#serious-discussion
1 messages · Page 306 of 1
Please show the original problem, exactly as it was stated to you, with the entire original context. A picture or screenshot is best. If the original problem is not in English, then post it anyway! The additional context might still be helpful. Do your best to provide a translation.
what it means to apply xy
thats not even an equation
or is it gprod wraith?
It's all wrong don't do this
$x\wedge x = 0, x\wedge y = -y\wedge x$
Yeatte

that makes sense
$xy$ transforms $v$ as $(xy)^{-1}v(xy)$
wraithlord_kojima

oh that thing yeah
that looks like linear algebra
Let me finish this job and I'll tell you what's what kids
I'm actually so invested and I am not even sure if I know where this is all going
man I forgot too
I didnt even know GA was a thing till a few hours ago
We'll hopefully achieve a derivation of the sandwich product between arbitrary versors in arbitrary geometric algebras over arbitrary Fields
theres a sandwich product???
Yummy innit
in the next episode
It's going straight to the heart of physics
please ping me if you have the time to explain all of that
Unironically
I'm hoping to free up in like 4 minutes here
thats a really cool cliffhanger
Shouldn't take long to explain the mirrors
dont underestimate me
while wraith is gone I'll go back to quaternions >:)
Trust, we start with relatively few definitions and like 2 intuitions
my powers of doubting till I understand everything are immense
okeokeoke
start from beginning
I forget the beginning tho 
hahahah
pick somewhere and start there
any new knowledge is fine
ill prolly backtrack with questions abt everything
really tho, wraith will do a much better job of explaining Geometric Algebra
It's fine, you can try your way
I only have a small bit of knowledge about it because I needed it for cursed physics euqations
thats really cool to me
there isnt even a channel in the mathcord for it
do you know cross product? it's where I needed to end up using it in 3D
yessss
like i×j= k and stuff
I learnt abt it few days ago. relearned actually but ye
the cross product works in 3D, as it takes two vectors and gives back the vector that is perpendicular to the 2
however, in 4D, you don't have just 1 vecctor perpendicular to i and j vectors, you have many more
and there is always one unique vector that is perpendicular to any two vectors?
yep
ahhh I see
unique up to scaling
natrually, if we want to work in 4D using things similar enough to the cross pdocut, we need osmthing new
this occured when I was working with derivatives using time, x,y and z isntead of just x,y,z
something that gives out a unique result
yes
I see I see
And what is the answer to that?
do we just one up the conditions to be met?
the wedge product acts quite similar to the cross product
but it stays in the same plane when wedging two vectors, no?
yes
how is it any similar then?
$i\times j = -j\times i = k \ x\wedge y = -y\wedge x$
Yeatte

hmm
in this case rather than another thing k, we just leave it as and think of the thing as a 2-blade on its own
Alright I am present

Hi present, I'm zan.
I don't get that
let's let wraith do it
okeokeoke
the wege is not entirely the same as the cross, as we ignored the existsnce of 1-blades vs 2-blades tho
Let us begin with a vectorspace V over a field F, for motivation we will look at examples from R^3 and R^4. We equip this space with a symmetric bilinear form, examples will use the Euclidean dot product and perhaps a minkowski interval
^
Any questions so far
yes
lemme think of them
what does it mean to equip a space with a bilinear form?
and a symmetric at that
Excellent question, it means that we have a Bilinear form, a map that takes two vectors and gives a scalar, and if you make either argument constant it is linear in the other
Symmetric means that it is commutative
So B(u,v)=B(v,u)
This is essentially what defines lengths and angles
Two vectors are perpendicular or orthogonal if B(u,v)=0
The squared length of a vector is B(v,v)
huhhhh
This is a Definition
you can think of it as the dot product
That's what orthogonal means
is it because they end up in the same place?
yes, is that the same thing?
The dot product is an example of what were talking about
The easy ubiquitous example
the dot product is a particular symmetric bilinear form, yeah
Everything else can be derived by say flipping the sign on some terms of the dot product, or ignoring some terms
hmm I see
x^2-y^2, throw away z^2 for example
For a less trivial one
So yes the dot product is your motivating example
Think about dot products in 3D
oh, you don't even assume non-degeneracy
No need
thats not so easy for me
Let $v$ be a vector s.t. $B(v,v)\neq 0$, there is a subspace $U<V$ s.t. $u\in U \iff B(u,v)=0$
wraithlord_kojima

so anything that takes two vectors, and spits out a scalar has a bilinear form?
It has to be linear in either argument
Or in other words, distributive property
(Plus commutes with scalars)
sure (this is where non-degeneracy comes in  )
)
 ill be back later
ill be back later
This is the orthogonal complement to $v$
wraithlord_kojima

okeoke have fun whatever youre doing
Taking inspiration from the Euclidean plane, and using that B(v,v) is the squared length of v, it may be easy to see that
$P_v(u)=B(u,v)\frac{v}{B(v,v)}$ is the projection of $u$ onto $v$
wraithlord_kojima

Do you see this?
not really
I'm too much of a rookie to keep up with your definitions sorry
One may use that the dot product B(a,b) is equal to |a||b| cosθ
Sad, we'll pare it back then
So if I want to project one vector onto another, do you know how the dot product does it?
This
uhm
Then the angle between them is 0, its just the product of vector lengths
When the angle between them is 90 degrees, its 0
what does it mean to project a vector unto another?
Obie
yes I understand that
this too
like we do in geometry?
okay sure
So like P_x(x+y)=x
so the projection of i to j, dotted with j is 0
No
sorry
bad examlle
take i and j to be non perpendicular
lol
So check it out the dot product between two vectors u,v; projects the vector onto the other and multiplies their lengths
So we need to get rid of the length of the vector we want to project onto, so it doesn't stretch it out, right?
I think
So we want to say $P_v(u)=(u\cdot v) v$
Where $\norm{v} = 1$ right?
wraithlord_kojima

how do we achieve that
Wdym
AHAHAHAHAA
HEYYYY
That's the catch!
I am still learning linear algebra intro stuff
If we have a good nice well behaved metric vectorspace, like the dot product we were using earlier
And the reals
We can just say v=v/||v||
that looks like the vector unit
And ||v||=sqrt(B(v,v))
unit vector or something*
Yeah
That's what it is
The issue is you need to take a square root
And you need B(v,v) to be positive
why can we just say that tho lol
You take some x that doesn't satisfy it, then make v=x/||x||
Then v satisfies it cus it's already normalized
But you can't do these normalization shenanigans in an arbitrary metric vectorspace over arbitrary fields so we need a slight change
$(u\cdot v)v$
whenever we can't normalize $v$, ends up with TWO extra factors of $\norm{v}$ which means $\norm{v}^2$
wraithlord_kojima

Which we CAN get without taking roots or caring about signs

HUH
Generally speaking, a unit vector might not even exist
Like in a rational vectorspace
But
So we have $P_v(u)= B(u,v)\frac{v}{B(v,v)}$
As $B(u,v)=u\cdot v$ and $B(v,v)=\norm{v}^2$
wraithlord_kojima

Because $B(u,v)v$ is $B(v,v)$ too big
wraithlord_kojima

.
This also works when B(v,v)<0, as happens in spacetime
this is so fucked up
Isn't it
I have another question!!!!
But you can project now!
Yeah?
no I can't
We're moving towards the quaternions slowly but surely
Do you not get the formula?
how tf do we go from not being able do normalize v, to ending up with TWO factors of |v|]?
So v=x/|x| right
If you see what books I'm reading you'll be surprised my head hasnt exploded yet
in terms of difference of skill
yes
So x= |x| v
Then B(u, x) x = B(u, |x|v)|x|v= |x|^2 B(u,v)v
Divide by |x|^2
Relabel x to v
Add a hat to the artist formerly known as v
how did we just pull out the scalar?
Excellent, next step we define a Clifford Algebra, or Geometric Algebra

You need a vectorspace V, and a symmetric bilinear form B, like we were just talking about
Then you say, we can multiply vectors
true
BUT, whenever I see v^2, replace it with B(v,v)
So let's see some consequences of this
Let x,y be orthogonal vectors, so B(x,y)=0. Then (x+y)^2=x^2 + xy + yx + y^2 = x^2 + y^2 + xy + yx
lemme decipher this
how did you just multiply x and y without a dot or a cross or whatever?
That's the geometric product, the Clifford product
The multiplication where x^2=B(x,x) and we say little to nothing else
By Pythagorean theorem, this is equal to x^2+y^2
we had the length of x, squared in our previous proof
Which implies xy+yx=0->xy=-yx
Correct
|x|^2=x^2=B(x,x)
This is going to be key to our simplification
I was going to make a point here about the wedge product and how it falls out but we dont need it actually
huhhhhh
This is by definition
Both of those are defined to be B(x,x)
yes that, I understand thank goddd
Here's what's up
B(x,x)=x^2, so x/B(x,x) = x/x^2, which is x^-1
So we can rewrite our projection formula again!
P_v(u)=B(u,v)/v
What even was our projection formula
And this one works everywhere
For now it's this
ohhh
We can also define (a•b)=B(a,b) to simplify stuff
But do you already see how its getting easier?
HAHAHA
brother
You don't think (u•v)/v is easy?
like
what does it mean????
ya know
you have no idea what a headache this shit gives me
like, why is this our projection formula to begin with?
Well we started with B(u,v)v with |v|=1 right
yes
We then showed that |v| can't be 1 sometimes, so we had to figure out a slightly different form for longer or shorter v, right
never noticed that but ok lol
Well I didn't show you a counter example just said they exist
So take the rational plane, Q^2, and look at the subspace spanned by (1,1) so pairs of rational numbers of the form (q,q)
Notice there is no vector of length 1
In particular such a vector would have q=sqrt(1/2) which is not rational
So it's not in the rational vectorspace we were looking at
how am I supposed to visualize this
The rational points of the plane
This is standard geometry
wait so this was a counter example that you didnt provide earlier?
It means that there are triangles with rational sidelengths that are similar to triangles with irrational side lengths and longest side length=1
Yes
An example of why we can't normalize
We might not have the number we need to normalize with!
how is that the result omg lol
Another example is imagine B(v,v)=-1, we have no imaginary unit in the reals to "normalize" with
actually, a better question would be; how do we fix this problem? but you can answer both
Well consider the special case of an orthogonal basis of Q^2, then we can form right triangles with rational sidelengths. The hypotenuse is the longest side and the norm of the vector. So if we scale such that the hypotenuse is unit length, the sidelengths are no longer rational
By not normalizing, or more specifically not taking square roots which begins the mess
And divide by the squared length
now thats true af
how doth that help?
It corrects for the stretching done by not getting to normalize v
I see
Since we use the stretched v twice, it will stretch by the square of its magnitude
So we cancel this out
Now it turns out, that v divided norm v^2, is equal to v^2 by our little definitions up there
x^2=B(x,x) if you remember
why do we use it twice?
So x * x/B(x,x)=B(x,x)/B(x,x)=1
Look at the projection
B(u,v)v
what does v divided norm v^2 even mean?
x/B(x,x)
We divide it by the square of its length
So shrink it if its big, expand it if its small
That way if it was shrinking vectors before, it stretches them out now
I get that part
So we say B(u,v)v^-1, so the two v's stretch in opposite ways but still represent the same direction on the same line
And the stretches correct eachother, the same as if you had a unit v and used our first formula
how how how how
I'm so sorry for the brain rot
I'm not crashing out, just sayin
Lmfao
I understand how it works in a similar function. I just dont get that previous chat
I dont get why this is true
If so ignore
Yes
So now earlier I told you about the orthogonal complement of a vector do you remember
The set of vectors that have a dot product of 0 with your chosen vector, the orthogonal complement
so the orthogonal complement is a set of vectors?
This is the same thing as the hyperplane orthogonal to the vector. Now I pause for example
Yes
Example, the y axis is the orthogonal complement of (any vector on) the x axis
The X,Y plane is the orthogonal complement to the Z axis
The present moment is the orthogonal complement to the forward arrow of time
Get it?
HUH
lmao
It's to help you understand so if you dont get it, move on preferably
As it is not the point, merely beside it
Anyways
I understood the other two
So let's say you look at a mirror, you are looking along the vector that is the orthogonal complement of the mirror, a normal vector right
We dont even care if its unit, just orthogonal
How do you reflect a vector u across the mirror represented with normal n?
Can you see it?
what do you mean "reflect"?
I mean that every point on the mirror should be unchanged, distances should be preserved, and if you were on one side of the mirror before, you're on the other now
Flipping across a line
Right?
yes(?)
Alright so can you guess how to reflect a vector u across the mirror normal to n, or v, or whatever you wanna call it
If I tell you that you use the projections we just discussed
first of all
we are implying that a mirror has actually something on the other side
like mirror dimension

celeste and shi
We are just using the reflectional symmetries of space to talk about transformations on space
I prefer the mirror world
It turns out that EVERY distance preserving transformation is made up of reflections
Rotations, translations, screw motions, it's all about composing mirrors on mirrors
So this is the first step
Reflecting through 1 mirror
You can get philosophical if you really wish
But no such statements are concretely implied unfortunately
no man I wanna get mathematical
how tf is that a theorem lmao
It's true
Try it out
Play with your left hand and right hand
Imagine mirrors between them
Reflect them around
how do i even do that lmfao
Notice how reflections through intersecting mirrors rotates your hand around the axis
Just do it lol
Put your hand out
alright
Put your arm out as a mirror
Move your opposite hand to the opposite side, as your first hand takes the place of the arm


I'm grabbing the gif
pause man pause
how do I put my hand out while using my arm as a mirror
like
what?
as you can see I'm not a very bright individual
So put your hand out, somewhere
Now choose where you want a mirror to be, place your other arm there as a bar to mark it
palm down, up, sideways?
Any way you want
alright
.
I have chosen my mirror
Now in one motion you
- put the opposite hand (the one on the arm acting as a mirror), on the other side of the mirror, facing the first hand like a reflection would
- make the first hand take the place of the mirror, to mark your spot still
Can you do this?
It's not the easiest but if you can strongly visualize the mirrors you're using as you do it, it works out
So i mirror one hand, then the other
Yes
Two reflections
Notice how your hand just rotates around where the mirrors would meet
Or if they would never meet (parallel), your hand translates in a straight line
how the?
when did we have two mirrors
Is that amazement or confusion
latter
I said do it twice
and do I visualize all 4 things?
the two hands, and the two reflections
like
Idk man
I feel stupid lmao

I know I am, its just not cool to feel it too
Not perfect illustration
THATS NOT WHAT YOU TOLD ME TO DO
Im calm btw
so
whats the black and white line?
Wordle 1522 4/6*
⬜⬜🟨⬜⬜
🟩⬜⬜⬜⬜
🟩⬜⬜🟩🟩
🟩🟩🟩🟩🟩
ah @heady pagoda
Yes it is
Two different mirrors
okay, and could you explain what each other curve is?
and the two spots ofc
I'm sorry. I've been at this for 5 hours now, and visualizing things has never been my strong suit
I did warn you of my incompetence
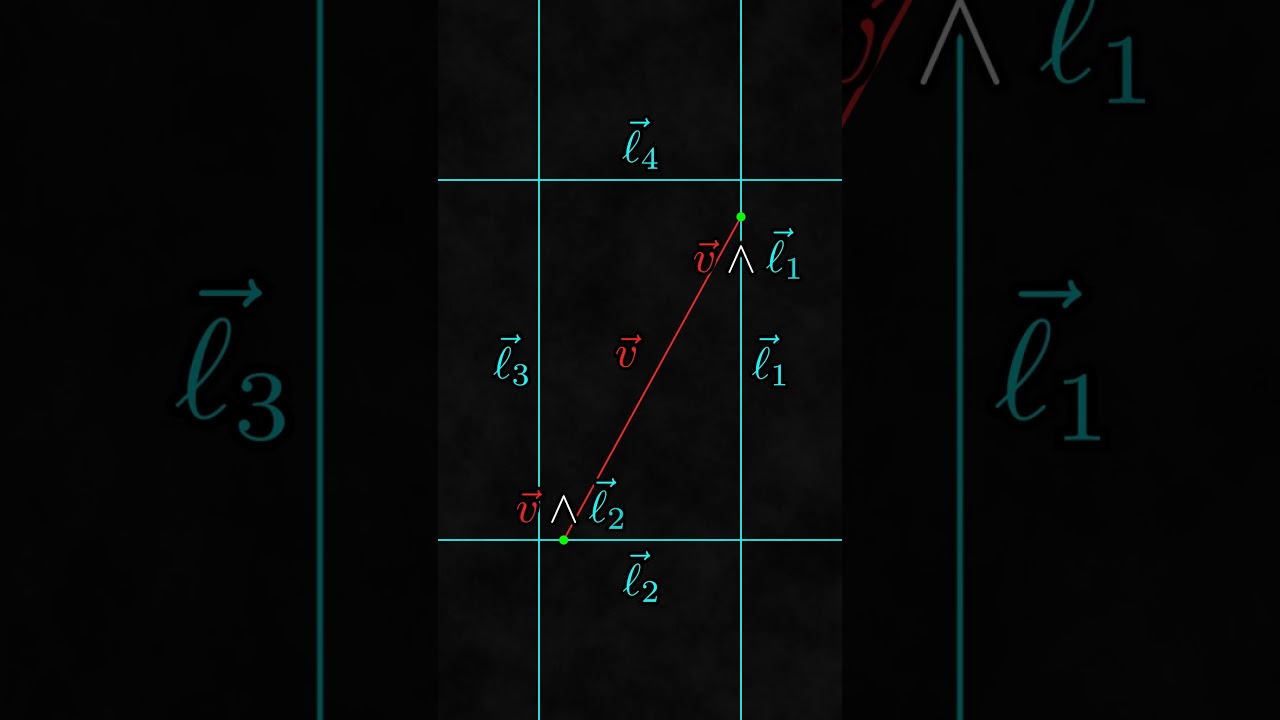
So given the blue point as a vector, and a vector for the black line, what is the yellow point
Color coded curves to show you step by step
Anyways the answer is, you subtract twice the projection onto the normal
if we entered the magical realm of mirror world it would be the reflection of the blue and the green point (?)
wtf
So far out

blue and yellow are obviously reflections of each other
You see Y=B+G, G=-2 P_N(B), Y = B - 2 P_N(B) is the reflection of B through N
Right?
Twice projection of B onto N
what is N?
$R_v(u)=u-2 P_v(u)$
wraithlord_kojima

u is a vector, v is a vector. Specifically we take v to represent its orthogonal complement
We can actually take both of them to represent their orthogonal complements and get the same result
can we stick to the simpler one
So the reflection of u THROUGH v, is u minus twice the projection of u ONTO v
Wdym
This is the same thing
Yeah we're summarizing and writing it up before we move on to the next piece
Questions shoot
u is the blue arrow, v is the black arrow
yes thank you
R_v(u) is the yellow arrow
waitttt are we in 3D?
Shhh, doesn't matter actually
because u and v arent perp
I'm drawing the picture in 2D
so we must be in 3D
But this equation we're working on holds in any dimension
No this example is in 2D
u and v dont need to be perp
This is general
oh true sorry
sorry my internet is getting hammered out of shape give me a moment
so the projection of u thru v is the blue arrow? or is it the green one
I love how you expected me to be able to sniff this out using my hands lmfao
The projection of u onto v is HALF the green arrow
Ahh its alright
I seeeee lemme check it out again i think i get it lol
I SEE IT NOW
I see it I see it I see it
Based!!
hahah its basic subtraction lmao
Ready for the next step?
no but lets go
Lmfao love the spirit
So armed with this formula for a reflection through v, we're missing one crucial identity for the geometric product uv
the geometric product is based on the fact that x² = |x|² right?
Specifically, we have uv + vu = 2B(u,v)
Yep
Some call this the contraction axiom
Vectors square to scalars
I mean i dont understand the reasoning behind this but ok
so uv=vu
It's one of those "because magic happens" things for now
Nope!
Wordle 1522 3/6*
⬛🟩⬛🟨⬛
⬛🟩🟨⬛🟩
🟩🟩🟩🟩🟩
So we can split uv into two terms
I liked it alot better when ur internet was hammered
what does this even mean? like, what is the difference between {} and []. and what does the comma in between u and v mean?
Swap u,v; you'll see that [u,v]=-[v,u]
{u,v}={v,u}
It's a function thing, those are definitions
so, do both these things just hold true? and how do we even use them here?
okeoke
You can eventually break it down into uv=u•v+u \wedge v
and we magically derive that uv+vu = 2B(u,v)
Yep, because the dot product commutes, and the wedge doesn't
So we end up with twice the dot product
interesting
I forget how to derive it exactly but I'm sure it's stupid simple and comes from squaring (u+v) or something
so the reason uv is not vu is the wedge?
Essentially yes
whoaaaa i get it
So the wedge product falls out of the geometric product
Where the dot product is 0
Look at this
If u^2=0 for all vectors, then
(u+v)^2=u^2+uv+vu+v^2=uv+vu=0
But we only have that to simplify
We can't say anything else about uv and vu except, uv=-vu
This is the wedge product
So u^v = - v^u
This encodes span!
why did u^2 and v² just vanish both?
u^u = 0
We take the dot product where everything measures to 0
Remember how I said sometimes we can throw away components from pythagoras?
This is then
So B(u,v)=0 for all u,v
This turns the geometric product into the exterior product
wtf man
this is serious manipulation
But the point is that it is hiding inside of the algebra we are trying to figure out
Sometimes we use it to make things easier
But uv+vu=2B(u,v) okay
Are we okay with this
Can we move on
youve defined this B function to be both a dot product and a GP if im not mistaken. Which one is it now lol
No, no it is not
I'm ok with this, yes
But in the special special case that you multiply a vector with itself, they look the same
lmao alright
The dot product and B are the same, for vectors
The GP and dot product are the same if you SQUARE a vector
yup
So we can actually plug this in
Look at our reflections from before
where do I plug it in at?
$R_v(u)=u-2P_v(u)=u-2B(u,v)/v=u-(uv+vu)/v=u-uv/v - vu/v= -vu/v$
wraithlord_kojima

Or in other words, $R_v(u)=-vuv^{-1}$
wraithlord_kojima

This is the reflection through a mirror right
yes I agree
Now witness as I reflect through TWO mirrors, to rotate around their intersection like I showed you earlier
This works for that too dont worry
Parallel mirrors intersect "at infinity"
Translations are rotations around an axis infinitely far away
It works out
thats so cursed
$R_v(R_u(w))=-v(-uwu^{-1})v^{-1}=vuwu^{-1}v^{-1}=(vu)w(vu)^{-1}=:R_{uv}(u)$
wraithlord_kojima

So this is a rotation,
$R_{uv}(x)=(vu)x(vu)^{-1}$
wraithlord_kojima

hmmmm I see
I mean i have no idea why that means to rotate
Yes you do
they'd just go up and down?
So we now took our math for reflecting, did it twice
the reflection of the reflection is a rotation
It is simple yes? Come come
What questions do you have
Or are you just fried for the second
wut
Yeah man, reflect twice and you rotate
i just dont know how to logically define this
.
reflection of reflection comes up in other areas as well, i hadn't seen this projection stuff before
Call it a bireflection
thats just a few lines and curves to me lmfao
Or 2-reflection
wait
I'm not sure what you meant by that exactly lol
like
we pass thru one mirror
and then we pass thru the other
yeah my shape doesnt make sense
but like
we reflect thru the first
and the reflection is reflected thru the second
isnt just one reflection a rotation?
nah
yeah im wrong
its two

two reflections always gives a rotation
I just dont get why
it may be helpful to draw arrows on those dots then
It's kinda definitional
Like two reflections can technically give things you wouldnt initially call a rotation
Like a lorentz boost
Or a translation
i mean doesnt that mean that R is reflected thru G and then Y is reflected thru Blue?
two circular relfects then ig
But we can use all the math for rotations, nearly, for them as well. So we call them rotations too
Sure, I intended the other order but you can read it in either direction
so if we leave it at the first step isnt it at least a half rotation?
No just a reflection
To cut the rotation in half, cut the angle of the mirrors in half
wait lemme as this a lil differently
does rotation mean exactly what springs to mind in a pleb like me?
Yes
HUHHH
Yes this is how you rotate things with GA
Which, BTW, includes quaternions!
qxq^-1!!!
I will never understand how one reflection isnt enough to rotate something
That's what your hand was meant to illustrate
i dont think I'd survive if i asked what this means again lol
If you only reflect once, its the wrong hand
yeah can you explain how to do it with my hands actually?
so, the two mirrors, i just imagine them without having to keep my arms in their place?
Look at the pictures on there
Sure
if I were in a room
with these two mirrors
and I stood exactly where our first vector is
and looked at the direction of it
would i see myself rotated?
The direction of what
idk the mirrors direction
If you look at the mirror, you see yourself standing where you would be after a reflection through the mirror
at any point except their intersection
well, its not just one mirror. my reflection would be reflected thru the other mirror too
IRL, you wouldnt be able to see this because the mirror is blocking your vision
But, the mirror you would theoretically see his reflection through the second mirror
but if the mirror doesnt block my vision then its not a mirror lullulululul
And this second reflection is a rotated you
alright and then
i would see myself looking back at me?
how would it work?
so weird
lemme see the photos
I saw some weird shit
which one is our thing?
btw disregard my previous theory
wait actually
i might understand now
so
say im looking straight at a mirror
but of course its not our normal mirror
so I look at myself looking back at me
and that i guess doesnt count as me having rotated yet
Fig 1, Fig 2, Fig 7 are the most relevant so far
alright
I'll let you digest all this, maybe another time I'll show you how to generalize this for any l-versor V and general multivector U
Essentially
yeah in a couple years
LMFAO
but with even one axis of symmetry we can rotate shit
No you can't?
brother i am still learning analytic geometry
Look at the circle, rotational symmetry implies infinite axes of symmetry
but ive heard the term being uttered before
Rotational axis is different
Although, it is an axis, and rotations are symmetries.... but not in the way you were clearly just using the terminology
Alternatively we add an "axis" of symmetry at the center of the circle?
so now we are strictly talking reflections
Yes so just reflections across lines, the usual elementary idea of axis of symmetry
so in the figs shown
we start from the right and end up on the right again correct?
Yeah, they're numbered and labeled so you can see the order of operations
ohhh didnt see that lol
hmmmm
something is clicking up there
i can see now why it wouldnt work with one mirror
So yeah, we get all of the symmetries of the infinite Euclidean plane out of this ordeal
how tf do we infer that?
We know how to reflect the mirrors, which is that basic idea of axis of symmetry, and the other symmetries are built out of these reflections (Cartan-Dieudonne Theorem)
this is so hardcore man
so
so
so
can you now
give me an example
where this knowledge is used?
because I honestly think I get it now
I feel like the whiplash guy
Hmmmm
What do you mean by an example of this knowledge being used exactly
Multiple ways I could interpret that
Applications tend to make just of some other facts I don't want to pull in too crazily... but I have an idea
I'm listening
oh god
This will let you sidestep not quite knowing some subtleties I do believe
It's a calculator
how does it work?
My recommendation is simple, you should draw a coordinate plane and some triangles and lines on it, try reflecting or rotating some around, with equations
It explains the syntax right there, you put in your equation and it gives you the answer
This way I dont have to talk you through the general notion of the geometric product
As you end up with entities that you haven't met yet as intermediaries in your calculations
It's like how the imaginary numbers show up in the cubic formula even when all roots are real
i feel like youre like 200 years older than me man
Once you do one or two you should have a feel for it, be convinced of it, and probably never want to do such things by hand again
literally
can i ask; what level of maths is this?
like what kinda background doth one need?
Uhhhh
Well I took a somewhat circuitous route in effort of a level of generality and rigor that most sources actually won't go for
youre a different kind of beast
There are introductions for high schoolers
NAHHHH
Much simpler than what we covered
As well as introductions assuming you know LA, or tensors
brother i struggle at deriving the ellipse equation and they doing reflections in high school?
Or introductions that teach the LA you need
LMFAOOO
no fr tho this is some nice stuff
ive never learnt anything advanced like this
obv idk what their use is
but who cares
thank you for sacrificing your precious time
No problem
ice been here 6 hrs now
Hey

While the projection formula for vectors is well-known, in geometric algebra, this formula works for any geometric object!
Discord: https://discord.gg/3Zj59zA2Rg
Patreon: https://www.patreon.com/sudgylacmoe
Patreon Supporters:
David Johnston
Jason Killian
jerrud
p11
Richard Penner
Rosario
trb
Check out these shorts bro
Lovely lovely stuff
alright alright thanks
yeatte ask your questions its my turn to sit and eat popcorn watching you fry your brain
huhhh
not fair
this was such a humbling experience man
anyways

In this short, I give a geometric explanation for a formula relating the inner product to the length of vectors. This formula can be useful theoretically, but it reveals some interesting geometric ideas as well.
Discord: https://discord.gg/3Zj59zA2Rg
Patreon: https://www.patreon.com/sudgylacmoe
Patreon Supporters:
Christoph Kovacs
David John...
Last one
In this short, I describe how to draw lines in PGA. I had to solve this problem myself when making the animations for the swift introduction to PGA, and I thought it was interesting enough to share here.
Discord: https://discord.gg/3Zj59zA2Rg
Patreon: https://www.patreon.com/sudgylacmoe
Patreon Supporters:
Christoph Kovacs
David Johnston
Jas...
What was the question
Ah I appreciate it
I was gonna ask about the spcifics of v^-1 and what this means specifically. and then i didn't quite look all the way up but
in the (uv+vu)/v, v is a vector or is it the magnitude?
mag right?
A vector
wait so someone very helpful told me Calculus involves algebra, functions, coordinate geometry, indices and logarithms, sequences and series, limits, trigonometry. im not good with sequences, series, i havent studied limits yet, and in trig i only know the 6 trig functions, and unit circle am i good guys?
the bottom one too?
Yeah, v^2=B(v,v)->v*(v/B(v,v))=1
so v^-1=v/B(v,v)
Yes
ahh ok ye, I dind't see that part hm
in sudgylacmoe vids I saw $e^{\frac{-I\theta}{2}}we^{\frac{I\theta}{2}}$, this is just another way of writing it yeah?
for rotation formula
Yeatte

Yes
That uses different parameters from my approach, but better ones arguably
However I didn't want to explain bivector exponentials
you said two reflection didn't give a hyperbolic rotation, is there some other object when applied twice that give hyperbolic rotation?


Next time we explain the above memes, heretofore referred to as Figure 1 and Figure A
it really is such a great meme
say
I want something like
$\partial _i \wedge \Psi_j$
that's valid, right?
Yeatte

 im looking to turn my 3 vector formulation of EM into a 4-vector one using geo vectors
im looking to turn my 3 vector formulation of EM into a 4-vector one using geo vectors
it just refers to the index of a vector with coefficients of partial operators
g radient


elecromanteteong ye
Curl does generalize yes
It's the same thing as the exterior derivative tbf
Divergence also generalizes
Same thing as the interior derivative (codifferential, not interior product)
interesting
ah so it is the same hm
I never got to post this when we were talking about reflections but
$r \circ r = r \ m \circ r = m \ r \circ m = m \ m \circ m = r$
I got this when figuring out symmetries of stuff
$\sum_{n=0}^{\infty}{n \choose -x}=\frac{\sin(x\pi)}{x\pi}\sum_{k=0}^{\infty}{\frac{k!x!}{(x+k)!}$ hm
$r \circ r = r \ m \circ r = m \ r \circ m = m \ m \circ m = r$
back to ginger

how do i get better at understanding word problems?
Wtf is that
Yeatte
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

ror = rmor = mrom = mmom = r
$r \circ r = r \ m \circ r = m \ r \circ m = m \ m \circ m = r$
Yeatte

composition of rotations and reflections(mirrors)
mom = r
correct
tho it's kinda a weird little thing I got with factorials 
oh interesting
why is mor = rom = m?
rotation + reflection = just reflection?
well, I just manually calculated a bunch of rotations and symmetries and thats what happeened
oh that is true i guess
cool
I think you can prove it by knowing r o r = r, and each operation unique (at least for nice cases), so r o m must not be any of the known symmetries, and all r are gotten to by r of r, r o m must get all the mirrors
I didn't account for something more general than a symmetry like a group, so this logic works fine for normal symmetries
Yes
Only in O(2)
$\sum_{n=0}^{\infty}{n \choose x}=\frac{\sin(x\pi)}{x\pi}\sum_{k=0}^{\infty}{ {{x-k} \choose {k}}^{-1}}$
Otherwise you get a trireflection
It's a reflection in the sense that a rotation is, though also improper (changes handedness)
Rotoreflections are the name
rightt
Yeatte

However it is a reflection in the sense of being an odd k-reflection
interesting!
Rotations generalize to the Even k-reflections, forming a subgroup
So all reflection is O(p,q,r), all Even reflections is SO(p,q,r)
now i'm not sure if i'm following :p
rotate o mirror = mirror, and rotate + mirror = rotoreflect in the generalization right?
Yes it's just addition of k
yes
i think
i know the groups corresponding to orthogonal matrices
do you know what it means
what an orthogonal map is
nevermind matrices, see if you can do it without saying something about matrix representations
If you're not sure, try out some of this problem set
i'm not sure
i was gonna say a linear transformation
Specifically 1, 2, 6, and 7
a real one that just "reorients axes"
an orthogonal map is one that preserves a (the) dot product
these are making sense, thank you 👍
yes
but i don't recognize the notation O/SO(p,q,r)
O is the Orthogonal Group, SO is the Special Orthogonal Group
specifically the ones preserving real symmetric bilinear forms of inertia p,q,r
the linear maps on R^p+q+r satisfying B(u,v)= B(Tu, Tv) where, given a """""nice""""" basis, B(v,v) is positive for p vectors, negative for q vectors, and 0 for r vectors
interestingg
this is the part i didn't know
you can also say it's the isometries of R^p,q,r onto itself
though strictly speaking, with r neq 0, I've only covered the weak orthogonal groups when talking about reflections
as the weak orthogonal group is the subgroup of the orthogonal group which leaves null vectors (B(v,v)=0) invariant, as opposed to doing whatever it wants with them like the definition here implies
yes you can
like say in minkowski space
O+(n,0,1)=E(n)
SO+(3,1) is the lorentz group yeah
SO+(3,1,1) is the poincare group!
SO+(3,1) is also the group containing special conformal transformations of the plane (or sphere ig)
that is interesting
the Orthogonal groups are quite an interesting family of Lie Groups
i'm not sure how to view the poincare group as a linear transformation, since it includes translations
I hate orthogonal groups ngl
many subfamilies as well. O(n,0,0)=O(0,n,0) for your Orthogonal Maps, O+(n,0,1), O(n+1,0,0) and O(n,1,0) can all do projective geometry
I hate number theory so we'll call it even
also looks like I need homology or number theory or some shit to finish my classification of metric vectorspaces wtf
is this something easily available? Does anyone know how to enumerate the isomorphism classes of metric vectorspaces over a Field?
O(n,1) and O(1,n) for spacetimes
O(p+1,q+1,r) for conformalization
I like Lie groups/algebras
Yup, once you go through these you get a good image about what orthogonal and unitary maps mean geometrically
orthogonal ones tend to mess it up
As opposed to just matrices
Why
What about the complex orthogonal maps dami
No love for O(n,C) huh
Tsk tsk tsk
HAH I don't think much about O(n,C)
tbh I'd have been stunlocked if you did
what class is this problem set from? :p
Analysis, but a very esoteric analysis class
i love esoteric classes
i love klasse orthogonal theory
$\sum_{n=0}^{\infty}{n \choose -x}=\frac{\sin(x\pi)}{x\pi}\sum_{k=0}^{\infty}{\frac{k!x!}{(x+k)!}$ hm
What?
Whats ᵽᵉ − ᵽᵉ − ᵽ = ᵽ(ᵉ − ᵼ) ᵉ + ᵽ + ᵽ = ᵽ + ᵽᵉ − ᵉ − ᵽ = ᵉ − ᵽ − ᵽ − ᵽᵉ + ᵽ = − ᵽᵉ + ᵽ - ᵽ + ᵽ = ᵉ + ᵽ - ᵽᵉ − ᵽᵉ − ᵽ = ᵽ(ᵉ − ᵼ) ᵉ + ᵽ + ᵽ = ᵽ - ᵽ
interesting
I thought I saw this appear in 5 different channels at the same time
My bad mods
Because I said that in them
It's 2?
Still don't do that homie
What is the answer
!help
To ask for mathematics help on this server, please open your own help channel or help thread. See #❓how-to-get-help for instructions.
But tbf this looks like gibberish
Wdym
??
are you answering my question with another question?
No
I just dont understand u question
What do u mean
How long does it tske average man for what
i mean say if a man is in mid 20s?
like around 24to 26 idk?
The chat reads like a stroke 😵💫

where can I discuss stuff on analytic number theory if I want to get insights? I'm working on a paper relating prime number sequences to roots of L functions using a method called spectroscopy where you construct a corresponding theta function (ie \theta(x)=\sum_{p_i\leq x} where p_i's have some property from the sequence) then finding the error term from that and taking the fourier transform, where the peaks correspond to the roots of L functions related to the sequence
maybe you could look in #advanced-number-theory ?