTG_GUSBCFG_FDMOD...tinyusb/src/portable/st/synopsys is obsolete.
You have to use tinyusb/src/portable/synopsys/dwc2.
Do you have the same behavior with dwc2?
osal.h isn't considered as public header, I don't have time right now to change it.I intend to use -1 with int, but decide 0xFFFFFFFF isn't too bad. This may change in the future.
Operating System
Others
Board
Feather M4 Express
Firmware
Custom firmware using the audio functions to make a 2-channel speaker with TYPE_I_PCM decoding
What happened ?
Code will not build with CFG_TUD_AUDIO_ENABLE_DECODING && CFG_TUD_AUDIO_ENABLE_EP_OUT if the corresponding EP_IN and ENCODING defines are not set.
I believe line 539 of audio_device.c should actually be format_type_I_rx - changing it to that allows code to compile and works as expected.
How to ...
- can you verify that this is reproduced with stock example e.g hid_composite to rule out application/set-up issue.
- Also as @Nikitarc mentioned above, you should try with the dwc2 driver instead. The st/synopsys will be removed shortly in the future
thank you very much for the bump up
_osal.h isn't considered as public header
This is strange.
An application should include tusb.h wich is public.
And tusb.h includes osal.h. So an application can use what is in osal.h.
Anyway, we are not talking about application code, but about USB stack code. In my opinion the USB stack code should use its own definitions.
I'm not up to date with the latest version of tinyUSB but have had some experience with this board on an older version. If you take a look in the BSP init function for this platform you'll notice that some of your additions are already present.
For FS: https://github.com/hathach/tinyusb/blob/6ec5174d8b24d1f01a443c74a0a3dbee00523efc/hw/bsp/stm32h7/family.c#L151-L167
Or if HS https://github.com/hathach/tinyusb/blob/6ec5174d8b24d1f01a443c74a0a3dbee00523efc/hw/bsp/stm32h7/family.c#L195-L208
...
Thank you, using "portable/synopsys/dwc2" instead of "portable/st/synopsys" fixed the issue. It now works without the workaround
thank you for your PR, all the debug function must be in common/tusb_debug.h and wrapped within the CFG_TUSB_DEBUG, check out similar string debug for reference
I can confirm that this patch works with multiple IN/OUT BULK endpoints simultaneously.
I am using a raw bare API (tuh_edpt_xfer) to communicate with a custom USB device.
@cjhilder I encountered a similar issue with transactions not completing when I implemented bulk endpoints for MIDI Host using a shared EPx endpoint for both bulk endpoints and the control endpoint. EPx sharing works but is not great (see discussion #1261). My workaround for the endpoint not completing bulk transfers looks like the code below. Did you try this fix already? I would dearly love to get rid of EPx sharing in my code.
uint32_t flags = SIE_CTRL_BASE |
...@cjhilder The hcd_rp2040.c code still shares EPx except for interrupt transfers. FWIW, I tried this hcd_rp2040.c in my fork with the MIDI host example and it works as long as I implement the fix I described above. The issues I described in discussion #1261 still a...
@Skyler84 I can confirm this patch works with one BULK IN endpoint and and ONE BULK OUT endpoint at the same time with a MIDI Host function.
Is your feature request related to a problem? Please describe.
I just started using a Mac as a development platform for rp2040. I find .DS_Store files show up as untracked files. It would be too easy to commit them by accident.
Describe the solution you'd like
This Apple developer forum discussion suggests to add the following to the .gitignore. I can create a pull request for this if you would like.
# macOS-specific files
...sure, please make an PR for this, I don't use mac to verify the change.
@Skyler84 @bohdan-tymkiv Did you try this patch with a hub? I am finding it works fine when only one device is plugged in but if two devices are plugged in and packets are being sent to both devices, packet corruption occurs. Also, the IN transfers complete on both devices but the second device plugged in has an all-zero packet buffer even though the connected device should be sending data.
I have not tested this with a hub yet! Definitely something I can take a look at with my logic analyzer. I've also found that it doesn't work with transfers >64B since that's all that's allocated, and the double buffering is not complete in the HCD i dont think?
It's a fairly close solution but I think needs some refinement.
No problems at all, thanks for the update
Describe the PR
For PIC32 OUT packets that were sent from host and not handled
fast enough could lead to memory corruption.
When transfer was complete OUT endpoint was left open for
host to send more data (which is fine and allow for faster transfer).
however if data packet arrived before new transfer was scheduled
code was reading endpoint and writing past buffer that was filled
with previous transfer data.
To prevent such scenario RX interrupt is disabled when transfer is
finis...
Operating System
Others
Board
STM32L472 custom
Firmware
Custom Firmware FreeRTOS, audio+cdc composite device
What happened ?
On closing an endpoint the txfifo may not be flushed properly, which leads to no data transfered on a reopen.
How to reproduce ?
- attach device to a host having 2 in endpoints configured
- close the 2 endpoints one after another
- txfifo of the even endpoint number is not flushed due to a wrong register value on dwc2->grstctl
Debug...
Solves issue discussed in:
https://github.com/hathach/tinyusb/discussions/1439
This is not a complete solution as we only can re-open an endpoint with the same size.
But it improves the behaviour allowing to close and re-open an endpoint that is not opened at last
We now let fifos allocated if we can't free them.
We check if there is already an allocated fifo for that endpoint.
Assert when that fifo has the wrong size
This could be further improved by collecting the already allo...
This looks reasonable/fine to me. If you look at my comments over the years, you'll find that I had a number of bugs where I do |= instead of doing =.
This appears to be no exception. Also, epnum - 1 in the linked line is also wrong, but that was fixed some time ago :P.
@cjhilder I encountered a similar issue with transactions not completing when I implemented bulk endpoints for MIDI Host using a shared EPx endpoint for both bulk endpoints and the control endpoint. EPx sharing works but is not great (see discussion #1261). My workaround for the endpoint not completing bulk transfers looks like the code below. Did you try this fix already? I would dearly love to get rid of EPx sharing in my code.
uint32_t flags = SIE_CTRL_BASE | ...
I can confirm that this works for direct connection to a CDC device!
Operating System
Linux
Board
imxrt 1060, imxrt
Firmware
examples/device/cdc_msc_freertos
examples/device/dynamic_configuration
examples/device/hid_composite_freertos
examples/device/usbtmc
None of these examples work on the teensy 4.0, using etither tag 0.13.0, or the latest fa895ed3dc46d5aa5e11b19ff07beb6fcfc62655.
all other device examples work
What happened ?
I compile all examples using the tools/build_family.py. They all compile properly with the late...
Oh! Found that on the 1060 EVK, some demos are on USB1 whereas others are on USB2.
So, it appears the 1060 EVK works on all examples, so now just left wondering why it doesn't work on all examples on the tensy 4
| teensy | 1060evk | example |
|---|---|---|
| OK | OK USB1 | audio_4_channel_mic |
| OK | OK USB1 | audio_test |
| OK | OK | board_test |
| OK | OK USB2 | cdc_dual_ports |
| ... |
Update:
edited hw/bsp/imxrt/boards/mimxrt1060_evk/board.mk to change
BOARD_DEVICE_RHPORT_NUM = 1
to
BOARD_DEVICE_RHPORT_NUM = 0
and recompiled. Now the 1060 works on USB1 instead of USB2 (as expected), and that exact same 1060.hex file loads into the teensy and runs (since they use the same chip, I was expecting it to). So... chasing the difference now...
This fixes issue https://github.com/hathach/tinyusb/issues/1457.
The problem is that somehow, someway, the IOMUXC_GPIO_AD_B0_09_GPIO1_IO09 pin gets
configured wrong, which interferes with the way the teensy boots. I don't
know what's messing it up, or any. But I do know that this fix corrects
non-functioning usb examples on the teensy:
examples/device/cdc_msc_freertos
examples/device/dynamic_configuration
examples/device/hid_composite_freertos
examples/device/usbtmc
PR #1459 sure fixes this problem for me. I'm still not sure how the pin gets misconfigured in the first place.
sorry @PanRe for the huge delay, I have been overwhelmed with work with rp2040 pio usb, and just able to pull it off.
SOF and feedback value calculation by the user (as desired by @hathach. The user can apply what he tried with option 2 on his own)
I prefer this option more, since this has been awhile and you are probably busy with other work. Hence, I could do the change myself, will make it as an pr to this branch for your review :)
Describe the PR
For FreeRTOS, This PR sets the USB interrupt priority to configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY, which is where it should be in order to not cause problems for freeRTOS. it was initially there, then commented out for some reason. Not sure exactly why it was removed.
This sets the interrupt priority for both USB ports, if they exist.
Thank you for your PR. Can you put the code directly into the #elif instead of having an extra function.
sure, no problem. Just commited. Is the right thing here to do a force-push so there's only one commit? That's what I did.
@hathach No worries, glad you are back ;) I already implemented everything, all is now possible, the original solution without SOF, SOF with feedback calculation within the driver (this is a good starting point to start testing if it works with your hardware), and SOF based feedback handling where everything is implemented by the user. You can choose which version you would like by use of defines. So, there is nothing much to implement more, just have a look on what is in now give me feedback...
look great, thank you for your PR. This indeed should be set by all ports with freeRTOS.
@hathach No worries, glad you are back ;) I already implemented everything, all is now possible, the original solution without SOF, SOF with feedback calculation within the driver (this is a good starting point to start testing if it works with your hardware), and SOF based feedback handling where everything is implemented by the user. You can choose which version you would like by use of defines. So, there is nothing much to implement more, just have a look on what is in now give me feedba...
The one pin I fixed previously allowed the board to boot, but the button on the TEENSY still didn't work properly, presumably since some pins were still being held in an invalid state for the MKL02Z32FG4 (U2) to do its job. Check out the schematic.
Sorry for late response. I am busy for family reasons.
@Wini-Buh Thank you for comments. I understood we need __evenaccess keyword.
@perigoso Thank you for updating this PR to add the keyword. I think this PR is ready for merge to master branch!
Operating System
Linux
Board
pimoroni_tiny2040
Firmware
Simple host example using printf to show "attach / "detach message on callbacks.
The single additional difference was using tuh_vid_pid_get() to also print the VID:PID on attach (but nothing else on detach).
The tinyUSB library version in use was unmodified "0.13.0" source tag.
What happened ?
In certain situations it is possible to make the TinyUSB library to panic with:
Device attached, ad...Just to add I may attempt to create a fix tomorrow, but today is already too late in the night for me.
make sure you use the latest on github since issue may be fixed already since 0.13.0
make sure you use the latest on github since issue may be fixed already since 0.13.0
I did notice the panic is still present on the latest code, but the return value was removed as the panic function does not return.
Did not have time today to continue on this. Too much real work...
look like a race condition, can you provide link to compilable project, similar to the example one for reproducing.
still reviewing, but the specs/comment say K=10 for FS, K=13 for HS. Should we do (1 << K) instead of (1 << 16). Sorry if this is noob question.
My mistake when I checked head. Was looking at the head of a more recent branch, not master HEAD.
With current HEAD (d23c9b7) the panic does not happen anymore. It seems it was fixed.
On the other hand, a race condition seems to be still happening if you try to slowly detach and attach a device several times.
Eventually an ASSERT is raised on each new attach:
Device attached, address = 1
Device removed, address = 1
Device attached, address = 1
Device removed, address = 1
Devi...With a clean project [1] I got a panic on a different place when slowly inserting and removing the same device:
...
Device attached, address = 1
Device removed, address = 1
Device attached, address = 1
Device removed, address = 1
Device removed, address = 1
*** PANIC ***
ep 0 in was already available
But I lost the call stack on this attempt, which seems to be a new problem as we have the umount callback called twice in a row.
Repeating the test, got the same asser...
could I ask why we does shift 13 on f_s and 3 on cycles instead of just 16 on f_s at once.
the bInterval means 2^(interval-1), though I think we almost not going more than 128 (bInterval = 8) in most cases.
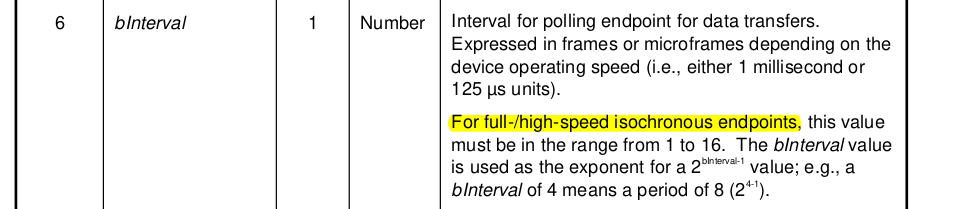
Though I don't understand why we don't just shift f_s by 16 then multiply with cycle later on instead of shift 13 on f_s and 3 on cycle ?
That is correct, my original intention was to save N and D as unit32 in order to save space. 13/3 was chosen because i wanted f_s to be able to hold frequencies of bigger than 500 kHz (just to cover a large space also for application other than audio). And i wanted the scale on n_cycles to be a small as possible because n_cycle must cover the same range as f_m, for which we need a huge number. I think 8/8 would be not a good choice therefor.
During rewriting the code, i realized that N * n_c...
Why this (more complicated) partial fix that actually seems to introduce a new issue (see below) instead of simply not assigning endpoint buffers multiple times?
Assuming reset_non_control_endpoints() will be called at a safe time: in _hw_endpoint_alloc() an if (!ep->hw_data_buf) around the assignment from next_buffer_ptr would fix it for all cases, right? That is, the warning will remain but no panics anymore and everything keeps functioning as expected. Note that `hw_endpoint_clo...
[hathach/tinyusb] New branch created: sof\-isr\-update
Describe the PR
Proposal update to #1381
thanks for confirmation, I have an update proposal for this PR detailed below :)
@PanRe I made an PR-to-PR #1463 as update proposal. Thanks to your hard work with the calculation. I have come up with something hydrid solution without hard-coded into compiler macro. For actual code changes, please check out the other PR, here is my sum up
- First of all
tud_audio_sof_isr()must be implemented, which will be invoked every polling interval, which is 2^(bInterval-1) in (micro) frames. User can then- compute their own feedback and call tud_audio_fb_set() or
- use b...
power of 2 is auto detected
since n_frame is power of 2, I just store the sample & mclk freq and do the shift (16 - (bInterval-1)). The shift is fast enough, and we don't have to store 2x 64-bit.
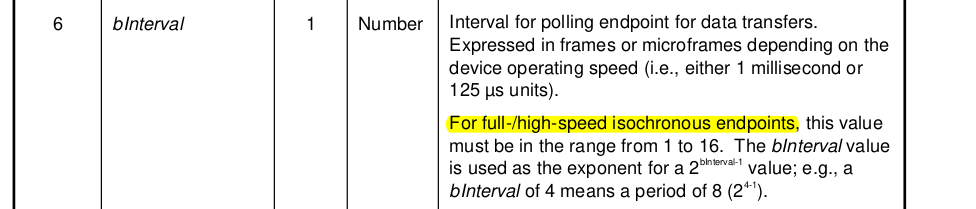
Hi @hathach,
- if
tud_audio_sof_isr()is invoked only everybInterval, it should be renamed totud_audio_interval_isr(). Otherwise i would expect it to be called every (micro) frame! - Could you rename
fb_param_factor_Ntof_sandfb_param_factor_Dtof_m? (I guess this is what you ment with cleaning up ;)) - We definitely need a minimum example for users such that they get the approach of how to implement everything
I left a few comments in the PR but i like your approach!
Since the focus has changed from SOF to UAC feedback, I think we could add something to facilite feedback calculation based on FIFO count.
It's rather a hardware question, let's take an example of 72MHz STM32F1 & 12.288MHz MCLK.
Because MCLK frequency is relatively high to system clock, timer capture & compare shouldn't be used to measure MCLK frequency otherwise the obtained result will be horrible (72/6=12MHz ~ 72/5=14MHz).
Only option is drive the timer with MCLK and count tim...
I think that would complete all possibilities to determine the feedback value! I think that would be awsome! Do you mean to add some option like FEEDBACK_COMPUTE_FIFO_COUNT, which does not need the SOF interrupt?
Do you mean to add some option like FEEDBACK_COMPUTE_FIFO_COUNT, which does not need the SOF interrupt?
Actually I'm not 100% sure if it should be based on SOF or not. All my tests was based on High-Speed which is easier to regulate the FIFO level, because frame interval is 125us instead of 1ms and less samples are arrived each frame.
It's better to test with FS to see if my method works.
Is your feature request related to a problem? Please describe.
Due to the wide range support of MCUs and the mcu sdk is often large enough. git submodule init --recursive which is convenient for most user project had a hard time with tinyusb. Maybe we should use an setup script to download mcu driver instead of git submodule instead.
@HiFiPhile do you have an example code on how to calculate feedback on fifo count work ? I will try to find a way to fit it as well or give some option to do so.
@HiFiPhile do you have an example code on how to calculate feedback on fifo count work ? I will try to find a way to fit it as well or give some option to do so.
Full code is in https://github.com/HiFiPhile/i2s_bridge, UAC related code is in audio_callbacks.c
- I define a feedback min/max of 0.1%, in UAC spec clock deviation is 0.05% for HS so 0.1% should cover it.
https://github.com/HiFiPhile/i2s_bridge/blob/1d6a24fdd0f70d150a88d85d63ed4b583b3b6b30/audio_callbacks.c#L101
Actual ...
thanks @HiFiPhile for sharing your code, I currently switch (yes) to another works. Give me a few days, I will try to update this PR-to-PR to include your feedback-on-fifo-count method.
- if
tud_audio_sof_isr()is invoked only everybInterval, it should be renamed totud_audio_interval_isr(). Otherwise i would expect it to be called every (micro) frame!- Could you rename
fb_param_factor_Ntof_sandfb_param_factor_Dtof_m? (I guess this is what you ment with cleaning up ;))
I left a few comments in the PR but i like your approach!
Yeah, will rename sof_isr(), and fs fm as you suggested, will also make a union to group all method variable to save...
I am using a CD ROm drive as device with a rp2040 as host. I can confirm that this patch prevent transfer to not start sometime.
Some added a delay but with this patch, I can read blocks on my CDROM without any interruption.
Thanks for finding it :-)
Are the descriptor macros going to be moved to usbd.h in the future?
Implementing the change by @hoihu at the SAMD port revealed another (or the same) problem. If text is pasted to the device and echoed, the USB stack locks up. Data will not be sent any more from the device. Incoming data is for a while accepted. That can easy be replicated by loading the actual MicroPython firmware to a device and then with the REPL prompt either typing very fast or pasting some text, like a piece of code. When characters are not echoed (like in REPL RAW mode), everything is ...
@hathach any idea if you'd have time to look into this PR in the near future?
@xmos-jmccarthy yes, in the future, there will be an UVC template for most common used descriptors. Too bad, I haven't spent much time on UVC recently.
@PanRe renamed and also add interval_log2 (or shift), just in case user want to use it for their own calculation.
@HiFiPhile I made a draft idea on how to add the fifo count method, the params_cb with struct for input. Fifo count method seems to reply on a few params: std (nominal) value, variation, and buffer threshold. The buffer threshold is a bit tricky, since it requires application to respect this. The rest can be computed within the stack. Let me know if I miss something before adding the actual code.
I like the idea of union.
The buffer threshold is a bit tricky, since it requires application to respect this.
Yes indeed. It can be calculated in the stack because normally it's N*PacketSize, or add a macro for easier threshold calculation in application.
https://github.com/HiFiPhile/i2s_bridge/blob/1d6a24fdd0f70d150a88d85d63ed4b583b3b6b30/audio_callbacks.c#L186
Here 8000 is for HS (125us), FS need 1000.
Glad you like the idea. I am off for a few days, will put code together next week or so
Have not tried it with the HUB. I think implementing HUB support can be a subject of a different patch. This change works and it basically makes RP2040 Host functional.
we could make use of the build system for this, meson supports something like this directly for example #1423, since its only really used for the examples it makes sense to have it a bit less tightly coupled
@hathach can you please back this out... this touches a bunch of the Pico SDK integrations (and does weird stuff like setting the clock unconditionally).
Perhaps we dropped the ball on reviewing this, but it needs some more work to not just pull in PIO support when the user doesn't want it.
We can start a discussion again on the code. Particularly, the user should explicitly opt into "dual" USB, and the existing TinyUSB base INTERFACE libraries should not include it.
- Removed some compiler warnings, and cleaned out unnecessary warning suppression from CMake
suppress_tinyusb_warnings() - Made explicit
family_configure_dual_usb_example()for DUAL mode examples asfamily_configure_target()may not generally be called multiple times for the same target - Renamed library
pico_pio_usbtotinyusb_picio_pio_usbto be clearer and avoid conflict if someone already has apico_pio_usbin their project - Added
family_add_pico_pio_usb()method for add...
Note I should probably comment on this... there are pre-existing overrides of this to 2*TCP_MSS in the CMakeLists.txt for the net_lwip_webserver example. This was causing a compiler warning, as this line just trashes it. So either my change is correct, or the override is unnecessary!
actually, i just added a PR instead #1467
We can start a discussion again on the code. Particularly, the user should explicitly opt into "dual" USB, and the existing TinyUSB base INTERFACE libraries should not include it.
Right, I agree that user need to explicitly specify the dual USBs. I am not too familiar with the way pico-sdk wrapper for tinyusb lib/target definition, but I did try to add a separated target/lib for pio_usb, and user indeed need to initialize that in addition to normal tinyusb_device/host.
actually, i j...
yeah, a build management (meson) can be useful way to manage multiple repos. Though I still want to have an simple python script with list of repos and commit hash since not everyone want to install an build management.
this PR is on my TODO, though I am currently busy with other paid work. Please be patient in the meanwhile.
Well the only requirement for meson would be python, so if you're going with a python script it's not much different, but I hear you, that is also a good option
Right, I agree that user need to explicitly specify the dual USBs. I am not too familiar with the way pico-sdk wrapper for tinyusb lib/target definition, but I did try to add a separated target/lib for pio_usb, and user indeed need to initialize that in addition to normal tinyusb_device/host.
Yes, it was actually nice and separate, the weirdness we have with keeping things happy when doing raw TinyUSB examples (which includes pico-sdk within it's build) and SDK (which includes TinyUSB wi...
@zj2004 could you please check if #1451 fixes problem you described?
Operating System
Windows 10
Board
pca10095
Firmware
custom firmware running mynewt OS
What happened ?
Problem was detected on IN transfers over vendor interface on NRF5340 (but it's not MCU specific).
It may be that other driver has similar problem.
Here is sequence that fails.
- Vendor interface IN packet is sent to host.
vendord_xfer_cb()is called- it calls
maybe_transmit() - endpoint is not busy (yet) `TU_VERIFY( !usbd_edpt_busy(TUD_OPT_RHPORT, p_itf->e...
@robert-hh did you try replacing wfi() with EVENT_POLL_HOOK in mp_hal_stdout_tx_strn?
No. I tried it now, and as expected, it makes no difference. MICROPY_EVENT_POLL_HOOK consists of a call to mp_handle_pending() and __WFI(). Since the scheduler is not enabled, mp_handle_pending() is practically a NOP.
And anyhow, when the device stops sending on UART, the MP VM still runs, and data received by USB are still processed, until eventually the UBS output buffer the TinyUSB stack is full, and no characters are accepted any more.
So it looks like the other problem here, in th...
Operating System
Linux
Board
Custom STM32L052k8 board (pretty much just a STM32L052k8 with headers)
Firmware
Based on examples/device/cdc_msc_freertos code, but modified to expose an HID gamepad instead of a mass storage device.
Code is here: https://gitlab.com/gemarcano/stm32_snes_controller/-/tree/b2c5a2273929153d082b73aa137b25dd956410a0
This uses meson to build, and it relies on FreeRTOS and a separate stm32 hal and start files being available as libraries (https:/...
this doesn't seem to be tinyusb bug, could be your modified code or setup/integration. Could you confirm if the cdc issue occur with
- un-modified cdc_msc_freertos example
- compiling stock makefile
since that is what I am using to test, and won't use any other setup/toolchain.
The issue seems to be the stack's vendor driver, currently it doesn't guard against race condition as cdc. I haven't updated the vendor driver once introducing the usbd_edpt_claim() for race protection. I actually have an plan to abstract these to stream/buffered endpoints API for driver and haven't got time to do so.
https://github.com/hathach/tinyusb/blob/master/src/class/vendor/vendor_device.c#L109
https://github.com/hathach/tinyusb/blob/master/src/class/cdc/cdc_device.c#L83
_Or...
sorry, this is kind of falling off my radar after heavily concentrated on other works. Please remind me after a week or without response, since I can get lost with other works.
The bug goes away if all I do is reduce optimization to -00 or -0g, or add -fno-inline-functions-called-once to the compilation flags, which is indicative of undefined behavior. And again, if all I do is make _cdcd_itf[0].line_state volatile, the bug also disappears regardless of optimization level. This makes me believe the problem is very much what I already analyzed, that line_state needs some kind of synchronization between tasks if it's to be used in multiple tasks at once.
...
changed markdown formatting to correct rst formatting in rst file
thank you for the fix
Operating System
Linux
Board
pca10095 or pca10056 or other NRF52/NRF53
Firmware
Latest master can be 0.13.0.
mynewt/nimble build with BTH and MSC enabled
What happened ?
When DMA is started for one OUT endpoint values read from SIZE.EPOUT[n] for other endpoint are not valid.
This behavior is not documented (yet) by Nordic but it can be observed on NRF52/NRF53.
When two packets arrive on two different endpoints single interrupt will detect and try to handle bot...
everything looks great, except, maybe we should remove re-define of network example in cmakelist
The defined in cmakelist.txt is added in this commit
https://github.com/hathach/tinyusb/commit/95f2478146ef83d18b52408c0692222bf2a15053#diff-12cfd80973cd9c09e8493c08a1eb623365231a9e2b0db14d109e9b6836985830R71-R74
PBUF_POOL_SIZE=2
HTTPD_USE_CUSTOM_FSDATA=0
are also redefined with the same values, maybe we should drop it altogether in cmakelist and adjust/use value in the header file only for consistency
this warnings from gcc11 is bit annoying, hopefully we could find an better way to go around this.
Sorry for late response, and thank for your PR. This somehow falls off my radar. The code is spot-on, though I think we can actually set the fifo number, and flush it at the same time. Let me know if you have time to test that out, otherwise, I will merge this as it is and test the combined code later on.
I think we can actually merge them into 1 line as
dwc2->grstctl = (epnum << GRSTCTL_TXFNUM_Pos) | GRSTCTL_TXFFLSH;
everything looks great, except, maybe we should remove re-define of network example in cmakelist. If you agree, I could merge this first, and make an changes as separated PR afterwards.
Sure. i wasn't sure why why was overridden in the CMakeLists.txt to start with, so didn't want to change that to remove the error. I 100% defer to your better knowledge of what it does, and if it is safe for all boards to change (or if it is even needed)
everything looks great, except, maybe we should remove re-define of network example in cmakelist. If you agree, I could merge this first, and make an changes as separated PR afterwards.
Sure. i wasn't sure why why was overridden in the CMakeLists.txt to start with, so didn't want to change that to remove the error. I 100% defer to your better knowledge of what it does, and if it is safe for all boards to change (or if it is even needed)
ok thanks, I will do that later on with a ...
This is not an error correction.
Only good programming practice: avoid displaying dozens of warning messages when compiling these modules.
If a warning appears, you have to go see what it is, and maybe an important warning is buried in it.
These warning:
..\TinyUSB\src\class\msc\msc_host.c:499: warning: ISO C forbids an empty translation unit [-Wpedantic]
Operating System
Linux
Board
N/A
Firmware
N/A
What happened ?
git submodule updating TinyUSB will fail since 4586d8f due to incompletely moving the lib/Pico-PIO-USB module to hw/mcu/raspberry_pi.
A "fun fact" I learned tonight is that git only uses the existence of a .git folder in a subdirectory in determin...
you are right, there is a leftover when I moved Pico-PIO-USB from /lib to /hw/mcu/raspberry_pi . Please submit an PR :D
Hi, @hathach,
unfortunately I currently don't have the test-equipment on desk any more currently, so no further possibility to test.
I'll do further tests with this software in the 2nd half of the year and also might test that change then, but I'd propose to first merge the current solution.
Regards Pascal
Am 26.05.22 um 16:34 schrieb Ha Thach:
@.**** approved this pull request.
Sorry for late response, and thank for your PR. This somehow falls off my radar. The code is spot...
@HiFiPhile I have a silly question, fifo_count_flt stands for float in 16.16 format right ?
Operating System
Windows 10
Board
Custom based on STM32H7B3
Firmware
portable/st/stm32_fsdev/dcd_stm32_fsdev.c
What happened ?
Dear,
I have followed the example for CDC/MSC using FreeRTOS and have got pretty much everything working. Expect for the disconnection event: unmount callback (tud_umount_cb) is not being called for this platform and driver. Mount callback (tud_mount_cb) happens as expected.
I am new to this library, so maybe I have messed up something, bu...
Confirmed this fix works on my end at least.
@hathach It took a while but we now have opensource throughput test application for nimble that can be also used to with USB transport for NRF52840/NRF5340/DA1469x.
With this software it's possible to trigger race condition that this PR fixes.
Testing application is part of nimble and is written in python and it runs on Linux.
I was able to reproduce problem only on NRF5340 where bluetooth stack runs on separate core.
This is how to test:
get go compiler if not installed
It's "filtered" fifo count. As fifo count is jumpy each time a packet is arrived / consumed, it's hard to regulate the fifo level based on raw count. So I make an average of fifo count to get a stabilized value.
Basically fifo_count_flt = fifo_count_old * 255 + fifo_count, I shifted the whole value <<8 to let the result has enough precision so float is not required.
Okay... sorry for any confusion here, but now I pretty much understand what's going on. In order for teensy to work as expected, it needs the pins configured in JTAG mode so that the reboot-to-bootloader command works (there's a separate bootloader microcontroller that connects to the jtag pins).
This patch now fixes it, and allows rebooting to the application or to the bootloader.
"Automatically retrieving deps for the examples" seems to already work via the DEPS_SUBMODULES make var. So removing submodules in place of a script that retrieves dependencies (possibly with a manual override?) probably won't be that invasive of a change for building examples.
Operating System
Linux
Board
STM32F723 Discovery
Firmware
examples/device/audio_4_channel_mic
examples/device/audio_test
examples/device/uac2_headset
What happened ?
The UART Log print's "check_dwc2 462: ASSERT FAILED"
How to reproduce ?
Compile firmware using make BOARD=stm32f723disco LOG=2 PORT=1 clean all in the relevant project folder
Open UART LOG
Flash controller
Reset controller and connect (USB connection to PORT1 is irrelevant, assert fails regardl...
Makes the printf variable a long int.
This fixes the following compile error
`error: format '%d' expects argument of type 'int', but argument 2 has type 'uint32_t' {aka 'long unsigned int'} [-Werror=format=]
208 | TU_LOG1("Clock set current freq: %d\r\n", current_sample_rate);
| ~^ ~~~~~~~~~~~~~~~~~~~
| | |
| int uint32_t {aka long u...
[hathach/tinyusb] New comment on pull request #1290: usb host: Add support for multi\-level USB Hubs
I have rebased this against current master into a new branch https://github.com/Ryzee119/tinyusb/tree/multihub_rebase
I will close and repopen a new PR as to not force push to this branch as it looks like people may be using it.
Describe the PR
- Add support for multiple levels of USB hubs. For your consideration Hathach 😄
To get this working reliably I had to relax the assert on failed port_status control transfer. Currently with multiple hubs it may perform a control xfer if the ctrl buffer is busy.
Additional context
- Developed on imxrt (Teensy41) with EHCI.
- Tested with 3 USB hubs levels, combination of low speed and full speed devices. (HID devices) Not tested with Bulk or Iso but this is ...
Hi, @hathach, unfortunately I currently don't have the test-equipment on desk any more currently, so no further possibility to test. I'll do further tests with this software in the 2nd half of the year and also might test that change then, but I'd propose to first merge the current solution. Regards Pascal Am 26.05.22 um 16:34 schrieb Ha Thach:
No problems, I think it is safe to do so when observing code from linux driver. I will make the change to pr and merge asap.
Addendum: I just debugged it. When in the assertion state, dwc2 only contains zero-values.
Describe the PR
Consider the following contrived MSP430 code and linker script:
#include
extern volatile unsigned int USBVECINT; // PROVIDE(USBVECINT = 0x0932);
int main()
{
uint16_t curr_vector = USBVECINT;
volatile uint8_t ep; // Call into function in another TU has same effect.
switch(curr_vector)
{
case 2:
case 1:
ep = curr_vector;
}
return 0;
}
OUTPUT_ARCH(msp430)
MEMORY {
ROM (rx) : ORIGIN = 0x4400,...thanks @HiFiPhile , I kind of getting the idea, filtered ~ average here
filtered = 255 * old + raw_count
feedback = nominal - (filtered/256 - threshold)
out of curiosity, how would you come up with the filtered/avg formula and how does it depend on sample rate, FS/HS link. Sorry for more question, I am trying to figure out the big picture and normalize the argument for this compute method.
out of curiosity, how would you come up with the filtered/avg formula and how does it depend on sample rate, FS/HS link.
I used J-Scope to watch FIFO level, it's kind of trial and error :)

FIFO is filled by USB packets and drained by I2S.
For the same sample rate, since HS packets arrive 8x faster every packet is 8x smaller, FIFO level variation is much smaller so ...
thanks for the explanation, unfortunately, I still pretty much have no ideas how to generalize this into generic code. Apparently, there is no formula to fit all, I am just hoping to make some skeleton and allow user to simply tweaking a parameter or two with actual hardware. However, this is really out of my knowledge, and don't actually have any real application on hardware to test these out.
Since this has been pending for quite some time, I would like to merge this as it is and come b...
thank you @PanRe and @HiFiPhile for reviewing and discussing this PR. I think we finally got everything together with frequency method (power of 2 / fixed / float). Regarding the fifo count, due to my inexperience and lack of actual app-on-hardware testing, I comment it out still having place holder to add support later on as follow up PR.
detail on fifo count method discussion https://github.com/hathach/tinyusb/pull/1463#discussion_r885637209
thank you for your PR. Sorry for the late response.
sorry for late response, I was busy with other works, the reboot_to_bootloader() and reboot_to_application() aren't used by tinyusb example, we should drop it if possible ?
reboot_to_application() / reboot_to_bootloader() aren't used by tinyusb example, could we dropped it ?
thank you for the fix, it is a bit awkward that later version of msp gcc generate 2 movs for no real reasons. There maybe other register with the same symptom. Btw could you try to introduce the const keyword to see if that help to fix the compiler
const uint16_t curr_vector = USBVECINT;
[hathach/tinyusb] New branch created: clean\-rp2040\-net\-example
Describe the PR
remove cmake compile macro for net example (use lwipopts.h instead). follow up to #1467
Describe the PR
Fix compile error for osal_rtthread.h.
thank you for the fix