#circuitpython-dev
1 messages · Page 162 of 1
I'd like to see these renamed to binascii and hashlib to match CPython too. Please verify they are strict subsets of the CPython versions too.
I'm a little wary of using callbacks because it is a form of concurrency. Overall I like the API though.
In general, lets not get too hung up on the API. We can evolve it as we learn what we need. Remember we can potentially have two or more APIs: 1) a low level API that is the minimum the C needs to expose and 2) a user-friendly API (or more) that are for specific use cases.
Audio output is supported but we still need to implement audiobusio.PDMIn.
CircuitPython only maintains the atmel-samd and esp8266 ports. The rest are here to maintain compatibility with the MicroPython parent project.
Might be time to add nrf to the readme 😉
It also seems that in the esp8266 port readme all mentions are to MP not CP
Ok then, I will try to get something going then and we'll see how it will end up looking :)
Each board is snake tested by Blinka the #circuitpython-dev snake @river quest https://www.adafruit.com/product/3382

This is a product page for a chip! We thought we'd set up a place for everyone who's as excited as we are for the new Microchip ATSAMD51 chip to read about it, learn about it, and ...
Good that she's defanged 😃
Awesome! Thank you!
On Fri, Apr 13, 2018 at 3:04 PM arturo182 notifications@github.com wrote:
Ok then, I will try to get something going then and we'll see how it will
end up looking :)—
You are receiving this because you commented.
Reply to this email directly, view it on GitHub
https://github.com/adafruit/circuitpython/issues/586#issuecomment-381271568,
or mute the thread
<https://github.com/notifications/unsubscribe-auth/AADNqYi9vs5UqA_vJpt3eMg-EIangmHnks5toSDtgaJp...
@tannewt how strict are we about strict subsets? For instance, within ubinascii the function names are a strict subset
>>> import ubinascii
>>> dir(ubinascii)
['__name__', 'hexlify', 'unhexlify', 'a2b_base64', 'b2a_base64']
but I quickly found that CP is more loose with type requirements than CPython3. CP:
>>> ubinascii.hexlify('12345')
b'3132333435'
Python 3.5.3:
>>> binascii.hexlify('12345')
TypeError: a bytes-like object is required, not 'str'
Si...
Ideally we'd throw the same error. The goal would be that CircuitPython code will run in CPython just fine.
hi guys
what difference between circuitpython and micropython?

GitHub
circuitpython - CircuitPython - a Python implementation for teaching coding with microcontrollers
In general, circuitpython is focused on beginners while micropython is for advanced and industrial users
@slender iron understood, thank you
no problem 😃
if I have stack fragmentation problem in micropython, I beginner or not?))
http://dpaste.com/0R31YZA output micropython.mem_info(1)
17 Kb free, but a = bytearray(3500) is maximum, >= 3500 give memory allocation error
I think using dictionaries in micropython -> bad idea
this is example
circuitpython has some allocation changes that can help reduce fragmentation
hm, it's interesting, maybe I try it
what mcu are you running on?
esp8266
Okay, let's consider this to be in hold until I can work on making the module more cpython3 compatible. It'll be 2 weeks minimum.
@onyx hinge do you want to get that PR and follow up with the CPython stuff?
I didn't mean to block you on it
@astral spoke I don't know what your problem is
My problem - in random time some function got memory allocation error, current firmware have about 350 lines of code
@slender iron waiting on it is fine with me, I won't be doing CP while I'm on the road anyway.
Maybe I need remove all dictionaries from code and move all keys from dictionaries to variables, but I'm not sure about it.
@onyx hinge kk, have a good trip! gonna be in NYC?
@astral spoke variables are stored in dictionaries too
@slender iron US Southwest, visiting some national parks
even better! my parents just got back from there and had a great time
maybe I need to use ustruct module for lists and integers
¯_(ツ)_/¯
@astral spoke like tannewt suggested, i would maybe break that 3500 into smaller pieces if you can. micropython is probably trying to allocate a single block for the whole thing, which is giving you problems. although, if the issue is arising as your code continues to run, i'd look for a memory leak or an ever-growing variable...
Purr is coming along nicely, I'm sad to have to pause while I have momentum. https://github.com/jepler/purr

@onyx hinge you'll come back fresher and be able to dive back in
@raven canopy I have only one list and function clear it when len(listName) >= 10
@onyx hinge and remember, "it's a dry heat". 😄 ☀
@astral spoke how many imports do you do?
@astral spoke how large are the list items? len(listName) >= 10 == list[1,2,3,4,5,6,7,8,9,10,....]
dict with 3 keys in each element of list
I think it small
imports http://prntscr.com/j50420

Its 256b on M0 and 8k on M4 to match flash erase sizes.
Fixes #758
so list could get to:
list[{'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}, {'1': 1, '2': 2, '3': 3}]
could you get away with a smaller list size; say 8?
also, if you're only using the same 3 keys for each item, i would dump the dictionaries and just iterate through list indexes: list[ [0,1,2], [0,1,2], ...]
gotta run real quick... later peoples.
@raven canopy I will try, thank you
The resulting firmware doesn't boot, whether built with gcc version 5.4.1 20160919 (15:5.4.1+svn241155-1) or gcc version 7.2.1 20170904 (release) [ARM/embedded-7-branch revision 255204] (GNU Tools for Arm Embedded Processors 7-2017-q4-major). Rather than resetting into CircuitPython, it just resets into a loop that executes a 'wfe' instruction forever. It looks like the interrupt vector table is just not there!
This may be upstream bug https://sourceware.org/bugzilla/show_bug.cgi?id=2250...
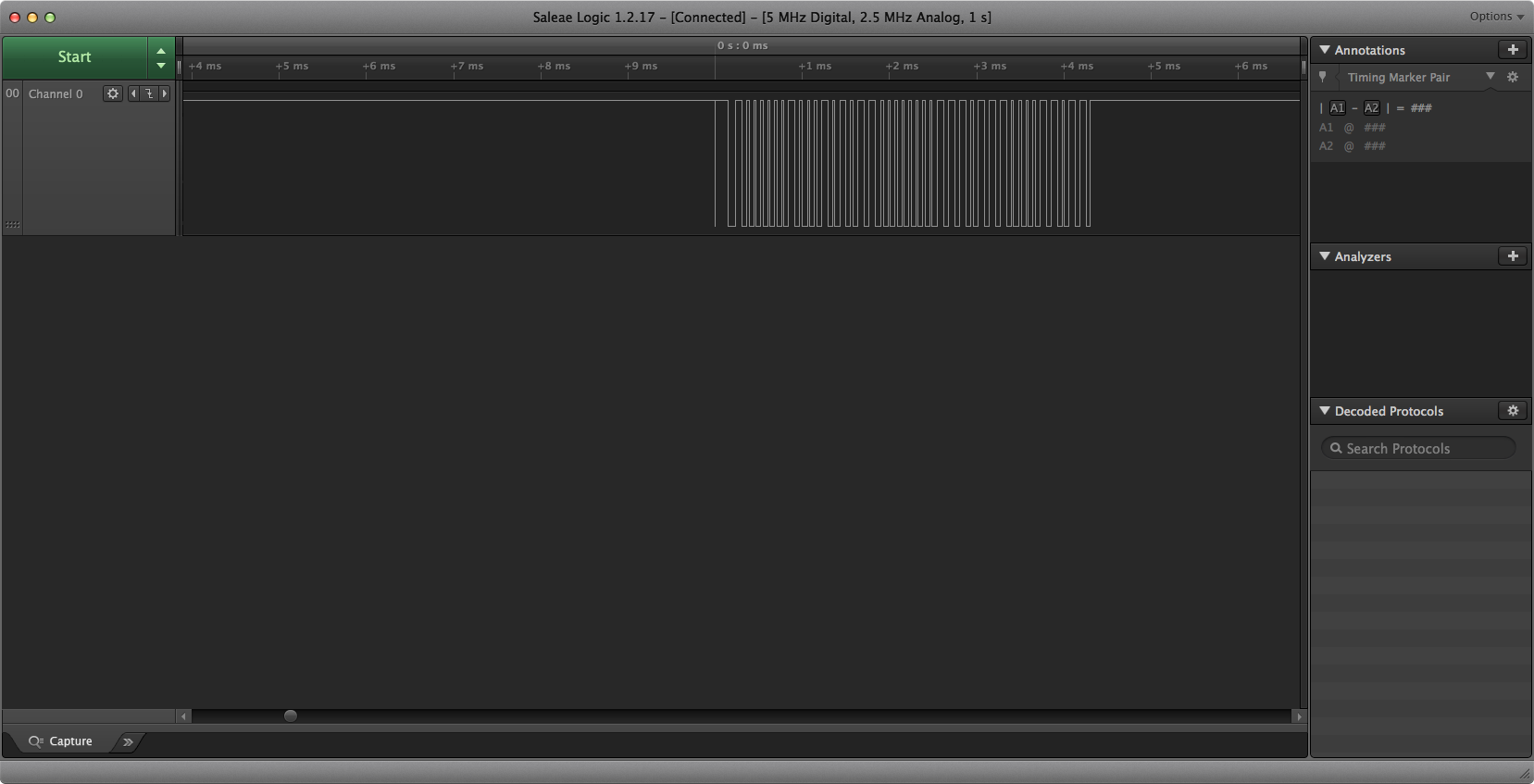
Saleae Update.
After learning to use it (short learning curve...Saleae did excellent on that front), here is the 2.x to 3.x comparison.
2.2.4
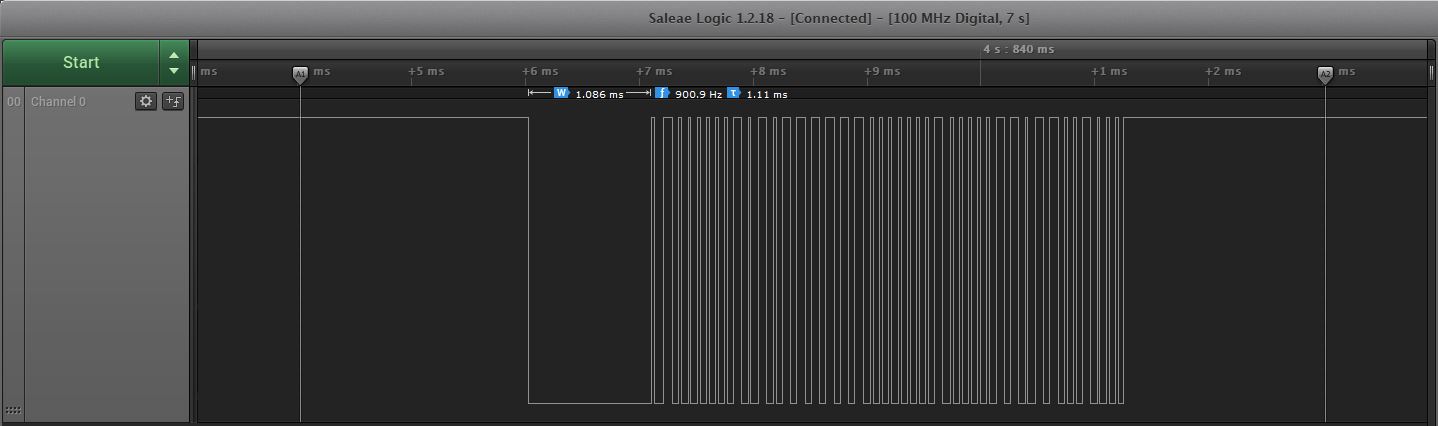
3.0.0-alpha.4
Based on the duration annotation...
i have no clue if i'm even supposed to be using the alpha builds
i guess i'm just kinda impatient
@glad rapids it's tricky, because they are used for REPL
Yup
@unreal ginkgo if nobody uses them, there is no testing...
I'm trying connect Cicruit Playground to an ESP8266
fair enough, i guess im just not sure what im exactly testing
@glad rapids the simplest approach is to just use print() in your program for output, and input() for input...
No I am looking into use the i2c bus
I thought i could just do the same but with i2c
actually, I think we don't have slave support for either i2c nor spi
getting erros on the writeto line
I thought this was a bus? that you send a message out then the other device could grab it
That is how I was going to design it with UART
the problem is that master generates the clock
and you can only have one clock at a time
So I read into the SCL
the slaves have to listen for the clock, but not generate it
Ah
so basically you need different code for the slave
Its cool that I have a Playground with tons os sensors and stuff but no way to send it to a Wifi device
I saw some Arduino project that connected the two
arduino has slave support
so you can do the slave on an aduino, and the master on cp
@glad rapids busio.UART on ESP8266 only supports TX, and only on pin GPIO2, as I think you know.
You could also make up an ad-hoc SPI-like protocol, or send SPI from the CPX slowly and do busy waiting on the ESP8266 side to read it in a bitbang way. Look for alternations of a clock line, and check a data line for state when the clock indicates to.
was trying to see if the new audio changes worked and i guess i'm not really sure what i'm missing
or if everything has been updated to involve that
i'm new to this testing bit
@unreal ginkgo not sure what you mean? Did you try to play a wav file or a raw sample?
something about audioio not being imported
i might just be missing the right files
or at least the latest ones
before using the alpha lib it said the files were outdated or something so i just imported all those
I tried a few different vales for the trigger wait.
with 100 I get a good reading then fail on the next
at 10 I get 2 good reading then fail
Press any key to enter the REPL. Use CTRL-D to reload.
Adafruit CircuitPython 3.0.0-alpha.3-100-g8f3bf5f-dirty on 2018-04-05; Adafruit Feather M0 Express with samd21g18
>>> import dht22_test
23.7 54.9
23.7 55.2
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
File "dht22_test.py", line 7, in <module>
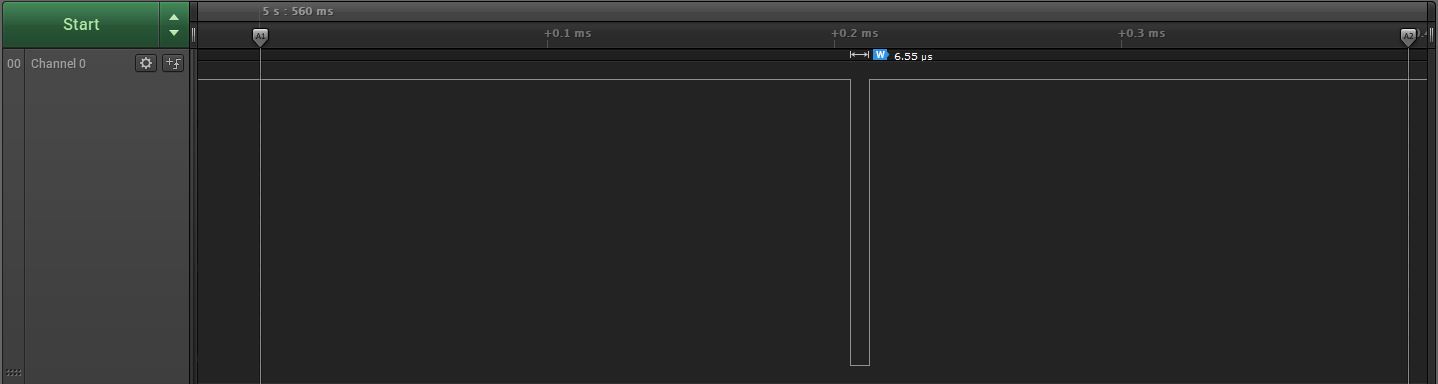
File "ad...setting it to 500 - I got a few more readings - but the SALEA only show a 4.6 microsecond pulse not 500 microsecond.
@jerryn, did the Saleae show more than the first low pulse? Wondering if your catching the 2 interrupts I was getting from construct...
with 500 -- got bad checksum but lots of pulses
this was with 500 -- I see the pushes, but am getting bad checksums most of the time...
Not sure why this code is failing
Lock the I2C bus before we try to send data
while not i2c.try_lock():
pass
try:
i2c.writeto(0x08, bytes([0x05]), stop=False)
finally:
i2c.unlock()
Fails on the writeto line
@raven canopy I need to head off for the evening, but just wanted to let you know I was seeing some sign of life from it. I consistently get the Bad checksums now - an not just the lone pulse. Can't reliable reproduce the "good" readings.
at a triger_duration of 100 - I do see a 100 microsecond pulse and a good first reading. then a bad checksum on the next.
i guess im kinda not sure how to get audio playing in general with the alpha test thing
@glad rapids `writeto() expects to see an I2C device at I2C address 0x08. If there isn't one, it will fail. What's it throwing?
@unreal ginkgo Did you see the examples in the doc? http://circuitpython.readthedocs.io/en/latest/shared-bindings/audioio/AudioOut.html
does that work in the 3.0 test stuff?
because all i get with import audioio is that it isnt found
Traceback (most recent call last):
File "code.py", line 9, in <module>
ImportError: no module named 'audioio'
which board are you trying it on?
it's not in alpha.4, it's been put in since then. You'd have to build it yourself (or I can drop a build here).
actually the builds are in aws, hold on
what's on line 69?

Wouldn't it be cool to drive a tiny OLED display, read a color sensor, or even just flash some LEDs directly from your computer? Sure you can program an Arduino or ...
Is this compatible with the Trinket M0
Never mind
got a question question about circuitpython and interrupts. Working with a rotary encoder. I'm trying to move my listening code out of the main loop... I see micropython machine and pin classes that take callbacks. Any body know if interrupt callbacks can work on an m0_express?
@agile remnant ISRs/callbacks are not available in circuitpython. as you may have read in the micropython docs, they are difficult in this type of implementation: http://docs.micropython.org/en/latest/pyboard/reference/isr_rules.html
asyncio is being developed though (no ETA): https://docs.python.org/3/library/asyncio.html
ok, yea actually it was this https://circuitpython.readthedocs.io/en/programming_guide/docs/reference/isr_rules.html document that made it sound do-able (if you're careful), but your saying it just wont work, good to know it would be futile. I'll watch asyncio with some hope there.
hmm...that page shouldn't exist for circuitpython; it is confusing (case in point). we've been cleaning up the docs to remove this kind of stuff that came over from micropython, but is either different or non-existent in circuitpython. thanks for bringing it up!
Fork left overs, understood, thanks
@indigo wedge gonna try to install latest cpy on this PCA10056!
@agile remnant there's some discussion on uasyncio, i think its best to expect it to run on the m4 chips...the m0's dont have a ton o memory
these fancy alpha(?) builds are weird and confusing
audioio has changed a bunch
its still in heavy reworking, to support i2c. can you just use 2.2? thats well known
why do you need 3.0?
er i2s not i2c
mostly the problem with playing audio and having lights do stuff at the same time
oh yeah thats buggy right now :/
we hvae an open issue on it
(which is why we're rewriting a bunch of audio stuff :D)
alright!
at least all the light stuff still works so i'll just be confused at what i can't see and hope you have good luck with fixing all of it
lol thank you, playing audio while doing neopixels at the same time is really hard because both things have strict timing :/
if you hvae dotstars you may want to try those
they're less picky
interesting
@unreal ginkgo the "latest" Read The Docs is usually the most up-to-date with everything. here is the one for AudioOut: http://circuitpython.readthedocs.io/en/latest/shared-bindings/audioio/AudioOut.html#audioio.AudioOut
alright!
oh hmm looks like maybe the 3.0 did fix it
GitHub
if you start to play a file, then do some neopixel stuff before the file is done playing, you get a hardcrash!
verified with 2.1 and 2.2
@unreal ginkgo what hardware are you using?
whatever was at the top of this list is what i was running on my playground express
neat!
@unreal ginkgo try this
import audioio
import audiobusio
import board
import array
import time
import math
FREQUENCY = 440 # 440 Hz middle 'A'
SAMPLERATE = 8000 # 8000 samples/second, recommended!
# Generate one period of sine wav.
length = SAMPLERATE // FREQUENCY
sine_wave = array.array("H", [0] * length)
for i in range(length):
sine_wave[i] = int(math.sin(math.pi * 2 * i / 18) * (2 ** 15) + 2 ** 15)
sine_wave_sample = audioio.RawSample(sine_wave, sample_rate=8000)
# enable the speaker
spkrenable = DigitalInOut(board.SPEAKER_ENABLE)
spkrenable.direction = Direction.OUTPUT
spkrenable.value = True
spkr = audioio.AudioOut(board.SPEAKER)
spkr.play(sine_wave_sample, loop=True)
time.sleep(1) # until...
spkr.stop() # we tell the board to stop
alright then .w.
and then this will beep and play a sound
import audioio
import audiobusio
import board
import array
import time
import math
# enable the speaker
spkrenable = DigitalInOut(board.SPEAKER_ENABLE)
spkrenable.direction = Direction.OUTPUT
spkrenable.value = True
FREQUENCY = 440 # 440 Hz middle 'A'
SAMPLERATE = 8000 # 8000 samples/second, recommended!
# Generate one period of sine wav.
length = SAMPLERATE // FREQUENCY
sine_wave = array.array("H", [0] * length)
for i in range(length):
sine_wave[i] = int(math.sin(math.pi * 2 * i / 18) * (2 ** 15) + 2 ** 15)
sine_wave_sample = audioio.RawSample(sine_wave, sample_rate=8000)
spkr = audioio.AudioOut(board.SPEAKER)
spkr.play(sine_wave_sample, loop=True)
time.sleep(1) # until...
spkr.stop() # we tell the board to stop
f = open("rimshot.wav", "rb")
wav = audioio.WaveFile(f)
spkr.play(wav)
while spkr.playing:
pass
print("Stopped")
you can remove the beep part once you know it all works
yes always!
lol
well it works!
huzzah!
now all i need to do is figure out how to save even more space
yeah, especially when the file being used is 817 kb
well, it works, now to figure out how to get it to play other files
you've gotten this far, you can figure it out - we believe in you 😃
thanks!
well i've figured out how to get that changed
now the only problem is how to have it play different files on different commands
and to readjust the lights
it works with the main sound so far which is good at least
and i've done it
i'll put a video in show and tell soon
i'll get the other parts working as soon as i can
awesome!
you'll get there, just make backups and take notes when things work
its just a process of learning
🎉 excellent work @unreal ginkgo!!
and makes success that much better 😃
wait
okay forgot some things i guess
gotta make sure i can do it twice in a row
theeere we go
now all that's left is figuring out what's what with the other few files and having it be able to play different files at different times
hmm. might have to switch over to the itsybitsy for debugging. 3.x has gotten too big for the trinket with DEBUG=1. 11K over now that HID and audio are back in... 😦
should probably look into updating the vagrant box's gcc too (it's still on 4.8.4).
@unreal ginkgo great! 😄
One tiny little personal tweak and some physical stuff and I’ll be completely done
there we have it!
100% done!
until next project :}
hi, can anyone help me with the 3d printed usb foot switch project?
https://learn.adafruit.com/USB-foot-switch-circuit-python/software currently the code will not hold the button down. it will just quickly press it.

3D printed foot switch USB controller
i have no idea what part of the code needs to be edited to change the function
@sommersoft I think the reason it locks up for tick_duration > 1000 is becasue it is usint tick_delay with interrupts disabled - this will wait forever since tick_ms won't increment with interrupts disabled.
https://github.com/adafruit/circuitpython/blob/master/ports/atmel-samd/tick.c#L64
This function does not appear to be generating consistent delays.
https://github.com/adafruit/circuitpython/blob/master/ports/atmel-samd/tick.c#L59
@devout yew I believe you're looking to comment out the kbd.relase_all() line
line 41
You can add a comment by #kbd.relase_all() the # infront of the line. That would make the key act as if it's being held down.
Still trying to understand tick_delay, but this is all new to 3.0 and it look like the problem is caused here. If the requested delay is less than the time until the next tick, I think the current logic generates a short pulse for the Pulseio.resume trigger_duration.
@jerryneedell that is exactly where I was heading too. I was studying it yesterday. I'm going to start trying to read some values during debug...
@sommersoft I tried simply replacing the call to tick_delay with delay_us (as in 2.2.4) and setting the dely back to 1000. It now runs but I get quite a few checksum errors about and bad readings. However, I do get many successful readings. Not a real fix, but I think it points to tick_delay as the main culprit.
Adafruit CircuitPython 3.0.0-alpha.4-dirty on 2018-04-15; Adafruit Feather M0 Express with samd21g18
>>>
>>>
>>> import dht22_test
20.6 55.0
20.6 54.9
20.6 54.9
RunTime Error Checksum did not validate. Try again.
225.4 54.8
RunTime Error Checksum did not validate. Try again.
225.4 54.8
RunTime Error Checksum did not validate. Try again.
225.4 54.8
20.6 54.7
20.6 54.7
20.6 54.7
RunTime Error Checksum did not validate. Try again.
6553.5 6553.5
20.6 54.6
20.6 54...@solar whale DHT22: 6553.5 6553.5, did you timewarp to the Sun real quick? ☀ 😎 😄
@raven canopy Ther may be 2 issues - some bad readings - and the tick_delay. I use tick delay but ignore the errors, then it does runs sometimes - some with good results, some with bad.
i getting ready to debug. building trinket without hid/audio right now (won't fit with them and DEBUG=1). also just put the headers on the itsy_express.
There may be 2 issues going on. If I go back to using tick_delay with the code ablove, it eventaully recovers from the incomplete buffer errors then gives some good readings and some bad readings.
I can also try using my metr0_m4 revb or metro_m0 - they have headers.
@solar whale i was just about to ask if you were seeing the same on your m4_dev board...
have not tried it yet - I'll do that now
darn... can't build without HID unless i revert or hammer it out of supervisor. itsy it is!
similar results on M4 - but never get what looks like a correct reading
and the hits just keep on coming. itsy boots fine with 3.x-alpha.4. but won't with my master DEBUG=1 build. 🤔
hmm. must be one of the debug flags. we'll see what we get without it...
I'm struggling with J-link on M4 -- been awhile since I tried
hehe. i was in the same place earlier this week with the esp. 😄
well, now i have to figure out how to narrow down watching tick_delay. the status rgb uses it and it's running every cycle...
hehe. easier then i thought. enter REPL...solid white, no tick_delay. 😄
ok i removed my secondary account so now there's just one of me
guess we'll have to cope with the reality that there can't be two of you. 😄
@sommersoft#0222 I think there are 2 problems with tick_delay -- as written ```
us_between_ticks - us
will be negative since us is 1000 in our case and us_between_tics is always < 1000 but I think since us_between_ticks and us ar defines as unsigned ints, this diff is always assignee 0xffffffff because the diff is negative - so tick_delay returns immediately. Setting us to < 1000 will sometimes work as seen depending if us_between_ticks is > us.
If we "fix this" then it will ...example of mis handling of diff between unsigned ints.
jerryneedell@Ubuntu-Macmini:~/projects/metro_m4_express$ ./test
64 a 5a ffffffa6
jerryneedell@Ubuntu-Macmini:~/projects/metro_m4_express$ cat test.c
#include <stdint.h>
#include <stdio.h>
void main()
{
uint32_t x,y;
x=100;
y=10;
printf("%x %x %x %x\n",x,y,x-y,y-x);
}
@raven canopy is it correct taht SysTick->VAL is only reset if interrupts are enabled?
i'd have to dig into it further. i'm still checking vals... my imminent GH post is going on the assumption that it does need interrupts though... @slender iron, any idea if that assumption is correct?
@jerryneedell it seems that this is similar to the 2.x wait_until function, in that it too would freeze with interrupts off. I finally was able to step through tick_delay with debug (got atmel studio to force it with debug set). Here is what I saw:
tick_ms: 199340
ticks_per_us: 48 # (obviously, but nice to verify)
us_between_ticks: 178
start_ms: <optimized out> unfortunately; even though it isn't used in the final calc?
which make the final eval = `while (SysTick->...
right - I see the same thing, but as an unsigned int, -47,822 is alway greater than SysTick->Val so it will return immediately thus the short pulse. Id er set trigger_duration to say 500 then sometime we get lucky and we get a normal start pulse. Sometimes not depending on where the call comes with respire tot the 1ms tick cycle.
hehe. edited that post. need to recalc using unsigned ints...
-47822 == 4294919474 as un unsigned int
yep. just got that myself, after verifying with an online calc.
the arithemtic is easy to fix, but tick_delay will still hang without interrupts.
I think this is a problem for all pulseio usage of the trigger_duration. For the DHT we might be able to workaround it by disableing the trigger pulse generated by pulseio and generating one " manually" using time.sleep. The actual pulse length is is not critical.
@raven canopy @solar whale the systick value will continue to increase but the ticks_ms depends on interrupts
since its update in the SysTick_Handler
but does sysTick-> VAL get reset when it hits 0 if interrupts are disabled?
SysTick handler is an ISR, no?
so it won't run
SysTick->VAL is set to board dependent value set to be 1 ms - then it counts down to 0 and triggers the handlers, correct? but with interrupt disabled, I think it will just sit at 0.
I'd expect it to reset but a second interrupt will get combined with the first
ah - so the HW resets it even if the ISR code does not run.. might be able to work with that
I think using tick_duration > 1000 is a bigger problem since it needs tick_ms
I think so
yeah, i imagine this is where it hangs: tick_delay L#64: while (ticks_ms == start_ms) {}
right
the m0+ tech reference doesn't explain SysTick very well, but it is tied to NVIC. and atomic_enter_critical does turn off global interrupts. Still hunting SysTick->VAL down...
How should the other ports that use the time module deal with this rtc module:
- They should also use the rtc module
- Add a weak rtc_get_time_source_time() that raises NotImplementedError to keep the time module standalone
- Add a MICROPY_RTC define that the port can set if it wants/has rtc
grrr - I hate it when I build for the wrong board then re-upload the wrong old version - more than once .....
this is where bash history can be too helpful...
haha.
I now save .bash_history incrementally by date (still doing it manually though; not a cron job).
I do a lot of redundant work in bash so sometimes a 'good' command line disappears off the end of the backlog -- trying to prevent that so I don't have to re-research a 'good' command line syntax effort twice.
its easy for me. my CLI uses are pretty specialized, so i can just use the rolling history and it usually ends up quicker.
my problem was that I had been building for feather_m0_express but I was loading to metro_m4 when I meant to build for m4 --- too many up arrows
ok...adulting time. later taters.
I need a break, too!
@slender iron Is the whole use of the 1 ms tick counter and interrupt new to 3.0?
OK - finally made some progress - I changed tick_delay to:
void tick_delay(uint32_t us) {
uint32_t ticks_per_us = common_hal_mcu_processor_get_frequency() / 1000 / 1000;
uint32_t us_between_ticks = SysTick->VAL / ticks_per_us;
uint64_t start_ms = ticks_ms;
while (us > 1000) {
while (ticks_ms == start_ms) {}
us -= us_between_ticks;
start_ms = ticks_ms;
us_between_ticks = 1000;
}
if(us < us_between_ticks){
while ...@vague monolith thanks, now i gotta figure out why the tinket m0 wont let me write to it any more
@vague monolith sorry, but the button never releases now 😦
This change to tick_delay still has its drawbacks - It does occasionally still "hang" and I think that is an edge case when the RESET of the SysTick->VAL is not getting caught properly probably due to testing against 999. I need find a cleaner way to detect the RESET.
There is clearly a problem with tick_delay as written. @tannewt - should I create a separate issue for tick_delay?
this may be hard to read, but it shows the pulses and decoded values for some dht22 reads. You can see that some of the reads have a spurious pulse of lengh 80 at the start and this trows off the whole train.
Others have some clearly bad pulse lengths (>1000)
Adafruit CircuitPython 3.0.0-alpha.4-dirty on 2018-04-15; Adafruit Feather M0 Express with samd21g18
>>>
>>> import dht22_test
array('H', [53, 26, 54, 26, 54, 26, 54, 26, 53, 27, 53, 26, 54, 74, 54, 25, 66, 26, 54, 26, 54,...ah - fixed the metro_m4 and most of the errors on the feather_m0:
in the dht driver:
def _get_pulses(self):
""" _get_pulses implements the communication protcol for
DHT11 and DHT22 type devices. It sends a start signal
of a specific length and listens and measures the
return signal lengths.
return pulses (array.array uint16) contains alternating high and low
transition times starting with a low transition time. Normally
...@solar whale The idea is similar to 2.x but I switched it from TC5 to the SysTick timer
@slender iron thanks - I was getting lost trying to compare. I think I am making progress. I hope you can follow my posts to the github issue.
I'll take a look later tonight 😃
no rush - I'm just trying to document what I've tried. Really 2 issues - one related to tick_delay, one in the dht driver.
kk
example from metro_m4_express_revb - with modified tick_delay and modified dht driver.
Still some glitches and I had some cases where I think the "edge condition" noted above cause some problems. Overall - it is "working" under 3.0 - not perfect, but much better.
If you think this is headed in the right direction I'll create a PR tomorrow,
I think I have a much cleaner way to detect the reset of SysTick->VAL. I’ll try it tomorrow. I’ll just look for it to increase in value. This will signify a reset. It won’t be a big change so let me know if you have other suggestions.
holy cow @solar whale, you've been on a tear! 😄 jacking in to catch up...
@solar whale, this is the best "outline" i can find of SysTick: http://microchipdeveloper.com/32arm:samd21-systick. it's basically a prettier version of the ARM v6M manual. After reading a few times, for anything over the full SysTick rotation, we might be able to use the COUNTFLAG register; keeps things chip agnostic (may already be used somewhere, just haven't seen it). Also, definitely need to see what else tick_delay affects; DHTx seems like it would be a narrow view. I vote for a new issue, but leave the final call up to tannewt or Dan.
@raven canopy thanks for that link. That agrees with what I came to understand today. Nice to see it in writing! I think we can even handle the >1000 trigger_duration with this when interrupts are disabled. We’ll see. Sometime these ideas don’t look so great the next day 😉
after like 5 iterations failing logic...brain is done. Bosch season 4 is calling. 😄 chat at ya'll tomorrow...
@tidal kiln when you have a chance could you move this to the rpi forum? https://forums.adafruit.com/viewtopic.php?f=60&t=134126
Ok, thanks! Please open a new PR if you get it going later. Thanks for trying!
Thanks for the work on this! I'd suggest A variant of 2. that stubs it out in each port. That way its easy to see where to implement it. (Hopefully we'll have it in all that support it eventually.)
Also, you should be able to update this with the newer submodule for asf4 which includes the calendar changes.
Thanks!
@sommersoft and @jerryneedell you are amazing! Thank you for sorting this out!
I don't think we need another issue. This has so much good background it'd be worse to split the discussion up. Thanks again!
OK - I think this fixes tick_delay and allow it to work even for us > 1000.
void tick_delay(uint32_t us) {
uint32_t ticks_per_us = common_hal_mcu_processor_get_frequency() / 1000 / 1000;
uint32_t us_between_ticks = SysTick->VAL / ticks_per_us;
uint32_t start_tick;
while (us > 1000) {
start_tick=SysTick->VAL; // wait for SysTick->VAL to RESET
while (SysTick->VAL < start_tick) {}
us -= us_between_ticks;
us_between_ticks = 1000;
...works for dht11 as well now that tick_delay can handle the 1800 microsecond trigger_duration.
Version 2
Changes:
- Make RTC.datetime an attribute
- Add RTC.calibration attribute
- Use MP_STATE_VM(rtc_time_source)
- Add rtc_reset()
- Update to latest asf4 commit to get hal_calendar
- Support samd51, only compile tested. I don't know if have got the clock right.
- Add a weak rtc_get_time_source_time() to avoid breaking ports. I just wanted this version out the door (since you already had pulled my asf4 change) so I didn't contemplate your suggestion about a variation of op...
with these changes, tick_delay works with pulseio.PulseIn to handle trigger_duration
This was necessary for DHT22/11 support
It also can handle delays of >1000 microseconds even with interrupts disabled.
No longer depends on ticks_ms
also cast argument to common_hal_mcu_delay_us in PulseIn.c
@raven canopy The use of COUNTFLAG for the tick_delay looks interesting. One concern is that reading it clears it ! Not a problem now since it does not appear to be used anywhere else, but this is a bit scary.
guys, how can I use array in micropython/circuitpython ? It has only two methods, append and extend, it is not enough I think))
@astral spoke what are you trying / wanting to do? and can you clarify what you mean by "array"?
import array
I try to reduce heap fragmentation...
And no luck last few days with it
ah. good info. hmm. others here will be able to answer that better than me.
Main problem, if I write + 10 lines of code and I got memory allocation error (about 17000 free memory). Current code about 350 lines
I think problem in heap fragmentation
In code nothing special, collect button press count and send it via wifi to mqtt server
@solar whale yeah, as I went through some iterations last night, I kept thinking about secondary effects. COUNTFLAG shouldn't be much of an issue. The problem is how we're not starting at zero. us_ticks_between is only until the next ms, not the next RELOAD. I think that same problem is in effect when setting us_between_ticks = 1000. Still munching on the thoughts I have though... (I'll move this post into the GH issue as well)
Someone have problems like me or micropython ready for very simple code only? blink led for example.
@raven canopy I don't see the problem - the RELOAD happens every ms. doesn't it?
It works with 1000 -- and with 18000
@astral spoke what board are you using?
@solar whale esp8266 generic dev board
@astral spoke can you post an example of the code that is giving you trouble?
@solar whale all 350 lines of code giving trouble and I don't know why
is it for micropython or Circuitpython?
micropython
well, we don't know either without seeing it
@raven canopy what I hoped to be doing was to break the delay into 2 parts if necessary - first one goes down to the RELOAD at the next ms then it finishes after the RELOAD. If > 1000 then it adds steps of 1000.
This is my N try of code optimization, and still no luck.
bytes instead strings in dictionary keys - another try)))
After desktop version of python, micropython looks like hell...
I have check for it
line 219
error happens in random time if I try to add few simple functions (extra 10-20 lines of code)
looks like 350 lines of code it's micropython limit)))
when I have about 17000 free memory, it's weird
wait, so you get that error when you try to import it?
have you tried to compile it to an .mpy file?
I actually had the same problem with micropython
No, for example: I added 20 lines of code, upload it to esp, all works fine and in random time I got memory allocation error
can you also pastebin the complete exception?
How can .mpy help?
well, since .mpy is already parsed, the micropython doesn't need to use memory to parse it and hold the parsed bytecode in ram
You tried it? It's helps?
somewhat
I think rewrite code on C is better solution after my bad experience with micropython
@stuck elbow are you tried .mpy?
It is helps with your problem?
I'm not sure about profit if I use mpy
Micropython on microcontoroller must be simplier than C (in theory), but practice says C == micropython. It is sad
shrugs
works for me
use whatever you like
at least you get an exception when you run out of the memory in Python, not a crash like in C
I like python, but micropython != python
@solar whale sorry, got caught up at work. I meant to say tick instead of ms. Like I said though, I'm still munching on my thoughts. Probably making it more complex than it is; i tend to do that and walk backwards. 😄
@astral spoke I couldn't care less
@raven canopy np - I know how that work stuff sure gets in the way...
@astral spoke this is a circuitpython channel, not a micropython channel. but they both make a lot of compromises to get python running on microcontrollers. there will always be trade offs in doing this.
@raven canopy still puzzled by your concern. As I understand it, there is a RELOAD at each "tick" (it is configured to occur every ms)
@astral spoke I would try with the mpy and see if that helps, and if it doesn't, I would think about how to avoid creating a million objects in your program, and instead re-use the same few objects
@astral spoke or just switch to a raspberry pi — it has more memory than you could ever use up
where is million objects? 20 != 1000000
@tidal kiln circuitpython have same problems
@astral spoke circuitpython has much less fragmentation in 3.0
@astral spoke you are creating a new list every time your old list gets too big
instead of truncating the old list
@stuck elbow this line cleans existing global variable DEVICE_DATA
it doesn't clean it, it just creates a new list
consider doing DEVICE_DATA[:] = [] instead
Can feather m0 be used in spi slave ?
@rotund basin in principle yes, but circuitpython doesn't have the support for it
@rotund basin I think that arduino does, though
@stuck elbow you are correct
<@&370994983664091136> @raven canopy Metro M4 will be in stock soon. Please make a free order for one and email me the order number. Email me (scott@adafruit.com) if you need instructions. https://www.adafruit.com/product/3382
Are you ready? Really ready? Cause here comes the fastest, most powerful Metro ever. The Adafruit Metro M4 featuring the Microchip ATSAMD51. This Metro is like a bullet train, with it's ...
@stuck elbow too
Thank you!
Nice chip, any plans to be able to get to the Ethernet on the chip?
in a future product?
Was just looking at the spec, does it also have the PHY on the chip too?
n/m that is 53 and 54, so I guess any plans for a board with that?
you need an RTOS + PHY
it isnt...as useful as people think
honestly, id recommend just using a wiznet 5500
too slow
unless you need massive thruput. the effort to get a tcpip stack on there, its months of work
use a raspi then 😃 on-chip ethernet never seems to be as good as people like
either the stack isnt good enough, or the overhead eats at your performance
Tell me about id, a few years back I did a board with older version of that line
but PHY is one chip 😃
PHY is still $1.50
and a stack is a massive undertaking to get right
teensy has been promising ethernet for maybe a year now?
thing is you dont want ethernet, you want bsd sockets
thats a different thing 😃
I forgot which one I looked at but it was an alt open source TCP stack, with good IPV6 support too
maybe in some far future! it would be cool...but for now we recommend a w5500 or go to a beaglebone/raspi
just looking for an alt lower power solution for smaller devices
ethernet is not low power?
@solar whale your line of thinking is correct. I was visualization in the wrong direction for us in relation to RELOAD. 😵
rpi3b+ is poe
@stuck elbow interesting DEVICE_DATA[:] = [] Can I buy beer for you? 😃
didn't get in on the first 1000, waiting for May to play with one
https://www.adafruit.com/product/3238 these poe splitters works with anything 😃

Power over Ethernet (PoE) splitters can make your project wiring a breeze - and best of all they work to connect any 802.3af-capable router to any Ethernet device, even if it doesn't ...
missed the order by like 5 min
? they're in stock https://www.adafruit.com/product/3775

The Raspberry Pi 3 Model B is the most popular Raspberry Pi computer made, and the Pi Foundation knows you can always make a good thing better! And what could make the Pi 3 better? How about ...
you still have some, got the announcement e-mail blast from Newark as soon as they had them, went to the site, there were 5 left, and by the time I got the order done, they were down to 0
I figured if they were out, you would be too
@astral spoke I take it helped?
@stuck elbow Not sure, but it was helpful advice
@stuck elbow also helpful. Do you drink beer? 😃
@astral spoke we are all here to help, and it's enough for us to know we helped, thanks
@stuck elbow thank you
<@&356864093652516868> and everyone else. CircuitPython Weekly Meeting in one hour here on Discord!
WHat did I do wrong? ```Counting objects: 3, done.
Delta compression using up to 8 threads.
Compressing objects: 100% (3/3), done.
Writing objects: 100% (3/3), 358 bytes | 0 bytes/s, done.
Total 3 (delta 2), reused 0 (delta 0)
remote: Resolving deltas: 100% (2/2), completed with 2 local objects.
To https://github.com/jerryneedell/Adafruit_CircuitPython_DHT.git
! [remote rejected] jerryn_dht -> jerryn_dht (pre-receive hook declined)
error: failed to push some refs to 'https://github.com/jerryneedell/Adafruit_CircuitPython_DHT.git'
nevermind - recloned and all ok.
@slender iron fyi we're doing a light rev on the metro m0 express to come with thm headers and GD25Q flash
i also bumped to 2.2.4
👍
mostly just more durable, i like the thm headers 😃
totally
@slender iron m4's are getting prepped
if I'm reading the datasheet right we should be able to DMA to PORT
reallY??
that is within philb's interestes
because we were using timer/waveform to do neopixel dma
the high speed bus system chart shows all four APB bridges serviceable by DMA
and the memory map say PORT is on bridge B
HmmMmMm
oooh snazzy new pix now at v

Are you ready? Really ready? Cause here comes the fastest, most powerful Metro ever. The Adafruit Metro M4 featuring the Microchip ATSAMD51. This Metro is like a bullet train, with it's ...
pretty
12 minutes
ok i will go FAST
i do
i want to put them in, notify everyone and then remove again so we can avoid non-beta people ordering
notify the beta folks?
yeah in 12 min
kk 😃
i figure they'll be here in meeting? mostly?
mostly yeah
jepler is on vacation for a couple weeks
(not actually a beta person but helpful)
we'll keep some stashed no matter what
👍
we fabbed 150
cool cool, I think they'll go fast
awesome!
👋
@shrewd bough we're listening to you
ooh m4 thingys
I don't even see them in the voice channel on my app... But I do hear it.
https://www.adafruit.com/product/3382 is now in stock
Are you ready? Really ready? Cause here comes the fastest, most powerful Metro ever. The Adafruit Metro M4 featuring the Microchip ATSAMD51. This Metro is like a bullet train, with it's ...
we have a limited number, please pick up 2 only if you are pretty sure you're going to destroy one 😄
nothing was added re- disabling interrupts - that is done in pulseio -- should it not disable them?
more trying to figure out how they're going to be used
don't have the time right now
@quick remnant this run is for the beta testers, we'll have more later 😃
we wanted to replace any old rev B boards people had
doing the order right now
don't worry not planning to get one, don't have the time right now
It's like a fluffy pillow...
Hey guys, noobie needing advice here
I've installed circuit python on my circuit playground express, but I'd like to go back, like a factory reset, so I can use it with the MakeCode again
yayyyyy M4
@copper shuttle just double click to get back to the CIRCUITPLAYBOOT drive
and drag over the UF2, it will 'reset' back to MAKECODE
dont forget to make a backup of your python code, it should not be deleted but its always best to save
yayyayaya
Yay!
Double click where exactly? xd
And which UF2 should I drag over?
I tried putting a .uf2 example I made on the site, restarted it, but nothing happened
Text only today. Group hug including Ladyada for the release of the Metro M4!
thanks cg
Not up to speed enough to give any sorry
just trying to get a feel for the dev process around CP
@jerryn for collabing on DHT/PulseIn/tick_delay. @Dan Halbert for speedy fixes on HID, and @tannewt for getting audioio out. Group hug for all that I've forgotten. Last minute: @adafruit and m4-testers for...M4
@meager fog any hug reports?
yah! thanks to dean for helping get these m4's wrapped up, philb for the silkscreen
Yes! PT for the great Blinka graphics!
scott for audio! it works better now it seems 😃 and dan for multimedia keys which i have bene wanting for a while 😄
kattni has rocked out the plotter demos, and pt video'd them with some cool greenscreening
so its a team effor 😃
if anyone else is planning on some M4 fun, please pick up a Metro M4 ASAP, we have some left of the 25 we put in a half hour ago
but they're going fast
Ooops was surprised to be asked by name; gave a status report not hug report - sorry guys. Have been working through https://www.gov.uk/government/publications/gcse-computer-science to see how educators can be guided to fulfil these criteria through Micro/Circuit-Python exercises built on rock-bottom ESP8266 kits and widgets from Aliexpress - selected a DOIT NodeMCU-M for now.

Subject content, aims and learning objectives for GCSE in computer science for teaching from 2016.
I suspect there might be something uncanny happening with i2c reads being cached — so the read succeeds — but I have no idea how to check that
what about clock stretching and bitbangio?
Three status items:
- Finished CPy holiday light animations. During that process, noticed that time.monotonic and time.sleep accuracy isn’t what I originally thought (and follows what the team already knows), but it's okay for the “6-hrs on” timer. As a result, developing a suite of benchmark tests to compare performance on the various CPy processor foundations, starting with time (including PWM) and then including other features such as calculation throughput, etc. Wondering if I'm reinventing something? Are there any existing benchmark test suites out there?
- Working with the ILIO9341 display (2.4” TFT FeatherWing) as part of the conversion of the corrosion detector from Arduino to CPy using Tony D’s library. Line and pixel graphics is functional. Next step is to incorporate his MicroPython bitmap font library.
- Side note: my band’s CD release party extended into the weekend but is over now. Whew. Not as resilient as I once was.
Fun time for all.
@errant grail take a look at https://github.com/ShrimpingIt/bitfont to see if there's any resources you can bring across
GitHub
bitfont - A renderer-agnostic port of u8g2 pixel fonts to python3, suitable for low-resource environments like micropython.
@hollow ingot Thanks!
ok removing the metro m4 from stock for now
we'll have more in soon 😃
but we dont want to confuse people. we have some stashed, if you absolulely need one from the first run please contact @slender iron

A handheld running CircuitPython and cheap enough for a badge.
@errant grail Affero is my default setting, but happy to relicense within limitations imposed given I'm 'downstream' from u8g2, though strictly no code survives since all information was transformed from BDF to python so probably no actual legal limits. Just let me know what license would suit.
@jerryn has DHT & tick_delay PRs in, so that is just about done. Will continue to push against ESP8266 GPIO16 (Magic 8 Ball: outlook not good). Might work on PulseIn for ESP/nRF.
Lol
@meager fog any status updates?
just metro m4 release, itsy m4 in progress
metro m0 going thru a light revision to include THM headers
@hollow ingot I'll continue with Tony D's library for the time being (I'm a beginner -- it's a learning process for me), but will check out yours when I get that figured out.
Hehe. Here are my prepped notes: with tick_delay imminently traversing milliseconds, do we want to handle updating tick_ms if interrupts are disabled? Obviously depends on nature/level of interrupts being disabled; i.e. will NVICPending or OVR update after re-enable.
Slightly.. 😄
However, if you need 1500us, how do you do that?
can't you re-enable the interrupt in between the pixels?
@slender iron wIll do. I’m looking forward to getting back to CP. Also, looking at extending the platform to a lisp.
SAMD51 has GetActive for NVIC right? SAMD21 doesn't, so tricky to know if interrupts are enabled...
stays silent
:+1:
do we have problems with esp8266 and the bno055? I missed that
clock stretching is working on the esp8266
I wonder if we could somehow disconnect the clock line so that we could capture on the trace which side is pulling it?
I found my bno055 yesterday, so I can give it a go too
270 does not work for I2C. 😄
you can limit the speed with i2c.config I think
but it should work in the fast mode
4.7kΩ is required by standard for the 400kHz mode, iirc
@slender iron remember to get the uGames :)
K
Thanks!
thank you!
Thanks! Later.
the cake is a lie ;-)
@tidal kiln may not be relevant but this was the thread I recalled https://forums.adafruit.com/viewtopic.php?f=19&t=128919&hilit=BNO055+pullup
thanks @solar whale will take a look
I'll look at modifying PulseIn.resume to work better with this an only disable interrupts for < 1ms
Later folks! Appreciate the discussion and the help.
@slender iron Argh. I was offline and missed the "in stock" window.
@umbral dagger are you on now?
@umbral dagger grab em now 😃
@meager fog Grabbed.
Thanks all. My week had a lot of stupid stuff around dropcatching domains (vgkits.com etc.) configuring resources and securing Twitter, Facebook, Instagram, Github etc. for the simple name vgkits for disseminating info.
@hollow ingot Thanks for making the meeting!
For discussion, a very drafty example of guidance for educators to source from wild-west Aliexpress for a particular project lives at https://vgkits.org/blog/project0/ Posts like this will need images/video and lots of suggestions from people to make them less horrid (hence all the social media OAuth) as well as beating wordpress with a big graphic design stick! There's a bunch of unpublished supporting material which I'm trying to prioritise and clean up until people can usefully land at https://vgkits.org Basic idea is offering bagged and prepped kits based on openly-disclosed Aliexpress sourcing. If successful, would feed enough revenue through to prepare more and more detailed guides+examples, with confident adopters not sourcing from us at all. Focus is supporting educators who are willing to put up with the complexity of self-sourcing/flying wires/blue smoke as a route to Python3 physical computing in UK schools. Certainly not ready for newsletter, yet, but hopefully soon. Some rationale/project orientation at https://vgkits.org/blog/2018/04/10/beginning/ Very much forward to getting back to software. Think adafruit-blinka could help people have a soft-landing given the work on circuitpython and esp. drivers.
The Rainbow kit is our first experiment with defining a Python-programmable kit for the classroom. Educators with the time and confidence should be able to sour
Teaching with Python Gadgets in the Classroom
VGKits.org is a resource for educators introducing physical computing with Python, in computing, D&T and science classrooms. Our guide helps educators choose the right components, source them cost-effectively and prepare them for compelling activ...
@umbral dagger ok locked em back up, thanks!
M4 will easily do this key assigner I want to recreate
@ruby lake yay its super fast. one sad 😦 is the G19 QFN48 doesnt have i2s, like at all
the J19 on t he metro does, and we brought out mck
but the feather & itsy wont
I am sad and happy then. 😉
dunno why they just like, ditched i2s on the qfn48. the pins are 'there' in the pinmux
J19 superfeather!
Have to go - have a good afternoon/evening and all other timezones
I have ever only seen i2s used for bit-banging
i am porting (up through sending a packet0 Adafruit's RFM69 circuit python library to the Raspberry Pi: https://github.com/BitKnitting/RFM69_pi/blob/master/RFM69_pi.py ...Challenge: My call to send() times out. Debug: in the logic directory: https://github.com/BitKnitting/RFM69_pi, I have placed logic analyzer runs for Feather and Pi. There are three patterns: 1) init 2) temperature 3) send. init and temperature show "pretty much" the same SPI . PROBLEM: pi's send() never gets to 0x28 (i.e.: send complete)...rather there's 0x27 (w/ timeout info?). So I believe the send times out. But i am unclear what causes it because the api/spi code "seems identical to me." Any thoughts/advice greatly appreciated. thank you.
Note: I used meld to compare the pi vs. feather csv outputs of the logic analyzer sniffs...
oops: NOTE - I am using Adafruit's RFM69 BoB wired to the Raspberry pi.
So I think the problem is PLL Lock....hmmm....

@meager fog That's so strange about I2S on the G; Did you test it at all to see if it's just a datasheet issue? I guess I'll have to update my symbols in eagle :<
@pastel panther The cmsis includes don't have the memory mappings for I2S with the G and the datasheet says its not included in the G variant
you could try it, but you'd have to fake out the software library to see if it does anything. We don't know whether it's fused off, bad documentation, or just not guaranteed to work (like maybe they don't test for it in that variant).
lame-o
if you have a receptive MicroChip sales engineer to ask, that might or might not be informative
seems like a stretch that it would be cmsis and the datasheet both being wrong
yeh, and the pinmux section has a big caveat that says in effect "just because the pins are listed here doesn't mean it works: check the capabilities section"
especially when we already know that the pinmux matrix isn't a guarantee that a pin has a function
right
I already ran into that with some timers I think
I made a trivial change to common_hal_pulsein_resume to leave interrupts enabled if trigger_duration >=1000. DHT22 and DHT11 still seem to work. DHT22 trigger is 1000 DHT11 is 18000.
void common_hal_pulseio_pulsein_resume(pulseio_pulsein_obj_t* self,
uint16_t trigger_duration) {
// Make sure we're paused.
common_hal_pulseio_pulsein_pause(self);
// Send the trigger pulse.
if (trigger_duration > 0) {
gpio_set_pin_pull_mode(self->pin, GPIO_PULL_...That looks good to me! It would be good to make sure in the timing code that interrupts are enabled. (And return early if they are.)
@tulip sleet can you review https://github.com/adafruit/circuitpython/pull/764 when you have a chance?

GitHub
Its 256b on M0 and 8k on M4 to match flash erase sizes.
Fixes #758
@slender iron - sorry, I missed that somehow. One Q: The old impl set some fuse bits to protect the "EEPROM emulation area". I think you didn't do that this time , but if so it means a full flash erase will delete the data (which is fine with me). Is that right?
@tulip sleet those bits don't actually protect it all. I just used it as a smoother upgrade path at the time. With the SAMD51 if we use those bits it'll require reading and writing in a different way
sounds good! tnx!
np, thank you!
@solar whale: have a nice zone. ;)
Thank you so much! I made a couple small tweaks and am merging. Feel free to follow up with any changes you'd still like to make.
I cloned ladyada's repo and tested this by hand and it works.
hey @tulip sleet is AnalogOut supposed to work on the m4?
it's supposed to
i added and tested it, a while ago
are you asking about CircuitPython, or an issue you're having doing it in C?
in CP
this should result in 3.3v on A0, right?:
import board
dac = analogio.AnalogOut(board.A0)
dac.value = 65535
it should, and i tested it on the rev B board a month or to ago
let me do another sanity check
i will wire it up here
yea, just double checked with my mm
both my logic and mm say no dice
tried both from repl and writing a code.py
it works for me, but I'm on a build that doesn't have Scott's new audio stuff. Let me try that one.
that had some analog changes
@pastel panther works for me on the latest master too, on a rev F board
hmm
I only have the rev b. Let me check again
check checked again and compared against D12 and the 3v3 pin to make sure I was properly grounded
still no dice
just built about an hour ago: Adafruit CircuitPython 3.0.0-alpha.4-21-g7f7cbe8 on 2018-04-16; Metro M4 Express Rev B (Black) with samd51j19
@pastel panther I will try a rev b. I am building against the same commit
ok
did you git submodule update?
yup, didn't build until I did
ok, duplicated your problem on the rev b board. the pin assignments for A0 and A1 haven't changed, though, so the problem is not as obvious as one might suspect.
I can create an issue
For what it's worth I found this issue testing the adc with current master on my custom G19 m4 board
so I don't think it's just the rev b
I rechecked on the latest boards and it works. we are dropping support for the rev b boards. But hmm, if it doesn't work on your board...
the implication is that it won't work on the feather m4 and itsy bitsy m4
(maybe)
@slender iron might have an intuition about what changed. The new audio code can output to a DAC.
it's hard to say for sure without knowing more specifics, though the fact that you say the pinout is the same for the newest m4 and the rev b suggests it's probably not a hardware issue
go ahead and open an issue, since as you say it may fail on the other m4 boards. Thanks for this.
will do
It would appear that something is awry with AnalogOut on current master for the Metro M4 rev. B as well as my SAMD51G19 based board.
import analogio
import digitalio
import board
d12 = digitalio.DigitalInOut(board.D12)
d12.direction = digitalio.Direction.OUTPUT
d12.value = True
dac = analogio.AnalogOut(board.A0)
dac.value = 65535
The above should result in 3.3v on D12 and A0 however A0 shows 0v
The pin assignments for A0 and 1 have not changed from rev B to rev F, but the new AudioOut support might be doing something to interfere with AnalogOut.
On a Metro M4 rev F, the above code works and sends 3.3V to A0.
Yeah, we should use the exe for windows. Looks good to me as well.
?showtimes
3D Hangouts - 11am ET Wednesdays
Show & Tell (YT only) - 7:30pm ET
Wednesdays Ask an Engineer - 8pm ET
Wednesdays Desk of Ladyada - Random hacker times
John Park's Workshop - 4pm EST Thursdays
Did you solder together the jumper on the back of the Rev B? The internal voltage reference is broken on the rev A of the SAMD51. The Rev F metro has it connected by default.
Hello all,
Has anyone had problems building today's master of CP for feather M0 Express?
I think commit 81d395d8256ce0b4d5a2a37dd2f4b5ec789da2a5 brought a problem:
common-hal/rtc/RTC.c:33:10: fatal error: hal_calendar.h: No such file or directory
#include <hal_calendar.h>
^~~~~~~~~~~~~~~~
compilation terminated.
@wide depot did you do git submodule update --init --recursive after the pull?
that might help
@stuck elbow Thanks - it did help. I have forgotten about the submodules.
The introduction of Zigbee support further extends Nordic’s comprehensive low power short range connectivity solution portfolio, which additionally includes solutions for Bluetooth 5, Bluetooth mesh and Thread.
Zigbee in CP? 😉
that might require considerable work
@sommersoft good catch on change to LOAD.
@tannewt just to clarify - if tick_delay is called with us > 1000 but interrupts disabled, you wan to just return immediately thus ignoring the delay request, correct? Do you want to raise an Error?
Has the USB host function of the M0 been integrated in circuitpython?
I'm not talking about talking to an usb host*
sigh Yes, that fixed it. I'll go update my boards now and throw the old ones in the trash :(
@jerryneedell, I'm not sure we can check for interrupt status. In the meeting yesterday I mentioned using the NVIC to check, but that only works if turning off those interrupts. When using the hal_atomic macros, no magic I can find to check interrupt status. Maybe add the option to pass the atomic flags object and re-enable the interrupts inside tick_delay? @tannewt, am I off and/or missing something here?
@stuck elbow http://prntscr.com/j6hpj4 mpy-cross quest - success

awesome!
though I admit it makes it a little less convenient to do development
hmm... wouldn't it be great if ampy had an option to run mpy-cross on a file before uploading it?
sounds good
I used this article https://learn.adafruit.com/micropython-for-samd21/frozen-modules#external-frozen-modules

How to use MicroPython with boards like the Feather M0 & Arduino Zero!
great!
special thanks for Tony (article author)
@timber lion ^^
Just an update...i've been 'porting' Adafruit's circuit python to rasp pi. yesterday, i couldn't figure out why send was failing. I got it to work....and had fun getting into the details of SPI + RFM69 register flags...anywho. YIPPEE!... on to receive...
you mean rpi baremetal?
what is rpi baremetal?
raspberry pi without an operating system
there is a port of micropython for it
running mp directly on the board, without linux
oh...sorry. No...i do not understand stuff enough for that. Raspberry Pi w/ Raspian...i wanted to write my experience thing in python. where the other end is a Feather. I wanted to use Tony's library. Well, the RadioHead goop led me to port his stuff instead of crufting from an existing raspberry pi python rfm69 port.
ah, so you are porting from circuitpython to c python?
me, i sit back in awe of you folks that see the beauty in each and every bit. When I was younger, the group I was in had devs who debugged by looking at hex traces. No symbolic libraries for them...hhmmm..
i just took Tony's Adafruit_rfm69.py library (pure python - dah good stuff)...and put in the raspberry pi isms for SPI...and interrupt handling of RFM69 (offa DIO0 instead of polling)
oh that's interesting. the challenge with that is the reason i am using the raspberry pi is for db stuff..and connecting my nodes (running RFM69) to dah Internet via MQTT.
rfm69 is huge, I can barely get my head around nrf24l01
the amount of registers, options you can set, different modes
ah indeed. This is why porting offa Tony's and RadioHead's is not that bad. They've wrappered all this stuff. AND their code serves as examples with what the intent is with the datasheets. With that said, I am enjoying learning about PLL...I mean...I had no idea..
hello world , lol
@light pagoda Hello.
I come seeking help as I have no idea what I'm doing lol
Well - if it is related to CircuitPython, this is a good place to start 😉
What are you trying to do?
here's a link to the fourm post
I have 4 x 8 rgbw neopixels on a gemma M0 and I want them to blink a few time then fade to on and stay on
I got them to blink but can't get past that point
you r While True will just keep looping - is that what you want?
no just one loop
blink a few time then fade to on and stay on
didnt' even think of that
so get rid of the while True: (also remove the indentation)
@light pagoda good luck and let us know how it goes.
ok so now I have the blink and it goes once
now the fade to on and stay on, has eluded me for three days 😦 since I have never done any coding in my life
"bink a few times" --> use a loop, but not an infinite loop
infinite loop:
while True:
# code here loops forever
loop with specific number of cycles:
for _ in range(COUNT):
# code here will run COUNT times
@tidal kiln do you know the resolution of brightness = I see .02 -- is that meaningful?
@tidal kiln its funny because I just wrote this function....```def blink(count, delay, color, brightness = 1.0):
# save current brightness setting to restore
old_brightness = strip.brightness
strip.brightness = brightness
for _ in range(count):
strip.fill(color)
strip.show()
time.sleep(delay)
strip.fill((0,0,0))
strip.show()
time.sleep(delay)
# restore original brightness
strip.brightness = old_brightness
brightness (float) – Brightness of the pixels between 0.0 and 1.0 where 1.0 is full brightness
I only want it to go through once every time it's powered on
got that, but I was just curious what it could resolve. I'll dig into it later.
or more like is .02 different than .03 and what is non-zero....
@solar whale i think it'll be whatever float is for current cp version, for the value, but then some truncation may occur when it actually gets used:
https://github.com/adafruit/Adafruit_CircuitPython_NeoPixel/blob/master/neopixel.py#L227
so what do I need to do now to get it to fade after it blinks?
vary brightness. in a loop.
fade to on I mean
@tidal kiln so it scales the actual setting (0-255) by the brightness - so there are 256 possible values - or resolution of ~.004
think of off as a brightness of 0, and on as a brightness of 1
@carter thank but how do I stanslate that to the code as I really am fumbling in the dark here
*thanks
I think this function will do it...anyone see any issues? ``` def fade_up(color, milliseconds, start_brightness = 0.0, end_brightness = 1.0):
strip.brightness = start_brightness
strip.fill(color)
strip.show()
# use max to prevent div from being 0.0
div = max(0.001, float(end_brightness - start_brightness))
inc = float(milliseconds) / div
sb = start_brightness
while sb < end_brightness:
strip.brightness = sb
strip.show()
# clamp decimal places to 2
sb = ((sb + inc) * 100.0) / 100.0
strip.brightness = end_brightness
strip.show()
sor of , but you can set a pixel "intensity" from 0 - 255 for each color - but then the brightness just scales that. so setting it to 200 with a brightness of .5 is the same as setting it to 100. the brightness is a nice way to limit the maximum settings.
sorry - this is off-topic for this case - I was just thinking "out loud"
@opaque patrol my comment was to @tidal kiln not related to your code
is milliseconds intended to be used for some kind of timing?
when working with just a base color, (red, green or blue), I find it easier to adjust that value like @solar whale mentioned
@tidal kiln yeah, how long it should take to go from start to end, say 3000 for 3 seconds
should there be a time.sleep()?
I was wondering if I needed a sleep, I don't think so
getting this error?
change them to start_brightness=0.0, end_brightness=1.0
If you copy/pasted the code, make sure it uses tabs or spaces that are consistent with the rest of your code....
those spaces shouldn't matter, it may have to do with where / how you are trying to define the function
that working but it's not fadeing it's just doing another blink?
try commenting out the blink code so it just fades to on
@light pagoda one thing to watch out for is white space and indentation, it is used in circuitpython (and python) to determine segments of code
hmmm not getting anything
how to markup code:
```python
code goes here
what do you mean markup?
for pasting code here
to make it look like this:
print("hello world")
ahh 😃
you need to call the fade_up function
hmm
also, you can edit a previous post
so you can go back and add the ticks, you need them at the top (start) and bottom (end)
super code comes here
the ticks are the main thing, so you can just do this:
```
code goes here
code test
adding python after the first set of ticks tells it what language it is
upper left on keyboard (typically), same key as ~
there it is
from digitalio import DigitalInOut, Direction
import board
import neopixel
import time
import pulseio
pixpin = board.D0
numpix = 32
led = DigitalInOut(board.D13)
led.direction = Direction.OUTPUT
strip = neopixel.NeoPixel(pixpin, numpix, bpp=4, brightness=.4, auto_write=False,)
color1 = (100, 0, 0, 90)
color2 = (200, 0, 0, 30)
color3 = (255, 0, 0, 0)
color4 = (0, 0, 255, 0)
strip.fill(color1)
strip.show()
time.sleep(.001)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.01)
strip.fill(color2)
strip.show()
time.sleep(.1)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.1)
strip.fill(color3)
strip.show()
time.sleep(.1)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.2)
def fade_up(color, milliseconds, start_brightness=0.0, end_brightness=1.0):
strip.brightness = start_brightness
strip.fill(color3)
strip.show()
# use max to prevent div from being 0.0
div = max(0.001, float(end_brightness - start_brightness))
inc = float(milliseconds) / div
sb = start_brightness
while sb < end_brightness:
strip.brightness = sb
strip.show()
# clamp decimal places to 2
sb = ((sb + inc) * 100.0) / 100.0
strip.brightness = end_brightness
strip.show()
there we go
and just a single set of ticks for inlining, like this: `code`
to make that look like code
the fade_up is a function, you would then need to call the function...
I am testing it now on a cpx, doesn't 'appear' to fade in like I thought it would
can you explain how I would call it, sorry if this is a dumb question
just the name of the function along with values for the parameters
something like:
fade_up((255,0,0), 2000)
which would use the default values for start and end brightness
or, you could set those if you want:
fade_up((255,0,0), 2000, 0.2, 0.8)
just a thought - can the gemma handle brighnesss = 1
yes it can
basic function definition / usage is like:
# define the function
def foo():
print("hello world")
# elsewhere in code, use it
foo()
Change the inc = line (math was backwards) and don't worry about clamping the decimal places... ```
def fade_up(color, milliseconds, start_brightness = 0.0, end_brightness = 1.0):
strip.brightness = start_brightness
strip.fill(color)
strip.show()
# use max to prevent div from being 0.0
div = max(0.001, float(end_brightness - start_brightness))
inc = (div / float(milliseconds))
sb = start_brightness
while sb < end_brightness:
strip.brightness = sb
strip.show()
sb += inc
strip.brightness = end_brightness
strip.show()
where would I put the fade_up((255,0,0), 2000, 0.2, 0.8) as I think im putting it in the wrong spot as it says it's undified
see my simple example above
the print world?
nope, that's the function. it's a simple example, so only has one line.
also there are no parameters being passed in, so it's just empty ()
and then to "call" the function, i.e. make it go, the syntax is:
foo()
@light pagoda in your code, these are function calls.```
strip.fill(color1)
here's a simpe example with a parameter being passed in:
def foo(name):
print("hello " + name)
and then somewhere else, i could call this function with:
foo("marty mcfly")
ok starting to understand 😦 lol
this line 'defines' the function and everything indented after that is part of the function, ```
def fade_up(color, milliseconds, start_brightness = 0.0, end_brightness = 1.0):
Until a line that isn't indented,
ok
strip.brightness = start_brightness
strip.fill(color)
strip.show()
# use max to prevent div from being 0.0
div = max(0.001, float(end_brightness - start_brightness))
inc = (div / float(milliseconds))
sb = start_brightness
while sb < end_brightness:
strip.brightness = sb
strip.show()
sb += inc
strip.brightness = end_brightness
strip.show()```These are the parameters ```
color, milliseconds, start_brightness = 0.0, end_brightness = 1.0
this should go after the blink right?
and the start_brightness and end_brightness have default values assigned to them which means they are optional. If you omit them, they will use the defaults
The function def can go anywhere as long as it appears before you call it, but calling the function should go after the blink code
You can also call it multiple times, which is why I created a function
from digitalio import DigitalInOut, Direction
import board
import neopixel
import time
# import pulseio
pixpin = board.D0
numpix = 32
led = DigitalInOut(board.D13)
led.direction = Direction.OUTPUT
strip = neopixel.NeoPixel(pixpin, numpix, bpp=4, brightness=.4, auto_write=False,)
color1 = (100, 0, 0, 90)
color2 = (200, 0, 0, 30)
color3 = (255, 0, 0, 0)
color4 = (0, 0, 255, 0)
strip.fill(color1)
strip.show()
time.sleep(.001)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.01)
strip.fill(color2)
strip.show()
time.sleep(.1)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.1)
strip.fill(color3)
strip.show()
time.sleep(.1)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.2)
def fade_up(color, milliseconds, start_brightness=0.0, end_brightness=1.0):
strip.brightness = start_brightness
strip.fill(color)
strip.show()
# use max to prevent div from being 0.0
div = max(0.001, float(end_brightness - start_brightness))
inc = (div / float(milliseconds))
sb = start_brightness
while sb < end_brightness:
strip.brightness = sb
strip.show()
sb += inc
strip.brightness = end_brightness
strip.show()
I really feel like an idiot, I may just quit this lol
if it is confusing, just get rid of the function and use this code instead ```
fade in color
strip.fill((255, 0, 0))
start brightness
sb = 0.2
end brightness
eb = 0.8
while sb < eb:
strip.brightness = sb
strip.show()
sb += 0.005
time.sleep(0.04)
this sets the color with the fill function, then sets the start and end and the while loop increments the start until it reaches the end. You can play around with the values for increment and in the sleep function in the loop to change how fast it takes
nothing................ i'm just going to put my head in the paper shredder
did you get an error message
just nothing happened but the blink cycle
Tolerate feeling foolish. It'll pass.
the code I pasted for an RGB strip and not an RGBW strip, you need to add a ,0 to the color or replace it with one of your color variables.
thanks but I'ma mechanical engineer yet i've never done programming and I feel i should get this
One of the ways to get good at programming hardware is to keep your eyes on the screen while typing -- this speeds each iteration of write some code -- try it out on the hardware.
Touch typing is essential to good progress, and is worthwhile learning to do it, if you don't do so already.
so now it blinks a few time then stays on - Just need the fade part before it turns on - i'm sure i'm missing something
from digitalio import DigitalInOut, Direction
import board
import neopixel
import time
# import pulseio
pixpin = board.D0
numpix = 32
led = DigitalInOut(board.D13)
led.direction = Direction.OUTPUT
strip = neopixel.NeoPixel(pixpin, numpix, bpp=4, brightness=.4, auto_write=False,)
color1 = (100, 0, 0, 90)
color2 = (200, 0, 0, 30)
color3 = (255, 0, 0, 0)
color4 = (0, 0, 255, 0)
strip.fill(color1)
strip.show()
time.sleep(.001)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.01)
strip.fill(color2)
strip.show()
time.sleep(.1)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.1)
strip.fill(color3)
strip.show()
time.sleep(.1)
strip.fill((0, 0, 0, 0))
strip.show()
time.sleep(.2)
# fade in color
strip.fill((255, 0, 0, 0))
# start brightness
sb = 0.2
# end brightness
eb = 0.8
while sb < eb:
strip.brightness = sb
strip.show()
sb += 0.005
time.sleep(0.04)
I got it!
I just needed to change some values
I was going to say, it is probably fading up so fast, that you don't see it...
nice! Well done @opaque patrol and @tidal kiln
@tidal kiln sorry for the brightness distraction while you were working this. It was something I had been thinking about but never bothered to dig into. I understand it much better now.
me too , kinda lol
um, is the recent cp supposed to work on Trinket M0?
because I can't get master to work on it
I get purple LED and no USB
@stuck elbow recent = ?
current master
@stuck elbow will rebuild and try - It was working a few days ago..
ah. so cutting edge latest.
my build setup is probably way behind. thanks @solar whale, i'll let you take a look.
hard part is finding the trinket on my desk 😉
hint: it's very small, and wafer thin
mine works, but not absolutely latest master it was from 2 days ago - I'll update and try again.
hmm more changes tahtn I expected -- building
remember to update submodules
will you post an issue?
I will, thanks for confirming
glad to - I suppose I should try in on something else.
It seems that the current master (7f7cbe8efa7d61683872fa93629491bce7ef5135) breaks Trinket M0 — after flashing the device doesn't appear as USB at all, and the LED is purple. It is working with 3.0.0-alpha.4, so the breaking change must be somewhere in between. I'm now trying to find which commit breaks it.
works OK on metro_m4_express_revb
I'm afraid it might be the audio stuff
FYI - I reproduced this on a Trinket_M0 -- I also built for my metro_m4_express_revb and it seems to be working OK.
I just tested it with a Feather M0 Express, and it works fine, but it doesn't work with the µGame 10 board — so it probably only affects crystalless boards.
actually, scratch that, feather works
is there anyway to get this to blink faster, i've tried changing the value to even .004 and dosn't seem to go any faster
strip.fill(color1) strip.show() time.sleep(.04) strip.fill((0, 0, 0, 0)) strip.show() time.sleep(.01) strip.fill(color2) strip.show() time.sleep(.1) strip.fill((0, 0, 0, 0)) strip.show() time.sleep(.1) strip.fill(color3) strip.show() time.sleep(.1) strip.fill((0, 0, 0, 0)) strip.show() time.sleep(.002)
the other commands take some time too, so there is a limit at how fast it can go
and you can only go so low with the value passed in:
https://github.com/adafruit/circuitpython/issues/429
double 0 numbers are gettting near there
just tested this:
while True:
cpx.pixels.fill((255,0,0))
cpx.pixels.fill((0,))
and it's fast, but not super fast. i think you're just hitting a limitation of current speed capability
bummer, but it'll do
@light pagoda try setting dark = (0,0,0,0) and just using the variable name. That may save a bit of time. And just take away the time.sleep() calls, which will also save time.
thanks man just did that and it's a bit faster
@light pagoda You can also try setting the brightness to 1.0 and adjusting the color values to control the brightness. Then the neopixel library won't need to calculate the brightness level.
every 'show' costs time.
@stuck elbow @solar whale testing Trinket too, while testing a new vagrant box using xenial instead of trusty...
@tulip sleet for gcc7, are you using that PPA from "jonathan-something". the only packages on ubuntu's page are for artful and bionic...
third confirmation of no-USB-Trinket mode.
CP3.0 fails for Gemma M0 as well....
wish I was able to build with DEBUG on...
won't fit?
nope. 14K over...
/usr/bin/../lib/gcc/arm-none-eabi/7.2.1/../../../../arm-none-eabi/bin/ld: build-trinket_m0/firmware.elf section `.text' will not fit in region `FLASH'
/usr/bin/../lib/gcc/arm-none-eabi/7.2.1/../../../../arm-none-eabi/bin/ld: region `FLASH' overflowed by 14396 bytes
intersting - just discoverd taht the build I was using to test DHT on feather_m0_express does not work on gemma_m0 - that would have really confused me yesterday!!
dmesg says it cannot read the boot sector of the FS
turning -flto back on gets me down to "over 4K"... dare I remove -fno-inline? 😄
without debug on, I can at least see that the callstack is in main.c. but "line: 934302385" is not exactly helpful. haha
my guess it it ends up in ___fatal_eror
also fails in same way on gemma_m0.
@raven canopy I am going to add the 2 minor twaeks to the PR - fix LOAD and don't disable interrupts for > 1000 just so I don't lose track of them.
hey all, sorry trinket usb is broken!
got debug working. -flto on and -fno-inline -fno-ipa-sra off...
I've been traveling all day 😃
what was it you said to me a couple months ago: "Move fast and break things." 😛
Entirely.
added minor updates - adjust LOAD value to ticks_per_ms -1
do not enable interrupt on common_hal_mcu_pulsein_resume if trigger_delay >= 1000
yup, and the converse is "fix things fast" 😃
nice - break it and leave town 😉
@raven canopy I am using this ppa: https://launchpad.net/~team-gcc-arm-embedded/+archive/ubuntu/ppa. It doesn't have bionic yet: https://answers.launchpad.net/gcc-arm-embedded/+question/665673
that's the "official" ppa
stepping over for a couple minutes, stuck in a 3 line loop starting at:
hri_sysctrl_get_PCLKSR_XOSC32KRDY_bit (const void * const hw = 0x40000800) Line: 798
ah, thats likely the rtc stuff
thanks @tulip sleet. i'll run vagrant in xenial for a while, and update the repo if all is well.
I think it assumes the external clock
I just put in '-fno-inline' recently for debugging ease recently, but I've done lots of gdb debugging without it.
full stack:
(gdb) bt
#0 hri_sysctrl_get_PCLKSR_XOSC32KRDY_bit (hw=0x40000800) at asf4/samd21/hri/hri_sysctrl_d21.h:798
#1 _sysctrl_init_sources () at asf4/samd21/hpl/sysctrl/hpl_sysctrl.c:127
#2 _init_chip () at asf4/samd21/hpl/core/hpl_init.c:80
#3 init_mcu () at asf4/samd21/hal/include/hal_init.h:68
#4 port_init () at supervisor/port.c:123
#5 main () at ../../main.c:229
Bringing some "insight" over from discord. Just want to keep the discussion up-to-date...
Stepping through in debug, Trinket is getting stuck in a loop here:
(gdb) bt
#0 hri_sysctrl_get_PCLKSR_XOSC32KRDY_bit (hw=0x40000800) at asf4/samd21/hri/hri_sysctrl_d21.h:798
#1 _sysctrl_init_sources () at asf4/samd21/hpl/sysctrl/hpl_sysctrl.c:127
#2 _init_chip () at asf4/samd21/hpl/core/hpl_init.c:80
#3 init_mcu () at asf4/samd21/hal/include/hal_init.h:68
#4 port_init () at supervis...yeah, my guess is that its the PR from notro that I merged
maybe we should disable RTC if we don't have an external crystal?
or is there an internal 32k osc?
scans room for someone to answer 🤣
i vaguely remember there being an internal from dances with atmel start. but that may be a genclk that i'm thinking of.
i'm trying reverting pr 745 that added the RTC
@raven canopy I think you are right
@slender iron according to START, there is a 32K internal OSC32K.
cool! shouldn't be too hard to fix then
#ifdef CRYSTALESS (or thereabouts)?
Trinket does boot with pr 745 removed
probably easiest to change it to always using the internal crystal
in asf4_conf if I remember right
the RTC commits did change them to XOSC32K in asf4_conf. also turns on the external osc. is that not handled in the ld's?
no for the samd21 its in the other board related files
for samd51 I think we're always crystalless
Guys, what wireless protocols can be handled by CircuitPython and on which boards? e.g. BLE, LORA, WiFi?
yeah. just found it in CPX's mpconfigboard: CALIBRATE CRYSTALLES 1?
@gusty topaz we have initial libraries for RFM69 and RFM9x (LoRa). The ESP8266 version of CircuitPython supports the Python wifi functions on that chip.
you could use a serial-based BLE adapter, but there's no special library
@gusty topaz also some alpha BLE on the feather nrf52
@jerryneedell I wouldn't raise an error because this is deep in C land. I'd either do 0 to make it obvious something is wrong or 1000 to make a best effort.
You should be able to check interrupt status by reading PRIMASK. https://github.com/adafruit/asf4/blob/02e264253c76b85c567ecdfce69ad0de0970da63/samd51/hal/src/hal_atomic.c#L56
Its an arm core thing so you'll likely find documentation on that register there.
@tulip sleet yeah, I imagined so with regards to WiFi options.
@raven canopy I'm confusing myself with how 2.x did it
I don't think 3.x uses the crystal at all yet
no crystal use on any boards on 3.0
so configuring the RTC to use the internal 32k and filing an issue to make external crystal work would be enough
@solar whale Yeah, I actually have the nrf52 in front of me, but I was planning to use Arduino IDE with it since I heard that BLE support (alpha) is really basic as of today.
good ble support for the nrf52 will come after CPy 3.0.
.. although I would love to code in CP instead of dealing with C/Arduino.
you got it!
@gusty topaz I don't know enough BLE to be bothered by the limitations at this point 😉 I see that the Arduino BSP has had a ton of development recently.
@slender iron all good! samd21 sheet has this to say: The RTC is typically clocked by the 1.024kHz output from the 32.768kHz High-Accuracy Internal Crystal Oscillator(OSC32K). even if an external clock is available, would the internal suffice? they'll be synced right? of course, if external is present, internal could[should?] be disabled...
@raven canopy internal should be pretty good but I think externals can be better. Its safe enough for us to ignore the external for now though.
@solar whale well, my BLE knowledge is almost "0" too, but I get the impression an "alpha" version is probably not the wise choice when trying to learn. 😃
@raven canopy does it say "High-Accuracy Internal Crystal Oscillator(OSC32K)"; the internal does not use a crystal.
@tulip sleet Is there a ETA for support of BLE on CP? Ballpark?
FWIW - reverting PR_745 ( added RTC) seems to bring Trinket_M0 and Gemma_M0 back to life. They Boot and CIRCUITPY is mountable.
Note: with PR 745 removed, on the Gemma_M0 the dotstar flashes - sort of red/purple until REPL is entered - then is goes white as usual. Trinket m0 does the normal green fade prior to REPL.
we don't do ETA's; it's done when it's done, but consider that we haven't finished 3.0 yet, and this will be after that.
@tulip sleet that's pasted from the sheet. i'm thinking it's a semantic thing though? another vague memory: internal oscillator is based off the genclk and divided...
I think OSC32K is an internal RC clock. Downloading a PDF reader now to confirm 😃
on a laptop, not my regular machine
here is the word usage in the SYSCTRL section: "32.768kHz High Accuracy Internal Oscillator (OSC32K)"
@tulip sleet Got it.
i think it's just a typo when they said "Crystal"...
wishful thinking 😃
touché
@gusty topaz we'll get to BLE. We've just gotta polish up 3.0 and the SAMD51 first
BLE is very interesting because it really enables phone/tablet connectivity
Yep.. exactly.
wait... why is the Adafruit Feather M0 with RFM95 LoRa Radio - 900MHz listed as hardware supporting Circuitpython/Micropython on Adafruit? : https://www.adafruit.com/category/924
Adafruit Industries, Unique & fun DIY electronics and kits : Micropython & Circuit Python - Tools Gift Certificates Arduino Cables Sensors LEDs Books Breakout Boards Power EL Wire/Tape/Panel Components & Parts LCDs & Displays Wearables Prototypin...
@gusty topaz See the CPy sections in this guide: https://learn.adafruit.com/adafruit-rfm69hcw-and-rfm96-rfm95-rfm98-lora-packet-padio-breakouts

Radio transceiver modules for long distance data communication
Goodnight all - sorry I can't stay up and follow the progress. Good luck with it!
@tulip sleet ohhh... sweeet!. You da man Dan!.
night @solar whale!
not me - Tony DiCola wrote those libraries - did a great job getting them to work
I mean, thanks for letting me know!.
I didn't know he had worked on it. I've seen a bunch of his tutorials, I almost feel I know the guy. 😃
reverting XOSC32 to OSC32 did the trick. let me verify RTC still working, then I'll put in a PR.
is RTC's epoch 1 Jan 2000? being lazy by asking here... 😄
I don't know @raven canopy
k. i'll look it up.
sorry I'm not more helpful. my brain is lacking sleep
haha. it's all good. you're going to sleep until like noon tomorrow...
if you're lucky enough, that is. 😄
and the documentation doesn't say what epoch is. might want to get notro to put that in. i'm pretty certain it is 1 Jan 2000 if you don't set a source...
feel free to ping them
sure
seems to work fine on Trinket now. building feather m0 express to test that.
I'm off to bed. will review tomorrow. thanks @raven canopy
night! no worries. teamwork makes the dream work... ⏭
👍
This reverts asf4_configs to use the internal 32Khz oscillator for the RTC clock. Use of external oscillator was causing crystalless boards (Trinket, Gemma, µGame, etc) to not boot properly. See Issue #767.
Tested this on both Trinket and Feather M0 Express (without external RTC source). Functions seem to still work properly, and the clock is human-accurate (well, for me thru 16 minutes). Reverted SAMD51 configs as well, but cannot test them yet.
just noticed my redundant statement "Real Time Clock clock". ugh. 🤦
built and executed on metro_m4_rexpress_revb -- seems to work OK.
Are there plans to make circuitpython for the esp-wrover?
you mean the esp32?
Yeah but with the 4MB extra ram
The 4mb extra ram would make it ideal for circuitpython
there is a fork of MicroPython done by Loboris that supports it
as far as I have heard, CircuitPython plans to have esp32 support eventually, but not any time soon
no idea if that will include the spi ram support, but it's a possibility
@raven canopy in Polish we call such terms "buttery butter"
Ok great!!
In English you could call it pleonasm
it comes from Greek, but same word is used in English and Swedish too
PCB board 😄
smd device
@stuck elbow how many ugames did you send to adafruit?
This is fixed by #768