#help-with-arduino
1 messages · Page 62 of 1
And the extern declaration in the .cpp file didn't work?
Oh, if you instantiated it in setup() that probably won't work, you may need to make it a global (but not static) variable
I tried adding this to the .cpp: extern MidiInterface MIDI
but
'MidiInterface' does not name a type
then tried
extern class MIDI
but
a storage class can only be specified for objects and functions
The "does not name a type" error may mean you need to #include the right header file
nis-a/sundial_v2_breadboard_version/dial_bread_sketch.cpp#L365
This'd be a lot easier to communicate without a seekrit repository.
Plus that bodger knows a lot more than I do on a blistering variety of subjects. ;)
lolol, you're all gurus compared to me 😄
@north stream https://github.com/SandwichRising/Sundial/

GitHub
Contribute to SandwichRising/Sundial development by creating an account on GitHub.
the inputsOutputs.cpp is the one throwing the error, it doesn't know what the MIDI object is. I tried ```#include <Arduino.h>
#include <MIDI.h>
#include <USB-MIDI.h>
#include "globals.h"
#include "inputsOutputs.h"
#include "midiControl.cpp"
#include "memoryControl.cpp"
extern MidiInterface MIDI```
Where is MIDI declared in the .ino file? I don't see it.
with the MIDI.h and USB-MIDI.h I'm frustrated it doesn't know why it would do the name a type error unless I'm wrong in guessing that it's a MidiInterface
in the .ino it's in the setup loop as: MIDI.begin(MIDI_CHANNEL_OMNI); MIDIUSB.begin(MIDI_CHANNEL_OMNI);
I'm seeing so many scope errors. ;)
I see the MIDI.begin() but I don't see where MIDI is declared.
oops, I guess that's not really where they're initialized right? In midiControl.cpp they're originially initialized as ```USING_NAMESPACE_MIDI;
typedef USBMIDI_NAMESPACE::usbMidiTransport __umt;
typedef MIDI_NAMESPACE::MidiInterface<__umt> __ss;
__umt usbMIDI(0); // cableNr
__ss MIDIUSB((__umt&)usbMIDI); //names the object MIDIUSB
typedef Message<MIDI_NAMESPACE::DefaultSettings::SysExMaxSize> MidiMessage;
MIDI_CREATE_INSTANCE(HardwareSerial, Serial1, MIDI)```
The very act of splitting off your .ino into a .cpp exposes them all.
Erf, I'm unused to including .cpp files, I usually split the shared stuff (like typedef) in to header files and include those.
@north stream it looked like MIDI was declared in the library's .CPP (which I thought was odd).
In my last project I split EVERYTHING into .h files, and then did #includes and was able to control everything, bring it in when I wanted. But I felt dirty doing it, like someone would later shame me lol
I would take your simplest working version (in a monolithic .ino file) and rename it to .cpp, and create an empty .ino file.
Then work (hard) to get that to compile.
Once that's working as it should, you can then think about other files.
The empty .ino only needs a comment to keep it open. Maybe not even that.
The reason is: Arduino IDE tries to be helpful, but once you graduate to more than just the .INO you need to address things the compiler (and the pre-processor, cpp) is doing to your code.
In C you generally have to declare a function before using it, and also define it.
So-called 'forward' declarations can bend that rule.
Basically, you need typedef MIDI_NAMESPACE::MidiInterface<__umt> __ss; again before you can refer to MidiInterface such as in your extern declaration. The idea of shared .h files is to avoid having that typedef twice, just re-use it in more than one module.
In plain C, the distinction is little clearer with declarations in the header files and definitions and action code in the the C files, but in C++ (and Wiring), the distinction is a little muddier, as often a bunch of action code ends up in the header file as part of a class definition.
The breadboard version compiles by error-masking important things; it's missing files and whatnot.
(refers to the non-present contents of memoryControl.h for example)
memoryControl.h:27: int pullEepromByte (byte diskAddress, int byteAddress, byte qtyBytes) ;
That's referred to in the breadboard monolithic ino file. ;)
I unmasked the error in compilation (scope, whatever) simply by moving the loop() to the end of the file.
Doing so exposes the fact that pullEepromByte isn't even present (at all) in the breadboard .ino.
Yet it compiled, initially. ;)
So this is just C compiler stuff. Basics.
When I get messed up, I start with a blank file and add stuff to it.
If the 'aha' moment happens early, I can sometimes reuse the old code, by editing it.
(I never learned C++ at all, except a tiny bit through osmosis from encountering it in Arduino libraries and code)
That's really odd, nis, it's in there, down below //pull bytes from an exernal eeprom chip over I2C, provide I2C address, address of byte(s) needed, qty of bytes to pull (either 1 or 2) //does using int return solve the problem of being able to pull multiple bytes? int pullEepromByte(byte diskAddress, int byteAddress, byte qtyBytes) { int rdata = 0; if (qtyBytes ==1 || qtyBytes == 2) { //only transmit if the request is for 1 or 2 bytes Wire.beginTransmission(diskAddress); Wire.write((int)(byteAddress >> 8)); // MSB Wire.write((int)(byteAddress & 0xFF)); // LSB Wire.endTransmission(); Wire.requestFrom(diskAddress,qtyBytes); if (Wire.available() == 1) { rdata = Wire.read(); } else if (Wire.available() > 1) { byte high = Wire.read(); byte low = Wire.read(); rdata = word(high,low); } } return rdata; }
that was saved before I did any splitting up, so it shouldn't reference any outside files. That's really odd
that's in memoryControl.cpp
right, after the split
the monolith breadboard is a stand alone file, doesn't need any other files with it
sorry my bad it's in there.
no worries! I did a double take tho lolol
well it's good that you knew. ;)
@north stream got down the rabbit hole a little farther but it's frustrating how little I know to solve some of these issues. Just to try and make it easy to test, I went to typedef MIDI_NAMESPACE::MidiInterface<__umt> __ss; extern MidiInterface MIDI; but then I get thrown '__umt' was not declared in this scope and I'm pretty out of my league now, working with library references
that file #includes both MIDI dependencies before that
Looks like I guessed wrong as to which declaration you needed: that typedef is the one for __ss, you'll need wherever the declaration for MidiInterface itself is.
I see
that gives me something to look into
I appreciate the help guys! Bedtime for me though. You'll prolly hear from me this week as I try to muscle my way thru the split lol
Projects like this make being out here a lot more manageable lol. Time goes by pretty quick
Thanks again, talk to you guys soon!
You're welcome.
Stuff like this can take me weeks to sit down and code for; the solutions often come quickly but thinking about it won't operate my computer's keyboard, to transcribe (or debug) the ideas.
🛩️ 🛩️
you could also tack a wire to the lower side of the CHG LED and monitor that digitally
I'm trying to get information when CHG LED is lit. Which side of the CHG LED would be the "lower side".
I'm using a Feather nRF52840 Express
Do you have a meter? If not, may have to load up the PCB drawings for the board from Github to see how it's laid out.
Looks like it's the pad away from the edge of the board.
For someone learning electronics without any big projects in mind, what kind of capacitors are good to have? I want to buy an assortment but want a wide variety that are going to be in range with most of my learning. What is this range that I should get?
They sell nice cap kits I find pretty awesome
Most common would be 0.1-10uF, I'd say. There are often "kits" of capacitors and resistors of a bunch of different values, specifically to stock up for random uses.
@cedar mountain we talked a few weeks ago about using capacitive fabric for this build. I've added a small woven capacitive fabric to my project, but when I try to do touchio.TouchIn(board.A5) it tells me I need a pulldown on the pin? What do I do?
I'm not familiar with the touch stuff specifically, but a pulldown in general is a resistor between the pin and ground, typically in the vicinity of 10k, but it may vary with the specific use.
Ok, I guess once I get my 3d printer up and running again, I'll have to see how I can make it fit
I saw today that there's a Feather nRF52840 Sense that has a acce/gyro built in. Might've been easier to do things that way in some form
One reference here says 1Mohm is suggested in this case.
Yeah, that's the error message I got. is it a 1M resistor?
Yes
Thanks. I'll try to aim for 0.1-10uF.
Where would I solder the resistor?
Between A5 and ground, I'd assume.
Ok, i think that makes sense. I haven't done a ton of electrical work so I'm asking very basic questions 😬
Hey all, I have a project i've been working on using an Uno that I want to move to using a teensy. I'm using a couple of sensors that require 5v Vin that so far I've been supplying just from the arduino itself. Since the teensy only has 3.3v out, I'm going to need an external 5v supply. Can I just run both the teensy and sensors off the same supply and use that as the analog reference, or should i get a good external reference chip to get accurate voltage readings? sorry for the rambling; I discovered this was going to be a problem when I used the 5v out from the arduino to power my sensors and the teensy returned really inaccurate readings
@visual steeple looks like the teensy will accept only 3.3v on analog inputs, what do your sensors put out?
up to 5v but i only care about 0-2.8v, so 3.3v input is fine
i didn't know about aref prior to this and now i'm wondering if my sensors will put out different readings even on the arduino i've been using, if i just switch to another power supply or computer
do not apply more than 3.3v to AREF
when you used the arduino +5v, did you also connect ground?
yea
i thought the readings look off, and used a pot to confirm
a pot powered from the arduino, set at 0 doesn't read 0 on the teensy
and the teensy and arduino share ground?
not many 3.3v boards tolerate 5v, most pins do on the teensy looks like
analogRead on the teensy just returns 1023 at >3.3v so i thought it was good enough for my needs
sounds like normal behavior, do you get readings now?
one sec i had cleaned up for the night haha
a lot better, thanks!
so i guess i'll just power my sensors from 5v and ground everything+teensy on the same rail
thanks again 🙂
yes, everything needs a common reference. happy hacking!
the teensy is still reading 1-2 with the pot at 0, but im guessing that's just cause it's not exactly 0v?
1/1023 , just noise
fair
last q: for what applications would one use an external reference chip then?
say you needed to precisely measure 1.00 v, the power supply and the internal references have tolerance, an external ref is designed to be exactly a voltage regardless of temperature, input voltage, etc
your measurements are only as accurate as your reference
makes sense, thank you again!
you are welcome!
I'm constantly having to reflash the bootloader to a breadboarded ATmega32u4 becuase the programmer stops responding over usb. Sometimes it works all day, sometimes I need to reflash after only working for 2 or 3 usb flashes. Any ideas on an easy solution?
have u tried changing everything in tools menu to your board?
Is it possible to make an Arduino beep a buzzer with out a bread board?
@clever bramble yep, just sometimes it stops being able to communicate with the programmer. A few times a day. Then when I reflash the bootloader onto it it's fine again
ok thanks
@proven mauve idk then, i have same problem
@proven mauve @clever bramble There are a bunch of possibilities, and the fix depends on what's actually happening. It could be that it re-enumerates, and then appears as a different USB device, it could be that the USB device is hung, so data doesn't get through. It could be that it re-enumerates but as a different (non serial) device. It could be that it stops appearing as a USB device at all. It could be a reset issue. It could be a bootloader issue.
@north stream thanks, I'll try to pay attention to those as I work. I think the usb still works for midi when it happens, but I'll need to pay attention
Ah, that's an important clue!
@cedar mountain I wired up the CHG led to a digital pin & it was working great yesterday. Today it isn't working anymore :(. The value from the pin is always outputing TRUE
I'm not seeing the LED light up when charging anymore either 😬
I had it connected to D13 & the direction was set to "INPUT"
Silly question, are you sure that the battery is actually charging? It might simply be fully charged already.
I am sure the battery isn't fully charged
The CHG led isn't turning on at all
I have a second, untouched board that lights up fine with the same usb, charger, and battery
Can you disconnect it from the D13 pin? If that were somehow outputting high instead of being an input, that might explain the symptoms.
disconnecting it from the D13 pin showed no change in behaviour
Odd, I don't have a good explanation for what happened, given the information so far.
Hello I have an Arduino Mega and a Windows Computer, on the computer I am running Chrome browser over a local server on a website I built , I would like to trigger the Arduino from the website , what is the best way to approach this?
@lament epoch from what I hear people like to use modules like an ESP32 or ESP8266 to connect to the wifi and monitor things like website changes. They're microcontrollers with built in wifi
I've got a problem in my code I've narrowed down to this function... int pullEepromByte(byte diskAddress, int byteAddress, byte qtyBytes) { int rdata = 0; if (qtyBytes == 1 || qtyBytes == 2) { //only transmit if the request is for 1 or 2 bytes Wire.beginTransmission(diskAddress); Wire.write((int)(byteAddress >> 8)); // MSB Wire.write((int)(byteAddress & 0xFF)); // LSB Wire.endTransmission(); Wire.requestFrom(diskAddress,qtyBytes); if (Wire.available() == 1) { rdata = Wire.read(); } else if (Wire.available() > 1) { byte high = Wire.read(); byte low = Wire.read(); rdata = word(high,low); } } return rdata; }
If I run that function, afterward my MIDI over usb bogs down, and will hang the program for around .25 seconds every time it attempts to perform a midi send over usb. The midi sends are no longer received by the computer either. And all it takes is running that function once and the device can't recover until after a reset.
I am using this library to send midi over usb: https://github.com/lathoub/Arduino-USBMIDI

GitHub
Allows a microcontroller, with native USB capabilities, to appear as a MIDI device over USB to a connected computer - lathoub/Arduino-USBMIDI
unfortunately it doesn't have a .flush command, I'm wondering if that would fix the issue. But, it's the only library that mimics the standard MIDI Library, so that my serial MIDI and USB MIDI all use the same commands/syntax
If I stop using that function, the problem never occurs. If I comment out usb midi sends, the problem never occurs
Hello, i'm following this tutorial: https://maker.pro/arduino/projects/learn-how-to-enable-communication-between-an-arduino-and-web-browser, and I get stuck at the last step with the ardunio sketch that uses #include <VSync.h> , i get ```
compilation terminated.
exit status 1
VSync.h: No such file or directory```
I installed the Vsync library for processing, but im not sure where to get the file for VSync.h and which folder to place it , for the arduino IDE to use it. Any Ideas?
@lament epoch is that library compatible with the board you're working with? I'm not at a pc but to me that sounds like a base file for the library itself, and if the library is installed I would expect it to be there. Take that with a grain of salt though, I haven't used that lib
Where did you find the vsync library? How did you install it?
helo my pigpio on raspberry pi 4 have nott a toot have can i get a root to pigpio
sorry *root not noott
can someone help me
That question might be a better fit on #help-with-linux-sbcs or #help-with-circuitpython : pigpio is not really an Arduino feature.
I dont wanna get into details here with what the blackbox is but i am trying to control it with pwm off the arduino but it requires more power than the arduino can put out so i have a battery setup. Last I asked I would then need a transistor to control the power flowing through. I have set it up like this:
my code is really only just:
int pin = 6;
void setup() {
pinMode(pin, OUTPUT);
}
void loop() {
analogWrite(pin,255);
}
is this all correct or did i misunderstood something
What do you mean by "it requires more power than the arduino can put out"? Do you mean it requires more voltage?
have you linked the common grounds together? is the black box also separately powered as well as this apparent PWM input into the black box?
linked Common grounds together? - as in if all are connected to ground?
yea both your transistor ground, arduino ground and battery ground linked together?
yeah they are
ok cool
also note that the way you have it is that the PWM signal would probably be somewhat inverted by your transistor arrangement
well the transistor will pull the 9V down to ground whenever the arduino pin is high
assuming that you've connected the +ve side of the battery to the resistor, although it is drawn with the negative connected to the resistor
Oh yh thats me being too fast haha
Im relearning lot of these things i never got too into schematics so thats on me my bad!
also you need a series resistor between the arduino output pin and the base of the transistor
generally 1kohm
there its still ot doing anything
and if i connect the black box directly into power it does work
so i know that part is working
maybe its my cabling thats off then haha
well the 470ohm resistor probably limits the current into the blackbox, if thats meant to be the power pin input to the blackbox
oh? I put it on cause thats what i understood from some guides i pulled up
don't remove it yet though
it is needed so that you don't short the 9V to ground whenever the transistor is activated
but i'm just wondering if there are different inputs to the blackbox which are more suitable for different things
are you trying to control the power to the blackbox?
Yup i want it so that i can smoothly kinda like a fading LED
maybe what you are looking for is to have the BlackBox V connected to +9V and the ground pin connected to the top of the transistor and forget about the 470ohm resistor
so that the transistor controls the ground of your blackbox
could you schematic that one or like a drawing or something cause that isnt really clicking to me
what the difference is o:
but the disclaimer is that i don't really know what your blackbox is
and whether it requires ground all the time for other reasons
well if ya up for kinda weird projects i can dm if ya still willing to help cause like im not too emberessed about this its just a lil weirder project haha
Boris helped me a little bit here and the drawing above did work! Its just not 100% what I envisioned. So the problem is that the black box doesnt really like the PWM all that much so it only works on 255 pwm and I want to control the voltage of the blackbox depending on the PWM outputed. I was wondering if i could use a capacitor for that and if so how.
I been googling around a little but cant seem to find anything there
please do tag me if you answer this question 😄
@severe umbra What you probably are looking for is a RC low-pass filter. That will average out the PWM pulses into an analog voltage level.
So where about do I put that? At base pin on resistor? Or
It's easier to do it on the low-power (base) side (which should have a current limiting resistor anyway).
Ok i have another problem
im trying to communicate with arduino through serial port with pyserial But it's not working
it's just does nothing
this is my demo code just to see if it works or not
Arduino Sketch
int b = 2;
int c = 3;
void setup(){
Serial.begin(9600);
}
void loop(){
while(!Serial){Serial.print("waiting");}
Serial.print(a); Serial.print(",");
Serial.print(b); Serial.print(",");
Serial.print(c);
delay(250);
a++;
b++;
c++;
}```Python Code
ser = serial.Serial('COM6', 9600)
print('serial')
while 1:
print('looped')
val = ser.readline().decode('utf-8')
parsed = val.split(',')
parsed = [x.rstrip() for x in parsed]
print('striped')
if len(parsed) > 2:
print(parsed)
a = int(int(parsed[0]+'0')/10)
b = int(int(parsed[1]+'0')/10)
c = int(int(parsed[2]+'0')/10)
print(a)
print(b)
print(c)```it looks like python is having trouble executing this line val = ser.readline().decode('utf-8')
i tried to to use serial in my other python codes and the results are same whenever python executes that line it just Don't respond
This is what i got in python terminal
I think you just need to have some newlines on the Arduino side, since it just prints numbers and commas, but never finishes the line.
Umm DO you mean i have to do Serial.println()?
ok i'll try that
Like on the c print statement, to end the line there.
@proven mauve it should be compatible based on the Tutorial , I am using the Arduino Mega 2560 R3. I do get the vibe it should be installed on the PC aswell.
@north stream I found Vsync library in processing Import Library > Add library , searched for it and added it there, the error i believe may be that my PC itself does not have Vsync available but I am not confident about any of it.
Ok @cedar mountain it's working Now Thank you so much. You and @north stream is like a backbone of this server Thanks for being Who You are (i hope my broken english made sense)
Hello the line #include <VSync.h> in the Arduino sketch in this tutorial : https://maker.pro/arduino/projects/learn-how-to-enable-communication-between-an-arduino-and-web-browser is causing an error. ```Arduino: 1.8.12 (Windows 10), Board: "Arduino Mega or Mega 2560, ATmega2560 (Mega 2560)"
fatal error: VSync.h: No such file or directory
#include <VSync.h>
^~~~~~~~~
compilation terminated.
exit status 1
VSync.h: No such file or directory

Maker Pro
Enable communication between an Arduino and Web Browser using the Open Sound Control (OSC) protocol.
Where did you find the library?
@north stream I found Vsync library in processing Import Library > Add library , searched for it and added it there, the error i believe may be that my PC itself does not have Vsync available but I am not confident about any of it.
I don't think Vsync is built in, so Import Library couldn't find it unless you had placed it somewhere. My question is where did you get it so you could import it.
So I have part of my problem narrowed down ... invoking Wire.endTransmission(); and Wire.requestFrom(diskAddress,qtyBytes);
are causing the USB midi to choke/hang. But I'm not sure why. Using softwareWire instead causes the same issue
after using either of those commands, sending a USBMIDI.note command causes the program to stall for almost .25 seconds and never sends the command over usb
bedtime for me though... I guess another whack at it tomorrow
@north stream Processing IDE has a search feature for libraries when u go to Import Library > Add library , However in the Arduino IDE does not have the same option. I am simply trying to follow the tutorial, which makes no mention of where the VSync is to be located, so i am here trying to figure it out.
So you're saying you installed the Processing library but not the Arduino library, because you didn't know where to find it?
@north stream yes
Ah, that explains the error message you're getting.
@north stream any ideas?
You'll need to install the Arduino Vsync library
can that be done through the IDE?
I chased down the repository for the Processing Vsync library https://github.com/erniejunior/VSync-for-Processing which includes a link to the Arduino Vsync library http://erniejunior.github.io/VSync/: that page has instructions for installing it in the Arduino IDE
Thank you , taking a look
@north stream I got that part working, thank you.
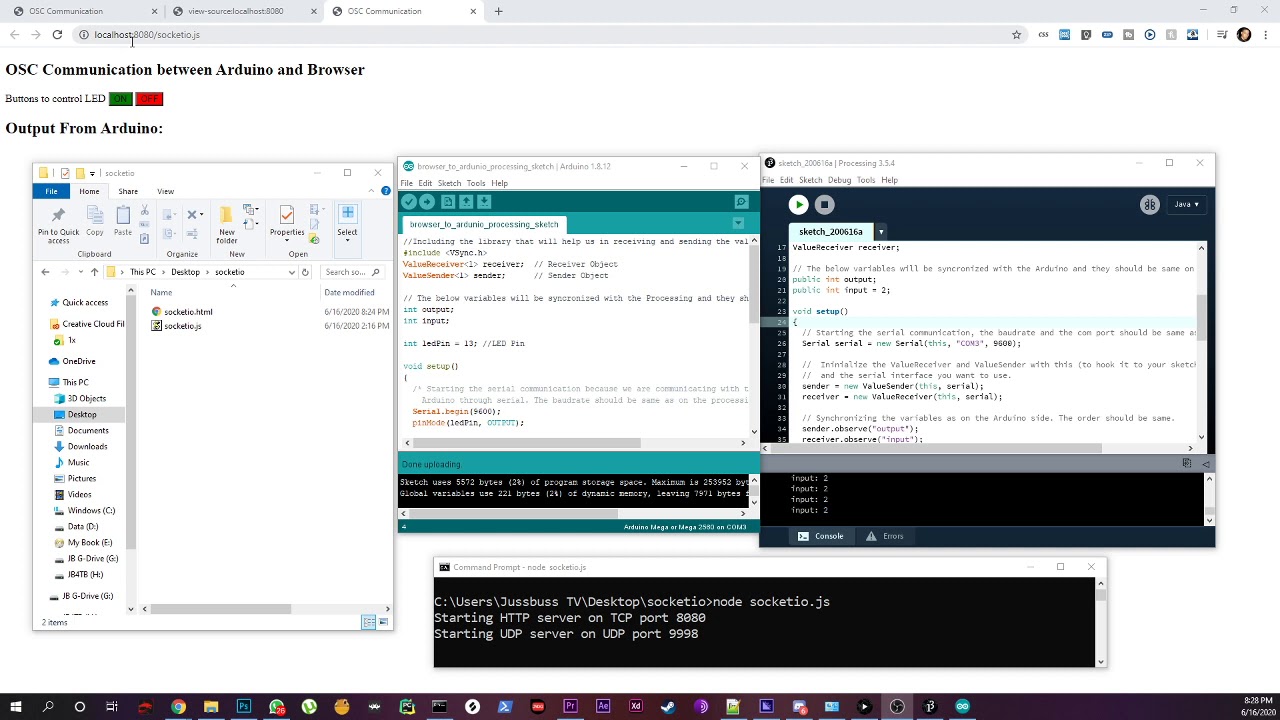
I have a new issue, the file structure and names used in this tutorial (https://maker.pro/arduino/projects/learn-how-to-enable-communication-between-an-arduino-and-web-browser) seem odd. The tutorial uses this script <script src="/socket.io/socket.io.js"></script> which suggest there could be a folder named "socket.io" and file named "socket.io.js" which seems odd, also the tutorial says to name the file 'socketio.js' not 'socket.io.js'. Either way when I update the src to match my file structure, I cannot access the JS as a source in the console. Any ideas what I may be missing?
I don't think the directory structure is critical, as long as your web server can find the files, and the paths referring to them match how they're stored.
It's probably worthwhile trying to get it directly from the URL bar in a browser.
Once you have a URL that you know works, you can put it in your HTML.
Hi! I got a RA8875 and the 7" screen -- but the screen doesn't seem to work, does anyone have any ideas as to what I can do to diagnose this? The RA8875 is working fine, and I'm receiving touch events, but the screen backlight isn't even turning on
Can i connect 2 i2c devices to one arduino uno
As long as they have different I2C addresses, many devices can share the same bus, yep.
https://www.youtube.com/watch?v=Sf4bCD_MBD0&feature=youtu.be I put together this video to showcase my current issue. I cannot understand why the Javascript file is not being properly loaded. What am I missing? again I am following this tutorial for reference (https://maker.pro/arduino/projects/learn-how-to-enable-communication-between-an-arduino-and-web-browser) @north stream
What directory is the HTML file in? What directory is the javascript file in?
@north stream they are in a folder socketio which sits on my desktop. inside the socketio folder is socketio.js and socketio.html and the script src in html header is just socketio.js as they both sit in the same folder and node is run on the js file in that folder
in my video above, the code for the javascript file should load when I click its link in view source, it does not, which suggests it not properly accessing that file, i have no clue why
Maybe open network debugging in your browser for a look at what is happening.
Also perhaps try accessing the js file directly from the URL bar (as I suggested)
question, what happens first in for loops, iteration or condition checking
im using this bit of code
for (int i = 0; i < 3; i++) {
displayY[p1PaddleDraw[i]] = 1;
}
to write ones into the positions specified by the values of an array, and im curious if how I have the for loop set up might have it run a final time with i=3
im also more just curious best practices for for loop conditionals, is it better to use i < 3 or i <= 2? Something else?
This will stop at i = 2, after 3 iterations.
cool
The choice of ending conditions is usually semantic: whether it's more important to emphasize the number of iterations, the ending value, or a sentinel that won't be hit, etc.
neat
thanks for the help!
actually i've got one more question
for arrays and variables that arent going to have values over 255 is it better to use an int or byte array, or does it not matter?
im curious about this because i was doing some math using sizeof on an array and while checking the arduino reference i discovered that because it was an int array i would need to do a bit extra math when i could just use byte arrays
It depends... If the values are truly always supposed to be bytes, like pixels, it's a good idea to use that native type. If it's more of a "well I think the values will probably be small" situation, you might err on the side of not introducing a subtle bug if you happen to run across 300 one day.
Also depends on how RAM-starved the chip is and how much you can save given the array size.
Im new to programing and robotics any newbie project ideas?
im not planning on using more than 255 rows or columns of leds so it should be fine to use byte
it shouldnt be ram starved at any point
what type of sensor would I need to make something like Edward Elric's Automail Blade? A distance sensor?
to detect my arm there to start the track moving
do you want the blade to move as your hand moves or just move on its own at a set speed when triggered?
do you want it to move when touched by your hand or something gets close to the sensor?
When something gets close to the sensor
i would guess you need a proximity sensor, although i dont really know sensors that well
Thanks! I'll find a way to program it, I just need the type of sensor I should use
would an IR sensor work too?
or an ultrasonic
but IR might be better
Yep, there are a lot of decent short-range IR proximity sensors intended for "is the phone next to my face" use cases. Silicon Labs and AMS are two good vendors off the top of my head, and ST has some very nice time-of-flight sensors which give you precise distances, too.
actually, Ed can just touch the automail
so a touch sensor might work
but thanks!
Don't discount the simplicity of a button if touch is an option, heh heh.
true
I can't find any good touch sensors that I can hide too
but can you paint them and they still work?
i could just hide it under the protective plating
If not, I'm sure it would work out
The resistive touch sensors should still work if painted, I would guess, as long as it wasn't conductive silver paint or something.
Ok
do you think this one would work? https://www.banggood.com/TTP223B-Digital-Touch-Sensor-Capacitive-Touch-Switch-Module-p-1158322.html?rmmds=search&cur_warehouse=CN

www.banggood.com
Online Shopping at Banggood.com!
It's the only one I can find that can fit almost flush
so he can touch it almost anywhere
maybe the hand with a slight delay
I think that would be okay. With a quick glance at the data sheet, it looks like it does some auto-calibration, so paint on the electrode surface should be compensated for.
(I'll let someone else offer an opinion there, as I'm more of an ARM processor guy myself, heh heh.)
Hey... if the USBMIDI and Wire libraries both have an .endTransmission(), could that cause them to get confused with each other?
Not usually... many different libraries have a begin() function, for instance. The namespaces are library-specific.
"When in doubt, print it out" is my debugging mantra. 😁
I can see where the issue is, but haven't found why lol
Hello everybody. Is this channel generally text chat or voice chat?
text
Great. I’m using an Itsy Bitsy M4 express to control some motors. There is a nasty audible frequency that the motors are making, I’m wondering if it’s the PWM frequency (~733Hz). Video link here https://youtu.be/GdPn_U5_Cfk

Audible tones being produced from Arduino PWM Moro’s controller
If it is related to the PWM frequency I was hoping I could get help changing the PWM frequency to something higher than ~20kHz
are you using some sort of motor driver there?
is the print working?
maybe try: if(s == "12345678")
Open-source electronic prototyping platform enabling users to create interactive electronic objects.
what about the Serial.println(s); printout
your code already has it
do you get a printout of the RFID string?
ok so i think it should either be: if(s == "12345678")
or: if(s == "12345678\n")
if(s.toInt() == 12345678)
Hello
I was playing around with serial plotter. I wrote a code which sends the adc value of a2 on my arduino nano to serial port every 100ms
Out of curiosity I left the analog pin floating
And this is what I get from the plotter
I see a pattern here
What could that be?
I changed the delay to 10ms
And this is what I got then
And it don't even shows accurate values for my LDR
How can I solve this?
when the card number prints out, are there any other strange characters that print out as well?
is it 01234567 or 12345678
k well maybe: if(s.toInt() == 1234567)
although i'm not sure if the zero will throw off the .toInt() function
it sounds like you aren't getting consistent readings from the RFID?
are you using some sort of motor driver there?
@molten maple yeah there are some FETs there driving the motors
Hey guys im back on my project unsure how to fix it haha. Last few post we got something that is sorta working but not 100% what I wanted. Now what is to control a device's voltage with PWM. So that when pwm is on 255 it gets full 9v and when its on half it gets the 4.5v. So that we can slide it like that. Directly connecting it to pwm it didnt like it just made high pitch noise on the smaller pwm settings so that didnt work. Then I was told to try use a low pass filter which i couldnt get to work. So I got two questions what value capacitor should I use on 9v and pwm and if this schematic here is correct?
(Picture incoming)
The resistor in the picture is currently 1k
please do tag me if you answer this thanks!
wait, is there any way I can make a touch sensor with aluminum tape and some wire?
ok so i changed schematic above so that + of capacitor is to base of transistor and the - is to ground and thats before resistor. Now im having some weird code problems:
int mediumPin = 6;
float value = 100;
void setup() {
pinMode(mediumPin, OUTPUT);
}
void loop() {
analogWrite(mediumPin,value);
}
This produces high pitch sound
int mediumPin = 6;
float value = 100;
void setup() {
pinMode(mediumPin, OUTPUT);
}
void loop() {
analogWrite(mediumPin,100);
}
this works
i tried both int and float to see if it was something weird like that
any idea why this is
If you are controlling a motor - you need some initial impulse to make it rotate first, then you can regulate the speed. With low voltage the torque is low, so the motor stops because of friction - and its coils make the sound on the frequency of the PWM.
im not 100% sure i undersand whataya mean lamfe but code wise if I do:
-> Analogwrite(pin,255);
-> Delay(10000);
->Analogwirte(pin,value);
would that work?
make it have a state
so if state 0 do the 255 and wait 10 secs and then after there do the value thing
You can do it this way
But the motor will still stop it you write send too low voltage to it - you should make sure you send only higher voltages than the one the motor stops at
none of the touch sensors would work
can I just make one with aluminium taep?
tape*
ah
also yes extrovert artist im pretty sure that question is pretty google-able haha
if you make a roll of tape between the two aluminum so that they dont touch
and do so that when you press the two aluminum touch then yh thats a touch sensor
you put ground on one plate and + on the other plate
but i dont think i need to say that since ya now directly touching the conductors
you shouldnt play with too high electricty
@bitter anvil That might be interference from ambient lighting, modulating the signal at the mains frequency.
@molten maple Note that an int on Arduino is 16 bits, and can only hold values up to 32767. You might want to try converting to unsigned long, or writing a string comparator that ignores leading zeroes, newlines, etc.
@sturdy frost If by "touch sensor", you mean "capacitive touch sensor", you can use anything even vaguely conductive (a banana will work). If you're trying to build a switch out of conductive materials, conductive tape would work, you'd need two contacts that would be bridged somehow: the usual lashup is to hook one to an input with a pullup resistor enabled, and the other to ground. Hooking one plate to + and one to ground would merely cause a short circuit, which is (very probably) not what you want.
Thanks both of you!
also to my question i think i got it fixed i need the logic sorted out but im a programmer so that part should be ok
that's good
i just saw madbodger answering stuff and i didnt wanna waste their time on something thats fixed hehe
For those of us following along at home, what was the fix?
the thing that lamfe suggested it needed to like rev up if you will haha basically i write a 255 real quick so you can see the difference to kinda rev the motor up
and then i write the value i want
int pin = 6;
int value = 0;
int state = 0;
int cooldown = 1000;
int revDelay = 30;
int fade = 5;
int startValue = 70;
int endValue = 230;
void setup() {
pinMode(pin, OUTPUT);
Serial.begin(9600);
value = startValue;
}
void loop() {
if(state == 0){
analogWrite(pin,255);
delay(cooldown);
state = 1;
}
else if(state != 0){
analogWrite(pin,255);
delay(revDelay);
if(state == 1){
value = value + fade;
if(value >= endValue){
state = 2;
}
}
else if(state == 2){
value = value - fade;
if(value <= startValue){
state = 1;
}
}
analogWrite(pin, value);
delay(cooldown);
}
Serial.println(value);
}
is the code i am using as a kinda fade test
if i go lower than 30 revDelay It'll just make high pitch noise but 30 mms is so fast that theres not anyway you can feel or see a difference
and then i write the next value o:
the code i need to make now is something i done before but i cant remember the weird code i had to do haha
Nice work!
thanks!
oh i didnt know parseInt is a thing
that kinda makes this whole thing 100% easier
LOL
how did you learn Arduino?
Me? Same way i learn anything. Pick up some books, see a few youtube video basically just taking all the information i can but thats given i been programming 4 years prior to learning arduino and lots of it is kinda the same logic
ah, thanks!
Hello. I have trouble getting the tft library to work with my Arduino Due. Always get an error :/ Do you guys have any idea how to fix it? (I want to get my tft touch-shield to work with my Due. Displaying bmps works fine)
What is the error you get?
@north stream it says:
C:\Program Files (x86)\Arduino\libraries\TFT\src/utility/Adafruit_ST7735.h:118:79: error: 'newColor' was not declared in this scope
uint16_t Color565(uint8_t r, uint8_t g, uint8_t b) { return newColor(r, g, b);}
can i use this (https://randomnerdtutorials.com/flash-upload-micropython-firmware-esp32-esp8266/) program to get micropython on my ESP32? i've only seen tutorials using cmd

This posts shows how to flash MicroPython firmware to ESP32/ESP8266 boards using the uPyCraft IDE software. It works on Windows, Linux, and Mac OS X.
@lavish rapids Hmm, I'm not familiar with newColor(), which appears to be the problem. Where did you find the code?
It popped up as soon as i added "#include TFT.h"
Hmm, I'm guessing it either needs another include or another library.
@elder hare that certainly looks like what it is for -- I have not tried it....yet.
this is more math based than it is arduino based but I have my motor thing here and minium pwm i can set it to is 70 and maxium where it does a difference is 230.
So we have:
min = 70
max = 230
value = user input (1-100)
The user inputs a percentage where if they input 1% it returns 70. If they input 100% it returns 230.
The way to calculate this would be:
difference = max - min;
s1 = difference * (value / 100);
result = min + s1;
yup somethings wrong with this math
do the 0th and 1st IO pins on an ardunio behave the same as the others? those two pins are acting weird for me
i tested my code on two arduino's and i removed all of my circuit from it
and those pins are weird
Yes, those two are the serial data pins that communicate with the host: using them as GPIO pins can interfere in various ways.
i guess my code was wrong
it was some int to float stuff in c# that was being bad
haha
rip
Hello. Hi. I'm thinking of getting an Arduino. I've never worked with Arduino, but I've had a bit of Raspberry Pi experience. What kind of model would be suitable for me as the first Arduino?
I would suggest an Arduino Uno WiFi Rev2. It is a the basic Uno with additional wireless capabilities and is still easy to use with a breadboard.
Hi, so I tested to compile my code with the FastLED library on a ubuntu system. I had to import the library manualy because the IDE said my library have to containe only non ASCI charaters (no space, number etc...). I changed the name but the error still here. So I moved the folder manualy to use it and when I compile my script, I have this error (Tetris.ino is my project) :
(This is the error (too long for discord 😭))
It looks like the library is using some compiler extensions (the __attribute__ stuff) that's having some sort of problem. I vaguely recall the header files do a bunch of #ifdef checks for various environments to configure all that, but if it doesn't match your environment, things may not be set up correctly. Alas, I don't know how to fix it
Hey So I avoided the tft libary and used the ardafruit_gfx library. That does work fine with my Touch-Shield and the Arduino Due. Next step is the Touch-function. There for I used the TouchScreen.h Library from Adafruit. I connected the Touchports to the x- and y- axis. That works fine. But the coords it shows me are a bit strange (the screen is 320x240) and the cords start at x=220 y=161 and go to x=818 y=884. Do you have any idea why they are so high and dont start at 0?
I think you need to calibrate it first
do you have an idea where I do that?
There should be an example sketch to do that
mhh in the Library are only a frew files. 2 example scetches (there is no setting vor min/max), a "TouchScreen.h", a "TouchScreen.cpp" and a few others (like read me (it only describes what that library does in 2 sentences), coc, license)
ok got it. I remapped the numbers with the "map" function 😄
I am trying to get a photoresistor working. But it only reads 0. Any help?
When i remove the connection from the resistor to ground it goes to 1023
what voltage do you measure at that voltage divided node?
and does the voltage change when covering the LDR?
possibly the resistor is not an ideal value
i dont have a multimeter, but the analogRead over serial does not change at all
I agree the resistor value is probably not ideal.
i have tried a 10k 470 and 220 resistors
could the wrong resistor value make it not change at all?
I thought it might be a 10Ω resistor, which would end to do that. 10k ought to work.
Note: the resistor isn't going to ground, as you have 3.3V hooked to the blue rail and 0V hooked to the red rail.
Nope, I got confused because I couldn't see behind the orange wire, scratch that.
im not sure what i did but it now seems to work but only gives 0 and 1023
D1 is a digital lead, not an analogue one, so that makes some sense.
given my board has only 1 analog pin is it possible to have multiple analog inputs?
Yes: you can use an external ADC, or add a multiplexor to your analog pin.
Or implement an ADC yourself, but that's the Hard Way.
It looks like my project might be impossible by the deadline but you were very helpful nevertheless. Sorry if some of my questions were a bit dumb
We all start out as beginners. And you're not the only one: there was one person whose project was due yesterday who got an extension to today. That said, there may be a way to accomplish what you're trying to do with the parts you have, but we'd need more details to make any suggestions.
@austere python ESP8266 only has one Anolog in pin and that is A0, please move your yellow wire from D1 to A0 on the other side of the 8266, The pin is marked as A0. and then change your code accordingly.
@slow snow you posted it int #general-tech and #general-chat - please stick to one post
Hey, I'm working on a DS input display. I have all the buttons working, I just need help getting the touchscreen working. It's a standard 4-pin touchscreen which I have access to all 4 pins. I've routed them to 4 analog pins on the Arduino pro micro. The problem I have is that the DS runs at ~1.8 volts while the Arduino pro micro runs at 5V. If I use standard code for reading the touchscreen, the DS freezes since I'm running a much higher voltage
?
Hello, I'm looking for some help- I am making a robot with a lot of servos. I am using the arduino servo library. I have a function that I want to take in the ID of a servo as a parameter. Then this servo's ID is used in an if statement.
Basically I need to check if the servo's ID is a specific name. But I get the error when compiling. I tried comparing it to a string "servoFR" first, but that also didn't work. Any ideas?
@grave garnet Are you connecting to the touchscreen directly or to a controller? Is it a resistive touchscreen?
It's a 4 pin resistive touchscreen
this is basically what it is, I have routed each pin of the touchscreen to an analog pin
I'm unsure why it would matter then, if it's entirely separate form the other circuitry
@formal onyx Servo objects don't have an equality test, but you might be able to test their addresses.
by doing that, I'm putting a 5V signal into the DS, which freezes up the DSes 1.8v hardware
You mean test the pin I assigned them to?
I guess I could make a servo class that contains an ID for each servo that I could compare. Comparing to the pins doesnt really work because my goal is to use my function instead of Servo.write. Unless I'm misunderstanding what you mean by address which is totally possible
I think @north stream was suggesting passing around pointers to the Servos instead, and comparing the pointer addresses.
Im not sure what that means
Im having a bad time coming to C from python..
I think I'd rather just make a servo class instead because I have other data to store about the servos (min and max pos, ID, etc), but im looking around online and it seems like people generally make a library instead?
A pointer in C is kind of like the id() in Python, i.e. what is checked when you use a is b instead of a == b, though it tends to get used for more stuff. But if you have a reason to make a wrapper class anyway, that's a great solution.
Whether to put it in a library or not is just a code organization question.
@grave garnet So you're saying the touchscreen is connected to the DS as well as the Arduino?
Yeah
There's no way that's going to work then 😦
would it be possible to read the ds signals?
like wait for the DS to send out it's "high" voltage
and then read when it does that
would that be viable
The timing would be really tricky.
If I define a class, and create an object in that class, is that object's datatype its class?
Like if I am defining a function, and its argument is an object of that class, should I do
int function(classname object){}
?
Commented out is the code I am trying to replace with my class. (servoFR should be jointFR etc)
You should really name the class Joint instead of joint so it's easier to tell apart from the variable named joint.
The constructor should also be named Joint(...), not servoJoint(...).
When you pass it to a function, it's best to write int commandJoint(Joint &joint, ...) otherwise is will make a copy of the joint object.
But really it would make most sense if you move that commandJoint function into the Joint class.
Oh, and you also need to put instance variables for ID, minPos, etc into the Joint class.
Youre right, it does make more sense to put the commandJoint function into the class. What exactly are instance variables? Truth be told this is my first time making a class in C.
@formal onyx When you write this->ID = ID; there needs to be an instance variable named ID in the class, which is what this->ID is referring to.
class Joint {
char ID;
int minPos;
int maxPos;
int pin;
Servo servo;
public:
Joint(char ID, int minPos, int maxPos, int pin) {
this->ID = ID;
this->minPos = minPos;
this->maxPos = maxPos;
this->pin = pin;
servo.attach(pin);
}
};
Something like that. 😄
Ohhhh I see, like how you have to declare variables before using them in the program. That's something that python has spoiled me with
Yes, exactly.
When i create a new object in the class, I want it to create a new Servo, with the name being the ID of the object, does your code accomplish this? I thought I would instead need to do something like this:
That code makes no sense, because this.ID is a char object, so you cannot also make it a Servo object.
So I should make another variable in the class that I can define when I create objects
Well, it depends a little on what you are trying to achieve here. I assume each Joint always has its own Servo? i.e. two Joints cannot use the same servo motor?
Yeah
I have a robot with 12 servos, each controlling a joint. Each joint has its own specific maximum and minimum positions (bound by the construction, not the servo's limits)
I am wrapping it in this class because I want to use my commandJoint function, which prevents it from being moved to a position that is outside the range of the joint (destroying it) and also flips 6 of the servo's movement
Right, so in that case the code I posted, where Servo servo; is an instance variable, is the right approach. Each Joint will now have its own Servo object.
There's no need to have
this->servo = servo; ?
Is this because each object has its own scope, so it doesnt matter that theyre all called 'servo'?
When you write Servo servo; it already creates one. Just like int minPos; already creates the variable minPos. But you do this->minPos = minPos; to overwrite it with the value you actually want. This is not needed for Servo, there you only have to do servo.attach(pin);.
And yes, they will all be called servo but that's OK because they are all in different Joint instances.
Ok, that makes sense, thank you.
Thank you a lot for your help, madbodger too, I really appreciate it. I'm sure I'll be back soon enough though, lol.
Haha, cool.
can arduino pico run led ring
Hi, I'm looking for project ideas on arduino which is useful and cheap. Can you advise me something?
For what purpose, @fringe ruin ?
@sullen scroll It should be able to, however there are many types of LED rings, it should be able to run most of them.
guys, I have the same problem described in this issue:

GitHub
As title. this simple code works perfectly with lib version 1.0.7 if (!boschBME680.begin(0x76)) { Serial.println("Could not find a valid BME680 sensor, check wiring!"); while (1);...
any idea on how to solve or workaroud it? it seems that latest updates broke the lib
Hey! My project consists in an Arduino which controls a LED strip alimented with 12V so I put the 12V alimentation on the + on my breadboard.
I also have a Bluetooth receiver and a SoftwareSerial to link it to the Arduino.
The problem is that now I use an other alimentation, a 12V one for the Arduino. (So, I use two alimentations, one for the Arduino and one for the LEDs).
So I'd like to link the VIN on the breadboard so both the Arduino and the strip use the alimentation.
I tried, but when I do that the Bluetooth Serial begins to bug, receive weird characters except the first one which is almost always correct... And when I use two alims, all works like a charm.
Is my Arduino undervolted? If so, any solutions to use one alim for both or should I use two?
Same alimentation for Arduino and LEDs?
I'm a noob
It's more likely electrical noise from the LEDs than a low voltage issue. You may be able to use some filter circuitry to isolate the LEDs from the other devices, to protect them from the noise or short duration voltage sags.
hi there dont supose anyone knows any good https on arduino resources on the internet on day three of googleing and have had a fix bag of results ?
Possibly that would be specific to what you're using for your internet connection. Doing public-key cryptography on an 8-bit microcontroller is a bit of a pain, so the SSL would be likely to be handled by the chip handling the WiFi, etc.
Is there a way to concatenate multiple things together in a single expression?
This gives me an error, "invalid operands of types 'const char*' and 'const char [5]' to binary 'operator+'. But only when I have it doing multiple at once. If I just concatenate a string + this->ID, or a string + target, it compiles fine.
I'm actually surprised that the single concatenations would work. Unless you're working with the more complex String types that can do dynamic reallocation, C++ wants you to be a bit more hands-on about where the memory is coming from to convert things to text, etc. The simplest solution would be to have separate Serial.print() calls for each piece.
Oh ok, that makes sense. I think maybe it compiles but C++ is not very happy about it, because im getting some odd results from serial monitor currently. I'll try your suggestion and see if it fixes it.
Oh, I see why it was compiling... with a char* and an integer, it was doing pointer arithmetic. So "foobar" + 1 would evaluate to a pointer to the second letter in the string, and it would print oobar. But that wouldn't extend to more operands, and isn't what you want anyway.
Interesting
Well now I'm having a different issue.. somehow, instead of this->ID being "jointFL", it's 7. Which is the length of the string, but if I change the string it stays 7 so I think that's a coincidence
So ID is declared as a char, which means it's a one-byte character value, not a string.
Oh, how do I declare a string?
That would be a char array, like char ID[10] or however long you want it. With the wonders of C minutiae, the length needs to be 1 larger than the contents, to include the 0 terminator character.
Fair warning, you are about to get thrown into a lot of C hassles with strings, so if it is feasible, you might be happier using integer constants for your joint labels and just do something like #define JOINT_FL 3 to make them easier to read in the code.
What does #define do, exactly? Makes it so I can write JOINT_FL and it'll equate to 3?
Yep, exactly. The #define is what's called a preprocessor directive, so it is essentially editing your code right before the compiler sees is to change all instances of JOINT_FL into the number 3. So the human sees the friendly label, the compiler just sees the number, and it doesn't use any memory for a separate variable.
Strings are complicated.
Memory management, fundamentally. Languages like Python can create new strings at will and garbage-collect them when they are done with them, but C is intended to be low level and close to the hardware, so it wants you to understand where everything is in memory, who owns it, and when it gets freed, etc.
C is a pretty old, low level language, basically just a gloss on assembly language. Its string support is just "an array of characters".
Oh, ok. Yeah I guess coming from python I take strings for granted
(And don't even get me started on Unicode...)
The advantage of C is it can use resources efficiently. The disadvantage is that you have to do everything manually.
And being efficient matters when youre on an arduino, I imagine
Yeah. C on an 8-bit microcontroller can compete with Python on a gigahertz desktop CPU, which is really impressive when you think about it.
Heh, I was talking code with a friend over Discord, and it would convert emojis into :smile_cat: which looked the same but broke copy/paste.
We also found out that the Unicode escapes that worked on Linux bash didn't work on MacOS bash.
When using #define do I have to do anything special when I put in my label? because I replaced the original "string" (char) with my label, and now I'm getting a "expected primary expression before ( token" error.
Maybe I'm abusing Arduino, but I do printf when I want to combine different data types and/or have things show up a certain way
Can you show your #define? Possibly you have some extra punctuation in it, like a semicolon, which isn't needed.
Bingo, semicolon.
This is one thing that people seem to love about Rust in comparison to C. The compiler goes out of its way to give you understandable and actionable error messages... "Hey, I expected blah here, but it looks like you have an extra brace up here, on this line, so I got confused."
The problem with routines such as printf or C++ std::string is that they need to be linked into your app, which eats up a lot of Flash memory.
But you can do this: char s[200]; sprintf(s, "Attempting to write %s to %d...", target, this.ID); Serial.println(s);
Well thank you guys a ton for your help. It took two days but I've managed to get a working class. Maybe my robopup will stand up today.
Here's hoping, that looks like a really nifty project.
Thanks
Hello. If I buy 2 the same oled displays, and both of them have the same i2c adress, can i use them? I know that is not possible with the same pins, but if i connect every device to other pin?

" The only bad news about I2C is that each I2C device must have a unique address - and the addresses only range from 0 to 127 (aka 0 to 0x7F hex). One thing this means is that if you have two accelerometers (lets say) and they both have address 0x22 you cannot have both of them on the same I2C lines."
I'm having a problem using an array of bytes in combination with shiftout(), first time through the array, everything works as expected, but every time through loop thereafter, a number that isn't in the array is being shifted out and I can't figure out what's going on

Pastebin
If your processor has multiple I2C buses, or supports a soft-I2C library, you can put those devices on different pins. Or there are I2C multiplexer chips which can be used, too.
if numberToDisplay is declared as an int of 1 and i use numberToDisplay *= 2 % 255 it also works as expected but this is just a test as i want to use an array ultimately
The problem is the i++ % 7 line, which is incrementing i but not applying the modulus back to the variable. You want i = (i + 1) % 7 or similar.
ok, bad parentheses, understood, how is it changing the content of the array?
or is it just spitting out a number because the array index is out of bounds?
Your i is ending up with values of 8, 9, 10, etc. so it's reading off the end of the array, yep.
ok, im a pythoner so i'm not used to getting a response besides an error for out of bounds array calls
@cedar mountain i have found this its on my list to look into ferther https://www.arduino.cc/en/Reference/WiFi101SSLClient
Open-source electronic prototyping platform enabling users to create interactive electronic objects.
thanks very much
No problem, welcome to the wonders of C, heh heh.
i've been arduino-ing for a long time but have been using far more clipcode than anything else. i do like it but it can be frustrating when it doesn't tell you when you did something wrong lol
perfect, the parentheses fixed it
Yeah, it's an amazing language for shooting yourself in the foot... 😅 But I still like it.
also to anyone reading, that modulo should have been 8
Good point, missed that.
good old off-by-one error
guys, I have the same problem described in this issue:
https://github.com/adafruit/Adafruit_BME680/issues/40
any idea on how to solve or workaroud it? it seems that latest updates broke the lib
GitHub
As title. this simple code works perfectly with lib version 1.0.7 if (!boschBME680.begin(0x76)) { Serial.println("Could not find a valid BME680 sensor, check wiring!"); while (1);...
theoretically... if I have a TFT screen and only plug in the GND and 3.3v parts it should at least turn on right?
I am wondering if maybe my solder job is whack. i accidentally touched some of the tape on the connector
There may be a separate backlight-control signal to get it to visibly turn on.
Hello everyone! I'm just trying to understand if a level shifter is needed when an arduino board has a 3.3 V pin. Does this mean it has a level shifter built in? I'm looking to complete this build:
https://www.instructables.com/id/ESP8266-With-Parallax-Serial-RFID-Reader-PN-28140/

Instructables
ESP8266 With Parallax Serial RFID Reader (PN 28140): This simple guide will allow you to interface a Parallax Serial RFID reader with an ESP8266 !
Generally a 3.3V pin on an Arduino is a voltage supply available for powering other chips, but the Arduino pins will still be 5V I/O if the Arduino is otherwise powered from 5V, so you may indeed need a level-shifter for interfacing to some 3.3V devices.
Ah ok.
Its weird because iirc this card reader is a 5v device but the guide im following above wants you to use a level shifter.
The ESP8266 is a 3.3V device
ooh that would explain why im not reading anything
Ah, sorry, my confusion about what you meant by "Arduino".
Yup, the first one is generic and can be bought for $1-2 on ebay. Works great and even has extra serial pins
It's more likely electrical noise from the LEDs than a low voltage issue. You may be able to use some filter circuitry to isolate the LEDs from the other devices, to protect them from the noise or short duration voltage sags.
@north stream
I can't look at it know as I'm at my father's house but I'll look at it thanks
anyone know why serial.println is reading and printing past the size of the char array im giving it?
unless I messed something up during allocation but, this looks correct to me
C strings need a terminating 0 byte to indicate where they stop. The println routine doesn't overwise have access to the size of the array.
No prob. Be sure to allocate room for that extra byte too.
yeah, got it :P
no one using BME680 lib here?
Anyone around familiar with datatypes for M0's in Arduino? Like a feather uses. It looks like ints and words are all 4 bytes instead of 2 bytes, but from what I can see everything else like longs, floats, bytes, chars, and bools all appear to be the same as the 8bit family?
I would do some testing, but im at work trying to revamp some code for when I get to my room, swapped from a 32u4 last night to an M0
and is there a difference between using ints and longs?
Yes. Integers (ints) are signed 16 bit numbers (basically +/- 2^15), whereas longs are signed 32 bit numbers (+/- 2^31).
I had some things saving to an external eeprom, and it used up the available space to the byte. But one of the items was an int. It looks like if I change that to an unsigned short I will be good to go with the same space usage...
@mighty vigil but it looks like with an M0 ints are 32 bit numbers also. It doesn't look like longs change though
My bad, didn't see that you were on M0.
I think I finally see why people write code with stuff like uint16_t instead of int lol
Does anyone know how to use Serial.end() with SAMD21? end() function doesn't seem to stop Serial printing. Simple code below. Note: I am using the SerialUSB object on a SparkFun SAMD21 Mini/Dev Breakout Board.
`void setup()
{
SerialUSB.begin(115200);
while(!SerialUSB);
}
void loop()
{
SerialUSB.println("Hello World");
SerialUSB.println("Hello World");
SerialUSB.end()
}`
@honest obsidian what are you trying to do? is stopping SerialUSB necessary?
I just want to stop my serial outputting without having to reupload code.
how about
`void setup()
{
SerialUSB.begin(115200);
while(!SerialUSB);
SerialUSB.println("Hello World");
SerialUSB.println("Hello World");
}
void loop()
{
}`
i think .end only resets the serial, so it keeps looping
or if you need it in loop put the print statements in a for loop and use a flag variable with if
i think
.endonly resets the serial, so it keeps looping
@reef ravine It stops the print output altogether on the Arduino Uno. I think the difference with the SAMD21 is due the native USB port, so the end() function just doesn't work as is intended.
or if you need it in loop put the print statements in a
forloop and use a flag variable withif
@reef ravine I was trying to avoid this workaround, but after doing a bit of Google-ing, this appears to be my only solution. I appreciate you for chiming in.
i get this error message ever and ever again does anybody knew what it means ?
@cold lagoon That looks like your program is too large to fit in the Arduino's memory.
by 1056 bytes
@lone ferry but it is just marlin
I don't know what that is.
thats a 3d printer firmware. manny people have uploadet it to a board
Ah I see. But did they use a board with an atmega1284p? Or was it another processor?
my board has an atmega128 (anet a6 board) i have seen manny tutorials how to upload marlin on to it
But thanks for the tip, I'm at least one step further 😄
Maybe you need to explicitly enable support for the atmega128?
i belive it is because i enabeld an extra option in the code and now it is to big
maybe i dissable some other options i dont need
Yes, that sounds like the likely cause -- and the solution 🙂
and i needet one week to find out :/
ok i disabeld sd support now it works THANK you
hello, i made a variable called Score and i put this code so if a button is pressed and 2 other variables which are called randomNumber1 and randomNumber2 = the same value to add a point in score and i also put a thing to make the serial print write the score but when i open the serial print, it keeps on adding a point even if i don't press the button, can someone please help? thank you! sorry if my code is long
https://hatebin.com/zrvugghqfb
@north stream how is your button wired? it will always print score since the print is in the loop.
@reef ravine what do you mean?
Serial.println(Score); is executed every time it loops
but i put only add the score when randomNumber1 and randomNumber2 = the same value
then the print should happen only in that if block
so i did something wrong?
not "wrong" just need to change your code so it does what you want
how do i fix it?
if (button == true); { if (randomNumber1 == randomNumber2); { Score += 1; Serial.println(Score); }
then it only prints if button is true
and random 1 = random 2
that's what i have
not what you pasted
but i put the serial println in a different area
but ill put it in the same area anyway
still makes no difference after i fix it
is button always true?
is the print still up top in the loop?
ok, then the 2 numbers must be the same or it wouldn't print
it should only print IF button = true AND random 1 = random 2
can i call you if you have no problem?
yep
add Serial.println(randomNumber1); and Serial.println(randomNumber2); above if button
ok
Note the semicolon after the if clause... The following code is always executed.
i did
good catch, if (button == true); { should be if (button == true) {
add
Serial.println(randomNumber1);andSerial.println(randomNumber2);above if button
@reef ravine i did it
and remove the extra ;
from where?
look up^^^
like this?
remove the ; after if (button == true)
now it should print when rand 1 = rand 2
now it should print when rand 1 = rand 2
@reef ravine its not
except you have an extra ; after the second if
ok, the button is from pin 3 to ground?
yes
make pinMode(button, INPUT); to pinMode(button, INPUT_PULLUP); and change if (button == true) to if (button == false)
I know I could’ve used a rib but I didn’t
make
pinMode(button, INPUT);topinMode(button, INPUT_PULLUP);and changeif (button == true)toif (button == false)
@reef ravine okay
i did it
still not working
so if the button is pressed AND rand1 = rand 2 it should print
so if the button is pressed AND rand1 = rand 2 it should print
@reef ravine should i do that?
does it do that?
in the serial print?
yes IF the button is pressed AND random1 = random2 THEN it should print
its not printing
please paste what you have now
in the serial print or my code?
the code that is running now
it won't paste like you did it before? or use pastebin.com
i see what's wrong, 1 sec
okay
int value = digitalRead(button); if (value == false) { if (randomNumber1 == randomNumber2) { Score += 1; Serial.println(randomNumber1); Serial.println(randomNumber2); Serial.println(Score); } }
do i need to change my code to that?
yes, button always equals 3 as it is written now
it already = 3
yes but we want to know the state of the button connected to pin 3
yes but we want to know the state of the button connected to pin 3
@reef ravine what's the state?
if (button == true) means if 3 = true
you need to digitalRead the button (pin 3)
then value will be true or false depending on if you've pushed the button
change the lines starting at 131 to the above code block
what do you mean?
in your link there are line #s on the left side
in your link there are line #s on the left side
@reef ravine yah
put int value = digitalRead(button); on line 130, change 131 to if (value == false) {
We're happy to answer questions and help you debug problems, but you have to ask one first. 😉
yep
thank you 🙂
im trying to make a very simple board game
with 8 leds in a line
when i press a button a random number between 1 and 6 gets chosen and the
turn on respectively
ive done that so far
and works fine
but what i want to do next is make it so if i get a random number again by pressing the button it adds up to the leds that were already turned on
theres other stuff too but thats the fist thing i want to do
I don't quite follow. You want a random number, but you want the number to equal the number of previously-lit LEDs?
kind of like a dice
here
the first time you press it, the number you got (1-6), gets lit on the leds
so lets say i get 6 so 6 leds turn on
if i get 2
i win
if i get more than 2 the turn doesnt count
or if i get 1 then it adds up and ill have 7 leds turned on
Oh, I see. The easiest way to do that would be to have a variable with the current number of LEDs lit, and each time the button is pressed, add the random number to it, and then light up that total number of LEDs.
so like using void?
i used it on the dice i have already but you mean to use it again?
Like the butonator variable you have. You'd have like: ```int total;
total = total + butonator;``` and then use total to light up your LEDs in a loop like you do now.
ok ill try that
@cedar mountainToday at 2:55 PM
Note the semicolon after the if clause... The following code is always executed.
thanks for catching that and I learned something, i would have thought that would have thrown a syntax error
Yeah, it probably should, or at least a warning... Not a good reason to ever do that on purpose.
hey it didnt work 😭
may i share my work with you?
maybe you could show me what you meant
im using tinkercad at the moment since i cant go buy an arduino
Sure, you can use Pastebin or something to share code if it's too large to show here. What is it actually doing or not doing?
right now it doesnt add the numbers to turn on more leds
i tried a few other things too
the main code is on arduino uno (1)
Can anyone tell me if I can use digital pins on
arduino uno for hc-06 bluetooth tx and rx
using its RX and TX you need to disconnected everytime you reflash it
You will need to use a software-serial library, but if you do, then any pins will work.
Yep, you just tell the library which ones you want to use.
so something like this? ```#include <SoftwareSerial.h>
SoftwareSerial mySerial(2, 3); // RX, TX```
Thanks @cedar mountain
hey edkeyes thanks for the help
i tried using another way tho cause it became a bit difficult and i think i made it ok
it works as intended at least
do you guys know how i2c works tho?
i think i want to make my game turn based with two players
ok
Hello, I have some code I found online for a NodeMCU that I found online, I wanted to know if it is possible to use the same code on an Arduino Uno with an ESP-01.
hey i have a problem with my rfid reader i use many different programs and libraries but still doesnt work, pins are conected properly and the lights on the rfid is on, but still its saying me its doesnt connect properly
@rugged smelt post a picture of your wiring
if the rfid read is 3.3v logic then it might not work with 5v logic of the arduino.
even if i connect it into 3.3V on arduino?
yes. 3.3v for power is correct, but the logic signal of arduino is still 5v.
would be easier to get an esp8266/nodemcu type board to use with rfid because esp is all 3.3v logic.
but it might also just be wrong wiring.
@sinful estuary probably not.
I'm quite new to this and I'm just learning, thanks for the help
what
i need help with my program and circuit
show
i tried to make a self balancing object avoiding robot
the circuit is on fritzing
the problem is coming with ultrasonic sensor i believe
its not gining output
sorry i cant help you with that im not at the same level of programing
nope im at this server 1,5hour XD
lol okok ty
STRIPS[] = { &STRIP1, &STRIP2, &STRIP3 };
this will ALWAYS start with 0 right? is there anyway i can make it start at 1?
Index the array with STRIPS[i - 1] if i starts at 1.
Or if you don't mind wasting some memory, write STRIPS[] = { 0, &STRIP1, &STRIP2, &STRIP3 }; so that 0th element is there but isn't used for anything.
@lone ferry how much does that extra 0 add in memory actualy? :S
@elder hare It looks like these are all pointers, so 2, 4 or 8 bytes depending on your platform.
so nothing 😛
Hey guys I'm new to electronics and Arduino and I am having some issues with a stepper motor and driver, hoping someone here can help me figure out what I'm doing wrong.
I have this (FL42STH47-1204A) stepper motor (1.2amp 1.8deg stepper motor) driven by a Polulo A4988 stepper driver.
I set the Vref voltage to 650mV according to the specifications (VREF=8⋅IMAX⋅RCS). The driver is also set to 16th micro stepping.
The issue I'm having is that when stepping the motor, it stalls really easily by even light friction by my fingers. There's no torque to the motor. But if i let the motor start spinning slightly first then I cant stall it no matter how hard i try to hold back.
Why is there no torque in the initial steps of the motor?
@elder hare Yes, the extra space is basically nothing. On Arduino it's just 2 bytes. But sometimes you run out of space and then you might need those 2 bytes. 😉
any tips for transforming bytes into text?
i wanted to use i2c for a turned based game but i went for software serial instead
tho i can only send characters not a string
but i want the other arduino to read it as "your turn"
and vice versa, the other arduino sends it two when he is finished
@solar grotto , couldn't you just have it listen for a specific character that isn't likely used anywhere else, and which could indicate "end of turn" to pass it over to the other? In the early days of serial computing, the same was accomplished by the inclusion of non-visible character values for things like "eof" (end of file), or by making use of the difference between a "return" (or new line), and "enter".
I am looking for advice, tutorials, links, code, or examples to figure out how to do the following:
I have two sketch files which work similarly, but giving different behavior. They both illuminate LEDs where the brightness dependent on the input values from an analog joystick.
What I would like to do, is to figure out a way to use a momentary pushbutton to alternate between the two different behaviors. Both sketch files leave plenty of room to combine the two with memory to spare.
Sketchfile1:
Illuminates LED1 as the joystick is pushed upward, LED2 as it is pushed to the right, 3 is downward, and 4 is left.
Sketchfile2:
All LEDs start at 50%, LEDs 1&3 dim when the joystick is pushed left, and brighten when pushed right. LEDs 2&4 do the same but with upward and downward joystick motion. (Imagine 0-100% from left to right, but the centering rests at 50%).
Hi ,I'm trying to use the adafruit esp8266 Mqtt code on esp32 with necessary changes.
This is my code
https://pastebin.com/vsgzqNV2
I'm trying to connect to my hassio Mqtt broker with topic "test1".
Wifi gets connected ,then Mqtt gets connected but after that ,any new publishes to the topic are not detected .
Any help would be appreciated
@undone bridge The answer to that is the microstepping itself. Microstepping takes a full step of the motor and turns into a bunch of smaller steps by controlling the amount of current to the A & B phases of the motor during the stepping process. There are times when this current is very low. Low current = low torque.
@wanton shuttle hm.. right, is there any way to calculate the theoretical torque when micro stepping to 1/16 when the rated full step torque is 441mNm?
@tacit plaza Try setting a "flag variable" when the button is pressed. Put each behavior in a function. IF flag is low THEN function 1 ELSE function 2. Toggle the value of flag on each button press.
I have found some examples for changing state which seem to apply, but to prevent bouncing they all use a delay, and no examples showing how to do so with any other inputs. So where should I put the delay, where it would not delay between joystick input changes?
@undone bridge I believe this formula is the one you would need...
see the "blink without delay" examples, by using millis and comparing times the code doesn't "block" while it sits there doing nothing during delay, this looks like what you need https://www.arduino.cc/en/tutorial/debounce
Open-source electronic prototyping platform enabling users to create interactive electronic objects.
@wanton shuttle Thank you, ill look into it 👍
Wow, 10ish percent at 1/16, no wonder i can stall it by breathing to hard on it 😛
@reef ravine , so going by that example, I could then add my code in place of where it says, " // set the LED", and have one block encapsulated with:
if (mode == 1)
{ "act in this manner" }
if (mode == 2)
{ "Act this way instead" }
(initializing "mode" in setup, of course. )
that is the basic idea yes, i'm at work now so can't dive deep
No sweat. That's been a great help. Thanks!
@undone bridge Your welcome.
hello guys, does anyone use the Kalman filter with the MPU6050 ???
@stable perch I don't, but if you're trying to decrease noise, I'd recommend using a moving average. I've used a n=50 moving average with an LIS3DH that worked quite well. Here's a study that uses the Kalman filter with the MPU6050 https://www.sciencedirect.com/science/article/pii/S1474667016336977 that might be helpful
Hello again, I'm having a bug with an RFID reader. Basically when I scan a card, it 'reads' it twice because of how the serial is saving or sending...? the card code. Is there a way I can clear the serial available return value?
Just read it in a loop until there's nothing more available.
But thats what causes it to read the same value 'again'
and that opens the door twice
No, I meant, if you want to clear the buffer, read it and throw away the values.
How would I do that? Is there a method I would use?
Ooh I didn't know cpp did that (coming from python xp)
When driving servos with an arduino, but with external power, do you need to connect the ground of the servos to the ground of the arduino?
yes, without a common reference the control signal won't drive the servo
Because when I try and do that, the arduino shuts off and becomes unresponsive until I disconnect the grounds
Hi everyone, I just had a strange problem with 2 adafruit boards, I uploaded a test program to my grand central M4, changed something and when trying to upload it just says "uploading" forever.
I then tried uploading the same program to an itsy bitsy m4, it uploaded fine and then suddenly said usb device not recognised
I tried both boards on a different computer but am having the same problem. A second itsy bitsy works fine on that computer.
@formal onyx i'd suggest double checking your wiring, only the negative lead should be in common https://www.instructables.com/id/Arduino-How-to-Use-a-Servo-Motor-With-an-External-/
Could it be because I am driving the servos at 6.2v, not 5v? That shouldn't matter to the arduino, though, would it?
The arduino is being powered off USB, not the 6.2v
Huh, its working now. That's odd. I guess I wont complain
Must have been cosmic rays or something.
Is there any short, easy, efficient way to convert serial input from ASCII value to text characters? I cannot seem to find any specific functions to do so, and trying to define each character based on value would consume too much memory.
It's the same thing, really. What are you really trying to do?
Is there a way to prevent servos from going to a random position when theyre first powered on? Each time I reupload to the arduino, even if the degree I'm writing stays the same, the servos jump to a seemingly random position before going to their written position
It's a big problem because theyre physically restrained to operate in about 70 degree areas, so while it is limited in software theyre going outside where theyre supposed to and its going to break if it keeps happening
That's two different things: power on and upload.
@north stream , when sending through serial, the Arduino sees it as the ANSI numerical value. I would like to find out if there is some way to convert those values into more human-readable characters, instead of memorize ASCII values to know what letter a value represents.
Sorry, I meant ASCII not ANSI, that was a dyslexic typo.
Again, they're the same thing. If you receive it into a char type buffer, the print() routine will recognize that it's a character and print it. If you receive it into something else (like uint8_t or byte), the print() routine will interpret it as a number.
You could, of course, cast it: Serial.print((char) myvalue);
Thanks. That's what I was looking for, I think.
Or rather, forgetting to cast to char before assigning the value to variables.
I guess by default, it gives the raw ASCII numerical value.
It's really the same 8-bit value. It's just how print() decides to output it, depending on the variable type.
It works now. Thanks!
Whats the cheapest board that does HID usb
for acting as a keyboard specifically.
it's not clear to me if the trinket does this
The Trinket M0 should be capable of it.
If anyone is curious (or has a similar issue in the future) I fixed my servos going to random positions at powerup by controlling the power with a relay, and writing my first positions to the servos BEFORE even powering them on. Then when theyre powered on they move right to where they should.
Anyone know what this issue could be?
@lyric echo wiring or incorrect lcd initialization?
I made sure the wiring is correct, il send some code maybe i did somethign wrong.
#include <LiquidCrystal.h>
LiquidCrystal lcd(11, 10, A0, A1, A2, A3, A4);
void setup()
{
pinMode(A5, OUTPUT); //LCD display
digitalWrite(A5, HIGH); //LCD display
lcd.begin(16,2); //LCD display
Serial.begin(9600);
}
what is A5 for?
11 into RS, 10 into RW, A0 into E, A1 A2 A3 A4 into D4 D5 D6 D7
A5 is for A
I have a 1k OHM resister for A5 to A
do you have a link for your LCD?
set A0 - A4 with pinMode(Ax, OUTPUT);
in setup()
you can use analog pins as digital but you need to set them up first
can the Arduino Mega accurately measure time to the hundredth (possibly even thousandth?) of a second? I want to program essentially a stopwatch that triggers based on a sensor and displays the time (up to 9.999 seconds).
I'm still a bit of a novice at arduino, can the Arduino Mega do this? would it require any additional parts for accurate time-tracking?
@marsh cloak the millis() function measures 1/1000 (milli seconds), it should be doable
this might be a place to start https://create.arduino.cc/projecthub/AzureDragon/stopwatch-using-arduino-52b99e
🍕 time...
@reef ravine I tried it and its still the same
Is anyone using a SIM7600? If so, what carrier are you using?
I made a circuit set in circuit.io for a flyball stopwatch. https://www.circuito.io/static/reply/index.html?solutionId=5ef295cfce5e950030ae5274&solutionPath=storage.circuito.io
Instead of the 3mm ir break beam sensor, I would like to use this : https://www.amazon.com/gp/product/B07G29YN56/ref=ox_sc_act_title_4?smid=A3UAIR0DYVQQPY&psc=1
And if possible, power the project with 8 AA batteries. Are there any possible problems or concerns with this? Should the power supply be sufficient? Will the larger sensors wire in about the same?
@marsh cloak Looks like you are on the right track. I'd suggest looking into an 11.1v LiPo battery for longer life (all those 7 segments will chew through AAs).
I might be a little worried about the response time of the beam-break sensor. To avoid false positives from a falling leaf breaking the beam or something, they might have a low-pass filter on the output that would delay the response by some number of milliseconds.
@cedar mountain The goal of the sensor is to detect dogs running through the gate to start the timer, and running back through it to end the timer, with probably an average total time of 4 seconds. So long as I don't need to measure times totaling below 1 second, should I still worry about that delay, or could the delay be worked around? More important than accurate timing is consistent timing across every use.
@marsh cloak since the sensors are designed for security they may have some built in delay to prevent false triggering, perhaps 100's of milliseconds.
I didn't understand the use case... I thought you were timing baseballs or something needing more precision.
The example was a fly ball timer, @marsh cloak is timing dogs through a gate around an obstacle and back through the gate
Sorry, making it for my sister who does dog agility training, she described it as being a "flyball dog racing" timer. i could have been more clear 😅
is 100ths good enough?
1000ths is ideal, but so long as it can accurately do 100ths that should be good enough
then the concern is the one @cedar mountain mentioned, those sensors may have some built-in delay and it'll be hard to know what delay.
Apologies for interrupting, but does anyone know where I can buy a Bluetooth module for my arduino, because I've had no luck with the current modules that I have purchased. I also need it to connect to my Samsung phone without the requirement of an app (such as "dsd tech" HM-10).
shouldn't the delay be consistent? the timer doesn't need to be consistent with other timers, it merely needs to be consistent weith itself
may depend on temperature / humidity / dust...
hour to hour should be close
day to day maybe not so much
not that it can't be done, just you won't know the precision without some tests or better data than you are likely to get from the manufacturer.
I am using esp32cam and arduino uno
When I want to upload code I got
Invalid conversion from 'const char*'
So I chang char ssid[] = ""
But in this time dosen't connect wifi and doesn't show my my http id
Could some one help me
Hi everyone, I have a problem with my Grand central, I was busy uploading and modifying an Arduino sketch when the computer suddenly said "usb device not recognised". It did this before and I just pressed the reset button twice and it would work again. Now when I do that the neopixel stays red and the red "L" led continues to fade in and out. Any ideas?
Does it show up as a USB storage device @forest lark?
Hi, no it does not
"Windows has stopped this device because it has reported problems. (Code 43)
A request for the USB device descriptor failed."
Okay, try another USB port on your computer, then try another cable, I have found the same issue can happen with iffy front panel USB
I tried different working cables, ports and computers
Then while the red LED is on, I would try one more time to upload the blink example from arduino, this will probably not work but the next step is reflashing the bootloader if nothing else is connected to it.
Though if your red LED is going in and out, with a red neopixel, nothing should be wrong with the board, it should work
running windows 10, no extra drivers installed
the sketch that is on it is still working
Well idk about any OS related issues, I dont touch windows with a 10 ft pole, but if it wont show up as mass storage it should be fine. USB is not being established between the computer and board
To any extent
https://www.robotics.org.za/JLINK-OB-ARM?search=jlink will this work if its the bootloader?
JLINK OB ARM Emulator, Debugger and Programmer
In theory, but if you have a Pi already I find those + OpenOCD to be the better tool, most of those programmers I try are buggy
Thanks, I only have arduinos and 2 other itsy bitsy boards
I still think its a USB port + cable issue, Im taking your word you tried a different computer with a different cable.
I mean, a Pi Zero W is $10, and you can do a lot more with it when you're done, sounds like it to me. Unless someone else here has another good troubleshooting step I think thats where you're at
Thanks, I just uploaded the blink example to an itsy bitsy m4, but the grand central still does nothing
Darn, when did you buy the grand central?
MIcro Robotics, its in South Africa
oh when, a month ago
on the 21st of last month to be exact
Hmm, I think you may have a board made last year if you're having a bootloader issue
Might be two years now that I think about it
could be, there is 1119 printed on it next to the debug port. November 2019?
idk, maybe, I thought they fixed the bootloaders before that but it might have been December of 2019 not 18
it is a beta edition
Idk, next time you get a M4 board in South Africa, before this happens try to update the bootloader to lock it
ok, thanks for all your help, really appreciate it! Looks like I will be ordering a PI
Just double tap the reset button, when it shows up as a USB storage device just drag over the newest UF2 file for your board. And no problem, happy to help, sounds like a plan
I just updated the itsy bitsys, there were both on v2.0.0, now 3.10.0
I bought them on the same order as the grand central
hey guys !
which kit is better for a starter
this is kit 1
this is kit 2
<@&617066238840930324>
Those links both return "Forbidden
You don't have permission to access this resource."
omg sorry my bad
1 X Button Switch with caps
1 X Remote Control
1 X 4 digital tube
1 X 88 Dot Matrix
1 X 1 digital tube
1 X Stepper Motor
1 X ULN2003 Driver
1 X 9g Servo
1 X IIC 1602 LCD Module
1 X Joystick Module
1 X Temperature Module
1 X Water Sensor
1 X RFID Module
1 X RFID Key Ring
1 X RFID Card
1 X Sound Module
1 X 1 Channel Relay Module
1 X Clock Module
1 X 44 Keypad Module
1 X RGB LED Module
1 X 9V Battery Clip
5 X 1K Resistor
5 X 10K Resistor
8 X 220R Resistor
this is the kit A
Package Included:
1 X Remote Control
1 X Electronic components box
1 X 830 Tie point breadboard
30 X Male to Male Jump wires
1 X 10P female to female jump wire
1 X 4-digit digital tube
1 X 1-digit digital tube
1 X 8*8 Metrix module
1 X ULN2003 drvier
1 X DIYmall uno r3
1 X Protoshield with breadboard
1 X 1602 LCD
1 X USB Cable
1 X 40P pin header
1 X Stepper motor
1 X 9g servo
1 X Active buzzer
1 X Passive buzzer
4 X Switch button
4 X Yellow switch button cap
1 X Battery box
5 X 5mm red led
5 X 5mm yellow led
5 X 5mm blue led
5 X 1K resistor
5 X 10K resistor
8 X 220R resistor
1 X Adjustable resistor
1 X HDX Tilt sensor
3 X Photoresistor
1 X Flame sensor
1 X Infrared reciever sensor
1 X LM35DZ temperature sensor
1 X 74HC595
1 X Plastic box
this is kit B
which one is the best for a starter
Is there something like MCP3008, but smaller? I thinking about ATTINY85, but I need programator for it and if i will want to change code in future, i will have to unsolder it.
Hey guys, i'm new to arduino and programming in arduino language (C++?)
I have two stepper motors, each driven by a Polulo A4988 stepper driver, and i need to program both to move with a PS2 type joystick. I also need both motors to be driven simultaneously depending on the joystick direction.
Any tips/pointers would be helpful.
@errant geode Are you looking for an ADC or a microcontroller? How many channels?
@distant plinth - either kit would be fine for a starter... there are enough bits and pieces in either kit to get you going... just choose the one which interests you the most... and in the long run you will acquire additional parts to feed any further interests you may have.
which parts come only with only one of them
i want to know them to see if i need them @spice nacelle
I don't understand what you mean ...
@cedar mountain I am looking for ADC, but smaller than MCP. I think that i can program attiny, so it reads data from 3 analog pins, and send it to main board by serial on 2 pins that left. (3ADC+2SERIAL+5V+GROUND+RESET=8)
@spice nacelle i meant : what are the bonus electrical components that i get with kit B
You should do a venn diagram 🙂

Using a Venn Diagram, students identify similarities and differences between two things by listing certain features in a chart containing overlapping circles. Venn Diagrams can be used to summarize, compare, or comprehend information.
Teach for Life is a global movement of pe...
ok i understand u
@undone bridge You get your motor torque issue figured out? lol.
@undone bridge this should help get you started
@errant geode I mean, there are a ton of ADCs out there if you search Digi-Key, down to millimeter size. I'm not sure what other design constraints you have, though.
1 X Button Switch with caps
1 X Remote Control
1 X 4 digital tube
1 X 88 Dot Matrix
1 X 1 digital tube
1 X Stepper Motor
1 X ULN2003 Driver
1 X 9g Servo
1 X IIC 1602 LCD Module
1 X Joystick Module
1 X Temperature Module
1 X Water Sensor
1 X RFID Module
1 X RFID Key Ring
1 X RFID Card
1 X Sound Module
1 X 1 Channel Relay Module
1 X Clock Module
1 X 44 Keypad Module
1 X RGB LED Module
1 X 9V Battery Clip
5 X 1K Resistor
5 X 10K Resistor
8 X 220R Resistor
kit A
1 ADUNIO UNO R3 1
2 44 Matrix Keypad 1
3 5V Relay 1
4 Step Motor 1
5 Temperature Sensor LM35 1
6 Motor 1
7 IR Receviver 1
8 Vibration Sensor SW-520D 2
9 Jumper Cap 4
10 Key Switch(yellow) 5
11 DHT11 Module 1
12 Clock Module 1
13 Big Sound Module 1
14 Water Module 1
15 photoresistance 3
16 Active Buzzer 1
17 SN74HC595 1
18 LED sensor 3 Color 1
19 7 Segment 1
20 4 7 Segment 1
21 Passive Buzzer 1
22 B10K Variable 1
23 Flame 1
24 SG90 Servo 1
25 1602 Display 1
26 88 Matrix 1
27 830 Breadboard 1
28 Joystick 1
29 USB Cable 1
30 RFID Module 1
31 Remote Control 1
32 Blue LED 10
33 Green LED 10
34 Red LED 10
35 330R Resistance 10
36 220R Resistance 10
37 10K Resistance 10
38 1K Resistance 10
39 Jumper Wire 1
40 F-M Dupont Wire 1
41 9V Battery Cable 1
42 2.54mm 40Pin 1
43 Firm Packing 1
44 Resistance Card 1
45 module ultrason 1
46 CD d'apprentissage
kit C
which one is better
kit A is cheaper than Kit C
which kit is better for a starter ?
sorry about my annoying questions
They both come with an LCD and dot matrix, and keypad, which is nice. Kit C has an Arduino, breadboard, servo: a pretty good start. Kit A has a motor driver.
1 X DIYmall uno r3
1 X USB Cable
1 X 65pcs Cable
1 X 830 tie point breadboard
15 X LED
1 X Dupond Cable
1 X Potentiometer
1 X Active buzzer
1 X 74HC595
1 X Infrared Receiver
1 X LM35
1 X Flame sensor
1 X Ball Switch
1 X Photoresistance
kit A has these components as well
@north stream
which one has the best value
Just make up a spreadsheet, match like to like, and pick out what's important to you.
which things do u think that are essenitial and come only with one of these kits ?
@wanton shuttle haha yes I decided half step is plenty for my use. A little jittery on low speeds but I can fix that with some gears to be able to run at speeds where it's not an issue
@north stream
@undone bridge this should help get you started
@wanton shuttle thank you so much, I will look at it closer when I get home 👍
@undone bridge no problem👍
@wanton shuttle It worked! Just tweaked it a little, now i just need to add an acceleration/deceleration curve.
I looked at AccelStepper library but that one only supports acceleration/deceleration on predefined movements 🤔
hey all, my brain died, I just need to do url encoding and pulling a single letter field value(field is longer, the value is only one char, and I am using index of and substring to pull it arduino int fie//this for loop just makes this setup a little bit easier. cycles through all the url encoded fields. for(int i = 0; i <= 29; i++){ if(i<10){ //if it is less than 10 the total chars used is 3 int fieldIndex = header.indexOf("l"+i+"="); String diodeColor = header.subStringOf("l"+i+"="); //pull the value from the field for that LED led[i] = diodeColor; } else{ //greater than 10 the total chars used is 4 int fieldIndex = ((header.indexOf("l"+i+"="))+1); char diodeColor = header.subStringOf(fieldIndex,(fieldIndex+1)); led[i] = diodeColor; } } this is technically c++ because its a arduino program using a rest api with a esp32 and esp32's don't tend to handle raw json bodies well so I am using url encoding and that means i have l0=b,l1=r,l2=g etc for 30 leds and fixing color values to them so I made a for loop that will fix a value easier.... can't remember if int fieldIndex = ((header.indexOf("l"+i+"="))+1); char diodeColor = header.subStringOf(fieldIndex,(fieldIndex+1)); would using header.subStringOf(fieldIndex,(fieldIndex+1)) attempt to unsuccessfully make diodecolor(a char) into a string?
@undone bridge Awesome. Under File-Examples-Stepper, you will fine one called "stepper_speedControl. " That may help you to get an idea on how to speed control a stepper from an analog value.
Speaking of clock projects on Show and Tell today, any tips for handling DST with the RTC lib? I just reset the clock twice a year, but there must be a more elegant way... 😉
haha, @worthy thistle was just talking about this
Yeah. Coding it from scratch is non-trivial. I thought about doing a halfway solution and adding a pushbutton switch that, when pressed and held for N seconds, would toggle between adding an hour to the displayed time or not.
Just a quick question:
Can something like pins A2 and D2 be used in the same project?
Yes, they're different.
Heh, yes, this DST issue has bugged me for the three years I’ve been using the Arduino based clock I built.
That's what I was thinking, but wasn't sure. I was working on combining two different sketches into one, and between the two there would be two lines stating:
const int buttonPin = 2; // digital pin for Joystick button
const int joyX = 2; // Analog pin for Joystick X value
The analog pin needs to be referred to as A2, which will be a header constant that evaluates to its real pin number.
(Although often libraries will try to detect that error and correct for it.)
Does D2 need to be specified, or ok as long as analog pins are specified? Also, would it be good practice (in my case) to always use A to prefix analog pins, for purpose of saving code snips for future use?
I'm not sure if there is a D2 constant, just 2 is typical. And yes, it's good practice to use the A prefix.