#linear-algebra
2 messages · Page 319 of 1
GOOD point, constant polynomials need not have zeroes
I am trying to derive the Fourier Transform from Fourier Series and I want to do it in a way that emphasize that the Fourier transform gives a function of frequency
so i attempted to derive an expression for the coefficient of the Fourier Series such that it can be turned into the Fourier transform
but I have been struggling for quite a few days
Find the line that:
• goes through the point (3,2,1)
• Is perpendicular to the line (x,y,z) = (1,2,3) + t(1,-1,2)
• Is parallel with the plane pi: 2x+2y+3z= 5
Is my drawing correct of what they are asking for?

Since w is parallel with the normal of pi and it is perpendicular with v
I know Im missing something stupid here, but if addition is not well defined in the projective plane P2, what operation are we using to define an automorphism of P2
like if we just take the normal matrix multiplication $m(e_{ij} \otimes e_{kl})=\delta_{jk}e_{il}$ how would we define its adjoint $m^$? so what would $m^(e_{ij})$ be?
thestonethatrolled

do you mean adjoint as in dual
with some identification of M_n(K) with its own dual (the two being isomorphic as vector spaces but not naturally so)
I mean its Hilbert space adjoint
do you have a definition handy?
so like we need $\innerproduct{m(e_{ij}\otimes{e_{kl}})}{e_{pq}}=\innerproduct{e_{ij}\otimes{e_{kl}}}{m^*(e_{pq})}$
thestonethatrolled

Hey guys can someone help me with this one?

I've somewhat got part a)
for part b) id guess that we use the fact that dim(im(b) \cap ker(a)) = 0 given rank(AB) = rank(B) but i dont know where to go from there
Hi, This is example 3 from Stephen, Friedberg, Arnold, Insel Linear Algebra
What do the square brackets mean and how do they differ from the round brackets?

they do not differ from round brackets here.
the only reason they are written here instead of round brackets is aesthetics
it's not just 'for looks'
You pair square bracket to square brackets
You can also use all (()), but then it becomes easier to get confused
Since clearly there is no marker to show which bracket pairs with which other bracket
i mean it is unambiguous
You can also interpret it as saying that $\mathcal{F}(S,F)$ which is the family of functions from $S$ into $F$ forms an equivalence relation where $[f(s)]$ is the equivalence class of functions equal to itself at each point. Then you can argue the author is saying an equivalence class can be operated on by scalar multiplication if we view it as scaling the function before evaluating at $s$. Similar stuff could be said for addition
engineersanonymous

f(s) is an element of F, so [f(s)] isn't going to be the kind of equivalence class you want. this is not at all what the author means, and it seem like a super clunky way to interpret the (in my opinion, already clear) author's notation
"scaling the function" is precisely what the author is defining here, so this is circular anyways
it doesn't make sense
@wintry steppe
Can someone provide me an intuitive (preferably geometrical) explanation to when given an orthonormal matrix, why does the transpose of that said matrix's columns are still orthonormal, when their elements are from separate (but I suppose mutual) vectors?
Stems from $A^{\top}A = AA^{\top} = I$. Algebraically it's easy to prove this, but on a visual level I can't wrap my head around it.
kura

I'd say the issue is not just orthonormal matrices, but inverse matrices in general that we have $A^{-1}A=AA^{-1}=I$, the rows of $A^{-1}$ dotted with the columns of $A$ give you either 1 or 0, and this is true even when you do it "backwards" which is surprising
Merosity

i dont really understand what negative determinant means
i tried making some graphs what i pulled out is that determinant is negative
if i hat is below the line formed by j hat
or j hat is above the line formed by i hat
is there another meaning?
or intuition
i watched a 3b1b video now and i undertsand now
wait so
would the determinant of the inverse of a matrix be the inverse of its determinant
lemme write what i mean

also det(kA) = k^2det(A)?
yup alright
Yeah this is correct
I believe this is only true for 2x2 matrices
thanks
oop yeah i forgot to specify im working with 2x2 matirces
For an nxn matrix, det(kA) = k^n * det(A)
Question about dot product:
I'm currently trying to adjust a vehicle path using line detection, and it goes a bit wonky (pic included). To get the average path deviation I'm currently averaging all lines, already a bad idea, and calculating angle between that vector and the heading (0, -1):
arccos( v_n . (0.0, -1.0) )
Path vector is p1 - p0 (light - dark red dot)
Heading has y = -1 because Y is positive down since it is pixel coords, but my assumption is that as long as we have identical direction between the vectors the inner angle will be calculated
However this doesn't seem like the right value for the angle, is my assumption not correct? I would expect a value of about 45deg here
In python, if it matters:
# lines is returned from cv2.HoughLinesP. It contains uint16 rows of [x_0, y_0, x_1, y_1]
x_0, y_0, x_1, y_1 = np.mean(lines[:,0], axis=0, dtype=np.uint16)
# Treat point with most pos y-value as the "bottom" point
# ... because of y axis being positive down.
if y_0 >= y_1:
p0 = np.int32((x_0, y_0))
p1 = np.int32((x_1, y_1))
else:
p0 = np.int32((x_1, y_1))
p1 = np.int32((x_0, y_0))
vec = p0 - p1
vec_n = vec / np.linalg.norm(vec)
# get the deviation angle between heading and averaged line:
head_line_deviation = np.arccos(np.clip(np.dot(vec_n, (0.0, -1.0)), -1.0, 1.0))

You shouldn't need the sqrt
Wait I'm rusty let me think more xd
Ok so $\vec{x} \cdot \vec{y} = |\vec{x}||\vec{y}|cos\theta$
hello2248

Oh yea! The sqrt is done for the norm, thanks, I'll correct that.
- But regardless, the norm is found inside
np.linalg.norm(vec)so the normalised vector in the code, should be alright, I think
$\theta = arccos(\frac{\vec{x}\cdot\vec{y}}{|\vec{x}||\vec{y}|}$
hello2248

Yea, but that's actually already done implicitly in the code.
You made me think if if the norm function perhaps did something else than the 2-norm by default, but it's correctly doing the 2-norm, getting the same normalised vector value through wolfram
And a quick wolfram again gives me an angle of 63deg, this baffles me a bit, probably code related, should ask somewhere python-related probably
I mean the triangle you have drawn looks like a 30-60-90 triangle to me if it's 2D
Ah you mean the angles? Yea, would've guessed 45 tbh, but python apparently wants it to be ~1 <.< Could be something weird going on with the data types
It's in radians probably
That would be pretty close tbh, but isn't theta directly related to deg?
Omg if it's that
I think you're right fuk me lol
This is why I wanna make video games and not important engineer stuff
Hahaha yeah I feel that
Anyway thanks mate. Saved me a nights headache haha
Yeah no problem gl with the code
Ty!

Yeah but I just can't visually wrap my head around it. Algebraically it's so obvious. But I don't understand why 
Ah, so a, b, c, d are known constants, and e, f, g, h are unknowns?
Then you just need to invert the abcd matrix and scale it appropriately so its determinant becomes 1. This is impossible if the original determinant was negative.
well see this is the problem
im using this equation
to derive how to invert a matrix
after a bit of math i found out that the inverse of matrix a b c d
is e f gh times 1/sqrt(det(abcd))
where efgh * abcd = [x,0,0,x] x is any real number
i might be totally wrong though
i just started linear algebra
Looks mostly right; I get $$\begin{pmatrix}e & f \ g & h\end{pmatrix} = \frac{1}{\sqrt{ad-bc}}\begin{pmatrix}d & -b \ -c & a\end{pmatrix}$$
Troposphere

damn i was actually right for once in my life
ok so in my equation the soltuion for efgh was d -b -c a
you used different meaning for efgh
i put efgh as equal to d -b -c a
and was going to find abcd inverse by multiplying efgh by 1/sqrt(det...))
but it same calculationd
alright
thanks!
I used the meaning of e,f,g,h here.
ahhhh ok
well thanks i understand now
And if ad-bc is not a perfect square, there'll be no solution where x is in Z.
wait that was my bad i somehow mixed up Z with R
this is the worst mistake i ever made
imma go cry now
Ah, never mind then :-)
alr, thanks for the help
Hi could anyone kindly explain what this solution is trying to say with the line in the red box?

I understand the part before that for A to have independent cols, Ax = 0 only when x = 0 since the nullspace of A only contains the 0 vector for A's col vectors to be independent
if A has dependent cols then a nonzero sol to Ax=0 exists, giving a nonzero sol to A^T*Ax=0
Is this statement true?

the transpose of an orthonormal matrix is orthonormal
yes
without writing out any entries, "A is orthonormal" means the same thing as "A^{-1} = A^T", and by taking the inverse of both sides you get what you want
On a more visual level, would saying the transpose of an orthonormal matrix A remains orthonormal because transpose insinuates simply a rotation, which would keep its perpendicular property?
it's a little imprecise, but sure
it feels like you could turn that into a precise argument
"orthonormal" means "rows and columns are orthonormal", and transposing only switches up the rows with the columns
wait would it still be orthonormal when u transpose or just orthogonal
So I've ran into an issue of diag(-1, 1, 1), would mean that it's not only just rotation to fit with the linear transformation (as det = -1), while still retaining its orthogonality. On a "linear transformation mindset" mindset I suppose, would there be any other situations of this? (besides rotaiton, and this case)
"orthogonal matrix" means the exact same thing as "orthonormal matrix"
oh I never knew that
I always thought it has something to do with unit vectors and orthogonal matrices
If it were not orthonormal, then it would probably break the rules of $A^{\top}A = AA^{\top} = I$
kura

Or ig the assumption
this is literally what it means for a matrix to be orthonormal/orthogonal, so of course it would
okay, read my initial message as if i interpreted "rotation" as literally rotating the matrix
i don't see what transposing matrices has to do with rotations in the linear transformation sense
An orthonormal matrix, as a linear transformation, would simply just be a rotation or reflection
I was asking if the transpose of said linear transformation, maintains its orthonormal traits because it's simply just a rotation (or a reflection, given that determinant is negative).
My issue with this topic is mostly my incapability to visualize these things. I get it algebraically but like yeah

An orthonormal matrix, as a linear transformation, would simply just be a rotation.
this is false and you gave a counterexample above
Ya
Oh wait
Yeah
Would there be any other counterexamples past rotation and reflection
In 3D those are the only possibillities.
Wait, no, that's a lie.
-I is orthogonal, but is neither a rotation nor a reflection in a plane.
in general if A is orthogonal there exists a set of coordinate axes where for some axes A does nothing, for some A reflects, and for some axis pairs A rotates by some angle
You guys are life saviors. Thank you for the help ❤️
Hii Guys
Need some help with vector spaces
We know that C over C is vector space
But what will be the multiplication operation?
@wintry steppe a scaling b is defined as the product of a,b when considered as complex numbers
in general this is how scaling is defined when considering a field as a vector space over itself
meitar5674
Compile Error! Click the  reaction for more information.
reaction for more information.
(You may edit your message to recompile.)

anyone knows how to get the span out of this one? W={p(x) /into R_3[X] | p(0) = P(1)}
what's R_3[x]? by any chance do you mean polynomials of degree at most 3 over lR?
@silent aspen
Yes
you don't you pick a general form a+bx+cx²+dx³?
kura

$A \neq A^{-1}$
This isn't always true
^
show that its determinant is not equal to 1 or -1, that would mean it can't have its power the identity
Probably with determinants
that's a shame lol

Merosity

This is necessary but not sufficient for what you want
any matrix with $A=A^-1$ satisfies $A^2=I$, so to make a bunch of examples, any kind of permutation matrix that permutes pairs of things would work. More trivially just -I works too
Merosity

Maybe you could share it
It might be possible to guess A^n in general then prove it by induction
why are they too advanced
you can still use them just be more verbose about it
teach them eigenvalues haha
you odn't have to take the trace
the eigenvalues of I are 1, so you'd need L1^n=1 and L2^n=1
you can demonstrate it with an eigenvector directly, multiply the matrix by it and show that the vector scales
and since it's an eigenvector the multiplication will just continue to scale it, so it will never be the identity
sort of, it's necessary but I don't know if it's sufficient
you're welcome
can somebody help me understand this part of the proof:
To show that $U \cap W = {0}$, suppose $v \in U \cap W$, then there exists scalars...


I kinda see why it can make sense but I also don't see it
texaspb :rainbow:

remember what the basis of U and the definition of W are
strictly speaking $U$ is not a subspace of $U\oplus W$ but rather $U' = {(\bf{u},\bf{0}_W): \bf{u} \in U}$ is a subspace of $U\oplus W$. is this correct?
giannis_money

correct

you pinged me out of nowhere for a question that belongs in #precalculus and not here, so i won't help
my bad
I just read your role and it says honorable
So I assumed you were really smart
This question has been eating me alive for the past hour so just looking for some help
Can you help me
I'm sorry

yep
How valid is this?

No, you are essentially assuming the conclusion in saying B and B^-1 'cancel out' - playing around with it like this without actually using the definition of trace isn't really a viable strategy
(Moreover, B needn't be invertible)
You'll want to actually write what tr(AB) is in terms of the entries of A and B, or something similar
I don't understand how to do this. I watched the lecture and didn't grasp the concept.

Would I multiply T(e_1) by (1,0) and T(e_2) by (0,1)
I don't know if I did that right xD

I was looking at the video and I guess this is how I would do it. not sure if it's correct tho
Oh that was correct 🤣
there is no "vector multiplication" going on
how did your lecture define "standard matrix"?
you should copy that
your final answer should be a 2 x 2 matrix, not a vector
It would be (2,0,0,4) right? I was asked for the first entry for row one and the second entry for row two.
that matrix is not correct. if you're asked for those entries specifically (which you're not), then you would be correct that they are 2 and 4, respectively
It's not this?

it is not
Is it flipped?
no
Like (0,2,4,0)
if you didn't grasp the concept from your lecture, you should rewatch your lecture instead of trying random things
or google "standard matrix of linear transformation" and learn what it is
I plan to do that later but right now I just need to complete my homework.
Which I already got the answer right for that question.
that is definitely not the right answer lol

thank you for now posting the full problem
I just did what he did in the lecture lol
whatever you did isn't correct, so that's probably not what your lecturer did
but you got the right answer so 
if you're actually asked to compute the entire matrix instead of just some of its entries, you're going to have to learn what the standard matrix actually is
Well he did something different in the lecture but I followed the steps for this problem kind of and end up getting it right xD
I plan to actually fully understand the concepts later whenever I'm not pressured on deadlines. It's important for me to get it all and understand it.
But I'm just trying to do my homework.
So I'm getting my grade so I don't have time to just research it all right now. Once my homework is complete though I definitely gonna watch some khan academy videos
Since he explain stuff well
Geometric Question: If eigenvectors are meant to write an operator $A$ in terms of one basis as $Ax=\lambda x$, then supposing we have a full rank Eigenbasis, did we essentially linearize the operator $A$ in terms of new axes so that nonlinear things like rotation etc can be expressed as scaling?
engineersanonymous

rotation is a linear operation. but yes in the new basis we can now apply the operator just by scaling the new axes
Hey guys, some Jordan form related question -
Minimal polynomial - gives each of the eigenvalues Jordan max size.
Ker(T-idV) - how many Jordan blocks for each eigenvalue ?
Is this right? I might be using the wrong terms, no idea about the translation, sorry about that
should be dim ker(T-cI)
where c is a scalar?
an eigenvalue
Any scalar works, if the scalar is not an eigenvalues then dim ker (T-cI) is 0.
Could anyone help me with this?

let's go in DM
why do they note matrix combinations AB when they first do the B transformation and then A transformation
It's the same as with functions in general, doubt there's any good reason outside history
Arabic style
wdym the same as functions
where in functions do they right to left
but ig I'll just have to accept it
and wiggle my brain around reading reverse
@ripe compass f(g(x)) means applying g, then f
ABx means applying B, then A
same thing
for matrices it also works way better with the normal matrix multiplication when you want to apply them. when you apply AB to a vector x you first multiply y=Bx and then multiply Ay. so (AB)x=A(Bx)
compare that to AB meaning A first, so (AB)x=B(Ax)
thanks that helps
If you do a quick sketch, it is possible to work out the vectors explicitly in coordinates
Or equivalently to find the angle between them
ok i will try thanks
but is my friends says right?
I will learn about how to make angle x axis and y axis
thanks anyway see ya
Yeah 50 root 2 seems correct

What was your working? I'm a bit confused where that's from
You can just write down the formula for the determinant and put absolute values about it
Well yes but I tried like solving for the area of the parallelogram (aka absolute value of determinant) by using vector lengths and fit products, wait I’ll send my reasoning
Many many thanks
np


I'd try to expand that out and see if I could factor it into a perfect square - specifically you can expand (ad-bc)^2 and compare to it to save yourself the misery of trying to factor
Imma see what it’d give for a=d=1 and b=c=0
I just did b=c=0 leaving a,d unchanged and it gets you |ad| like you'd expect, so that's a good sign
Ah ok
So good so far
Imma try expanding the inside of the sqrt to see what I get
Imma simplify now
Hmm I don’t think it works when b and c are not 0 but I’m not quite sure
what does an overdetermined system (most likely to have no solutions) says in regards to linear (in)dependency
does that mean it's linearly independent?
bc like either way I could choose coefficients equal 0 and it would be fine
ok
that should be obvious
of course it's LI
Well needn't be linearly independent ig
well you could for example repeat a column multiple times and still get an overdetermined system
yeah. so ?
it's always LI
if I put two columns of length 50 next to each other
also I'm responding to potato
then I have 50 equations and 2 unknowns. and the columns are linearly dependent
I meant what are you referring to as "linearly independent"
But ye
paint skills ftw
oh
hm
wait a minute
ok
but assume I'm choosing different coefficients for each vector
then if I have more equations than unknowns, this set of vectors is linearly independent
?
maybe that was written poorly
you just give the example
if you chose linearly independent columns then they are linearly independent, yes
$S = {(4, -1, 2), (-4,10,2)}$
texaspb :rainbow:

show that they are linearly dependent (or not)
linearly dependent means that there is a nontrivial choice of coefficients a1, a1 such that
a1v1 + a2v2 = 0
correct?
yes
ok then having the vectors be column vectors
it'd look something like this \
$a_{1}\begin{pmatrix} 4 \ -1 \ 2\end{pmatrix} + a_{2}\begin{pmatrix} -4 \ 10 \ 2\end{pmatrix} = \begin{pmatrix} 0 \ 0 \ 0\end{pmatrix}$
right?
texaspb :rainbow:

yes
then I'll have more equations than unknowns
so in this case
where every coefficient is different
I will always have a linearly independent set of vectors?
no
every coefficient being different is not enough
whoops wrong pic
so every coefficient is different. but clearly the columns are linearly dependent
in my example here
I came to the conclusion that the only choice for a_1 and a_2 that makes the expression equal 0 is if they are both equal 0 too
just solving the system
the thing is I was tryign to find a way to tell if it's linearly independent or not by just looking
yeah that's pretty hard
best way to check for linear independence is to solve the system

Sorry but not a lot people can’t tell what you need help with if you just post a screenshot with no context.
That's because I procrastinate at even writing a simple message. Duh.
Anyways....
Oh I didn’t know sorry.
No probs.
I still don't get the $X(tX - I_2) = t(tX - I_2) - X$ part.
Jonathan Phan

Good people? A little help?
aint this just elementary matrix algebra
wait, hold on
ah yes
$X^2 = tX - I$, so $X(tX - I) = tX^2 - X = t(tX - I) - X$
Ann

"Ooooooohhhhhhhhh... I'm a fuckin' idiot!"
- Loud green-haired Irish man, c.2013
So is anyone else doing Titu Andresscu's Elementary Linear Algebra: A Problem-Solving Approach?
Please check if I did the following exercises correctly.






Haven't figured out 3c, though.
latex your solutions if you want anyone to read them (at the very least, write them out cleanly and take clear, focused pictures)
it's also not clear what page of working corresponds to what problem
you also posted four problems at once. one at a time
what should I imagine with a linear image?
in my book it says "an image f: V->W is called a linear image if the addition and scalar multiplication is preserved. With this we mean f(u+v) = f(u) + f(v) and f(lamda * v) = lambda*f(v) for every u, v an element of V and all lambda an element of R"
I do not know what to imagine with this
is it called image or is that the word you chose to translate it as?
yea litteral translation
generally it's called linear mapping or linear transformation or linear function or stuff like that

what language are you translating from
dutch
and what's the word in dutch?
afbeelding
there is a video by 3b1b that gives some nice intuition about what linear maps are. check out his playlist about linear algebra. or just check out his channel in general
ah function or map then Ruffy
what's the title
I can't find any with linear maps in teh title
he may have called it linear transformations. or maybe matrices. or linear functions. don't remember. don't wanna look it up
yeah he called it linear transformations
but it looks like an interesting series guess I'll check it all out before starting to actually study
Anyone have an idea to prove that the sum is direct?

i do, by appealing to the definition of "direct sum"
you probably want to use the second condition on the operators to show this, given that you (hopefully) used the first to show that there is a sum in the first place
i've already shown that this is a sum
i can't quite get to them having pairwise intersection 0
i think the idea is to somehow use $\pi_i\pi_j=0$ for $i\neq j$
monkeman

so i get $\text{im}(\pi_j)\subseteq \ker(\pi_i),$
monkeman

@wintry steppe i don't know how exactly to go further
i can apply this to show that $\text{im}(\pi_i)\cap \text{im}(\pi_j)\subseteq \text{im}(\pi_i)\cap \ker(\pi_i)$
monkeman

but thats about it
hmm
ignore what i deleted
the thing i was worried about was not a missing assumption, but follows from the ones you had
@real bone you should now try to show that im(\pi_i) \cap \ker(\pi_i) vanishes. to do this, try to show that \pi_i is a projection
you will have to use the \pi_i \pi_j = 0 condition and the \pi_1 + ... + \pi_k = id condition, somehow
hint: ||apply the first to the second||
thank god texit let me delete that
in the old days i would have used my message delete privileges
Isnt this already enough to argue that the images are disjoint
If the whole Image of some pi_i is contained in the kernels of all other p_j for j neq i then the intersection of that image with the images of pi_j can only be 0
And the intersections being 0 is whats missing for the sum to be direct
or am i missing some elementary fact here
elaborate on why this follows

ah wait lol now i see it how you get the projection property and then the statement
took me longer than it should have
same
I don't think it actually does vanish right? Like there might be some v!=0 in the image that maps to 0 and therefore in the kernel
\pi_i being a projection guarantees that this vanishes
for if v = \pi_i(w) is in the kernel of \pi_i, then 0 = \pi_i(v) = \pi_i^2(w) = \pi_i(w) = v
so now you must show that \pi_i^2 = \pi_i
Why can we conclude the red line from the preceding statement?

Wait so how would I go about proving it is a projection
follow the hint i wrote
.
the two conditions together give you what you want
For the (->) direction: Take B an ordered basis for F_n. Then [L_A]_B = A which is diagonalizable. So L_A is diagonalizable

not just any B will work
you need to pick a specific B that makes [L_A]_B = A
but once you have done that, your argument works
and really, once you have [L_A]_B = A, the corollary follows immediately from what you just posted
hum
guys quick question
what is the dimension of a polynomial vector space
like for example P_2
will it be 3 or 2
the dimension
for the polynomials of the form $a_0 + a_1x + a_2x^{2}$
texaspb :rainbow:

what do you think it should be?
write down a basis of P_2 and tell me how many elements it has
there you go
I was just confusing with the degree of it ig
P_n will always have dimension n + 1, since you need to account for the constant term
can i ask someone to check my proof ? im not sure about the highlighted part, whether its a valid argument or not

yup that's valid
Yup nice
ok, thank you!
TTerra, regarding the base for F^n. It needs to be B = ((1,0,..,0), (0,1,0,...,0),...,(0,0,...,0,1))
Then L_A(e1) = A for every element in the base
no
I mean, we will get the ith column for each action on the base
this is correct (you could just say "standard basis")
oh ok nice, thanks!
btw, for the other side of this proof, can i just say that since U1 is contained in U2, their union is just equal to U2, which is a subspace so we're already done? (instead of taking the union and proving the properties of a subspace one by one the long way?)
lets say i have T,S: V -> V such that ker(T)=im(S). how do i construct S in terms of T?
TS=0 right?
hmm
hmm

hint/suggestion: ||T(T - id)(T + id) = 0||
yeah but am i not trying to find pi_1,pi_2,pi_3 such that im(pi_1)=ker(T)
im(pi_2)=ker(T-id)
and im(pi_3)=ker(T+id)?
because V_0=ker(T), V_1=ker(T-id) and V_2=ker(T+id)
@wintry steppe am i missing something here? because thats what it seems to imply
OOOOH
IM TROLLING
i'm so sorry
i legit didn't get ur hint for a hot second
wait no
hmm
project onto ker(T)
few ways to do this. easiest is to pick a basis of ker T, extend to a basis of V, and chop off the components coming from the basis elements not in ker T
or pick an inner product and do orthogonal projection (admittedly, same as previous method with orthonormal bases)
wait so i'm assuming ur hint implied that the construction is something like pi_1=(T-id)(T+id)
pi_2=T(T+id)
and pi_3=T(T-id)
?
it was just an observation that could be useful
what exactly does this
R^m and R^n mean?
doesnt that mean R is a vector of size m and n respectivly?
yes
ok, thanks
like there are m columns
since 1 column = a vector
well at least the trashy way im explaninng
"R^n" means the set of vectors with n entries, each from R
$$\bR^n = {(x_1, \dots, x_n) : x_i \in \bR \text{ for each } i = 1, \dots, n}$$
TTerra

curly brackets are non-standard notation for vectors
oh oops
ok just ignore my clumsy latexing
it is. R^n is a set of vectors just as i wrote
it's a vector space, so you can speak of a linear transformation defined on it or to it
can you explain this in simpiler terms, im still wrapping my head around all this
but a vector of R^n is one that's cartesian product of n real numbers
that's exactly what i wrote
the "it's a vector space" part or "linear transformation..." part?
like a vector in $\mathbb{R}^2$ might be $(1, \pi)$
got it
i am choosing not to distinguish between row and column vectors
_gmz


i ask because im trying to wrap this around my head, but i dont think im grasping it correctly
if it perserves length, that means dot produt is same
so the kernel is the same from Rm to Rn?
what do you think the kernel of such a linear transformation is?
i will phrase my question to you precisely: "if L: R^m -> R^n is length preserving, what do you think ker(L) is?"
hmm
think about it a bit
if a vector x in R^m satisfies L(x) = 0, see if you can use the "length preserving" assumption to infer anything about x
to clarify: this does not mean that for all x, L(x) = 0
that's true, i need to be more precise with people like this
@rapid ivy it's just that if the language isn't precise, it's hard to tell what the other person is saying
i have edited it for more precision
i'm sure they didn't mean it in a patronizing manner
i didn't mean it in a patronizing way, but i can see how it came off that way
if you can't figure it out in general, try finding some specific examples of length preserving linear transformations. compute their kernels, and see if you can make a guess for the general situation
it's always good to work with examples, and only then go to the theory, when you're stuck proving something general
R^2 -> R^2 captures the essence of the problem already
("like this" meant to refer to _gmz's message, not to belittle in any way. i apologize if it came off that way)
jesus christ, i dont even know where to start
I think i can use the trasnpose is = the inverse
this is where you can start, then

do you have a geometric idea of what linear transformations from R^2 -> R^2 look like?
like a rotation or flip across a line
ok
ok @wintry steppe for my problem can i write $\pi_1=1-T^2,$ $\pi_2=\frac{1}{2} T^2- \frac{1}{2}T$ and $\pi_3=\frac{1}{2} T^2+\frac{1}{2}T$?
the problem is i only get $\text{im}(\pi_1)\subseteq \ker(T)$ for example
monkeman

their sum isn't the identity map
monkeman

now the sum is identity map
their sum is the identity and the pairwise products are zero, so you can apply part (a)
i said you can apply part (a), i didn't say it's the application of part (a) you need
that's something you'll have to check

It's a nice problem tho
@rapid ivy Preserves length means $|Lx| = |x|$ for all $x \in \mathbb{R}^m$. It is a theorem that this implies $(Lx, Ly) = (x, y)$ for all $x, y \in \mathbb{R}^m$.
IlIIllIIIlllIIIIllll

are those intended to be angle brackets?
the () mean dot product
A^T A = I ?
strange notation imo
A^TA = I is equivalent to (Ax, Ay) = (x, y) for all x, y
because V × V, defined correctly, is also a vector space
so that means it orthogonal
yes. The equivalence between length preserving and orthogonal is a theorem
wait, so what step would i take after that once i recognize this?
im not seeing what this changes
it's common enough and shouldn't cause confusion

i learned what orthogonal matrices, but im unsure how i can see its kernel from that?
especially when its jut like R^m and R^n
my brain is truly pea
suppose that x is in the kernel of A, which means that Ax = 0. can you use any properties of A to say anything about x?
🥲
that everything would map to 0?
wait
not necessarily
im assuming that x is some vector which gets mapped to zero, im not saying that every vector gets mapped to zero
i don't know what that means
wait
i want to know what the equation Ax = 0 would imply about x, if it were true for a given vector x
assume that x is some vector which A maps to zero (Ax = 0). what do you get to infer about x?
you must use the fact that A is length preserving at this step (or orthogonal)
YES
🤯
exactly
😹
im such an idiot
so just to clarify, with this question i should recognize that since orthogonal == length perserving, the only possible kernel is one where a vector maps to 0?
so im struggling to see how the idea of A^T A == (Ax,Ay) = (x,y) is useful in this case?
maybe im misunderstanding what this means?
id rephrase that a little. instead of "orthogonal = length preserving" (which is true, but unnecessary), i just want to see how "length preserving" implies ker A = {0}
orthogonality comes later in the problem
(when you're asked to look at AA^T)
thank you
question, how would i find a transformation matrix for something like R^2 -> R^3
google how to write a matrix of a linear map between finite dimension spaces (it requires a choice of basis of each space)
Hi for this qn, my answer to a subspace S for V2 is : A line that lies in V2 which passes through the origin.


I'm wondering why the solution provided does not need to explicitly say that the line passes through the origin, and able to immediately point out that (0, 0, 0) is in the line through (1, -1, 1)?
it's implied by the word "subspace" that it passes through the origin
the only line through a given point which is also a subspace is the one through that point and the origin
if you allow any line through your point, then you
- will not have a subspace unless you pass through the origin
- will have infinitely many lines; a unique one through each other point
it's just bad writing
hi how tf do i get a vandermonde determinant
i have a 5x5 matrix and the number im getting is super large

by using the formula for the determinant of a vandermonde matrix
in your example, the determinant you want should not be too large
i tried a calculator and im getting like 288
but when i wrote it out

which is a very large number
so im so confused
20321280 is a little larger than 288
you're using the formula incorrectly
it should look like (5 - 4)(5 - 3)(5 - 2)(5 - 1) and so on
the determinant of this guy is $$\prod_{1 \leq i < j \leq n}(x_j - x_i),$$ and for your example, $n = 5$ and $x_1 = 1, x_2 = 2, x_3 = 3, x_4 = 4, x_5 = 5$

TTerra

not quite following
(technically your matrix is the transpose of the one i've copypasted here, but that doesnt change the determinant)
yes
i thought it was by row?
you're probably interpreting the formula incorrectly
the matrix you posted is a "column vandermonde" matrix, so to speak
transpose it to get a "row vandermonde" matrix, a matrix of the form i posted above
then you can apply the formula i wrote
wait youre supposed to transpose first?
🤯
also 1 row is going directly down right?
or am i switching the naming
oof
maybe i should rephrase
what is your definition of a vandermonde matrix, and what is your formula for its determinant?
just in case we're thinking of different things
Hi I don't want to interrupt but I can't tell if you guys are done so i'll just post it
just posting it would be interrupting, but i don't particularly care
they seem to have disappeared, so go ahead
So I'm trying to learn about the pentagram map
but first i'm just trying to check if its a linear transformation
So i've started by trying to define a matrix equation by the intersection of the lines passing through every other vertex
and I know that every matrix defines a linear transformation
but does it follow that this matrix equation particularly defines a mapping from the point where the line originates to the intersection
I'm kind of confused
and I don't know how to go about looking at it other than this way
Everything I've found looks at it as a projective transformation
is that the same in this specific context?
And if it is then should i be looking at different matrices because it really feels that i should be
the pentagram map?
so like
If you have a pentagon
and you connect all the vertices
the pentagon in the center is created by the intersections
and if you map the vertices from the outside one to the inside one
I mean it should be a linear transformation
I just have no idea on how to show that it is
Nvm I think you need more than lin alg for this lmfao
Can someone describe to me what a 3x3 matrix transform is. I need to transform some data I have, but literally know nothing about matrix transforms. Can it be explained in layman's terms please?
a 3x3 matrix transform is a certain type of "well-behaved" function that maps ordered triplets to ordered triplets
These values will apparently how me transform one color metric to another.

The values I have are the following
Red: 0.4686329572
by "ordered triplets" i mean lists of numbers of the form (a, b, c)
it probably just wants you to do matrix multiplication then?
Yeah i'm not sure
It just says these values will help me transform my units to a different color metric.
,w {{0.9806, -0.0348, -0.0073}, {0.0065, 1.1191, -0.0601}, {-0.0132, 0.0017, 1.0297}} * {{0.4686329572}, {0.4921898868}, {0.4709272159}}

Did you multiple the sum for each dimension per channel
being Red = SUM(0.9806, -0.0348, -0.0073) * 0.4686329572
not quite

so for computing the first entry
,calc (0.9806 * 0.4686329572) + (-0.0384 * 0.4921898868) + (-0.0073 * 0.4709272159)
Result:
0.43720361750113
the second entry uses coefficients from the second row of the 3x3 matrix instead of the first row
the idea is that this "weights" each parameter
the first entry (red) of the final vector is based on a "weighted sum" of the entries of the input vector
you'll note that the red entry has the highest weight
0.9806
because presumably "red" in your different colour metrics looks fairly similar
the blue and green values have very low weights relative to red's
-0.0384 and -0.0073
Oh, so you're basically going Transformed Red = (0.9806 * Red value) + (-0.0384 * Green value) + (-0.0073 * Blue value)
so red's weight ends up contributing "the most" to the final sum
yes.
the second row represents the weighting for computing the green value, and the third row represents the weighting for computing the blue value
same process, but now instead of red having the largest number, it's green or blue (respectively)
it's presumably just a matter of different standards of what colours are associated with what numeric values
Interesting okay
Specifically this is to transform density metrics
optical density
this is just my assumption off of little context though, but it's the only thing i can see really making sense
and it produces sensible results
Is this the same thing as a linear transform?
yes
matrix multiplication is notation for representing linear transformations
(between finite dimensional vector spaces, blah blah blah a bunch of asterisks that dont matter)
I see, yeah I know they stated it was for a linear transform so you're probably on the money with it
I appreciate your help man, thank you
Thank you for the detailed expln. Will my answer that: A line that lies in V2 which passes through the origin being a subspace S of v2 suffice then? Since any combination of vectors in that line will still lie in V2 ?

The eigenvalues of A are the sol'ns of the eq'n $t^2 - 2\cos(x) + \cos(x)^2$. How do I continue?
Jonathan Phan

i think you forgot some things in the equation
i think maybe you meant t^2 - 2cos(x)t + cos^2(x) = 0?
any set of vectors that is linearly independent on R^n is a basis for R^n?
saw a guy say this in a stack overflow post
is it true?
yes
not any set, the set has to have n elements
I nearly did too
a set of n vectors which are lin indep span Rn
cool
assuming vec space defined over R
idk if this applies for inf dim vec spaces tho
well i guess not cos we cant really say n vectors lol
If i make a line with x = y*m + b, so that the intercept bis in the x-axis, and the slope m = (x1 - x0)/(y1 -y0) should the slope then not be equal to the angle between the vector (x1 - x0, y1 - y0) (green line) and a vector (0,1) (red line)?

I'm asking since I get some decimals off, but too much to be floating point precision
then it would only be possible to have slopes between -pi/2 and pi/2
does that seem reasonable?
or -90 and 90 degrees if you prefer that
Well the slop can still be negative in value, that would allow it to be full radians, right?
slope*
Ah, I see what you mean, the slope could be any number?
But isn't it always a ratio
Ooh no
It's not rip
Right! Okay, so arctan(m) gives me theta
Ah yes. Thanks for the correction.
So we just solve this thing normally, right?
yes
you should probably notice that this has a very nice form
before just blindly applying the quadratic formula
Hii guys
When they say "eigenvalues with multiplicity" generally this is algebraic multiplicity right ?

Sth like so

Also for this one
I can understand that we should have blocks of matrix on the diagonal
But I dunno how we get the following result
teacher says the answer is -1 but I think it doesn't have any limit
because the limit of floor(sin(3π/2)) + ε is 0 and there is no limit for sin(3π/2) - ε (as sin is never less than -1) so the right and the left limit differ from eachother so it doesn't have limit
which is the correct answer?

this isn't linear algebra, go to #real-complex-analysis
while doing matrix elimination(like making upper trangular/lower trangular matrix), I mostly gets worst case scenario.. Can someone suggest me a proper way to do elimination.


having issues with part d
if i’m understanding this correctly, all this matrix ‘P’ does is take the coordinate vector (a1, a2, a3) with respect to the ordered basis a to its equivalent coordinate vector with respect to the ordered basis a’
but like, X’ is apparently the coordinate matrix relative to a’? so wouldn’t X = PX’ mean that we are going from a’ to a?
i just don’t really understand how this works (textbook is hoffman & kunze btw)

variables dont matter, all its saying is that the first two coordinates are the same
its important to read the form not the exact letters used
is there any reason why we compute the eigenvalues with det(A-xI) = 0 and the polynomial characteristic is defined as det(xI - A) ?
Is it just because det(xI - A) makes the principal coefficient positive?
det(A-xI) & det(xI-A) are off by a factor of (-1)^n
so u can actually define the charpoly as either one
hence use either to find eigenvalues
if u like monic polynomials then u can use det(xI-A)
indeed
can two different bases of a vectorspace have the same linear combination for a vector?
sure, the zero vector looks the same in every basis of a vector space
and except de zero vector?
sure, if the two bases share a vector, that vector is gonna look the same in each
you can write it as an equation B_1 v = B_2 v and this means (B_1 - B_2)v = 0 so either v=0 or the columns of B_1-B_2 are linearly dependent
How can i prove that for a given n×n matrix we can find a linear map f wherfore this given matrix is the matrix representation of this map f, that is dependant on the basis we chose, or in other words why isn't it enough if i have a given matrix to find only one unique linear map?
I am sorry for my english, it is not my native language
if $A$ is an $n \times n$ matrix and $\beta = (v_1,\dots,v_n)$ is an ordered basis of a vector space $V$, then you can define a map $L_{A, \beta}\colon V \to V$ by mapping $V$ isomorphically to $F^n$ using $\beta$, performing matrix multiplication, and then going back to $V$ using the first map's inverse.
TTerra

what does the T_v_k stuff mean here? the notation here seems confusing

in more precise terms, using the notation of the previous post, let $\varphi\colon V \to F^n$ be the map $$\varphi(a_1v_1 + \cdots + a_nv_n) = (a_1, \dots, a_n), \qquad a_1,\dots,a_n\in F.$$ this is an isomorphism. set $$L_{A, \beta}(v) = \varphi^{-1}(A \cdot \varphi(v)), \qquad v \in V.,$$ where $A \cdot \varphi(v)$ is ordinary matrix multiplication. with respect to the basis $\beta$, the linear map $L_{A, \beta}$ has matrix representation exactly what you'd expect: $[L_{A, \beta}]_\beta = A$.
that's how to precisely construct it
on to the second part of the question, if you pick a different basis, the map \varphi is gonna change
(i probably should have used some notation that emphasizes that \varphi depends on the choice of basis, but whatever)
it should become clear if you think about this construction a little bit that picking a different basis will (in general) give you a different linear map
Tv_k means T applied to v_k
right
so A_1, k is just the row vector of the matrix A that the v1 basis vector is multiplied by in the linear transformation?
so it’s the scalar that’s multiplied by the v1 basis vector?
sure
is there a better way to describe it…
i think that the way that the author's described it here is already pretty clear
maybe i can elaborate on it
yea i’d appreciate it
Thx for the answer
$Tv_k$ is an element of $V$, so it's going to be a linear combination of $v_1,\dots,v_n$, i.e., there are unique scalars $A_{1,k},\dots,A_{n,k}$ such that $$Tv_k = A_{1,k}v_1 + \cdots + A_{n,k}v_n.$$ that's how they're defined
TTerra

I just join this server and when I saw the ''linear algebra'' I was hype. But, can someone tell me : how can we find RREF (reduced row echelon form).
my latex vanished 
in more precise terms, using the notation of the previous post, let $\varphi\colon V \to F^n$ be the map $$\varphi(a_1v_1 + \cdots + a_nv_n) = (a_1, \dots, a_n), \qquad a_1,\dots,a_n\in F.$$ this is an isomorphism. set $$L_{A, \beta}(v) = \varphi^{-1}(A \cdot \varphi(v)), \qquad v \in V.,$$ where $A \cdot \varphi(v)$ is ordinary matrix multiplication. with respect to the basis $\beta$, the linear map $L_{A, \beta}$ has matrix representation exactly what you'd expect: $[L_{A, \beta}]_\beta = A$.
TTerra

@polar marsh this disappeared for some reason, i might have accidentally deleted it
putting it back up if you need to look
i don't think anyone wants to walk through the steps of gaussian elimination
Ok
i see this, gonna try and understand it - ty!
it's not that complicated
all that's happening is "vectors in V get representations in the basis"
and by the way, to find the Null space of matrix, do we need to make, in a way or another, a substraction ?
Someone can correct me if I'm wrong, but I think solving the homogeneous system AX=0 of matrix A should give you its Null space. That is, reducing the augmented matrix A|0 to RREF to solve.
you're correct
you are definitionally correct
ofc you don't need to reduce to rref to know null space, but that is a way
You also don't need to consider an augmented matrix. Just rref
Row operations preserve the kernel
ofc for Ax = 0 the augmented part of the augmented matrix doesn't matter anyways

the highlighted paragraph?
Do they mean if i chose the same basis for in input as output? Because if not, then i can choose a linear map that takes b_i as an input with (b_1...b_n) a basis in V and then an out put c_i from another basis (c1.... cn) without having the identity function
Yes
yes, they mean the same basis for input and output
Oh okay
the identity is a map from R^n to itself after all
So this would mean that if i have the identity matrix , i don't necessarily have the identity function
?
No the same
so from a vector space to itself
Yes
why'd you say "between two vector spaces" then...
but anyway
UNLESS STATED OTHERWISE, the input basis and output basis are understood to be the same
Yes i get this so thats why i asked if i would choose two different bases in V i would have another linear map
My question was that if i give you the identity matrix as a representation of a linear map f, then f isn't necessarily the identity function since i can chose two different bases in V.
Okay thank you
Applied linear algebra: The decoupling principle Anybody familiar with the book? Will i be fine with just a basic linear algebra course before attempting this book?
Anyone got a good problem sheet of questions where you factorise matrices? Such as $X_1(X_1-X_2)+(X_1-X_2)X_2$ is competing the square
Max..


This one hurt my brain to calculate its eigenvalues. I know that it's a rotation, but a rotation of what?
I suppose in the eigenbasis you can think of it as a rotation in the complex plane in the components by x radians, idk that's sort of like 4 dimensional to think about

can i get some help on 2 and 3b?
i was able to prove the reverse implication for 3b but i can't actually solve the problem
for 2 first find any basis oh H. then apply gram schmidt
@dapper jolt would you like to have (b) be broken down into somewhat more elementary steps?
yeah that'd be nice
Let v ∈ V \ {0}.
(i) Prove that Jv ≠ 0.
(ii) Prove that Jv is not a scalar multiple of v.
(iii) Hence prove that {v, Jv} is a basis of V.
(iv) Hence prove that (v, Jv) is exactly the ordered basis you are looking for.
if A and B are singular matrices and A+B is also singular and AB=BA then does it mean A^2+B^2 is singular and what about A^3+B^3 and what about A^4 + B^4 ? (A and B are matrices in size of nxn )

regarding the proof of (b)
I don't get why we need row and column operations
can't we just put P=[B] and Q=[C] since multiplication by a matix can be viewed as a linear transformation? (B and C are from the proof of (a))
i think so as well

but they probably want the proof of (b) to be from an entirely different angle, that doesn't rely on the direct connection b/w linear transformations and matrices
sigh
anyways the vector space proof is a lot cleaner anyways so :/

{kind=link}
{kind=link}
{kind=link}
{kind=link}

the 0 vector of two different vector spaces is technically a different object, right?
well yea the 0 depends on the vector space we're talking about
Well for subspaces the 0 has to be the same
By uniqueness of the additive identity
Hi, just seeking clarification. after checking out Gilbert Strang's linear algebra course for a little bit, is it right to assume that matrices and vectors can be assumed to anything and requires context?
like for eg```
| 1 5 |
| 2 4 |
i think you're overthinking it
a matrix is a matrix
if it represents something then it'll be made clear in context
$$\begin{pmatrix} 1 & 5 \ 2 & 4 \end{pmatrix}$$ is a matrix. $$\begin{pmatrix} 1 \ 2 \end{pmatrix}, \begin{pmatrix} 5 \ 4 \end{pmatrix}$$ are two vectors. \begin{align*} 1x+5y&= 0 \ 2x+4y&=0\end{align*} is a linear system of equations with two equations and variables. these are all different things
there is an obvious way to convert between them. but at first they are all different things
Denascite

sometimes we don't make a huge distinction between any of those because there is such an obvious way to translate between all them. but they are different
ahh alright, thanks for the answer. I will think in context
ahhh I see, I guess I got confused when we look at matrix as a column space but then proceed with row elimination.
btw, is that regex up there? for the math drawings, thats so cool
That's latex
ahhh, looks so complex but the result is really cool
Yeah it has a steep learning curve
I don't understand why we get (4,-3)

do you see why (4,-3) is a solution to the system?
yeah but suppose there's something more abstract
suppose we have an eigenvalue t for some linear operator T and want to find the eigenvector
after doing the matrix representation with the basis
we find v the respective eigenvector for t by Tv = tv
what's the algorithm then?
well we solve the linear system (T-tI)v=0
if we already know t
and that's just a linear system which we solve in the usual way
for example by row reduction
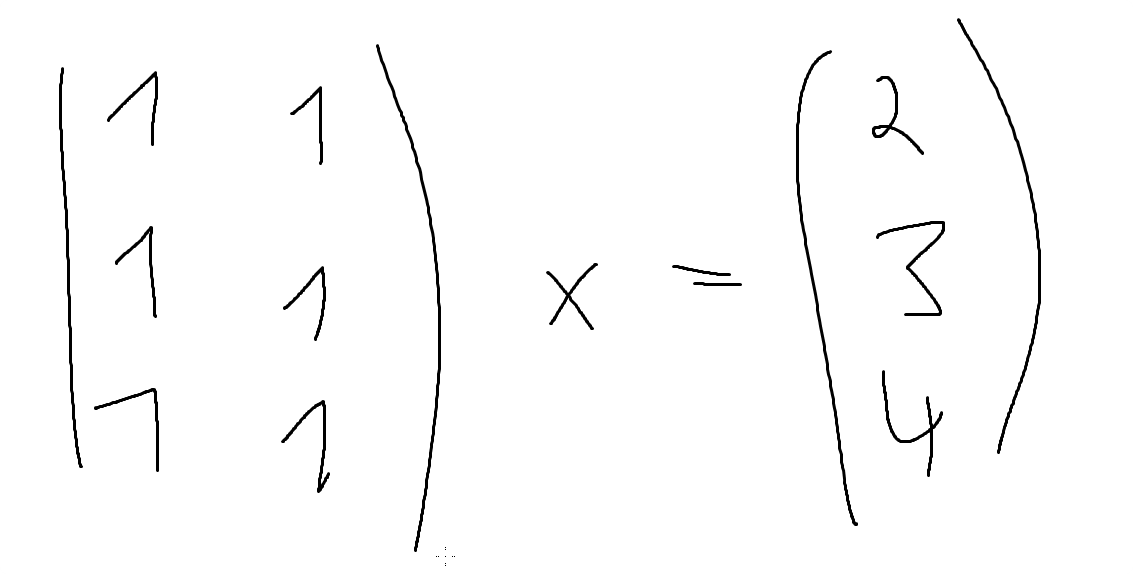
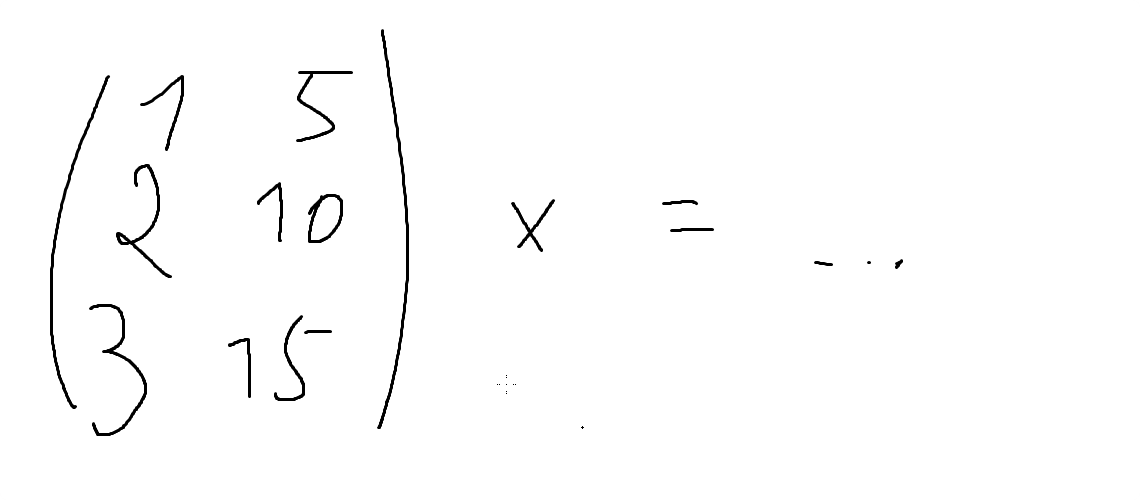
How would I solve this? I just need a start.
